Lec 8: Physical Storage Systems⚓︎
约 5497 个字 预计阅读时间 27 分钟
核心知识
感觉这章内容不是特别重要,很多都是计组讲过的东西,不太想整理了 hh
引入
从这一讲开始,我们进入到 DB 课程下半部分的学习了。回忆一下,在上半部分,我们主要介绍的是数据库的数学基础和应用,比如关系代数、SQL 语法等等,这些知识都是数据库中面向用户的高层级的逻辑部分。
而在下半部分,我们将学习“数据库系统”中的“系统”部分(所以读者会发现里面的部分内容会和 CO 或 OS 课程重叠,但没有学过的话问题也不大
Overview of Physical Storage Media⚓︎
先给出一张和数据库相关的存储设备层级图:
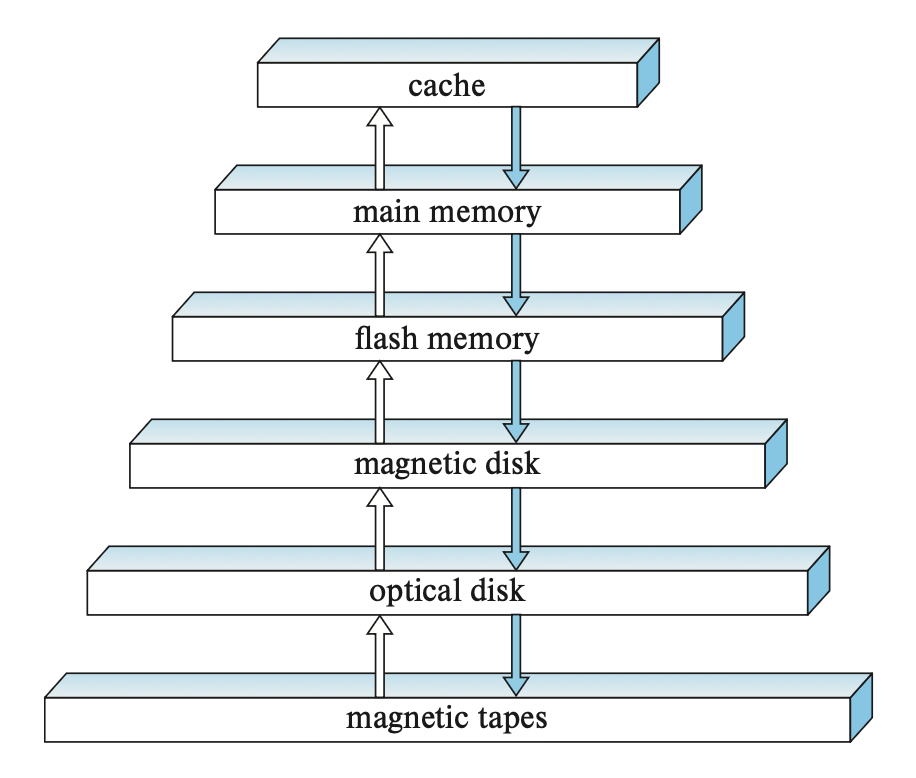
和计组学过的存储器层级几乎一样 hh
- 高速缓存(cache)
- 速度最快,但成本也是最贵的
- 在数据库系统中,我们一般不会考虑高速缓存的选择。但是在设计和查询处理相关的数据结构和算法时,还是得要注意高速缓存的影响
- 主存(main memory)
- 和数据相关的操作(由机器指令执行)都是在主存上进行的
- 一般情况下,对于超大的数据库,主存肯定是放不下的;但有些中小型的数据库是可以直接放在主存中的
- 主存具有易失性(volatile)——当断电或系统崩溃时,主存里的内容就会丢失
- 闪存(flash memory)
- 闪存具有非易失性(non-volatile)——断电或故障不会导致数据的丢失
- 常用于相机、智能手机等设备中
- 基于闪存实现的存储器:U 盘、固态硬盘(solid-state disk, SSD)(提供和磁盘类似的接口,使得数据可以被按块存储或检索,因而称为面向块的接口(block-oriented interface))
