Chap 6: Registers and Register Transfers⚓︎
约 7304 个字 预计阅读时间 37 分钟
核心知识
- 寄存器的基本结构
- 寄存器传输
- 几种实现:
- 专用 MUX
- 总线:共用 MUX、三态门
- 几种实现:
- 微操作
- 算术
- 逻辑
- 移位:关注移位寄存器的实现 ( 串行、并行 )
- 计数器
- 行波计数器
- 同步计数器
- 双向计数器
- 模 N 计数器:比如 BCD 码计数器
- 寄存器单元设计
Registers and Load Enable⚓︎
引入
当 n 很大时,状态和输入组合的数量将随之变大,此时用状态图 / 状态表模型的表示就不太现实了。所以,我们用寄存器传输层级 (Register Transfer Level, RTL) 设计模型来描述复杂电路的大量状态。在 RTL 设计方法中,通过不同类型的寄存器和组合电路来构建基本块,实现时序逻辑电路的设计。
大型数字系统的设计往往采用模块化 (modular)、分层 (hierarchical) 的方法,将系统划分为一些子系统或模块,包括寄存器、计数器、译码器、多路复用器、总线、算术元件、触发器和基本门等。
可将这一节视为时序逻辑电路的延伸。
n 位寄存器 (register) 由一组触发器和组合逻辑门构成,用来实现多位数据的存储等操作
- n 位触发器保存一位或多位数据
- 组合逻辑门对数据进行加工
计数器 (counter):随着时间脉冲的变化,不断在某个固定序列内循环“扫描”的一种寄存器
寄存器和计数器都是时序函数块 (sequential functional blocks)
- 寄存器主要用于存储和操纵信息
- 计数器主要用于序列和控制操作
Example

这里多了一个清除输入\(\overline{Clear}\),用于在正式运行前的初始化 ( 寄存器的所有值均置 0),当 \(\overline{Clear} = 0\) 时,对触发器进行异步复位。在正常运行时,\(\overline{Clear}\) 应保持 1,除非需要复位。这个输入是可选的。
寄存器能在每个时钟周期里加载 (loading)信息:将新的信息传输至寄存器内。如果加载操作在同一时钟脉冲内完成,称之为并行完成。
加载 (load):控制寄存器的存储和加载的信号:
- load = 1:加载数据输入的值
- load = 0:将值存储至寄存器内
寄存器的符号:

注:由于 Clear 写在方框内部,且外部有个圆圈,因此 Clear 没有取反;但如果 Clear 写在外面,就需要写成 \(\overline{Clear}\)
为了更合理地存储或加载信息,寄存器需要用控制信号实现人为的控制,实现方法如下:
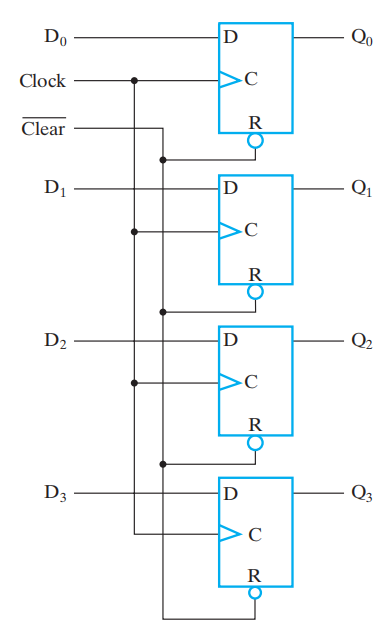
Registers with Clock Gating⚓︎
主时钟生成器 (master clock generator):提供一个应用于所有触发器和寄存器的时钟脉冲
门控时钟 (clock gating):控制时钟的使用,其中的 \(Load\) 相当于时钟的使能信号,起到“开关”的作用
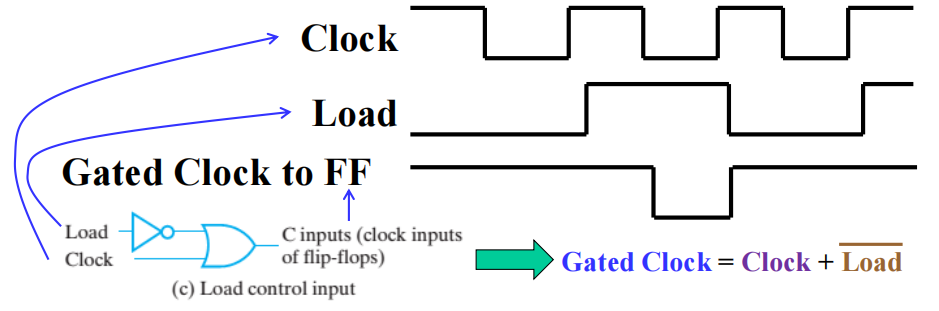
此时控制信号 \(C = Clock + \overline{Load}\)
- 当 \(Load = 0\) 时,\(C = 1\),时钟信号失效,寄存器保持原来的数据
- 当 \(Load = 1\) 时,\(C = Clock\),时钟信号生效,寄存器加载新数据
可能的问题
由于门延迟的问题 ( 上面例子中的非门 ),因而整个电路出现了时钟偏移 (time skew),即在同步时序电路中,相同的源时钟信号在不同的时间里到达不同的元件中,这是应当需要避免的问题。因此,我们将采用下面的方法来解决。
Registers with Load-Controlled Feedback⚓︎
解决方案:
- 保持时钟的连续运行
- 用一个加载控制,在原数据和新数据之间进行选择,即是要保持数据还是加载数据 ( 类似一个 2-1 MUX) 电路实现:

- \(EN = 0\) 时,\(D = Q\),也就是保持之前的值
- \(EN = 1\) 时,\(D\)加载新的值
这种电路被称为带使能的 D 触发器 (D flip-flop with enable),可避免时钟移,所以更推荐这个方案。
🌰:带有并行加载的 4 位寄存器
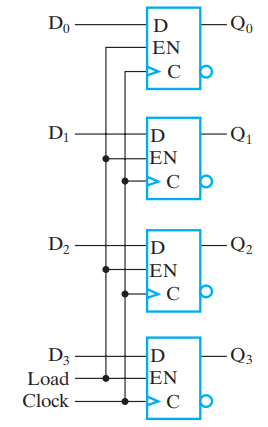
之所以说是“并行加载”的,是因为每个触发器均由一个 \(Load\) 信号控制,因此要么同时保持 4 位数据,要么同时加载 4 位数据
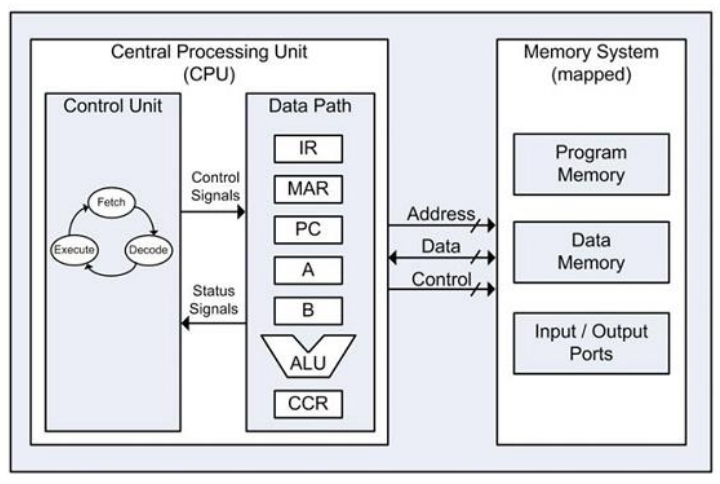
Datapath and Control Signals⚓︎
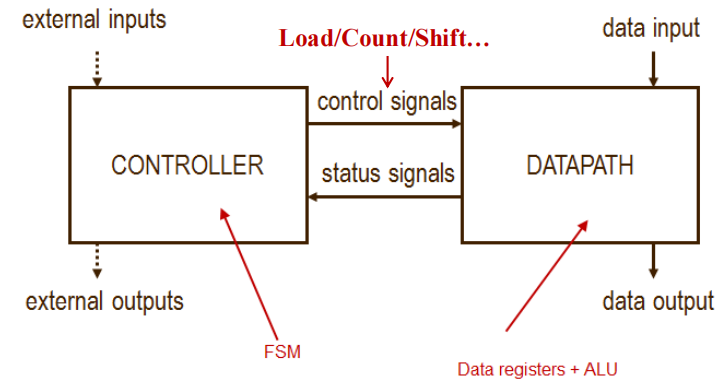
- 数据通路 (datapath) 是执行数据加工操作 ( 寄存器传输和微操作 ) 的一组函数单元 ( 比如 ALU, MUX),寄存器和总线
- 控制单元 (control unit) 产生控制信号,告诉数据通路要做什么 ( 决定操作序列 )
Register Transfer Operations⚓︎
寄存器传输操作 (register transfer operations):对存储于寄存器内的数据进行移动和加工操作,它由以下部分组成:
- 一组寄存器
- 微操作 (microoperations):对存储于寄存器内的数据进行的基本操作,比如加载 (load)、计数 (count)、移位 (shift)、加 (add)、按位或 (bitwise OR),等等
- 控制操作:监督系统的操作序列
寄存器传输语言 (register transfer language, RTL):一种用于描述寄存器传输中的逻辑行为的语言
表示寄存器的图形化符号:

RTL 中的常用表示法:

