Rasterization⚓︎
约 4529 个字 14 行代码 预计阅读时间 23 分钟
Viewport Transformation⚓︎
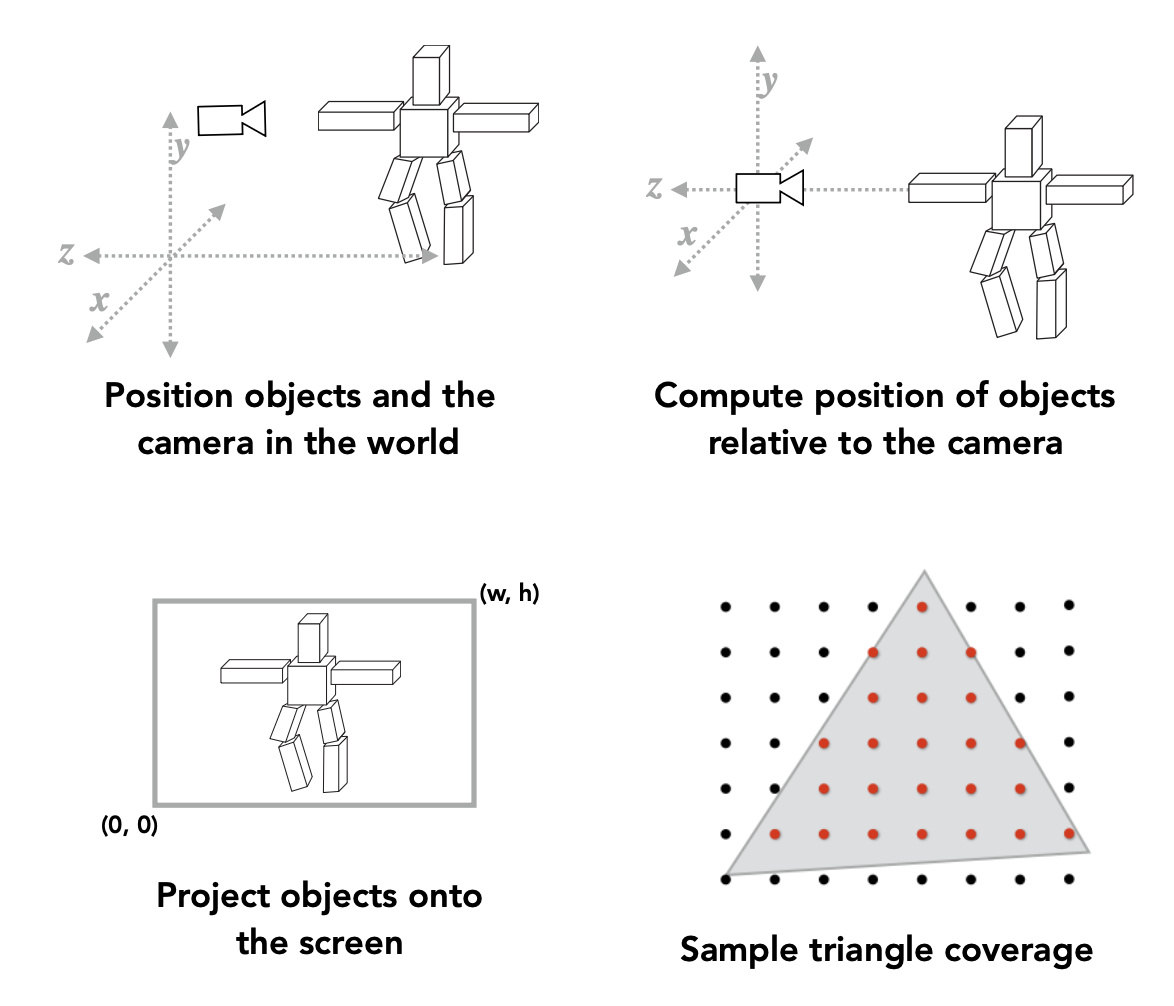
"MVP" 分别指代了上一讲的三个变换:
- 模型变换 (Model transformation)(放置物体)
- 视图变换 (View transformation)(放置相机)
- 投影变换 (Projection transformatino)
- 正射投影(长方体 -> \([-1, 1]^3\) 的正则立方体)
- 透视投影(视锥 -> 正则立方体)
