Recurrent Neural Networks⚓︎
约 2249 个字 42 行代码 预计阅读时间 12 分钟
训练一个非循环神经网络
- 一次性设置(setup one time):激活函数、预处理、权重初始化、归一化、迁移学习
- 训练动态(training dynamics):关注学习过程、参数更新、超参数优化
- 评估(evaluation):验证性能 (validation performance)、测试时增强 (test-time augmentation)
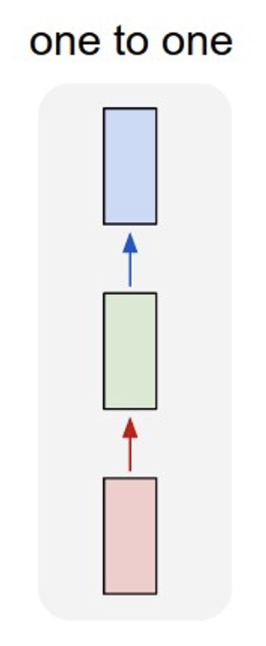
相比一般的神经网络,循环神经网络(recurrent neural network, RNN) 擅长的是处理序列(sequences)。
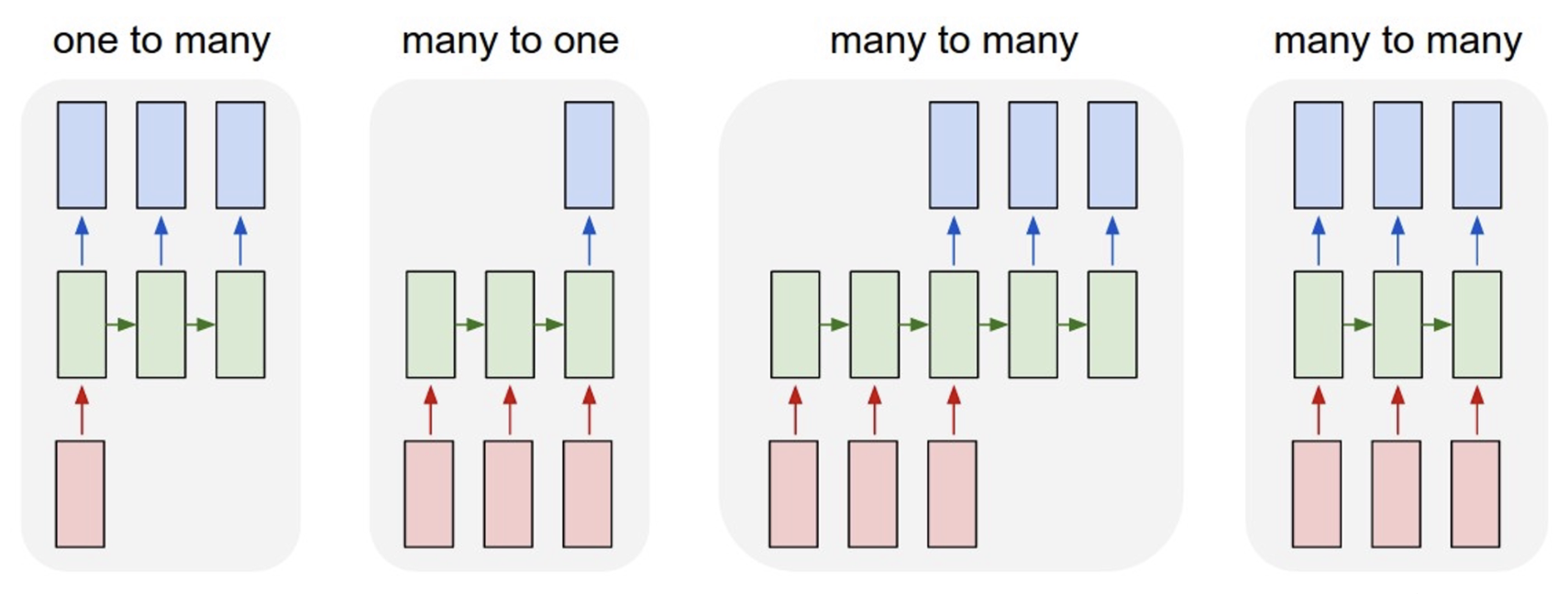
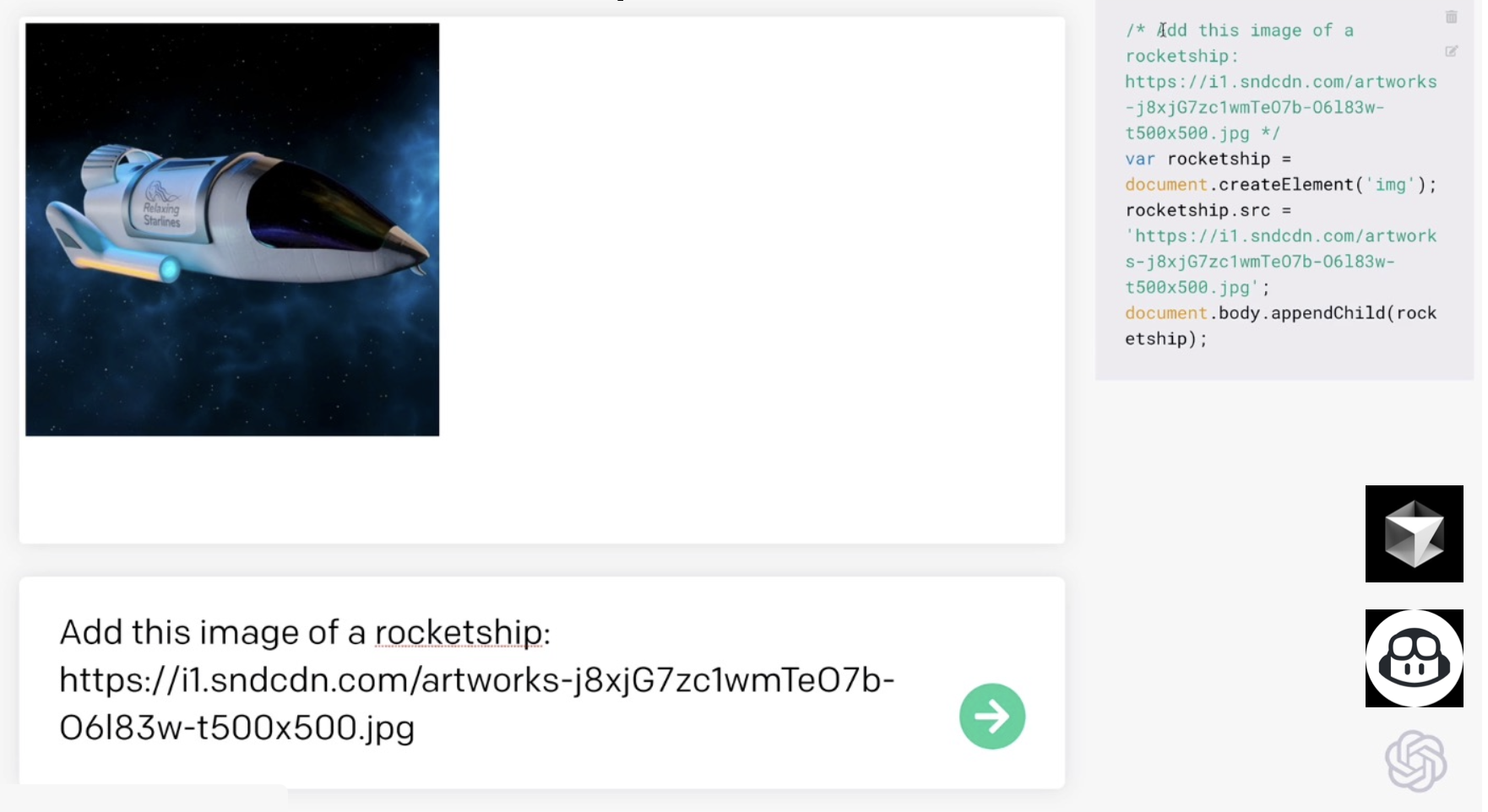
- 一对多:比如图像描述(一张图像 -> 一段词序列)
- 多对一:比如行动预测(一段视频帧序列 -> 一个行动类别)
- 多对多:比如
- 图像描述(一段视频帧序列 -> 一段词序列
) (右二) - 帧级别的视频分类(右一)
- 图像描述(一段视频帧序列 -> 一段词序列
其实也可作用在非序列数据上
通过一系列“瞥见 (glimpse)”来对图像进行分类:
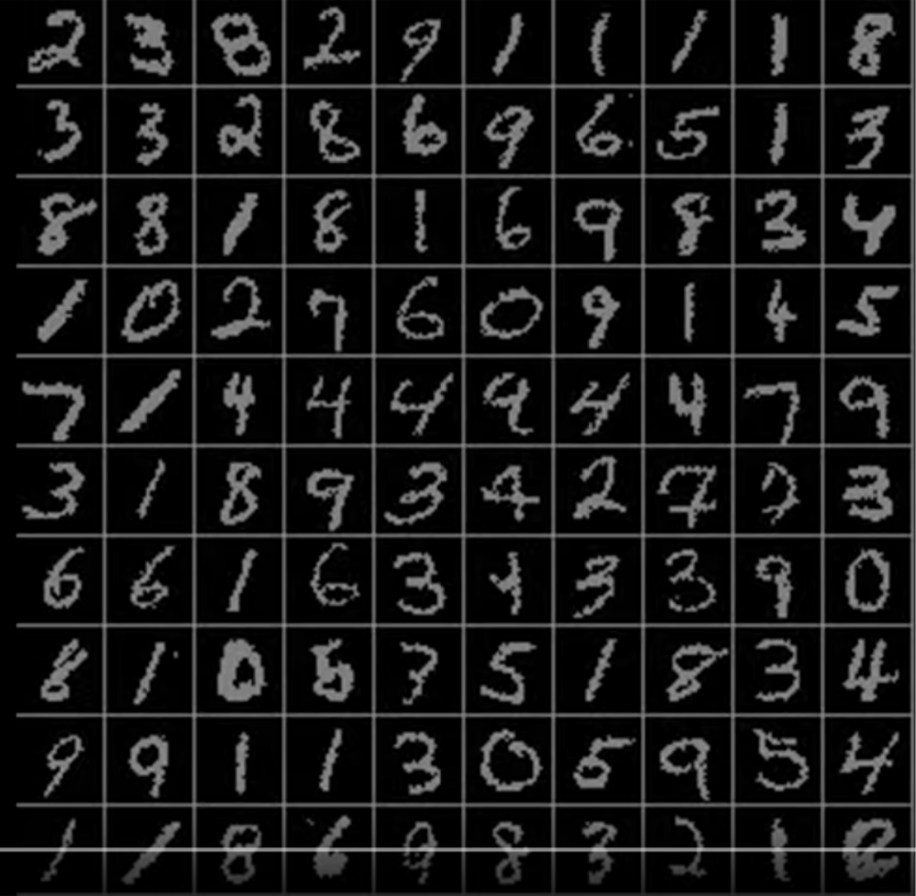
一块块地生产图像:
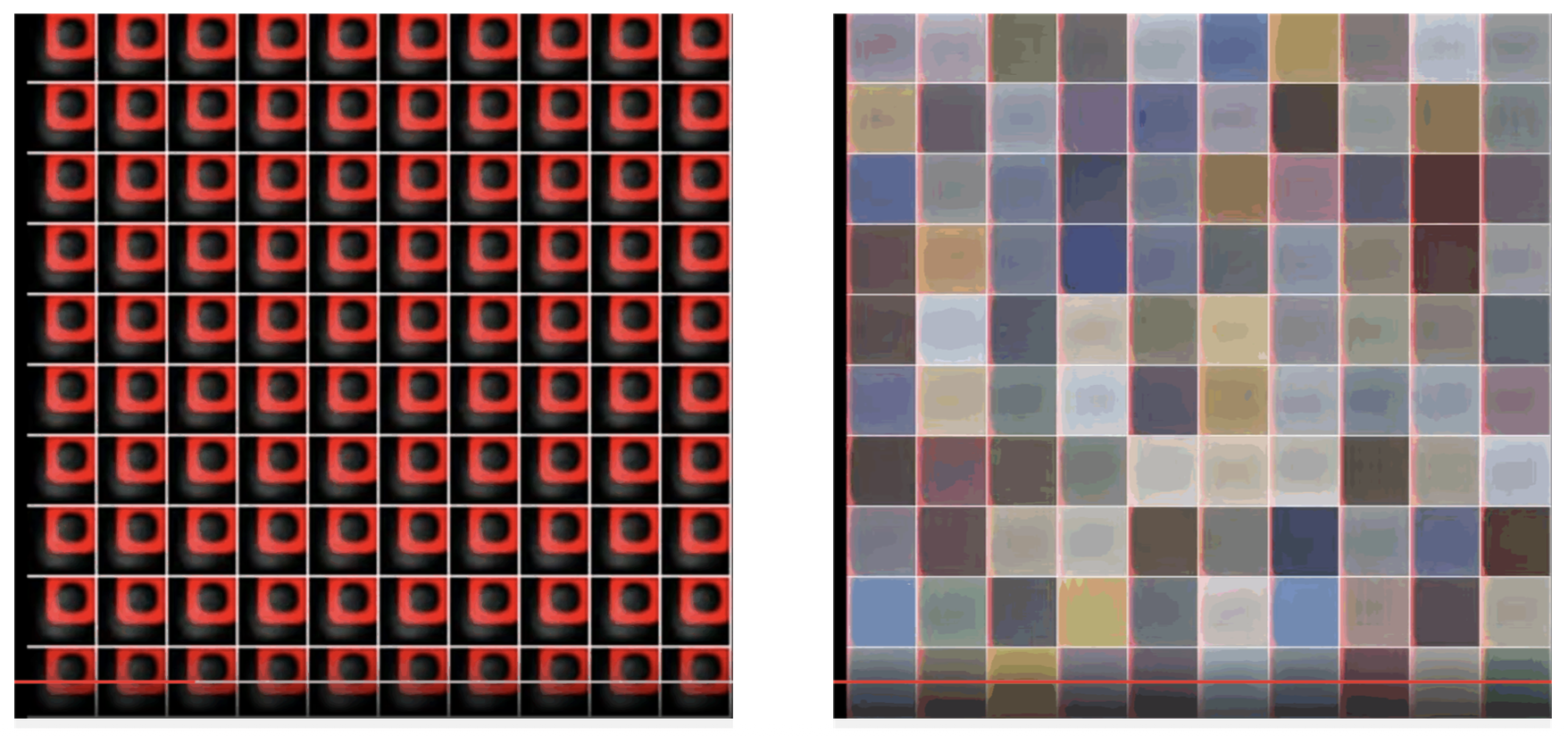
与油画模拟器集成,每一个时间步输出新的一笔:

RNN 的关键思想是有一个在序列处理过程中不断更新的“内部状态(internal state)”。
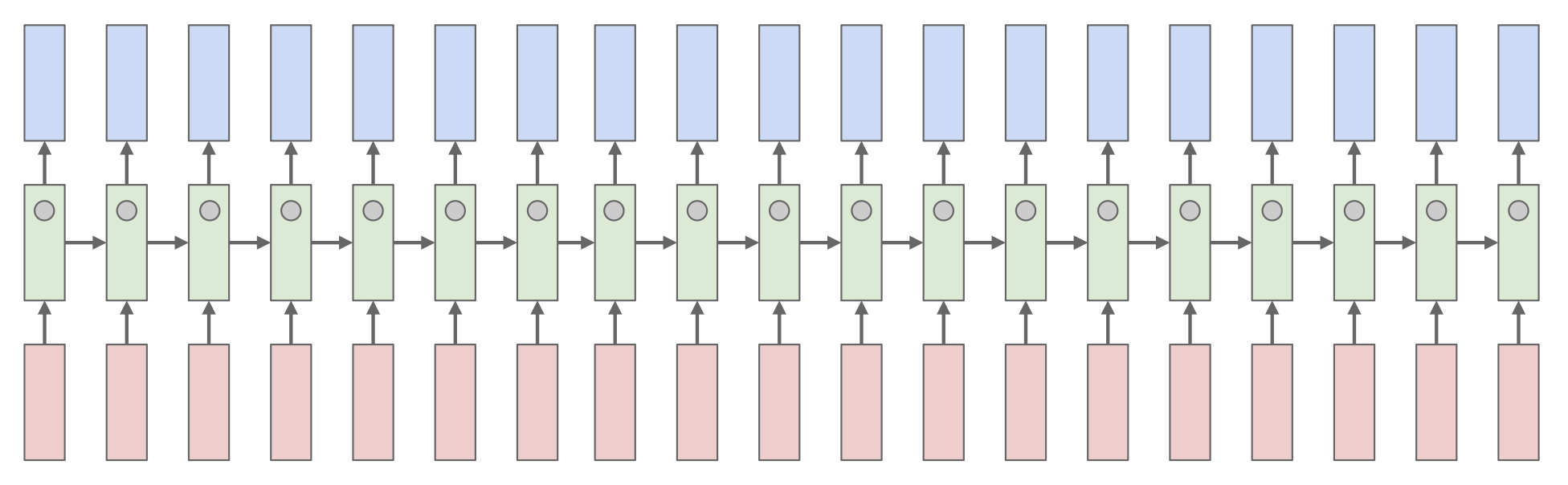
展开后的 RNN:
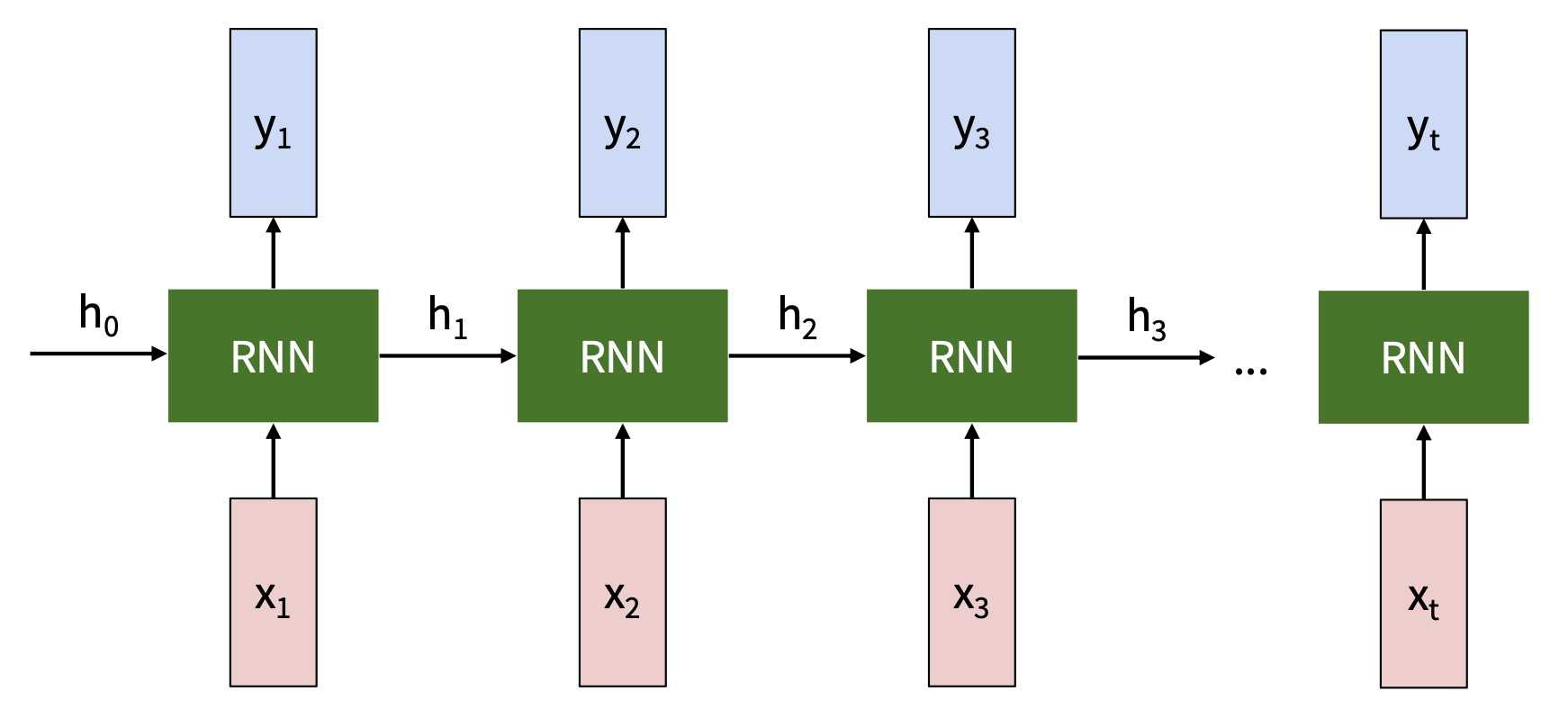
- 隐含的状态更新:\(h_t = f_W(h_{t-1}, x_t)\)
- \(h_t\):新状态
