Advanced Artificial Intelligence⚓︎
约 3991 个字 预计阅读时间 20 分钟
Hierarchical Tasks Network⚓︎
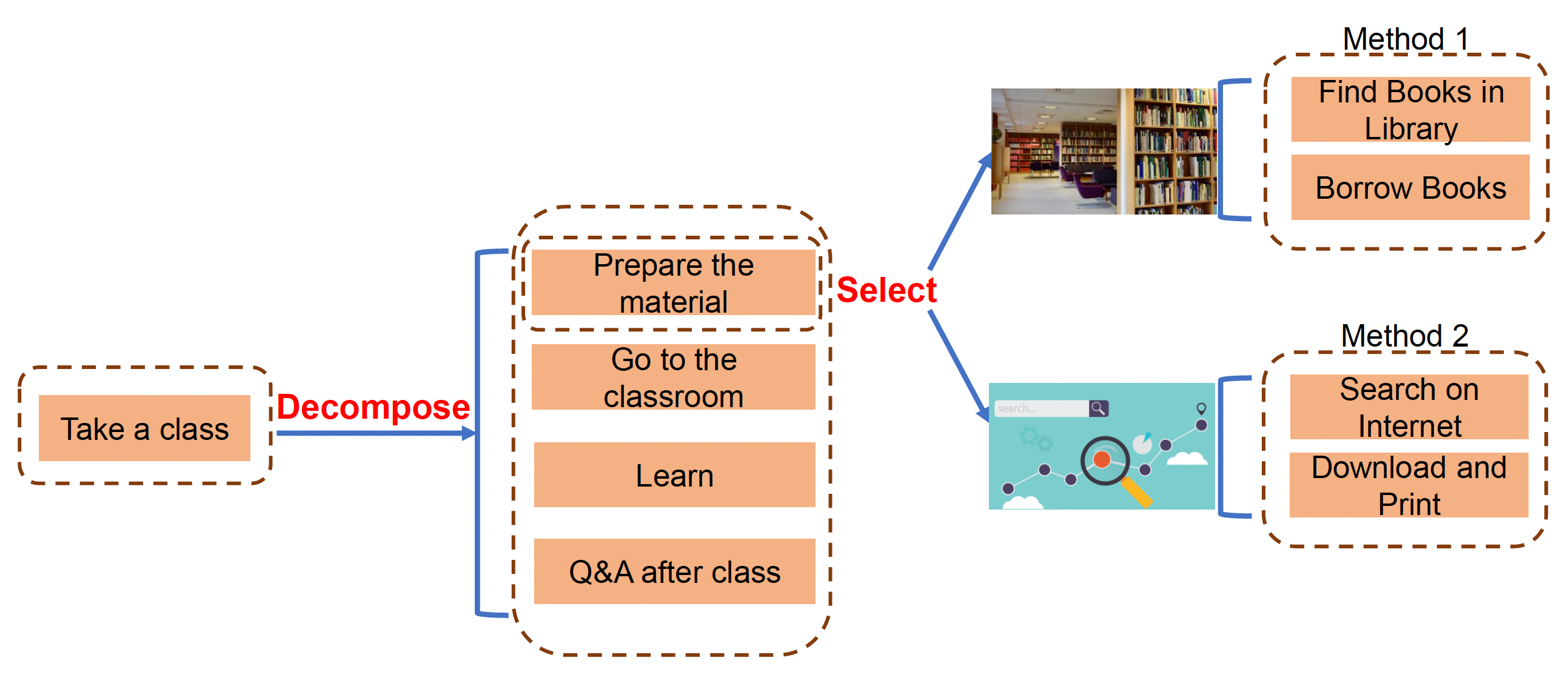
层级任务网络(hierarchical tasks network, HTN) 假定游戏中有很多层级任务(hierarchical tasks)。
HTN 的核心思想是像人类那样分层制定计划。
Framework⚓︎
HTN 的框架由以下几部分组成:
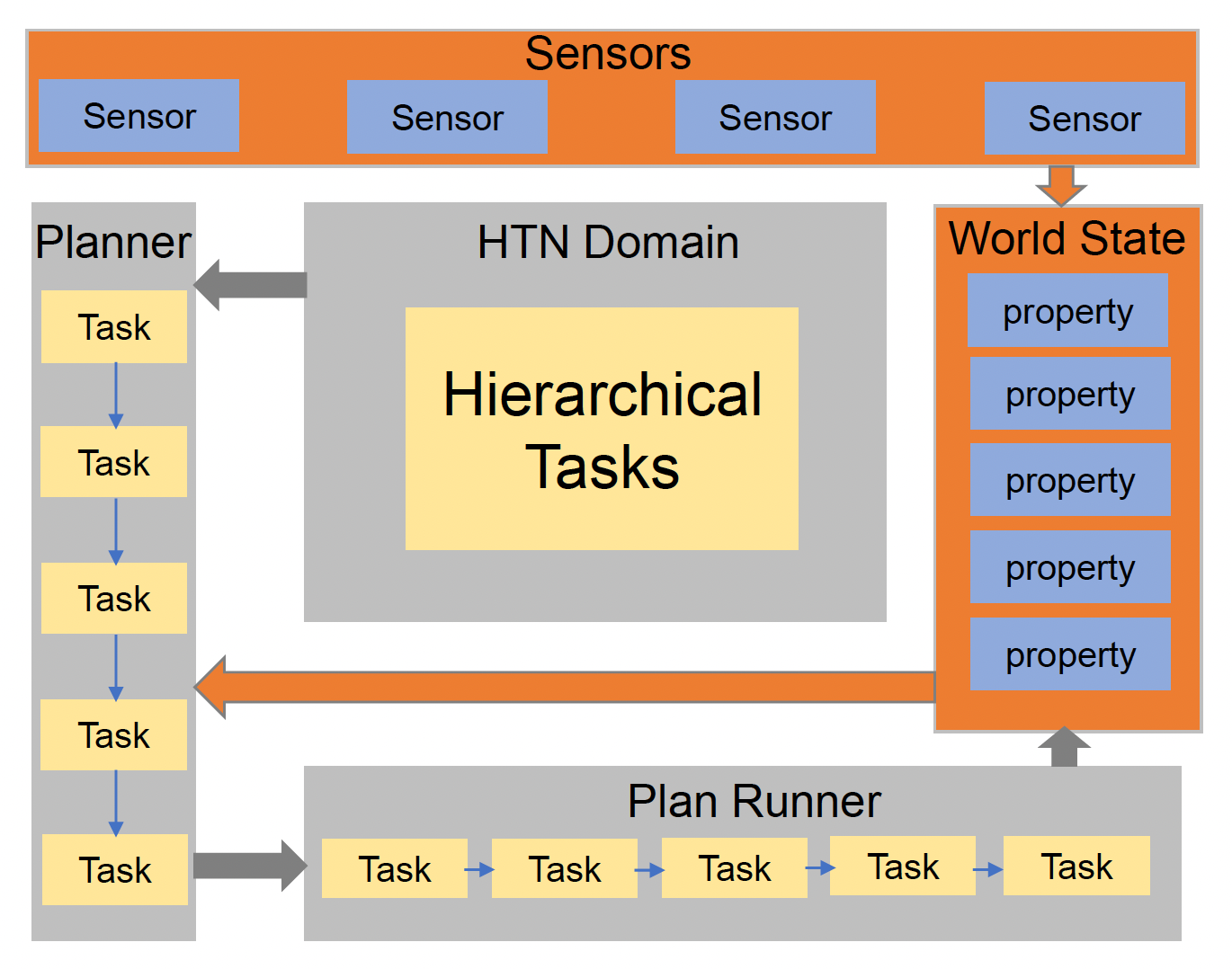
- 世界状态(world state):
- 包含一堆属性
- 作为计划者的输入,反映了世界的状态
- 它是 AI 大脑对世界的主观(subjective) 看法(不是客观存在
! )
- 传感器(sensor):
- 感知环境变化并修改世界状态
- 类似前一讲介绍的感知(perception)
- HTN 域(HTN domain):
- 从资产处加载
- 描述层级任务的关系
- 计划者(planner):制定从世界状态到 HTN 域的计划
- 计划运行者(plan runner):执行计划,并在任务后更新世界状态
Task Types⚓︎
层级任务分为两类:
-
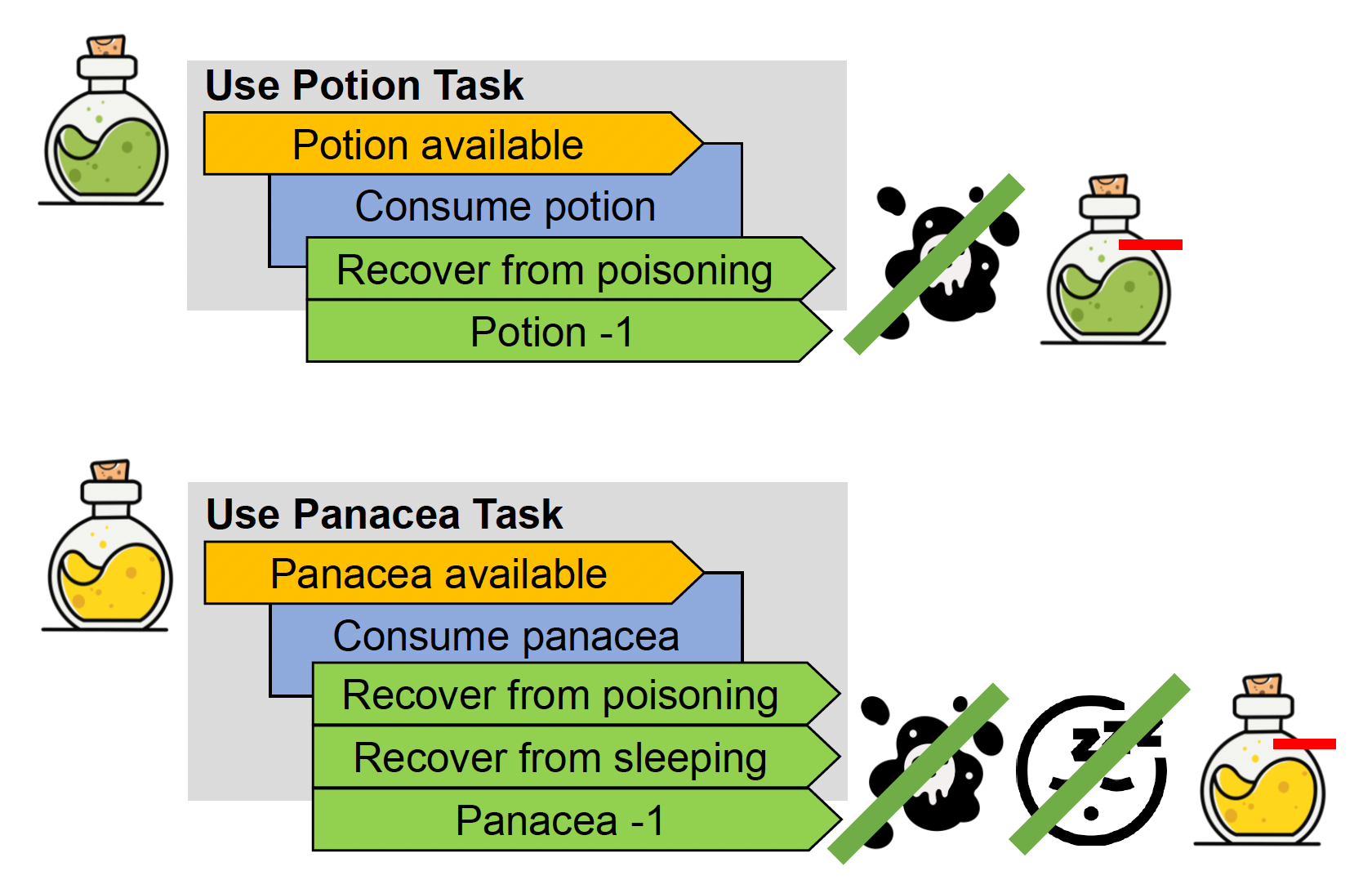
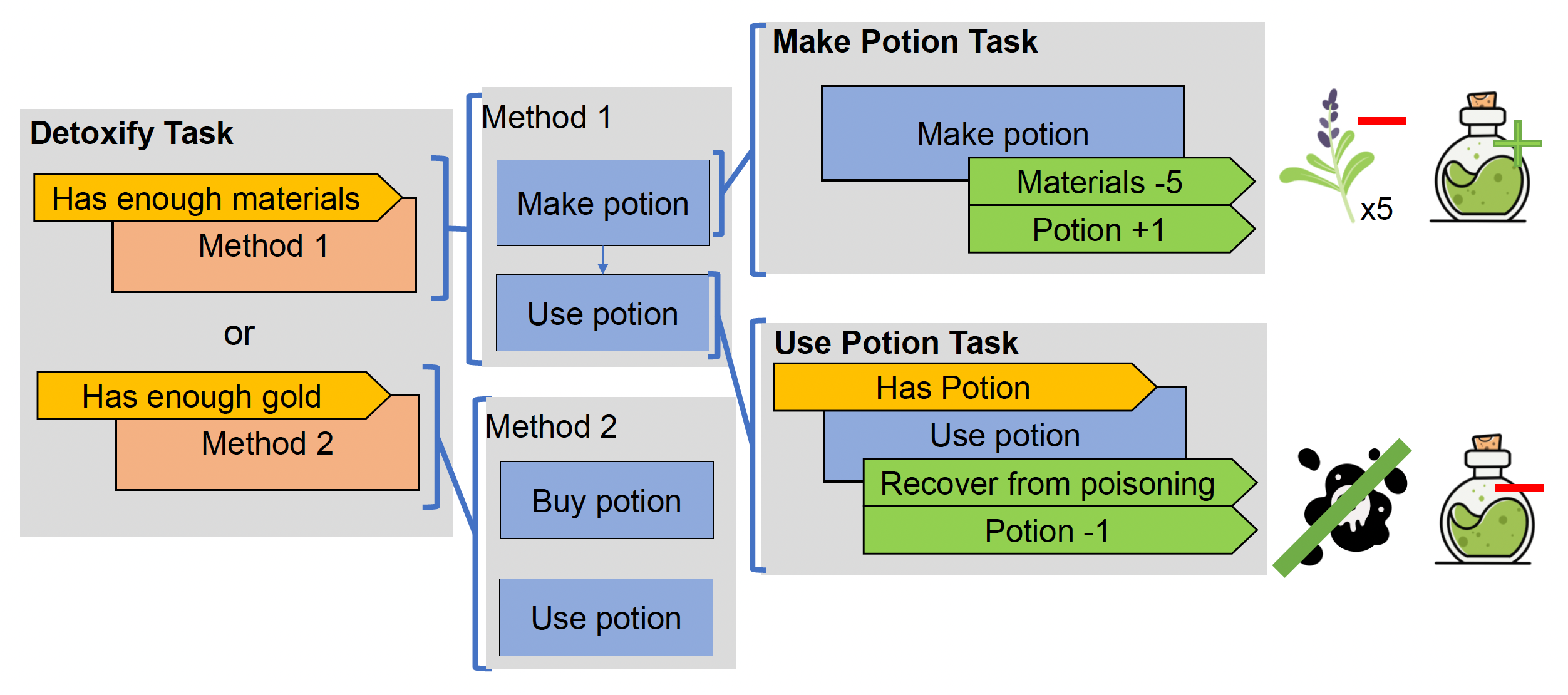
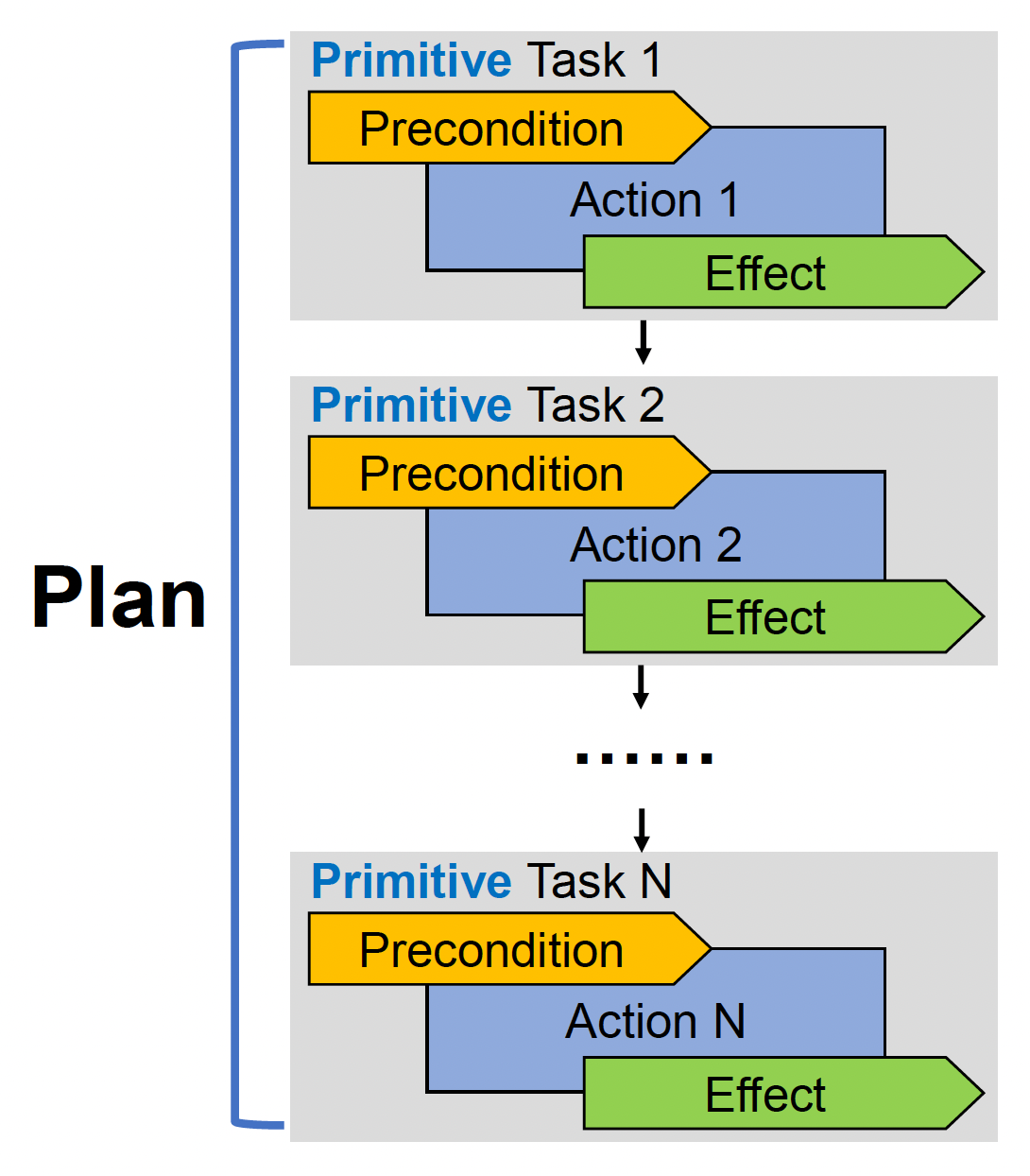
基本任务(primitive task),分为三部分:
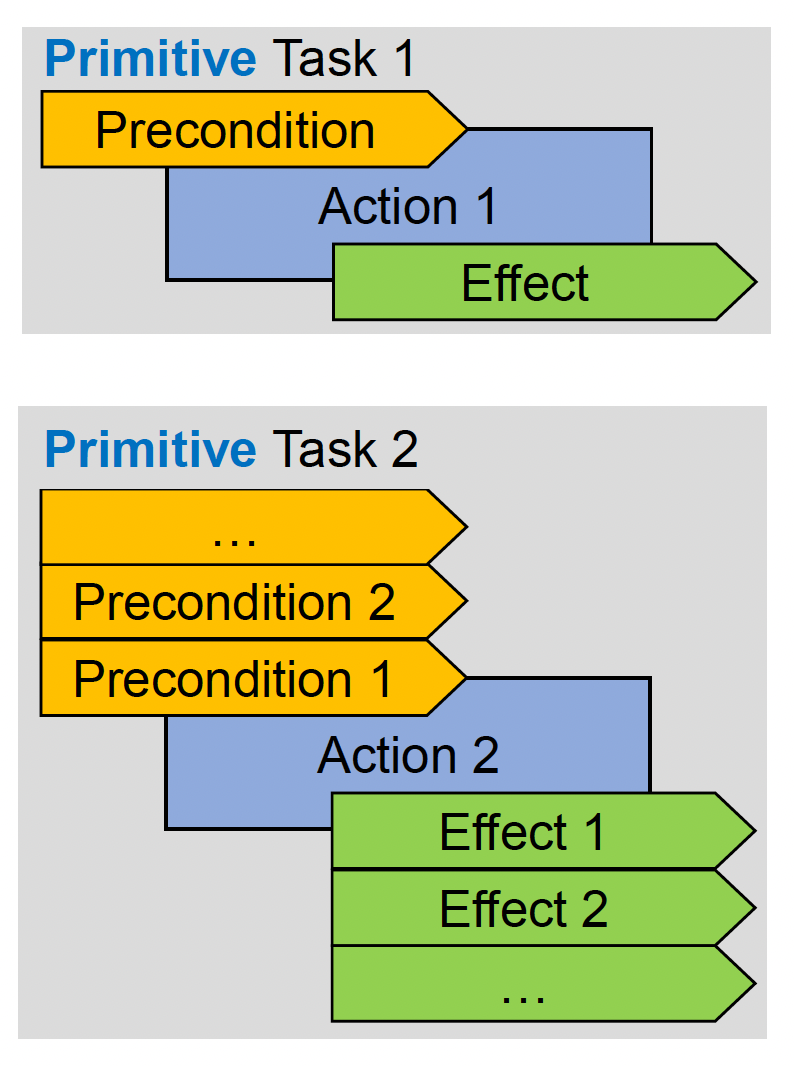
- 前提(precondition):确定行动是否要被执行,检查游戏世界属性是否被满足
- 行动(action):确定基本任务要执行的行动
- 效果(effect):确定基本任务如何修改游戏世界状态属性
例子
-
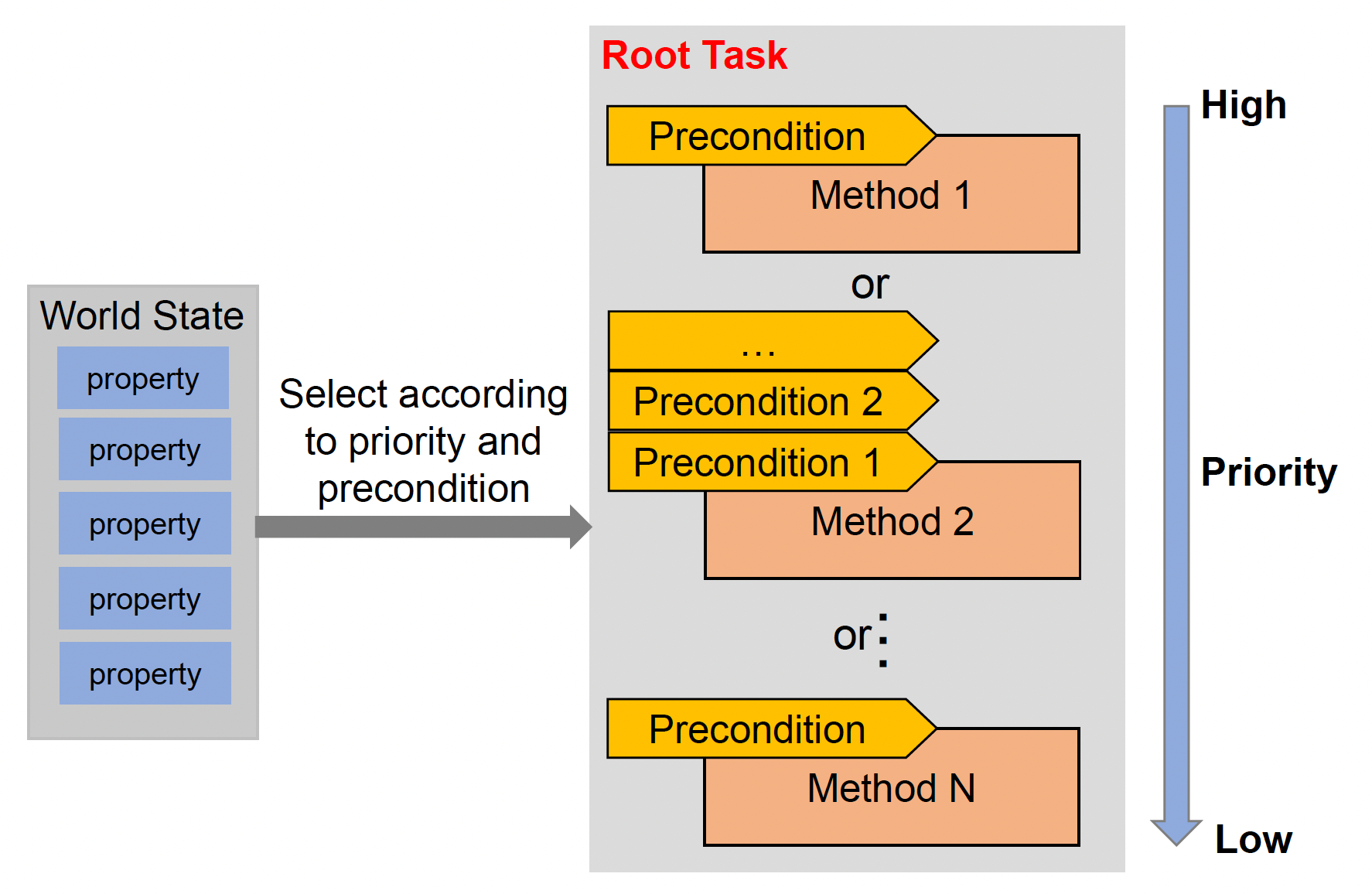
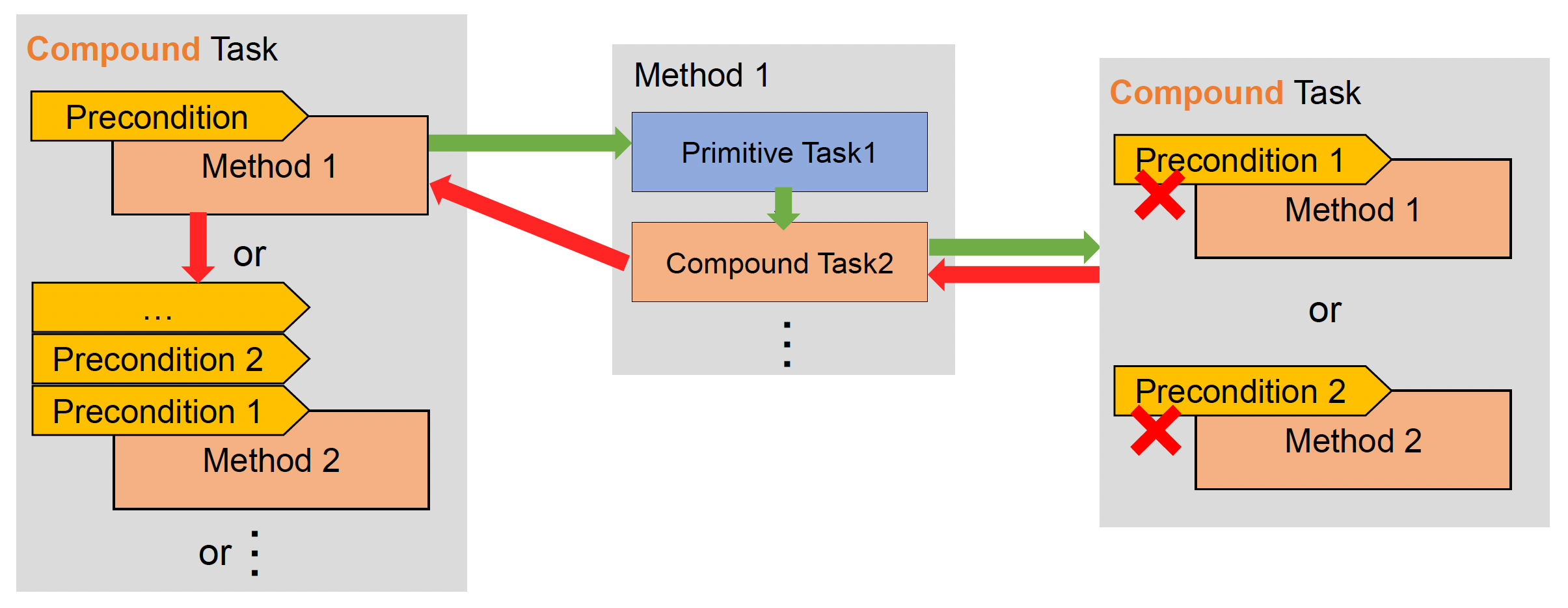
复合任务(compound task):
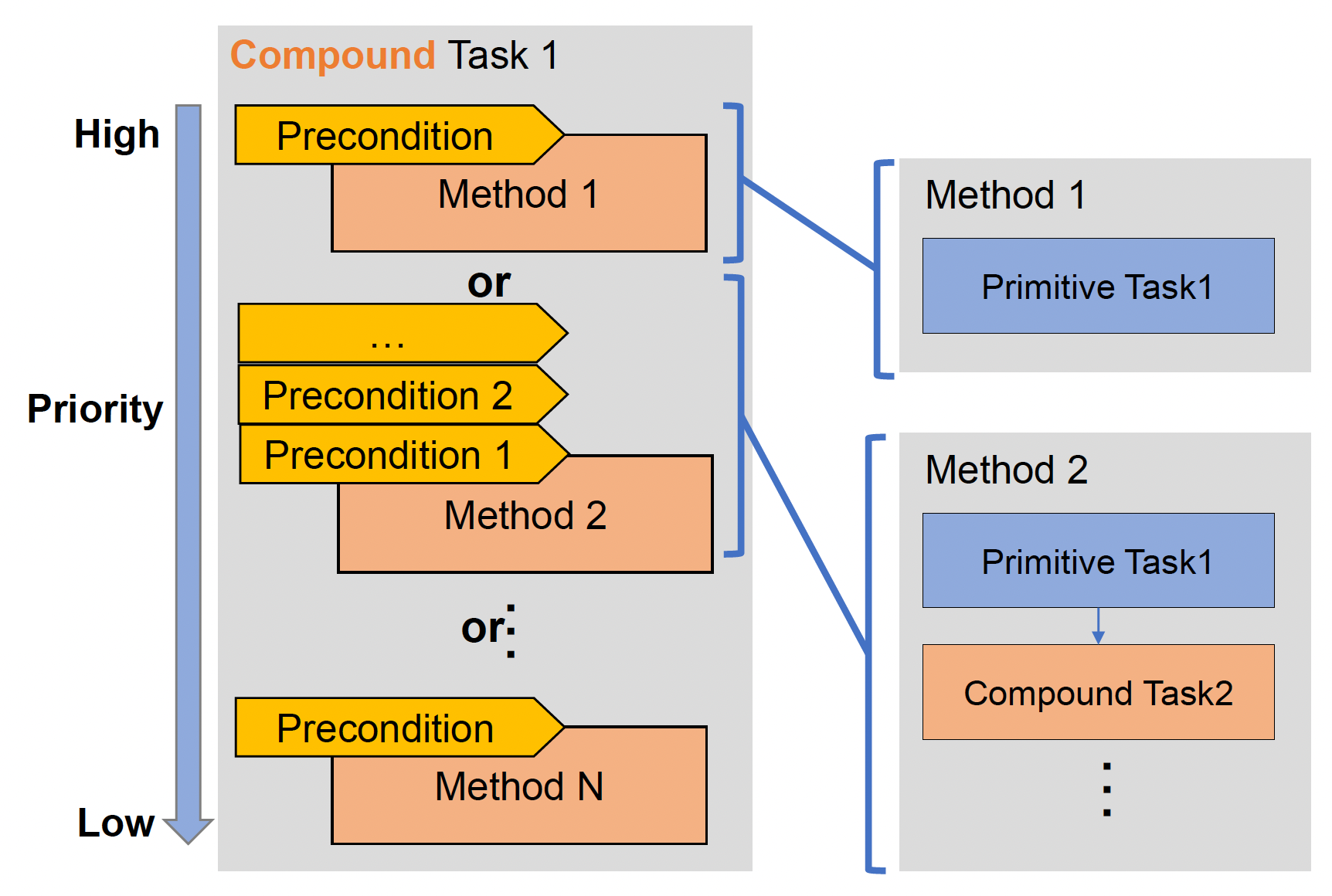
- 包含多个方法,每个方法有各自的前提和不同的优先级
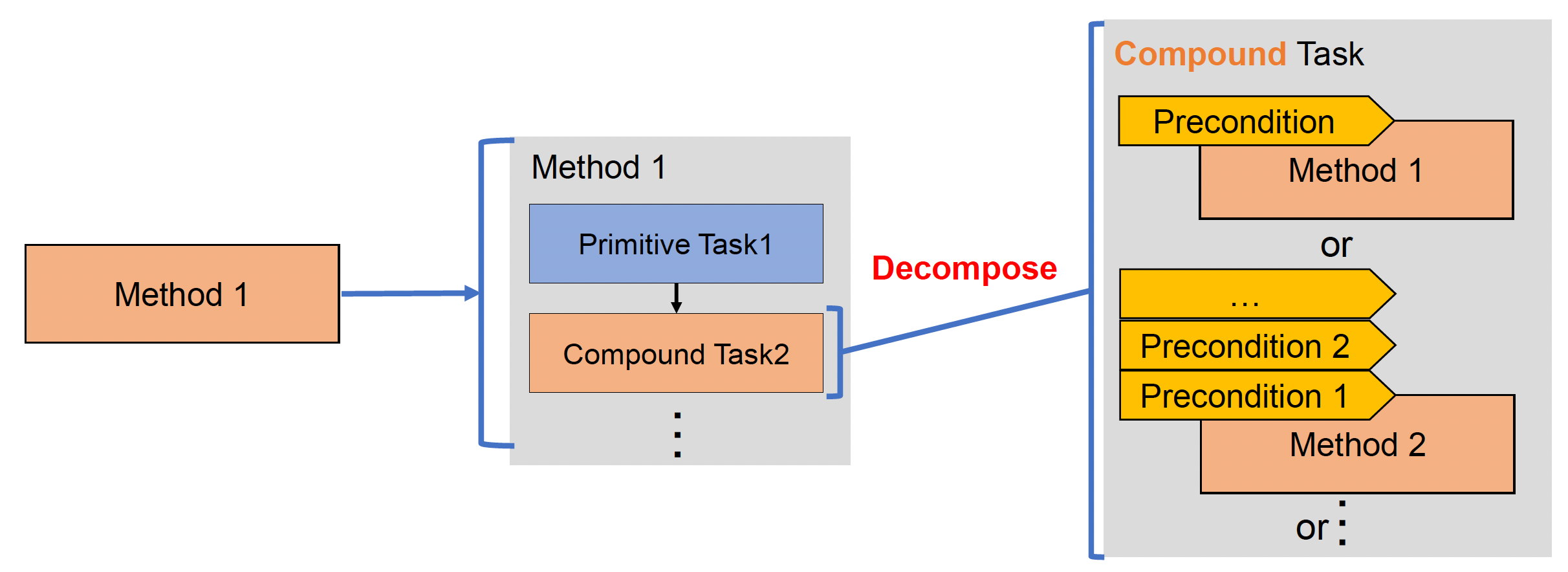
- 方法(method):一条子任务链,每个子任务可以是基本任务,也可以是复合任务
例子
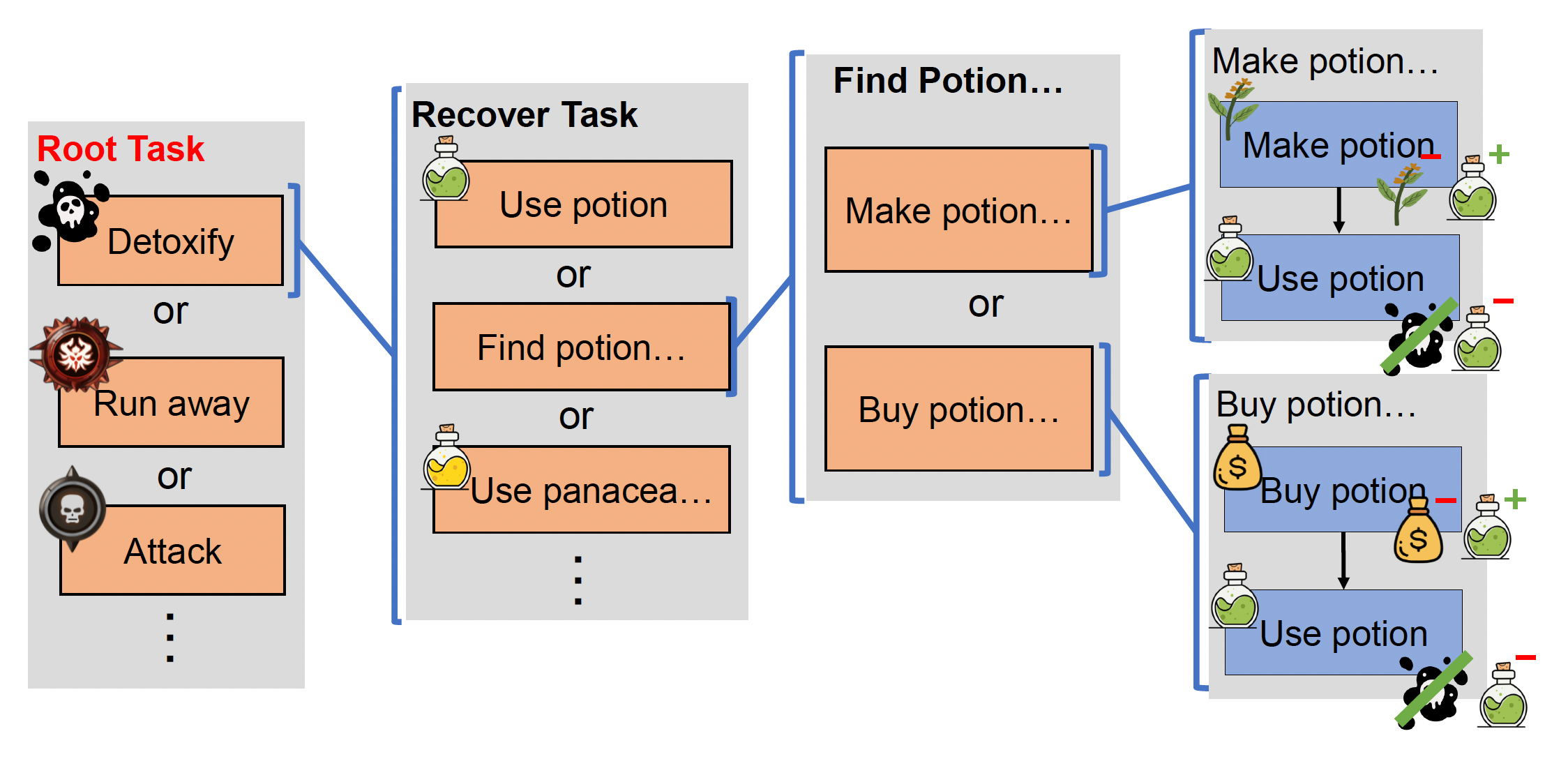
HTN 域就是将这两类任务作为基本构建块搭建而成的。需要注意的是每个 HTN 域都有一个根任务(root task),它本质上是一个复合任务。