- 磁盘(magnetic-disk storage)
- 同样具备非易失性
- 要访问磁盘的数据比较麻烦:首先系统要将数据从磁盘移到主存上能被访问的地方;当系统执行完指定操作后,修改后的数据必须写回到磁盘中
- 磁盘的容量正不断扩大,且成本也在逐年降低
- 光学存储器(optical storage)
- 包括:DVD(digital video disk)、蓝光 (blu-ray) DVD
- 有些 DVD 仅支持读取;而有些 DVD 可以支持写一次,但之后就不得覆写了(称为写一次,读多次(write-once, read-many, WORM) 磁盘
) ;而有些可以支持多次重写 - 光驱(optical disk jukebox)
- 磁带存储器(tape storage)
- 一般用于备份和存储归档数据 (arcival data)(通常基于一些合法的理由,必须在长时间内被安全存储的数据)
- 最便宜的存储器类型
- 但由于是按顺序访问(sequential-access) 数据的,所以访问速度超慢。而前面介绍的磁盘和 SSD 都支持随机访问(random-access),即可以读取任意位置上的数据
- 磁带的容量可以很大(高达几 TB)
根据这些存储器的速度、成本、可靠性等指标,我们可以将它们分为以下几类:
- 一级存储器(primary storage):高速缓存、主存
- 二级存储器(secondary storage)/在线存储器(online storage):闪存、磁盘
- 三级存储器(teriary storage)/离线存储器(offline storage):光学存储器、磁带