- \(f_W\):以 \(W\) 为参数的函数
- \(h_{t-1}\):旧状态
- \(x_t\):在某一时刻的输入向量
- 输出生成:\(y_t = f_{W_{hy}}(h_t)\)
- \(y_t\):输出
- \(f_{W_{hy}}\):另一个以 \(W_{hy}\) 为参数的函数
- \(h_t\):新状态
注意:每一步都用到相同的函数和参数。
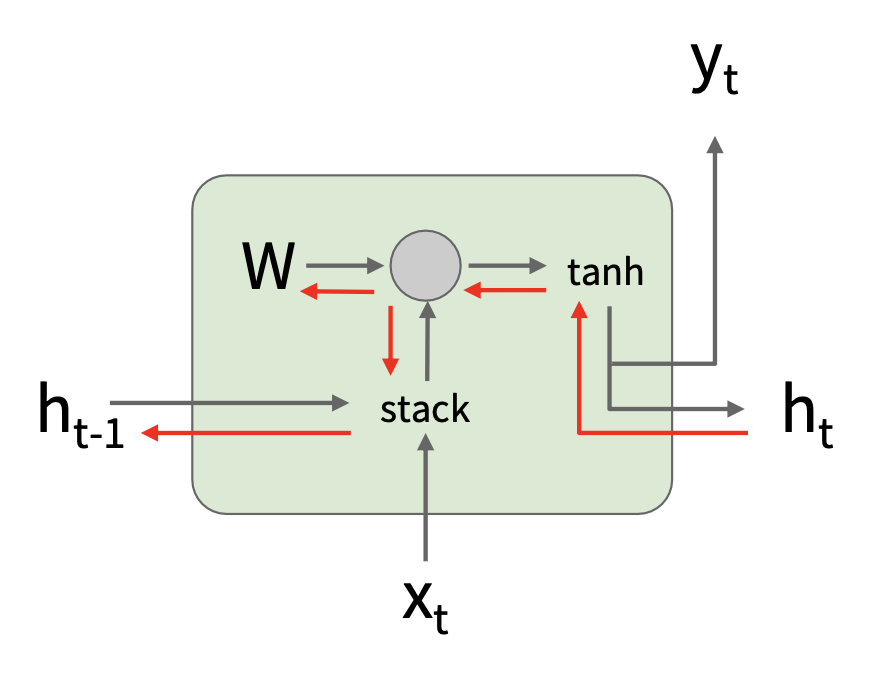
Vanilla RNNs⚓︎
在一个简单的 RNN(Vanilla RNN / Elman RNN)中,
- \(h_t = \tanh (W_{hh}h_{t-1} + W_{xh}x_t)\)
- \(y_t = W_{hy}h_t\)
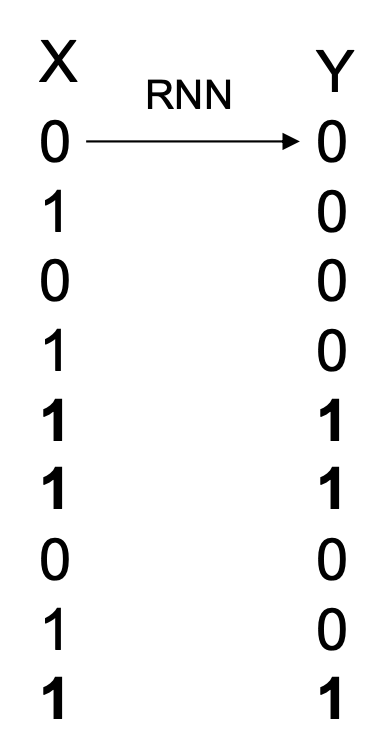
现在我们手动创建一个 RNN 来检测重复的 1,这是一个多对多的序列建模任务。
- 隐含状态需要捕捉先前的输入和当前的 \(x\) 值
- 简洁起见,令 \(f_W\) 和 \(f_y\) 均为 ReLU 函数,即:
- \(h_t=ReLU(W_{hh}h_{t-1}+W_{xh}x_t)\)
- \(y_t=ReLU(W_{hy}h_t)\)
- \(h_t = \begin{pmatrix}\text{Current} \\ \text{Previous} \\ 1\end{pmatrix}\),初始化 \(h_0 = (0, 0, 1)\)
核心代码段如下(完整代码链接
w_xh = np.array([[1], [0], [0]]) # (1)
w_hh = np.array([[0, 0, 0], # (2)
[1, 0, 0], # (3)
[0, 0, 1]]) # (4)
w_yh = np.array([1, 1, -1]) # (5)
x_seq = [0, 1, 0, 1, 1, 1, 0, 1, 1]
h_t_prev = np.array([[0], [0], [1]])
for t, x in enumerate(x_seq):