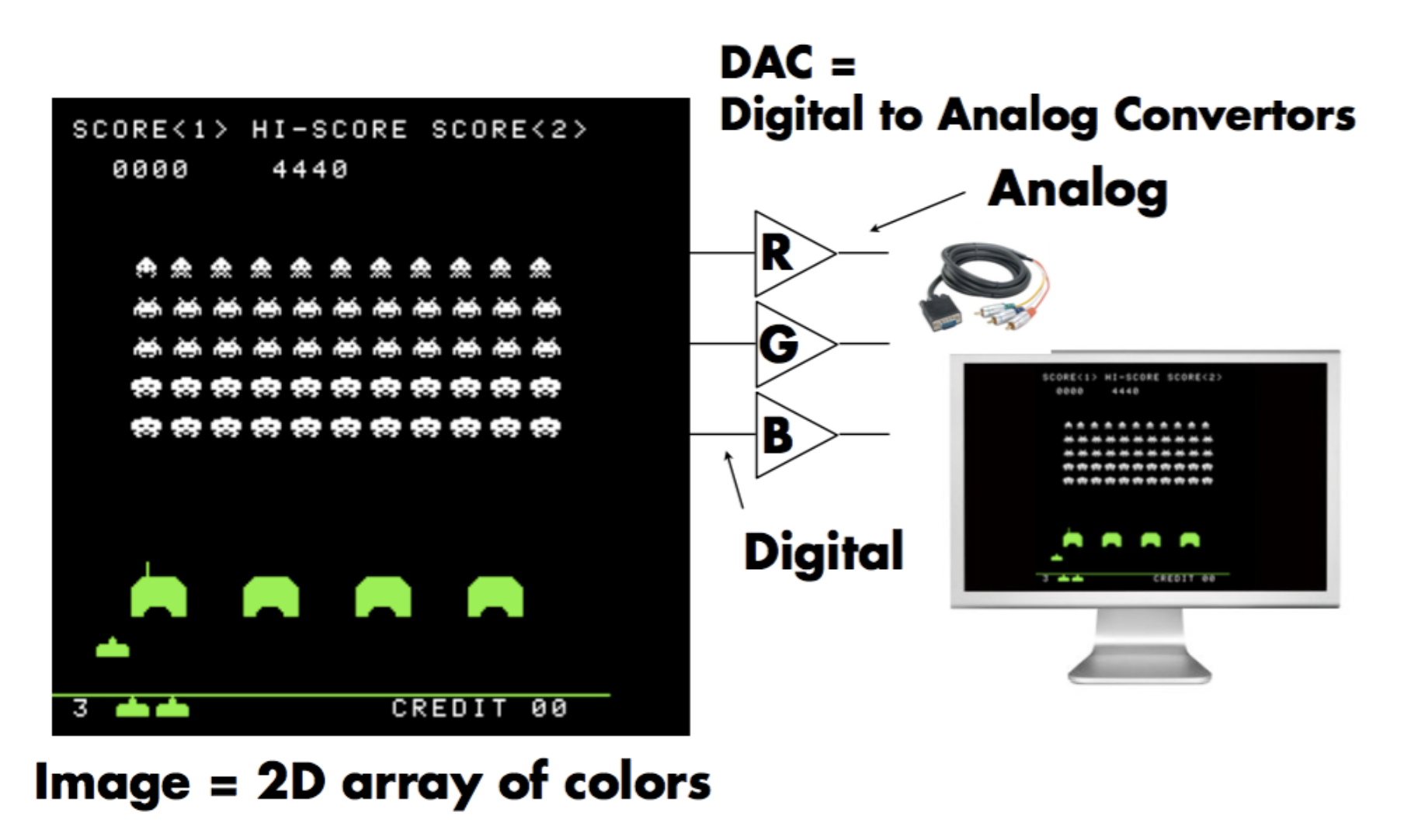
所以通过上一讲的各种变换,我们最终得到了一个正则立方体。那我们要这个正则立方体干什么呢?将它画在一块屏幕(screen) 上。屏幕的定义是:
- 一个像素(pixels) 数组
- pixel 一词是由 picture(图像)和 element(元素)两个单词构成的
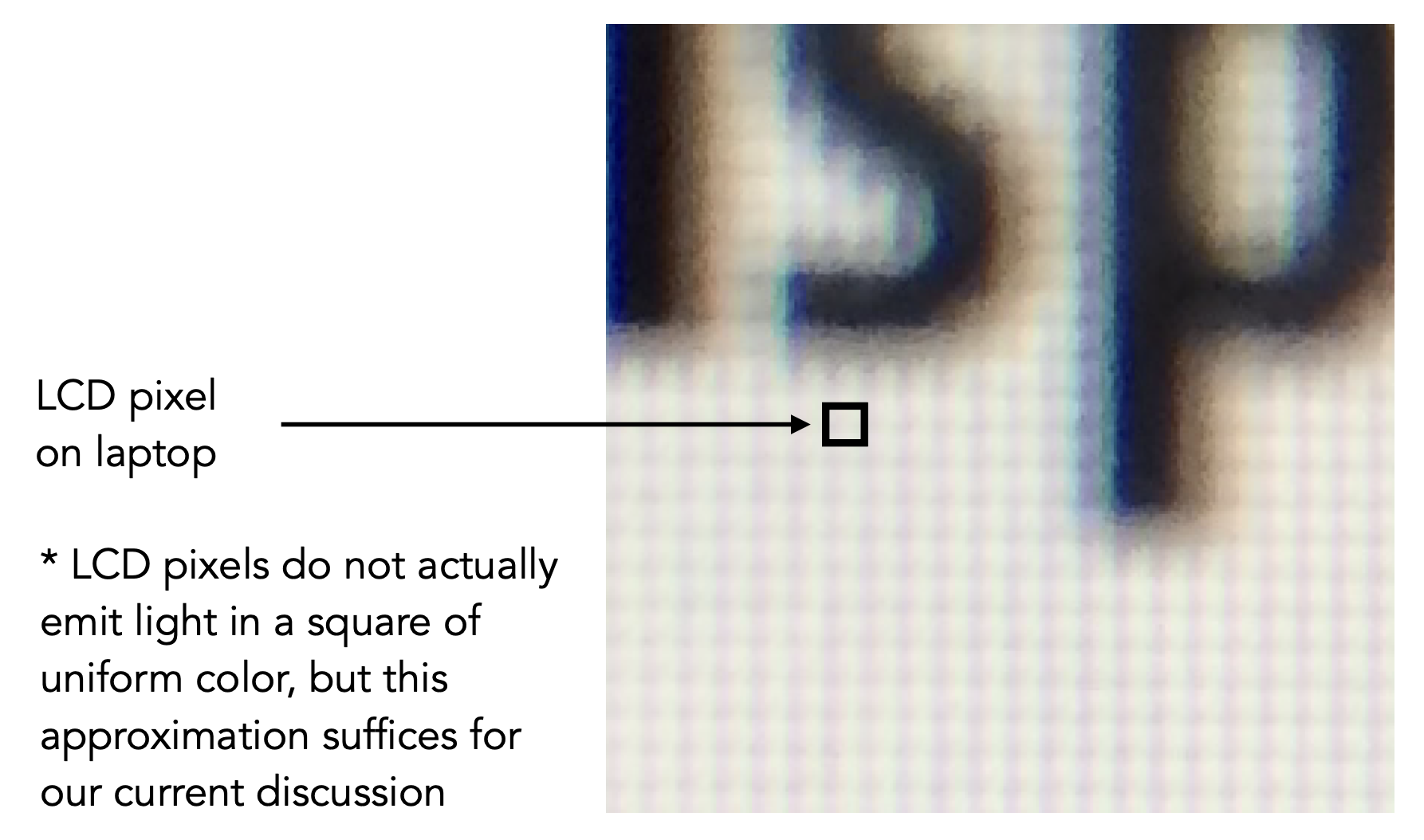
- 目前假定一个像素就是一个颜色一致的小方形
- 像素的颜色是由(红色,绿色,蓝色)混合而成的
- 数组的大小就是分辨率(resolution)
- 一种典型的光栅显示器 (raster display)