更现代的存储层级划分(推荐阅读)
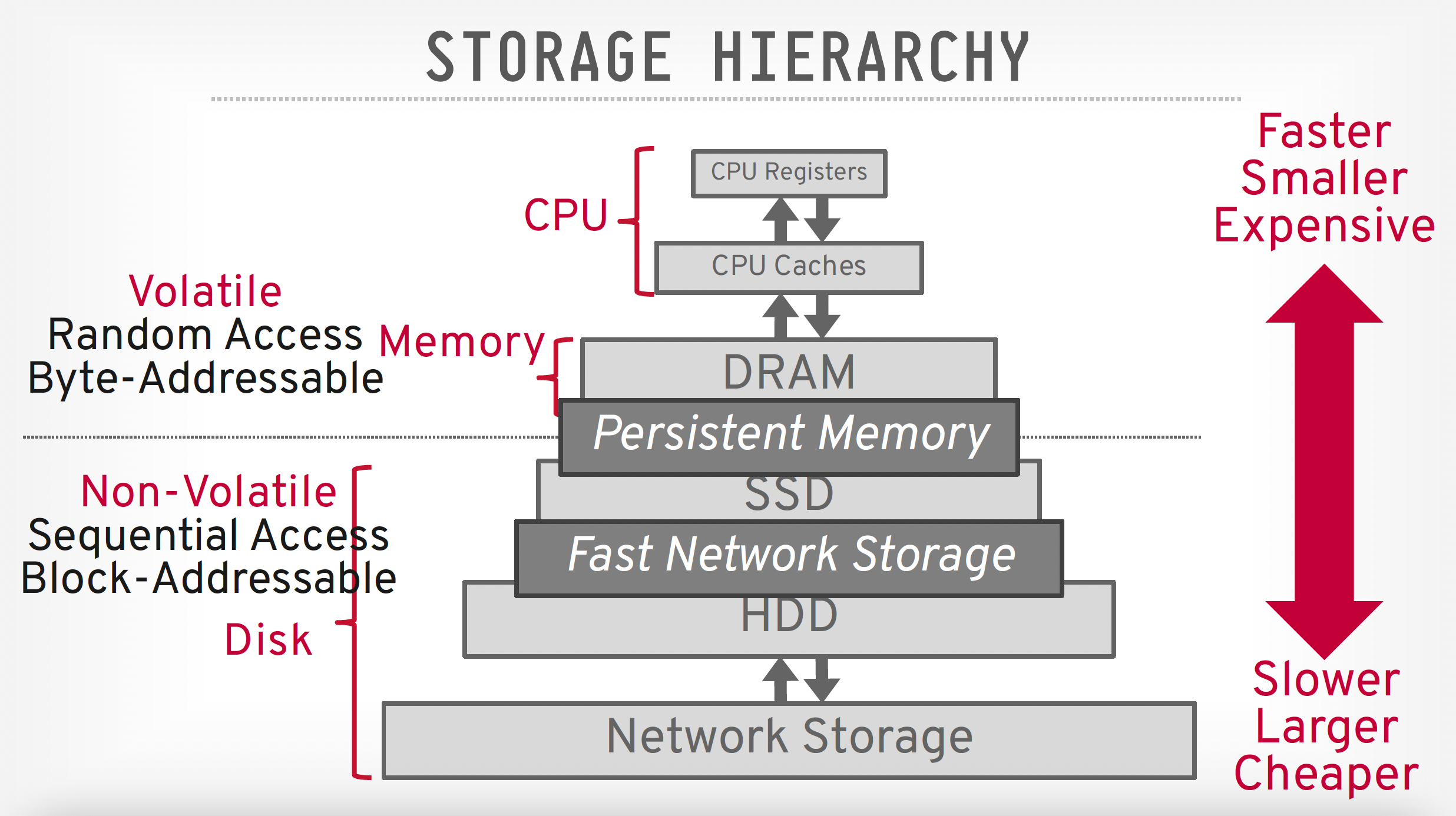
- 易失性设备:断电后数据丢失
- 支持字节可寻址位置,实现快速随机访问,也就是说程序可以跳转到任何字节地址上面读取数据
- 为了便于讨论,我们一般将其指代为“内存”
- 非易失性设备:无论有没有断电,数据都会被保留下来
- 它是块 / 页可寻址的。为了读取特定偏移量上的值,程序必须先将 4KB 的页加载到内存中,然后保存程序需要读取的值
- 它在顺序访问中表现更好
- 为了便于讨论,我们一般将其指代为“硬盘”,且不会区分 SSD 和 HDD(spinning hard drives)
可以看到,有一类称为持久内存的特殊存储设备,它既具备 DRAM 的速度,也有硬盘的持久性。但在课程中,我们不会考虑这种存储设备。它的典型代表是 Intel 的 Optane(但在 2022 年停产了)
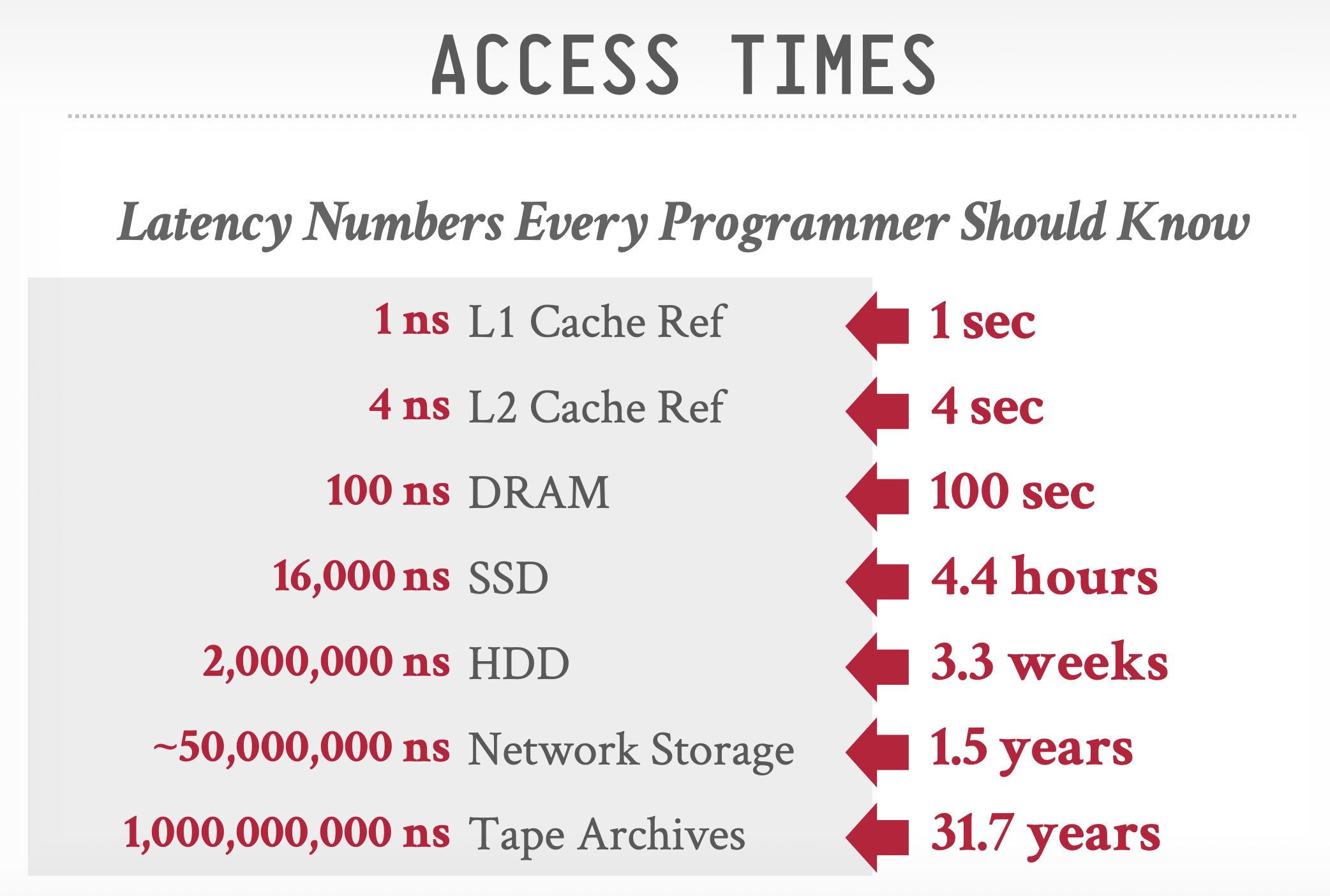
各种存储设备的访问时间比较
Storage Interfaces⚓︎
- 串行 ATA (Serial ATA, SATA)
- 串行连接 SCSI (Serial Attached SCSI, SAS)
- 非易失性内存主机控制器接口规范 (Non-Volatile Memory Express, NVMe)
- 存储区域网络 (storage area network, SAN)
- 网络附属存储 (Network attached storage, NAS)
- 云存储 (cloud storage)
对我来说就是一堆乱七八糟的名词——除了最后一个外,一个都没见过🤓,所以不想整理了 ...