h_t = relu(w_hh @ h_t_prev + (w_xh @ x))
y_t = relu(w_yh @ h_t)
h_t_prev = h_t
- 右侧项
- x = 0 -> [0, 0, 0]
- x = 1 -> [1, 0, 0]
- 0 代表左侧项首行(仅用来自右侧项的值)
- 将“当前”的值从之前的隐藏状态复制过来,成为“之前”
- 保留底部的 1(有利于输出)
- max(current + previous - 1, 0)
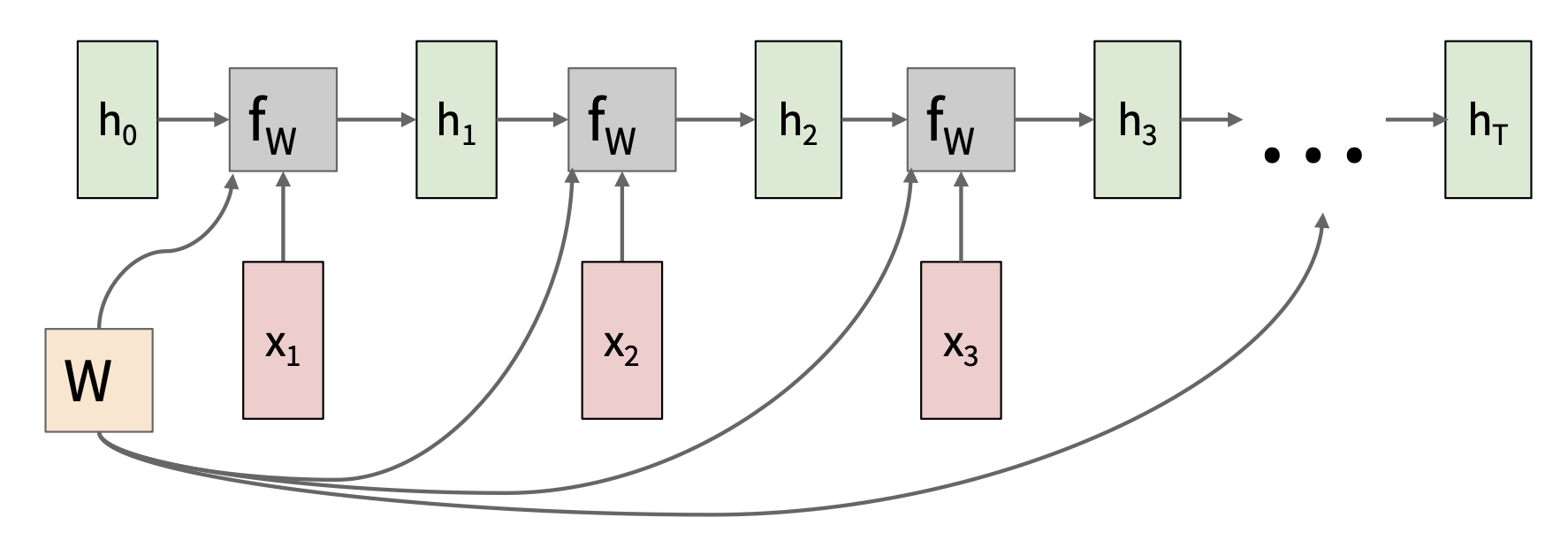
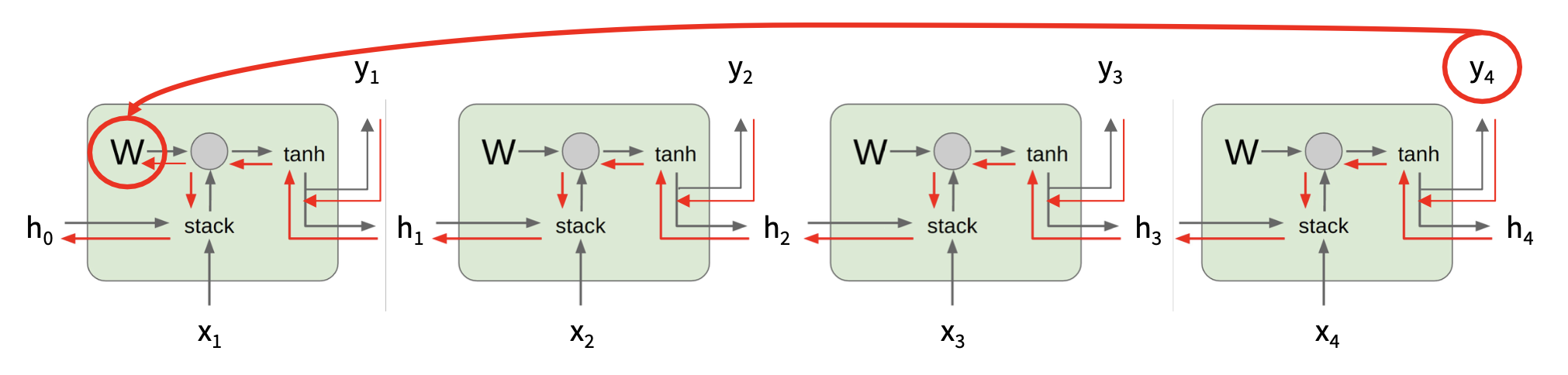
Computational Graphs⚓︎
每一步重复使用相同的权重矩阵:
-
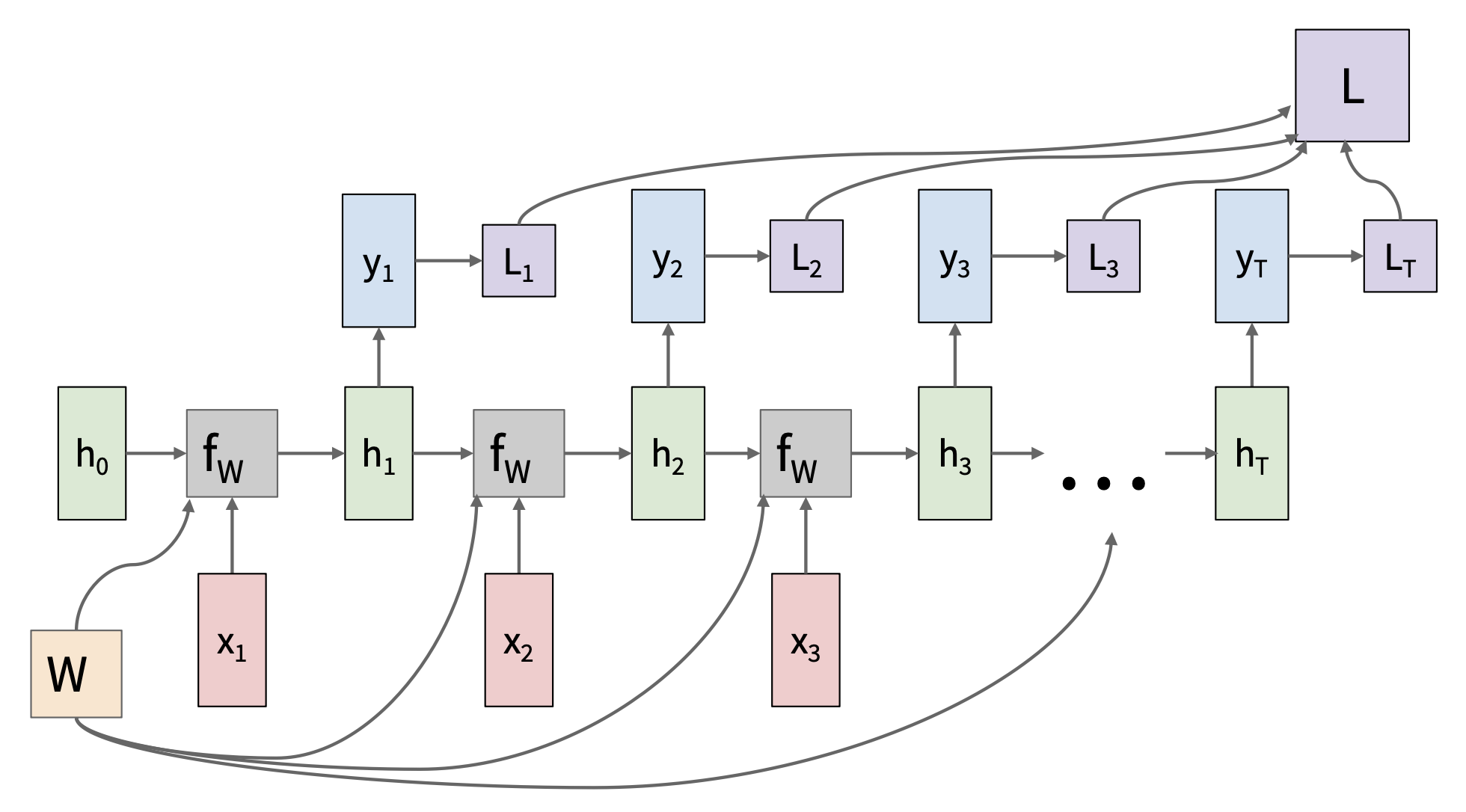
多对多:
-
多对一:将输入序列编码为单个向量
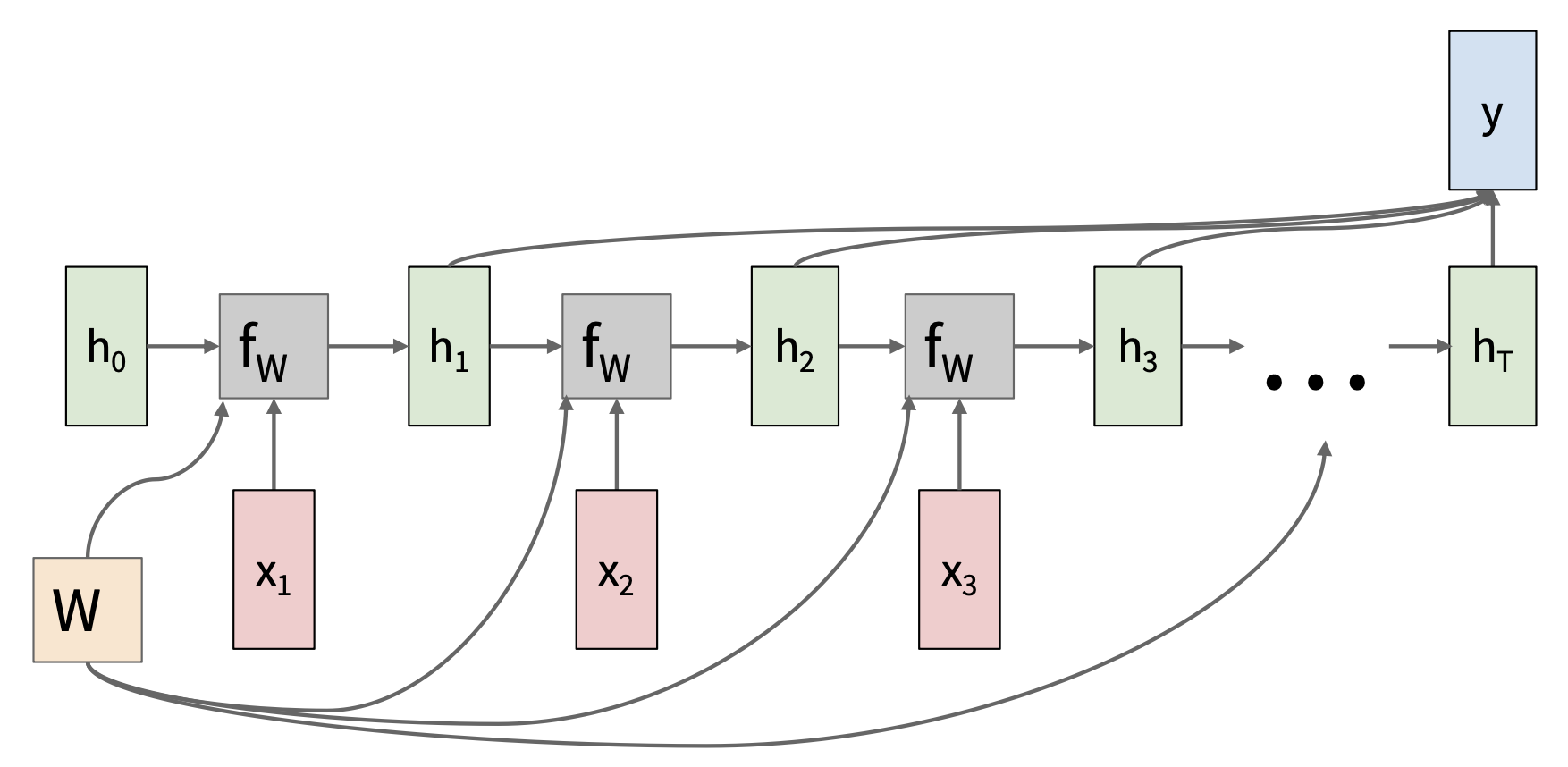
-
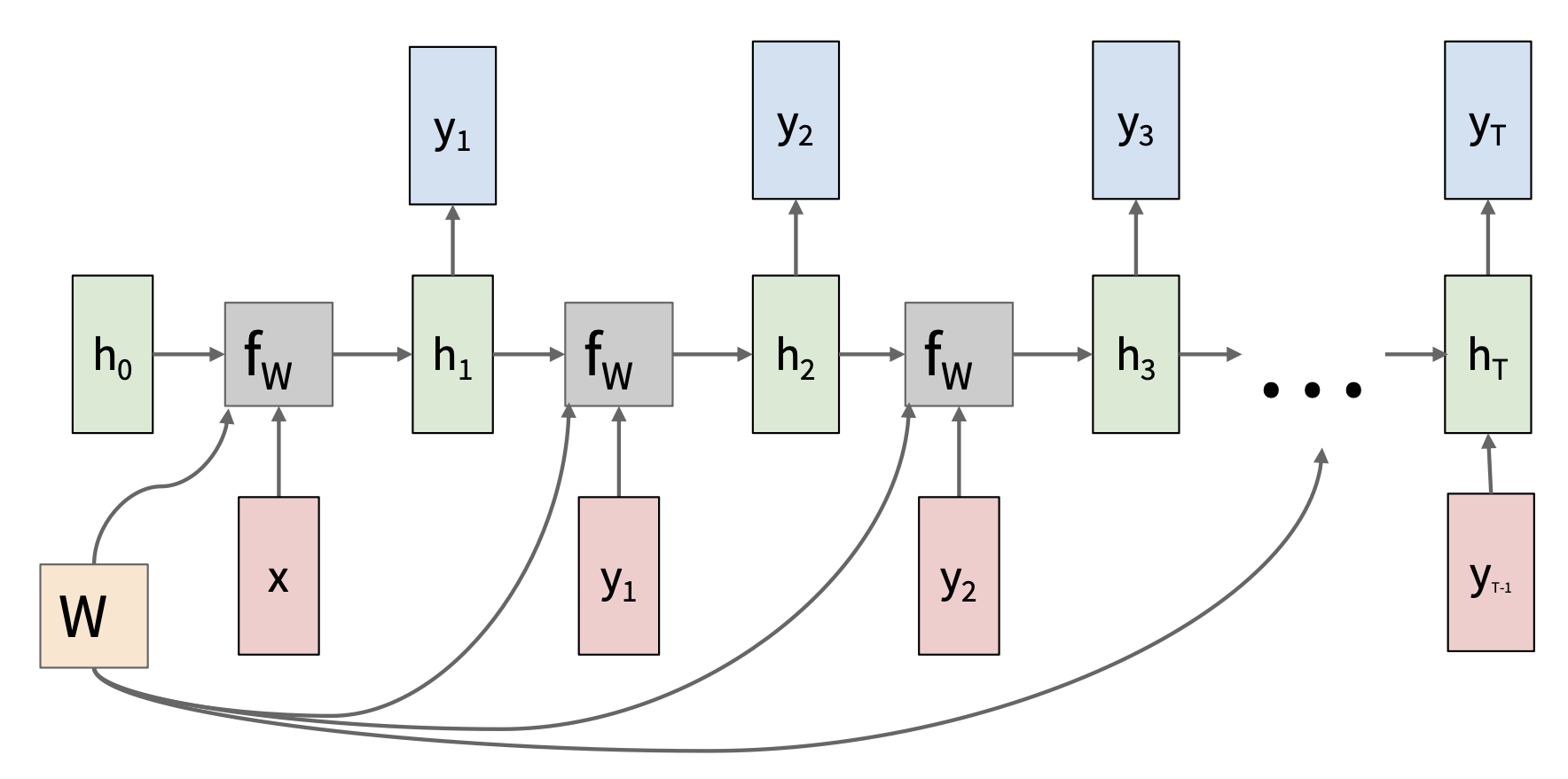
一对多:从单个输入向量中产生输出序列
Backpropagation⚓︎
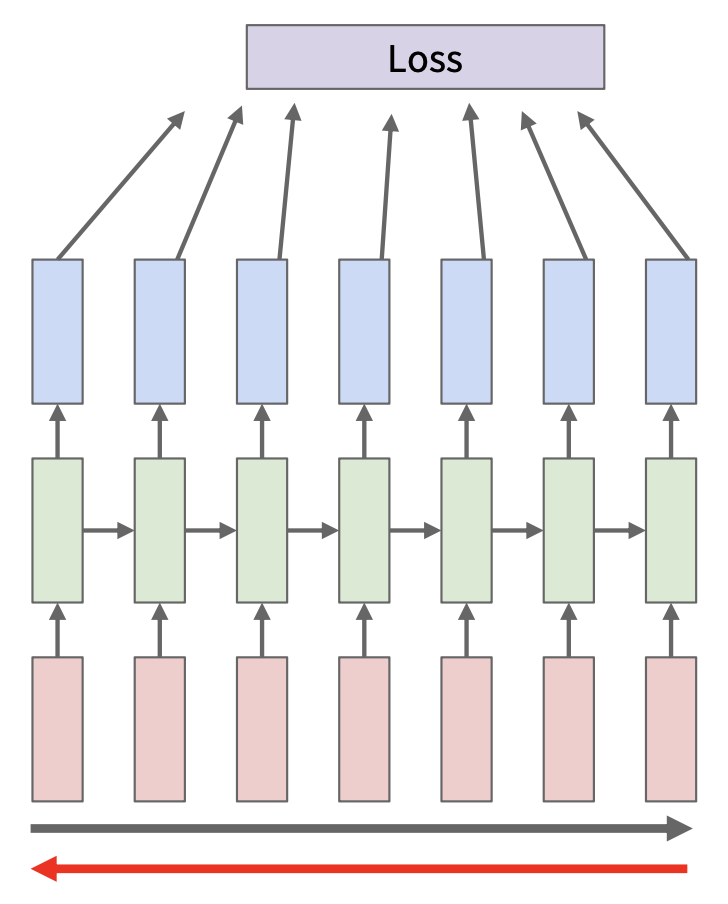
在 RNN 中,向前遍历整个序列以计算损失,然后向后遍历整个序列以计算梯度(反向传播
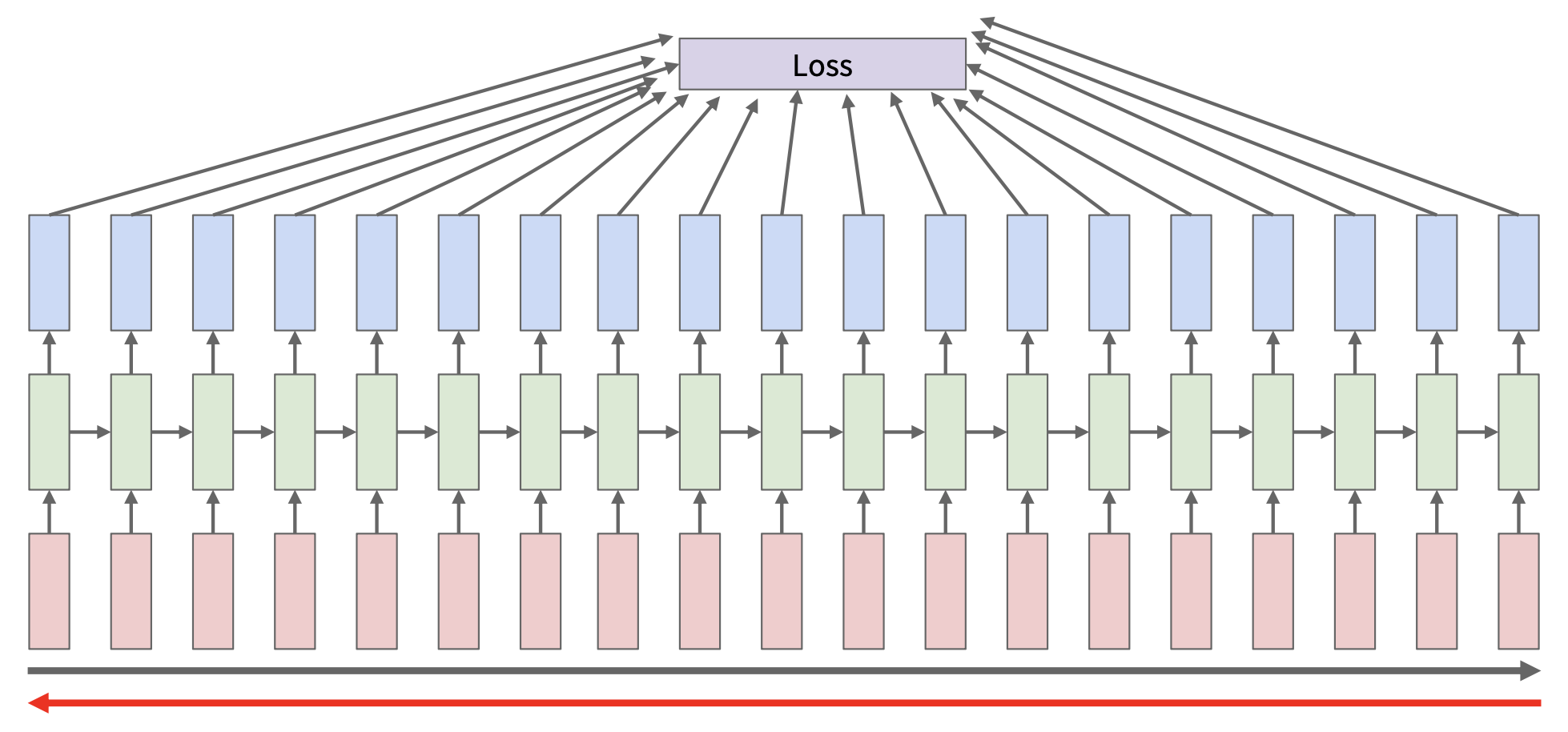
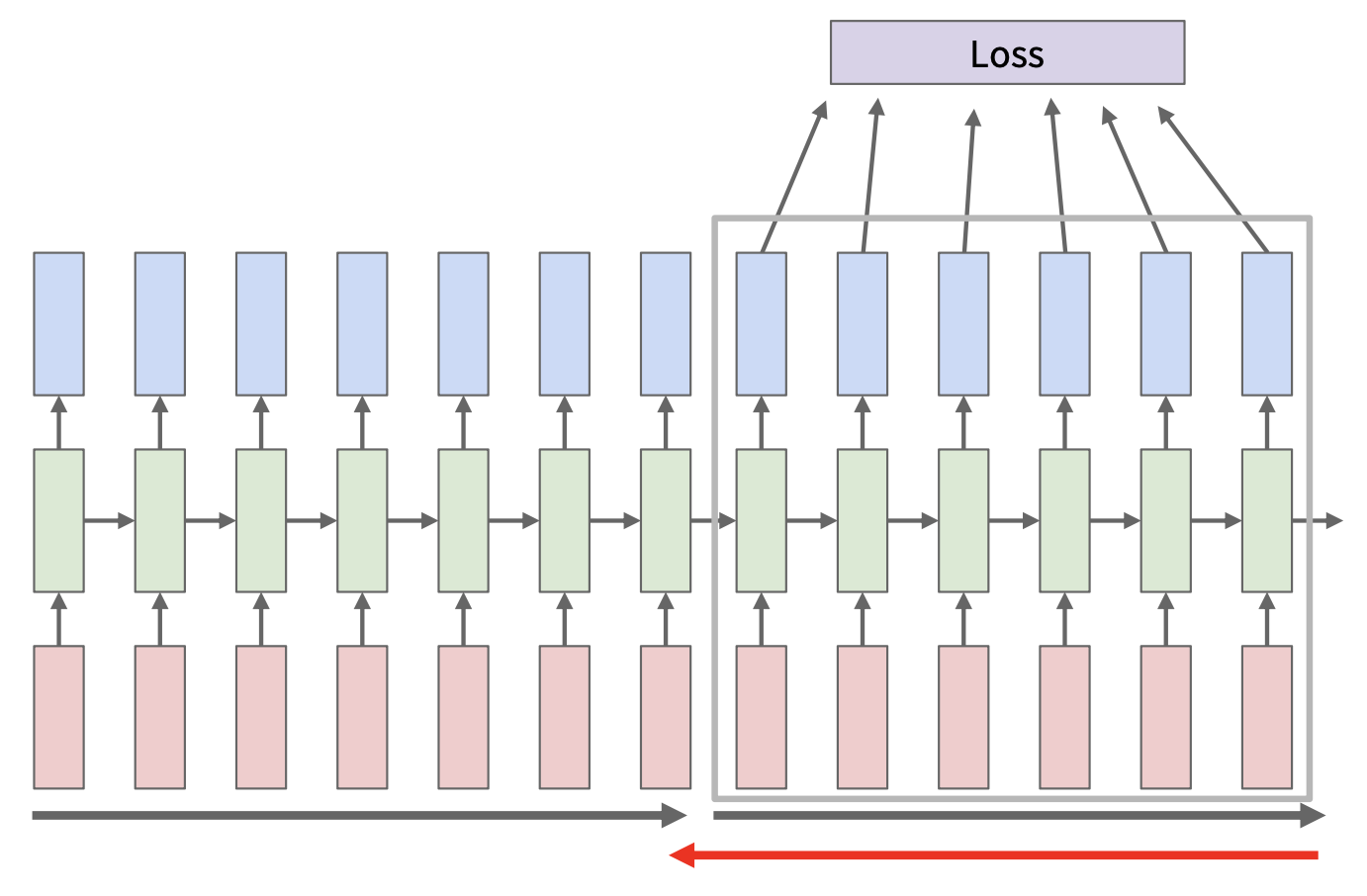
但对 RNN 而言,这样做会在长序列上消耗大量内存。因此在 RNN 上,实际做的是随时间截断的反向传播(truncated backpropagation through time, TBTT):
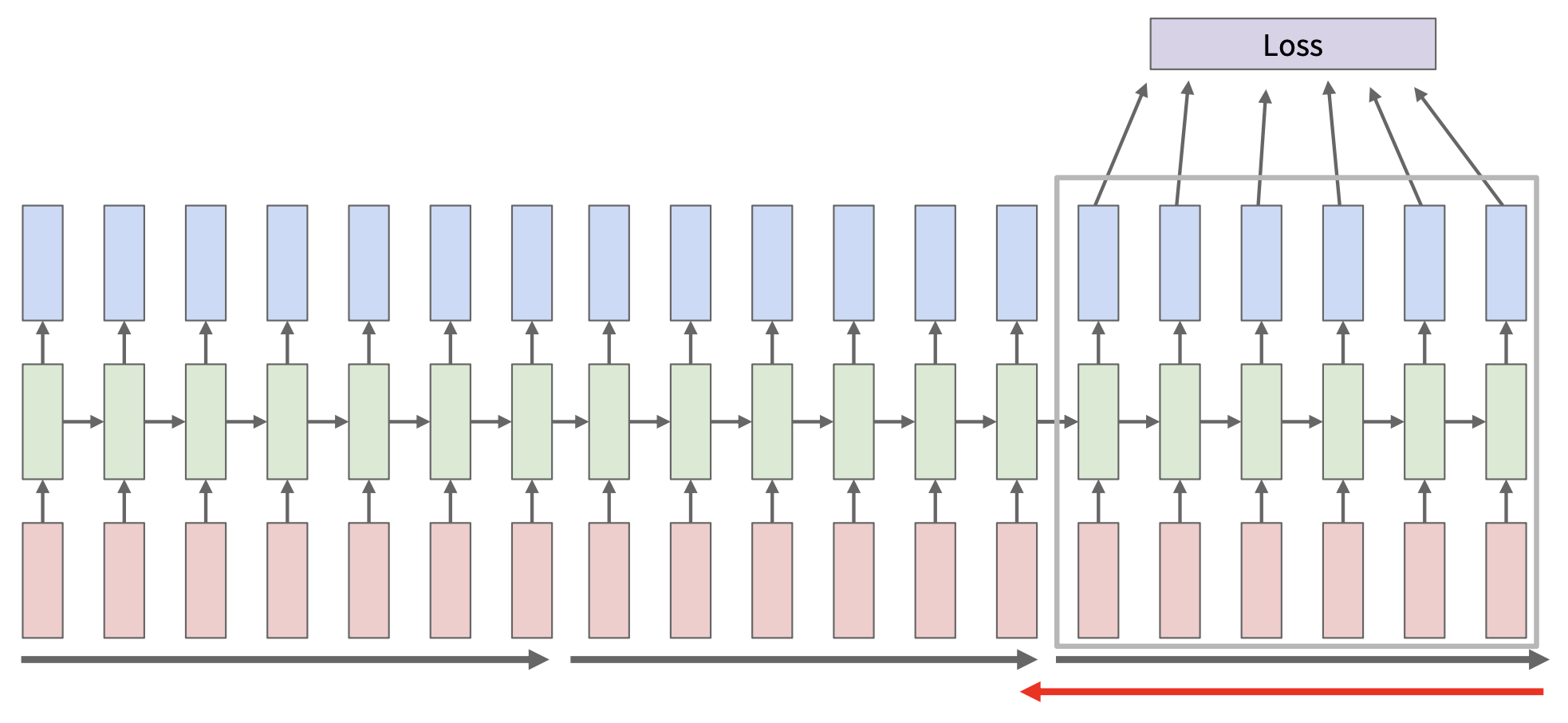
- 在序列块(chunks) 中向前和向后遍历计算,而不是一次考虑整个序列
- 永远向前传递隐含状态,但仅在较少的步骤中进行反向传播
- 仍然在每个时间步计算梯度,依赖于上游梯度(每个时间步不再有损失)