- raster 一词在德语就是 screen 的意思
- 而它的动词形式 rasterize(光栅化)的意思就是“画在屏幕上”
由“屏幕”延伸出来的一个概念是屏幕空间(screen space)
注:以下定义和虎书上的有略微的不同。
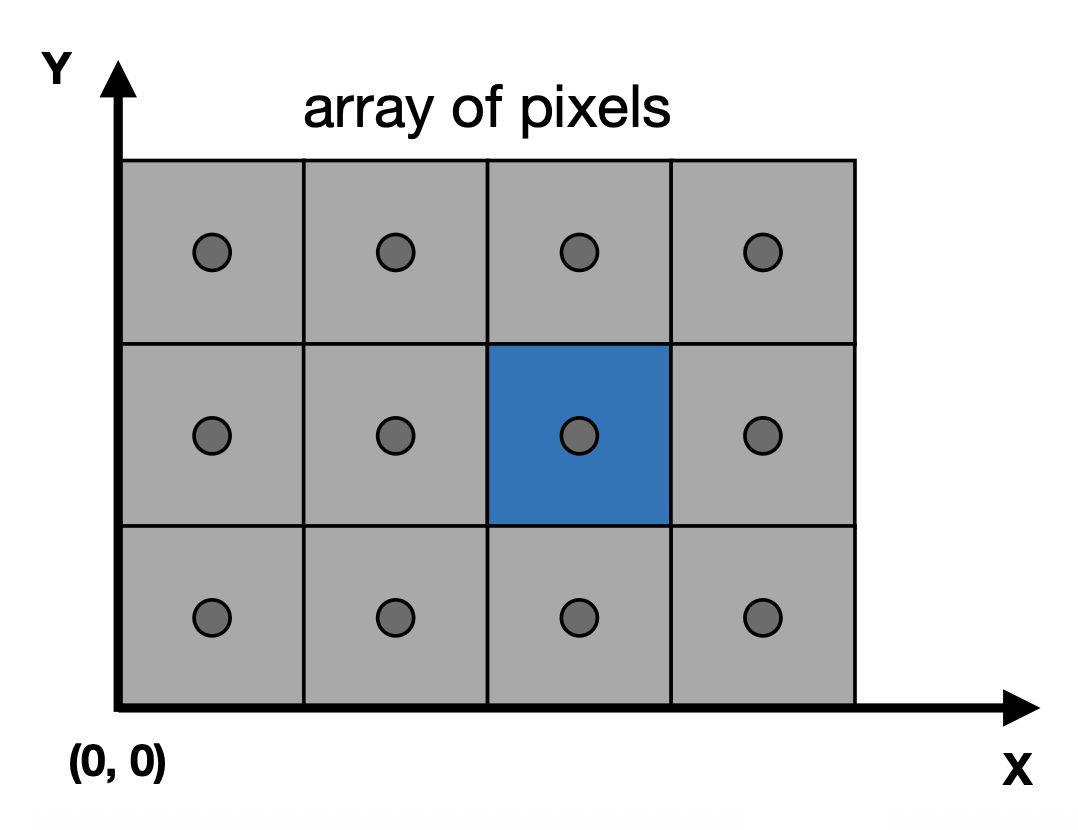
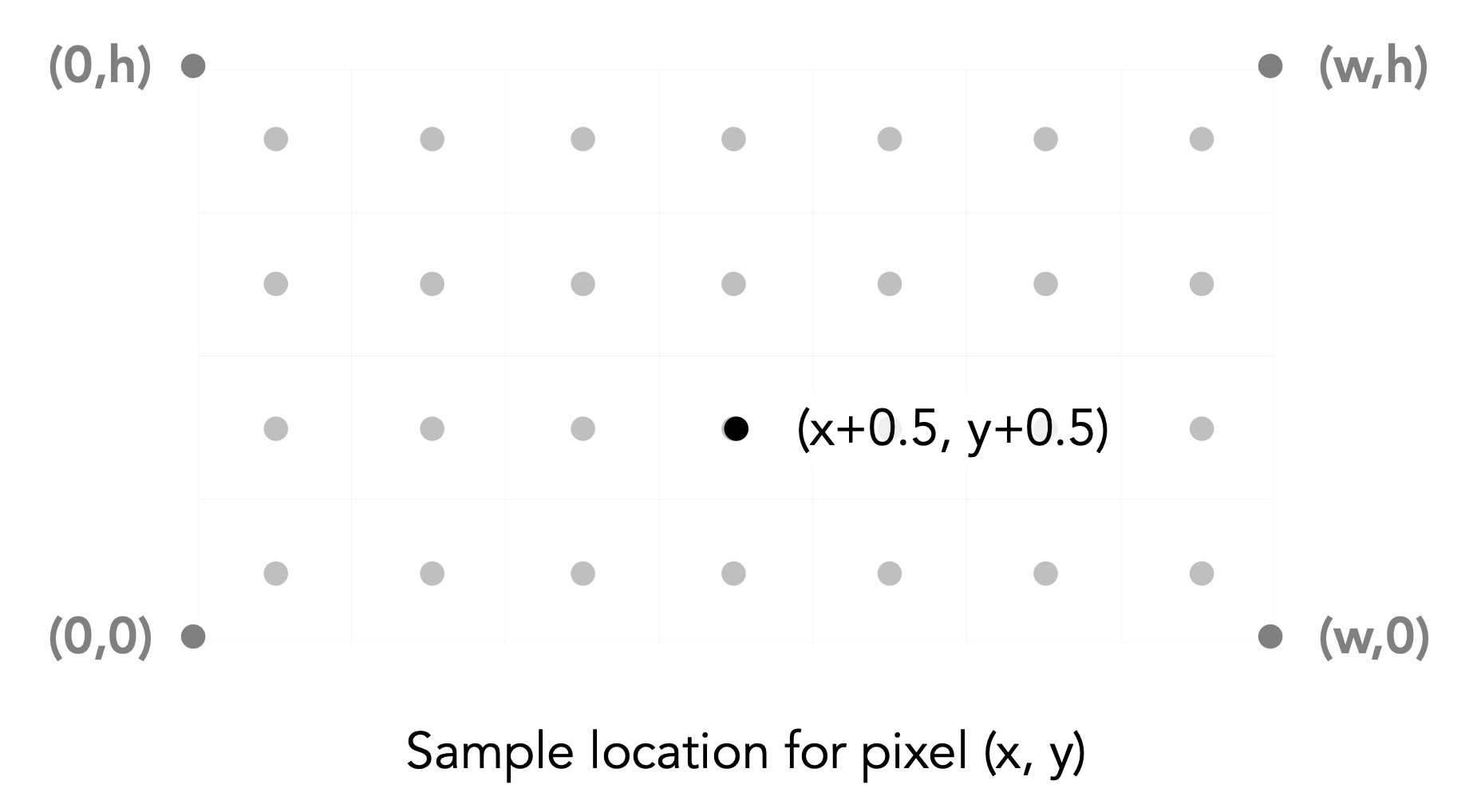
- 像素的索引形式为 (x, y),其中 x, y 均为整数
- 像素的索引范围为 (0, 0) 到 (width - 1, height - 1)
- 像素 (x, y) 的中心为 (x + 0.5, y + 0.5)
