Instruction Selection⚓︎
约 2812 个字 56 行代码 预计阅读时间 15 分钟
核心知识
- 树模式
- 全局 / 局部最优平铺
-
指令选择算法
- 最大匹配(局部最优,自顶向下)
- 动态规划(全局最优,自底向上)
- 树文法
-
CISC vs RISC,以及 CISC 的问题和解决
- Tiger 编译器中的指令选择(了解即可)
Overview⚓︎
本讲的目标是将规范树转换为汇编语言。
原因:
- 中间表示(树)语言在每个树节点中仅表达一个操作,比如取数、存储、加法、减法、条件跳转等
- 而真实的机器指令通常可以执行多个基本操作
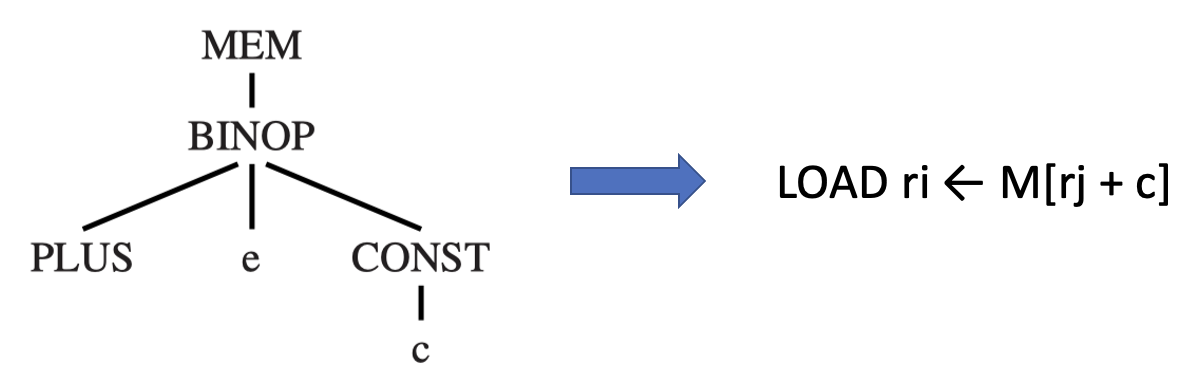
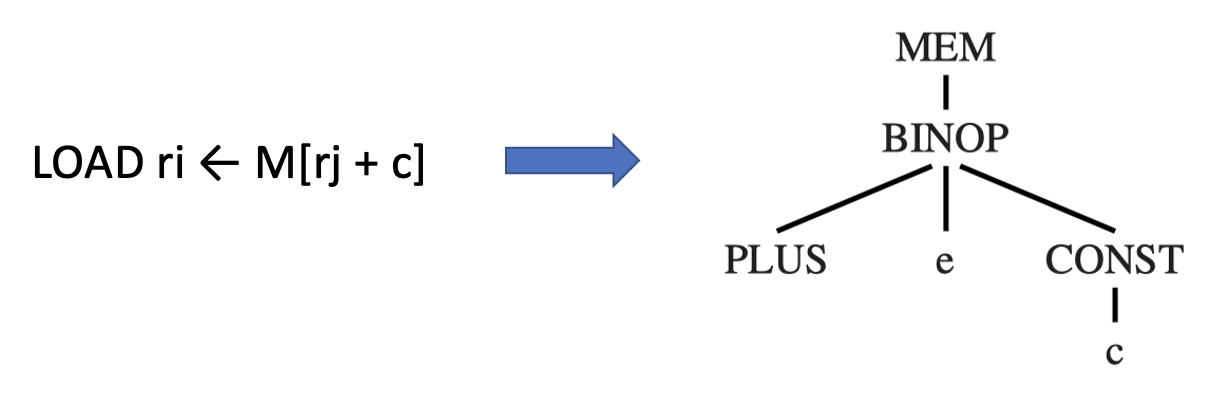
指令选择(instruction selection) 阶段:为给定的 IR 树寻找合适的机器指令来实现
Tree Patterns⚓︎
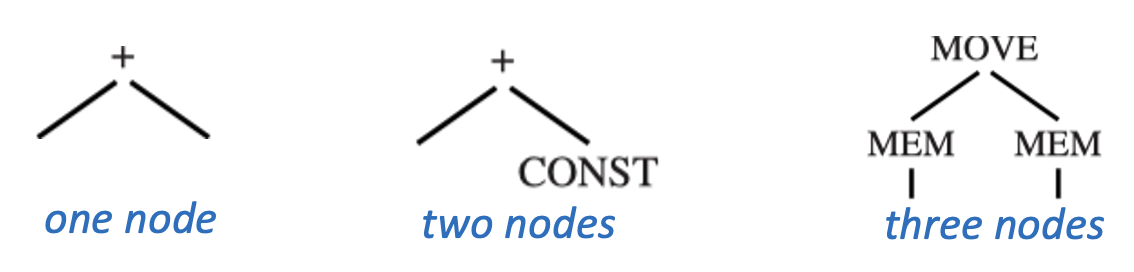
每条机器指令都可以表示为 IR 树的一个片段,称为树模式(tree pattern)。