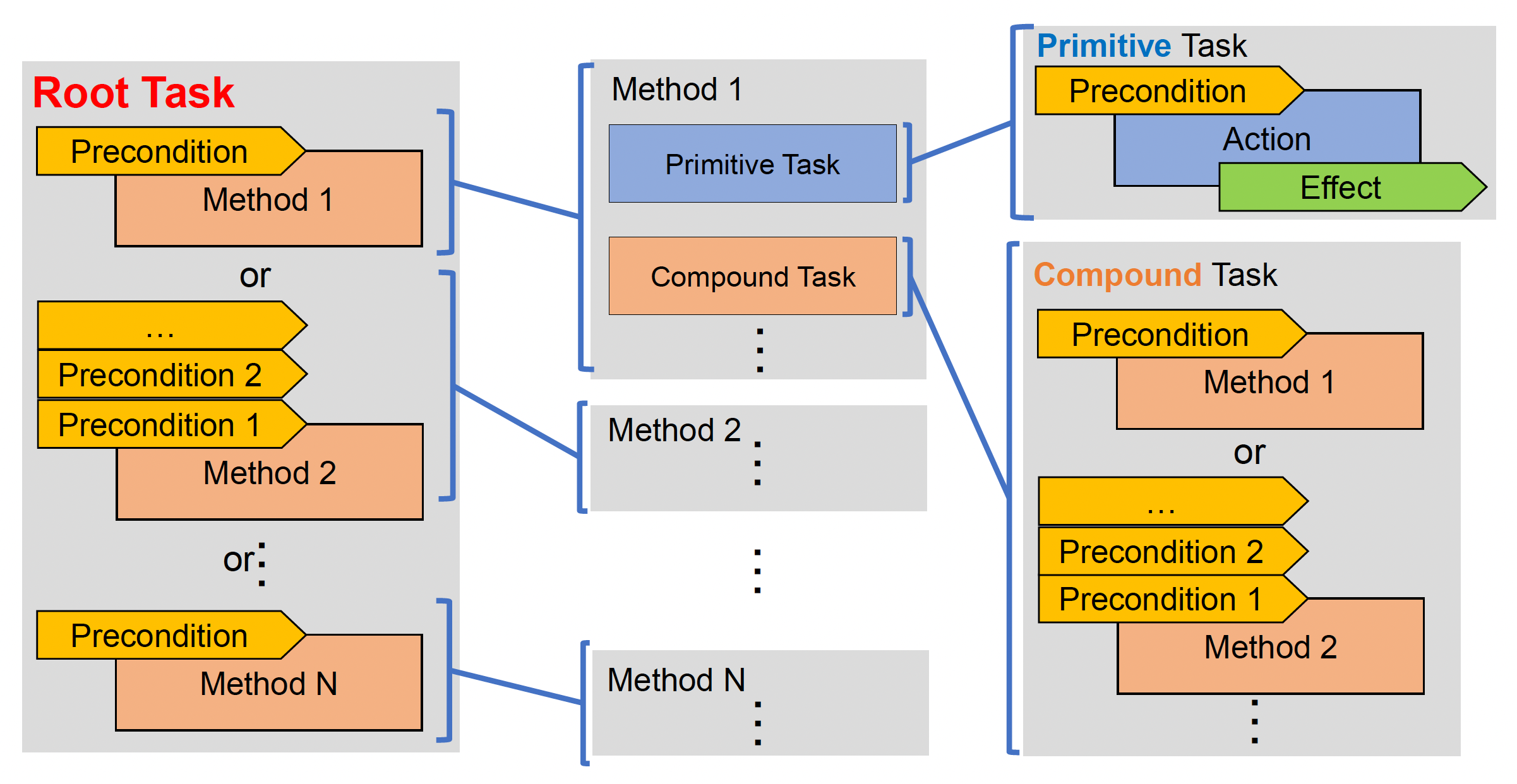
例子
Planning⚓︎
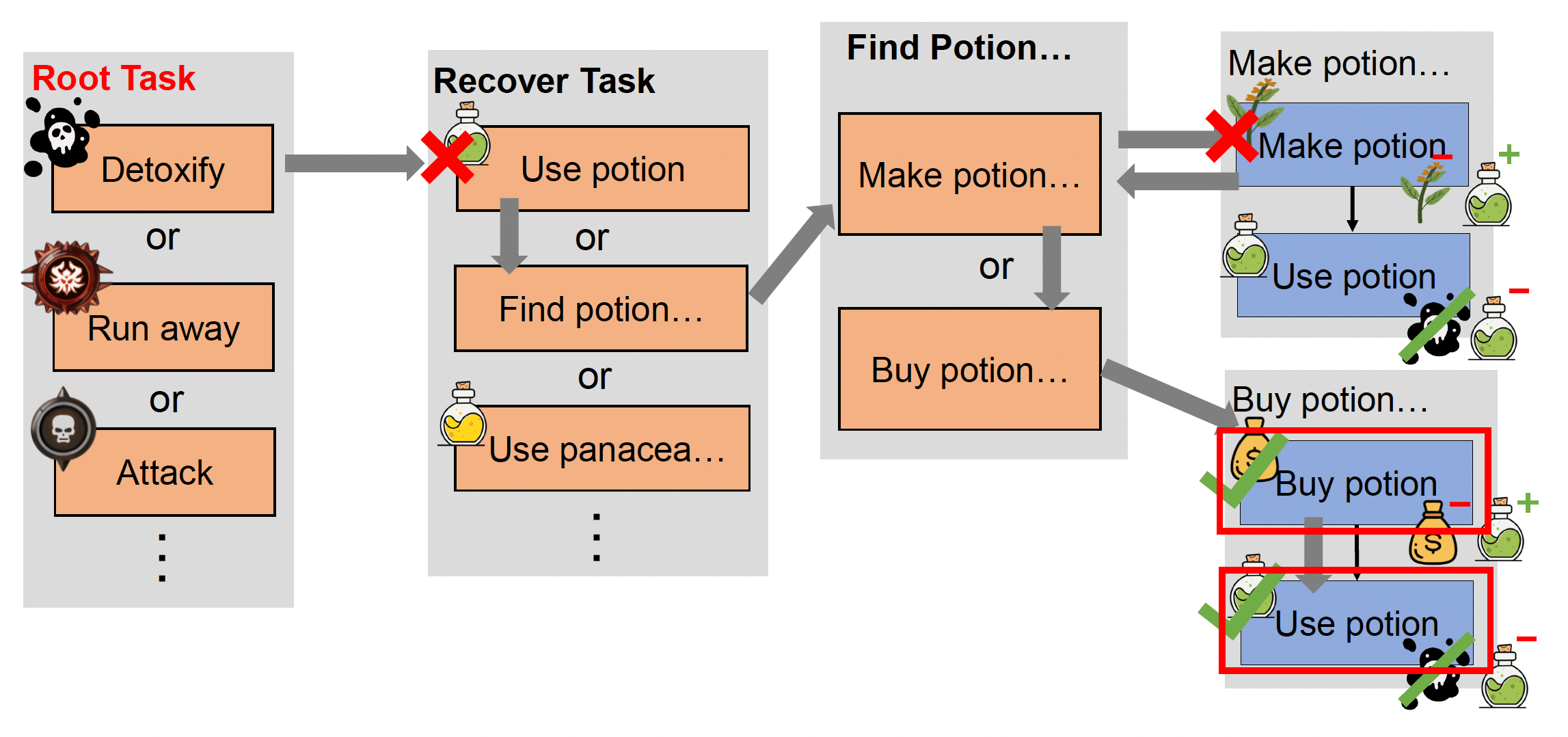
确定好 HTN 域后就可以开始计划了,具体流程如下:
-
从根任务开始,按顺序选择满足前提的方法
-
将方法分解为任务,按顺序检查前提;若为复合任务,则进一步分解
-
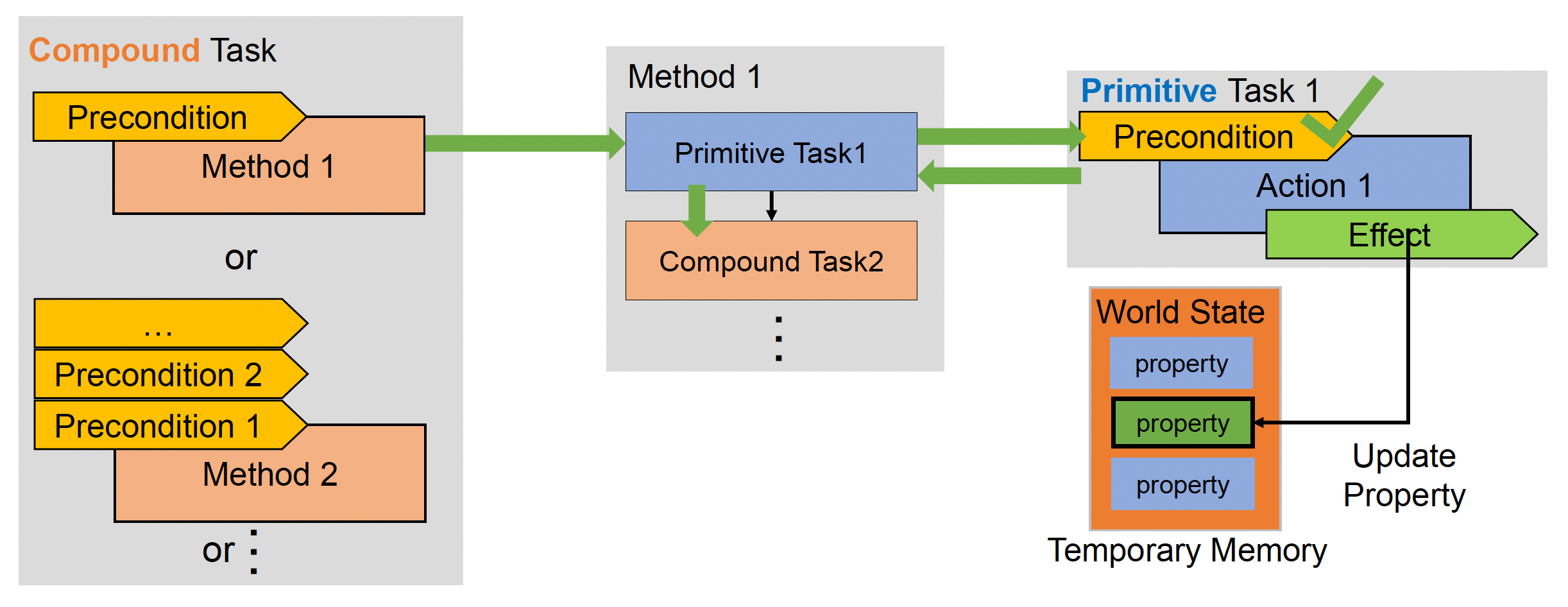
对于基本任务
- 假设所有行动都被会成功执行,在临时内存(temporary memory) 中更新世界状态
-
所以在制定计划时,世界状态有一个用作草稿的副本
-
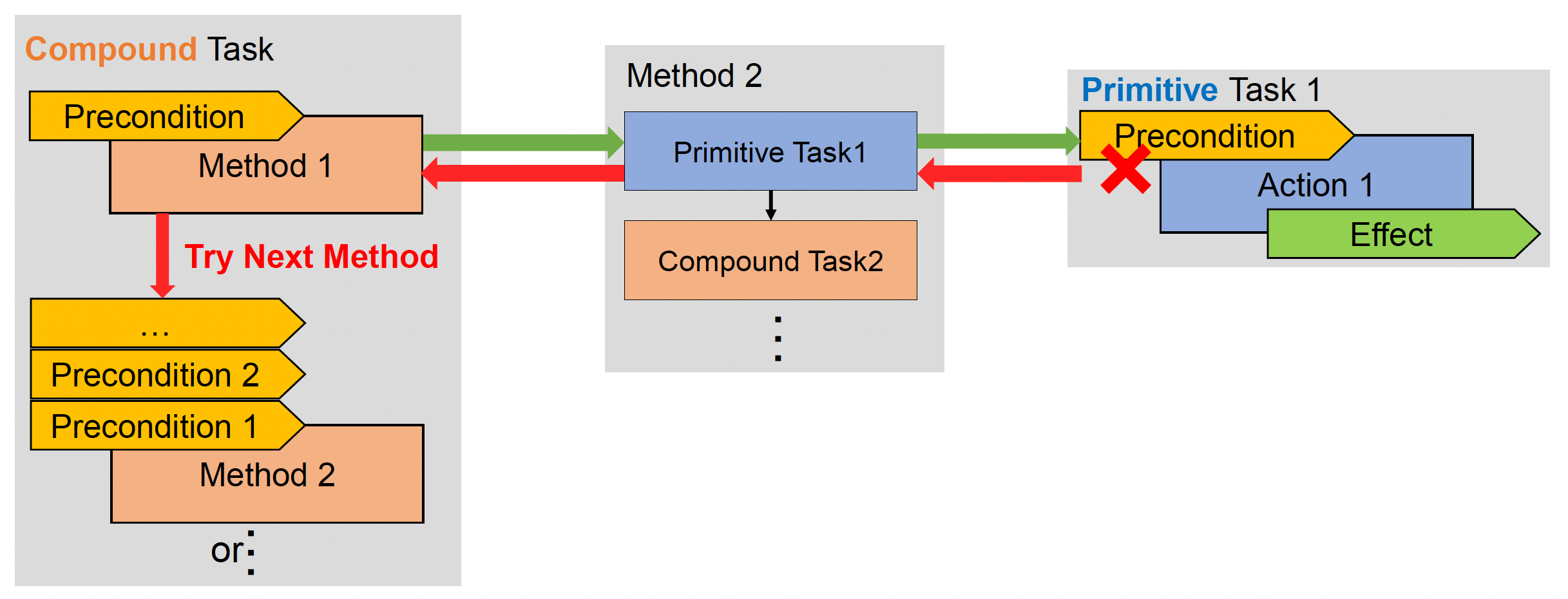
若前提不满足,返回并选择新方法
-
对于复合任务:若前提不满足,返回并选择下一个方法
-
-
重复步骤 2,直到没有要做的任务;最终计划仅包含基本任务
例子
Running Plan and Replanning⚓︎
有了计划后,接下来便要运行计划。
-
按顺序执行任务
- 检查前提,若不满足则返回失败
- 执行行动
- 若成功,则更新世界状态并返回成功
- 否则返回失败
-
当所有任务成功,或其中一个任务失败时返回
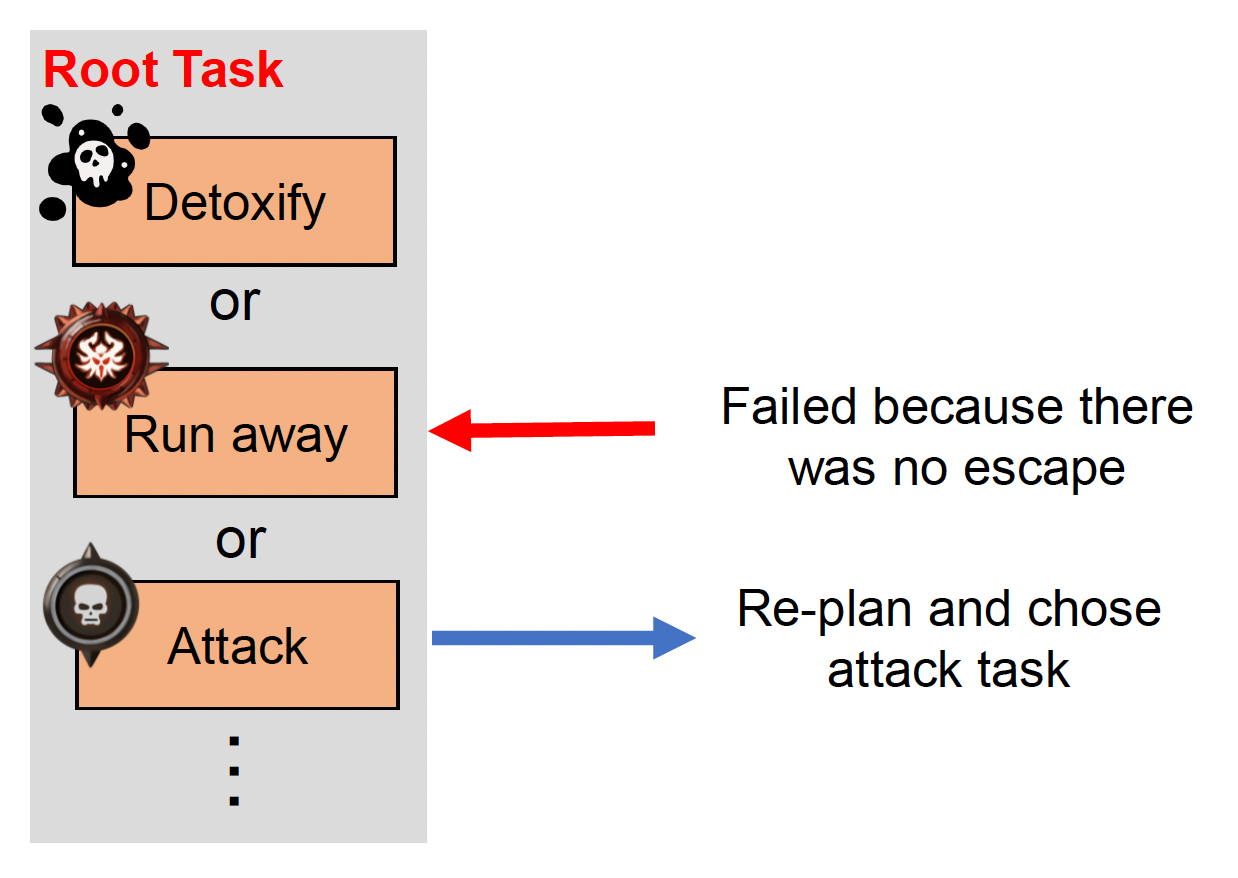
遇到以下情况之一时,智能体会开始制定计划:
- 没有计划
- 当前计划已结束或失败
- 传感器发现世界状态已改变
例子
优点
- HTN 和 BT 类似,但它是更高层级的(抽象)
- 能输出具有长期影响的计划
- 相同情况下比 BT 更快
缺点
- 玩家行为不可预测,所以任务很容易失败
- 对设计师来说,世界状态和任务效果是很有挑战的
- 在高度不确定的环境下,HTN 的表现不稳定
Goal-Oriented Action Planning⚓︎
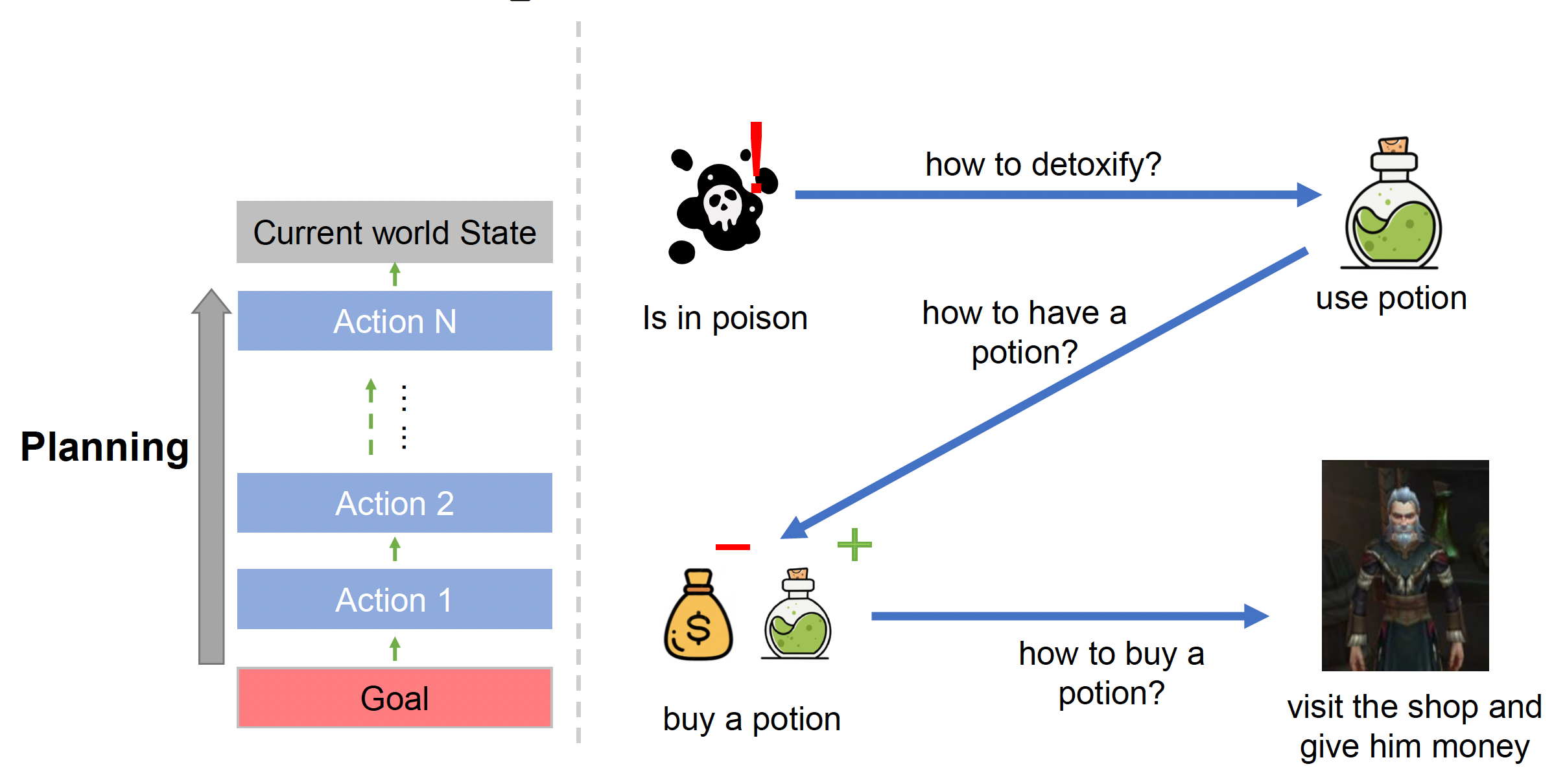
面向目标的行动计划(goal-oriented action planning, GOAP) 是一种更加自动化(automated) 的方法,且是一种反向(backward) 而非正向的计划。
Structure⚓︎
GOAP 的结构如下:
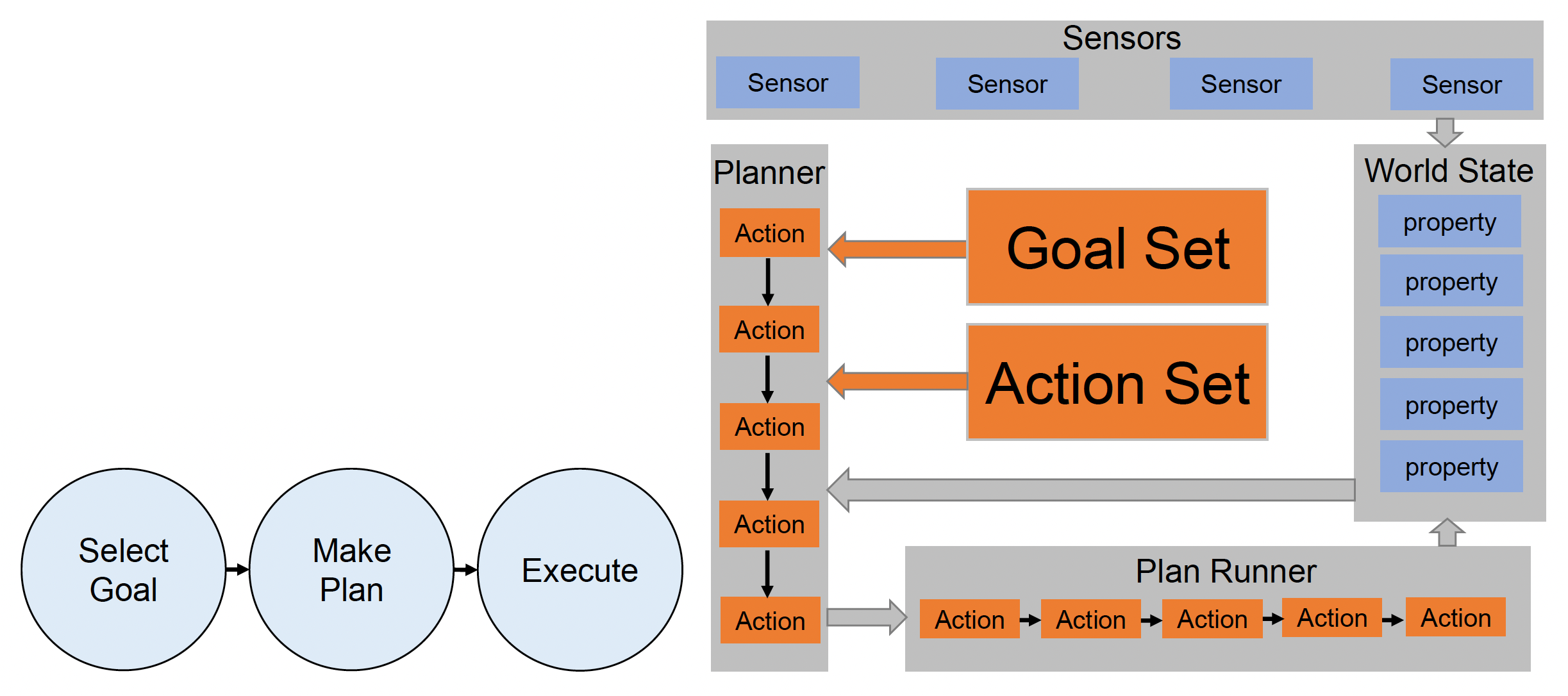
- 传感器和世界状态(和 HTN 类似)
-
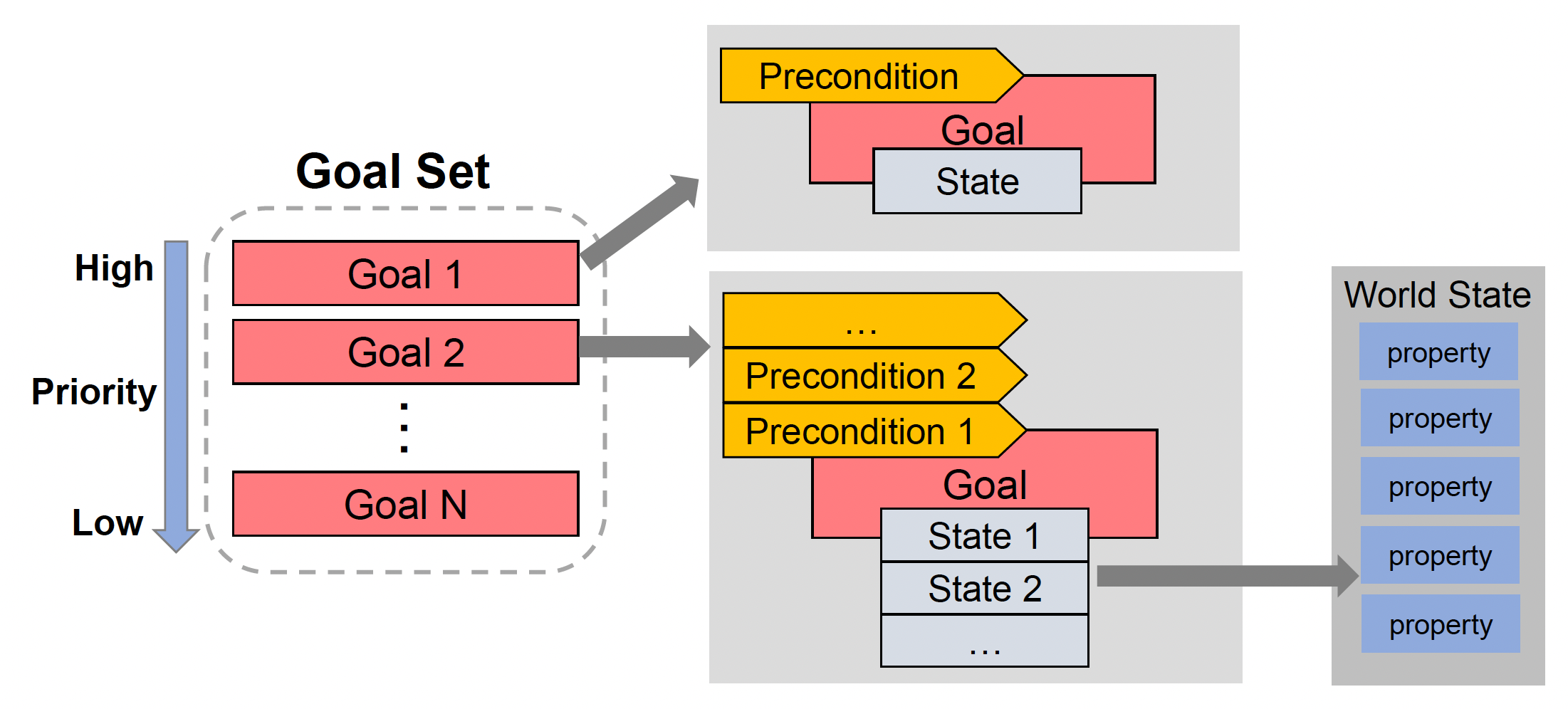
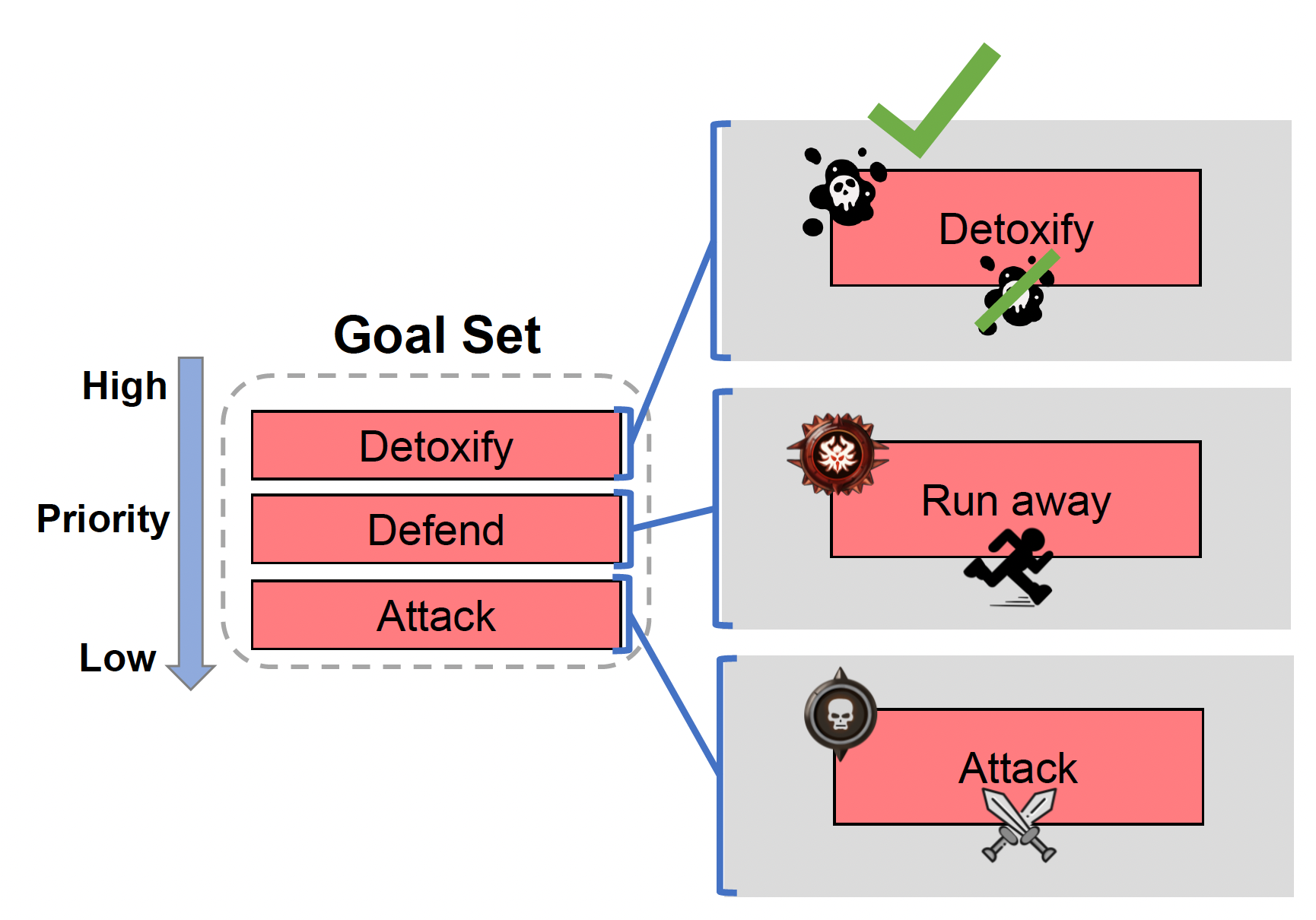
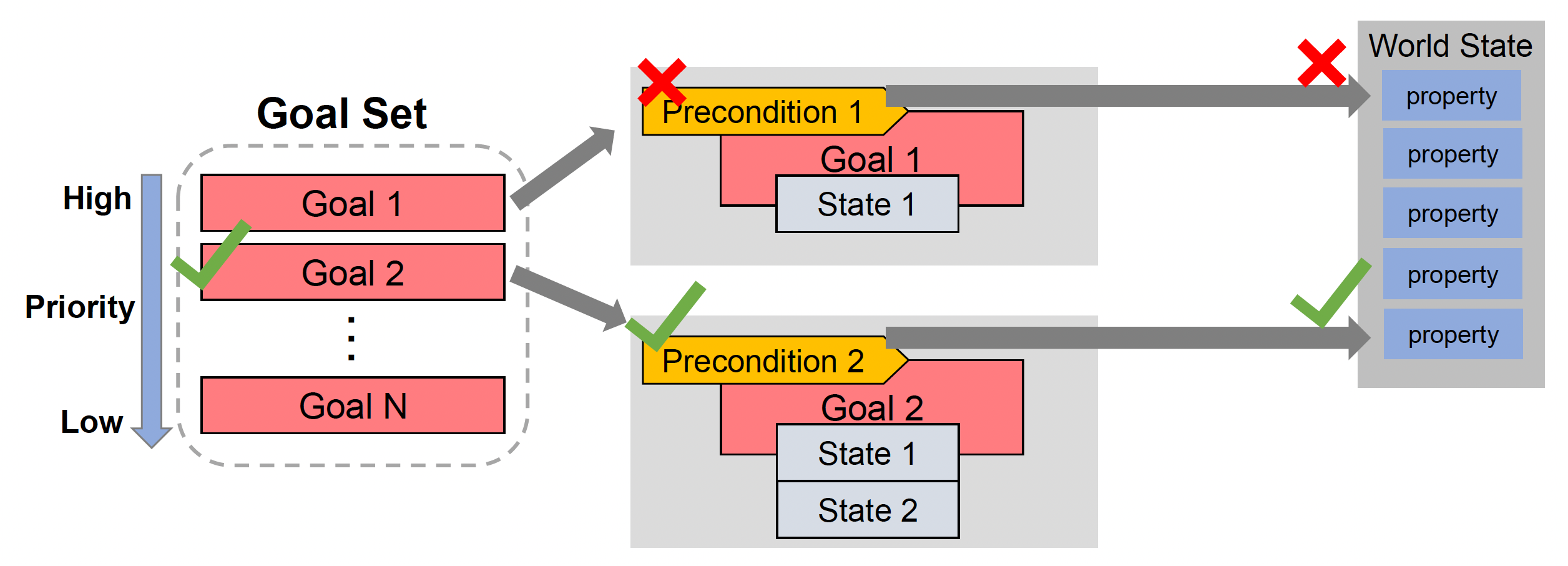
目标集(goal set):所有可用目标
- 前提决定被选中的目标
- 优先级决定在所有可能的目标中应该选择哪个目标
- 每个目标可被表示为一个状态集合(collection of states)