A More Pratical Example⚓︎
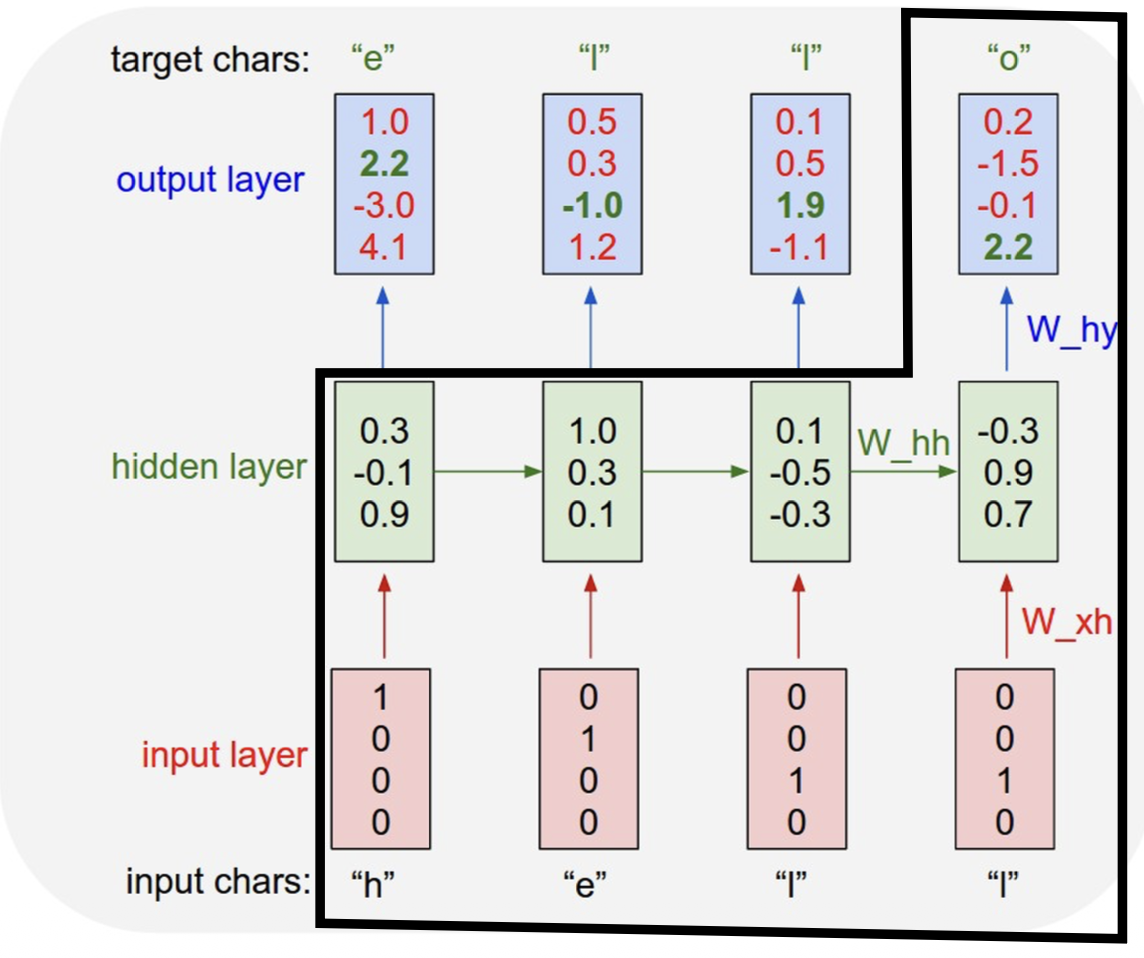
用 RNN 搭建一个字符级的语言模型 (character-level language model)
- 字母表:[h, e, l, o]
- 样例训练序列:"hello"
- 给定前 t - 1 个字符,生成第 t 个字符
测试时每次仅采样一个字符,将输出反馈给模型(作为下一次的输入
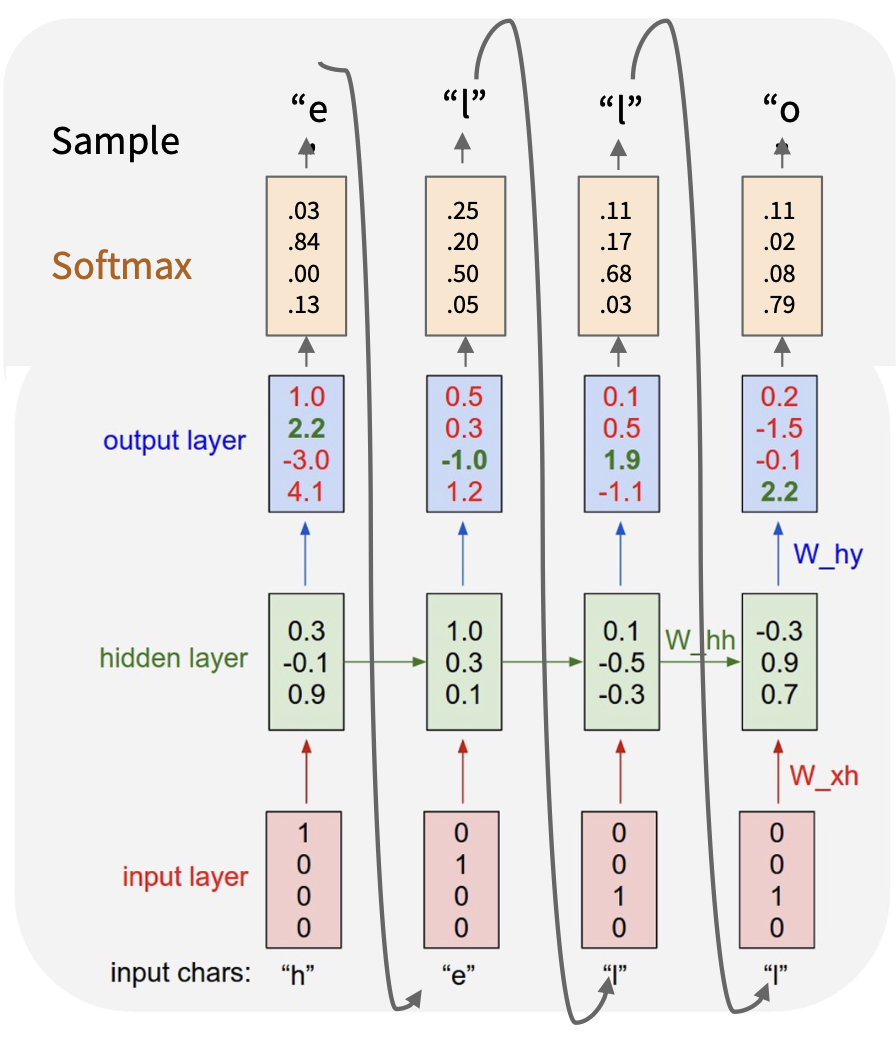
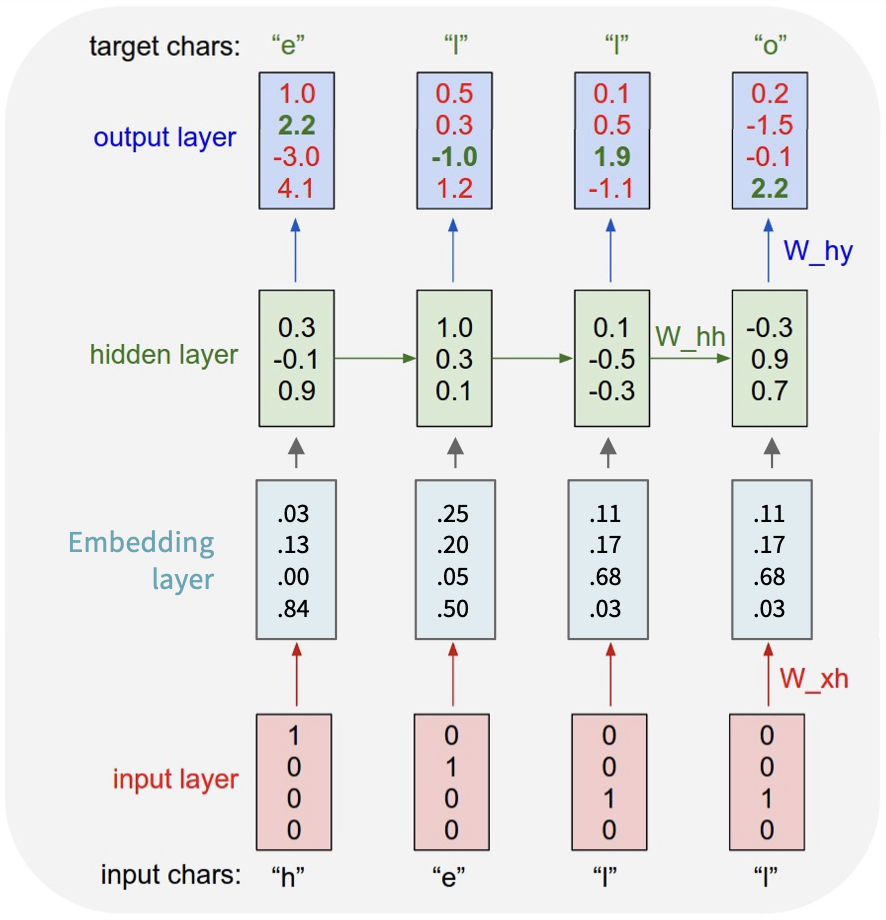
矩阵 - 独热向量(输入)乘法的结果是从权重矩阵中提取某一列。
我们通常在输入层和隐藏层之间放置一个单独的嵌入层。
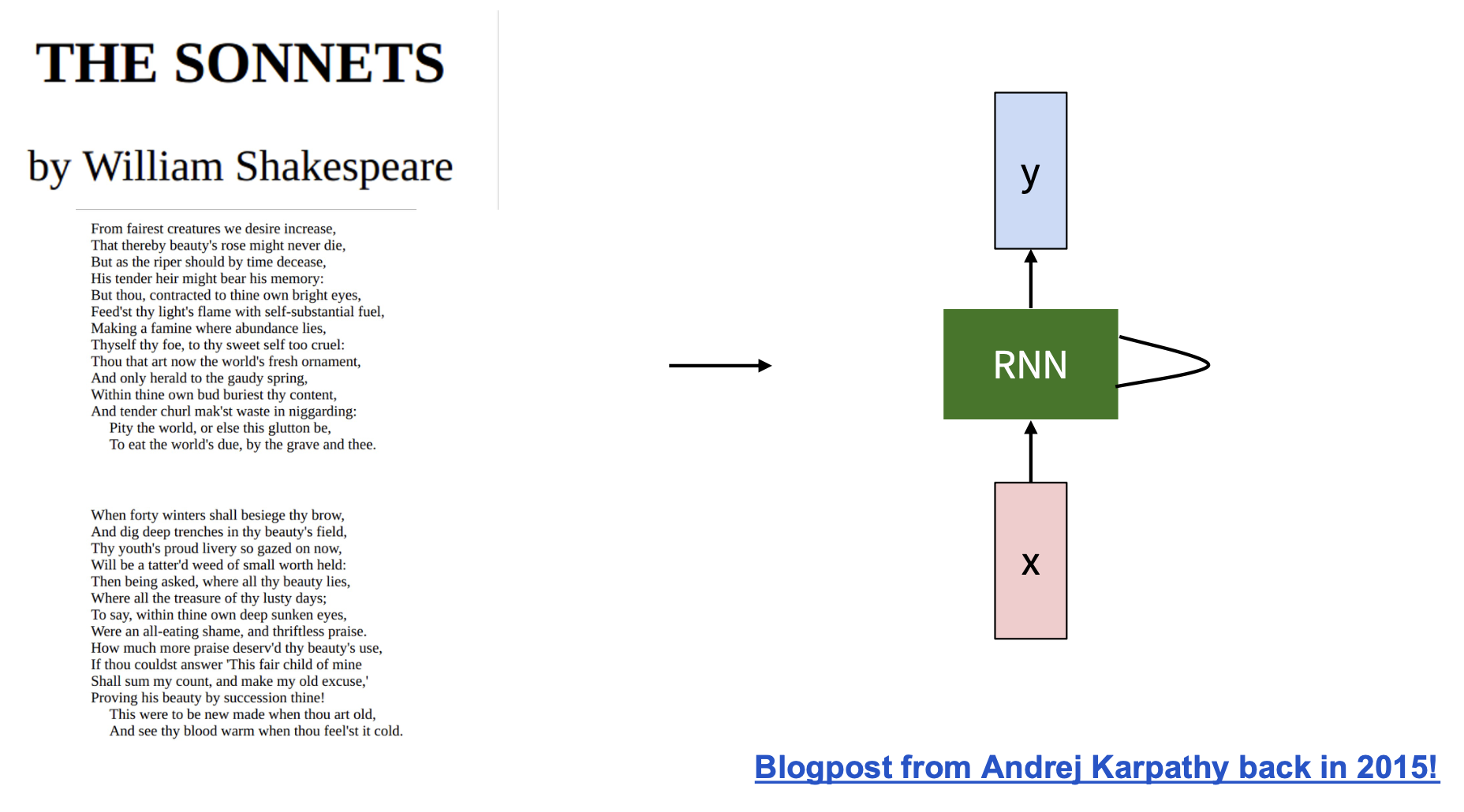
源代码仅 112 行(Python
实际应用
让 RNN 基于莎士比亚的作品训练:
可以看到,随着训练次数的增加,模型生成文本的质量越来越高:
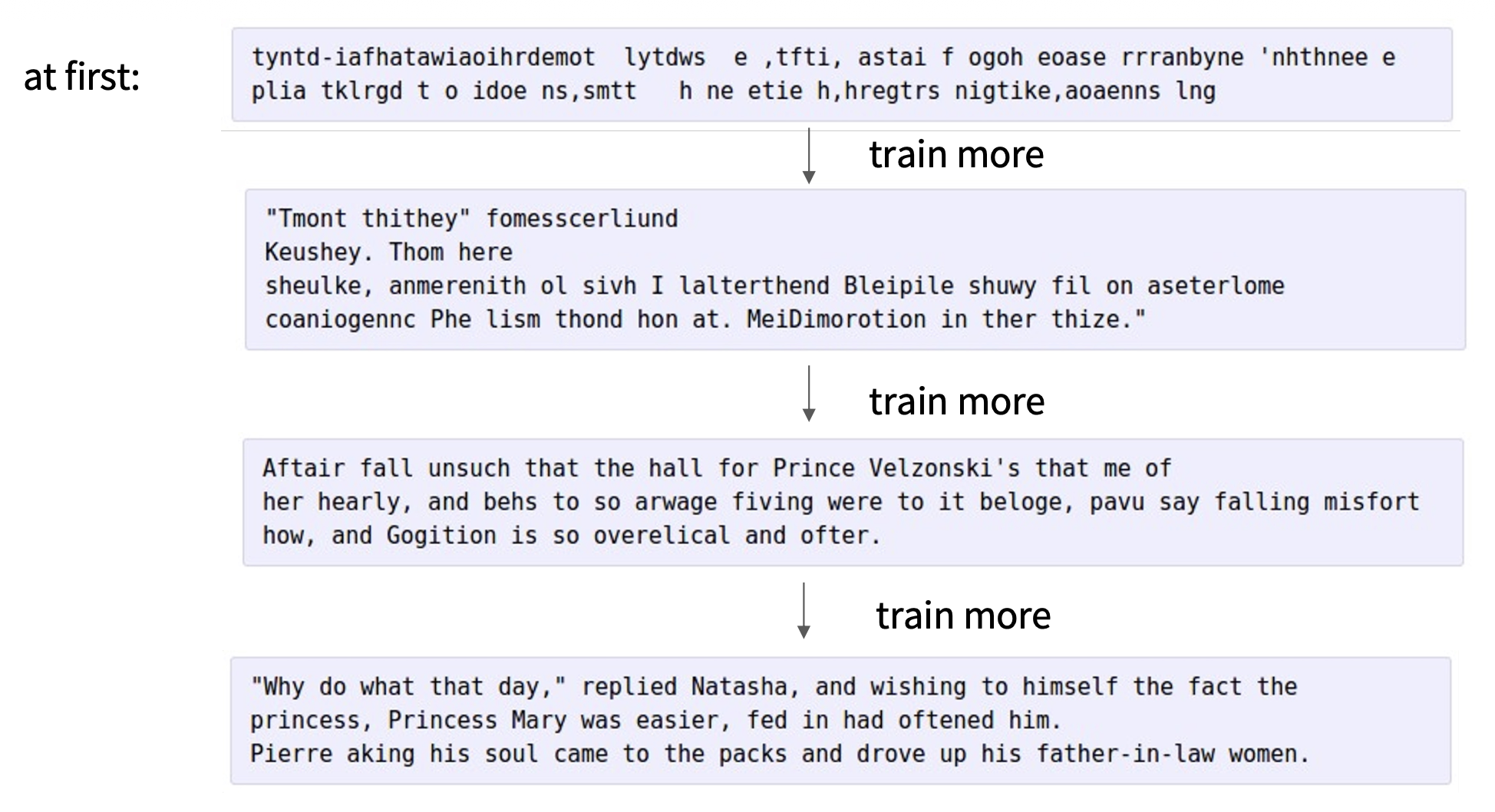
最终成果:
让模型阅读 Linux 源码,最终它能生成这样的 C 代码:
static void do_command (struct seg_file *m, void *v)
{
int column = 32 << (cmd[2] & 0x80);
if (state)
cd = (int) (int_state ^ (in_8(&ch->ch_flags) & Cmd) ? 2: 1);
else
seg = 1;
for (i = 0; i < 16; i++) {
if (k & (1 << 1))
pipe = (in_use & UMXTHREAD_UNCCA) +
((count & 0x00000000fffffff8) & 0x000000f) << 8;
if (count == 0)
sub(pid, ppc_md.kexec_handle, 0x20000000) ;
pipe_set_bytes(1, 0) ;
}