- 平铺(tiling):用互不重叠的树模式覆盖整棵树
- 指令选择:用一组最少的树模式覆盖整棵树的平铺过程
为便于解释指令选择,我们设计了一个 Jouette 架构指令集:
Jouette 在法语中意为“玩具”
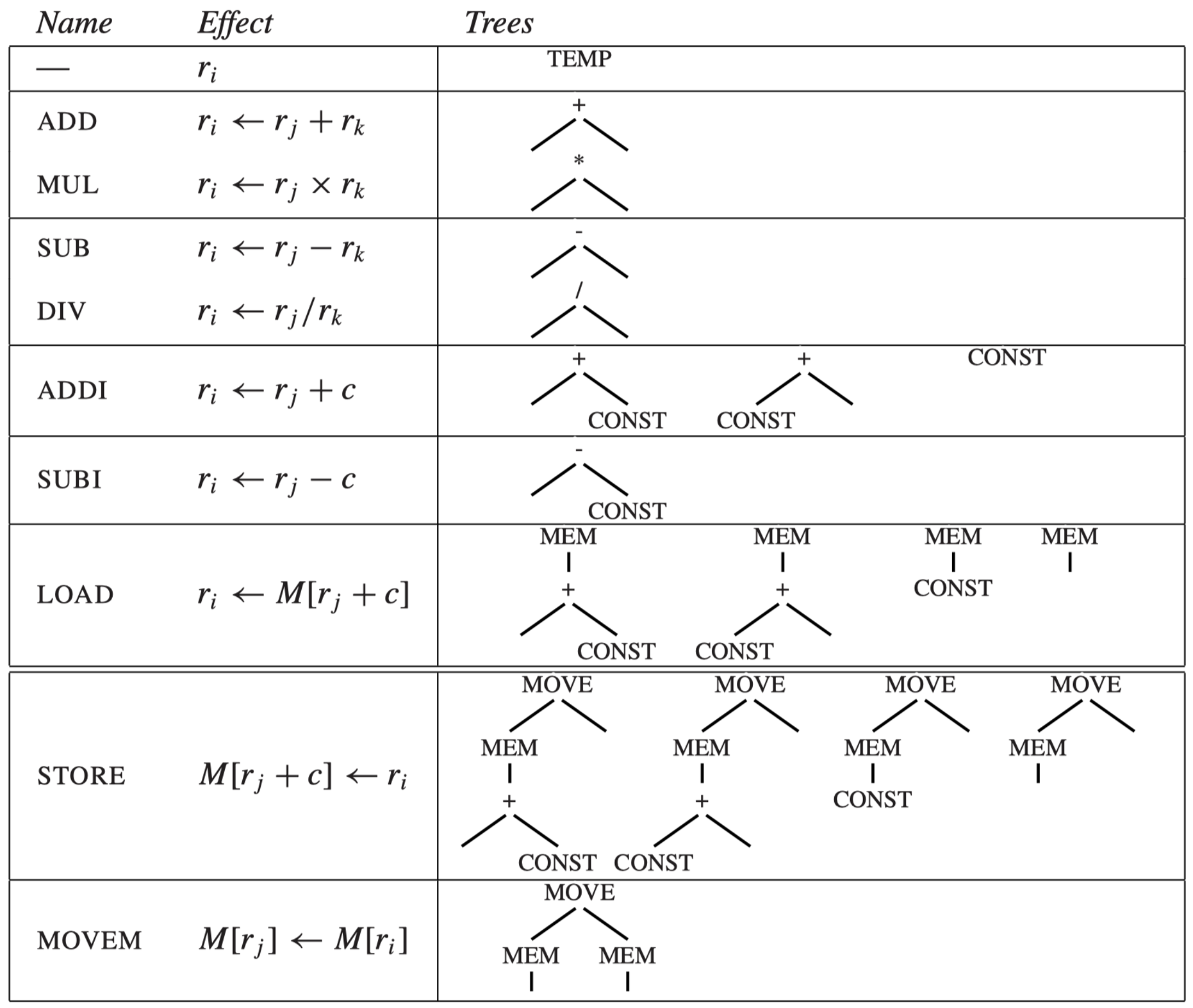
BINOP(PLUS, x, y) => +(x, y)r0 = 0c可以是 0CONST和TEMP节点的真实值并不总是展现出来
例子
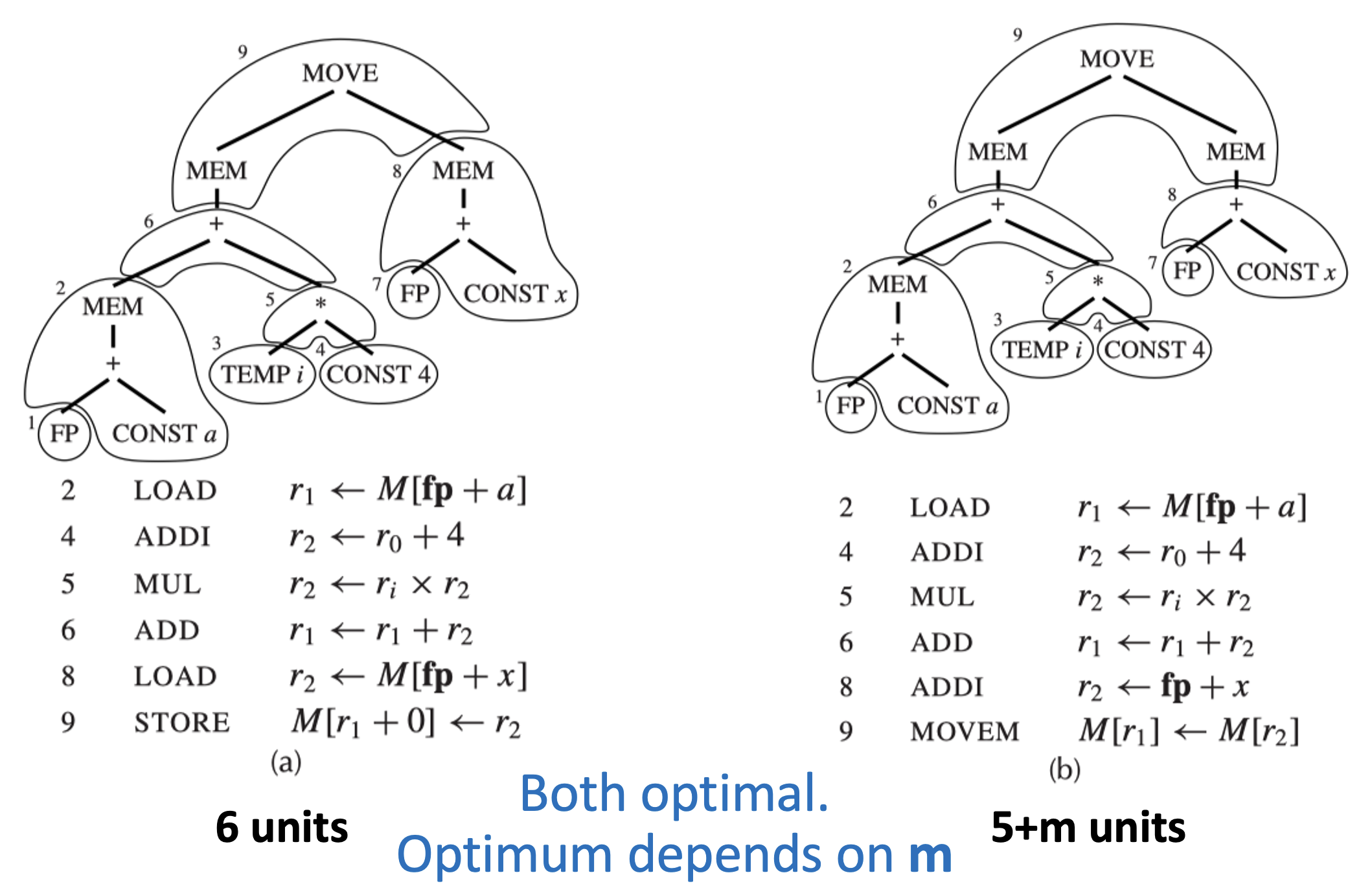
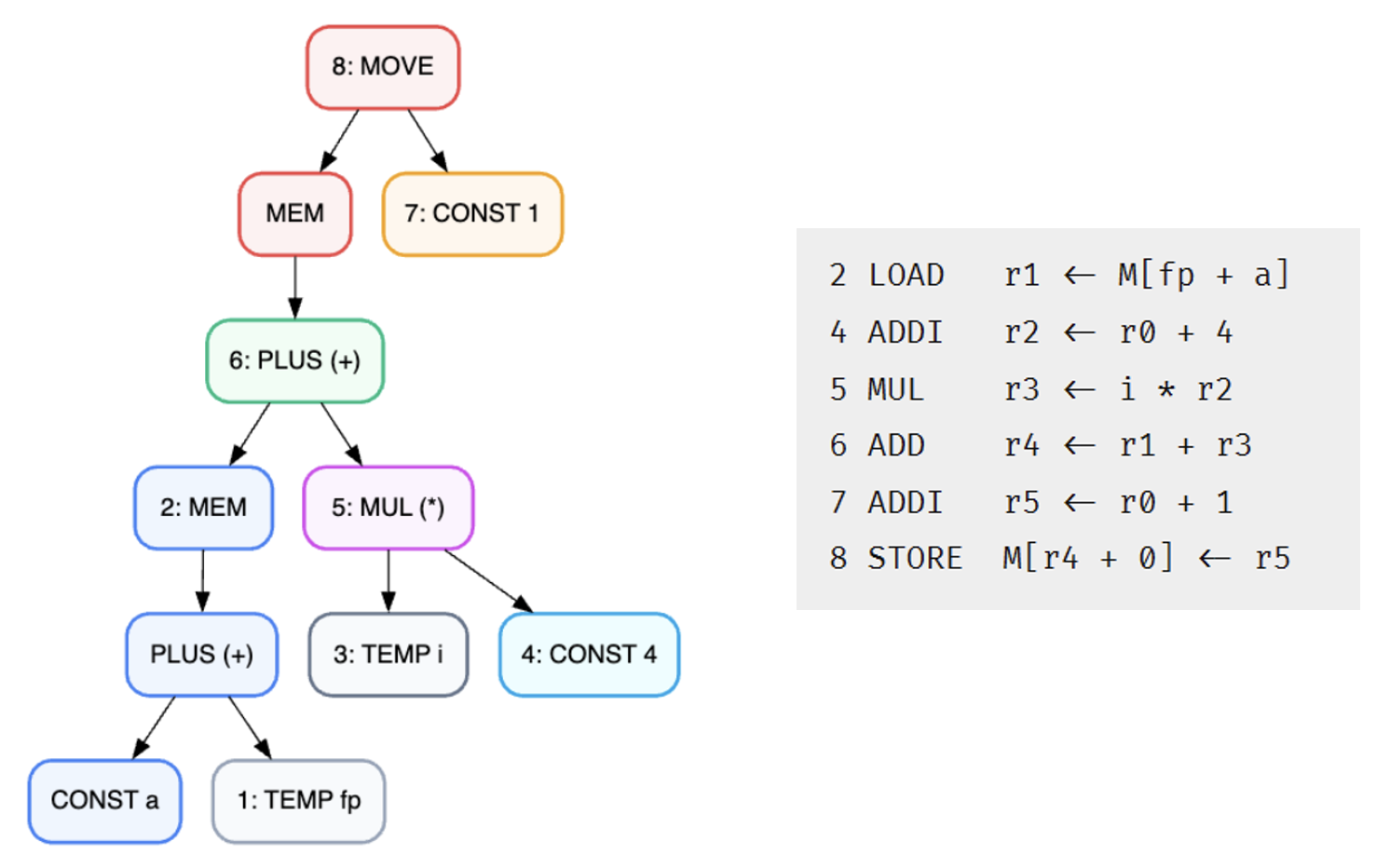
a[i] := x 有以下两种平铺方式。
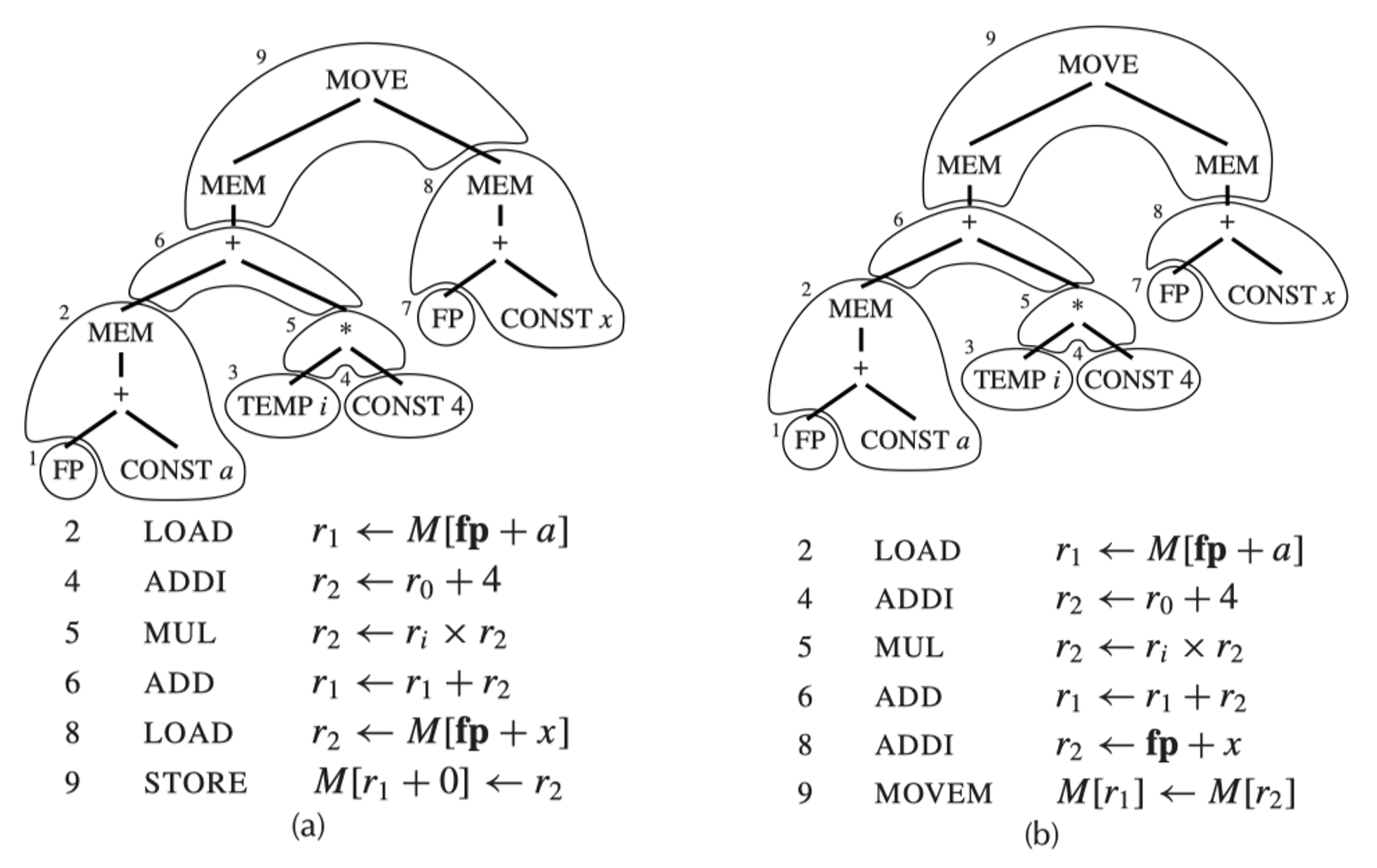
覆盖块 1、3 和 7 不对应任何机器指令,因为它们只是寄存器(
TEMPs) 。
Optimal and Optimum Tilings⚓︎
-
最佳平铺(best tiling):
- 成本最小的指令序列,即最短的指令序列
- 或者:如果指令执行时间不同,则总时间最小的成本最小序列
-
(全局)最优平铺(optimum tiling):平铺块的总和达到可能的最小值