例子(目标选择)
-
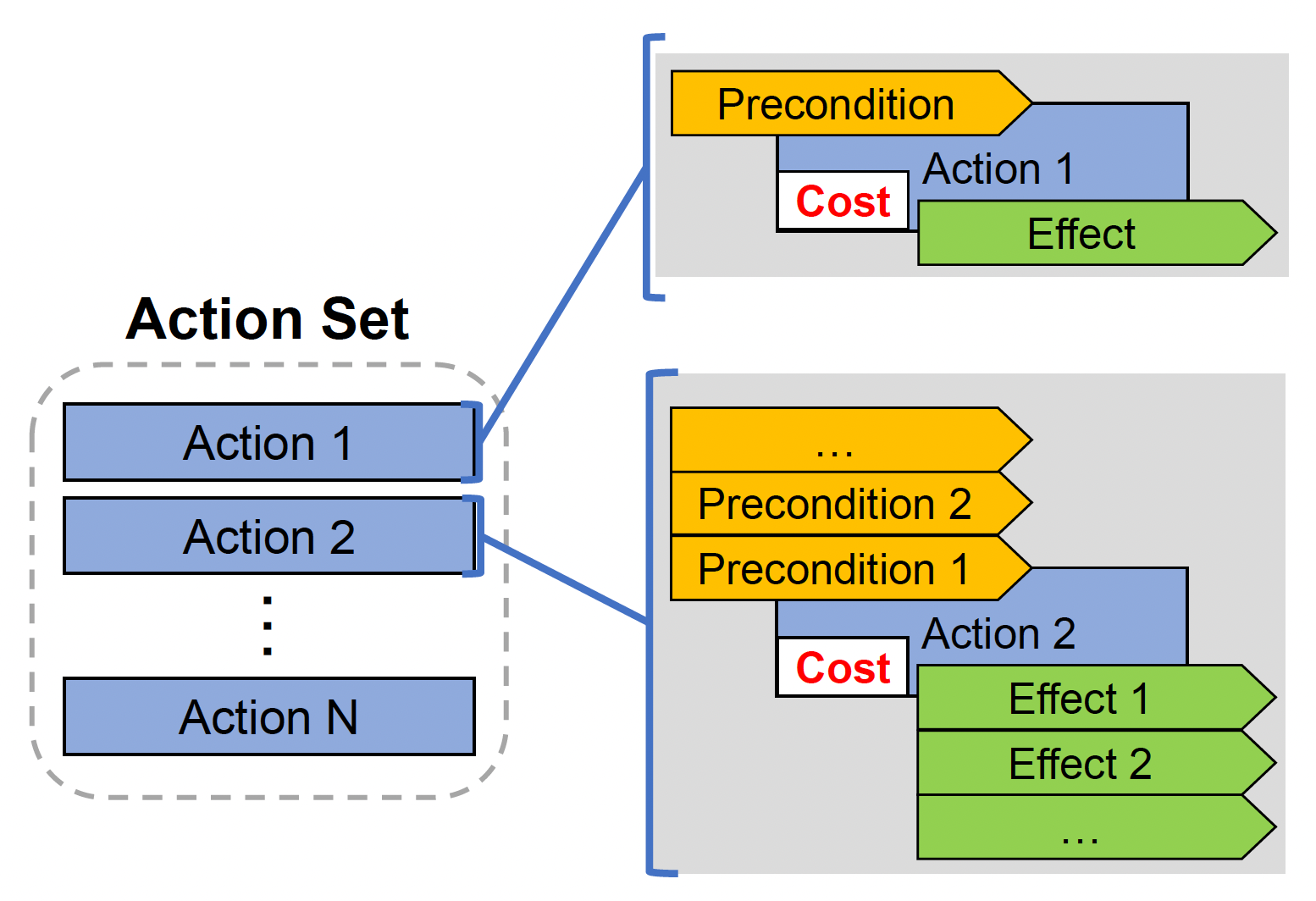
行动集(action set):所有可用行动,每个行动包含
- 前提:在何种状态下角色采取行动
- 效果:行动完成后,世界状态如何变化
- 成本:由设计师定义,用作使成本最低的计划的一个权重
-
计划者(planner):输出行动序列
Planning⚓︎
GOAP 的计划制定步骤如下:
-
根据优先级检查目标,寻找第一个满足前提的目标
-
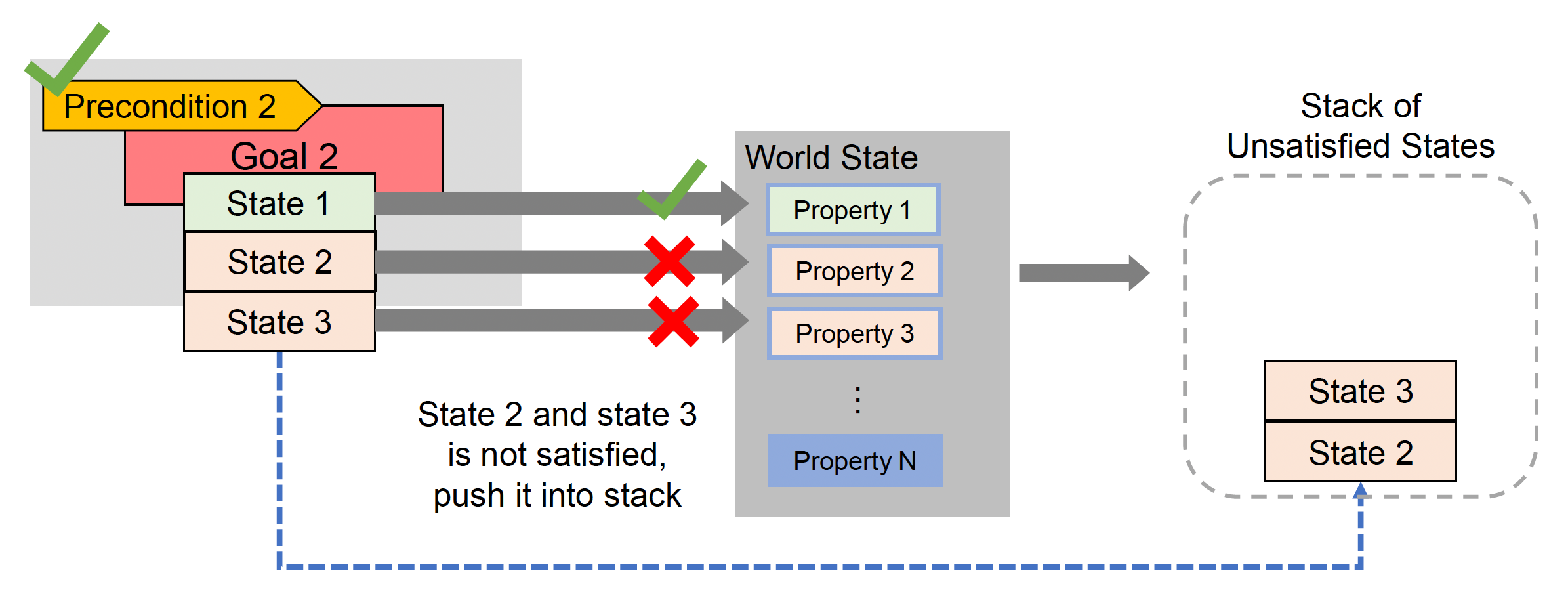
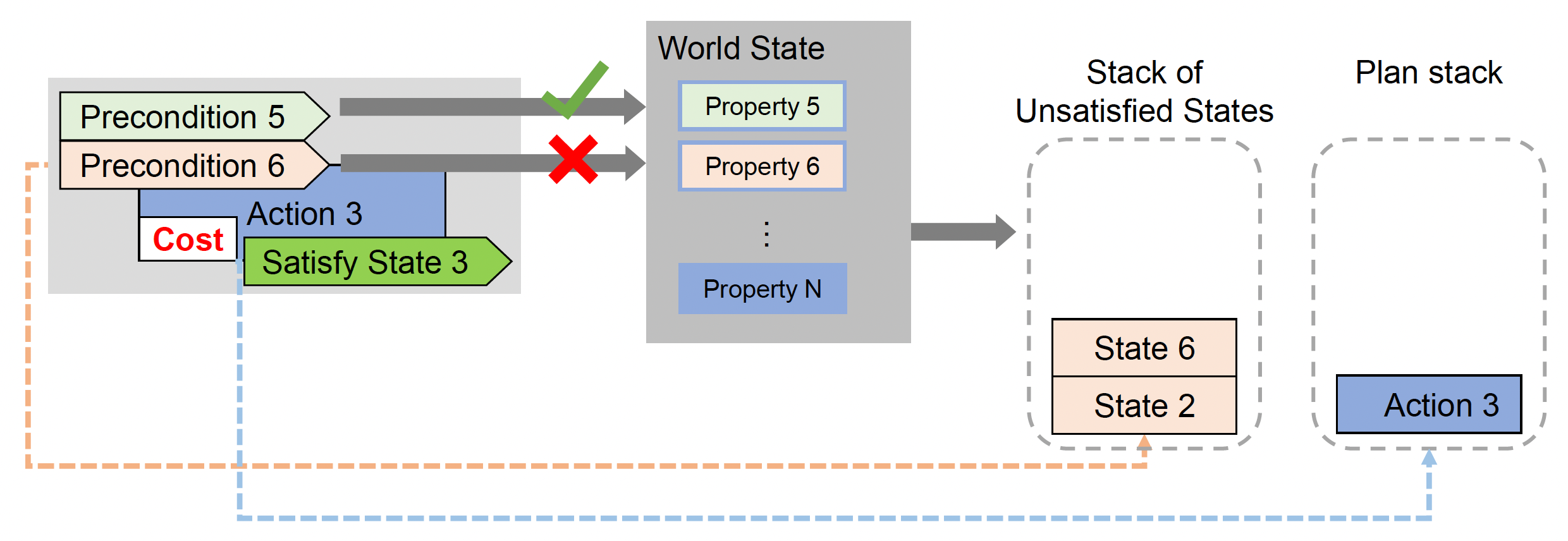
比较目标状态与世界状态,以找到未满足的目标;然后将所有未满足的目标状态放入栈中
-
检查栈顶的不满足状态,并从行动集中选择一个可以满足所选状态的行动;若所选动作满足该状态,则将其弹出
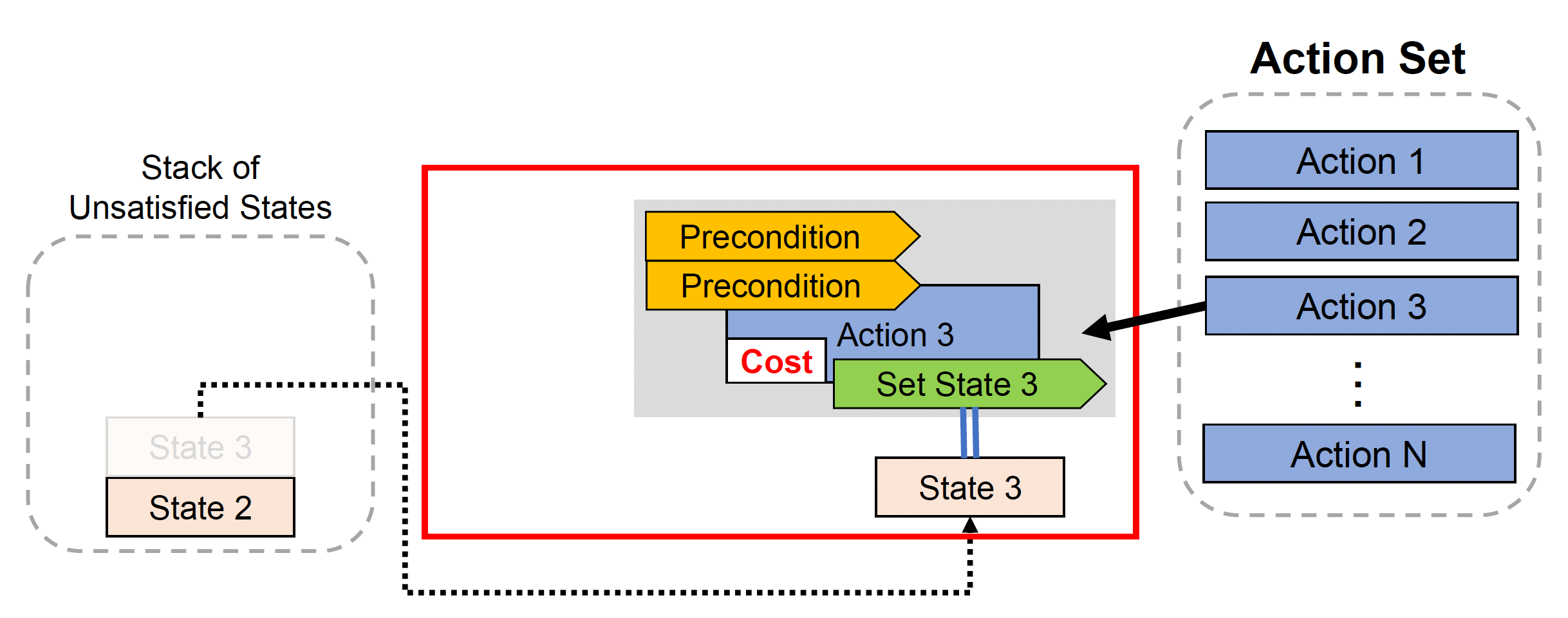
-
将行动压入计划栈(plan stack),检查对应行动的前提;若前提不满足,则将状态压入未满足状态栈(stack of unsatisfied states)
Building States-Action-Cost Graph⚓︎
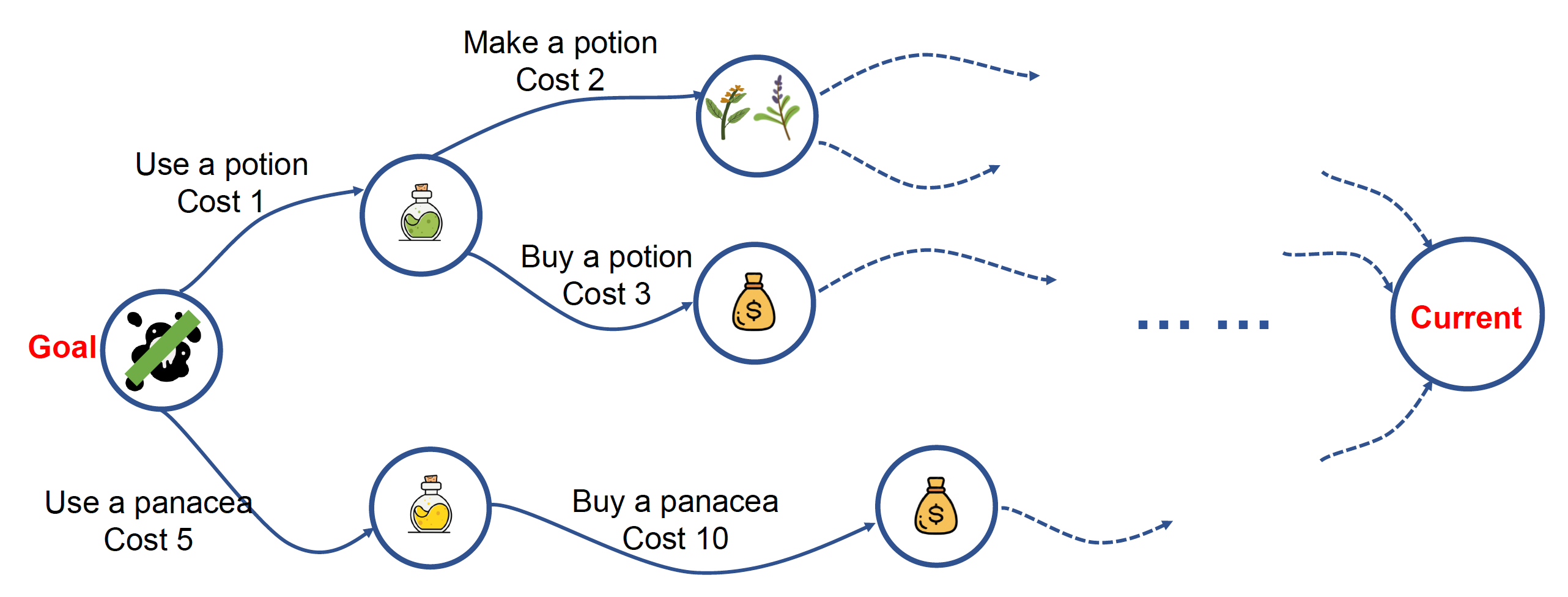
最后需要考虑的事是构建一个状态 - 行动 - 成本图,它不仅能够清空未满足状态栈,还保证在这张图上找到一条成本最小的路径(计划
- 节点:状态的组合
- 边:行动
- 距离:成本
- 搜索方向:
- 起点:目标状态
- 终点:当前状态
更具体地,我们要找一条从目标状态出发,到当前状态的最短路径。我们可以采用 A* 或别的最短路算法解决这一问题。其中启发式函数可被表示为未满足状态的数量。
例子
优点
- 相比 HTN,GOAP 更具动态性
- 目标和行为解耦
- 不容易出现(前提,效果)不匹配的错误
缺点
- 在单个 AI 系统中,计划运行时间比 BT/FSM/HTN 慢
- 同样需要良好表示的世界状态和行动效果
Monte Carlo Tree Search⚓︎
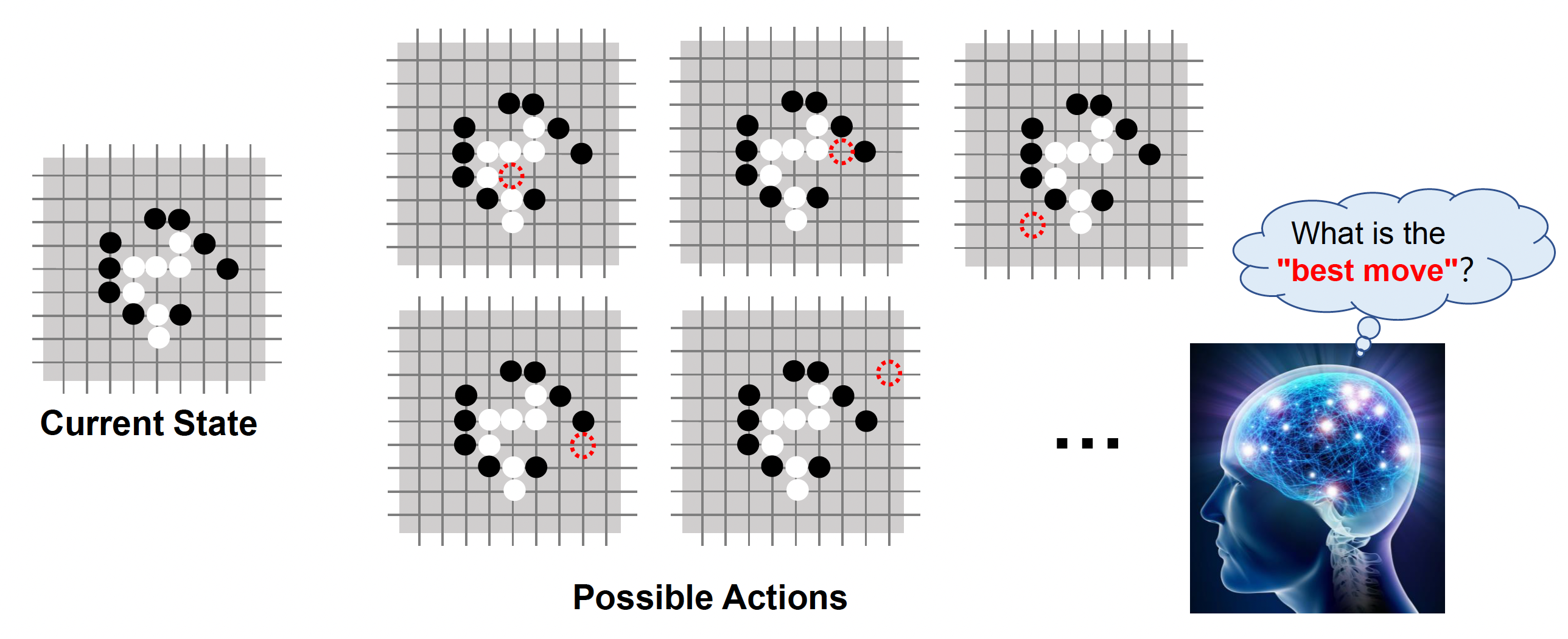
蒙特卡洛树搜索(Monte Carlo tree search, MCTS) 是另一类自动规划方法,其行为更加多样化。这种方法类似下围棋,需要在脑海中模拟数百万种可能的走法,然后选择最佳的一步。
应用

蒙特卡洛方法
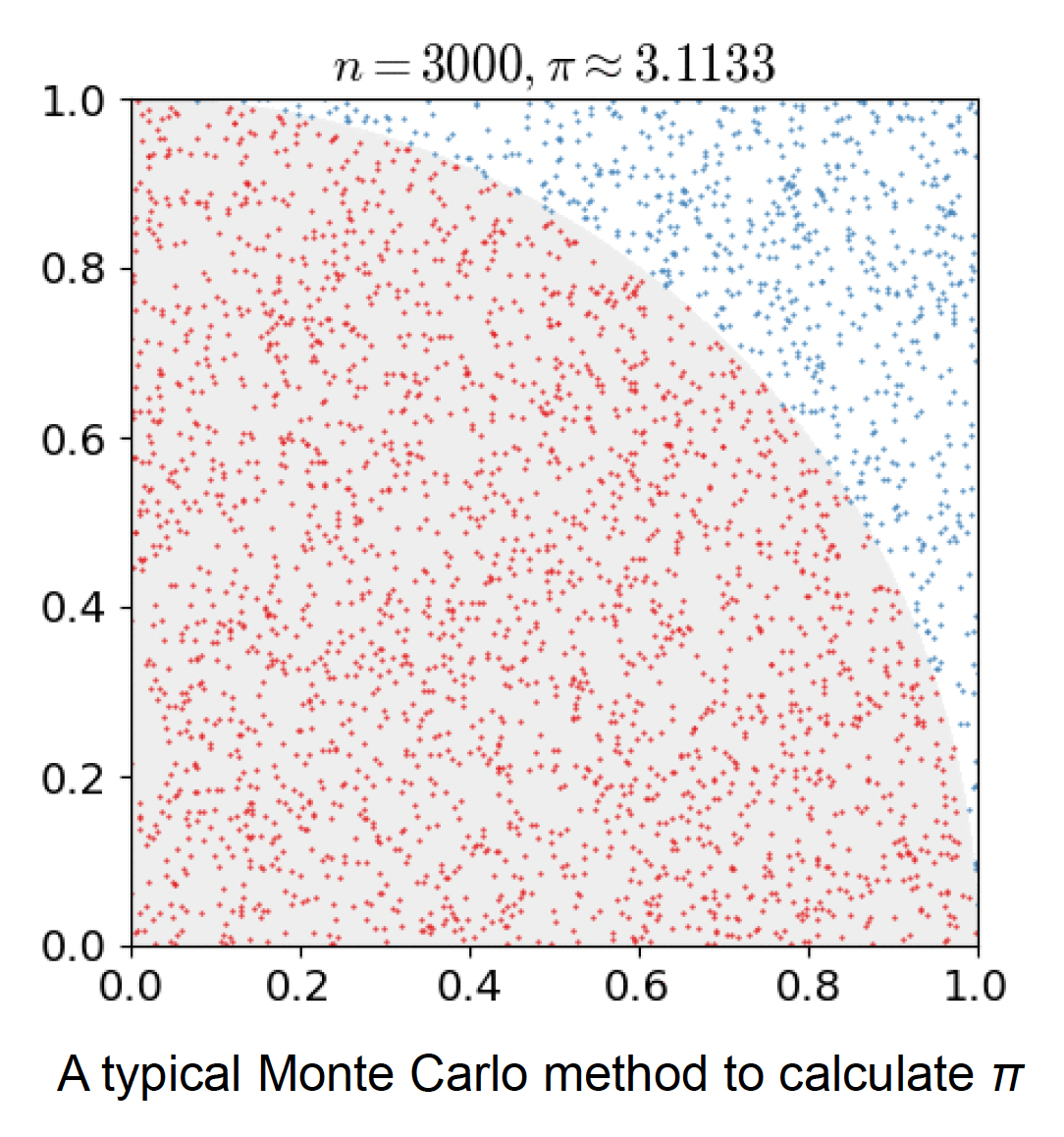
蒙特卡洛方法(Monte Carlo method) 是一类依赖重复随机抽样(repeated random sampling) 以获得数值结果的计算算法。
美国物理学家费米研究核物理时就用到了蒙特卡洛法。
MCTS 由状态和行动构成。
-