- 屏幕的覆盖范围为 (0, 0) 到 (width, height)
正则立方体被画在屏幕上的时候,
- 不考虑 z
-
仅在 xy 平面上变换:\([-1, 1]^2 \rightarrow [0, \text{width}] \times [0, \text{height}]\)
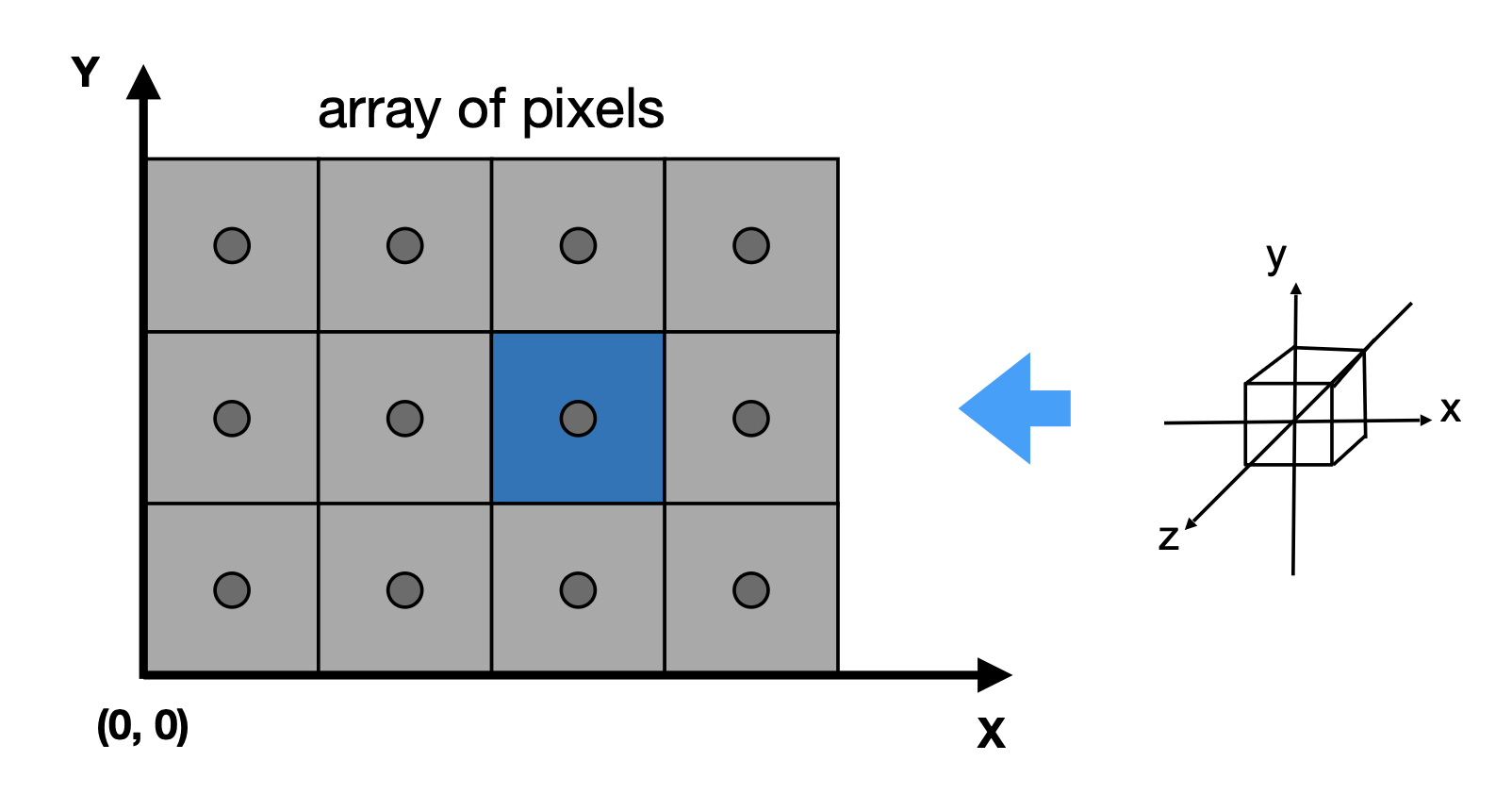
-
视口 (viewport) 变换矩阵:
\[ M_{viewport} = \begin{pmatrix}\frac{\text{width}}{2} & 0 & 0 & \frac{\text{width}}{2} \\ 