-
(局部)最优平铺(optimal tiling):不存在两个相邻平铺块可以合并成一个成本更低的平铺块
- 如果某个树形模式可以拆分为多个平铺块,且这些平铺块的总成本更低,那么该模式应从平铺块目录 (catalog) 中移除
-
每个全局最优平铺都是局部最优的,但反之则不然
例子
Algorithms for Instruction Selection⚓︎
全局最佳平铺算法比局部最佳平铺算法简单。
- CISC:两者区别显而易见,有些指令能完成多个操作
- RISC:通常两者没有任何区别,因为覆盖块小,成本一致,因此对 RISC 来说简单的平铺算法就足够了
Maximal Munch⚓︎
最大匹配(maximal munch) 是用于局部最优平铺的(贪心)算法。其主要思路为:
-
从树的根节点开始,找到能匹配的最大覆盖块(包含节点数最多的覆盖块)
-
用这个覆盖块覆盖根节点,可能还包括根节点附近的若干其他节点;留下若干子树
- 剩余每棵子树重复上述步骤
- 如果两个大小相等的覆盖块在根处匹配,则可从它们之间任选其一
- 按相反顺序生成指令
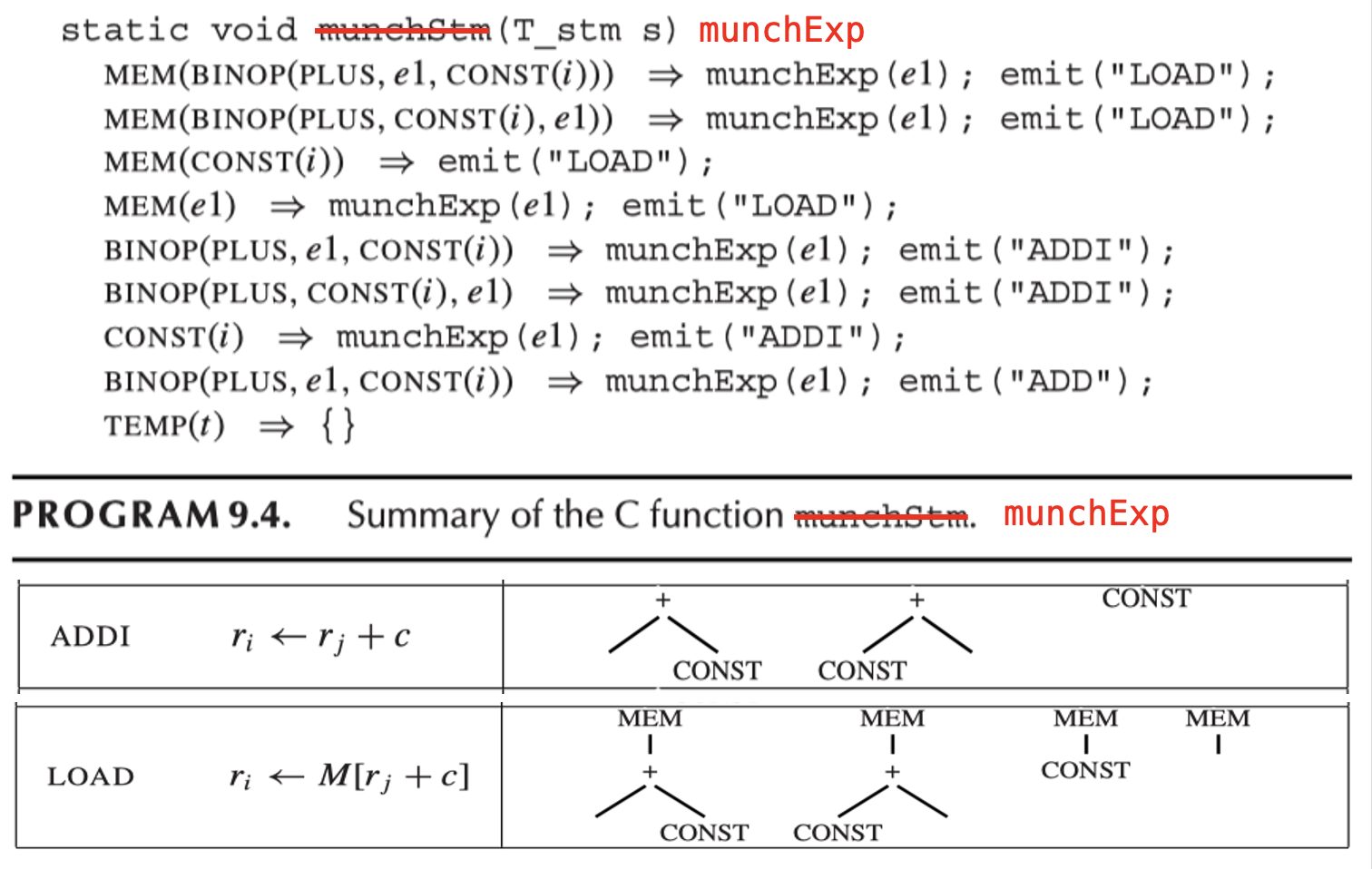