注
- 特殊意义的字母:
- AR:地址寄存器 (address register)
- PC:程序计数器 (program counter)
- IR:命令寄存器 (instruction register)
- n 位寄存器,标号为 0~n-1,默认 0 标在最右边,从右往左标号,这种顺序被称为小端序 (little-endian),相反的顺序 ( 即 0 在最左边,从左往右标号 ) 被称为大端序 (big-endian)
- 看到上方图 (d):我们用 L 表示低阶字节 0\(\sim\)7,用 H 表示高阶字节 8\(\sim\)15。PC(L) 可以写成 PC(7:0),PC(H) 可以写成 PC(15:8)
- R1 \(\leftarrow\) R2 表示将 R2 的副本值传输给 R1,其中 R2 被称为源 (source),R1 被称为目的地 (destination)
- 时钟不在寄存器传输操作的讨论范围内
条件传输 (conditional transfer)
控制表达式 (control expression) 具体说明了运算的逻辑条件:
- if 控制表达式 == 逻辑
1\(\rightarrow\) 执行运算 - if 控制表达式 == 逻辑
0\(\rightarrow\) 不执行运算
If (K1 = 1) then (R2 \(\leftarrow\) R1) 可以简记为: $$ K1: (R2 \leftarrow R1) $$ 其中K1为控制变量,具体说明微操作的条件执行
图示:
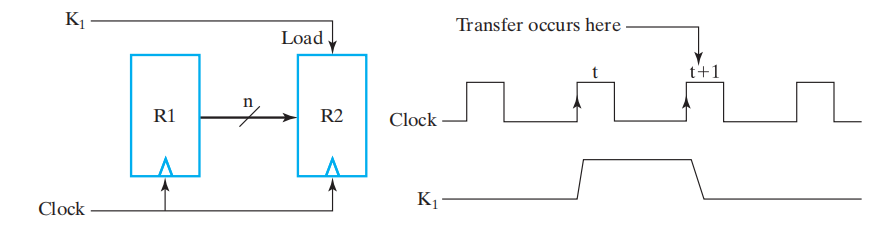
而 \(K3: R2 \leftarrow R1, R1 \leftarrow R2\) 表示同时交换R1 和 R2 的值
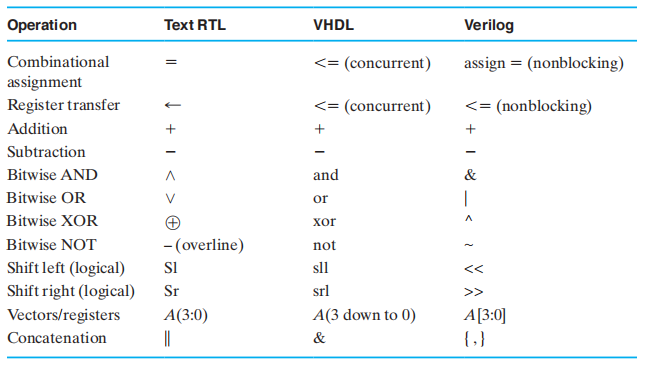
RTL, VHDL 和 Verilog 的寄存器传输符号
Microoperations⚓︎
微操作 (microoperation) 的 4 种类型:
- 传输 (transfer):将数据从某个寄存器转移到另一个寄存器内
- 算术 (arithmetic):对寄存器内的数据执行算术运算
- 加法 +
- 减法 -(一般用补码实现,具体操作见 Chap 3)
- 乘法 *
- 除法 /
- 逻辑 (logic):执行按位逻辑运算
- 逻辑或 \(\vee\)
- 逻辑与 \(\wedge\)
- 逻辑异或 \(\oplus\)
- 非 ( 取反码 ) \(\overline{X}\)
- 移位 (shift):对寄存器内的数据进行移位
具体描述
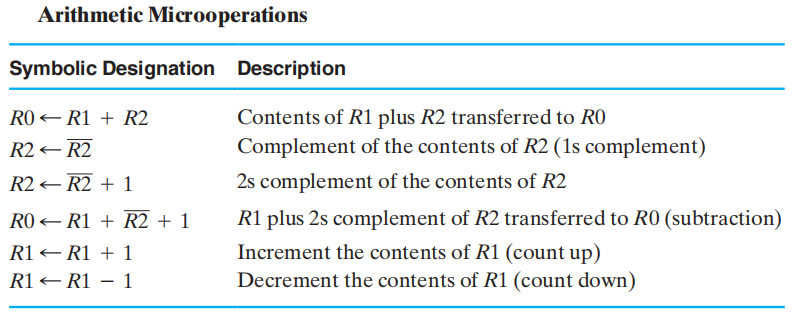
注:关注第 2,3 行 ( 反码、补码的表示 )
加减法器
回顾 Chap 3 的加减法器设计
注:\(X\) 决定运算模式 (0:加法,1:减法 ),\(K1\) 为使能信号
电路实现:
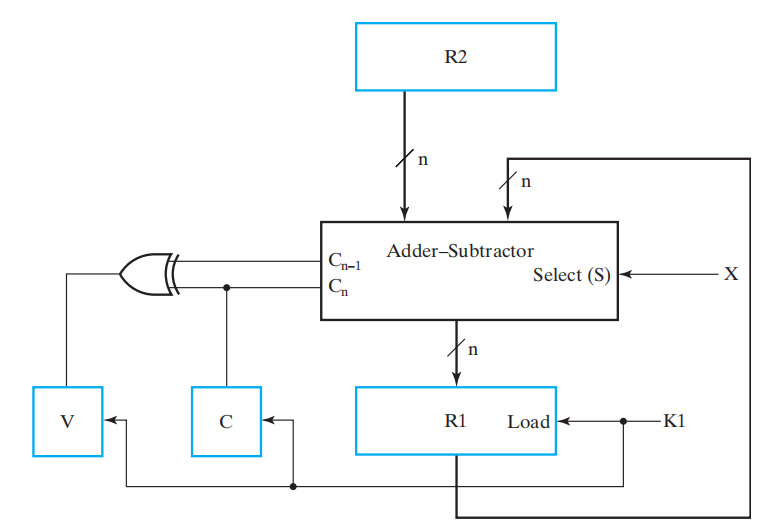
注:溢出 ( 即最高位的进位 )输出会被传输到 V 中 ( 一个触发器 )( 前提是 K1 = 1)
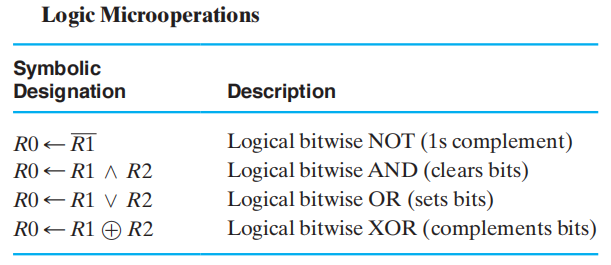
注:对于 n 位的寄存器,一个逻辑微操作需要的门的数量为 n 个
Example
注:
- 条件中出现的 '+' 表示“或”运算
- 而 \(R1 \leftarrow R1 + R3\) 中的‘+’表示“加法”微操作
- 用 '\(\vee\)' 表示“或”微操作
- 逻辑与:
我们仅保留了R1的低位部分,高位部分均变成0

- 逻辑或:
我们仅保留了R1的低位部分,高位部分均变成1

- 逻辑异或:R1 的低位部分得到保留,而高位部分全部取反

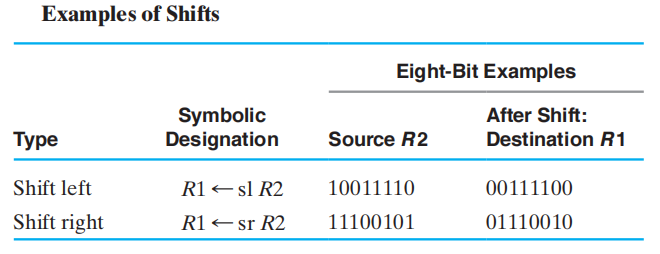
- 具体实现方法见移位寄存器一节
- 移位往往用到“0 填充 (zero fill)”:左移 - 右边补 0,右移 - 左边补 0。这样的位被称为进入位 (incoming bit)
- 移出去的位一般就抛弃掉,这种位被称为移出位 (outgoing bit)
- 有时,需要用 1 个单独的触发器提供要移位的数据,或者获取移位后的数据
- 还有更复杂的移位(翻转,算术运算……
) ,这里就略过了 - 还可以实现多个位的移动,如果通过 1 个变量指定移动的位数,称该变量为移位量 (shift amount)
Register Transfer Structures⚓︎
类别:
- 基于多路选择器的传输 (multiplexer-based transfer):由单个 MUX,从多个输入中进行挑选
- 基于总线的传输 (bus-based transfer):由一个共用的 MUX( 它驱动一条向多个寄存器提供输入的总线 ) 从多个输入中进行挑选
- 三态总线 (three-state bus):由一个三态门驱动器 ( 其输出与供给多个寄存器的总线相连接 ) 从多个输入中进行挑选
Multiplexer-Based Transfers⚓︎
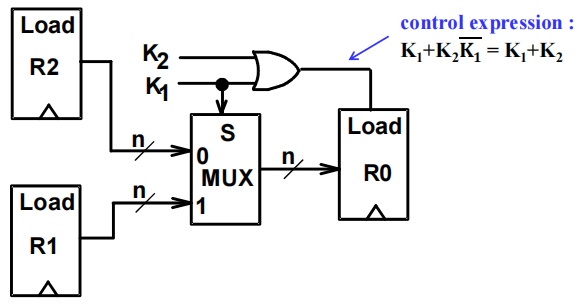
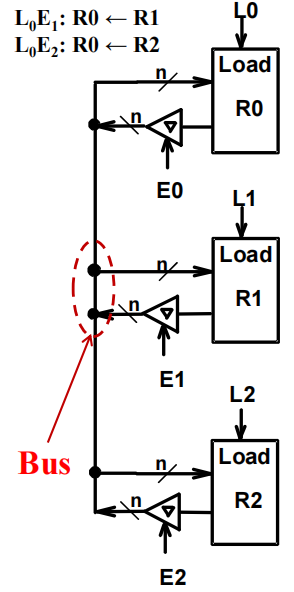
🌰:
$$ K1: R0 \leftarrow R1 \quad K2\overline{K1}: R0 \leftarrow R2 $$ 框图:
更详细的内部结构图 (4 位寄存器 ):