状态:具体来说是游戏的状态,对应树的节点
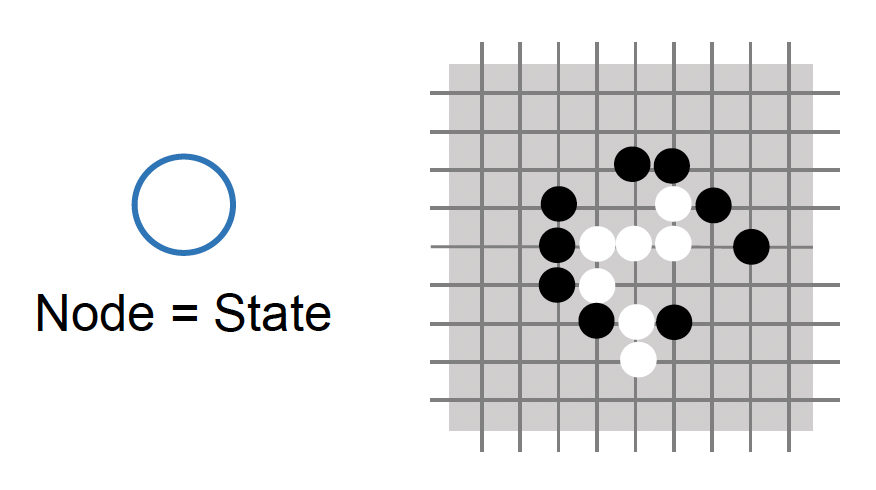
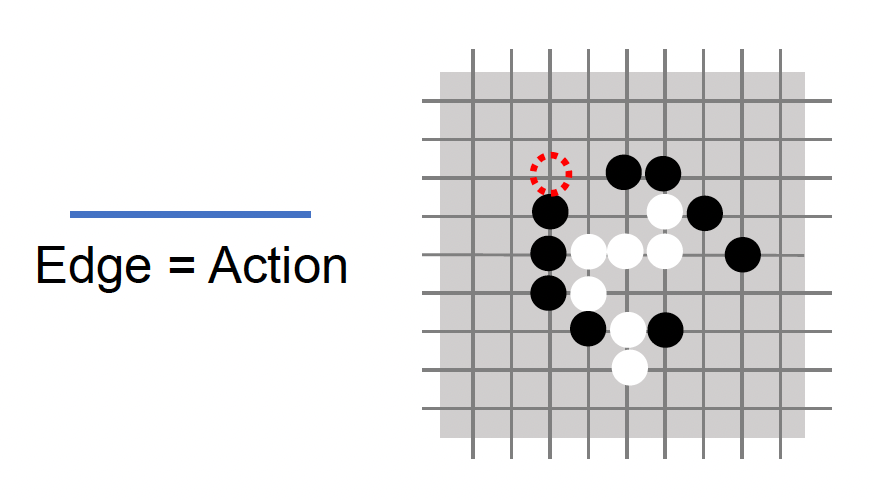
-
行动:表示 AI 的一步操作,对应树的边
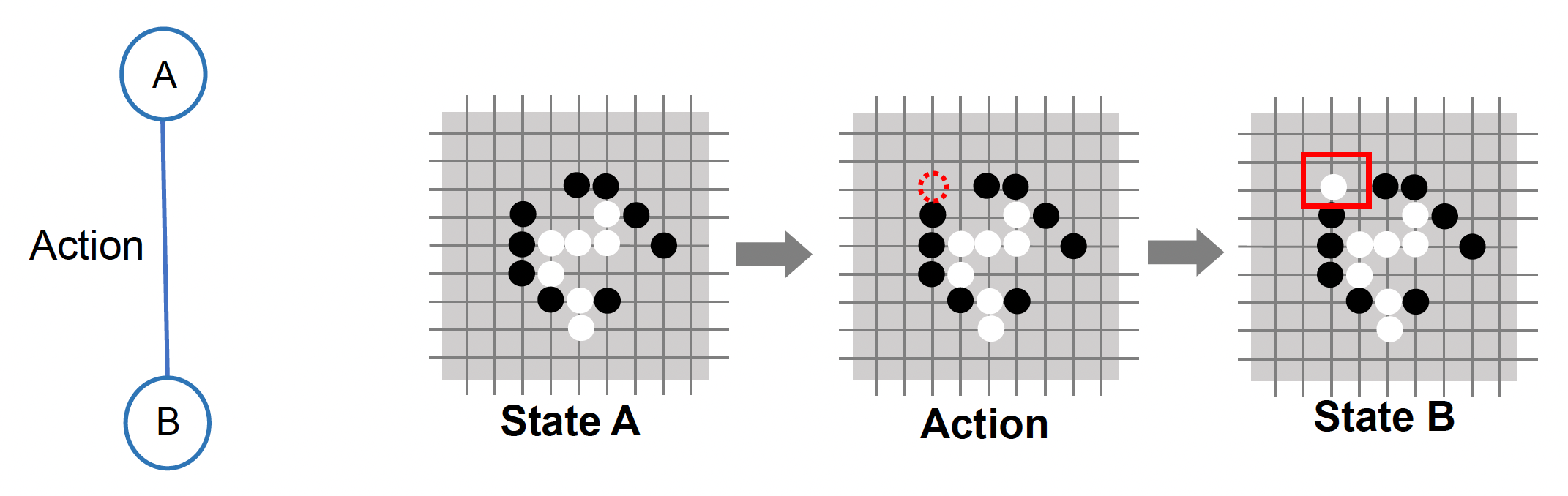
状态转移(state transfer):通过某一行动,从状态 A 转移到状态 B
从当前状态出发,在经过可能的行动序列后可以到达的状态构成的集合被称为(树结构)状态空间(state space)。
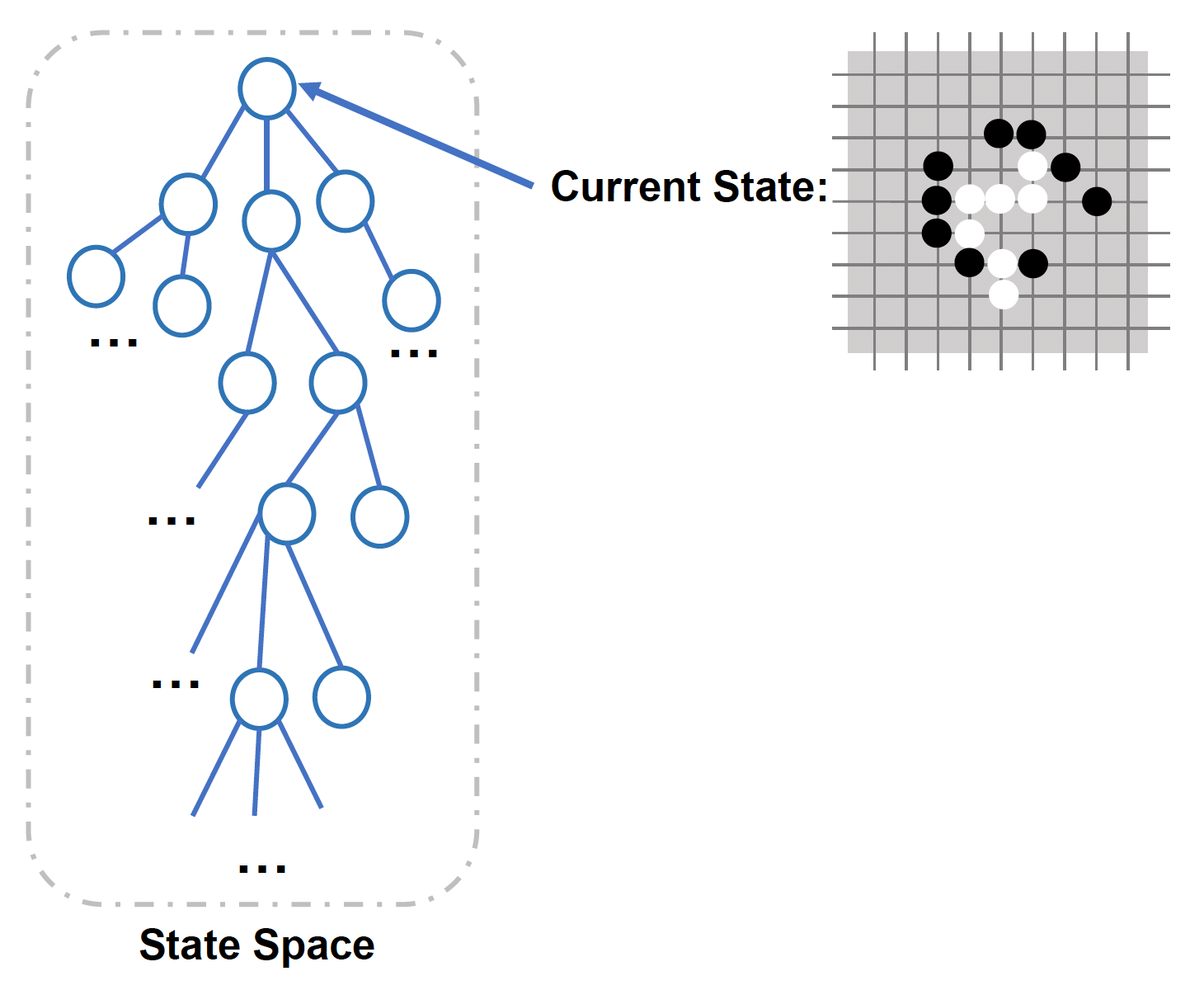
注意:每移动一步就得重新构建状态空间。
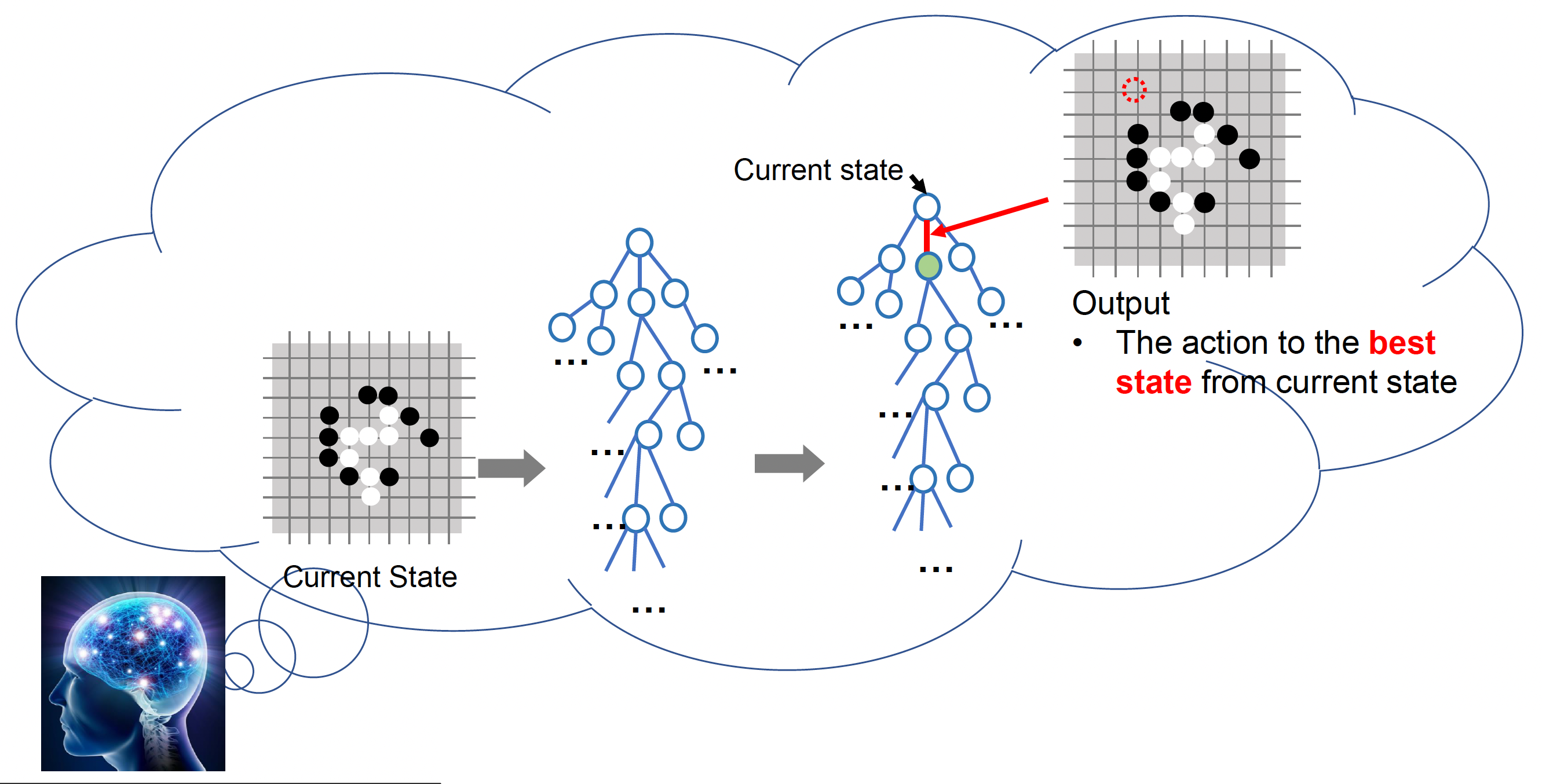
MCTS 的一个重要概念是模拟(simulation),即从状态节点开始,根据默认策略运行,产生结果。
-
以围棋为例,即从(当前)状态开始移动随机步,直到游戏结束,返回值取决于结果(1 为胜利,0 为失败)
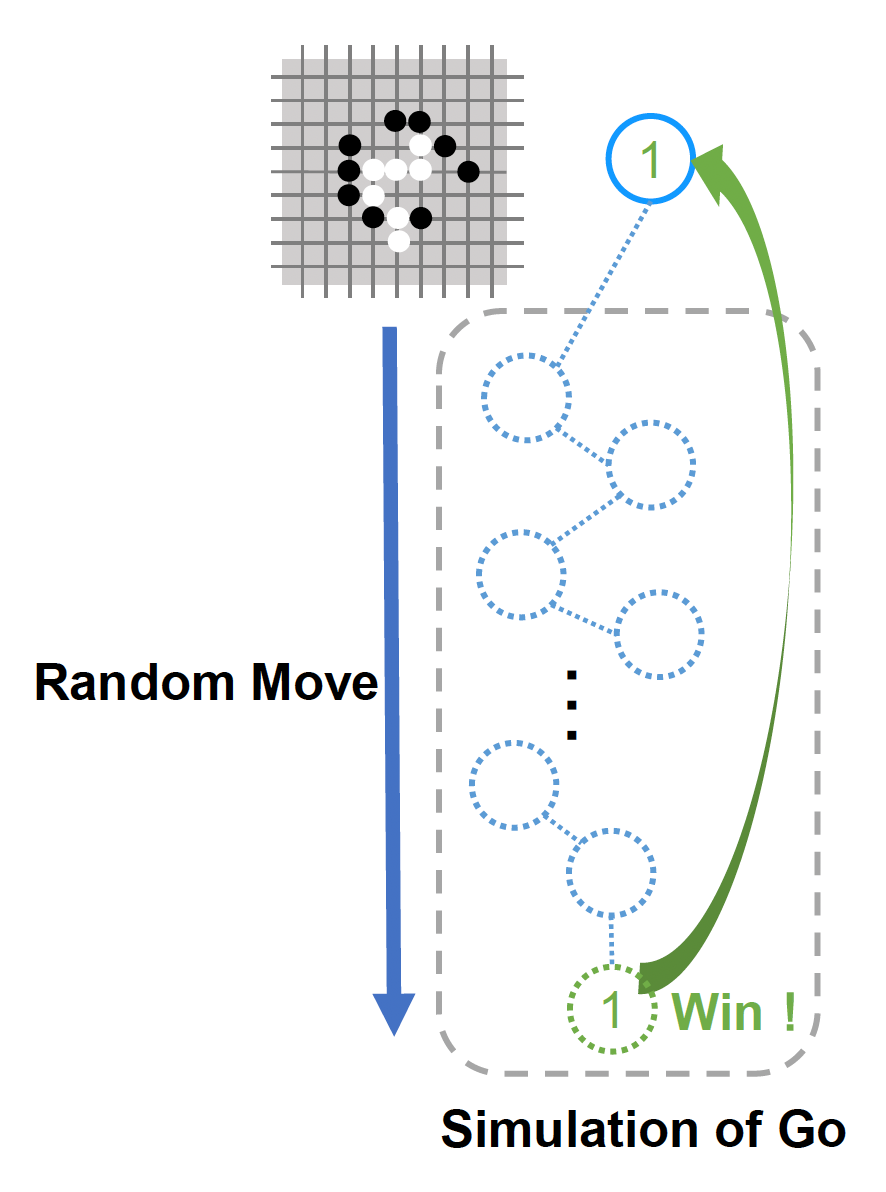
-
默认策略(default policy):用于玩游戏的有用且快速的规则或者神经网络
需要注意的是,即便一次模拟中赢了,也并不代表它能始终获得胜利。要想判断每一步的好坏,我们通过一个评估因子(evaluation factor) Q/N 来衡量。其中 N 表示从当前节点开始模拟的总次数,Q 表示从当前节点开始模拟获胜的次数。
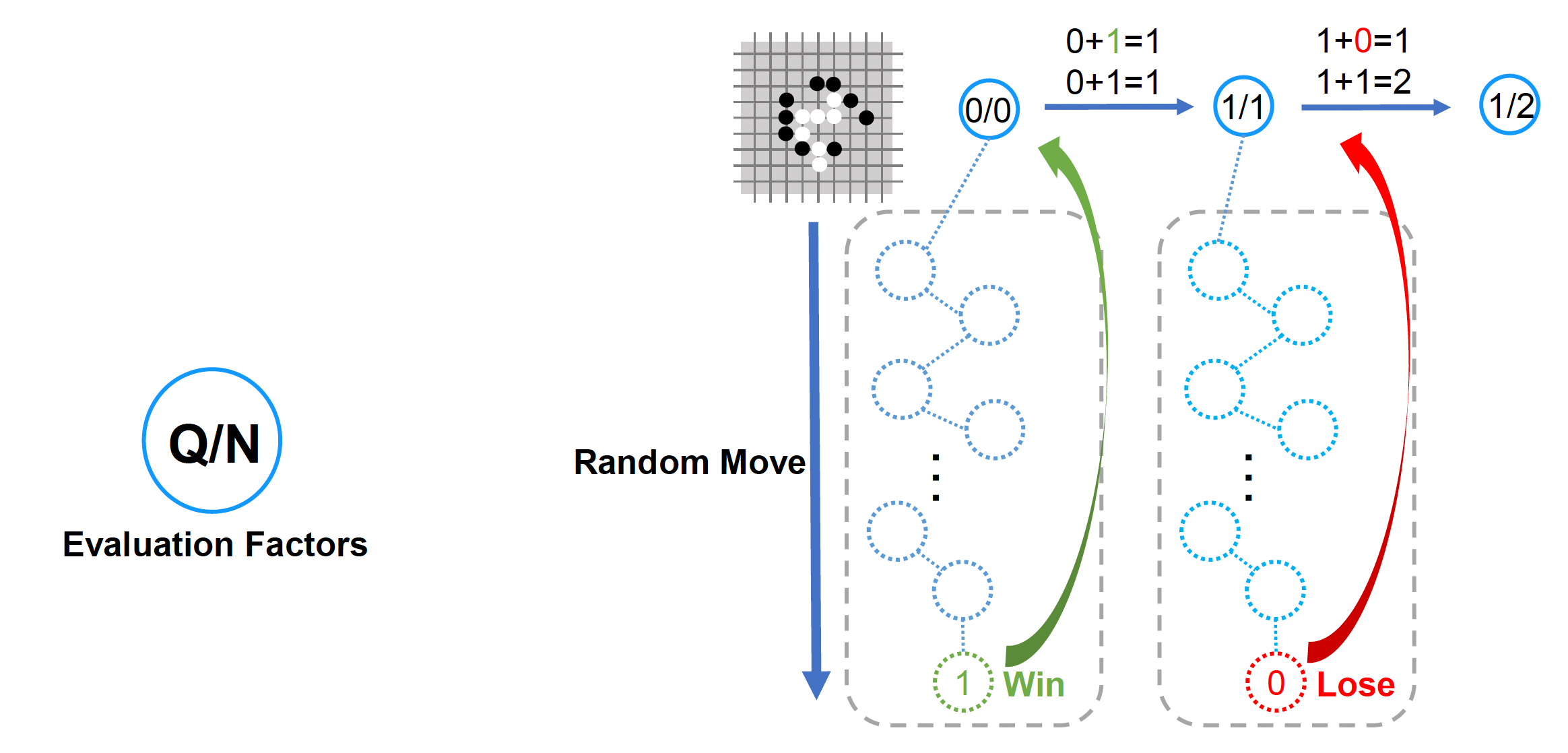
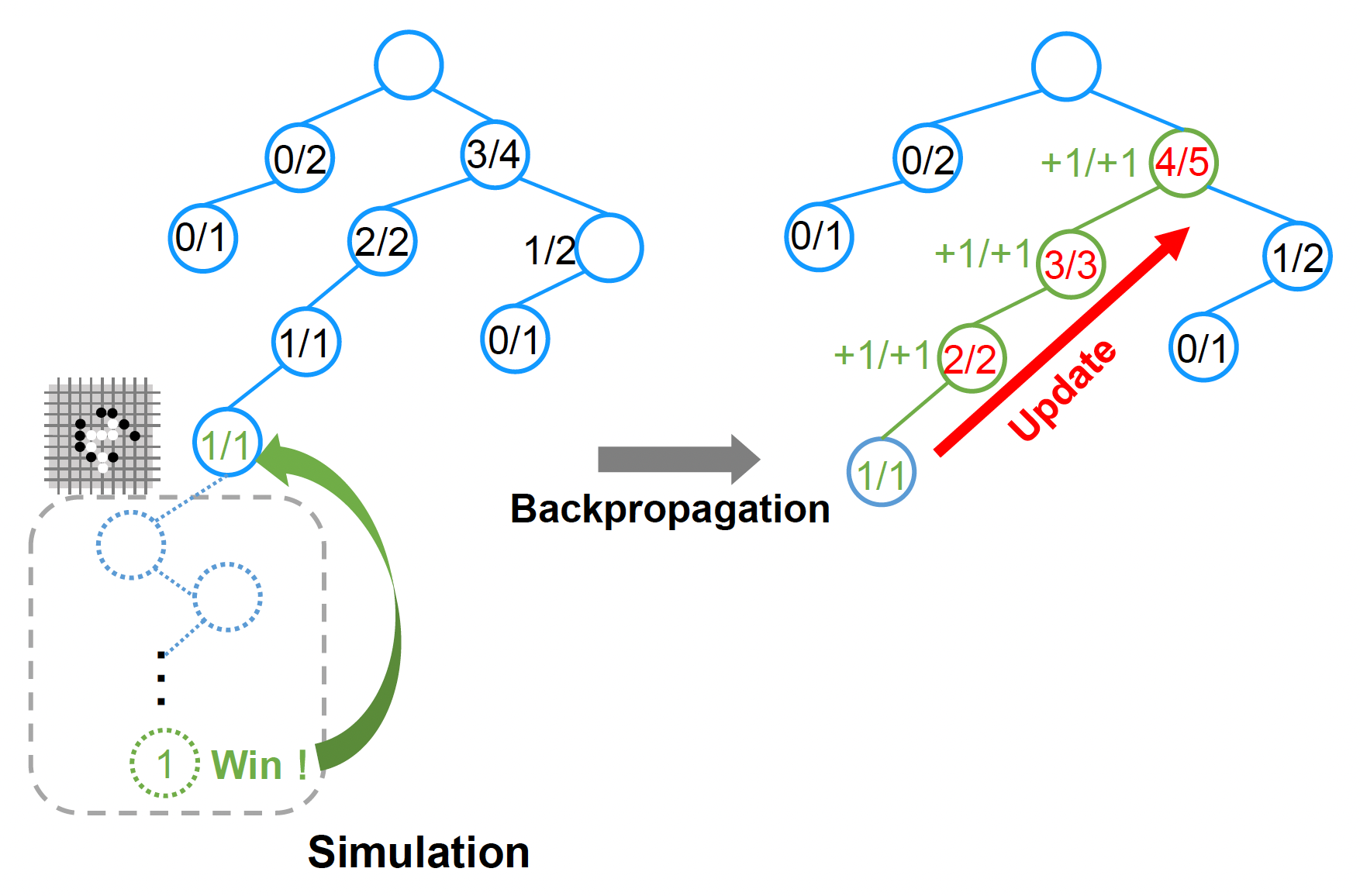
每个节点不仅要修改自己的 Q/N 值,还得向上更新父节点的 Q/N 值。这种将子节点状态的影响传播回父节点状态的操作被称为反向传播(backpropagation)。计算公式为:
Q_FatherNode += Q_BackChildNode++N_node- 重复上述步骤,直到抵达根节点
MCTS 的迭代过程:
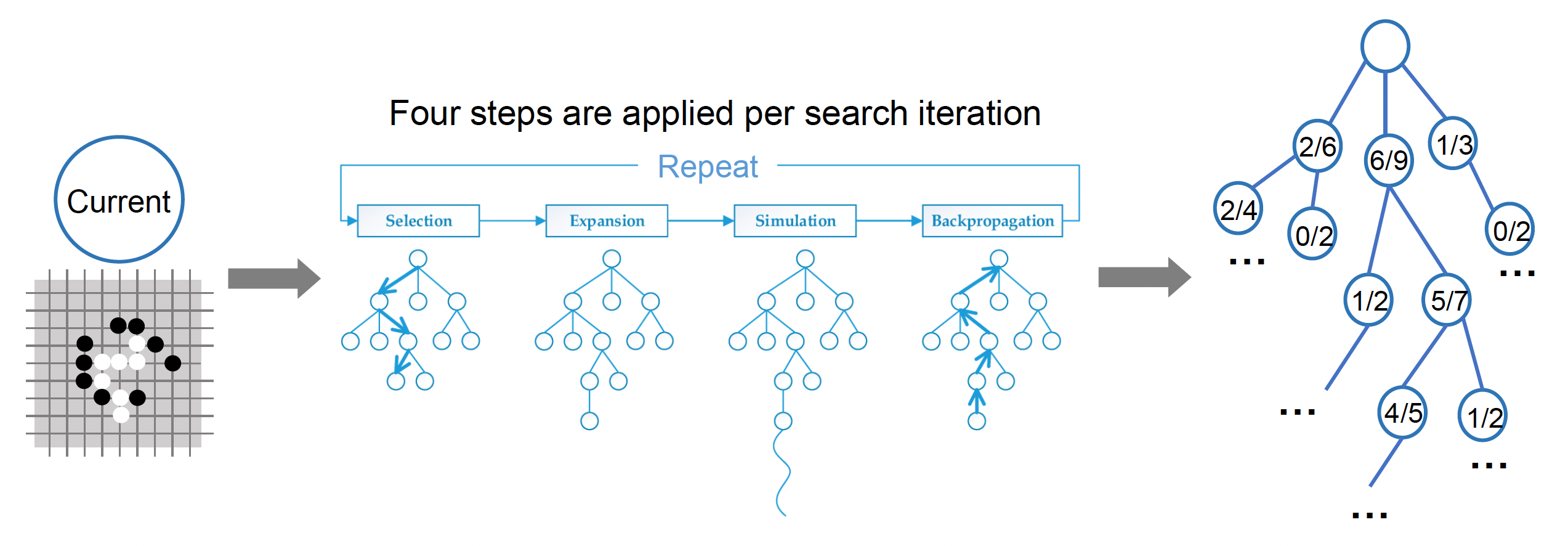
-
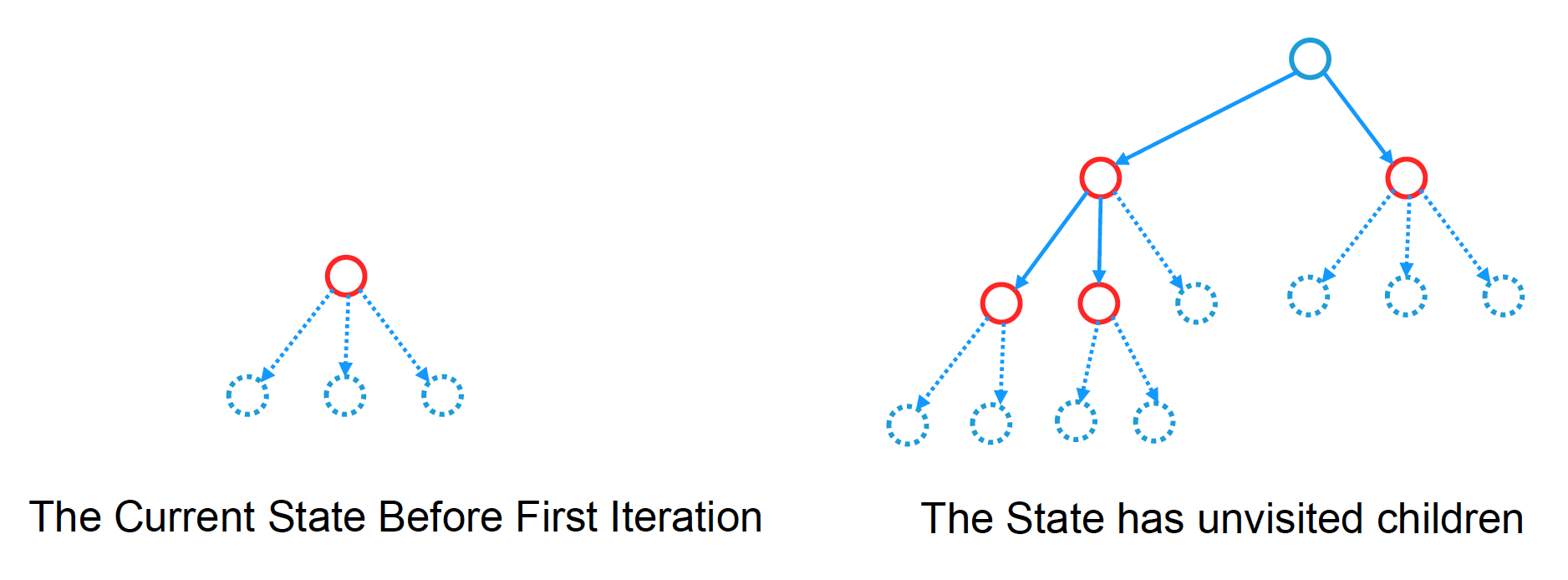
选择:选择最紧急的“可扩展”节点
-
可扩展(expandable)节点——有未被访问的子节点的非终结状态
-
可采取的策略有:
-
开发(exploitation):寻找看似有前景的区域,即选择 Q/N 值更高的节点

-
探索(exploration):寻找尚未充分被采样的区域,即选择访问次数较少的孩子
-
-
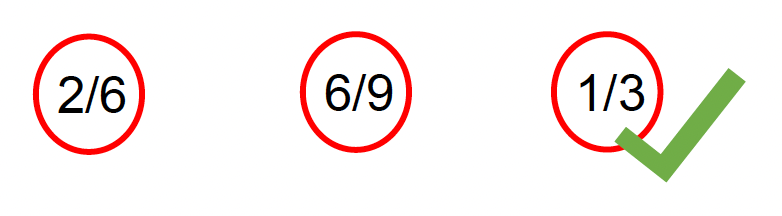
通常采用上置信区间(upper confidence bounds, UCB) 公式来平衡使用开发和探索两种方案