/* Free our user pages pointer to place camera if all dash */
subsystem_info = &of_changes[PAGE_SIZE];
rek_controls(offset, idx, &soffset);
/* Now we want to deliberately put it to device */
control_check_polarity(&context, val, 0);
for (i = 0; i < COUNTER; i++)
seą_puts(s, "policy ");
}
现在的 OpenAI Codex, GitHub Copilot, Cursor IDE 已经具备相当不错的代码生成能力了。
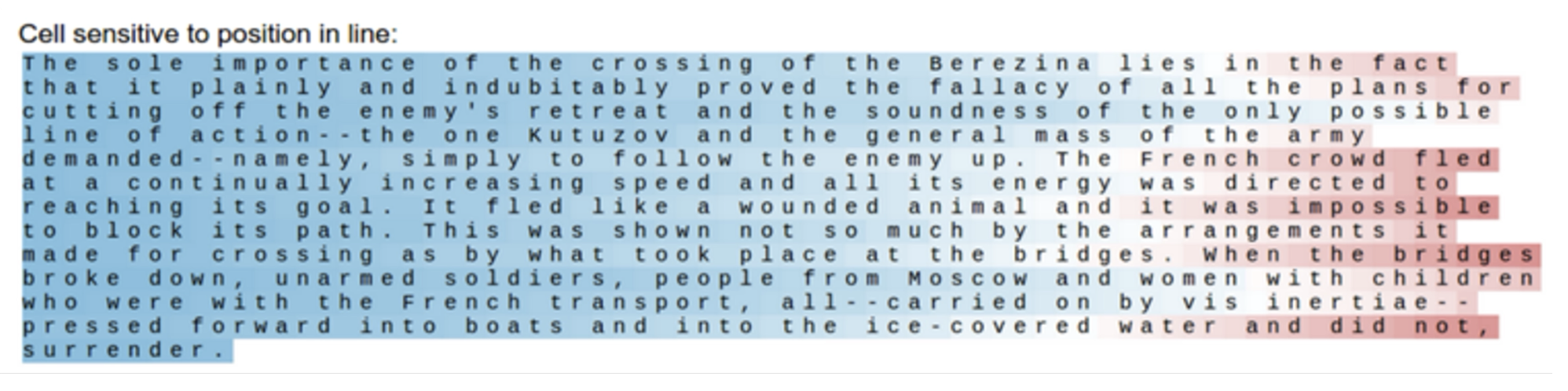
Searching for Interpretable Cells⚓︎
我们将展开后的 RNN 中的隐含状态看作神经网络上的一个个细胞。我们希望能找到那些可解释的(interpretable) 细胞,即有明确功能和目的的细胞,比如说:
-
引用检测细胞

-
行长度追踪细胞
-
if语句细胞
-
注释细胞
-
代码深度细胞
RNN 的优缺点
-
优点:
- 能处理任意长度的输入(无上下文长度)
- 步骤 t 的计算(理论上)能使用很多步前的信息
- 模型大小不会因输入变长而增加
- 相同的权重作用在每一个时间步上,所以在输入的处理方式上具有对称性
-
缺点:
- 循环计算很慢
- 实际上难以访问很多步前的信息
Applications⚓︎
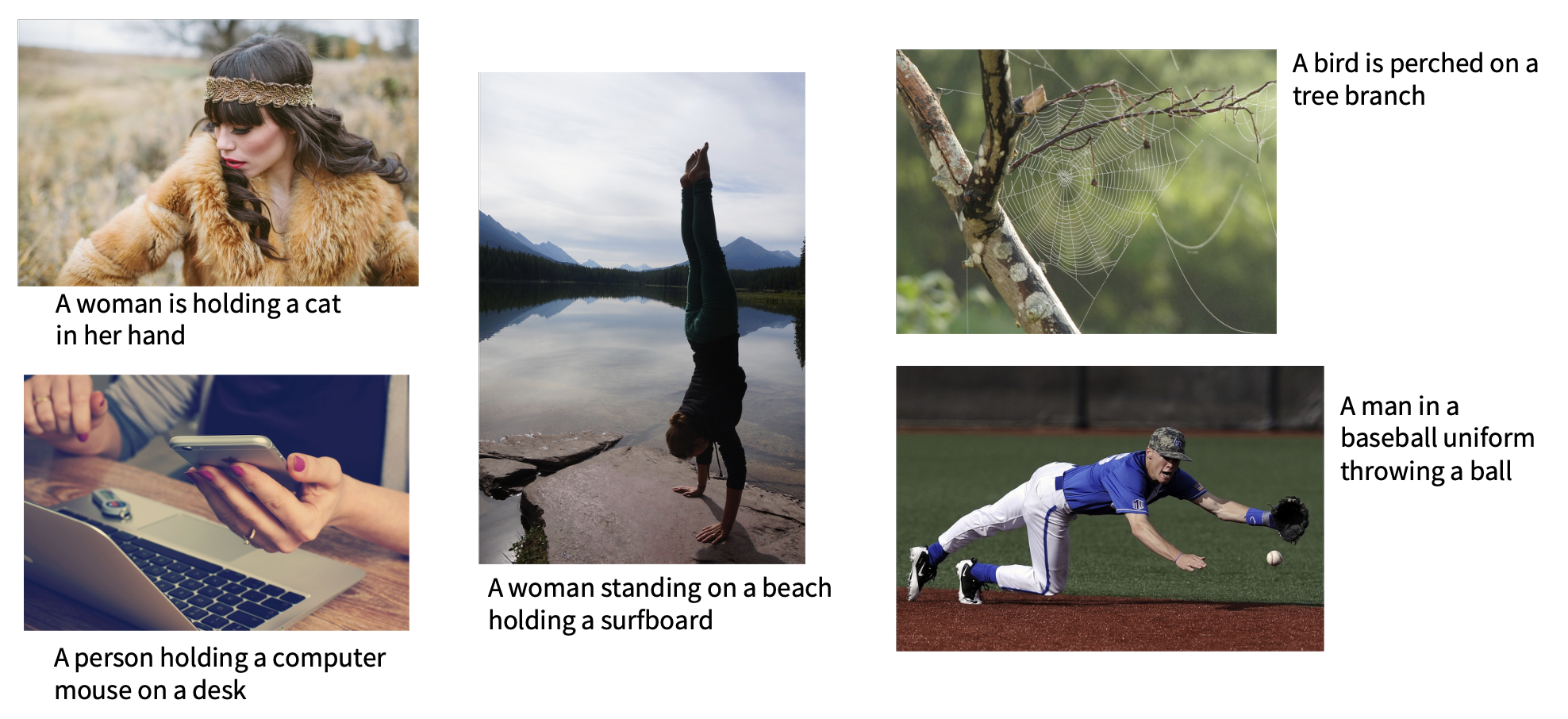
Image Captioning⚓︎
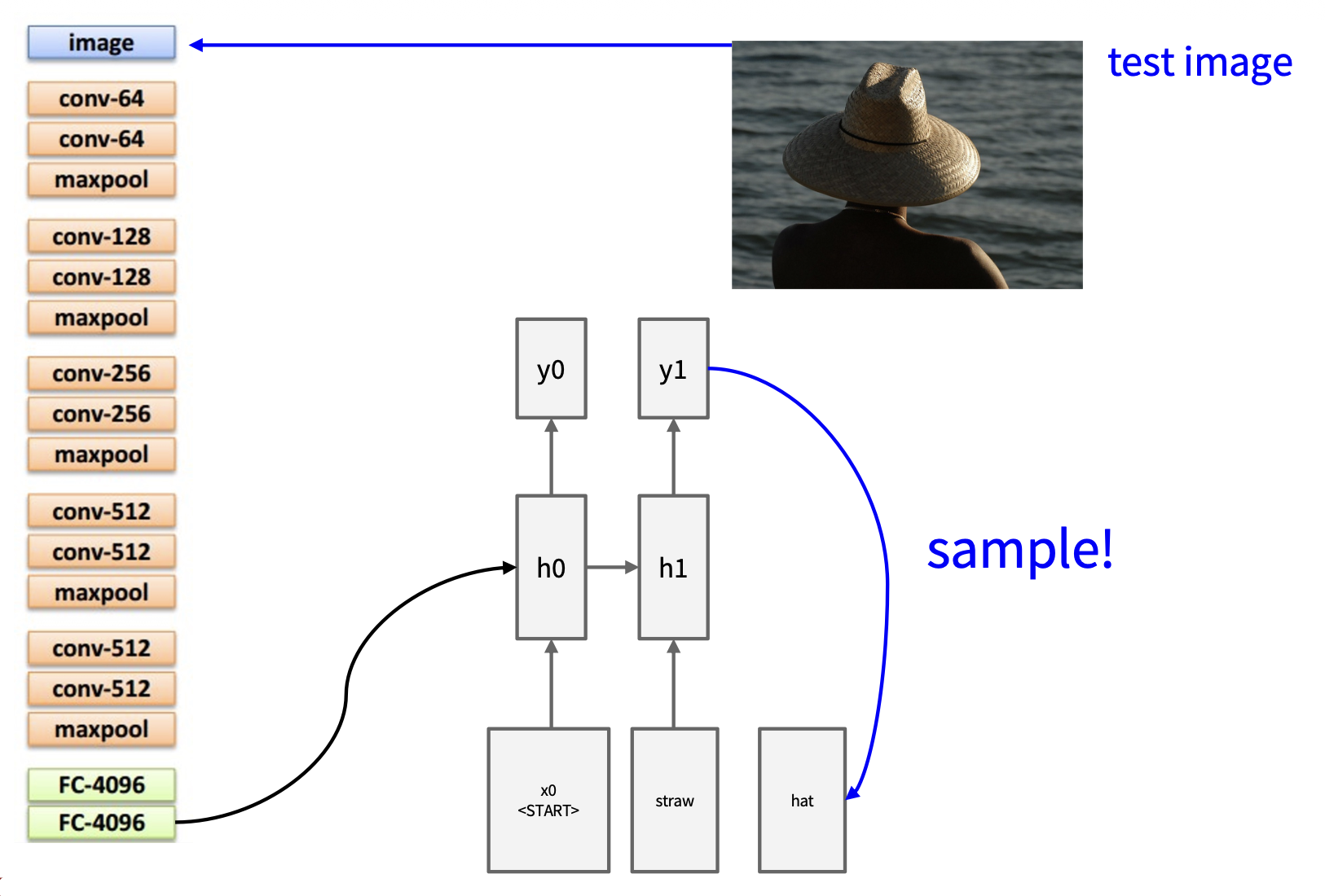
图像描述的模型同时用到了 CNN 和 RNN。
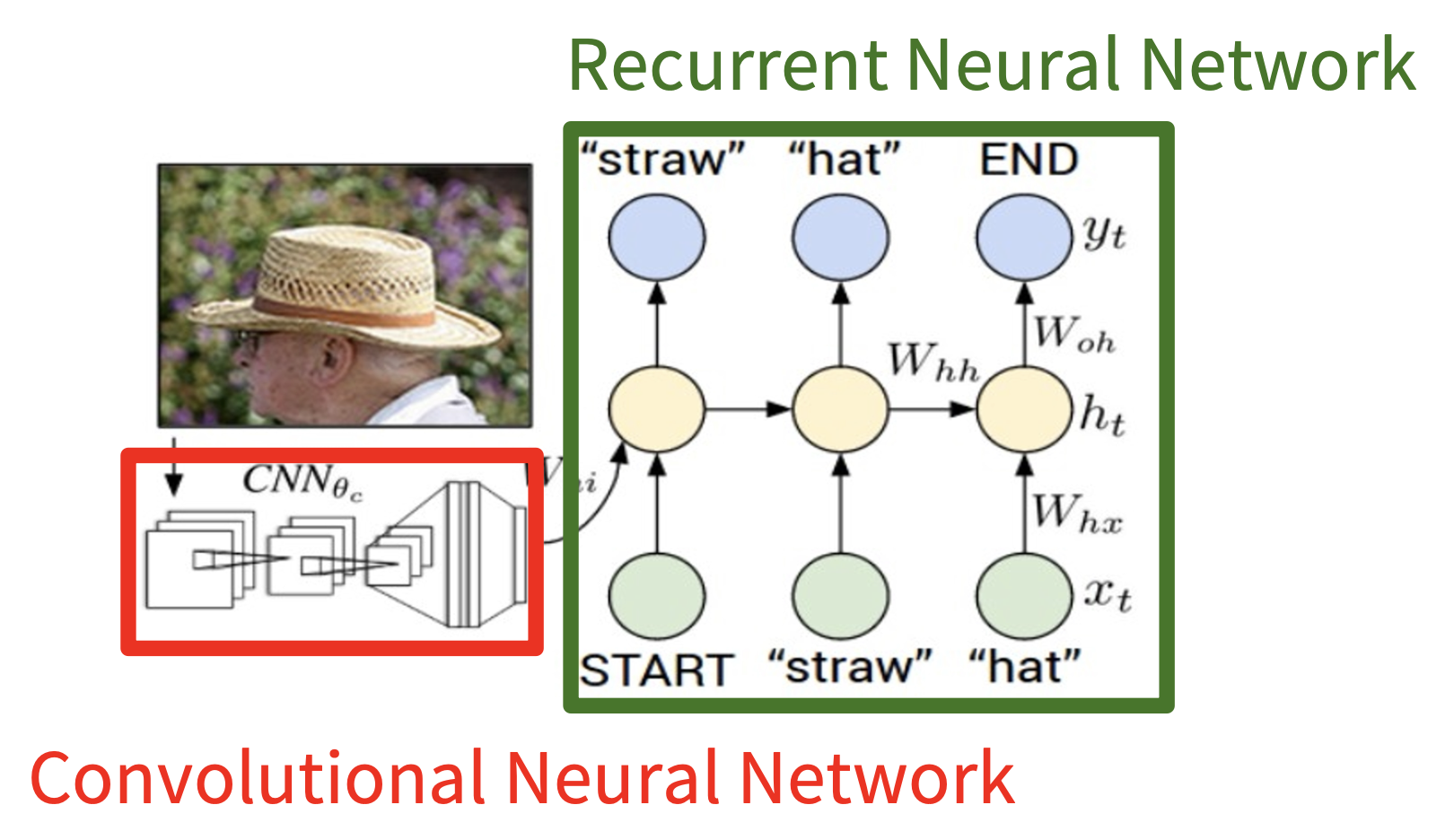
去掉了最后的全连接层
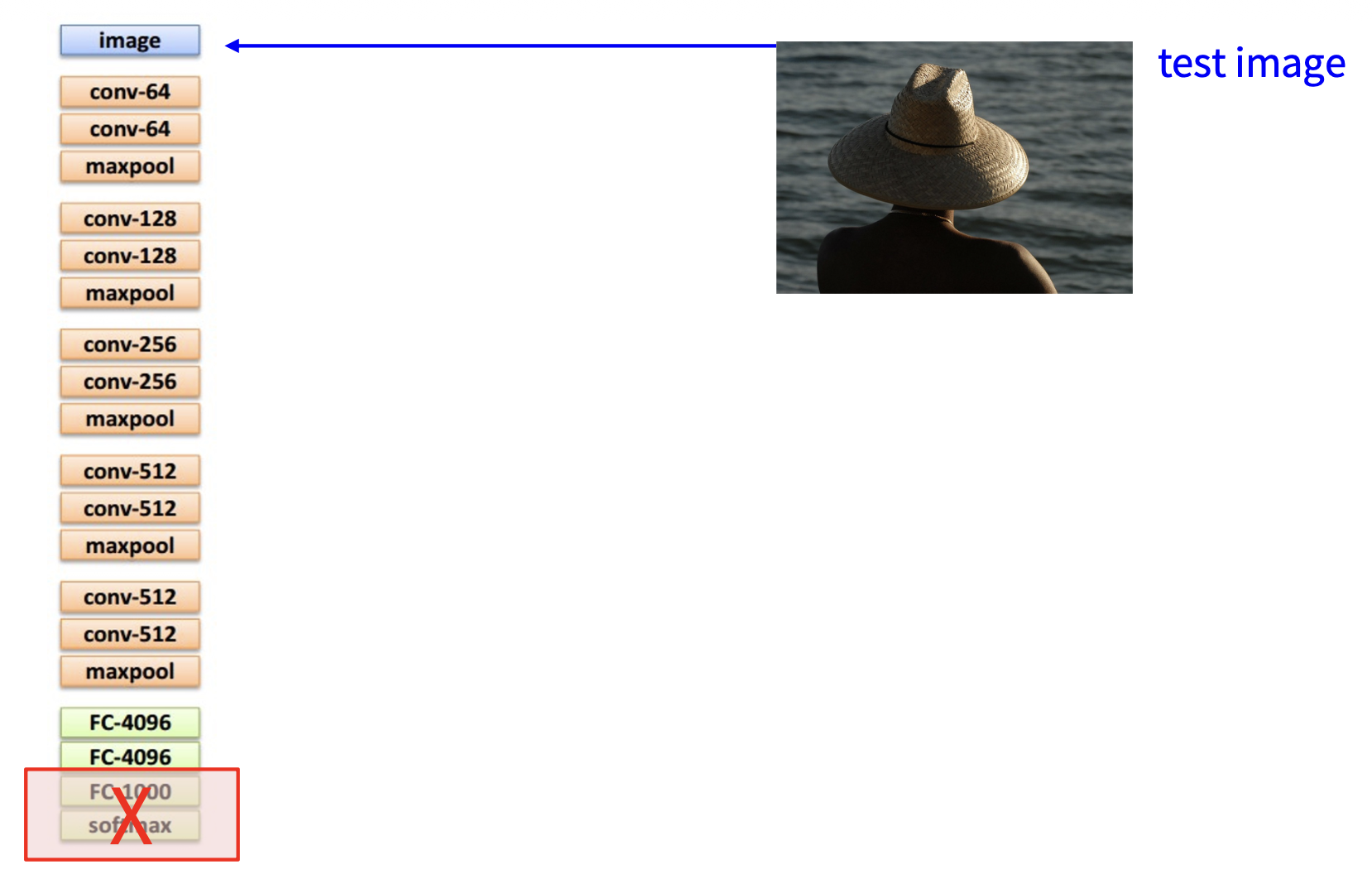