该类模型的泛化:

- MUX 的信息输入部分中,有 k 个来自专用逻辑的输入,以及 n - k 个来自寄存器或公用逻辑的输入
- 通过一个编码器,将 n 个选择转化为 MUX 的 m 个选择输入
- 缺陷:开销较大
专用逻辑、公用逻辑的概念见后面的小节
Bus-Based Transfers⚓︎
事实上,这种寄存器传输并不是基于总线实现的,放在这里只是为了和后面的设计进行对比
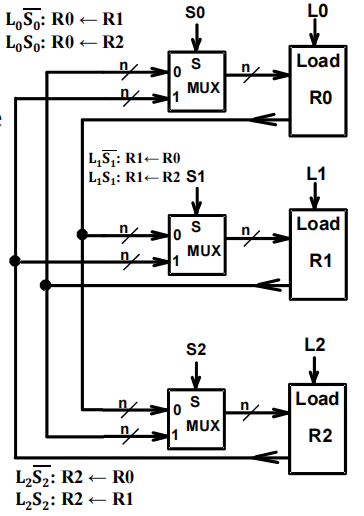
- 每个 MUX 都是某个寄存器的专用逻辑 (dedicated logic)
- 能够实现同步传输

- 由一个 MUX 驱动的单个总线,也就是说该 MUX 是寄存器的共用逻辑 (shared logic)
- 优点:电路更精简,成本更低
- 缺点:同一时间内只能传输一个数据
- 三态门的实现与共用 MUX 本质上是差不多的,因此它也只能一次传一个数据
- 但是三态门的实现降低了成本,因而也更常用
- 这里的符号可以进一步简化,最终可以得到右侧的电路图
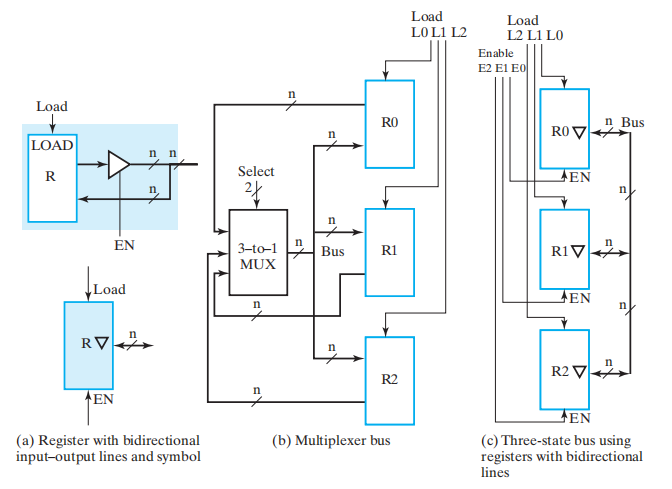
- 这里我们用到了使能信号 \(EN\):当 \(EN = 1\) 时表示输出,当 \(EN = 0\) 时表示输入
- 真正决定是否读入寄存器的是 \(Load\)
Shift Registers⚓︎
移位寄存器 (shift register) 能将数据向 MSB 或 LSB 的位置移动
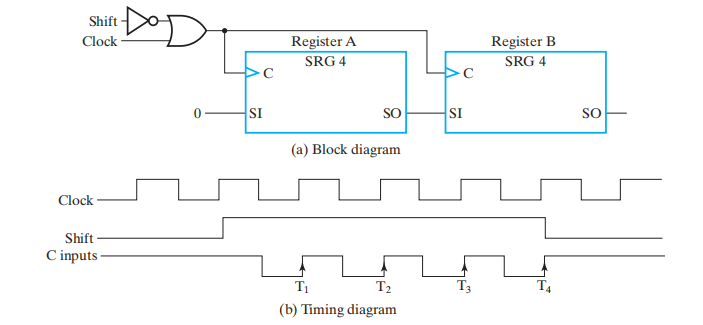
Serial Shift Register⚓︎
移位寄存器最简单的实现:仅用一组按行排列连接起来的D 触发器构成:
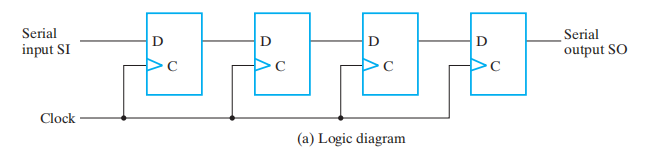
- 串行输入 / 右移输入 (serial input/ shift right input)——数据输入
- 串行输出 (serial output)——数据输出
符号:
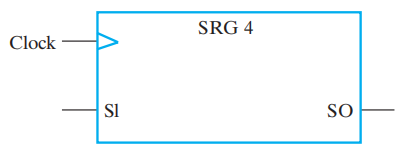

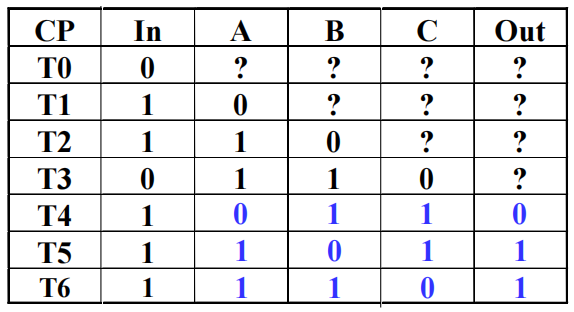
- CP 表示时钟脉冲,\(T_i\) 表示第 i 个时钟周期
- '?' 表示未知状态,
Parallel Load Shift Registers⚓︎
" 并行 " 主要体现在两方面:
- 并行输出 (parallel output):在同一时钟周期内得到所有触发器的结果
- 并行载入 (parallel load):在同一时钟周期内对所有触发器载入数据
n 位并行加载移位寄存器 (parallel load shift registers)
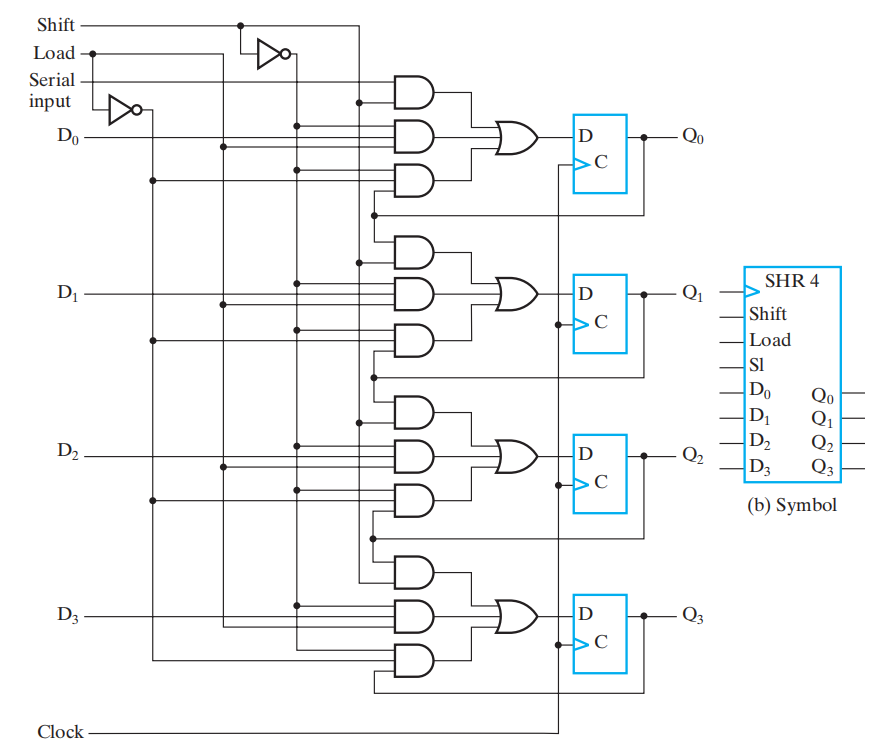
细节分析
- 观察右侧的触发器,发现其结构大致类似上面的串行移位
-
较麻烦的可能还是分析每个触发器对应的逻辑门,每个与门的功能如下:
-
第一个与门 \(F_{i1} = \begin{cases}Shift \cdot SI & \text{第一个FF} \\ Shift \cdot Q_{i - 1} & \text{其余FF}\end{cases}\),当 \(Shift = 1\) 时,寄存器执行移位操作
-
第二个与门 \(F_{i2} = \overline{Shift} \cdot Load \cdot D_i\),当 \(\overline{Shift} \cdot Load = 1\) 时,寄存器执行并行加载
- 第三个与门 \(F_{i3} = \overline{Shift} \cdot \overline{Load} \cdot Q_i\),当\(\overline{Shift} \cdot \overline{Load} = 1\)时,寄存器保持上次的值
-
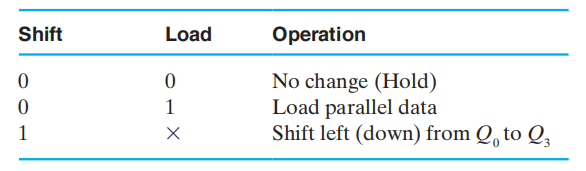
功能表:
Shift Registers with Additional Functions⚓︎
上述移位寄存器只能进行单向移位操作,因此被称为无向移位寄存器 (undirectional SHR)。下面我们将实现一个具备右移、左移、并行加载、保持功能的 SHR,被称为双向移位寄存器 (bidirectional SHR)
这里只展示整个移位寄存器的一部分,不难想到对于寄存器的每一位,我们都要用一个 MUX 进行选择