实现为:
- 两个递归函数:
munchStm用于语句,munchExp用于表达式 -
按照覆盖块偏好顺序进行解析(从最大的覆盖块开始
) :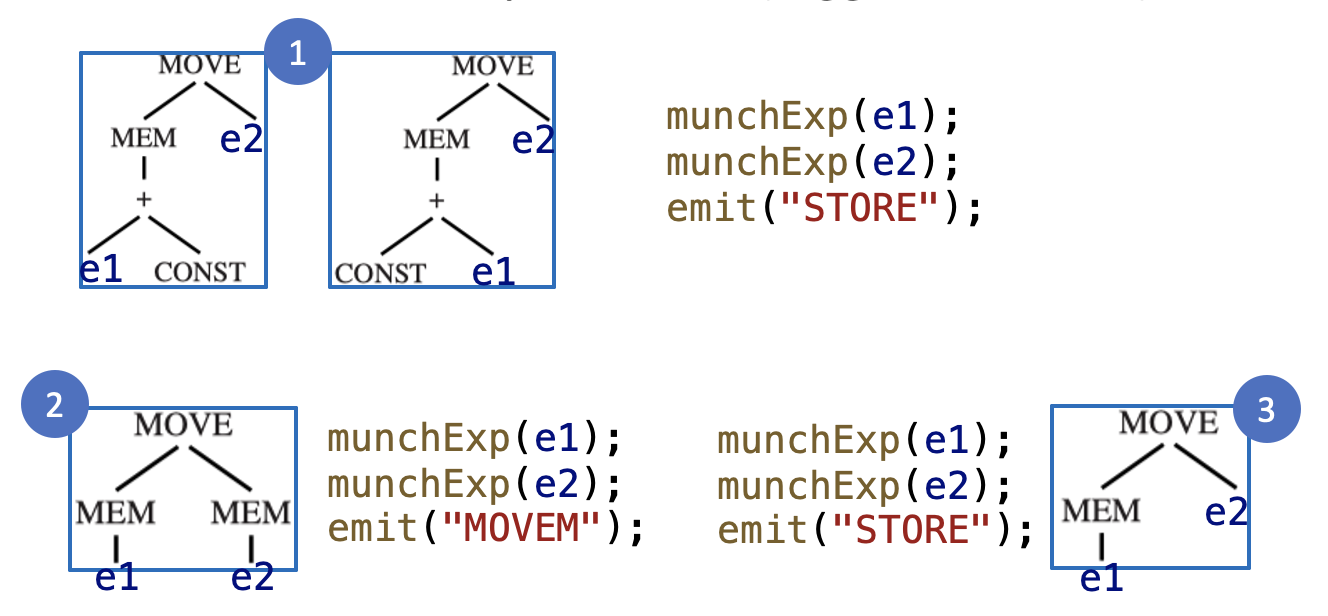
指令的运算符之后再确定。
伪代码如下所示:
例子
来自 Quiz 4
来自作业题 9.1
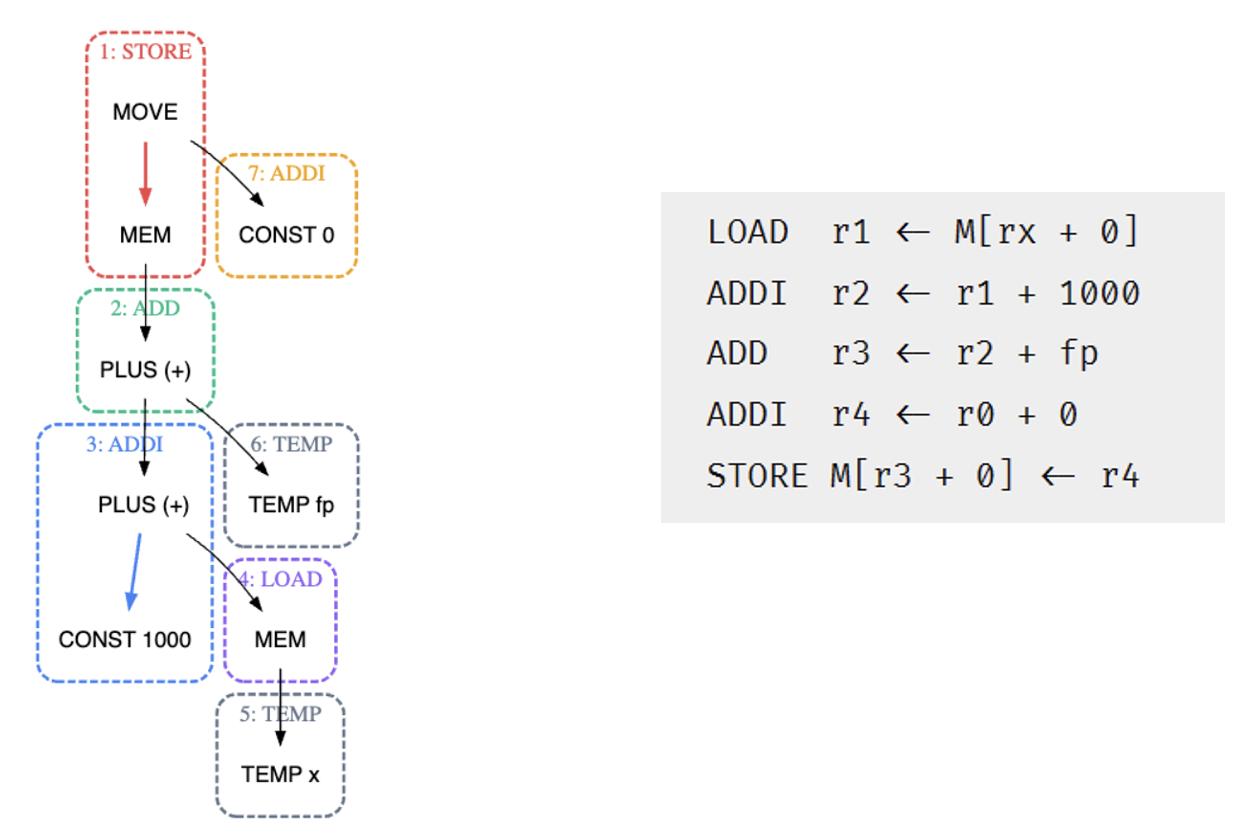
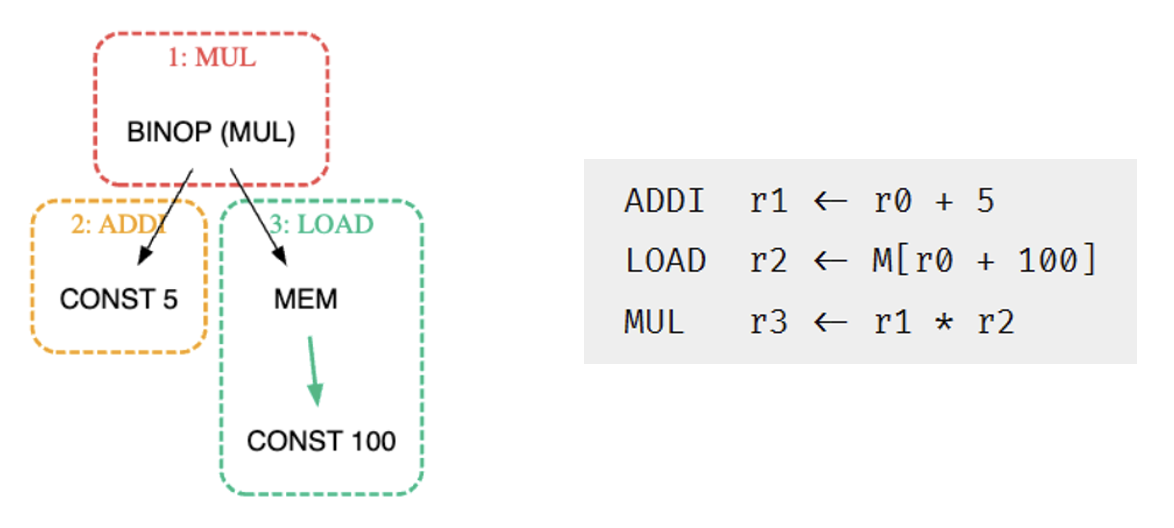
For each of the following expressions, draw the tree and generate Jouette-machine instructions using Maximal Munch. Circle the tiles (as in #text(teal)[Figure 9.2]), but number them in the order that they are munched, and show the sequence of Jouette instructions that results.