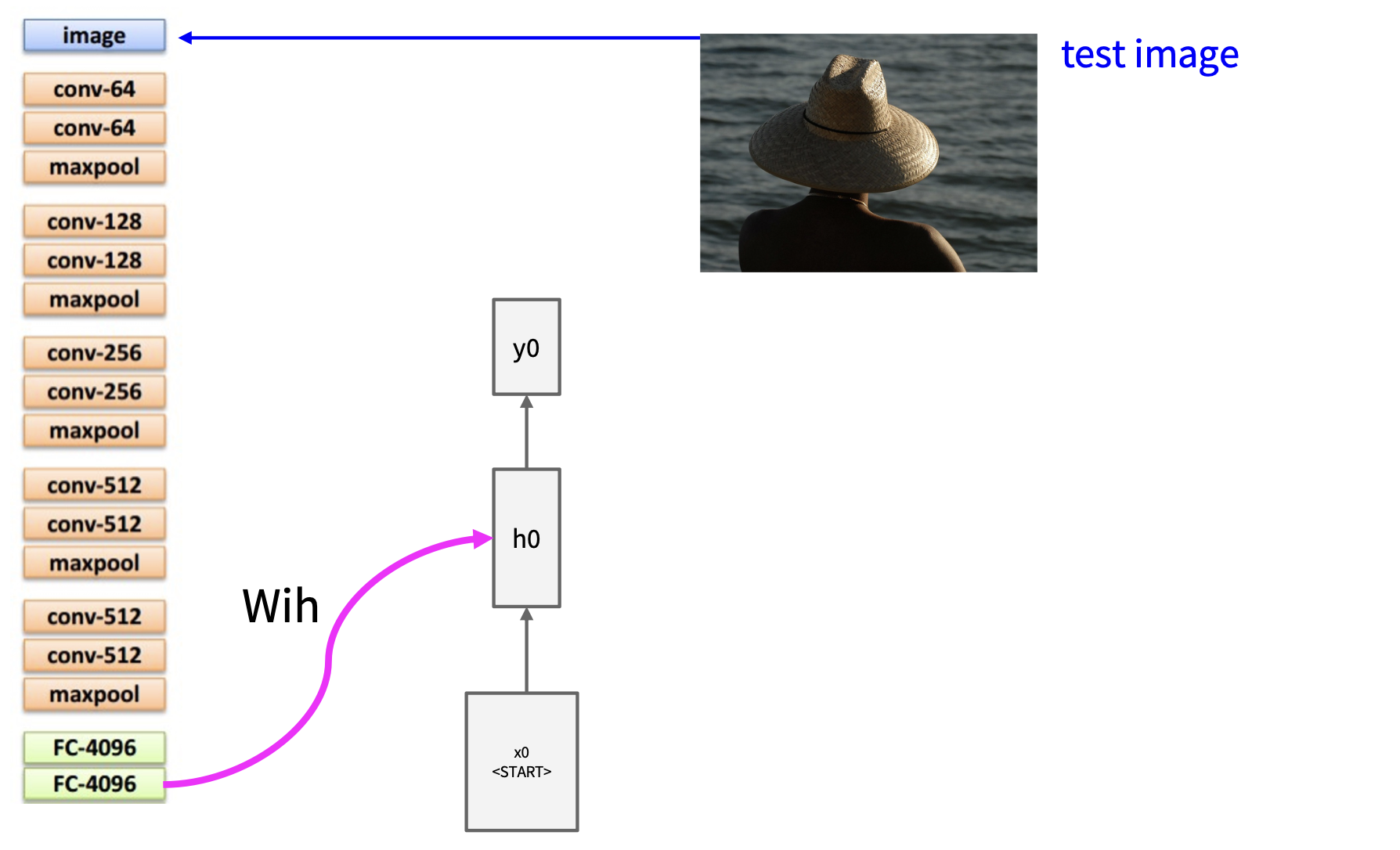
- 图像经过 CNN 后产生权重矩阵 \(W_{ih}\) 给 RNN
- 而 RNN 的隐含状态方程变为了 \(h = \tanh (W_{xh} \cdot x + W_{hh} \cdot h \textcolor{red}{+ W_{ih} \cdot v})\)
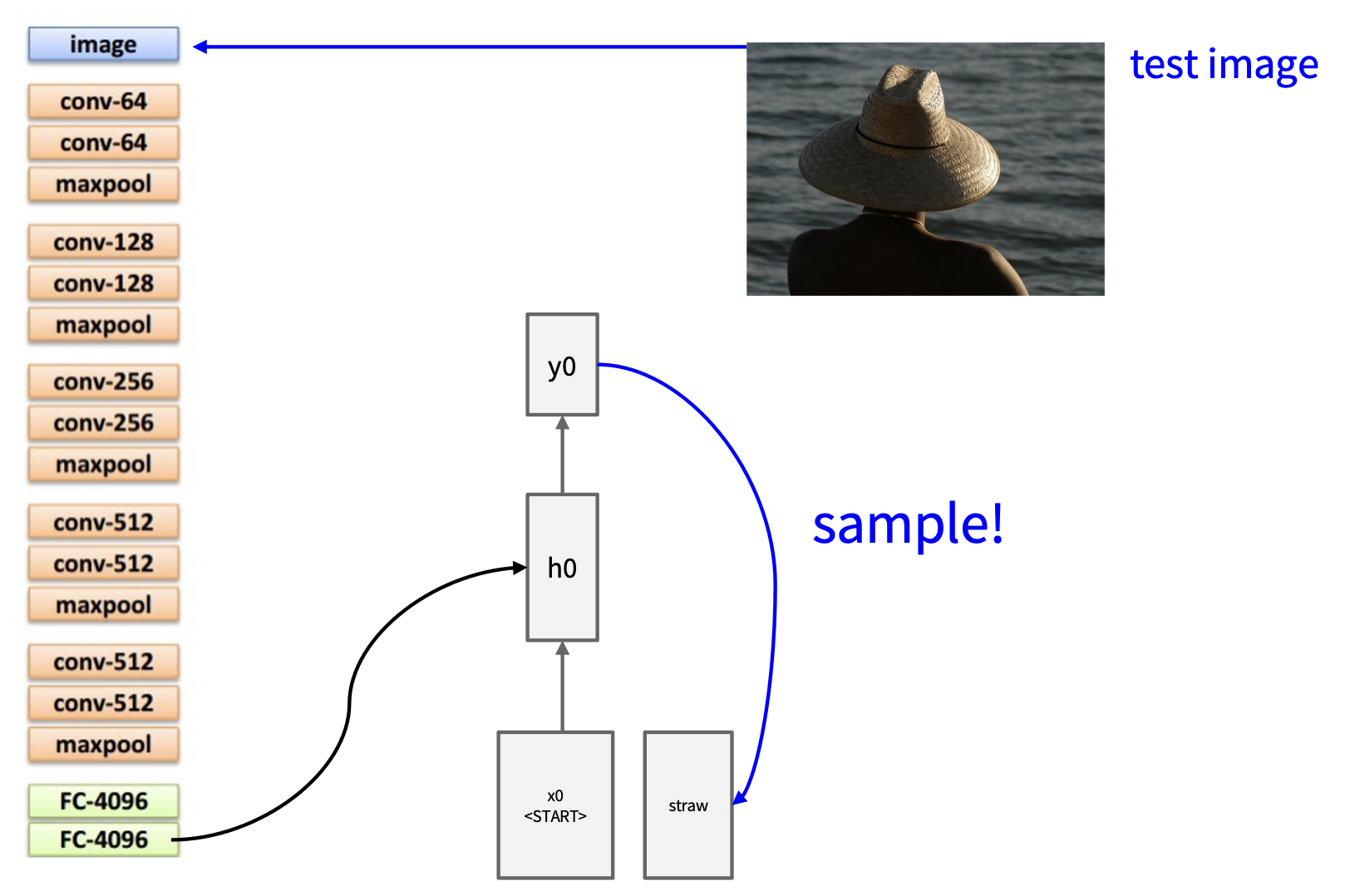
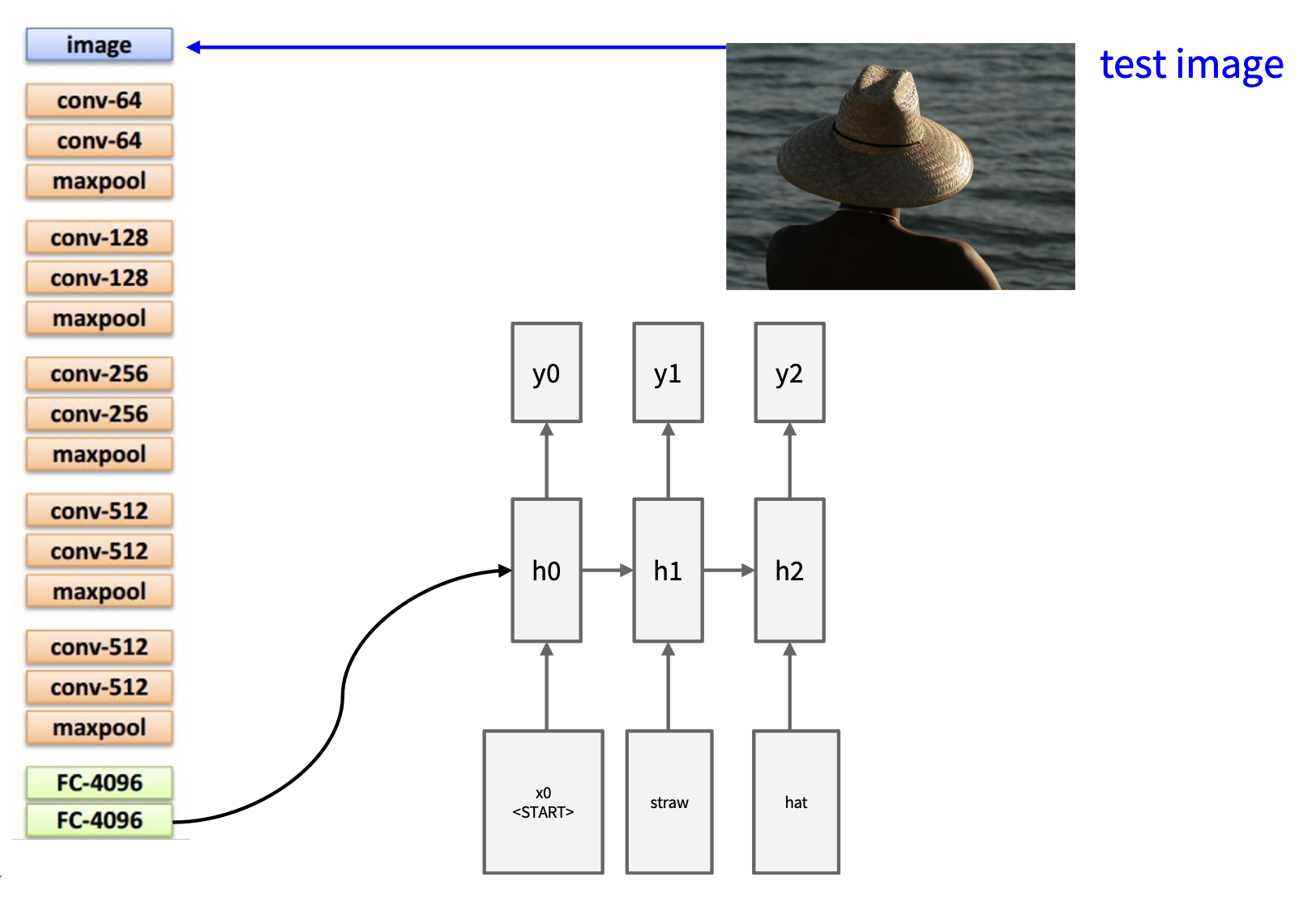
采样前一次输出结果,作为下一次的输入:
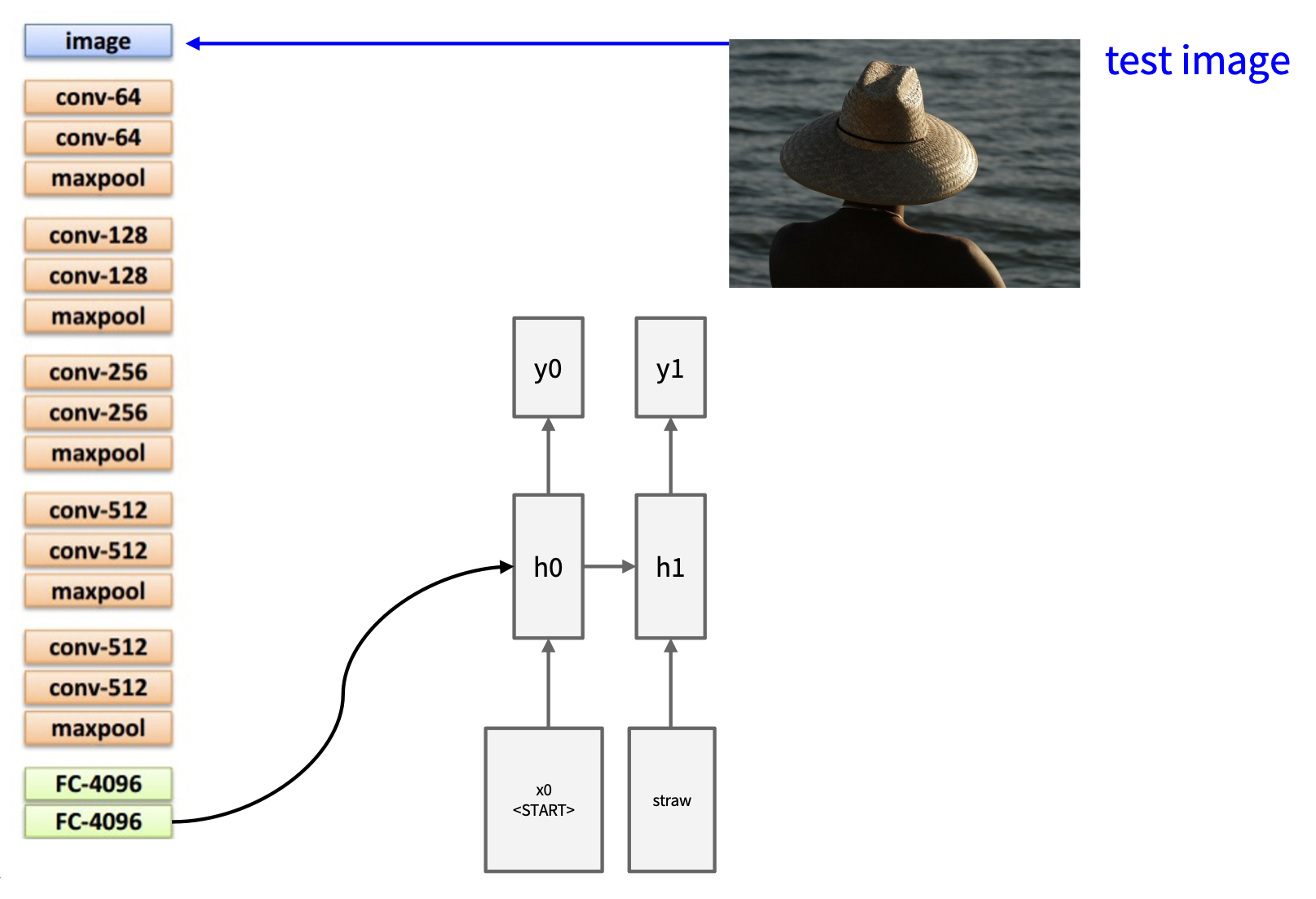
同上
若采样发现
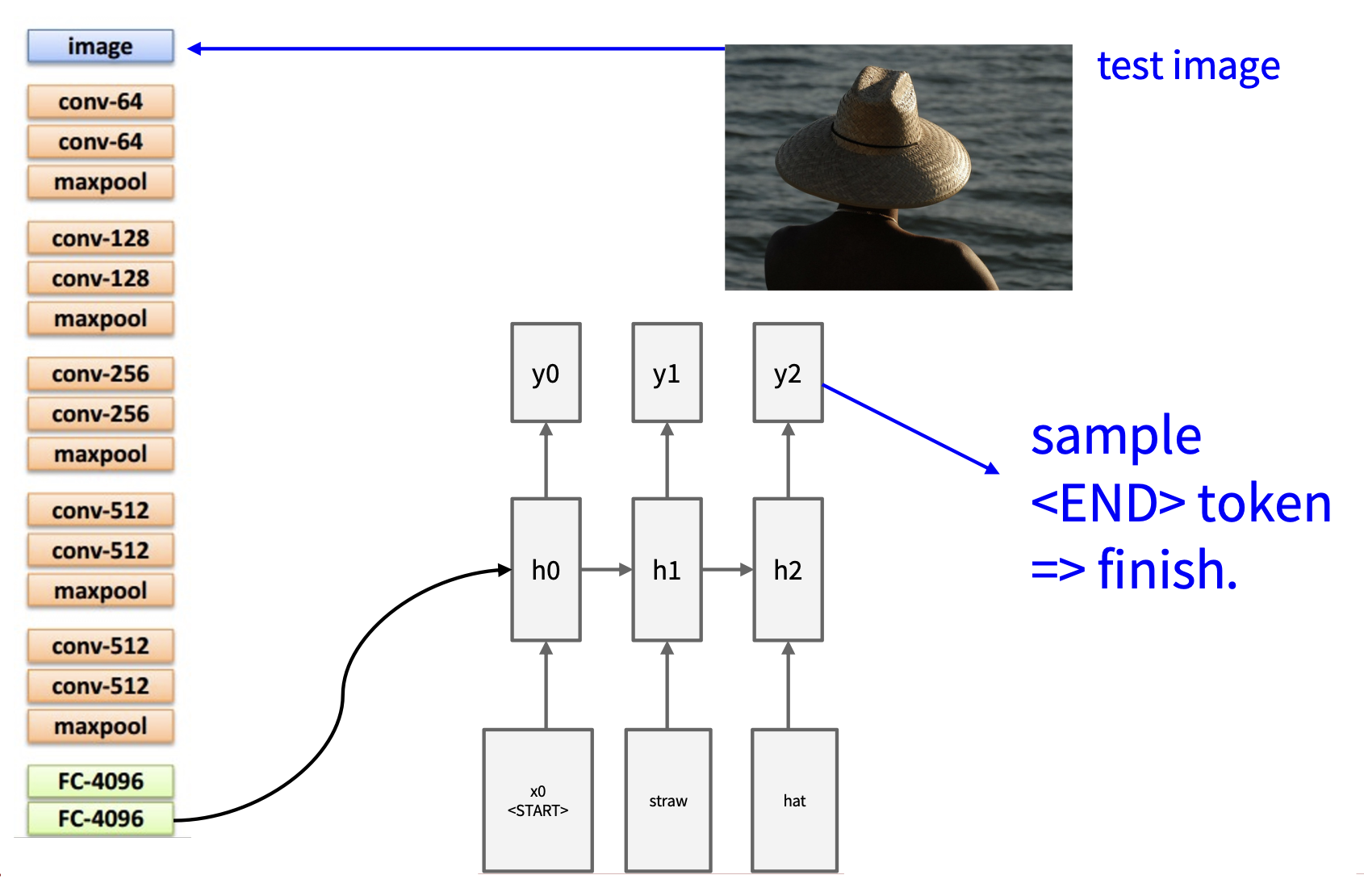
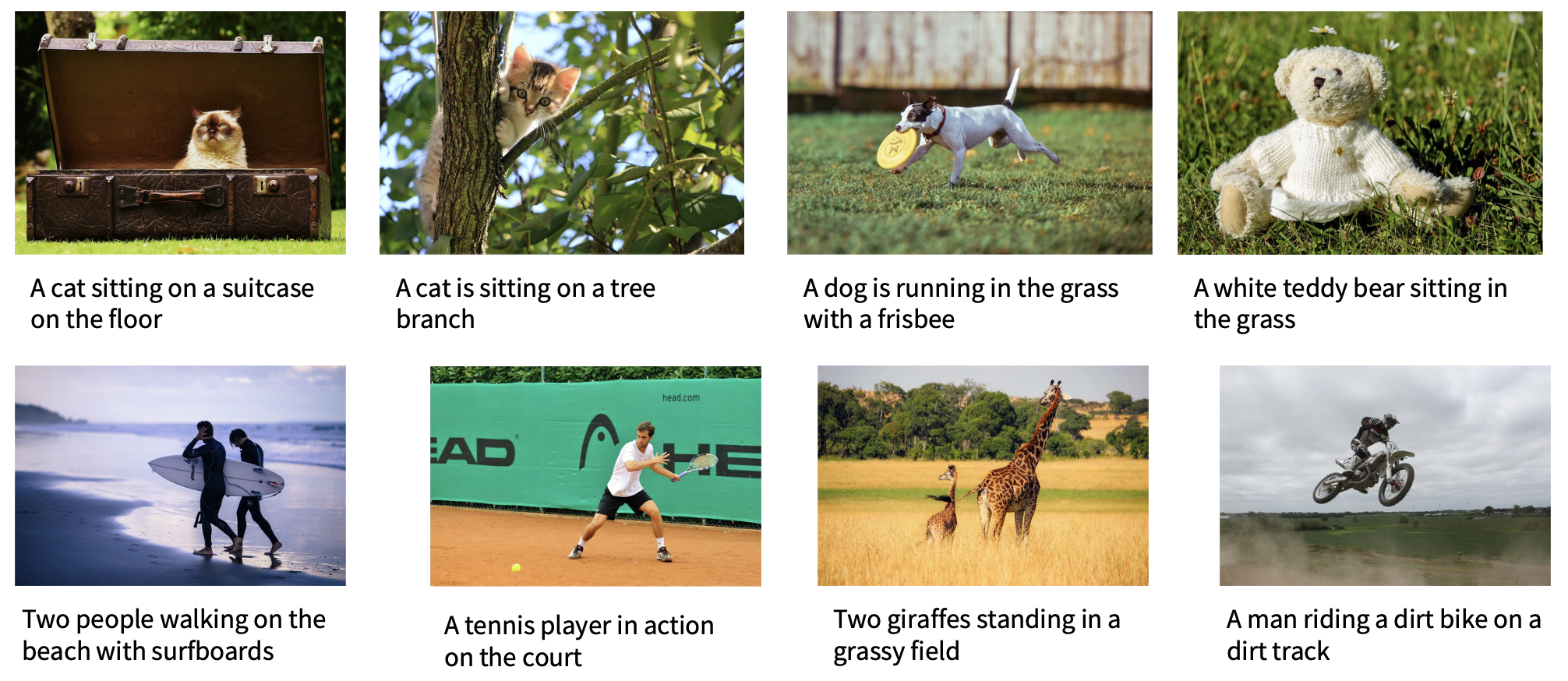
结果:
-
成功例子:
-
失败例子:
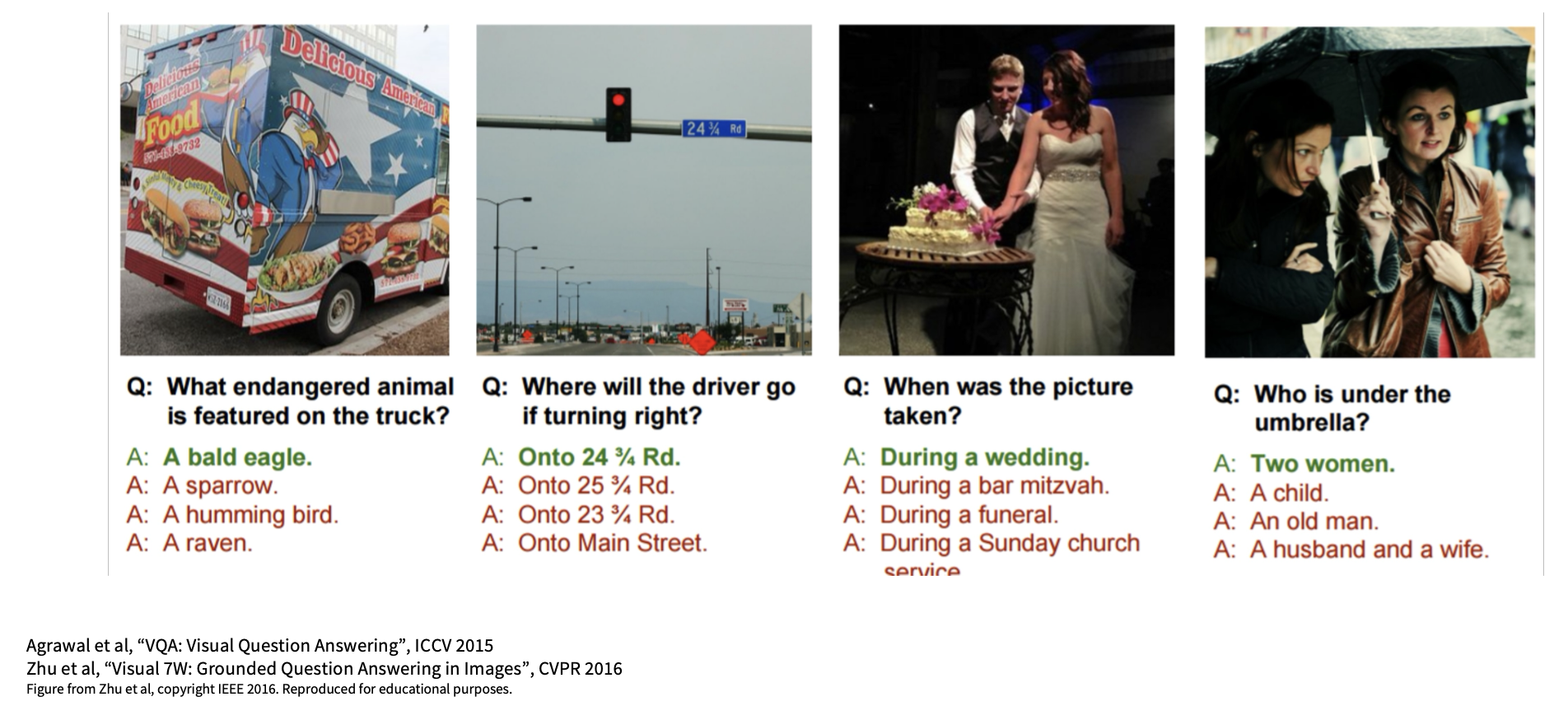
Visual Question Answering (VQA)⚓︎
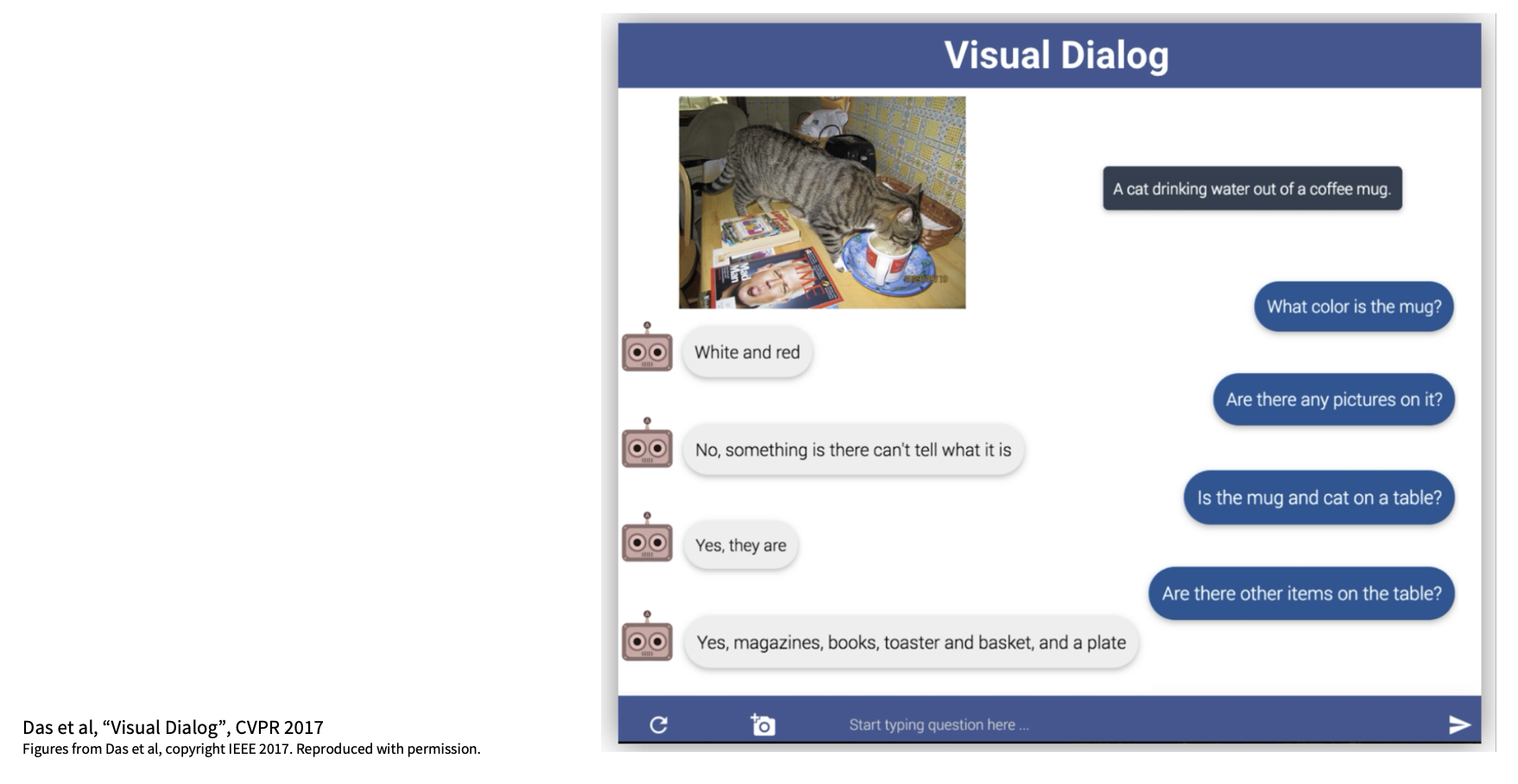
Visual Dialog⚓︎
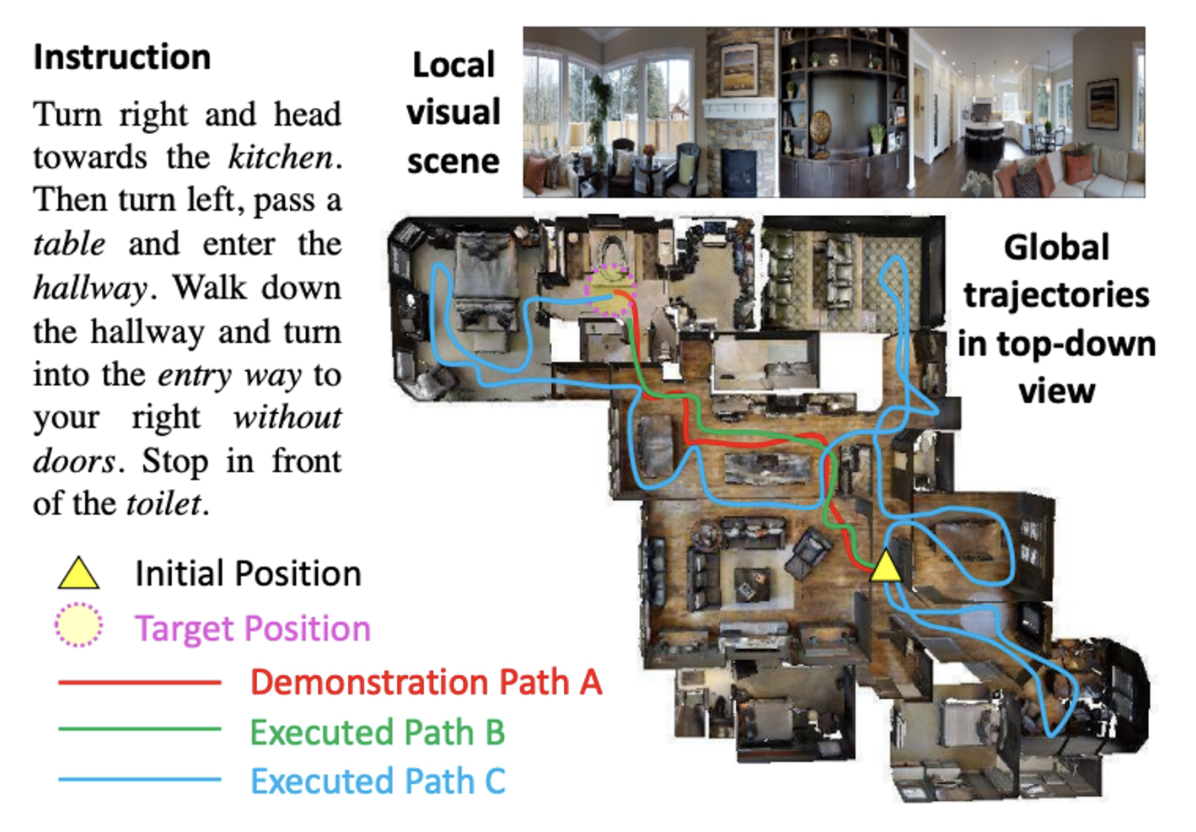
Visual Language Navigation⚓︎
- 智能体将指令编码为语言
- 当视觉输入在一次移动后改变时,用 RNN 生成一系列的移动
Long Short Term Memory (LSTM)⚓︎
-
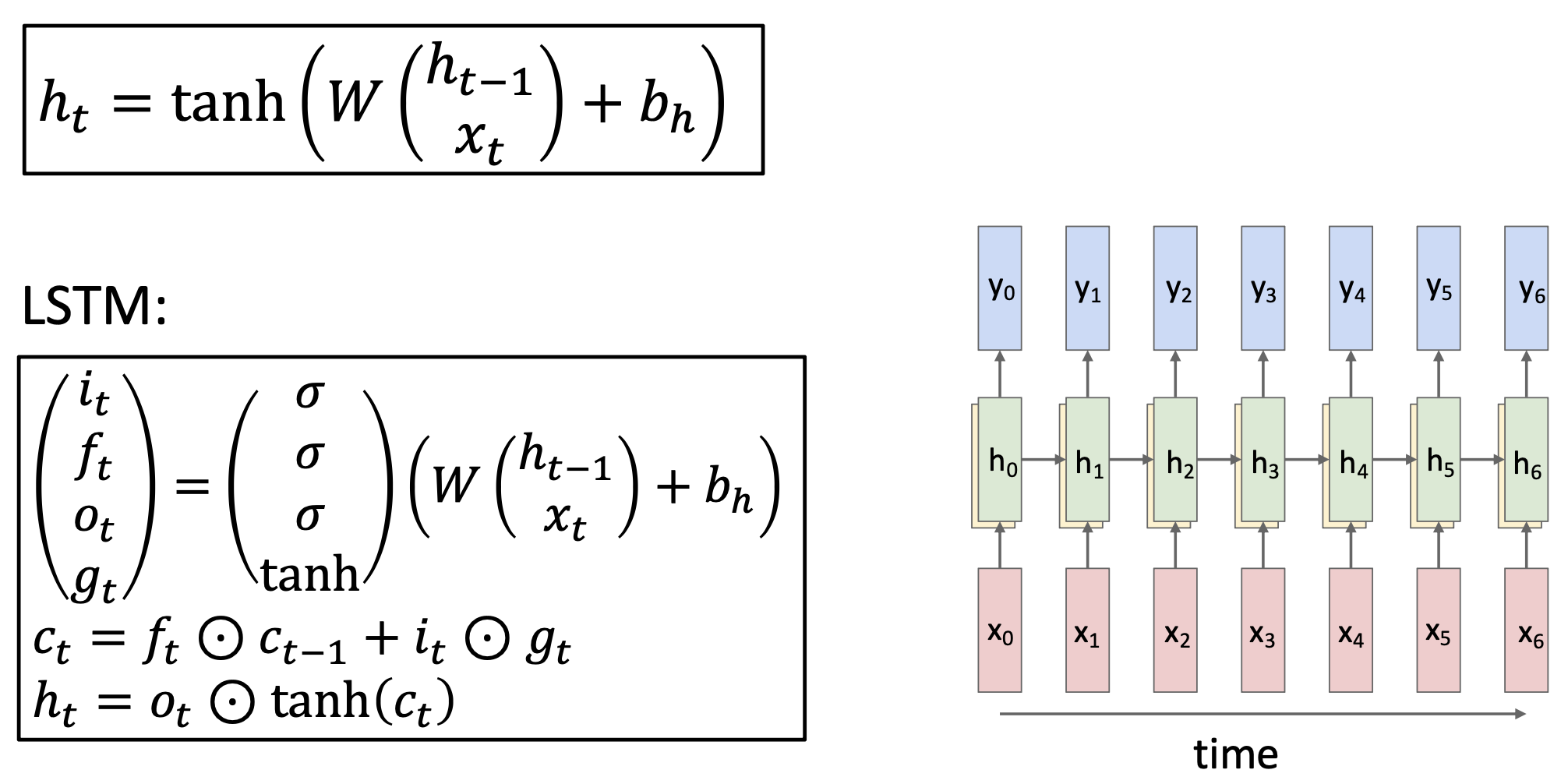
普通 RNN
\[ h_t = \tanh \left( W \begin{pmatrix} h_{t-1} \\ x_t \end{pmatrix} \right) \] -
LSTM