功能表:

Counters⚓︎
两种常见类型:
-
异步计数器 / 行波计数器 (asynchronous counters/ripple counters)
- 对于表示最低位的触发器,它的时钟输入与时钟相连
- 对于表示其他位的触发器,它们的时钟输入与来自上一位的输出相连,因此电路不是同步的
- 当逐位接近最高位时,由于电路元件自身的延迟,输出发生改变的延迟将会越来越大
- 优点:低能耗
-
同步计数器 (synchronous counters)
- 时钟与触发器的时钟输入直接相连
- 用逻辑实现想要的状态序列
Ripple Counters⚓︎

工作流程:
- 当触发器 A 的时钟输入出现正边沿时,A 取补,即从 0 变成 1 或从 1 变成 0
- 触发器 B 的时钟输入 = \(\overline{A}\)
- 当触发器 A 的输出从 1 \(\rightarrow\) 0 时,触发器 B 的时钟输入就会出现正边沿,此时 B 取补
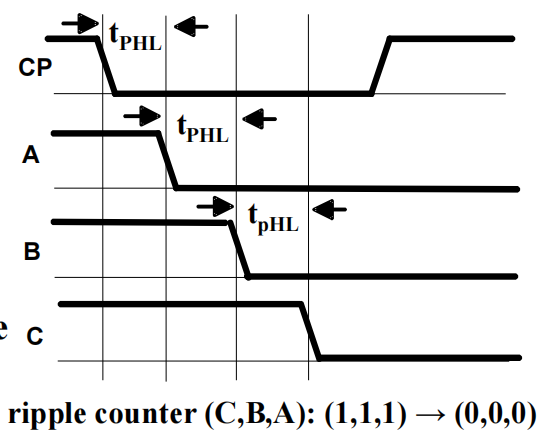
下面的时序图可以更加直观地展示上述内容:
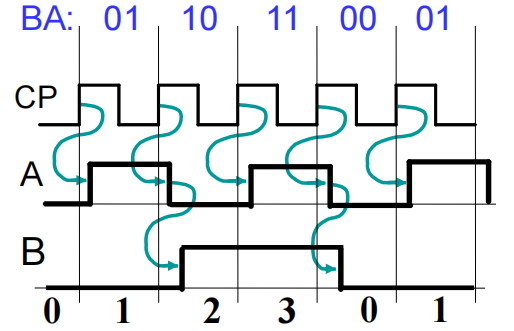
- 蓝绿色箭头表示“工作流程”所述的因果关系
- 对应的状态序列 (B, A) = (0, 0), (0, 1), (1, 0), (1, 1), (0, 0), (0, 1)……
对于 3 位行波计数器,当 C = B = A = 1 时,计数器的状态为 (C, B, A) = (1, 1, 1),下一次时钟的增加使得 (C, B, A) = (0, 0, 0)。从下面的时序图中,我们发现:
- 时钟 - 输出延迟 \(t_{PHL}\) 导致时钟边沿不断增加的延迟
- 对于 n 为行波计数器,最坏情况的延迟为 \(n \cdot t_{PHL}\)
4 位行波计数器的框图
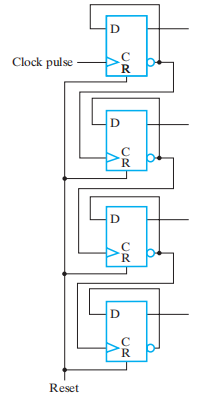
理解行波计数器
这种电路之所以成为行波计数器,是因为每次边沿的变化(这里是正边沿)都会导致下一个触发器状态的改变。这种变化就像水面的涟漪一样在触发器“链”上传播 ( 每次变化发生于前一阶段的时钟 - 输出延迟之后 )
Synchronous Counters⚓︎
类别
为了消除行波影响,我们让每个触发器使用共同的时钟,并用一个组合电路来生成下一状态。例如对于升计数器 (up-counter),我们会使用一个自增器 (incrementer)
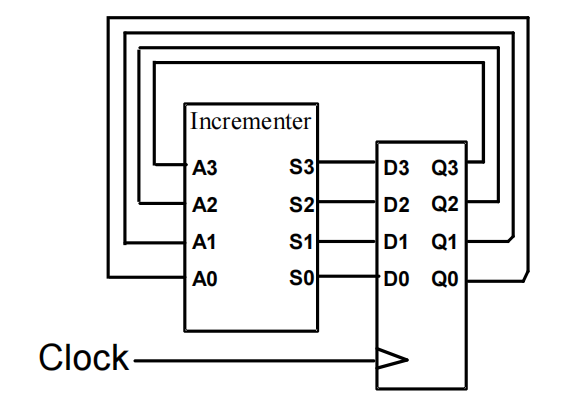
内部细节:

- 内部逻辑:蓝色方框表示自增器
- 计数使能 (count enable, EN):迫使与门链的输出均为 0,用来保持状态
- 出进位 (carry out, CO):自增器的一部分。通过将 CO 与另一个计数器的 EN 端连接,构建一个更大的计数器
上图中,与门链导致“进位链 (carry chain)”的出现,因而产生较长的通路延迟,这种计数器的形式被称为串行门 (serial gating)
将与门链 \(\Rightarrow\) 并列的与门,我们得到了另一种形式——并行门 (parallel gating),这种形式减少了通路延迟,类似超前进位。它利用 CO 和 EN 来阻止较长的通路。逻辑图如下 ( 用它替换 serial gating 电路图中蓝框部分的电路 ):

布尔方程:
符号:
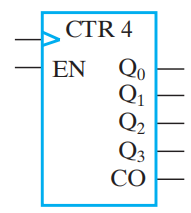
Other Counters⚓︎
- 降计数器 (down counter):向下计数
- 升降计数器 (up-down counter):既可以向上,也可以向下计数,取决于控制输入的值,比如 \(Up/\overline{Down}\)
- 并行加载计数器 (parallel load counter):能够并行加载可用的值,取决于控制输入 ( 比如 \(Load\))
- 模 n 计数器 (divide-by-n/ modulo n counter):
- 对除以 n 的余数进行计数
- 或者对任意 n 个状态的序列进行计数(根据具体状态分析)
- BCD 计数器是一个模 10 计数器
Up-Down Binary Counter⚓︎
🌰:4 位升降计数器,有使能输入 EN,选择输入 S(S = 0 时向上数,S = 1 时向下数 )
输入方程:
该方程既能用串行门实现,也能用并行门实现,这里就不给出具体的实现了。
Counter with Parallel Load⚓︎
将并行加载的功能用于计数器内,这样可以给计数器设定一个我们想要的数字
电路实现:
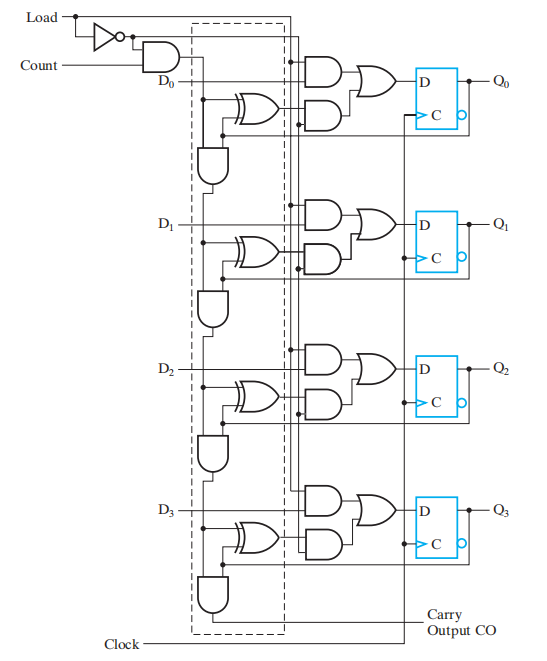
功能表:
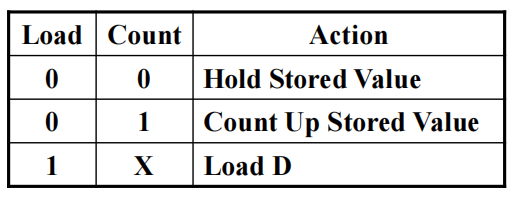
注:可以看到 Load 的优先级高于 Count,因为只要 Load = 1,不管 Count 有什么值,计数器执行加载功能
Synchronous BCD⚓︎
状态表:
注:10-15( 即 1010-1111) 是我们不关心 (don't care) 的情况
使用 K-maps,对下一状态的方程进行两级优化,得到以下方程:
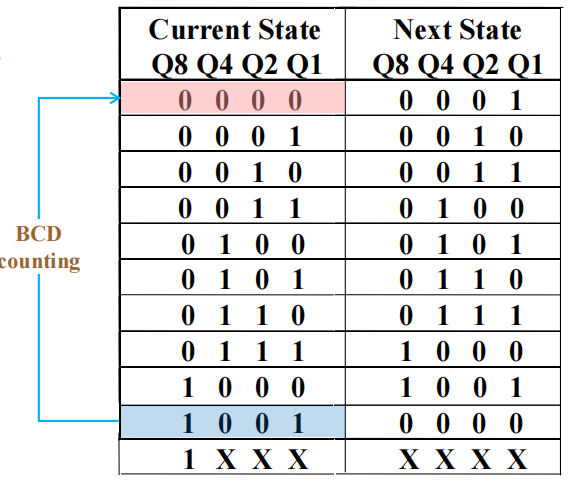
思考
如果计数器的电源受到干扰,或者受到其他影响,使得计数器的状态不在 0000-1001 之间,会出现什么问题呢?
\(\therefore\) 我们需要让计数器具备“自愈能力 (self-healing ability)”,使得它能在 2 个时钟周期内,从异常状态中回到正常状态。利用好那 6 个“不关心”的状态,可以实现这个“自愈能力”,状态表和状态图如下:
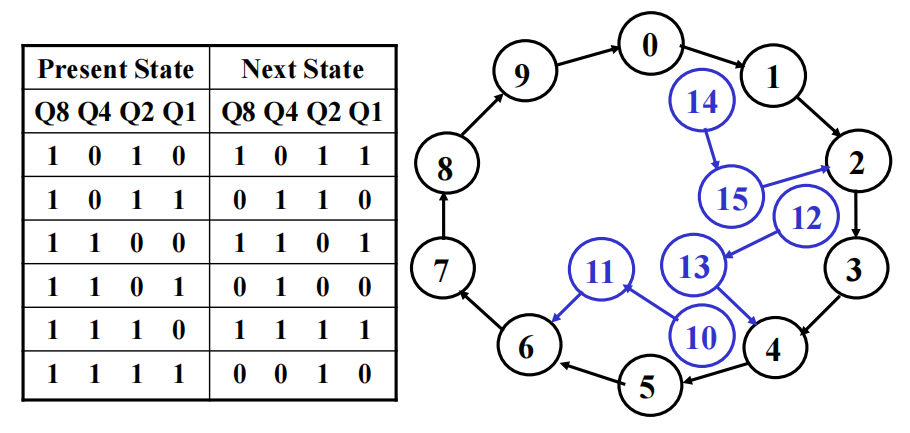
考虑更高要求的自愈能力
- 报错功能:电路需要表明遇到了非法状态。对于上述电路,\(Error = Q_8Q_4 + Q_8Q_2\)
- 在 1 个时钟周期内,状态从非法回到合法
- 从非法状态返回至一个具体的状态 ( 比如 0)
另一种实现方法:并行加载二进制计数器 + 与门
电路实现:

注:当计数到 1001 时,Q0 = Q3 = 1,这使得 Load = 1,计数器执行加载功能,将读入 D(3: 0) 的值,即 0000,从而实现 0-9 之间的计数
例题

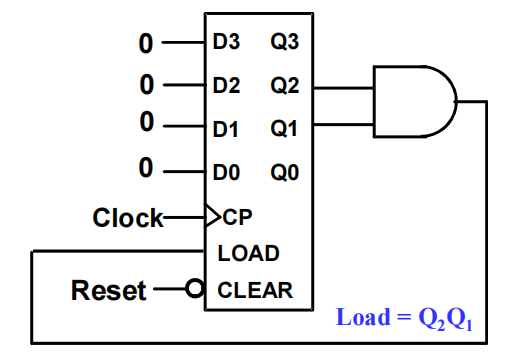
Counting Modulo N⚓︎
下列技术将用到带有异步 / 同步的清空 (clear),以及 / 或者并行加载 (load) 的 n 位二进制计数器:
- ❌在模 N 计数中,当检测到最后的数N时,进行异步清 0,或者异步加载值 0。然而,这种方法使得数字仅在很短的时间内出现,导致在某些情况下无法正常工作
- ✅在模 N 计数中,当检测到最后的数N - 1时,同步清 0,或者同步加载值 0
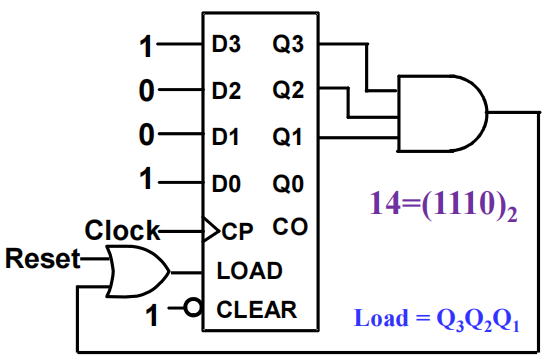
- 检测最后的数,使用加载功能提前预设值,满足 == 最后的数 - 预设值 = N - 1==,也就是说计数的范围变成了 [ 预设值,最后的数 ]。实在看不懂的话见下例中第 2 种实现方法
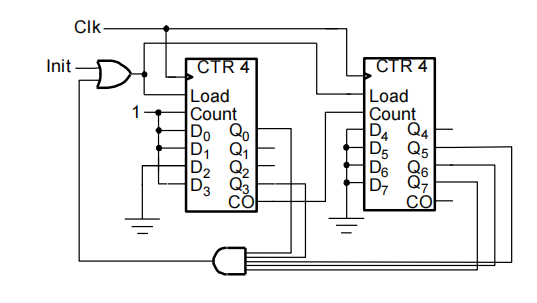
模 7 计数器
注:原理同 BCD 计数器,只是它是数到 6 就要返回 0
预设加载值 9,当数到 14 时,由于 14 - 9 = 7 - 1,因此需要回到 9,计数范围为 \([9, 14]\)
电路实现:
注:
- 预设值是在输入 D(3: 0) 处设置
- 对于该计数器,如果最后的数设为了 15,那么可以利用进位 CO 检测该最后的值 ( 这样就省去一个与门了 )
Register Cell Design⚓︎
时序电路设计的两种方法
- 基本设计方法:将触发器和逻辑门作为基本的构建模块
- 寄存器传输层级 (register transfer level, RTL) 设计:将不同类型的寄存器(e.g. 计数器,移位寄存器 ) 和函数块(e.g. MUX, 加法器 ) 作为基本的构建模块
注:RTL 设计是一种数据流方法——能够将数据从一个寄存器传到另一个
比较:
| Basic Design | RTL Design |
|---|---|
| 基本构建块为逻辑门和触发器 | 基本构建块为寄存器和函数块 |
| 本质上更加机械化 | 更贴合行为描述,更加符合直觉 ( 建立了数据流模型 ) |
| 仅适用于状态数量少的电路 | 能够实现具有大量状态的复杂电路 |
在组合电路中,我们使用迭代阵列实现复杂的组合电路。同样地,我们可以将这种思想运用到时序电路的设计中——将迭代组合电路和触发器相连接,构建一个双态时序电路,被称为寄存器单元 (register cell)。只要我们构建了一个存储器单元,然后复制 n 份副本,我们就构建出能够执行一个或多个微操作的 n 位寄存器。
由此,我们得到了寄存器设计的步骤:
- ⭐设计具有代表性的寄存器单元
- 复制并连接寄存器单元,构成完整的寄存器
- 修改某几个寄存器单元以解决一些特殊情况或边界问题
寄存器单元设计的方法:
-
MUX:使用 n 输入 MUX,以及一系列的传输源和函数
- 专用逻辑 (dedicated logic):实现微操作的组合逻辑被视为寄存器的一部分
- 共用逻辑 (shared logic):被多个寄存器共用的,实现微操作的组合逻辑
- 通过控制信号 \(K_0, K_1, \dots, K_{n-1}\) 的或运算,生成加载使能信号
-
如何选择来自源,或 / 和传输函数?
- MUX + 编码器 ( 如图所示 ):控制输入需要被编码
- n \(\times\) 2 与 - 或门:控制输入不需要被编码
-
- 找到状态图或状态表,注意只有两个状态分配后的状态 = 寄存器单元的输出值
- 运用 Chap 4 介绍的流程来完成单元设计
- 优化:K-maps(4-6 个变量 )、手动优化或计算机辅助 ( 更多的变量 )
寄存器单元的规范包括:
- 寄存器函数 (register functions):一般用寄存器传输表示
- 控制输入 (control input)
- 无编码形式:比如 Load, Shift, Add,1 个时钟周期内至多有 1 个输入为 1,即 (0, 0, 0), (1, 0, 0), (0, 1, 0), (0, 0, 1)
- 编码形式:比如 S1, S0,所有的组合为 (00, 01, 10, 11)
- 数据输入 (data input)
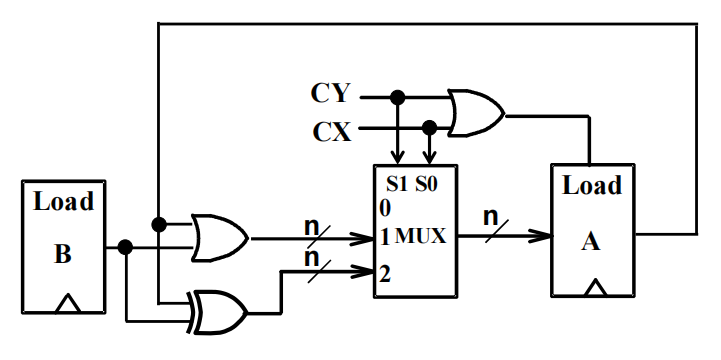
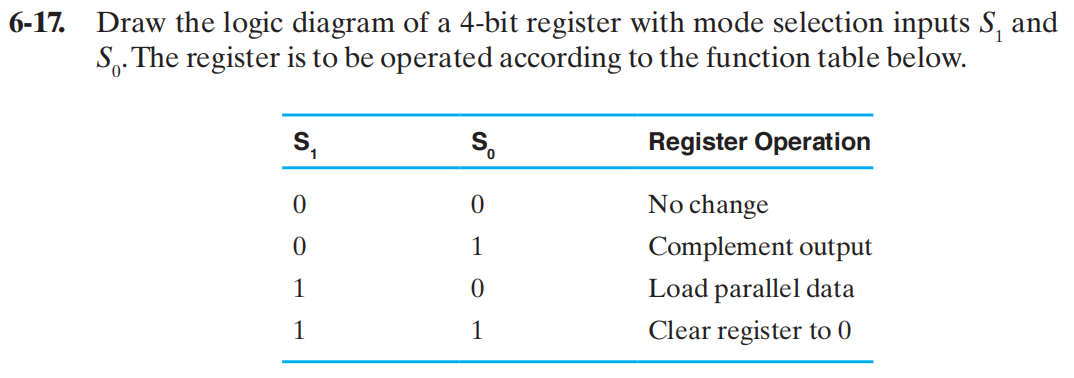
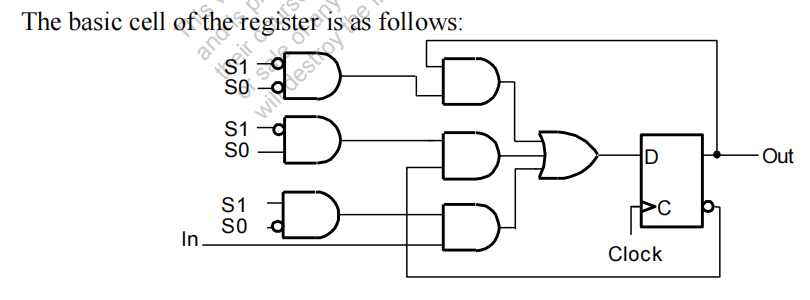
例题