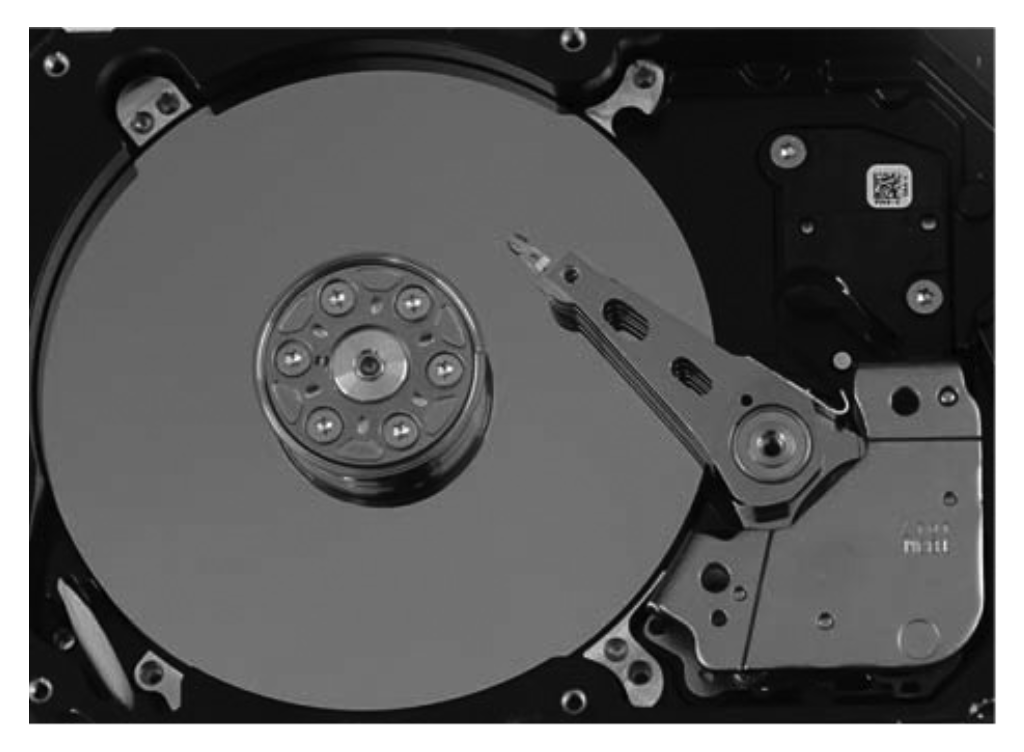
Magnetic Disks⚓︎
磁盘实物图:
Physical Characteristics⚓︎
磁盘的模型图如下所示:
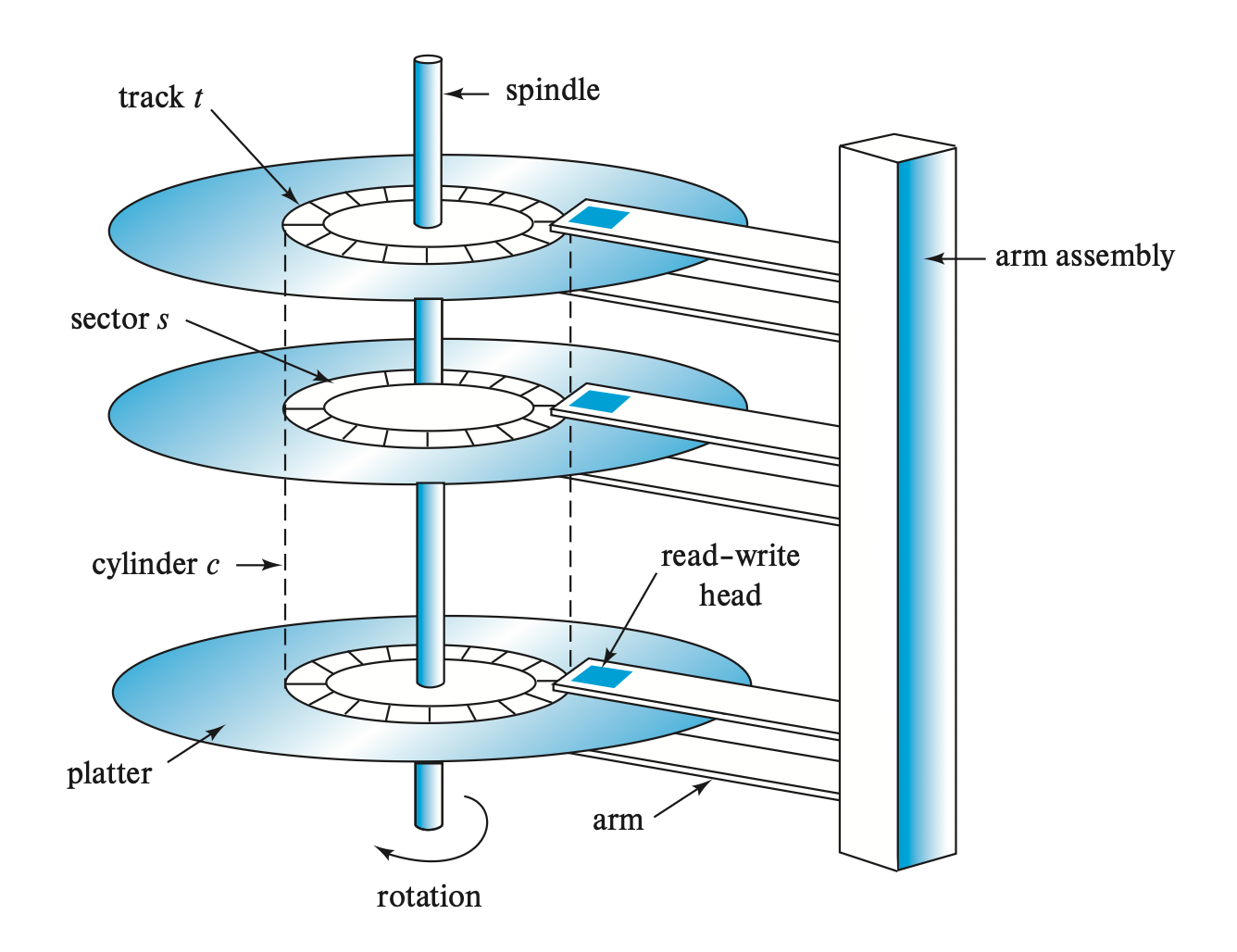
磁盘由以下几部分组成:
- 一组盘片(platters)。每张盘片用刚性金属或玻璃制成,且两面都有磁性材料,用于记录信息
- 驱动器马达和转轴 (spindle)
-
逻辑上,磁盘表面被划分为多个磁道(track),磁道又被划分为多个扇区(sector),而扇区是磁盘读写信的最小信息单元
- 内圈磁道的长度比外圈更短,因而外圈磁道包含更多的扇区
-
每个盘片的表面上方都有一个读写头(read-write head),可以在不同磁道上移动
- 而读写头被安装在磁盘臂(disk arm) 上
- 读写头离表面越近,记录密度就会越大
- 有时可能因为读写头的故障导致整个磁盘的损毁,比如读写头刮坏盘片表面,破坏了其中的数据等等
-
因为所有盘片上的读写头是一起移动的,也就是说当某个盘片上的读写头移到第 i 个磁道上的时候,其他读写头也会在各自盘片的第 i 个磁道上,因而称所有盘片的第 i 个磁道为第 i 个柱面(cylinder)
- 磁盘控制器(disk controller) 连接了计算机系统和磁盘驱动器,它接受对某个扇区的读 / 写命令,然后发起操作(比如让磁盘臂移动到指定的磁道上等等)
- 此外,控制器还会向扇区写入校验和(checksum),由于检查数据有无损毁。如果发现错误的话,控制器会尝试重新读取;如果多次无效后,则发出读取失败的信号
- 控制器还负责将坏掉的扇区重新映射,即从逻辑层面上将坏掉的扇区映射到不同的物理位置上(通常是空闲的扇区)
Performance Measures⚓︎
要判断一个磁盘的性能,我们主要会衡量容量、访问时间、数据传输率和可靠性这些指标。
- 访问时间:从发起读 / 写请求,到数据传输开始的这段时间,包括以下两部分:
- 寻道时间:寻找指定磁道所需的时间(重新定位磁盘臂的时间)
- 平均寻道时间:如果假设所有磁道的扇区数相等,那么平均寻道时间 = 1/3 * 最坏情况下的寻道时间
- 旋转时延:等待读写头找到指定扇区的时间
- 平均时延:一般情况下等于旋转半圈所需的时间
- 寻道时间:寻找指定磁道所需的时间(重新定位磁盘臂的时间)
- 数据传输率:数据被检索或被存储时的速率
- 磁盘 I/O 的请求通常由文件系统,或直接由数据库系统发起。请求中会包含需要被引用的地址,即块号(block number)(“块”(block) 即为存储分配和检索的逻辑单元
) 。 - 请求可以分为顺序访问模式和随机访问模式
- 顺序访问(sequential access):连续的请求针对连续的块号,通常在相同或邻近磁道上。所以对于这样的请求,我们只考虑寻找第一块时的寻道时间,之后就不用考虑了;自然,数据传输率也很高