MOVE(MEM(+(+(CONST 1000, MEM(TEMP x)), TEMP fp)), CONST 0)BINOP(MUL, CONST 5, MEM(CONST 100))
Dynamic Programming⚓︎
动态规划(DP)可以根据每个子问题的最优解找到全局最优解。
- 自底向上(最大匹配是自顶向下的)
- 为树中的每个节点分配一个成本(能够铺满以该节点为根的子树的最佳指令序列的指令成本之和)
给定具有根节点 \(n\) 的 IR 树
- 递归地找到节点 \(n\) 的所有子节点(以及孙子节点等)的成本
- 将每个树模式(覆盖块类型)与节点 \(n\) 进行匹配
- 每个覆盖块有零个或多个叶子,这些是子树可以附加的位置
-
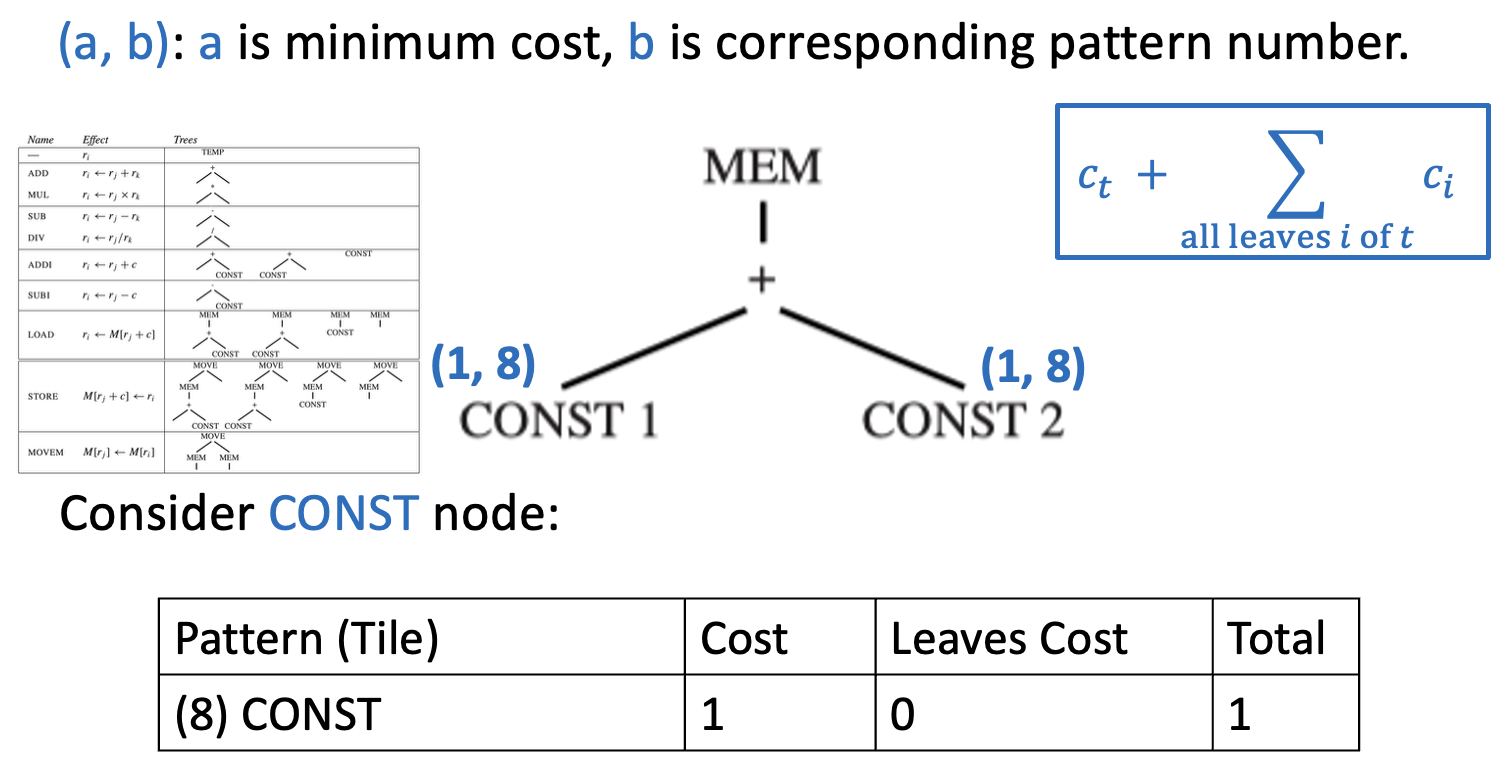
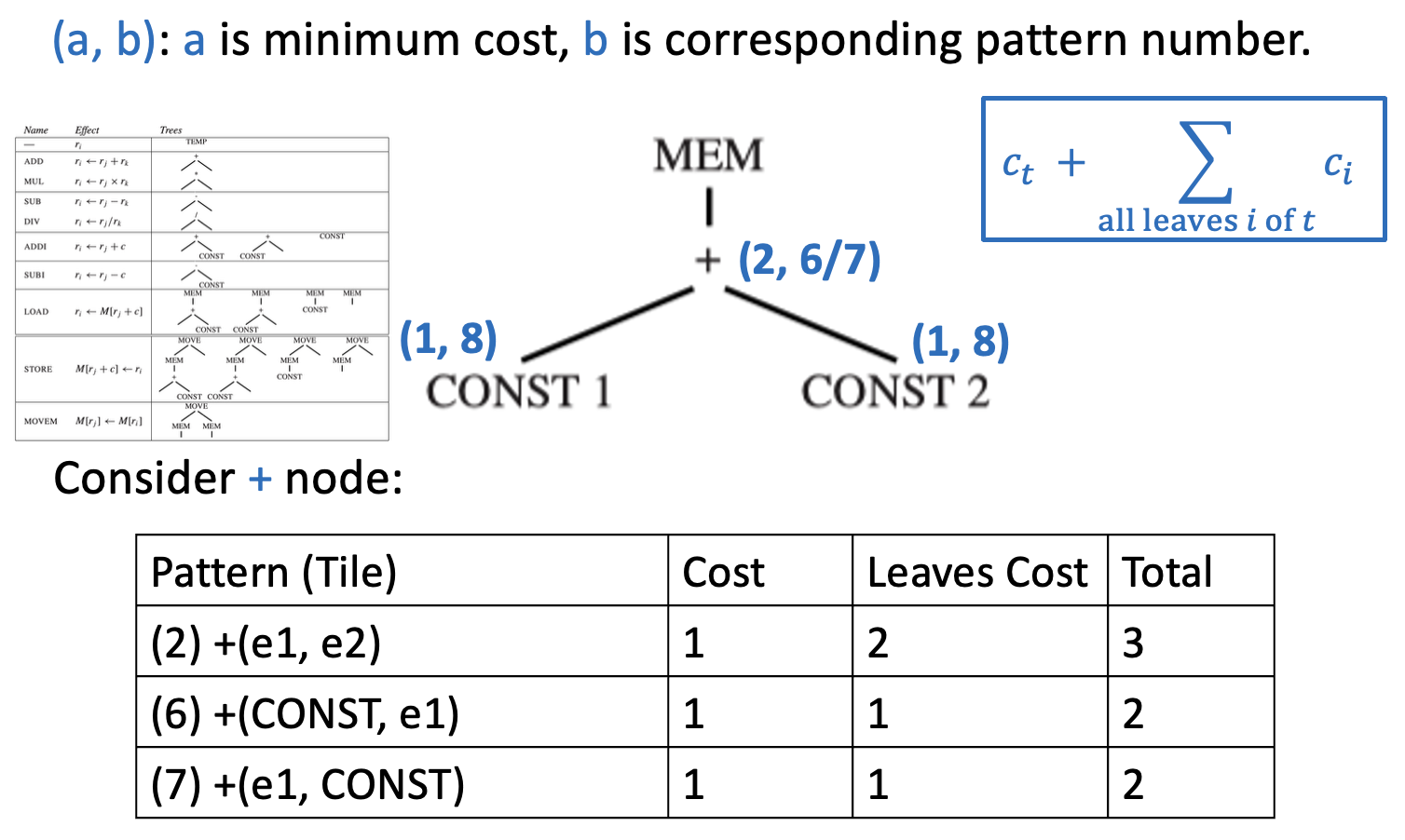
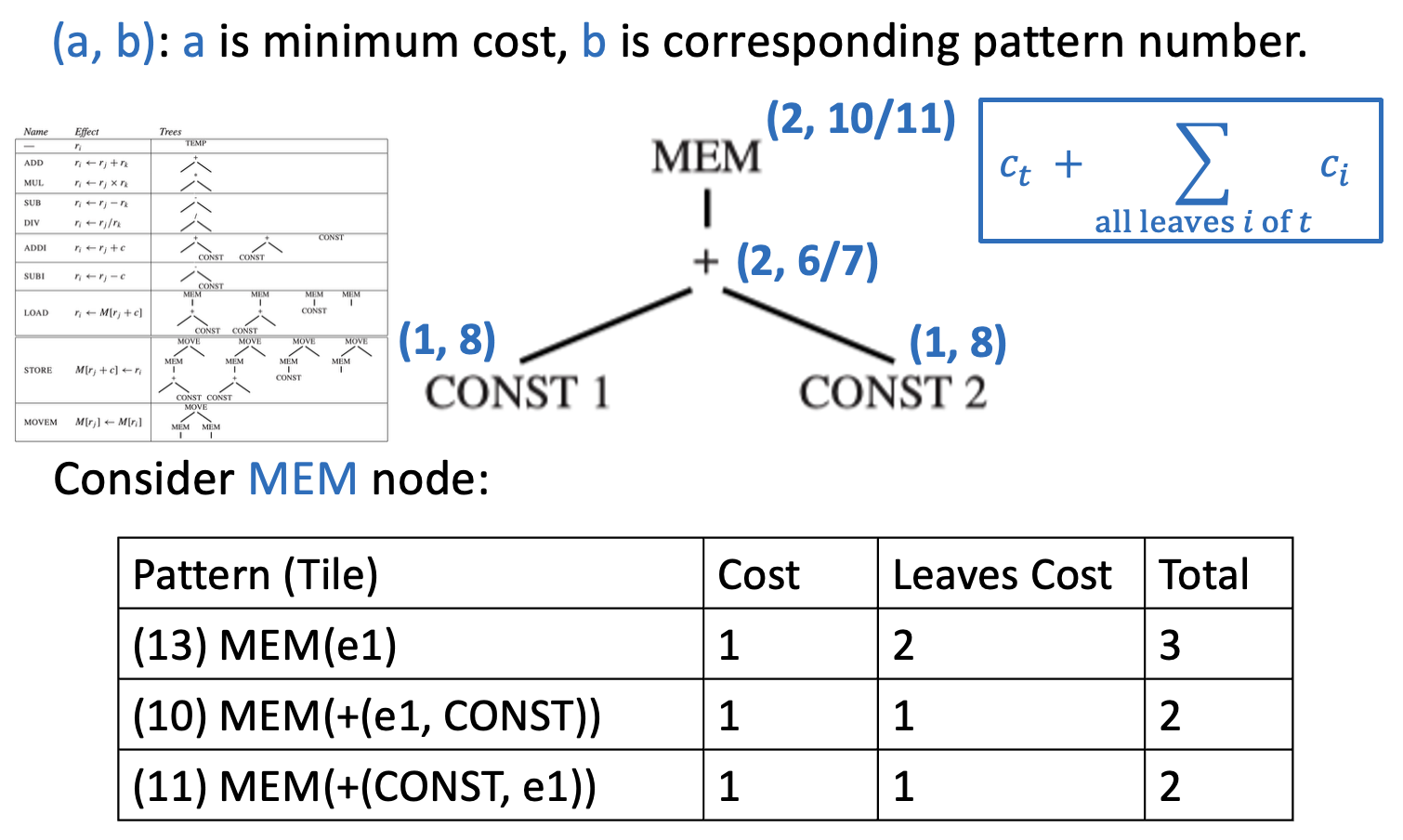
对于在节点 \(n\) 匹配的成本为 \(c_t\) 的每个覆盖块 \(t\),匹配覆盖块 \(t\) 的成本是(\(c_i\) 已经计算过
) :\[ c_t + \sum_{\text{all leaves } i \text{ of } t} c_i \] -
选择成本最小的树模式
例子
一旦找到根节点(也就是整棵树的成本Emission(node n))便开始。过程如下:
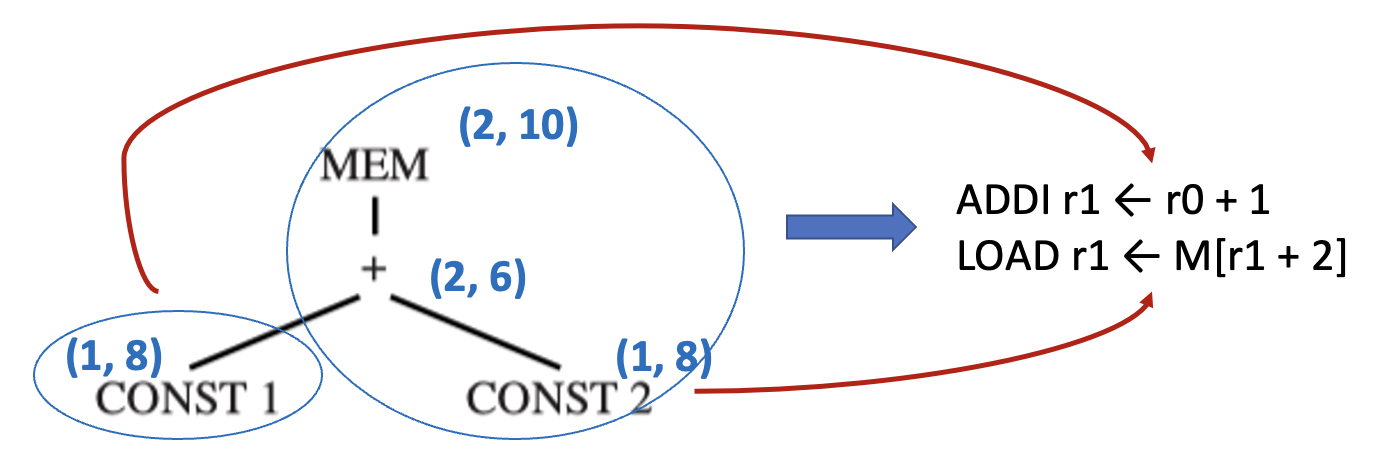
- 对于在节点
n处匹配的覆盖块的每个叶子节点li,执行Emission(li) - 发射在节点
n处匹配的指令
Tree Grammars⚓︎
对于具有复杂指令集以及多类寄存器和寻址模式的机器,存在一种动态规划算法的有用推广。
-
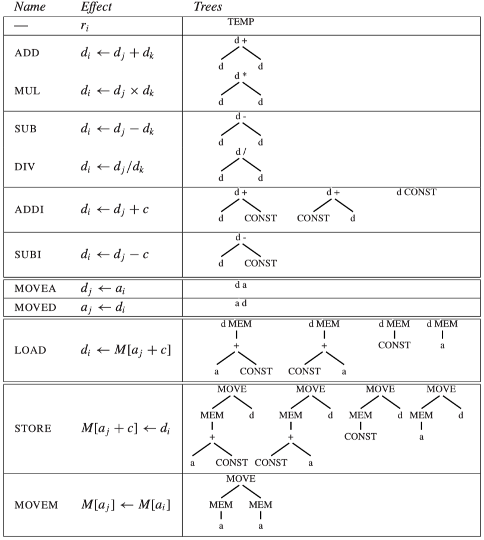
简化版的 Jouette(Schizo-Jouette 架构
) :- \(\sigma\) 寄存器用于寻址
- \(d\) 寄存器用于数据
-
每个覆盖块的根节点和叶节点必须标记为 \(a\) 或 \(d\)
- DP 算法必须跟踪每个节点,将最小成本匹配作为 \(a\) 寄存器和 \(d\) 寄存器
这里采用 CFG 描述覆盖块。它有非终结符:
- \(s\):表示语句
- \(a\):表示计算到 \(a\) 寄存器中的表达式
- \(d\):表示计算到 \(d\) 寄存器中的表达式
LOAD、MOVEA 和 MOVED 指令的文法规则可能如下所示:
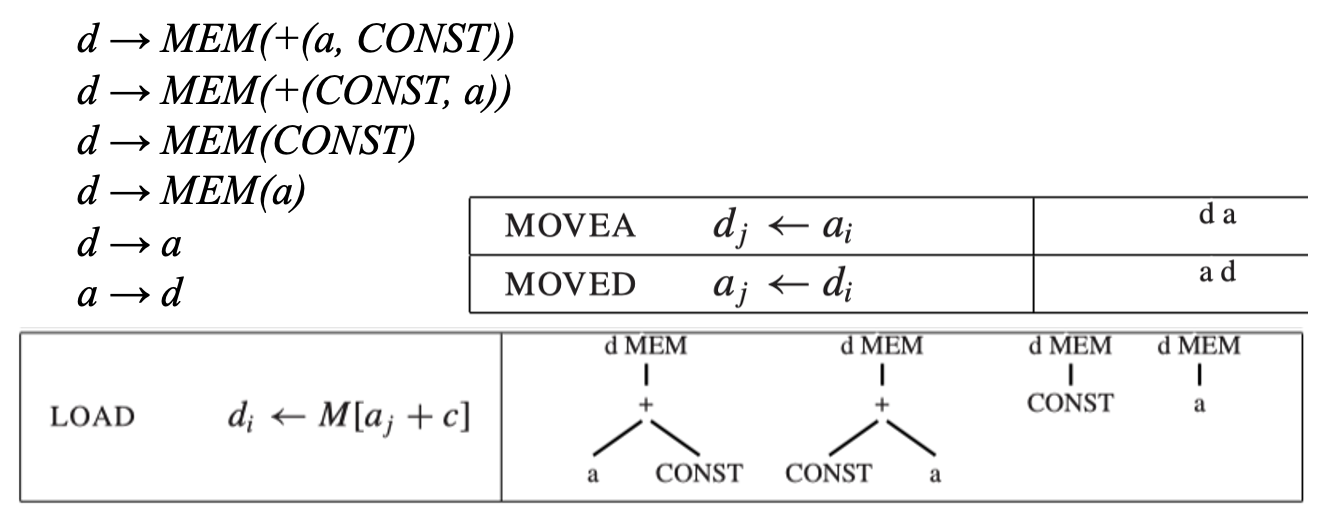
- 这样的语法很有歧义性,因为存在许多不同的指令序列来实现同一个表达式
- 第 3 章中描述的语法分析技术的实用价值有限
- 但 DP 算法的一种通用化扩展效果相当好,即为文法中的每个非终结符,在每个节点计算最小成本匹配
Fast Matching⚓︎
最大匹配和动态规划算法检查所有与节点匹配的覆盖块。
- 若覆盖块的每个非叶节点都标记了与树中相应节点相同的运算符(
MEM、CONST等) ,那么该覆盖块匹配 -
为了匹配树中节点
n的覆盖块,可以在n的标签中使用case语句(即决策树) : -
目标:IR 树中的每个节点不会被检查两次
Efficiency of Tiling Algorithms⚓︎
假设:
- T:不同覆盖块的数量
- K:平均每个匹配覆盖块包含 K 个非叶节点