- 寄存器的加载信号:Load = CX + CY
- 由于控制输入的数量少,因此不需要用到编码器,我们直接将控制输入与 MUX 的选择输入连接,得到:S1 = CY, S0 = CX
- 寄存器的数据输入:
- 当 Load = 0,即 (CX, CY) = (0, 0) 时,寄存器 A 保持状态
电路实现:
单个元件的门成本 = 19,共享译码器的成本 = 8
状态表:
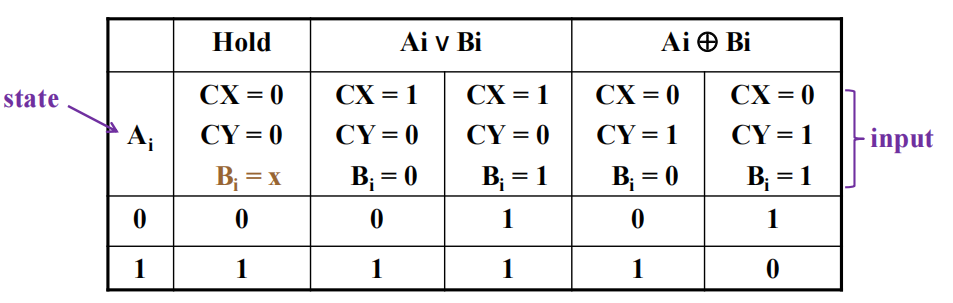
- 4 个变量将给出状态表的 16 个状态项
- 因为我们不会用到 CX = CY = 1 的条件 ( 即 don't care conditions),因此实际上我们只关心 12 个项
K-map 化简:

我们得到 SOP 方程为: $$ D_i = CXB_i + CY\overline{A_i}B_i + A_i\overline{B_i} + \overline{CY}A_i $$ 进一步化简(为了减少门成本),得到: $$ D_i = CXB_i + A_i \oplus (CYB_i) $$ 门输入成本 = 2 + 8 + 2 + 2 = 14,因此比法一更节省成本。而且由于没用到使能信号,成本将进一步减少
Info
书上 (\(P_{354-359}\)) 还有 2 个寄存器单元设计的例子,均采用时序电路设计的方法(没用到寄存器
Control of Register Transfers⚓︎
Introduction to Register Transfer Systems⚓︎
基本元素:
- 一组寄存器:大多数是数据通路,部分为控制单元
- 基本操作 ( 微操作 ):寄存器传输
- 控制:监督寄存器传输序列
Register Transfer System Design Procedure⚓︎
- 写下详细的系统规范 (specification)
- 找出所有的输入信号( 数据、控制、状态 ),所有的输出信号( 数据、控制、状态 ),以及寄存器的数据通路和控制单元
- 找出系统的状态机 (state machine diagram),包括作为输出的数据通路和控制单元上的寄存器传输
- 找出所有的内部控制和状态信号,用这些信号将状态机中的输出条件和行动分开 ( 包括寄存器传输 ),并将它们用表格表示出来
- 画出数据通路的框图,包括所有的控制、状态输入和输出;如果包括寄存器传输的硬件,画出控制的框图
- 设计出具体的寄存器传输逻辑,用于数据通路和控制
- 设计控制单元逻辑
- 验证数据通路和控制单元结合后的操作是否正确,若失败,调试系统并验证改变后的系统,直至符合预期目标
A Design Example( 涉及到状态机的知识,可以选择性阅读 )
🌰:Dashwatch(一种简单的停表,时间上限为 99.99s)
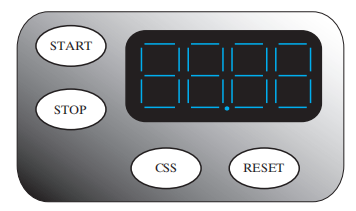
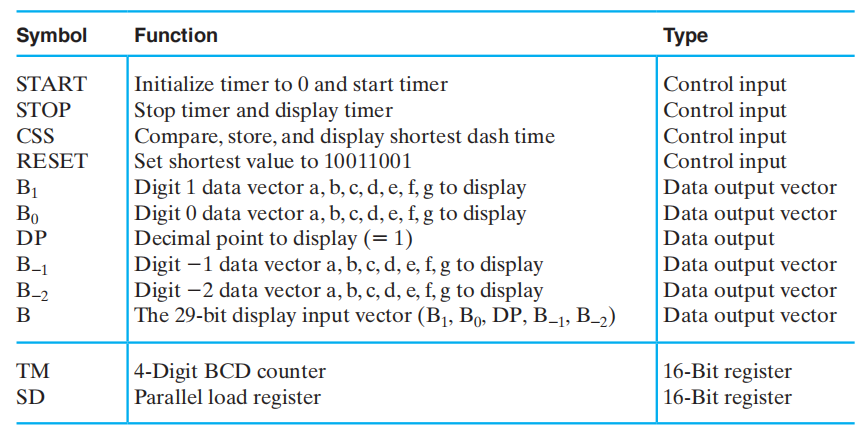
- 输入:
- START:将时间复位至 0,随后开始计时
- STOP:停止计时,在 4 位 BCD 数码管上显示最近的时间
- CSS:比较、存储和显示最小的时间
- RESET
- 输出:4 位 BCD 数码管 + 小数点
- 寄存器:
- 4 位 BCD 计数器 (TM):每隔 0.01s 向上数
- 16 位并行加载计时器 (SD):存储最短的时间
所有的输入、输出和寄存器:
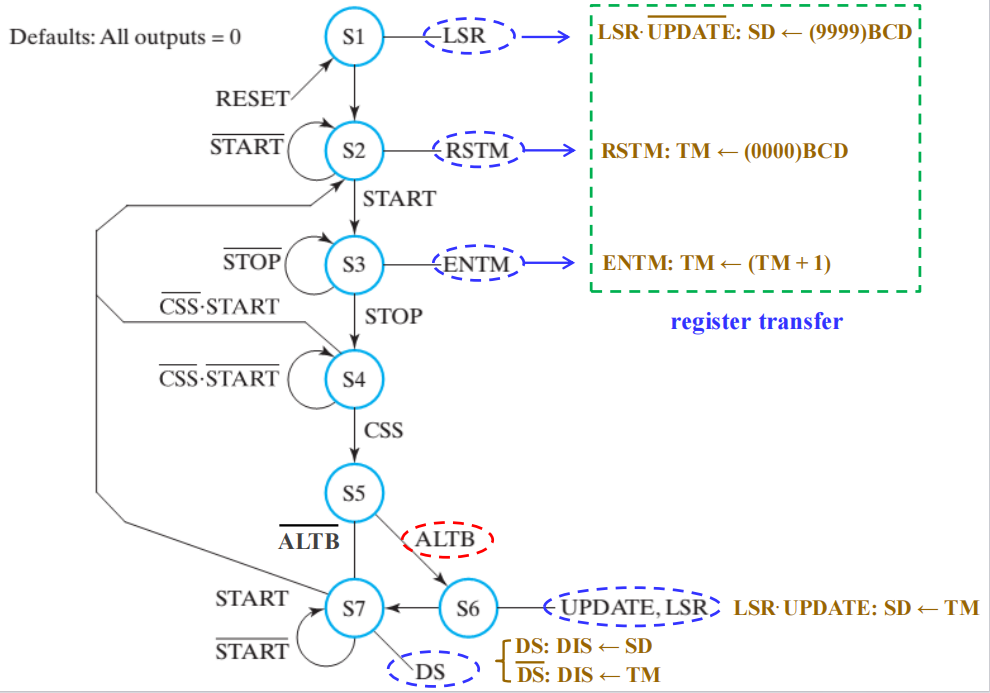
寄存器传输输出的状态机 ( 摩尔型 )
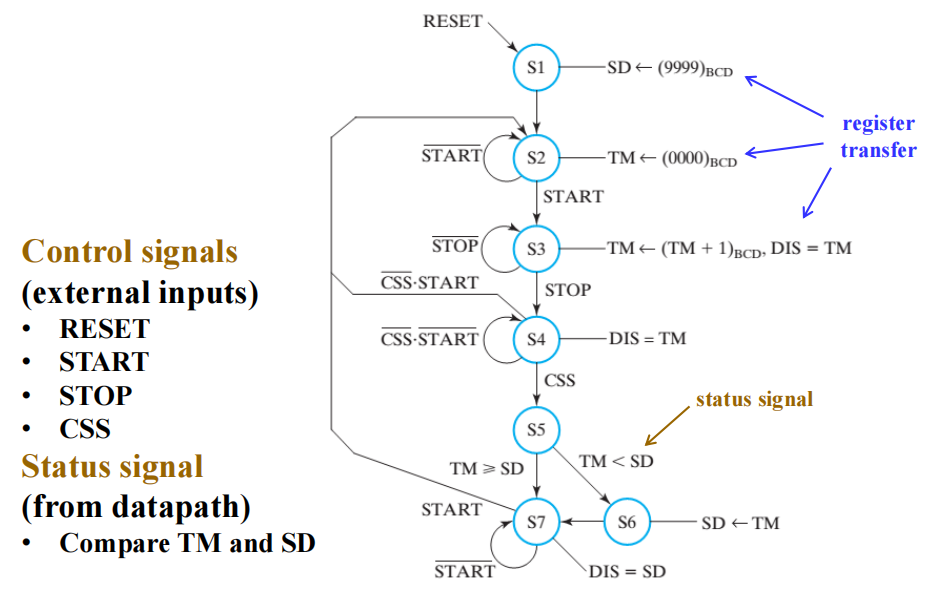
- S1:复位状态,初始化 SD 位 1001100110011001(99.99),即最大值
- S2:紧随 S1 发生,使 TM = \((0000)_{BCD}\)
- S3:计时状态。按下 START 键后进入计时状态,按下 STOP 键后退出。在该状态下,T 的值在每个时间脉冲内自增 1(0.01s,时钟频率 = 100Hz),DIS 显示 TM 的值
- S4:决定阶段,从以下 3 个状态中选择 1 个:
- 比较、存储并显示最短时间
- 继续显示 TM 的值
- 重新开始
- S5:比较 TM 和 SD 的值
- S6:如果 TM 更小,TM 的值被加载至 SD 内
- S7:重新开始,并显示 SD 存储的最短时间
输出控制 / 状态表:
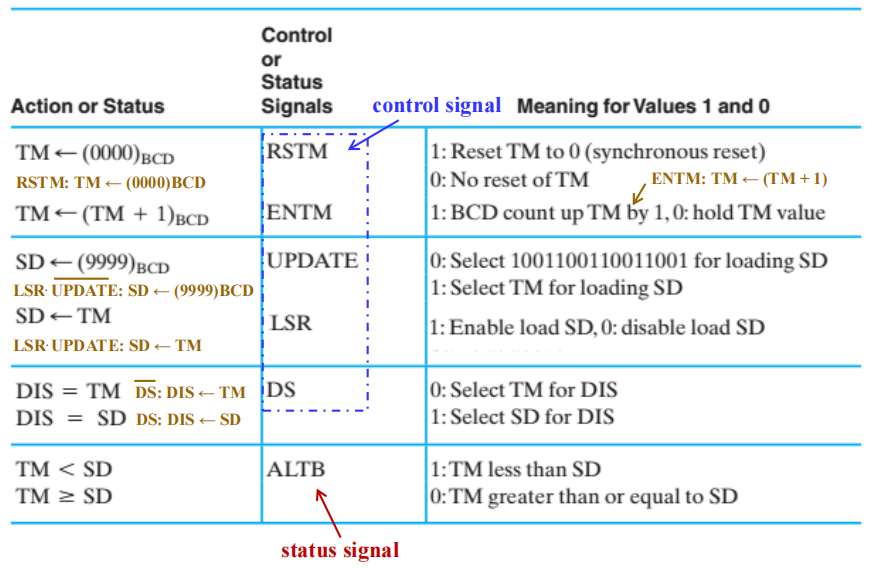
找出内部控制 / 状态信号:
-
TM:计时器
- 复位至 0:RSTM
- 向上计数的使能信号:ENTM
-
SD:最短时间
- 加载 SD:LSR = 1
- 选择输入 9999:UPDATE = 0
- 选择输入 TM:UPDATE = 1
-
DIS:显示 (\(B_1, B_0, DP, B_{-1}, B_{-2}\))
- 选择输入 TM:DS = 0
- 选择输入 SD:DS = 1
-
比较 TM 和 SD(状态)
- TM < SD:ALTB = 1
- TM \(\ge\) SD:ALTB = 0
数据通路:
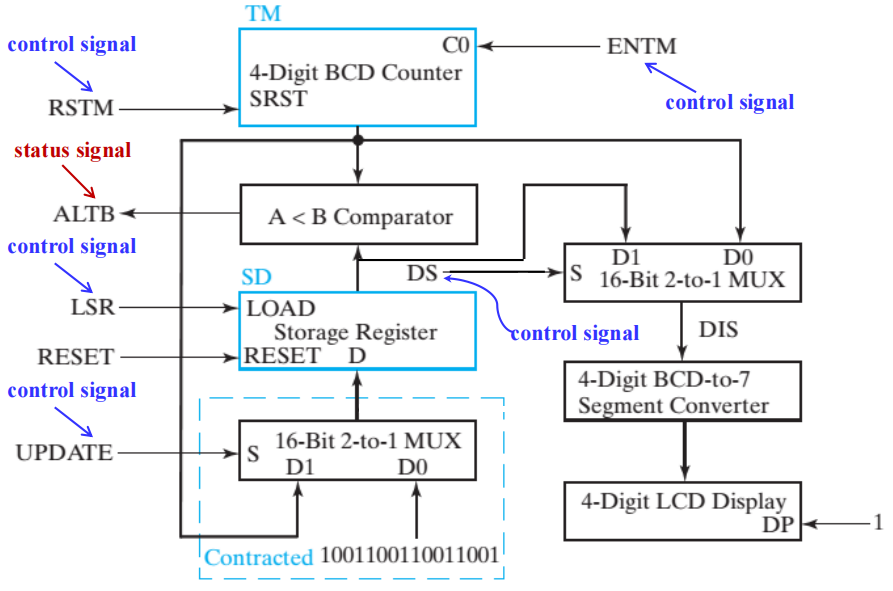
数据通路的开发细节:
-
TM:带有同步复位的 4 位 BCD 计数器
- 基于先前的 BCD 加法器设计
- 添加同步复位 SRST
- SRST = RSTM
- C0( 进入的进位 ) = ENTM
-
A < B 比较器
- 比较 TM 和 SD
- 设计从左往右的迭代单元阵列,输出 C0
-
SD:标准 16 位并行加载寄存器
- LOAD = LSR
- 使用 16 位 2-1MUX,从 \(9999_{BCD}\) 和 TM 中选择并行加载输入 D
- S = UPDATE
显示逻辑:
- 16 位 2-1MUX
- 4 位 BCD7 段数码管转换器
- 4 位七段数码管显示器 ( 带有小数点 ):小数点控制:DP = 1
取代寄存器传输的控制信号输出的状态机:
使用 D 触发器进行独热码状态分配 (7 位 ),得到下列输入方程:

输出方程为:
注:课本上还有一个更复杂的例子,我还没来得及看……
Microprogrammed Control⚓︎
- 不可编程的系统 (non-programmable system)——具体系统
- 没有编程计数器 (program counter, PC) 或者类似的寄存器
- 控制单元不进行获取和执行指令的操作,而是基于输入和数据通路的状态位,决定要执行的操作 ( 序列 )
- 可编程的系统 (programmable system)——通用系统
- 一部分输入由一系列指令 (instruction) 构成,被称为程序 (program)
- 通常存储于内存,并且由 PC 决定地址
- 控制单元负责获取和执行指令
Serial Transfers and Microoperations⚓︎
- 当系统在一段时间内只能传递或操作 1 位信息时,称这个系统处于串行模式 (serial mode)
- 与串行传输相对的并行传输 (parallel transfer):同时传输寄存器的所有位
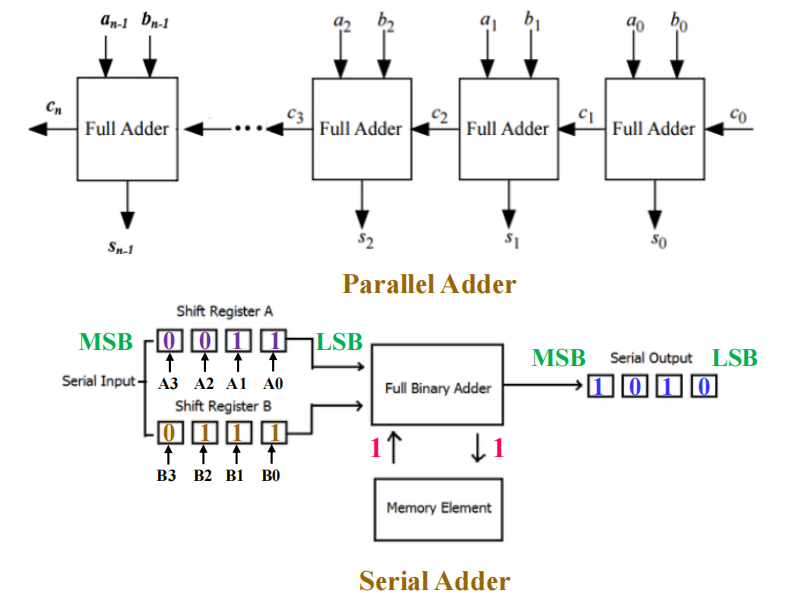
串行传输 ( 移位 ):
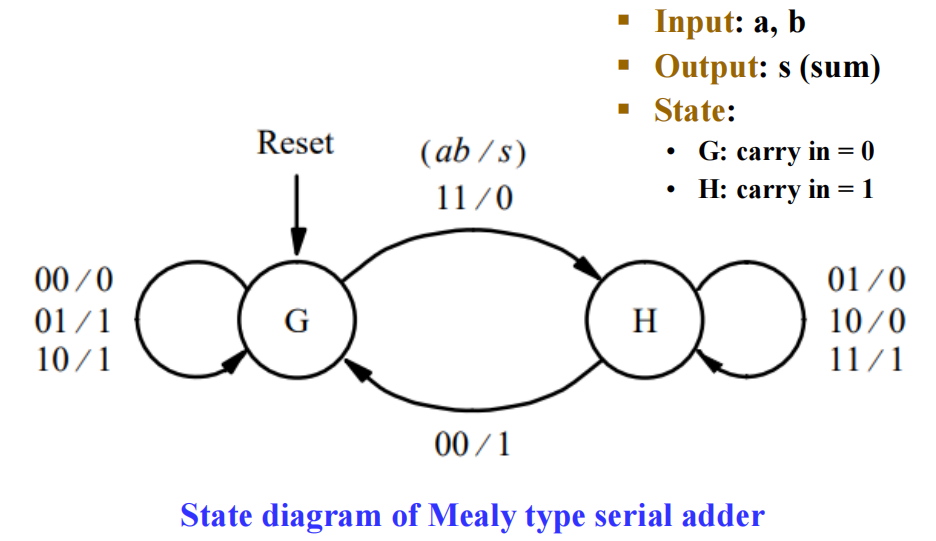
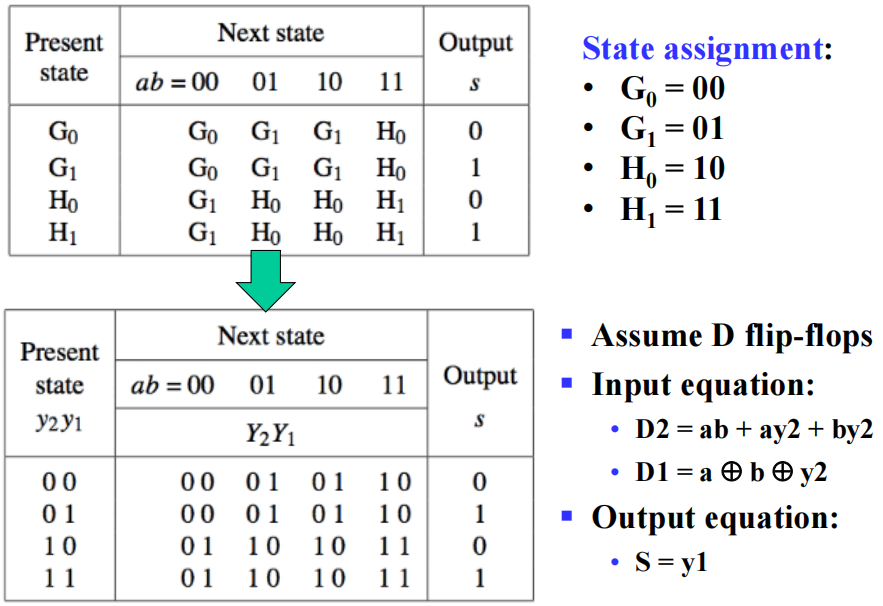
串行加法器 (serial adder)
它是一个时序电路,一次只能执行 1 位二进制加法
用 2 个状态记住进位:
- G:carry in = 0
- H:carry in = 1
状态图:
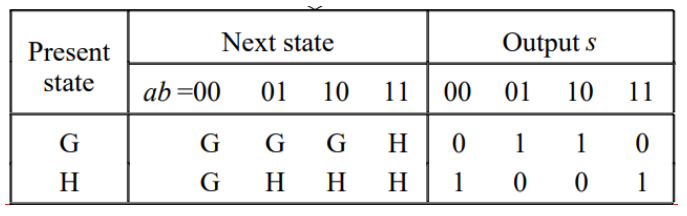
状态表:
状态分配后的状态表:

化简 ( 略 )
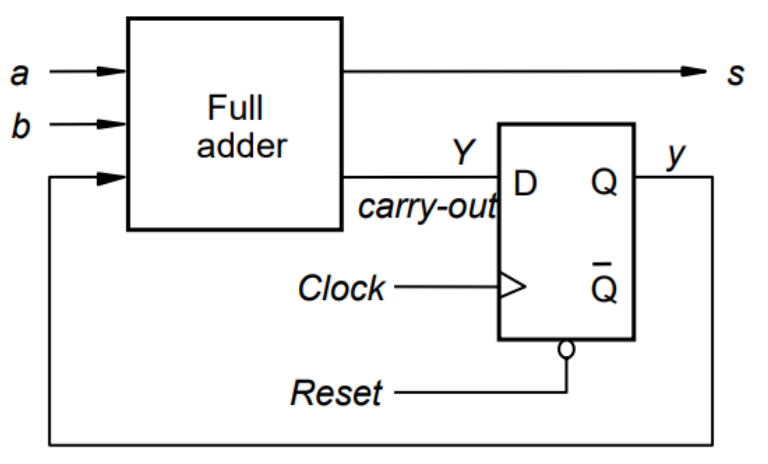
输入方程:\(D = ab + ay + by\) 输出方程:\(S = a \oplus b \oplus y\)
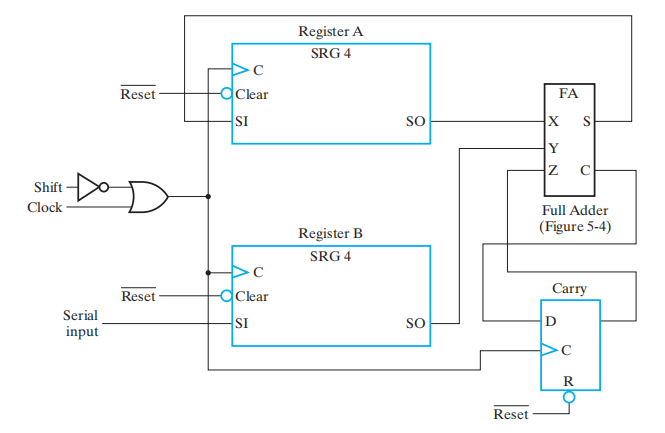
框图:
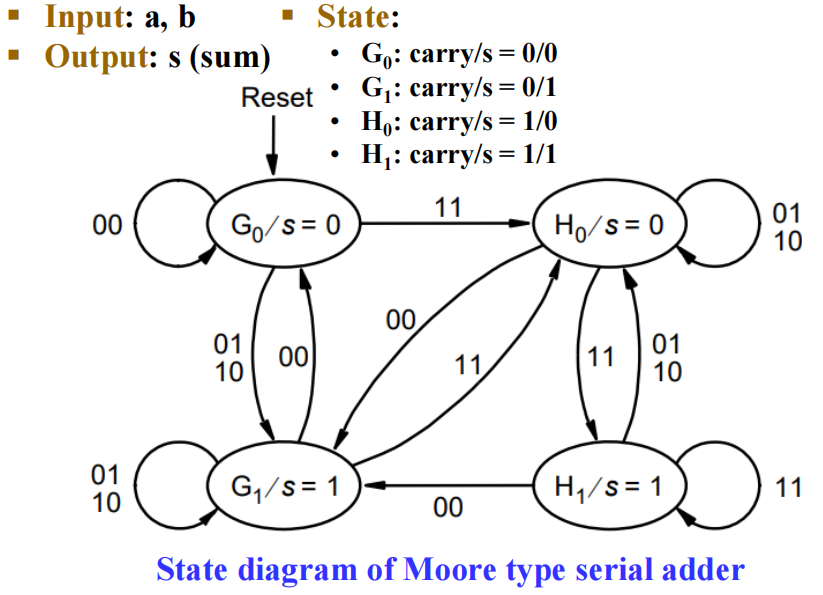
状态图:
状态表,输入方程和输入方程
框图:

上面 2 个电路仅保存了进位,如果我们想实现 \(A \leftarrow A + B\),就需要保存 A 的值。教材给出了对应的实现:
评论区