- 随机访问(random access):连续的请求针对随机的块号,所以对每个请求都要计算寻道时间,所以速度上肯定不如前者
- 可以用每秒 I/O 运算数(I/O operations per second, IOPS) 来衡量表现,它取决于访问时间、块的大小和数据传输率
- 磁盘 I/O 的请求通常由文件系统,或直接由数据库系统发起。请求中会包含需要被引用的地址,即块号(block number)(“块”(block) 即为存储分配和检索的逻辑单元
- 平均无故障时间(mean time to failure, MTTF):系统能够连续运行,不发生故障的平均时间,用于衡量磁盘的可靠性
- 不少商家会用新产的磁盘来虚标 MTTF,实际上磁盘用的越久,越容易出故障
Flash Memory⚓︎
闪存分为两类:NOR 闪存和 NAND 闪存,通常用的是后者。
读取闪存数据时需要读取一整个页(page)(通常是 4 KB
固态硬盘(SSD) 基于 NAND 闪存构建,并提供了和磁盘相同的面向块的接口。相比磁盘而言,SSD 的随机访问速度更快,数据传输率更高(但受连接技术的限制
闪存的写操作相对比较复杂。执行写操作时,一整个页的数据都不能被直接覆写,而是需要先擦除 (erase),再重写,而且这个擦除操作需要在多个页上同时进行(这些页称为擦除块(erase block)
闪存的性能除了受限于较慢的擦除速度外,还受限于将逻辑页号映射到物理页号的更新速度。当逻辑页更新时,它会被映射到任意被擦除的物理页上,且它的原始位置在随后会被擦除,并被标记为删除。为了更快的访问,这种逻辑页到物理页的映射还会在内存中复制一份,称为转换表(translation table)(类比虚拟内存中的 TLB
为了让闪存用的更久,闪存会采取一种磨损均衡(wear leveling) 的机制:对于被擦除多次的物理页,它会被赋予一个“冷数据”,即不怎么更新的数据;而对于擦除次数不多的物理页,则被赋予一个“热数据”,即更新频繁的数据。这样就可以实现闪存页擦除操作的分摊了。
上述操作均由一个称为闪存转换层(flash translation layer) 的软件层实现,它使得从文件系统和数据库系统的视角来看闪存时,和硬盘几乎一模一样,除了速度更快些。
闪存的性能通常用以下指标衡量:
- 每秒随机读取块数(number of random block reads per second)
- 不同于磁盘,SSD 支持并行的多次随机访问请求,一般支持 32 个并行请求(QD-32)
- 顺序读 / 写的数据传输率(data transfer rate)
- 每秒随机写入块数(number of random block writes per second)
有一类叫做混合硬盘驱动器(hybrid disk drive) 的硬盘系统,将磁盘和少量的 SSD(作为缓存)结合起来,其中被频繁访问,且不怎么更新的数据放在 SSD 里。
RAID⚓︎