\[ \begin{aligned} \begin{pmatrix} i \\ f \\ o \\ g \end{pmatrix} & = \begin{pmatrix} \sigma \\ \sigma \\ \sigma \\ \tanh \end{pmatrix} W \begin{pmatrix} h_{t-1} \\ x_t \end{pmatrix} \\ c_t & = f \odot c_{t-1} + i \odot g \\ h_t & = o \odot \tanh(c_t) \end{aligned} \]
普通 RNN 的问题
普通 RNN 的梯度流:
从 \(h_t\) 到 \(h_{t-1}\) 的反向传播乘以 \(W\)(实际上是 \(W_{hh}^T\)
在多个时间步上的梯度:
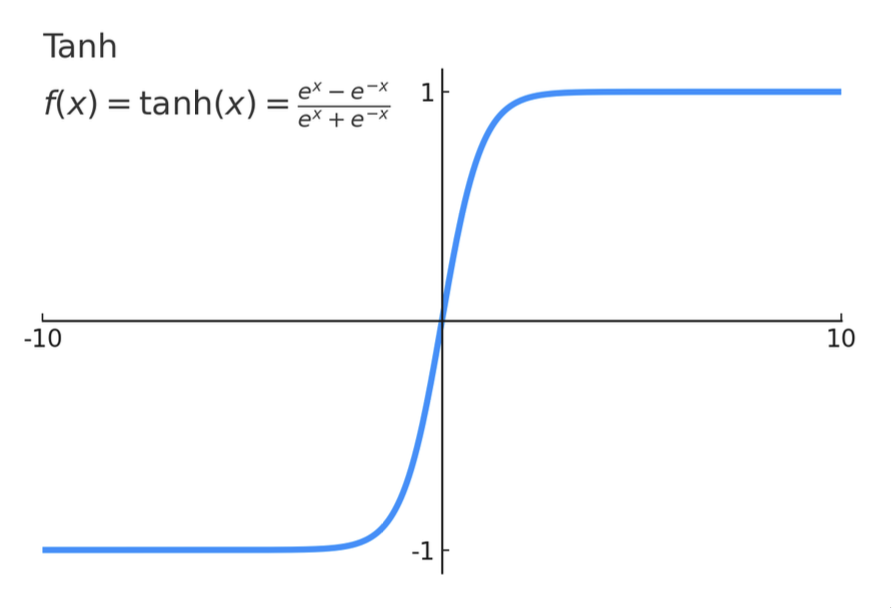
但是根据 \(\tanh'\) 的图像,其值几乎总是 < 1(只有在接近 0 的时候取值较大
若假设没有非线性,考虑 \(W_{hh}^{T-1}\) 的最大奇异值:
-
- 解决方案——梯度裁剪(gradient clipping):若范数过大,则缩放梯度
> 1 -> 梯度爆炸
-
< 1 -> 梯度消失
- 解决方案:改变 RNN 架构
长短期记忆(long short term memory, LSTM) 的方程如下:
其中:
-
\(\begin{pmatrix} i \\ f \\ o \\ g \end{pmatrix}\) 表示四个门
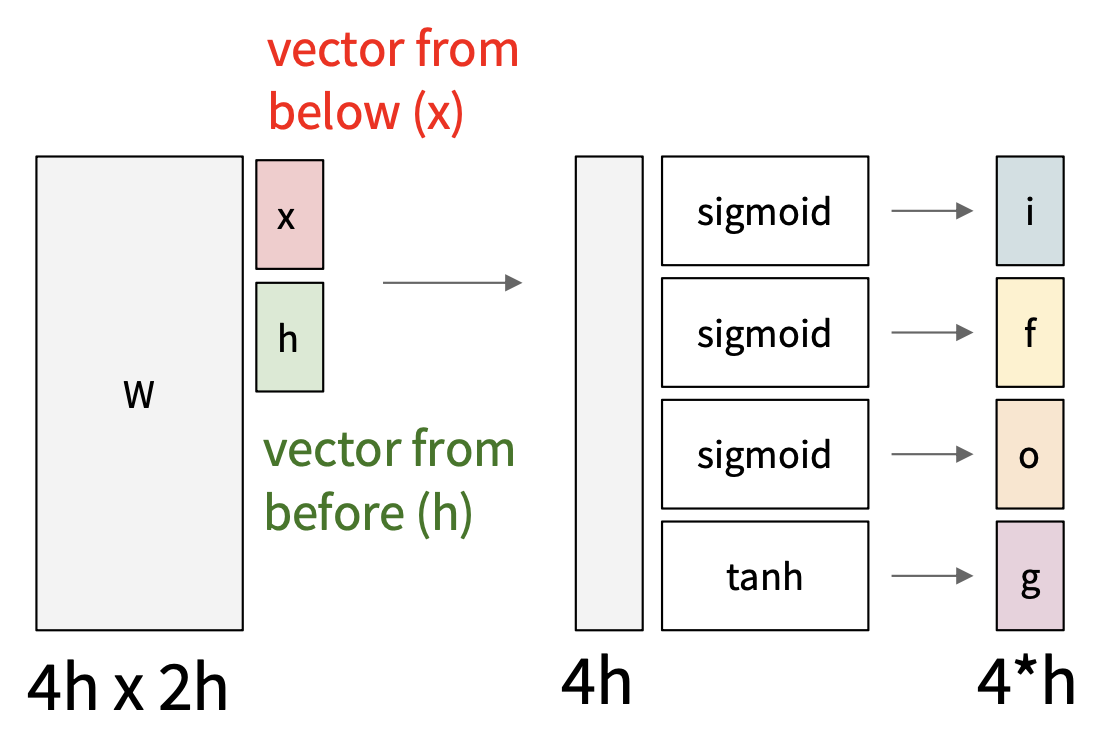
- \(i\):输入门 (input gate),是否向细胞写入
- \(f\):遗忘门 (forget gate),是否删除细胞
- \(o\):输出门 (output gate),要揭露多少细胞
- \(g\):门门 (Gate gate),向细胞写入多少东西
-
\(c_t\) 表示细胞状态
- \(h_t\) 表示隐含状态
LSTM 的内部结构如下:
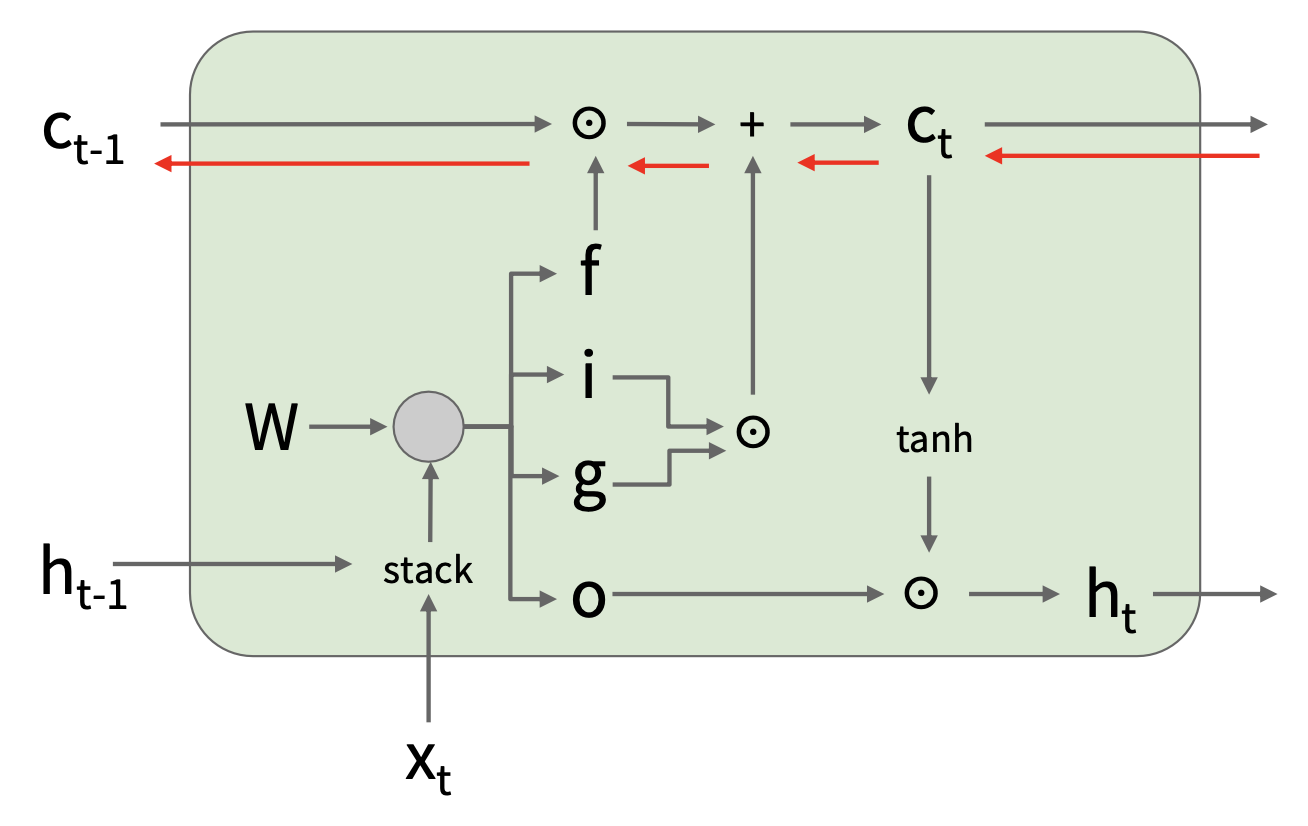
从 \(c_t\) 到 \(c_{t-1}\) 的反向传播仅做和 \(f\) 的逐元素乘法,而不是和 \(W\) 的矩阵乘法。
梯度流不可中断!