- K':在给定子树中,为了确定哪些覆盖块匹配而需要检查的最大节点数
- T':在每个树节点上匹配的平均不同模式(覆盖块)数量
- N:输入树中的节点数
MM 和 DP 的成本分别为:
- 最大匹配(MM
) :与 (K' + T') * N / K 成正比 - 动态规划(DP
) :与 (K' + T') * N 成正比
由于 K、K' 和 T' 均为常数,这些算法的运行时间都是线性的。
CISC Machines⚓︎
RISC vs CISC
| RISC 机器 | CISC 机器 |
|---|---|
| 32 个寄存器 | 少量寄存器(16 / 8 / 6 个) |
| 只有一类整数 / 指针寄存器 | 寄存器被划分为不同的类别,某些操作只能在特定的寄存器上进行; |
| 算术运算只能在寄存器之间进行 | 算术运算可以通过「寻址方式」访问寄存器或内存; |
| 三地址格式的指令 \(r_1 \leftarrow r_2 \oplus r_3\) | 二地址格式的指令 \(r_1 \leftarrow r_1 \oplus r_2\); |
| 只具有 \(M[\text{寄存器}+\text{常数}]\) 寻址方式的加载和存储指令 | 具有多种不同的寻址方式; |
| 每条指令长度固定为 32 位 | 可变长指令,由可变长操作码加上可变长的寻址方式组成; |
| 每条指令只产生一个结果或效果 | 具有副作用的指令,例如「自动递增」寻址方式。 |
CISC 的问题和解决方案:
- 寄存器不足:
- 解决方案:自由生成
TEMP节点,并假设寄存器分配器能做好工作
- 解决方案:自由生成
-
寄存器的分类:
- Pentium 上的乘法运算:左操作数必须是
eax,结果的高位放入edx(低位放在eax中) ,但高位对于 Tiger 程序来说是无用的 - 解决方案:显式移动操作数和结果
-
示例:要实现 t1 <- t2 * t3:
- Pentium 上的乘法运算:左操作数必须是
-
双地址指令:
- 目标寄存器必须与第一个源寄存器相同
- 解决方案:添加额外的移动指令
-
示例:要实现 t1 <- t2 + t3,我们希望寄存器分配器能够将 t1 和 t2 分配到同一个寄存器,从而删除
move指令
-
算术运算可以访问内存:
- 指令选择阶段会将每个
TEMP节点转化为寄存器引用,而实际上许多这样的寄存器最终会成为内存位置 - 解决方案:在操作之前将所有操作数取出到寄存器中,操作之后再将其存回内存
-
示例:以下两个序列计算结果相同:
- 右边的序列更简洁,但两个序列的速度同样快
- 左边的序列有一个显著缺点:它会破坏寄存器
eax中的值
- 指令选择阶段会将每个
-
几种寻址模式:
- 一种能够完成六项任务的寻址模式通常需要执行六个步骤,这意味着速度并不快
-
但有两个优点:
- 占用更少的寄存器
- 更短的指令编码
-
经过一定处理后,基于树匹配的指令选择机制可以选出 CISC 指令,但使用类似 RISC 的简单指令同样能达到相同的执行速度
-
可变长度指令:
- 对于编译器来说并不是问题
- 一旦指令被选定,汇编器只需将指令编码输出,这是一个琐碎的任务
-
带有副作用的指令:
-
问题:某些机器具有自增内存取指令,其效果为:
-
难以使用树模式进行建模,因为这会产生两个结果
- 有三种解决方案:
- 忽略自增指令,希望它们会消失
- 在树模式匹配代码生成器的上下文中,以临时(ad hoc)方式尝试匹配特殊惯用法 (idioms)