某些应用程序对数据存储的要求很高,不仅要存储大量数据,还要确保高效的数据读写速度以及可靠性。这时,我们就要用到一种名为独立硬盘冗余阵列(redundant arrays of independent disks, RAID) 的硬盘组织技术,它能够实现上述目标。
Improvement of Reliability via Redundancy⚓︎
先来考虑 RAID 对可靠性(reliability) 的提升——通过冗余(redundancy),即存储一般情况下用不到的,但会在硬盘故障后恢复损失信息时用到的冗余信息。这样即使某个硬盘发生故障,数据也不会丢失,从而提升了 MTTF。
最简单的实现方法是复制每一个硬盘,这种技术称为镜像(mirroring/shadowing)。此时,一个逻辑硬盘包括了两个物理硬盘,每次写入数据时都要同时写到两个硬盘上。如果有一个硬盘出故障了,那么就会从另一个硬盘中读取数据。只有当第二个硬盘在第一个出故障的硬盘被修复前出故障时,数据才会丢失。
对于镜像硬盘,MTTF 除了取决于单个硬盘的 MTTF 外,还要考虑平均修复时间(mean time to repair),即恢复故障硬盘内的数据所需的时间。此外,我们还会考虑一个叫做平均数据无损失时间(mean time to data loss) 的指标。
但这种方法还是没法应对断电或自然灾害这些问题,并且随着硬盘老化;出故障的概率会更大。现在我们来考虑断电的情况:在向镜像硬盘写入数据的过程中发生断电的话,那么可能会导致两个硬盘的相同块数据之间的不一致。解决方法是先写入一份拷贝,再写入另一份拷贝,这样两份拷贝中的一份一定是一致的(?没看懂
Improvement in Performance via Parallelism⚓︎
再来考虑 RAID 对性能的提升——支持对多个硬盘的并行(parallel) 访问。此外,RAID 采用数据分条(striping data) 的方法来提升传输速率。
- 最简单的形式是位级分条(bit-level striping):将多个硬盘的字节数据划分为位 (bit)
- 举例:假如有八个硬盘,我们将字节中的第 i 位写入到第 i 个硬盘上,这样的话每次访问数据需要八个硬盘同时参与。相比单个硬盘,在访问次数不变的情况下,这种方法可以读取八倍的数据。
- 更常用的形式是块级分条(block-level striping):将一组硬盘看作单个的大硬盘,且为每个块赋予一个逻辑编号(从 0 开始
) 。第 i 号逻辑块会被放在第 (i mod n) + 1 号硬盘上的第 \(\lfloor \dfrac{i}{n} \rfloor\) 个物理块上。- 相比位级分条,块级分条的优势是支持每秒更大块数的读取,以及更低的时延,因此位级分块几乎在实践中不会被用到
总结一下,硬盘系统的并行实现了以下两个主要目标:
- 实现多次小型数据访问的加载平衡,从而提升访问的吞吐量
- 将大型数据访问并行化,从而降低响应时间
RAID Levels⚓︎