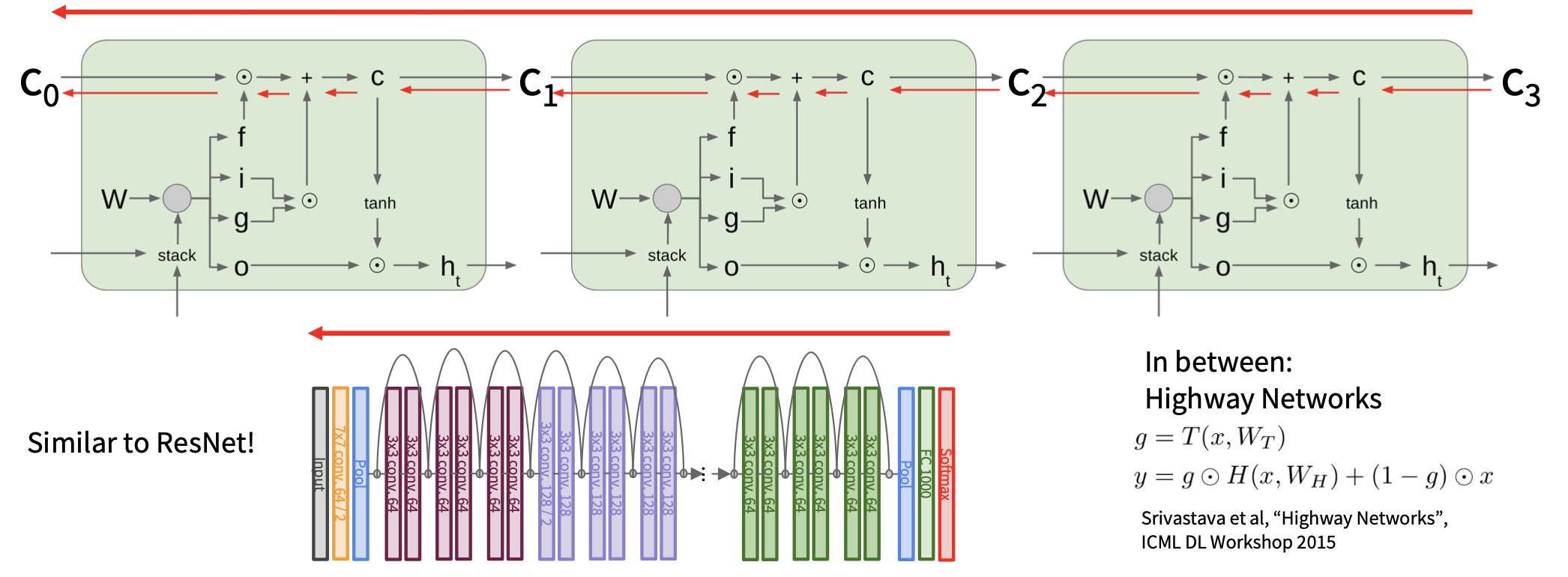
LSTMs 是否解决了消失梯度的问题呢?
LSTM 架构使得 RNN 更容易在多个时间步长中保留信息。
- 例如,如果 \(f = 1\) 且 \(i = 0\),则该单元的信息将被无限期保留
- 相比之下,普通 RNN 更难学习一个保持隐含状态信息的递归权重矩阵 \(W_h\)
LSTM 并不能保证没有消失 / 爆炸梯度,但它确实为模型学习长距离依赖提供了更简单的方法。
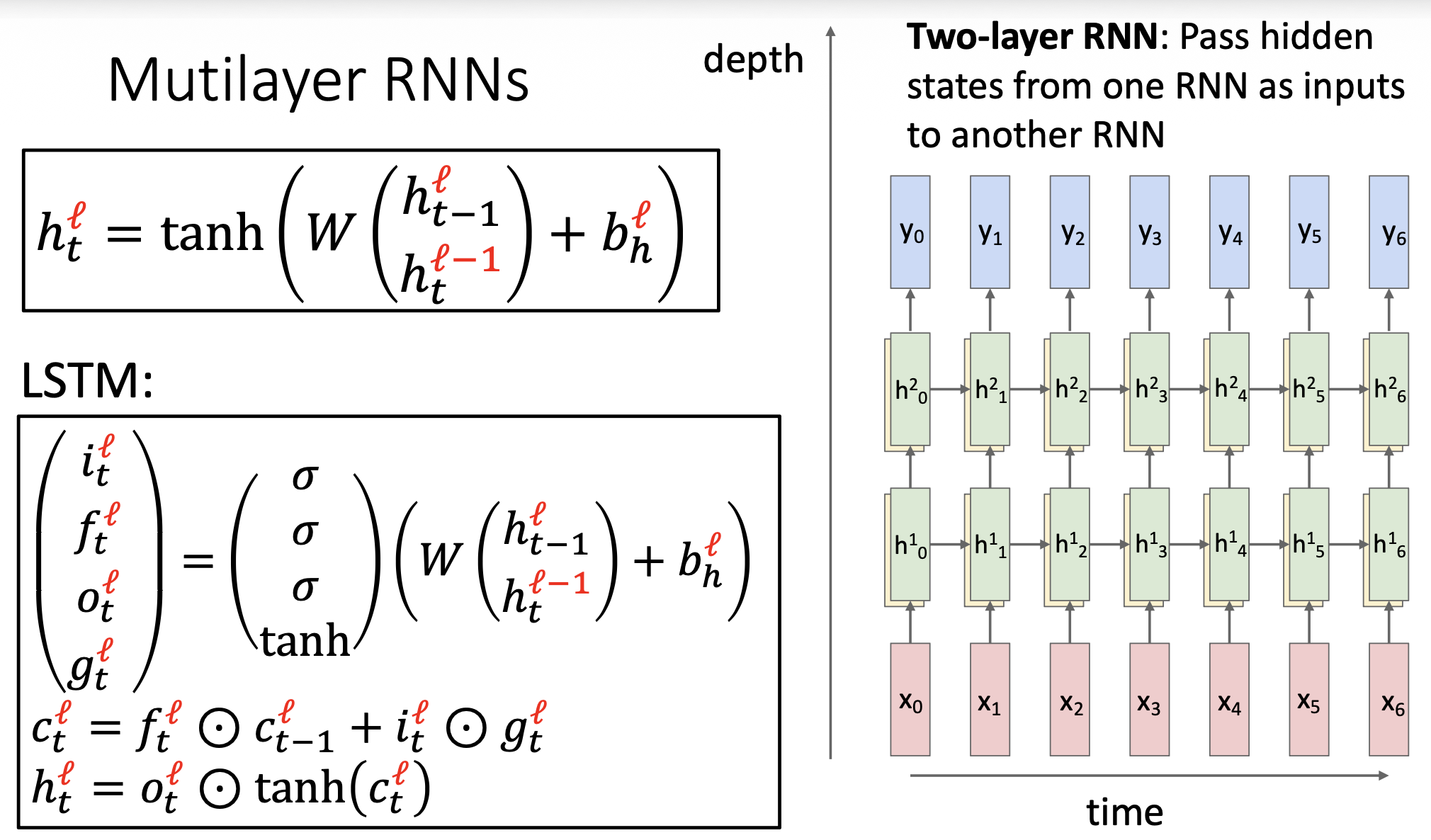
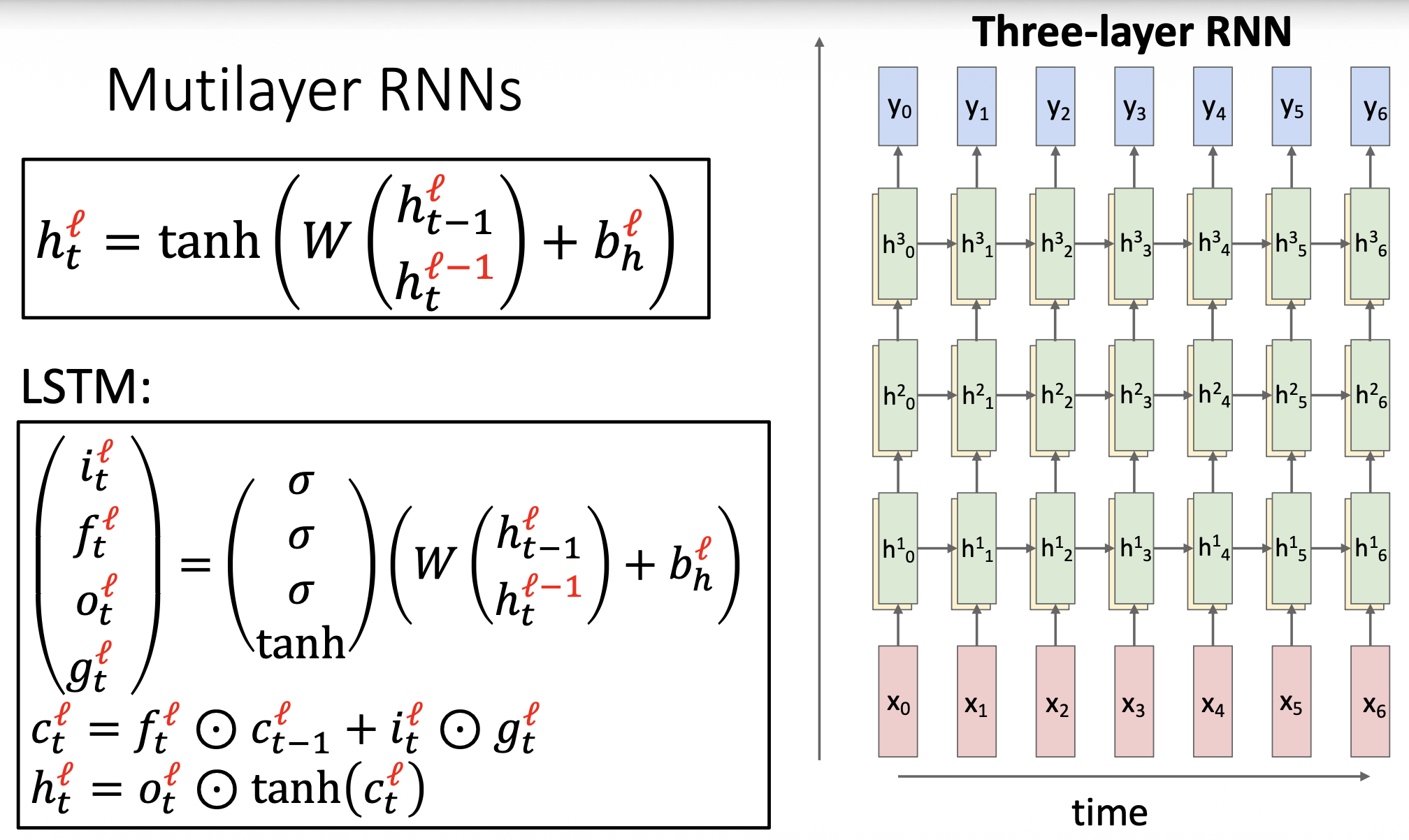
Multilayer RNNs⚓︎
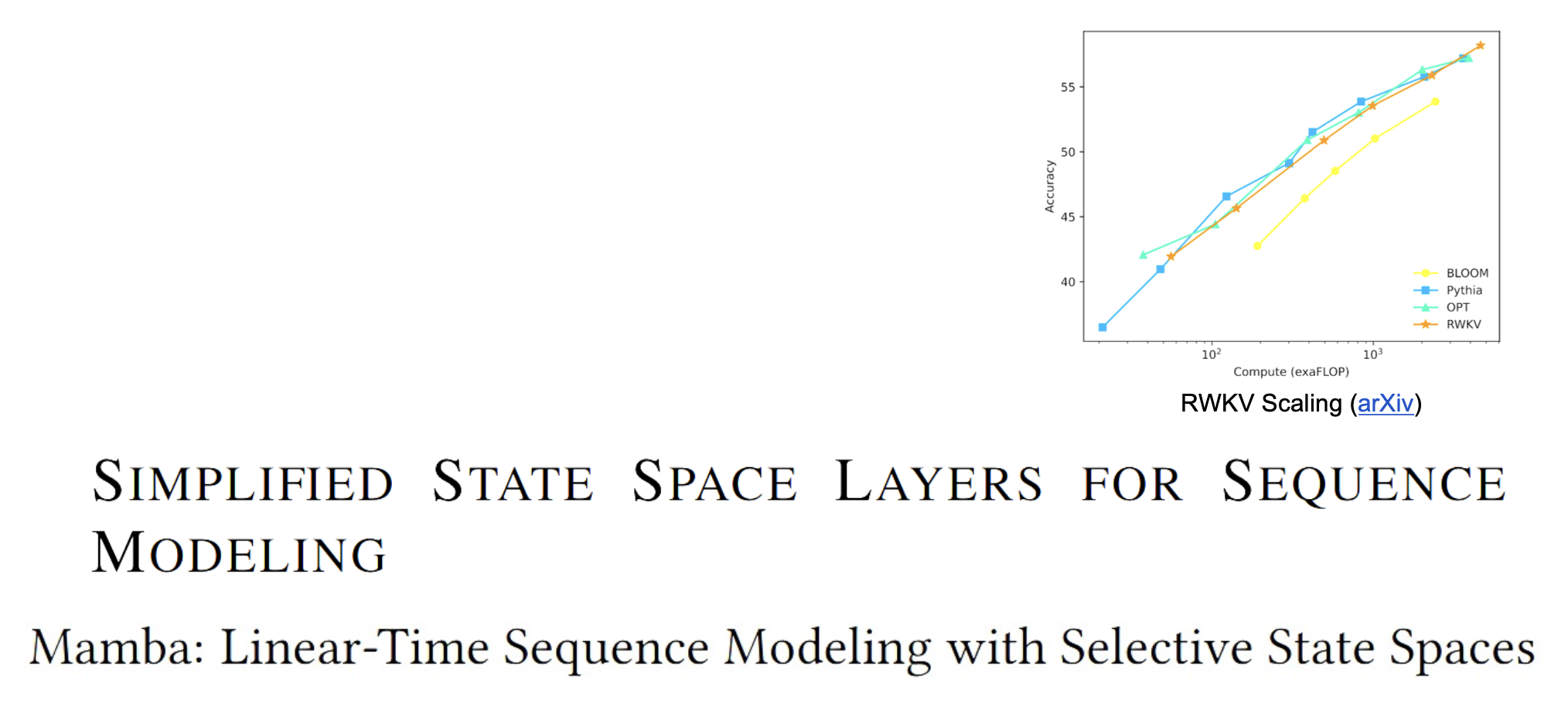
现代 RNNs
- 有时称为「状态空间模型 (state space models)」
- 隐含状态
- 主要优势:
- 无限的上下文长度
- 计算与序列长度成线性关系
总结
- RNN 使得架构设计有很大的灵活性
- 普通 RNN 简单但效果不佳
- 更复杂的变体(例如 LSTM、Mamba)可以引入选择性地传递信息的方法
- RNN 中的梯度反向传播可能会爆炸或消失
- 通过梯度裁剪来控制爆炸
- 通常需要时间反向传播
- 更好 / 更简单的架构是当前研究的热门话题,以及对序列进行推理的新范式
评论区