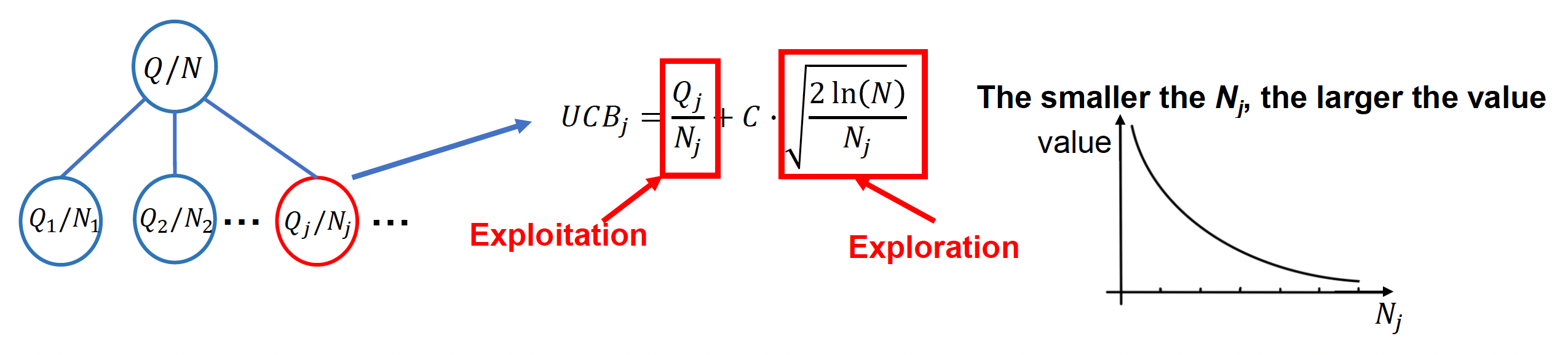
其中:
- \(UCB_j\):节点 \(j\) 的 UCB 值
- \(Q_j\):所有通过节点 \(j\) 的总奖励
- \(N_j\):节点 \(j\) 被访问的次数
- \(N\):节点 \(j\) 的父节点被访问的次数
- \(C\):一个用于调整执行探索次数的常数
-
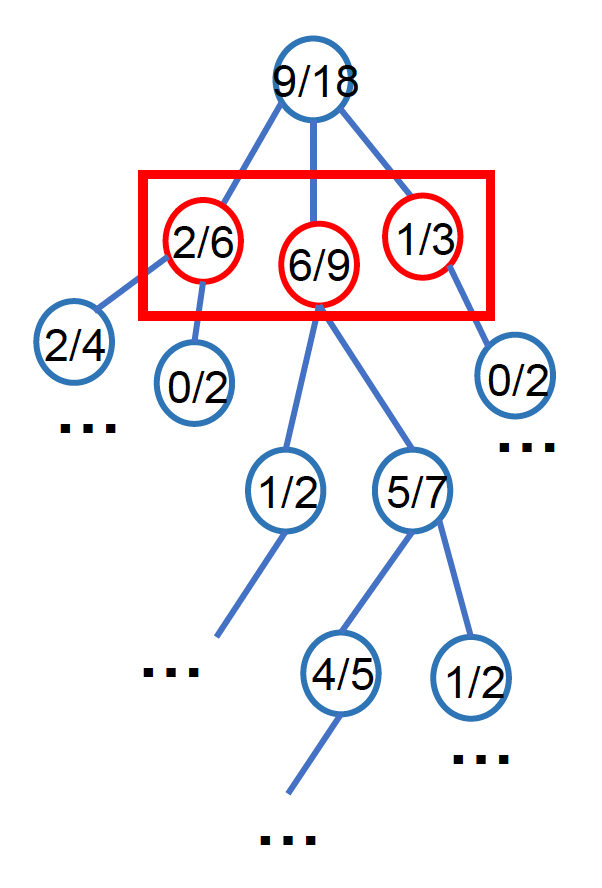
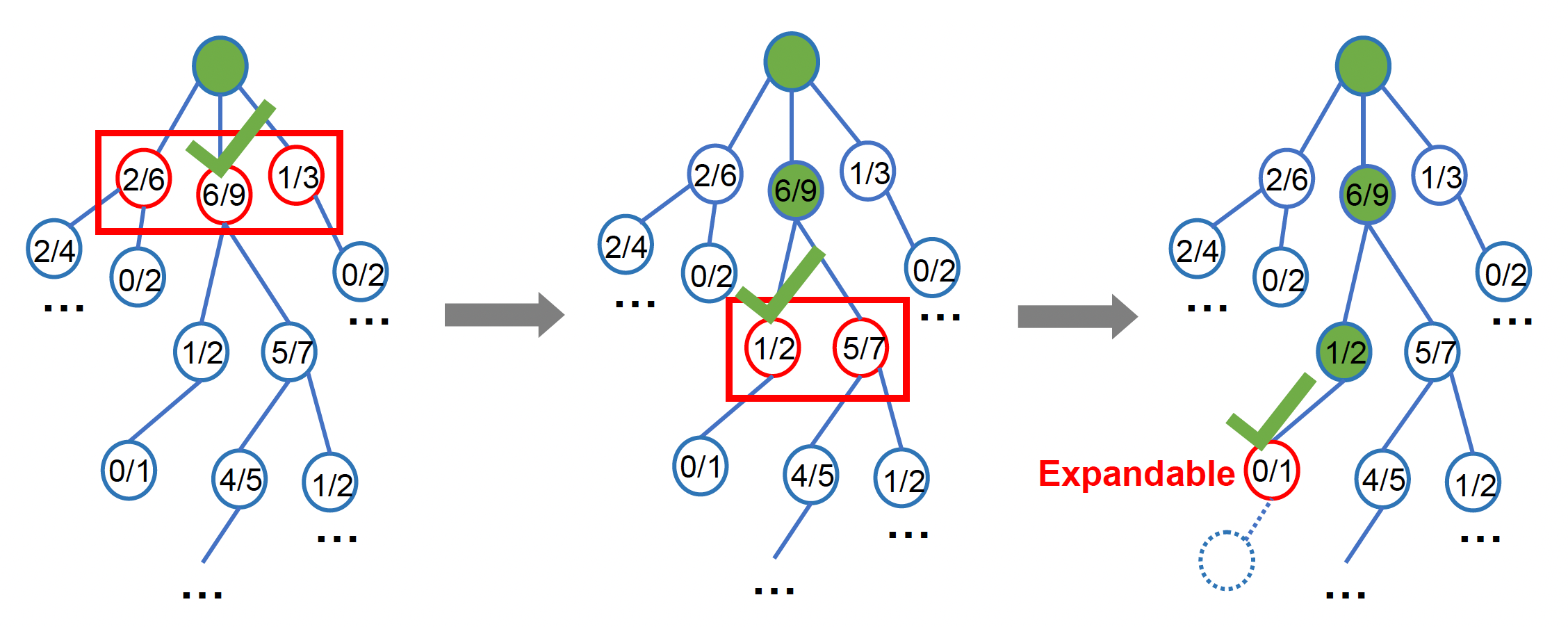
综上,选择步骤可被细分为以下流程:
- 总是从根节点开始搜索
- 找到当前节点的 UCB 值最高的子节点(有前景的子节点)
- 将该子节点作为当前节点
- 重复以上步骤,直到当前节点可扩展,此时选择当前节点
-
-
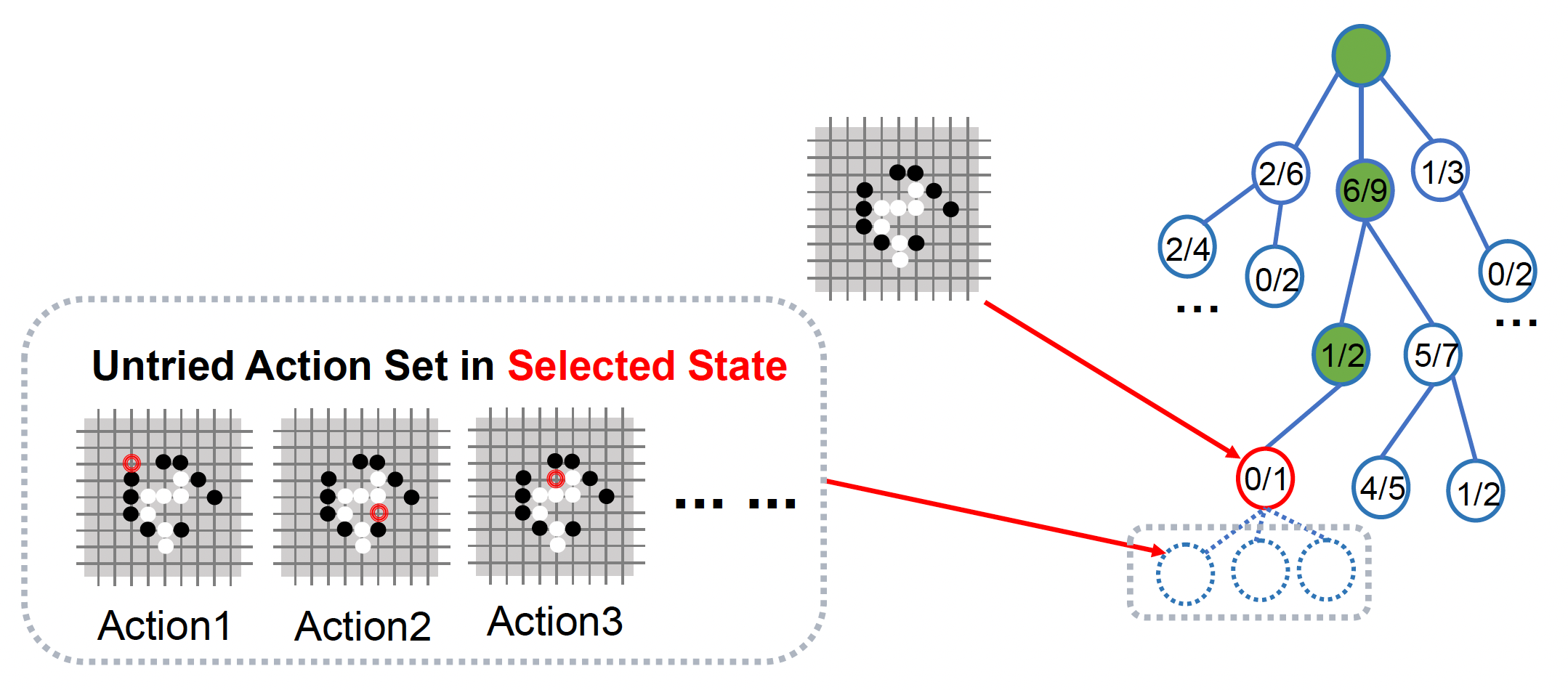
扩展:通过选择一个行动来扩展树
- 根据可采取的行动,为选中节点添加一个或多个子节点
- 子节点值是未知的
-
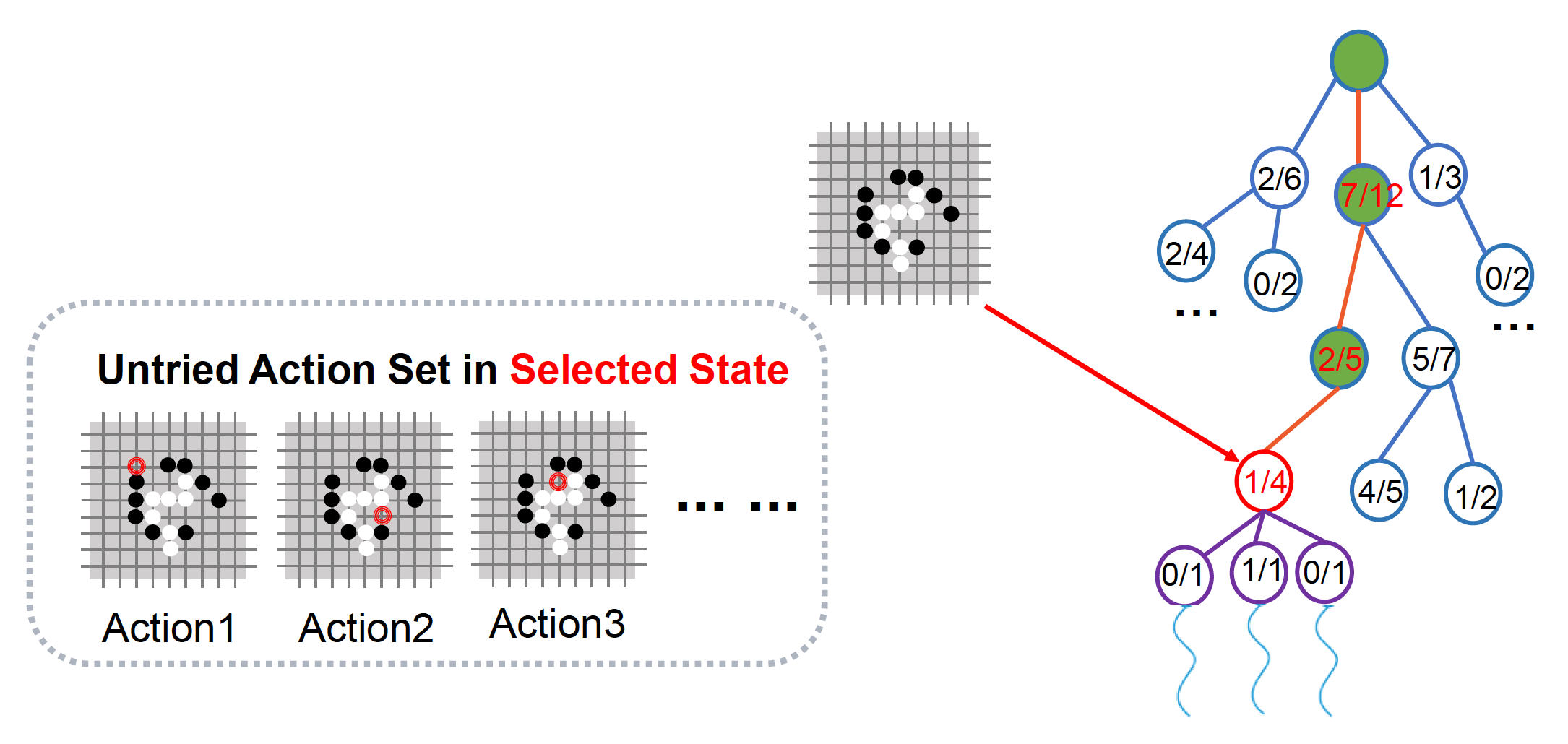
模拟:从新节点处模拟,并产生结果
-
反向传播:将新节点的模拟结果反向传播
结束条件:预先定义计算预算(computational budget),当达到预算时停止探索;计算预算可以是:
- 内存大小(节点数)
- 计算时间
通过上述迭代过程,我们得到一棵完整的树,接下来就在这棵树上进行搜索。为保证每一步为最佳步,即从当前节点处选择最佳的子节点,我们可采取以下策略之一:
- 最大子节点(max child):选择 Q 值最大的子节点
- 鲁棒子节点(robust child):选择访问次数最多的子节点
- 最大鲁棒子节点(max-robust child):选择具有最高访问次数和最高奖励的根子节点;若不存在这样的节点,则继续搜索,直到满足一个可接受的访问次数
-
安全子节点(secure child):选择最大化下置信区间(LCB)的子节点
\[ LCB_j = \dfrac{Q_j}{N_j} - C \cdot \sqrt{\dfrac{2 \ln (N)}{N_j}} \]
优点
- 采用 MCTS 的智能体表现更加多样化
- 智能体完全靠自己决策
- 能够在很大的搜索空间上解决问题
缺点
对多数实时游戏而言很难设计行动和状态,以及建模。
Machine Learning Basic⚓︎
机器学习(machine learning) 可大致分为以下几类:
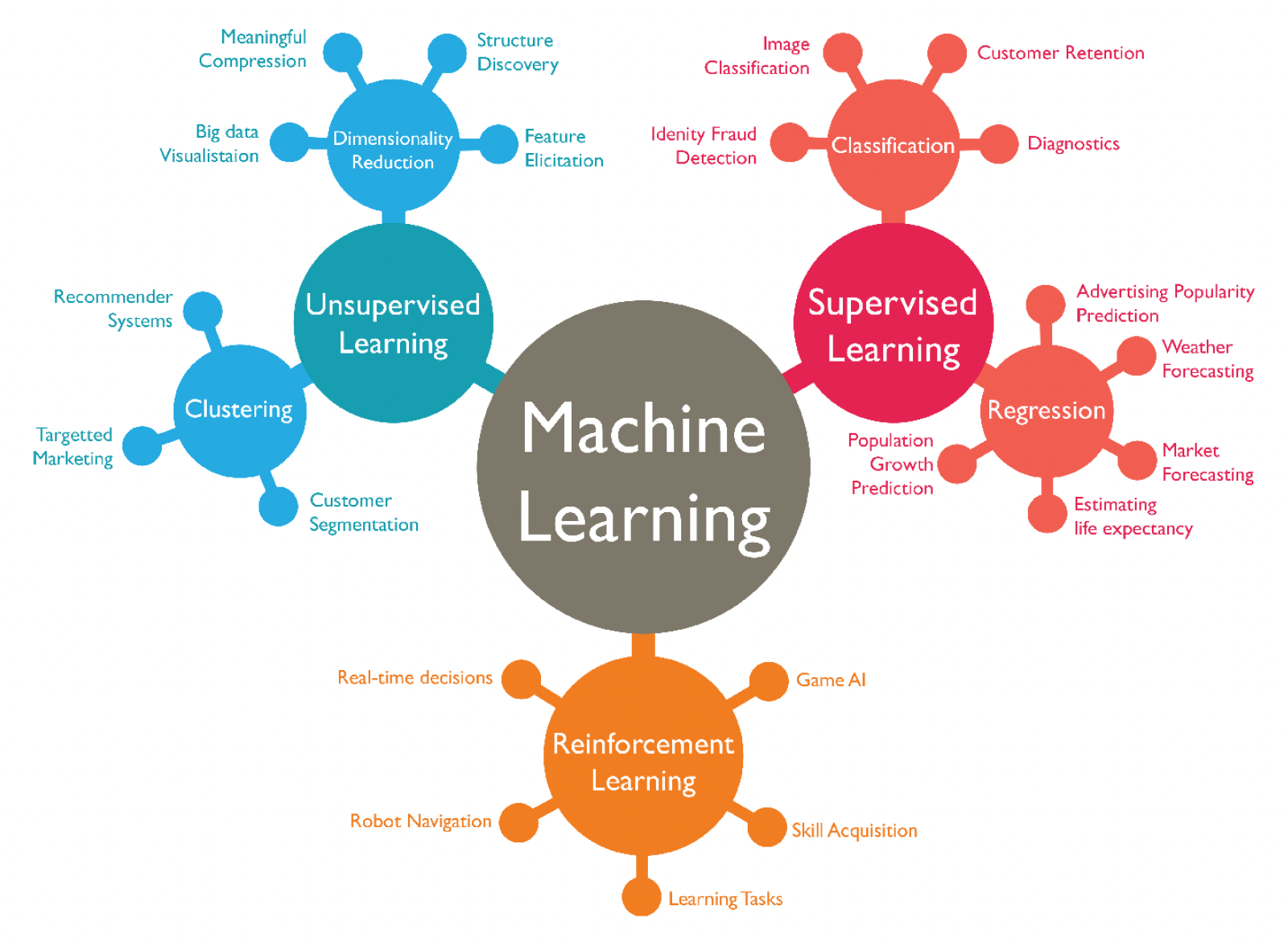
-
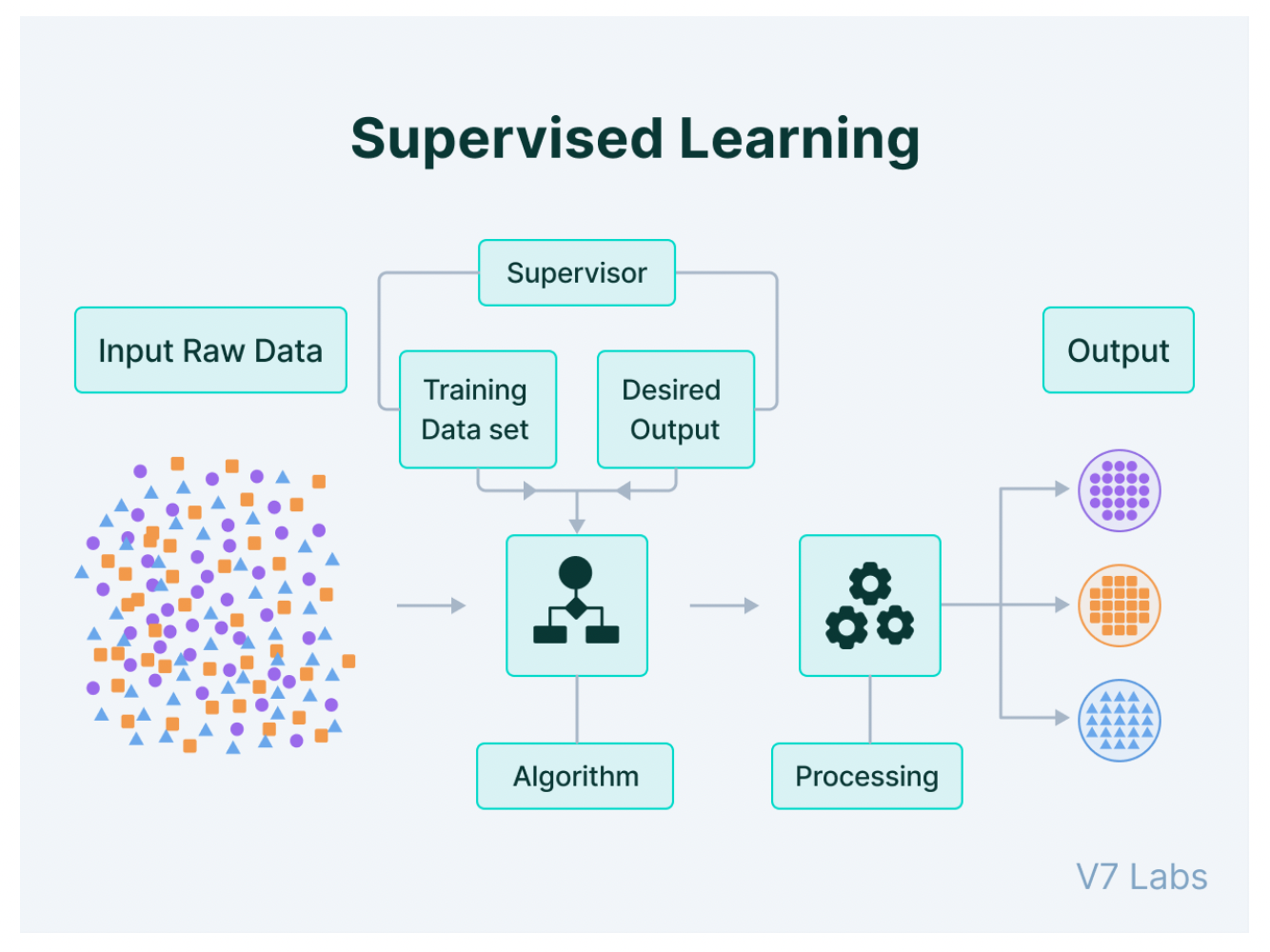
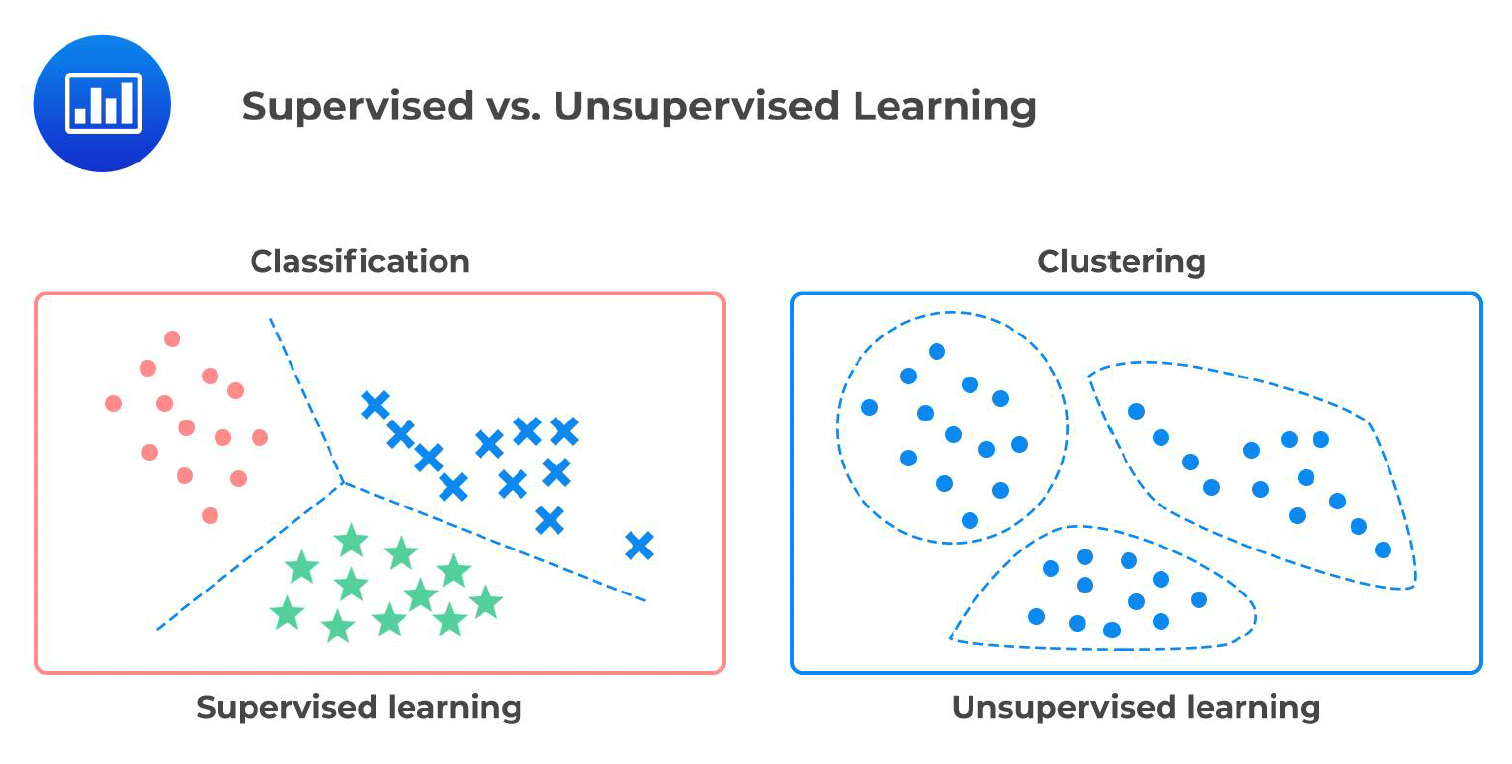
监督学习(supervised learning):从标注数据 (labeled data) 中学习