镜像虽然可靠,但成本昂贵;分条虽然提供更高的数据传输速率,但没有提升可靠性。因而产生了一种替代方案:结合硬盘分条和奇偶校验块(parity block)。具体来说,将 RAID 系统里的块划分为多个组,每个组都有一个奇偶校验块,它的第 i 位即组内所有块的第 i 位进行 XOR 运算的结果。如果组内的某个块因为故障而丢失数据的话,那么可以通过对剩余块 + 奇偶校验块的 XOR 运算来回复这个块的数据。当任何块的数据被更新时,就必须要重新计算奇偶校验位,并将结果写入到奇偶校验块中。
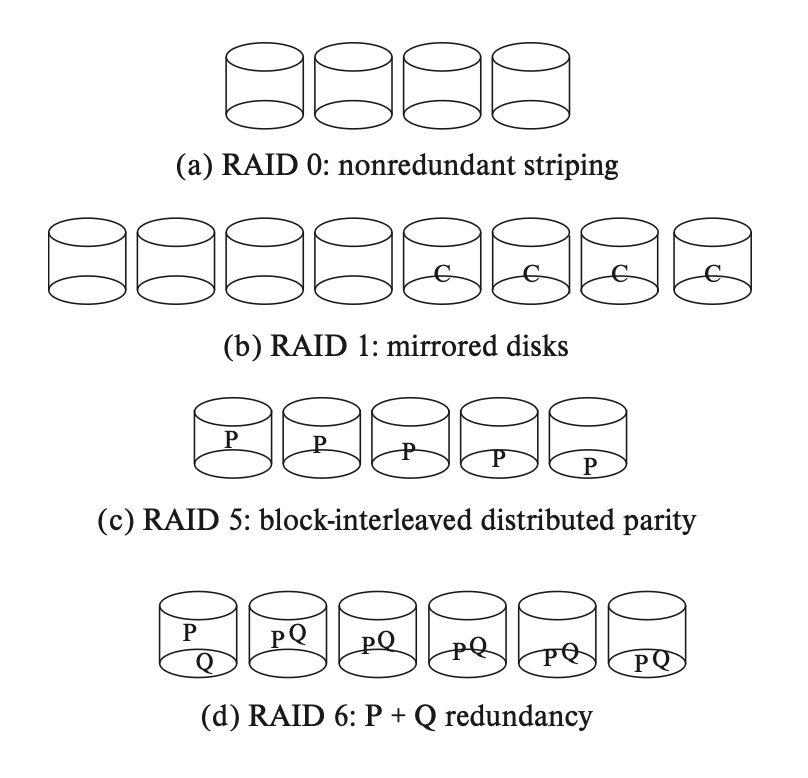
根据上述介绍的技术,我们将其分为多个 RAID 等级:
注意
由于 RAID 2, 3, 4 这三种技术一般不会出现在实际应用中,故这里不会介绍。
- 0 级 RAID:块级分条
- 1 级 RAID:硬盘镜像 + 块级分条
- 有些商家会用 RAID 1+0 或 RAID 10 来指代这种技术,而 RAID 1 则表示没有块级分条的硬盘镜像技术
-
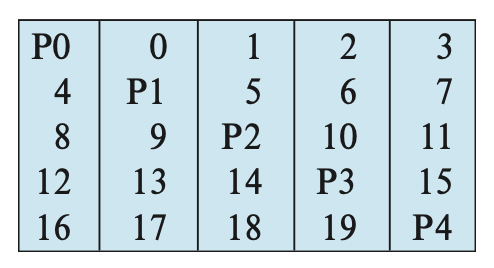
5 级 RAID:块级交错分布奇偶校验(block-interleaved distributed parity)。数据和奇偶校验被划分到 N + 1 个硬盘上,对于每组的 N 个逻辑块,其中一个硬盘用于存储奇偶校验块,剩下 N 个硬盘存储数据块。这样的话,奇偶校验块会被存储在不同组的不同硬盘上,因而所有的硬盘都要参与到读取请求
- 上图中,P 表示奇偶校验块。假如有 5 个硬盘,奇偶校验块 Pk 来自于逻辑块 4k, 4k+1, 4k+2, 4k+3 上。下图展示了前 20 个块的分布:
-
6 级 RAID:P + Q 冗余。类似 RAID 5,但是会多用一个硬盘存储额外的冗余信息,计算的不是奇偶校验位,而是纠错码(error-correcting codes),可以容忍两个硬盘的故障。
Hardware Issues⚓︎
前面介绍的 RAID 技术属于硬件 RAID,实际上也有软件 RAID,但相比硬件 RAID 更麻烦,因为它在出故障前需要一些额外的检测工作,比如对所有磁盘进行扫描等。
但硬件 RAID 在使用过程中也会有不少问题,比如:即使正确完成写入数据的操作,但之后可能就没发在这个扇区中读取数据了,这样导致的数据损失称为潜在故障(latent failure) 或比特腐烂(bit rot)。如果这种故障被及时检测到的话,那么还能从其余硬盘中恢复数据;如果未能及时检测到,那么数据就真的丢掉了。
为了减少这样的损失,一种解决方案是执行擦洗(scrubing) 操作,即当硬盘空闲时,读取每个硬盘的每个扇区,如果发现有扇区无法被读取,那么就从其余硬盘中恢复数据,然后写回到这个扇区上;如果扇区出现物理损坏的话,还需要将逻辑扇区地址重新映射到不同的物理扇区上。
一些硬件还支持热交换(hot swapping),就是在不断电的情况下,移除出故障的硬盘,并用新的来替代,从而减少了平均修复时间。