0 & \frac{\text{height}}{2} & 0 & \frac{\text{height}}{2} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1\end{pmatrix} \]
Different Raster Displays⚓︎
-
示波器 (oscilloscope)

-
阴极射线管(cathode ray tube, CRT)——示波器背后的装置
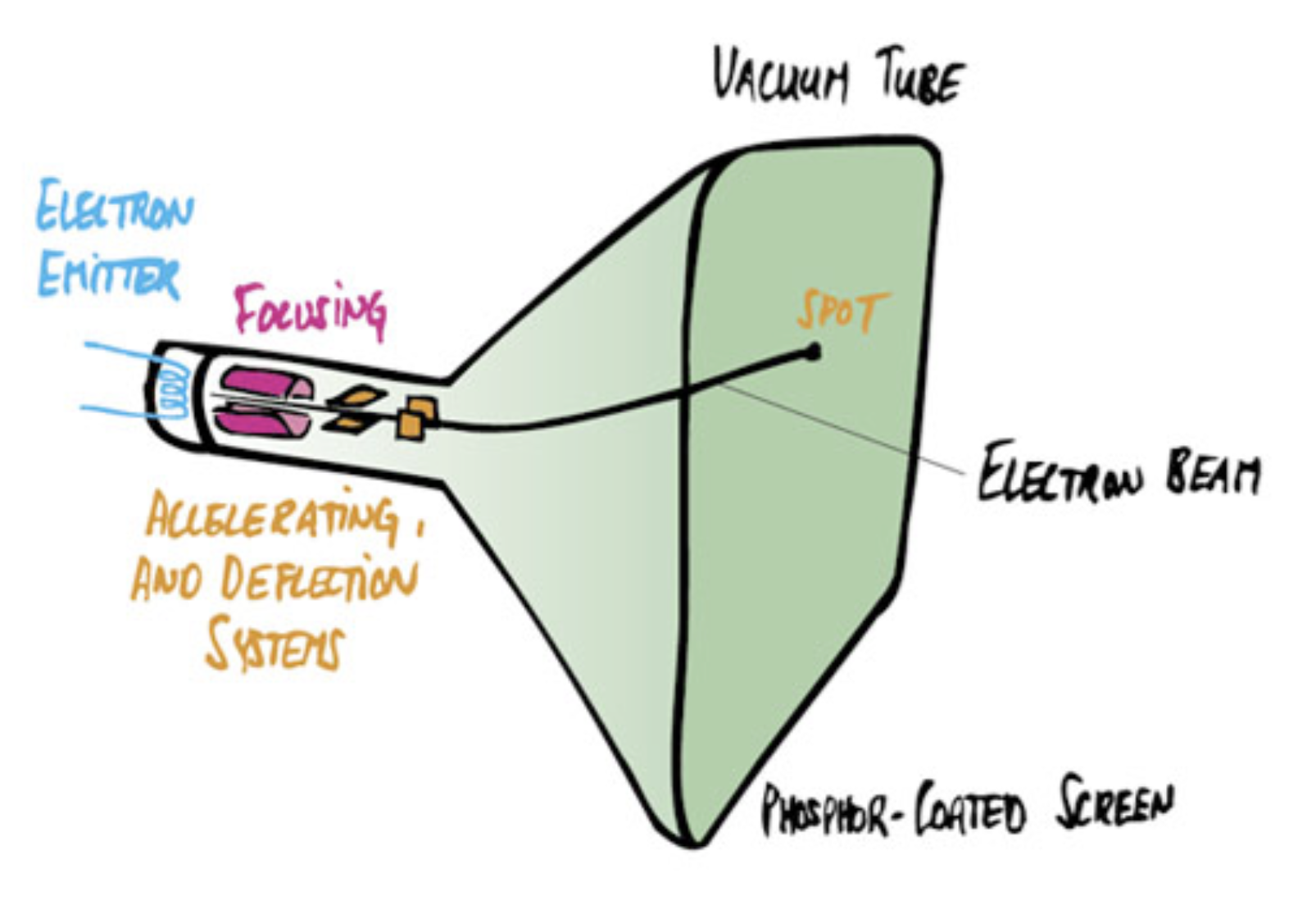
-
早期的电视和显示器就是基于光栅显示 CRT
-