-
无监督学习(unsupervised learning):从未标注数据 (unlabeled data) 中学习
-
半监督学习(semi-supervised learning):从大量未标注数据和少量标注数据中学习
-
强化学习(reinforcement learning, RL):从与环境互动的过程中学习
主:和游戏引擎关系更紧密的是强化学习,所以下面仅展开介绍这一类机器学习方法。
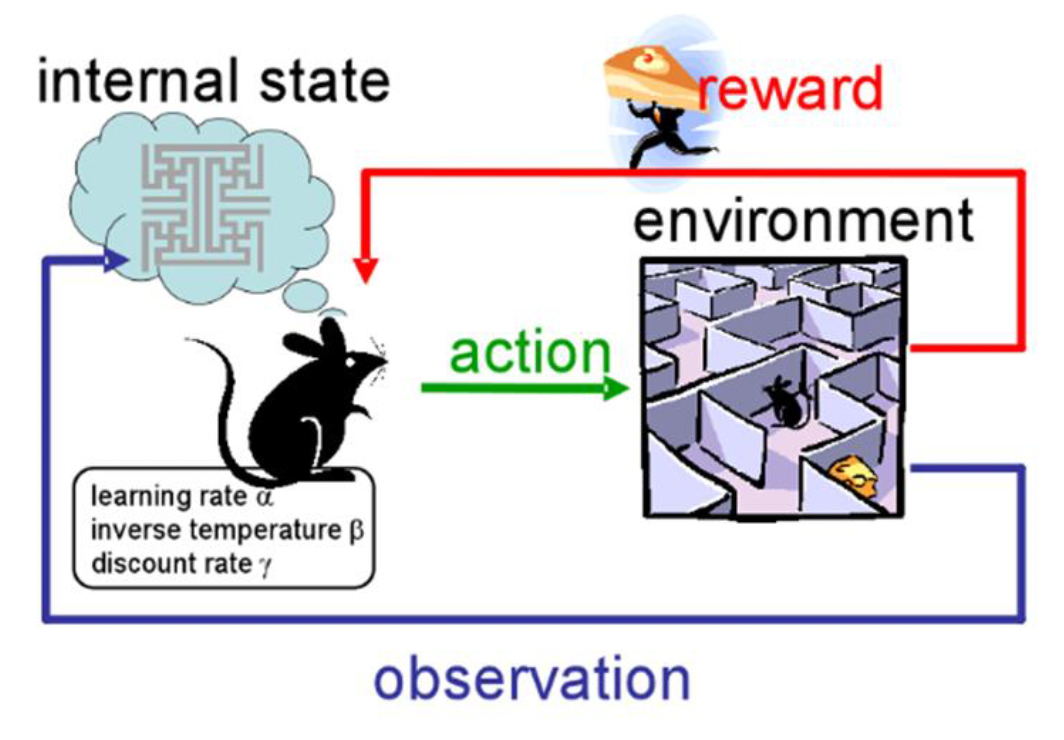
强化学习关注智能体在环境中如何采取行动以最大化累积奖励。
- 试错搜索(trial-and-error search):学习者必须通过尝试来发现什么行动能带来最大奖励
- 延迟奖励(delayed reward):行为可能影响即时奖励、下一个情境以及所有后续的奖励
这里就设计到一个重要概念——马尔科夫决策过程(Markov decision process, MDP)。它的基本元素包括:
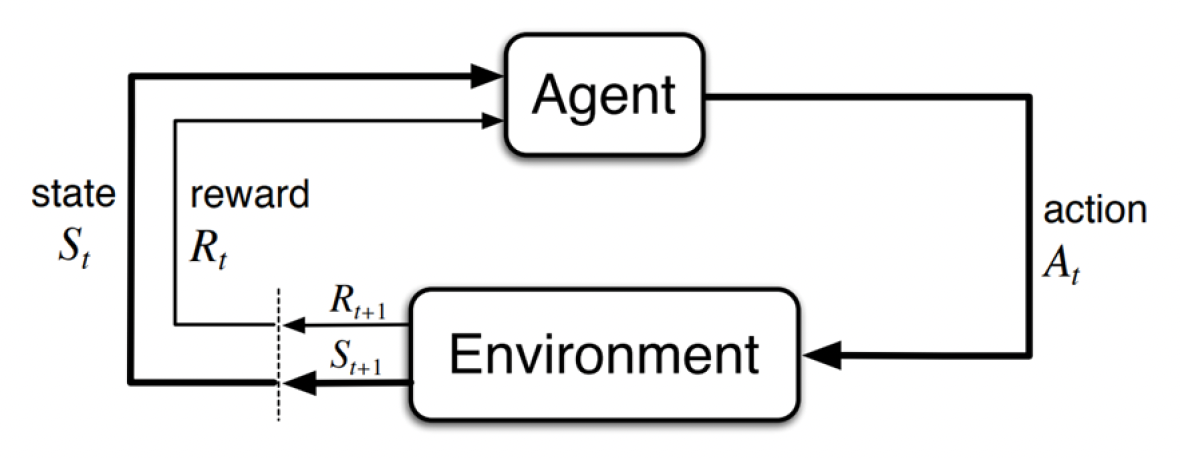
- 智能体(agent):学习者 & 决策制定者
- 环境(environment):与智能体交互的事物,包括智能体之外的一切东西
-
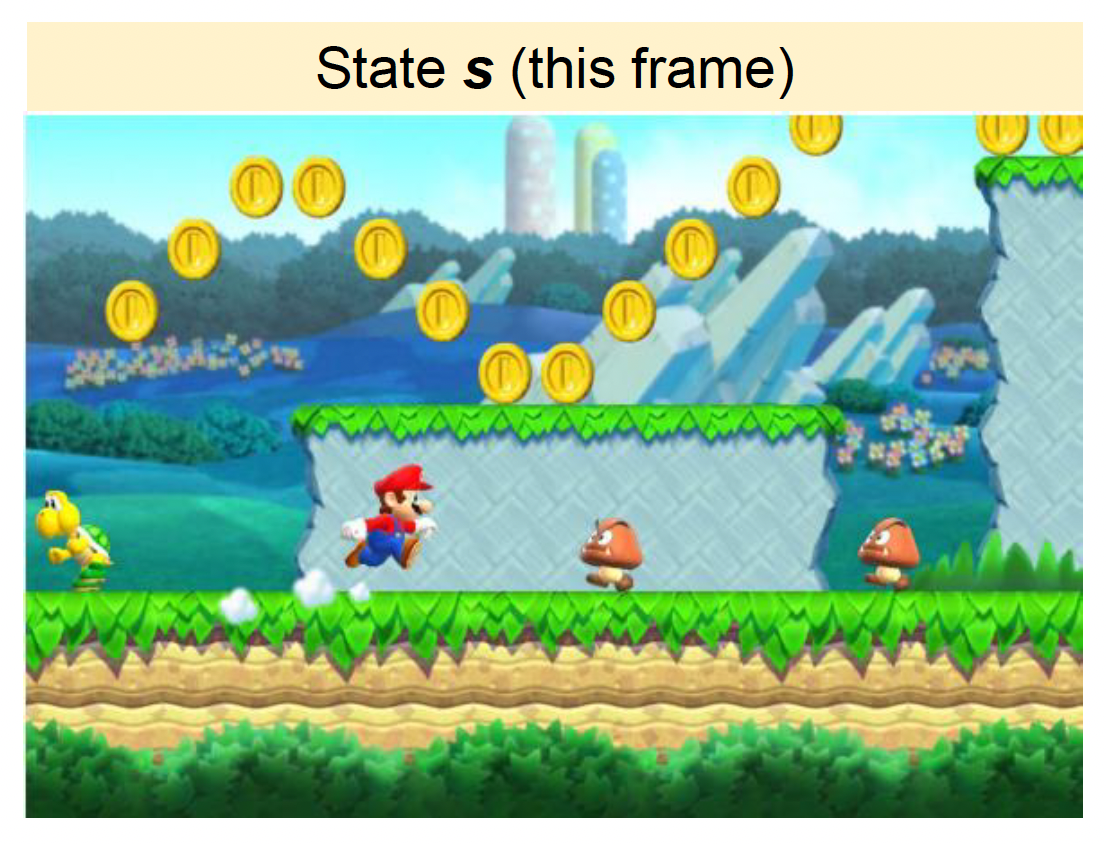
状态(state):智能体的观察,以及人类设计的数据结构
-
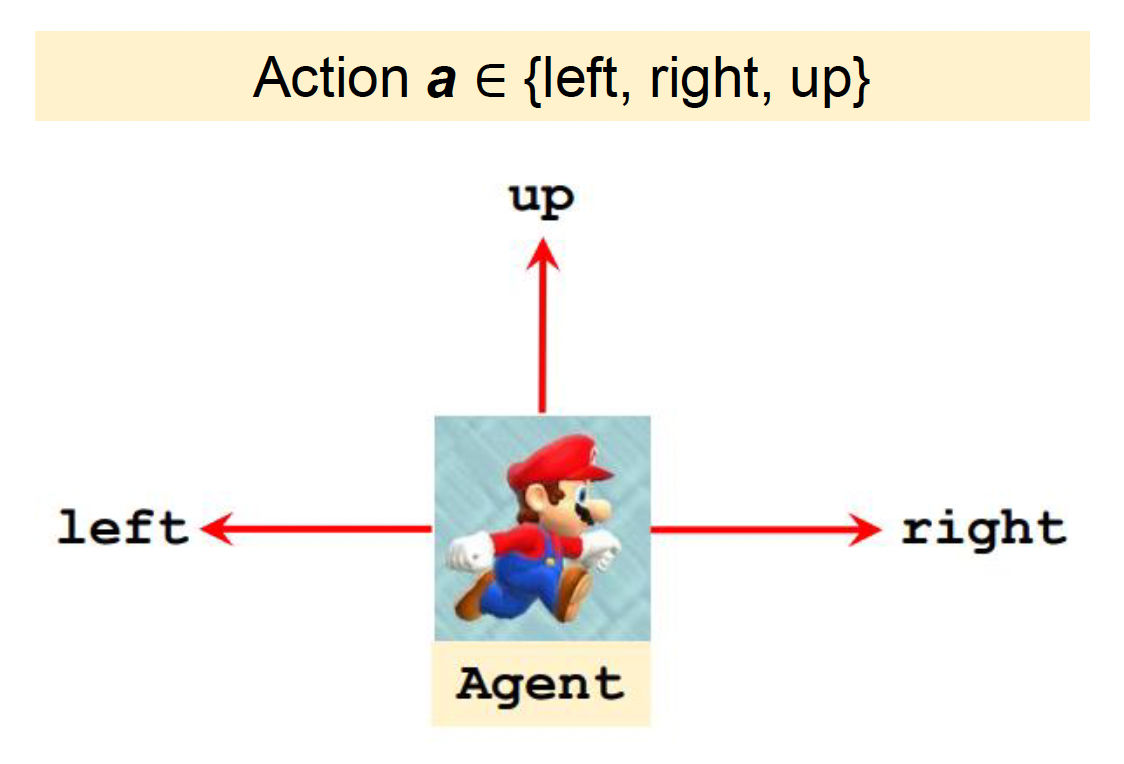
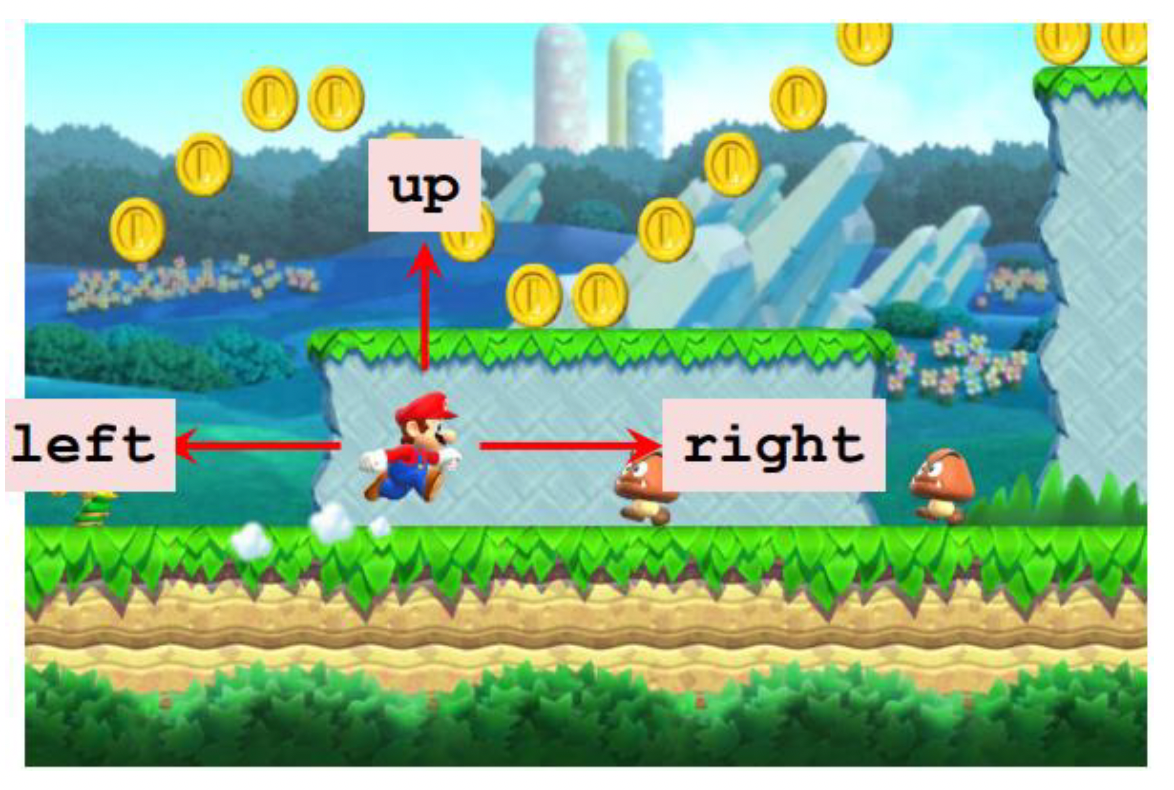
行动(action):智能体表现行为的最小元素,也是由人类设计的
-
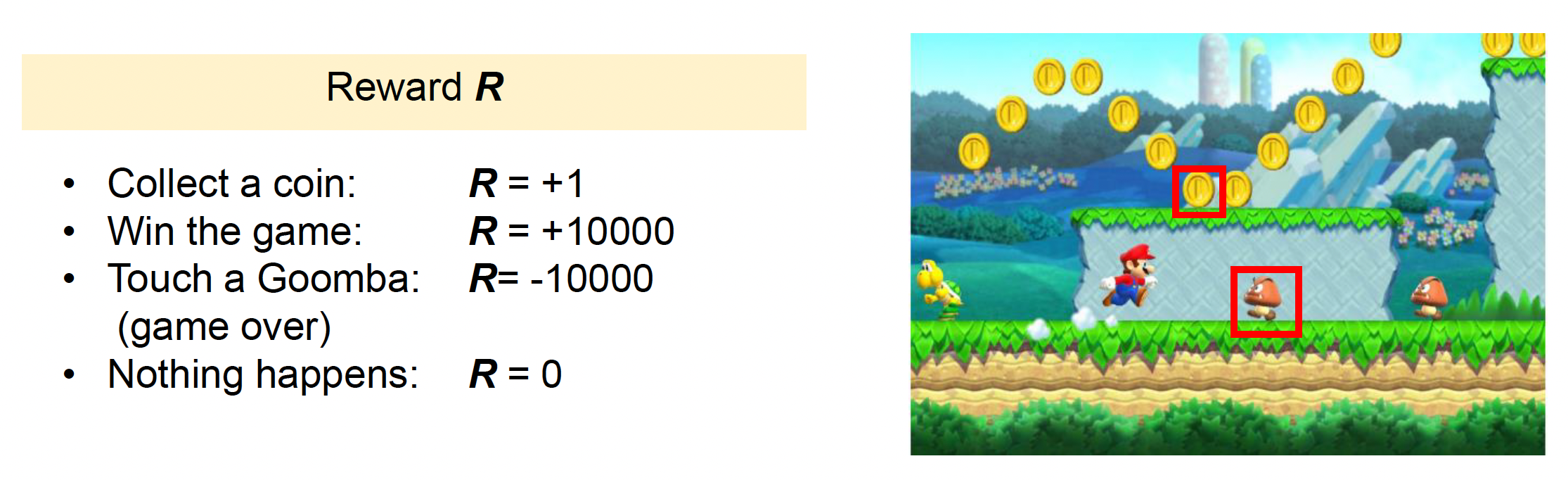
奖励(reward):每个时间步从环境传递给智能体的特殊信号
MDP 的数学模型由以下部分构成:
-
转移概率(transition probability):采取行动 \(a\) 后从 \(s\) 到 \(s'\) 转移的概率
\[ p(s' | s, a) = p(S_t = s' | S_{t-1} = s, A_{t-1} = a) \] -
策略(policy):从状态到选择每个可能行动的概率映射
\[ \pi(a|s) = P(A_t = a | S_t = s) \]- \(\pi(a|s)\) 对应根据状态 \(s\) 采取行动 \(A = a\) 的概率
- 实际上观察到状态 \(S = s\) 时,智能体采取的行动 \(A\) 是随机的
-
例子:\(\pi(\text{left}|s) = 0.2, \pi(\text{right}|s) = 0.1, \pi(\text{up}|s) = 0.7\)
-
总奖励(total reward):长期接收的累积奖励