电力供应、硬盘控制器,乃至 RAID 系统连接都可能成为 RAID 系统单点故障的来源。为了避免这些问题,好的 RAID 实现会采用多个备用电源,多个硬盘接口和连接等措施。
Choice of RAID Level⚓︎
挑选 RAID 等级时需要考虑以下因素:
- 额外硬盘存储需求的金钱成本
- 关于每秒 I/O 操作数的性能需求
- 硬盘故障时的性能
- 重构数据(将数据从故障硬盘上重构到新的硬盘上)时的性能
- 在高性能的数据库系统中,当数据需要连续的可用性时,重构性能(rebuild performance) 是一个重要的考虑因素。同时,因为重构对修复时间有很大的影响,因此重构性能也会影响到数据无损失的时间
- 1 级 RAID 的实现最为简单
下面简单讲一下不同等级的 RAID 的适用情况:
- 0 级 RAID:当数据安全不那么关键,且需要高性能的少数场景
- 1 级 RAID:适用于存储日志文件的应用(因为它的写操作性能最好
) ,以及对随机 I/O 的高需求 - 5 级 RAID:数据需要频繁读取,但写入较少的情况
- 6 级 RAID:可靠性最佳,因而适用于数据安全非常重要的情况下
Disk-Block Access⚓︎
我们知道,一般情况下都是以块(block) 为单位来访问硬盘内的数据。下面介绍一些通过减少(随机)访问次数来提升访问速度的技术:
- 缓冲区(buffering):从硬盘中读取的数据块会被临时存在内存的缓冲区中,以满足未来的访问需求。缓冲区由操作系统和数据库系统同时实现。
- 超前读取(read-ahead):访问磁盘中某个数据块时,会将位于同一磁道上的连续的一组块同时读到缓冲区中,即使这些块之后不会被读到。这种方法在顺序访问时非常有用,因为需要读取的块已经位于内存中了,这样就减少了寻道时间和旋转时延。但是在随机访问时就没什么作用了。
- 调度(scheduling):这里主要讲的是磁盘臂调度算法(disk-arm scheduling algorithm)——尝试将所有访问按照磁道顺序排序(磁盘臂从内圈开始向外移动,访问到最外圈后就按反方向回到最内圈
) ,这样就能增大能够被处理的访问次数。- 磁盘控制器实现了对访问请求的重新排序,它会将请求放在一个队列中,返回结果的顺序可能和队列顺序不同
- 这种算法类似电梯算法(elavator algorithm)。
- 文件组织(file organization):将硬盘中的块按照我们期望访问的情况来组织
- 分段(fragmented):数据块分散在多个硬盘中。为了减少分段的出现次数,系统需要为数据备份,并将数据恢复到整个硬盘上
- 非易失性写缓冲区(non-volatile write buffers):
- 使用非易失性随机访问内存(non-volatile random-access memory, NVRAM) 加速硬盘写操作
- 当数据库系统 / 操作系统发起向磁盘写入块的请求时,磁盘控制器向非易失性写缓冲区写入块,并立即告诉操作系统完成了写操作;之后磁盘控制器将用一种最小化磁盘臂移动的方式向磁盘写入数据
评论区