显示器上的内容通过 CRT 一行行扫描显示出来
-
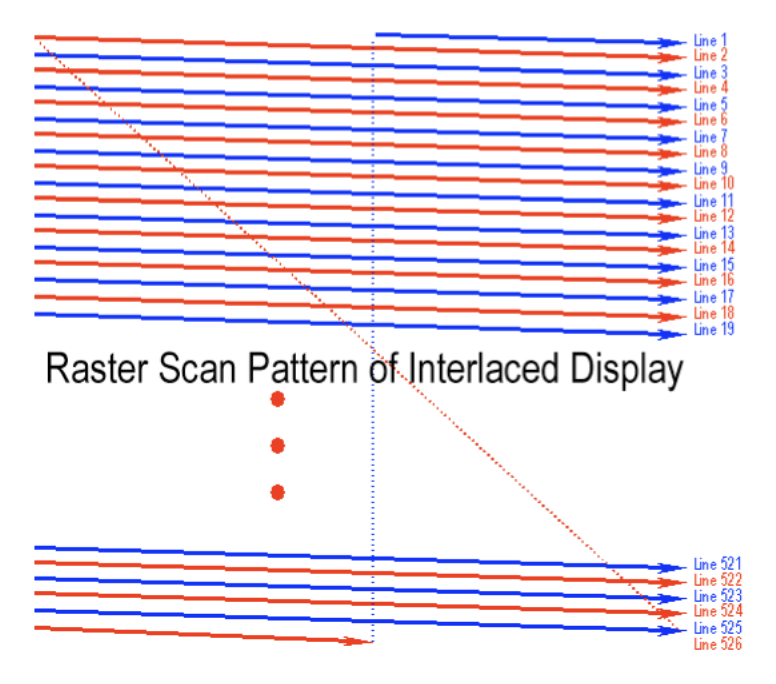
隔行扫描:先扫完奇数行,后扫偶数行,工作量减少一半,人眼的视觉停留导致不易察觉
- 现在的视频压缩上仍然沿用这一思想
- 问题:严重的画面撕裂,特别是对高速运动的画面,会出现“鬼影”
-
-
帧缓冲区 (frame buffer):光栅显示器的内存(在现代计算机中就是显存)
- 显示器显示的图像就是内存中保存的内容
-
平板显示器 (flat panel display)
-
低分辨率液晶显示器 (low-res LCD display)

-
彩色 LCD, OLED, ...

-