\[ \begin{aligned} G_t & = R_{t+1} + R_{t+2} + R_{t+3} + \dots + R_T \\ G_t & = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \dots \end{aligned} \]其中第二种计算方式引入系数 \(\gamma (< 1)\),表示越后面的奖励计算越不靠谱,因此对应的系数会越小;一般设置为接近 1 的数值(比如 0.99, 0.98, 0.95 等
) 。
Building Advanced Game AI⚓︎
最后一节会介绍如何利用机器学习技术让游戏中的 AI「更聪明
- 不难发现,之前讲过的所有 AI 方法实际上都需要人类知识来设计,比如计算 GOAP 的成本等等
- 但玩家始终希望 AI 能够应对复杂的游戏世界,并且能够表现得自然且多样
- 传统方法仅在有限空间中计算
- 机器学习可创造无穷可能性
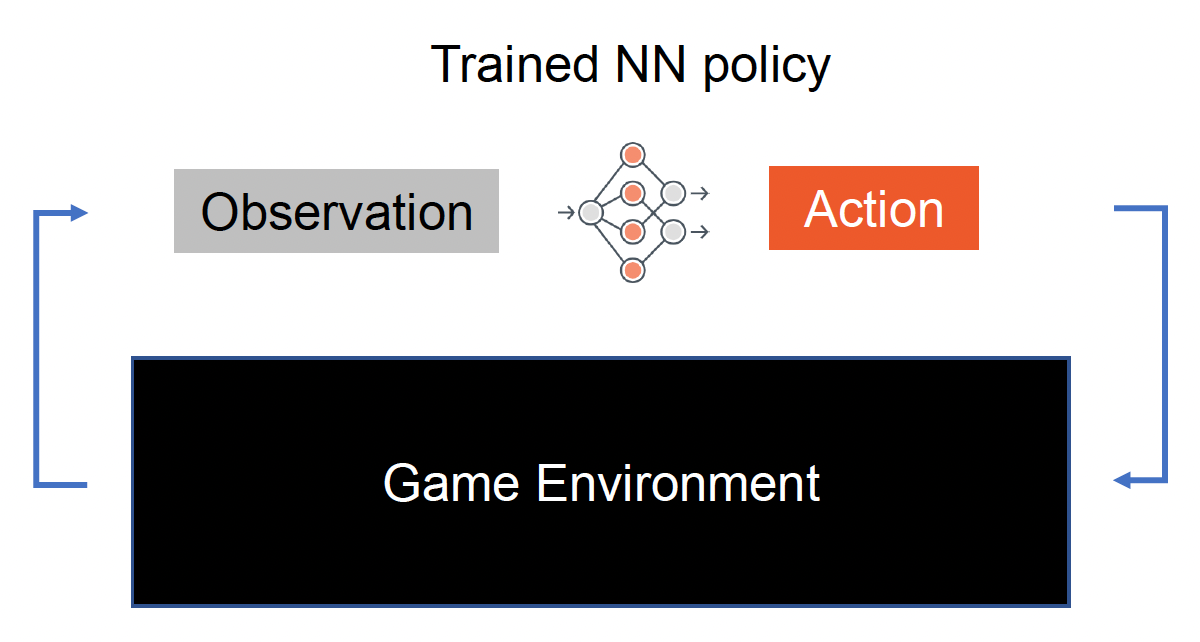
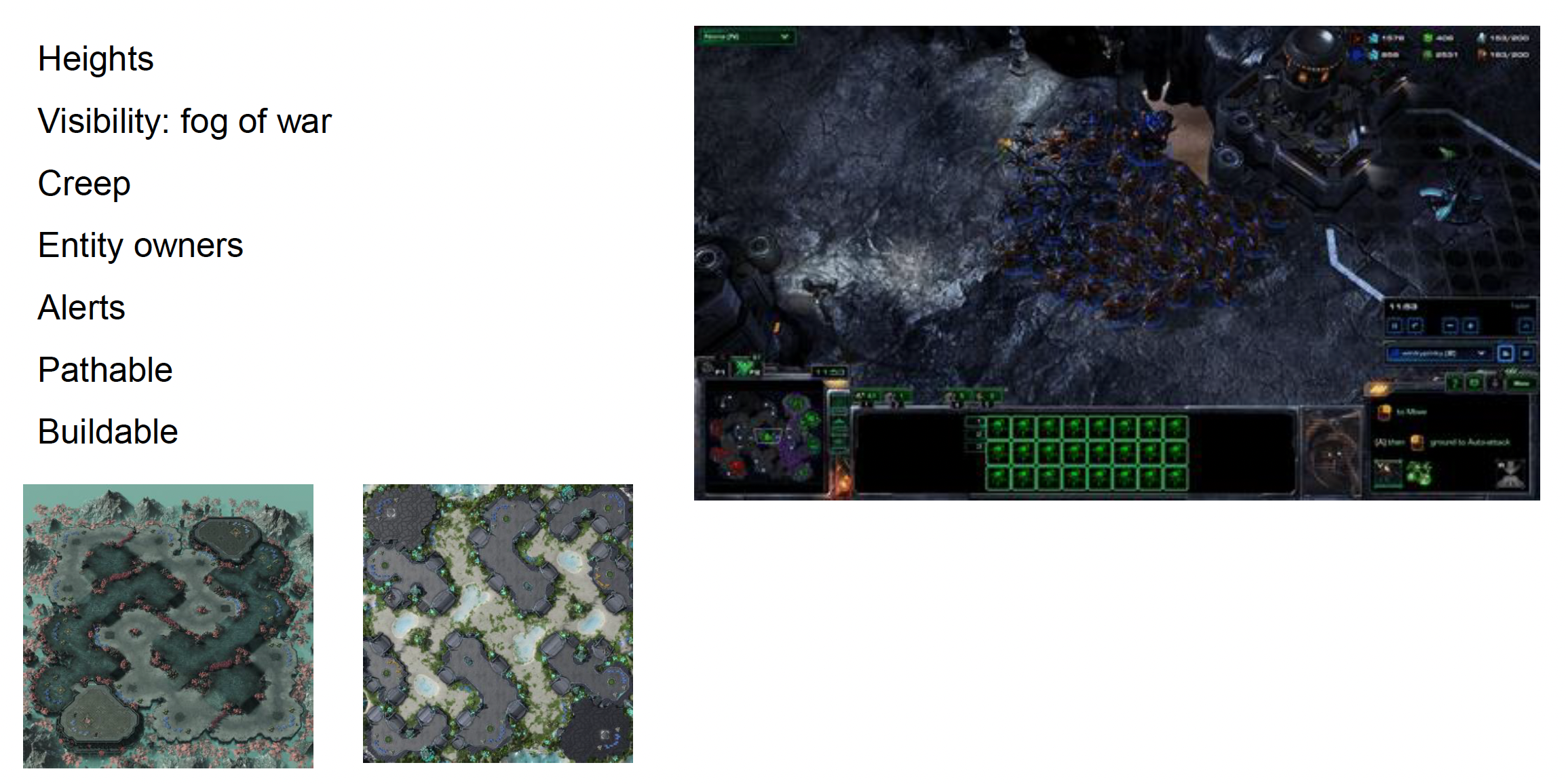
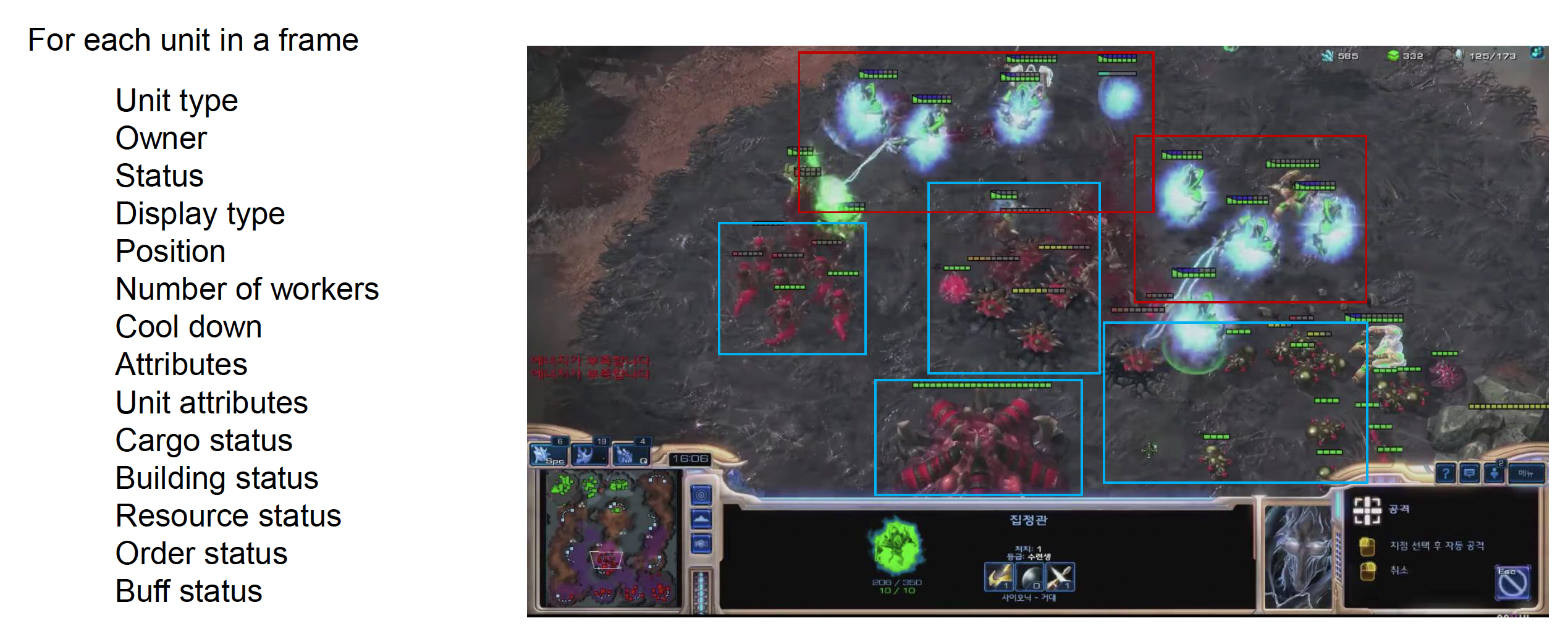
游戏中的机器学习框架的构成如下。其中一个重要的概念是观察(observation),即 AI 观察到的游戏状态,包括:向量特征(单位信息、环境信息 ...
以 DRL(深度强化学习
-
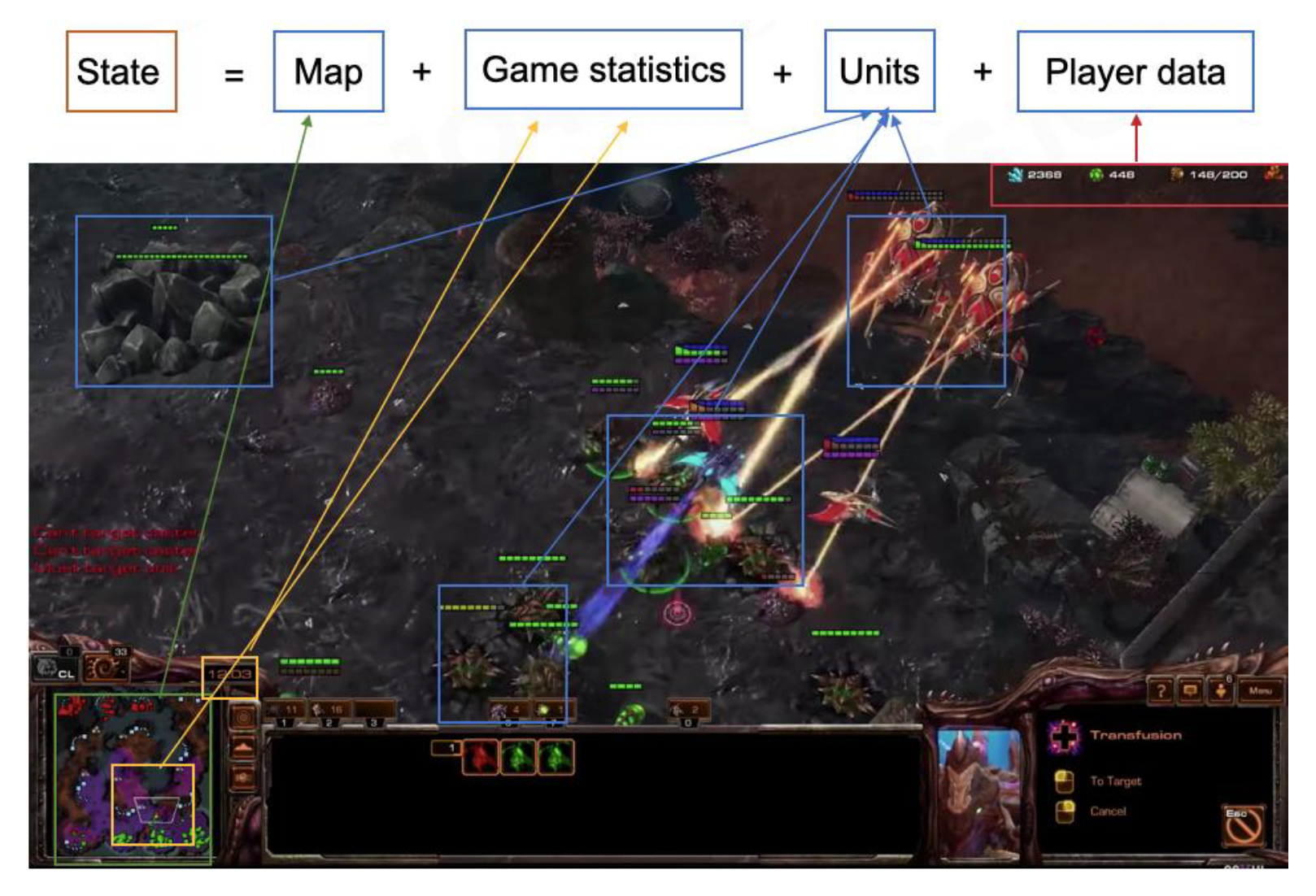
状态
-
地图
-
单位信息
-
-
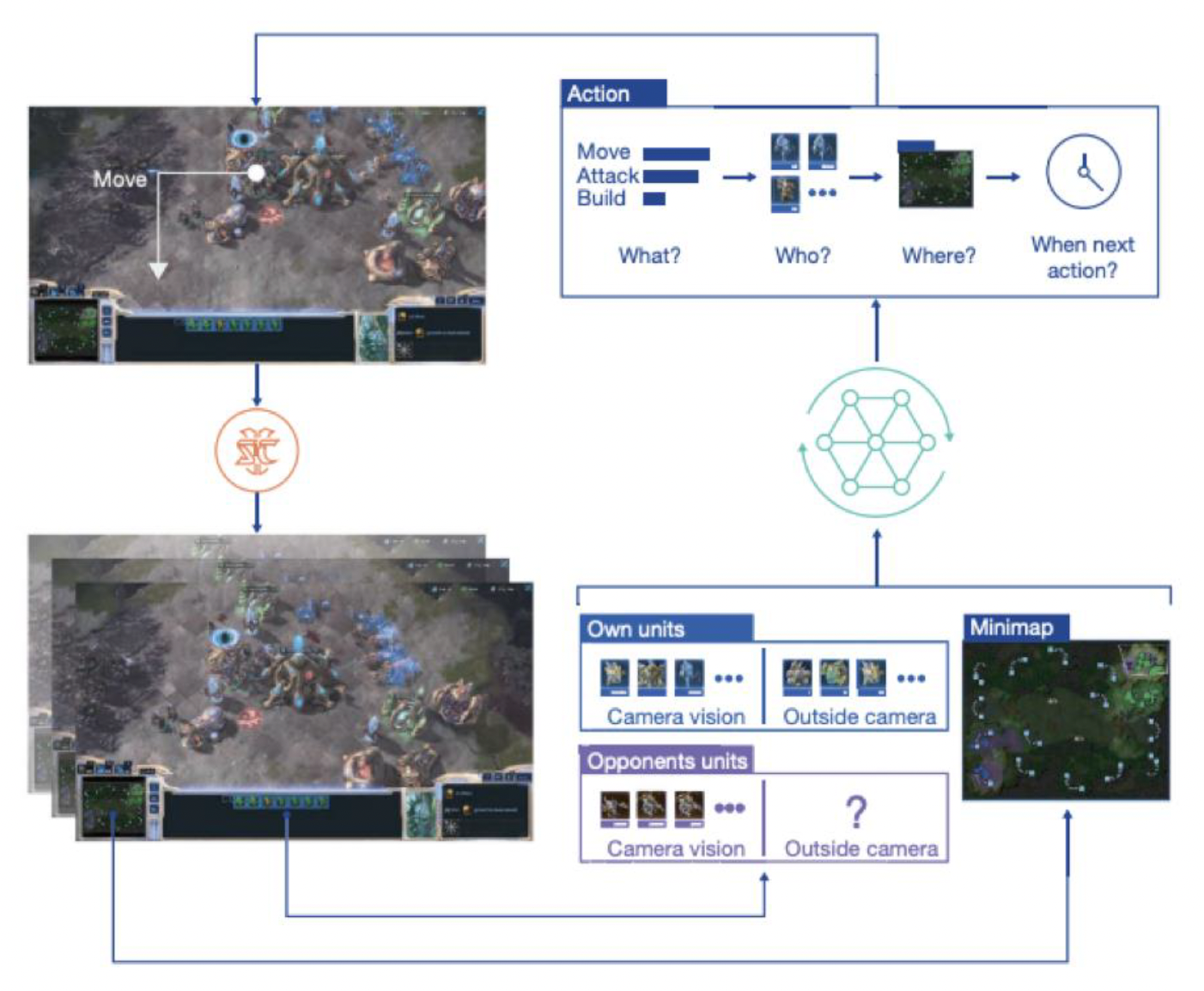
行动
-
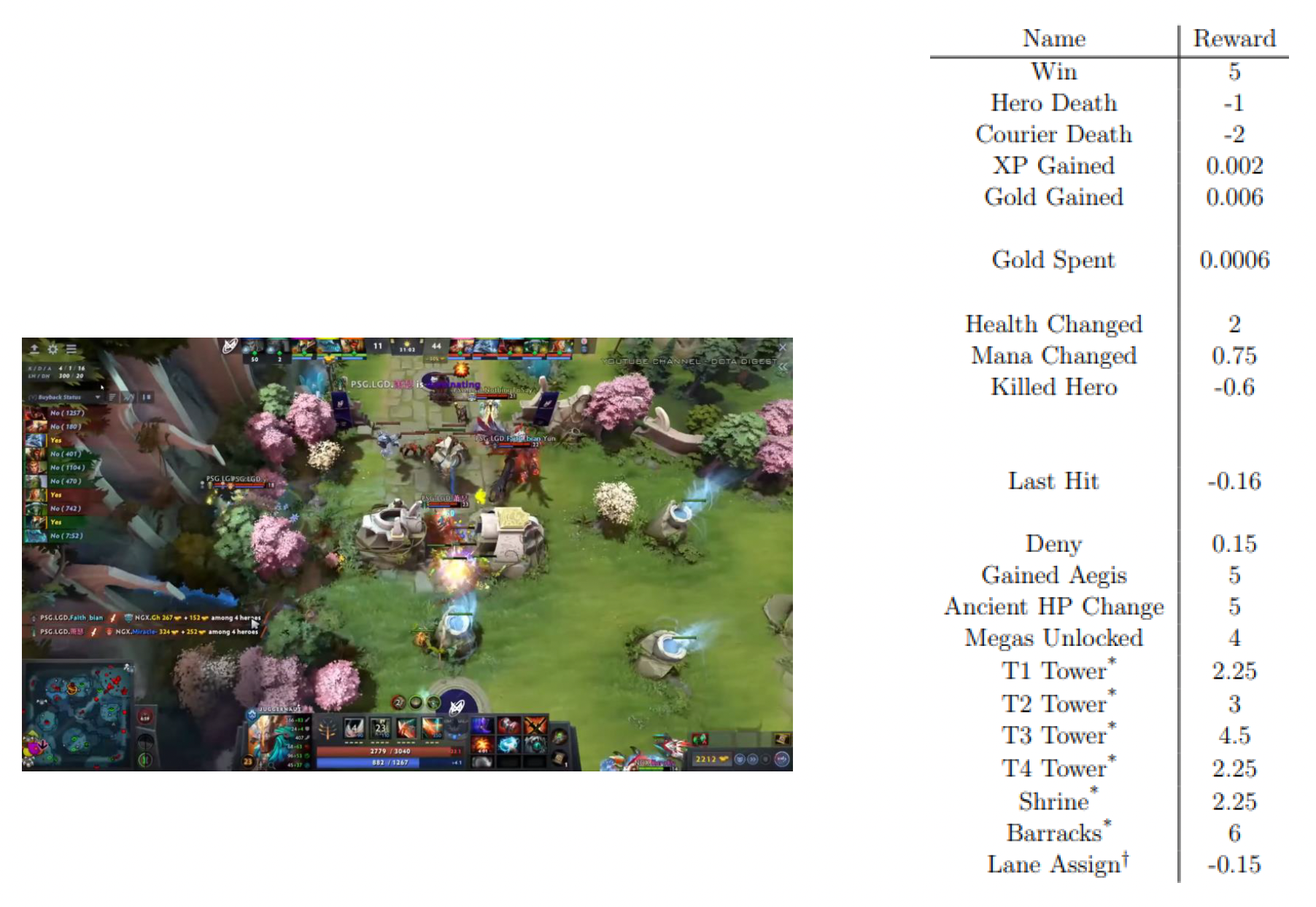
奖励
- 来自游戏的直接奖励:胜利 +1,失败 -1
-
伪奖励输出及批评网络 (critic network)
- 比如智能体操作与人类数据统计 z 的距离
-
不同的奖励设置可以帮助我们训练不同风格的智能体,比如更具侵略性或更保守
-
例子:Dota2 的 OpenAI Five
-
NN Architectrue⚓︎
AlphaStar 的神经网络架构如下:
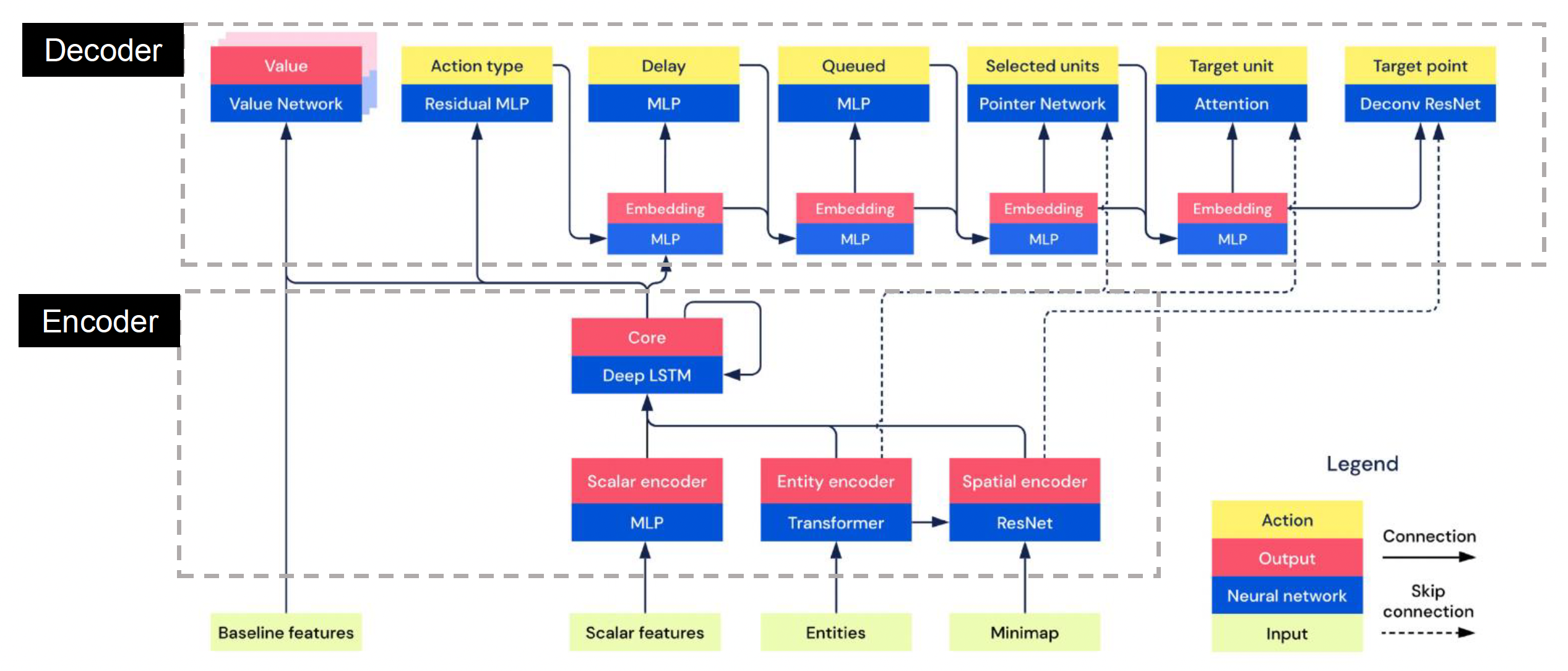
-
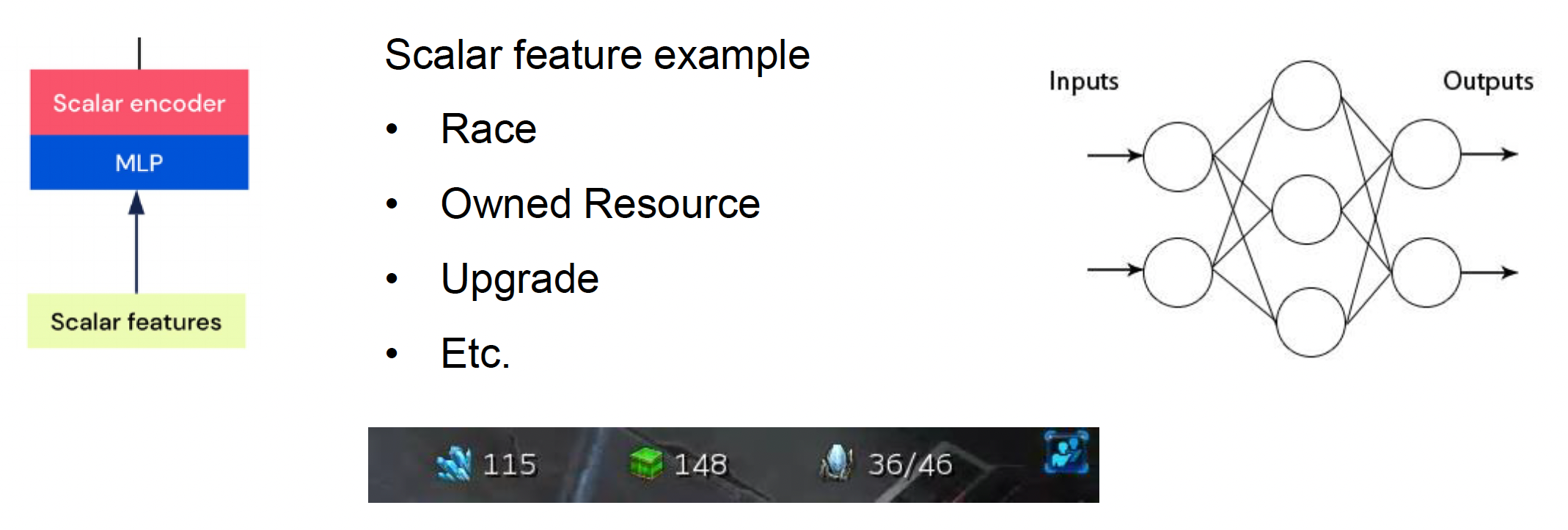
多层感知机(multi-layer perceptron, MLP)
- 经典,且易实现
- 输入和输出的维度可灵活定义
-
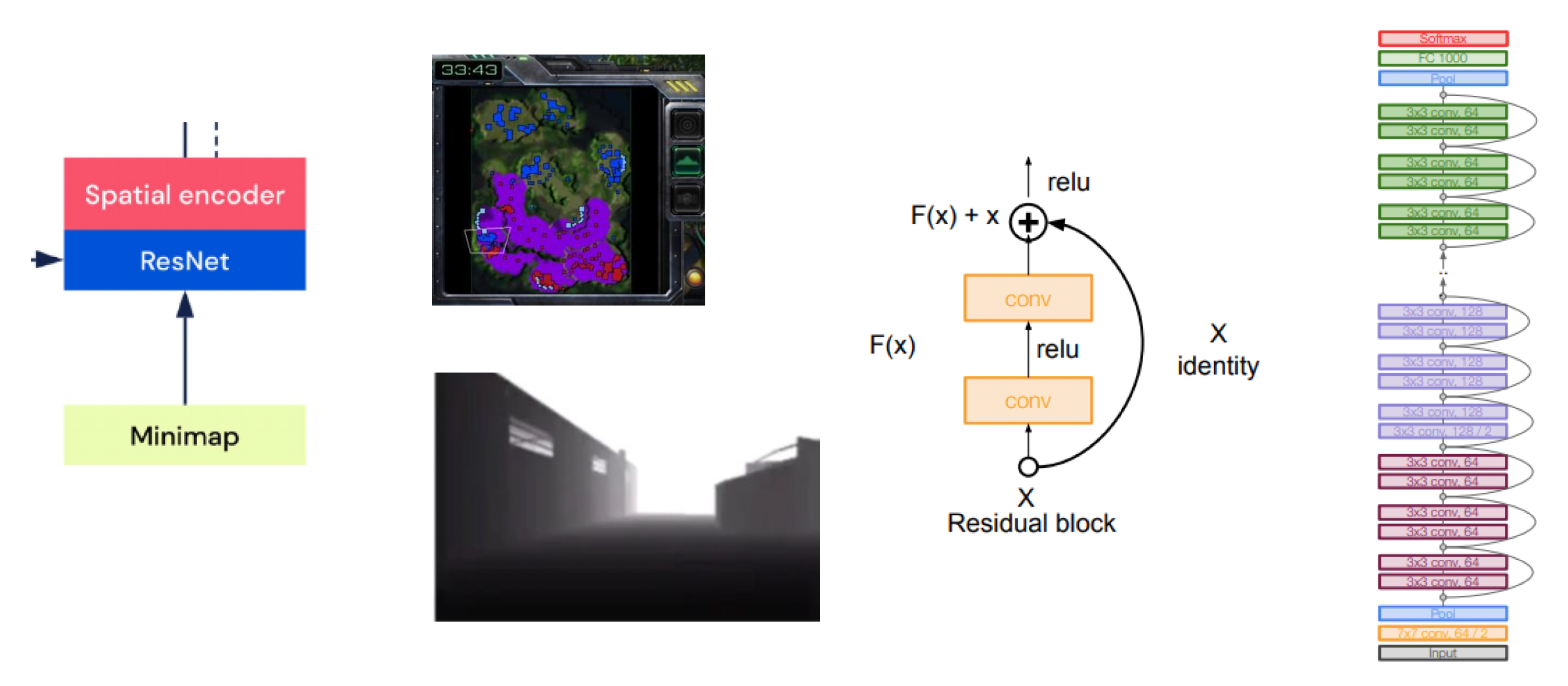
卷积神经网络(convolutional neural network, CNN):专注于图像数据处理
-
Transformer
- 引入注意力机制
- 不确定的向量长度
- 可以表示像多智能体那样的复杂特征