- 完全采用不同的指令算法,一种基于 DAG 模式(参见龙书)而非树模式的算法
-
Instruction Selection for the Tiger Compiler⚓︎
在由指令模式平铺的树中,每个平铺的根节点将对应于寄存器中保存的某个中间结果。寄存器分配(register allocation) 的任务是给这些节点分配寄存器编号。
- 很多方面与特定目标机器的指令集无关
- 应在指令选择之前或之后进行:
- 在指令选择之前:甚至不知道哪些树节点需要寄存器来保存其结果,因为只有平铺的根节点(而非平铺内的其他标记节点)需要显式寄存器,因此无法准确完成
- 因此我们将在指令选择之后进行寄存器分配
Abstract Assembly Language Instructions⚓︎
typedef struct {Temp_labelList labels;} *AS_targets;
typedef struct {
enum {I_OPER, I_LABEL, I_MOVE} kind;
union {
struct {string assem; Temp_tempList dst, src; AS_targets jumps;} OPER;
struct {string assem; Temp_label label;} LABEL;
struct {string assem; Temp_tempList dst, src;} MOVE;
} u;
} *AS_instr;
void AS_print(FILE *out, AS_instr i, Temp_map m);
-
OPER包含:assem:一条汇编语言指令src:操作数寄存器列表(可能为空)dst:结果寄存器列表列表(可能为空)jumps:可能跳转到的目标标签列表- 总是顺序执行到下一条指令的操作的
jumps值为NULL
-
LABEL:程序中跳转可以到达的一个点assem:标签在汇编语言程序中的显示方式label:使用了哪个标签符号
-
MOVE:类似于OPER,但必须仅执行数据传输 -
AS_print(f, i, m):将汇编指令i格式化为字符串并打印到文件fm:临时变量映射,指示每个临时变量的寄存器分配
-
Temp_map:一个键为Temp_temps、值为字符串的表- 一个映射可以覆盖另一个映射
- 如果
σ3 = layerMap(σ1, σ2),这意味着look(σ3, t)将首先尝试look(σ1, t),如果失败,则尝试look(σ2, t) - 这些
Temp_map操作的主要用户为寄存器分配器
Machine-Independence⚓︎
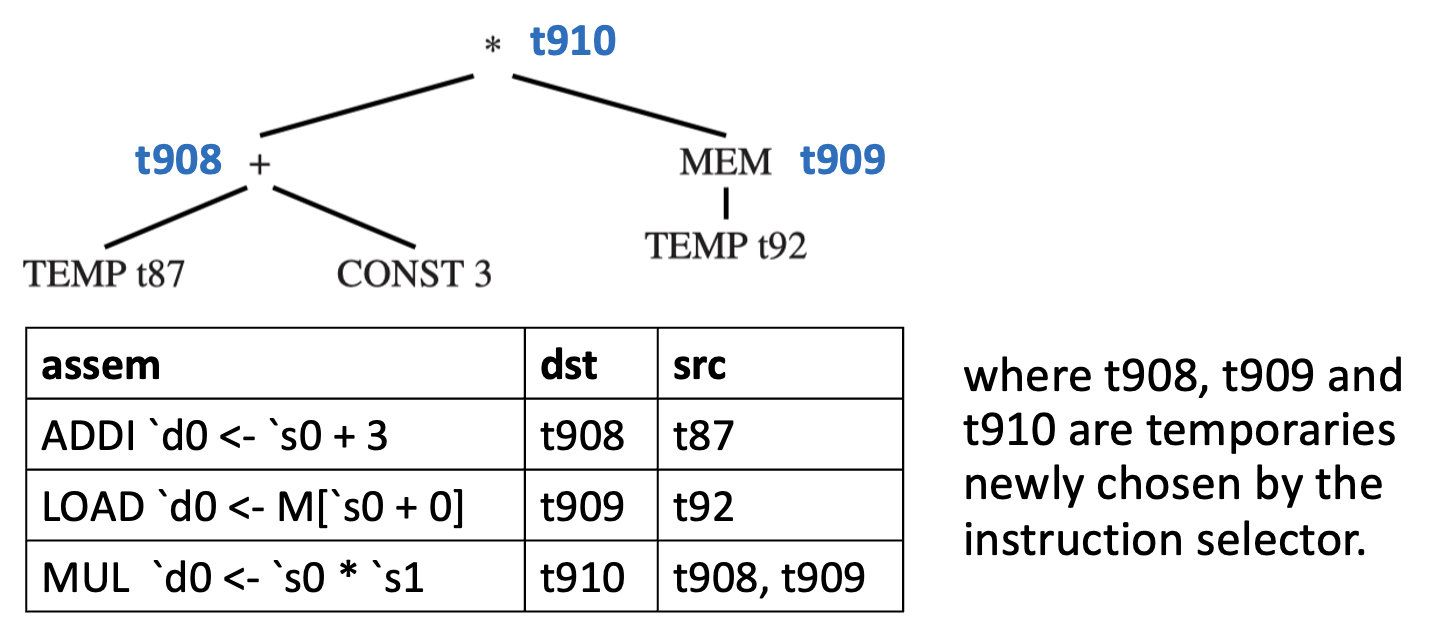
AS_instr类型与所选目标机汇编语言无关。下面使用 Jouette 汇编语言进行说明。
-
实际的 Jouette 汇编语言,在寄存器分配后可能如下所示:
-
Assem指令不了解寄存器分配,它将第一个源寄存器称为`s0,将目标寄存器称为`d0
另一个例子:
注册分配之后,汇编语言可能看起来像这样:
Two-Address Instructions⚓︎
有些机器的算术指令有两个操作数,其中一个操作数既是源又是目标。例如,指令 add t1, t2,其效果为 t1 <- t1 + t2,可以描述为:
| assem | dst | src |
|---|---|---|
add `d0, `s1 |
t1 | t1, t2 |
其中 s0 在汇编字符串中被隐式提及,但未显式提及。