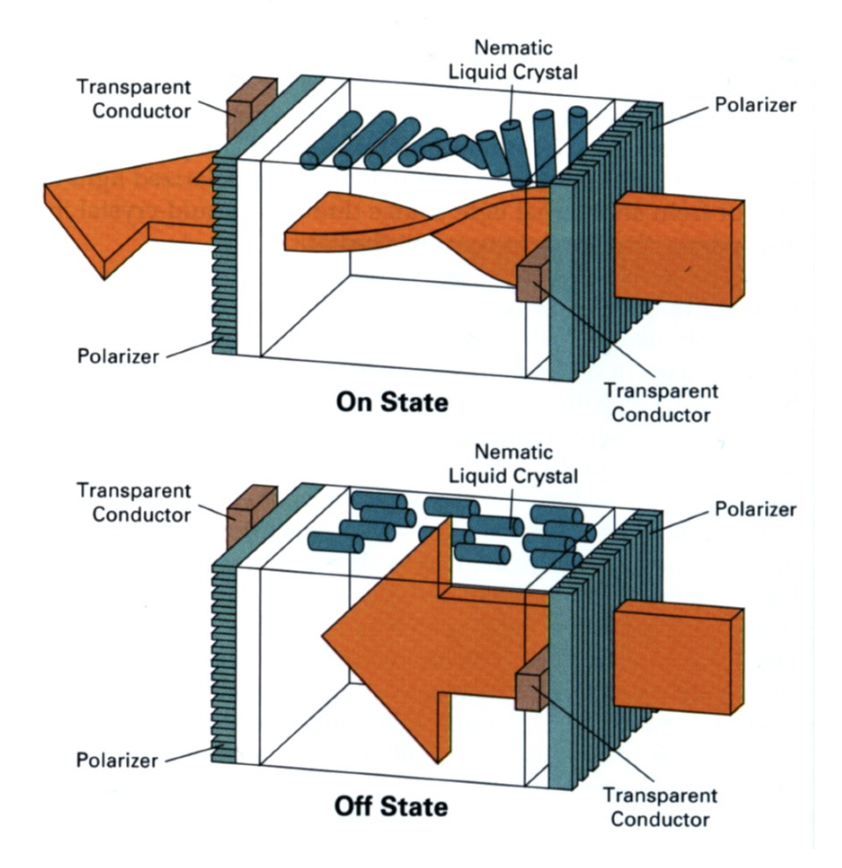
LCD(液晶显示器 (liquid crystal display))像素
- 原理:通过扭转偏振 (polarization) 来阻挡或传递光线
- 背光照明(例如荧光灯 (fluorescent) 或 LED)
- 通过部分扭转达到合适的亮度
-
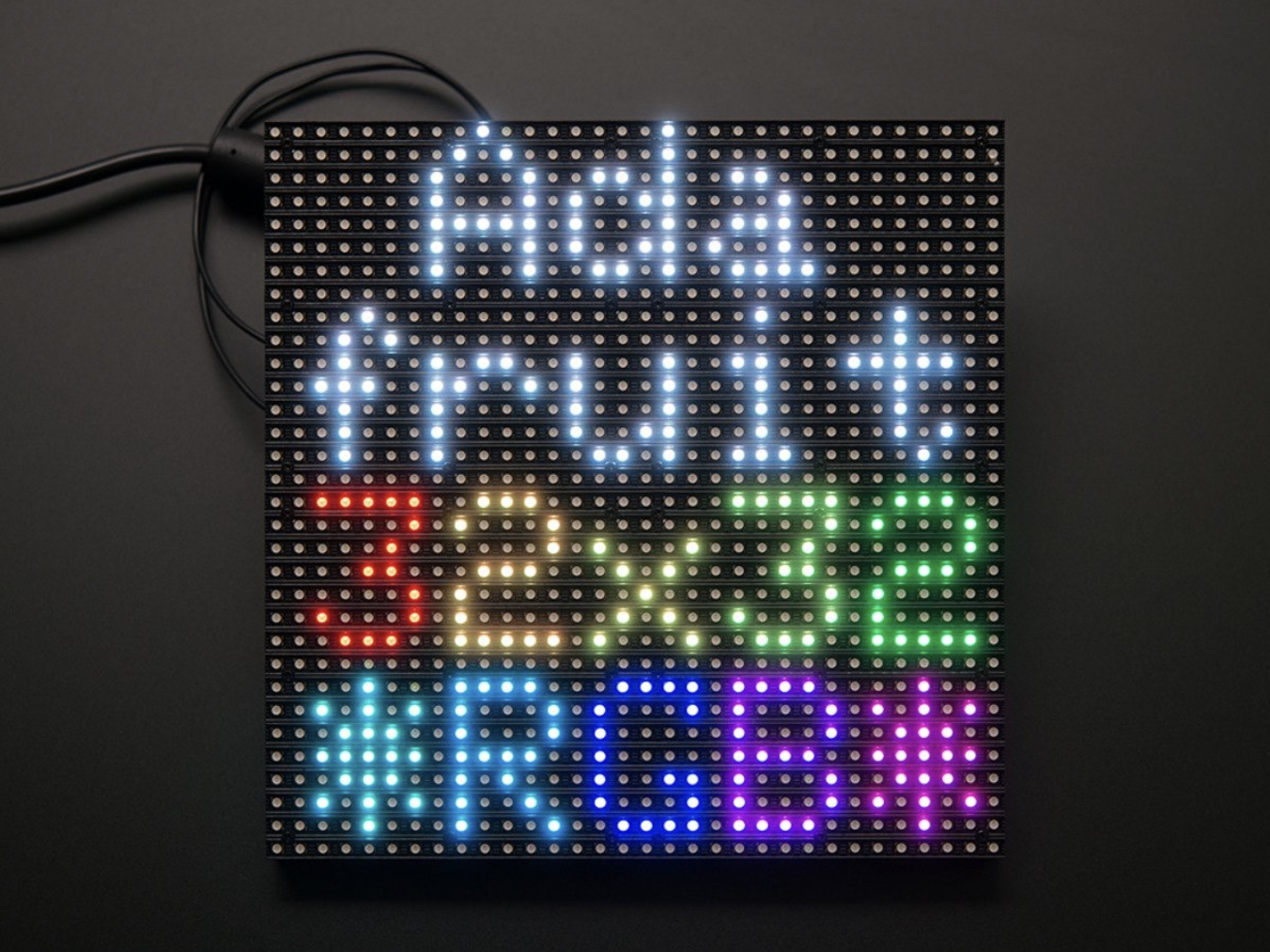
LED(发光二极管 (light emitting diode))阵列显示器
-
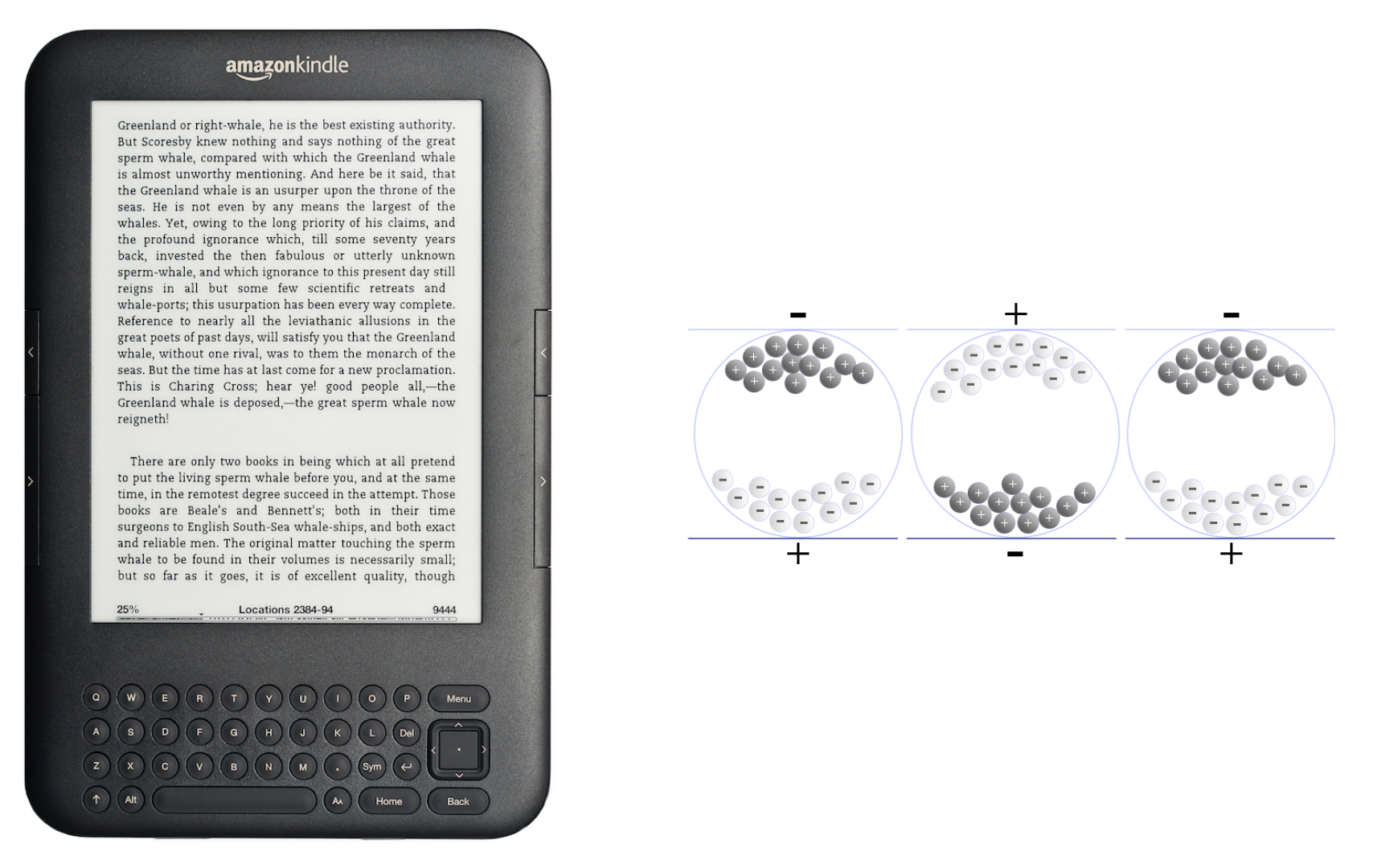
电泳 (electrophoretic)(电子墨水)显示屏