-
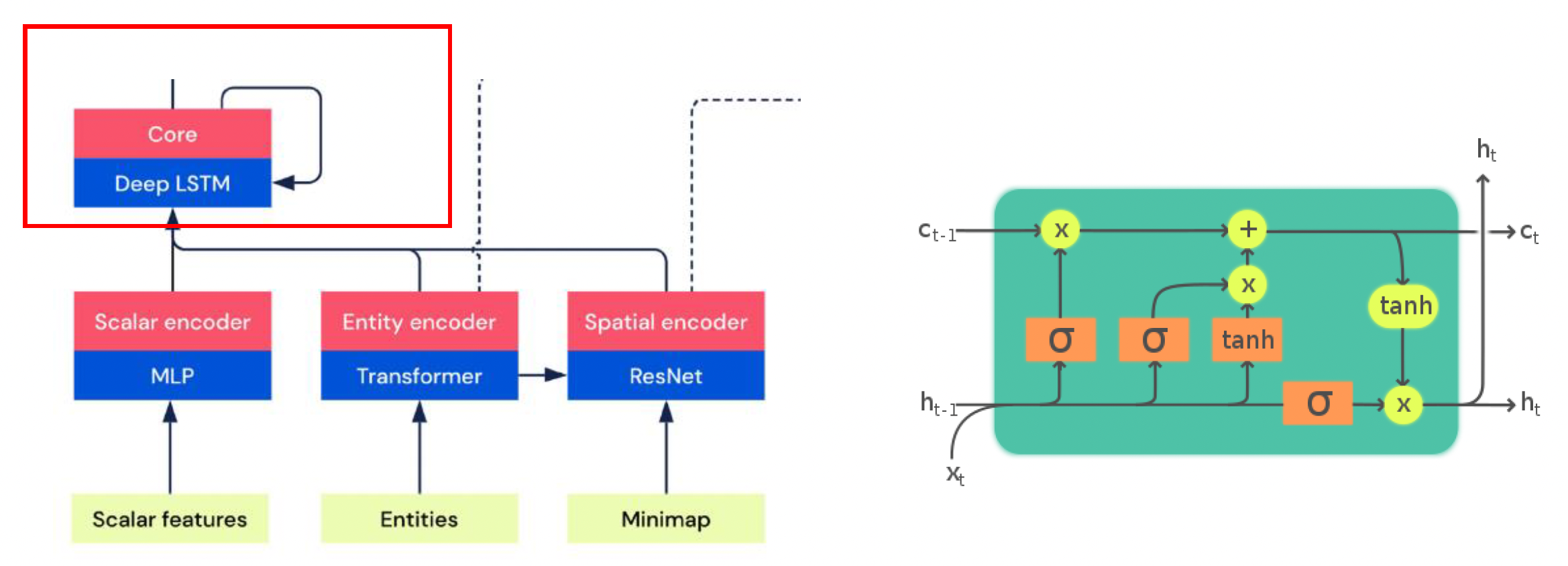
长短期记忆(long-short term memory, LSTM):使 AI 记住或遗忘更早的数据
根据特征类型的不同,NN 架构也有不同的选择。特征类型可以是:
- 定长向量特征 -> MLP
- 变长向量特征 -> LSTM, Transformer
- 图像特征 -> ResNet
- 射线投射
- 网格
Training Strategies⚓︎
AlphaStar 同时采取以下训练策略。训练顺序是:
-
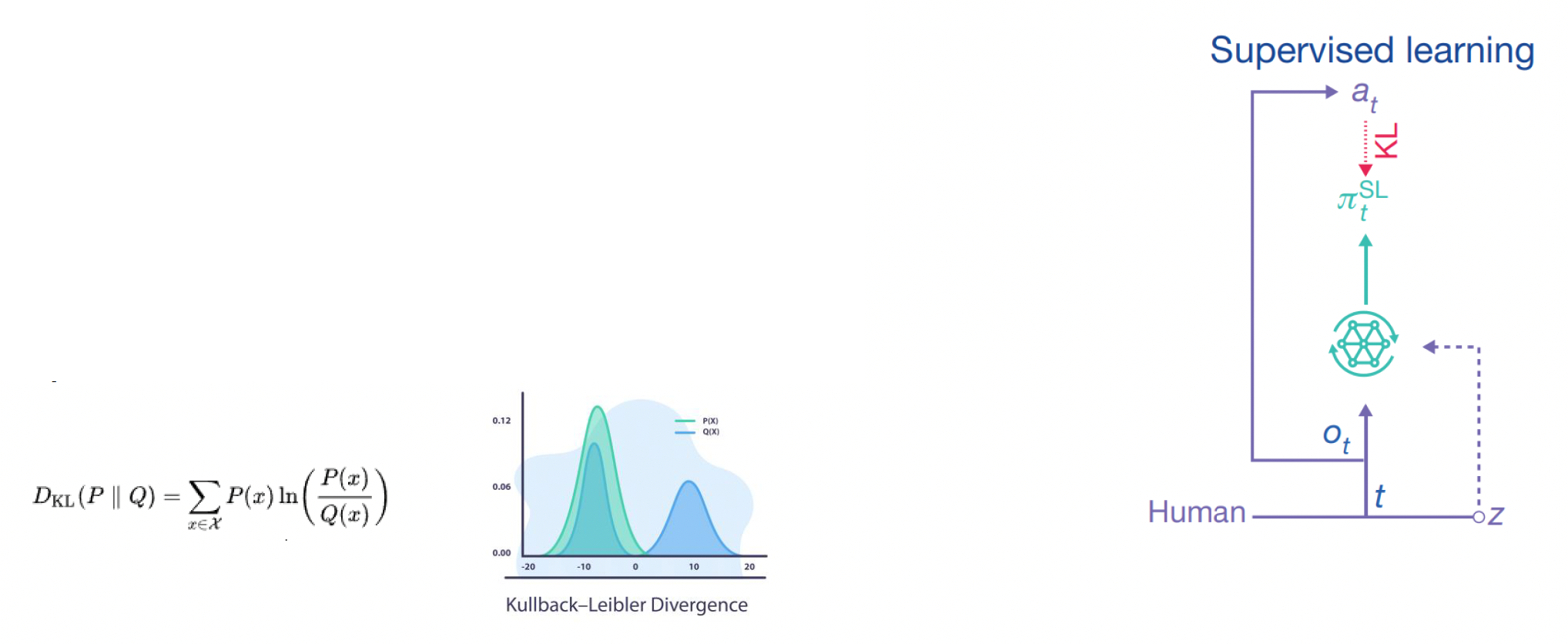
监督学习
- z 是从人类数据(比如建造顺序)中抽取策略的统计摘要
- 目标:最小化智能体策略与从 z 采样到的人类决策分布之间的距离(KL 散度)
-
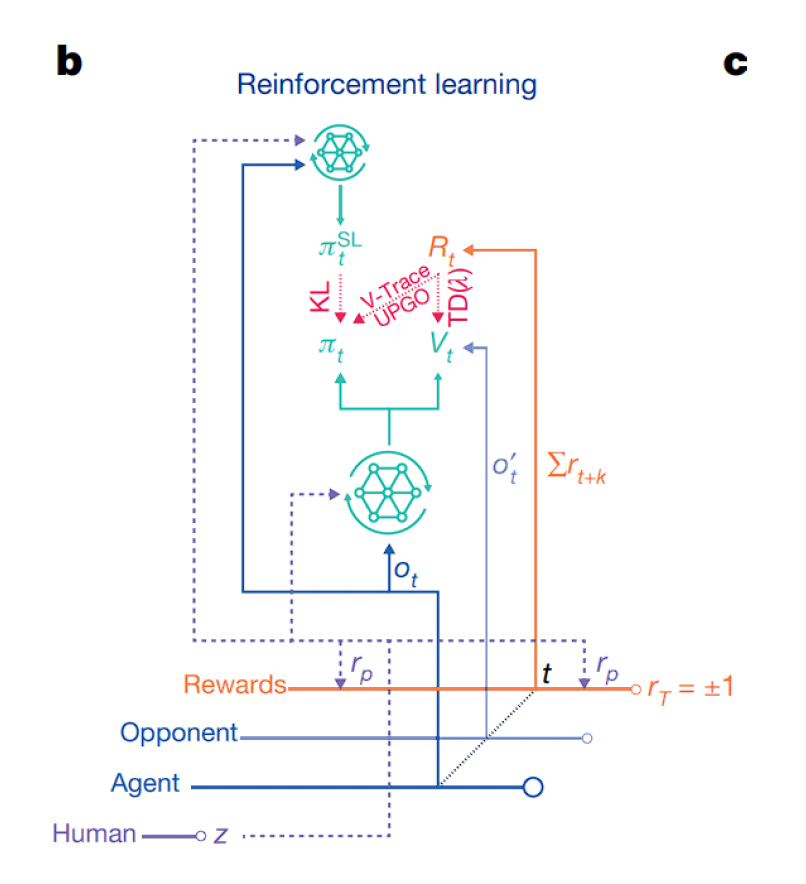
强化学习
- TD(λ)、V-trace、UPGO 是用于改进参与者网络和批评者网络的特定 RL 方法
- 也会考虑先前 SL 策略的 KL 散度
- 这些技巧改进了策略,使智能体更接近人类行为
-
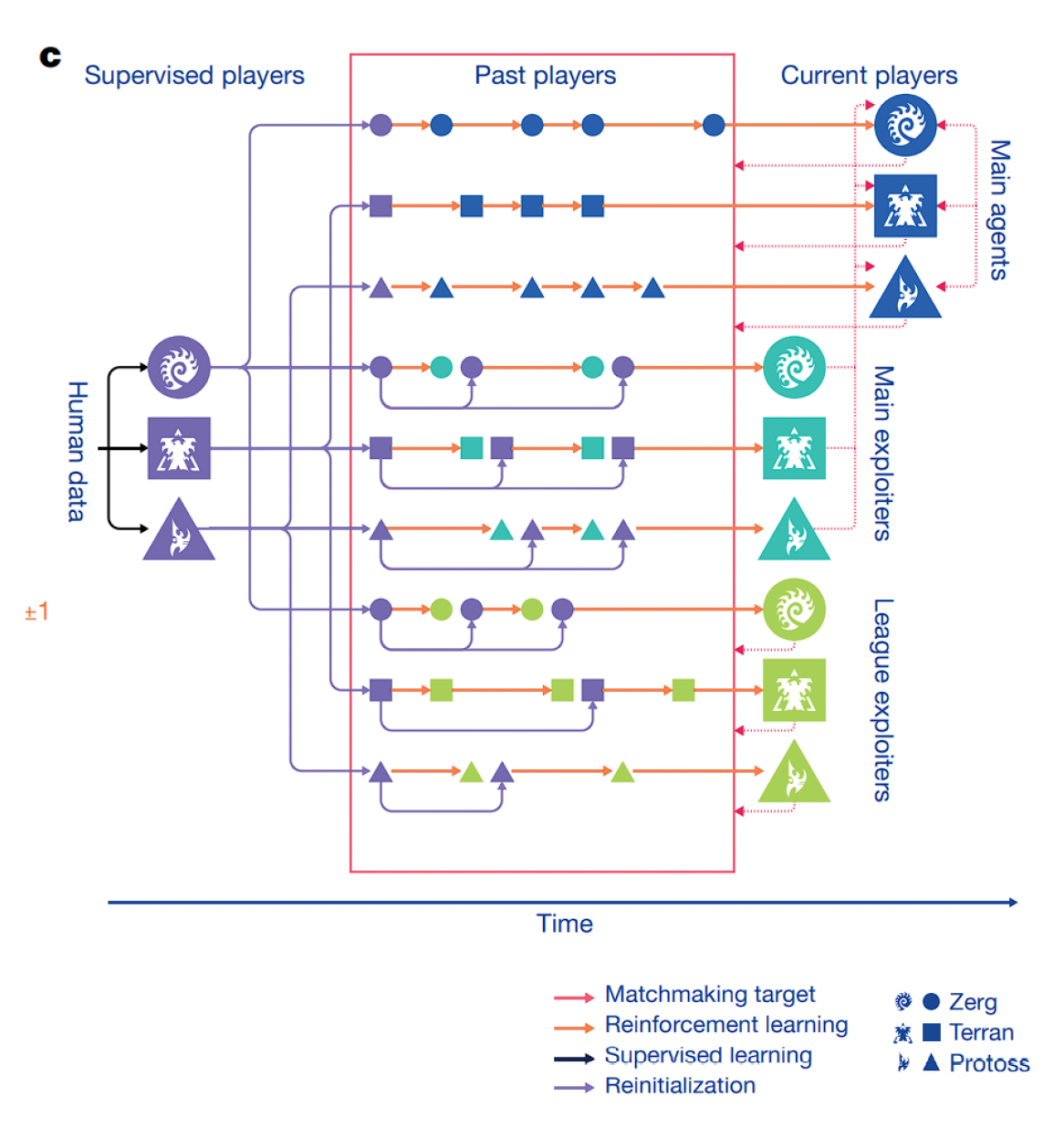
自我游玩和对抗:在 AlphaStar 中,三个智能体池参加从 SL 策略初始化的训练
-
主智能体 [MA]
- 目标:最鲁棒和输出
- 自我对弈(35%)
- 与过去的 LE 和 ME 智能体对战(50%)
- 与过去的 MA 对战(15%)
-
联盟利用者 [LE]
- 目标:找出所有过去智能体(MA、LE、ME)的弱点
- 与所有过去的智能体(MA、LE、ME)对战
-
主利用者 [ME]
- 目标:找出当前主智能体的弱点
- 与当前主智能体对战
-
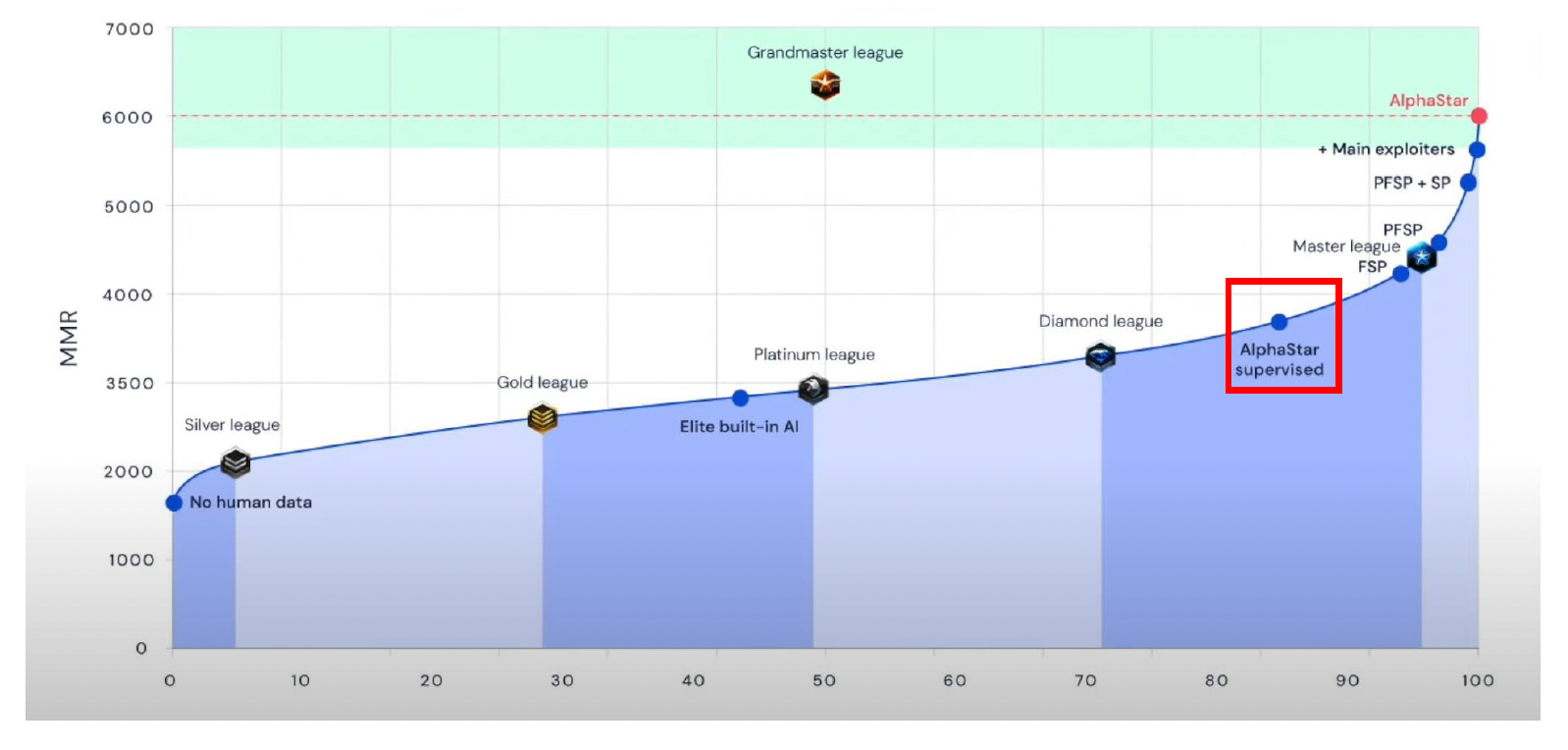
那么究竟是选择 SL 好还是 RL 好呢?
-
SL
- 监督学习需要高质量的数据,有时表现也相当好
- 智能体行为接近人类,但可能无法超越人类专家数据
- 人类数据不均衡,且有时数据量不足
- 适用场景:获取数据容易,且需要表现得和人类相似
-
RL:虽然通常被认为是最优策略,但训练 RL 模型相当困难
- 模型难以收敛
- 训练的游戏环境也是一个巨大的开发项目
- 数据收集过程很慢
- 行为可能不自然
- 如果奖励过于稀疏,也不利好 RL
例子
- 适用场景:需要有大师级的表现,足够多的预算,数据不可用,奖励稠密
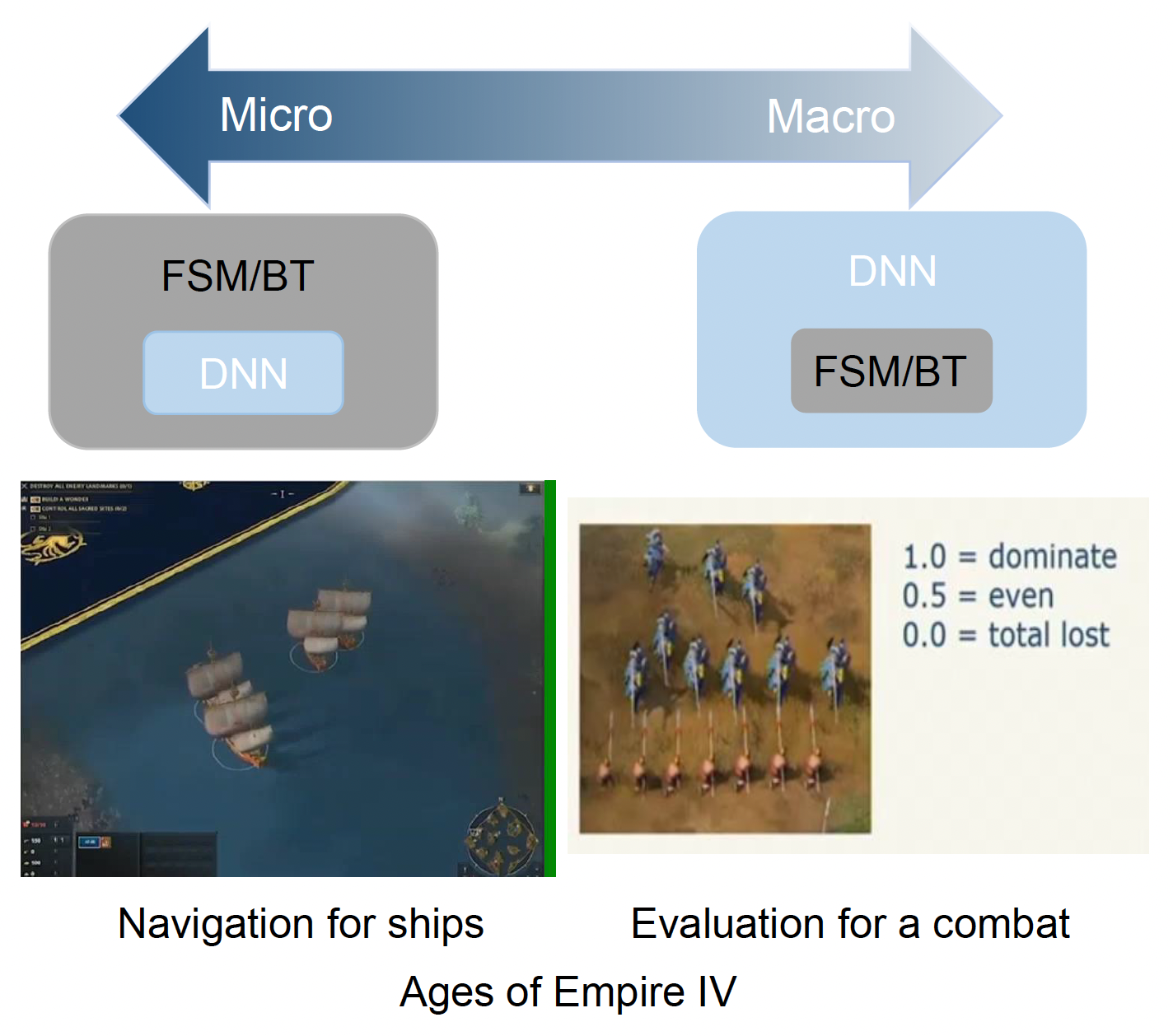
虽然机器学习非常强大,但它的成本也很高。比如 DeepMind 搭建 AlphaStar 花费了 2.5 亿美元,而且即便是复制品也要 1300 万美元。因此我们常常需要在将 DRL 放置在人类水平(整体战斗的一部分)之间进行权衡。
评论区