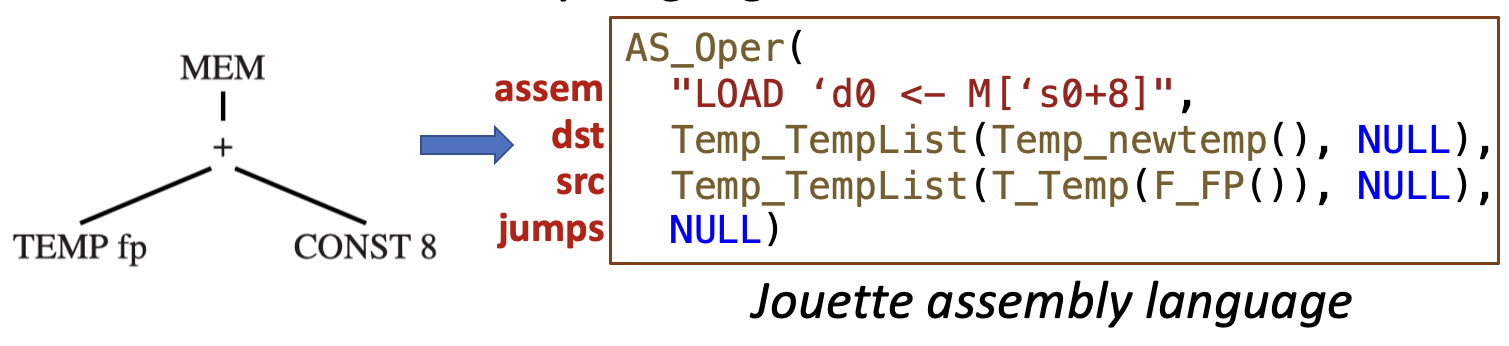
Producing Assembly Instructions⚓︎
函数 munchStm 和 munchExp 将自底向上地地产生汇编指令,作为副作用。munchExp 返回保存结果的临时变量。
static Temp_temp munchExp(T_exp e);
switch(e) //switch tree tiles
case MEM(BINOP(PLUS,e1,CONST (i))): {
Temp_temp r = Temp_newtemp(); //generate a new reg. name
emit(AS_Oper(“LOAD ‘d0 <- M[‘s0+” + i + “]\n”, L(r,NULL),
L(munchExp(e1),NULL), NULL))
//generate instruction text, dst reg. list, src reg. list
static void munchStm(T_stm s);
case MOVE(MEM(BINOP(PLUS,e1,CONST(i))),e2): //switch tiles
emit(AS_Oper(“STORE M[‘s0+” + i + “] <- ‘s1\n”, NULL,
L(munchExp(e1), L(munchExp(e2), NULL)), NULL));
//almost same as munchExp, but no new reg.
/* codegen.c */
...
static AS_instrList iList=NULL, last=NULL;
static void emit(AS_instr inst) {
if (last!=NULL)
last = last->tail = AS_InstrList(inst,NULL);
else
last = iList = AS_InstrList(inst,NULL);
}
emit 函数只是累积一个稍后返回的指令列表。
Procedure Calls⚓︎
- 过程调用:
EXP(CALL(f, args)) - 函数调用:
MOVE(TEMP t, CALL(f, args))
这些树可以匹配诸如这样的覆盖块:
case EXP(CALL(e,args)) {
Temp_temp r = munchExp(e);
Temp_tempList l = munchArgs(0,args);
emit(AS_Oper(“CALL ‘s0\n”, calldefs, L(r,l), NULL));}
-
munchArgs生成代码,将所有参数移至正确位置(寄存器或内存中)munchArgs的整数参数i表示第i个参数munchArgs将对下一个参数递归调用i+1,以此类推
-
CALL指令预期会破坏某些寄存器(调用者保存的寄存器、返回地址寄存器、返回值寄存器) ,这些被破坏的寄存器列表应作为CALL的目标列出 - 通常,任何具有写入其他寄存器副作用的指令都需要进行此处理
Frame Pointer⚓︎
在每次过程调用时,使用帧指针:
- 栈指针寄存器被复制到帧指针寄存器
- 栈指针按新帧的大小增加
虚拟帧指针
- 节省时间(无需复制指令)和空间(多一个寄存器可用于其他目的)
- 代码生成函数必须将对
FP + k的任何引用替换为SP + k + fs,其中fs是帧大小
评论区