-
-
Rasterizing a Triangle⚓︎
光栅化(rasterization) 的意思就是将物体绘制在光栅显示器上,
-
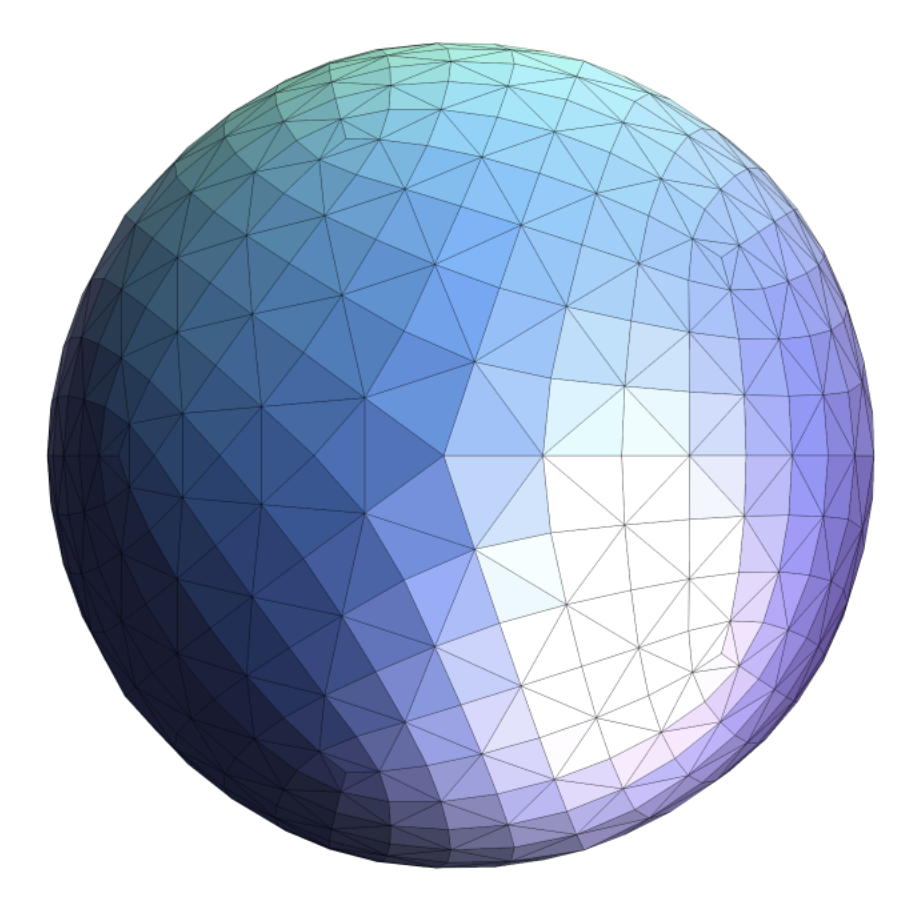
可以用多边形的网格 (polygon meshes)

图中的老虎并不是真的,而是通过 CG 技术绘制出来的。
-
也可以用三角形的网格 (triangle meshes)
通常我们将三角形作为基本的形状图元 (fundamental shape primitives),这是因为:
- 三角形是最基础的多边形,并且任何多边形都可以被拆分成多个三角形
- 一些独特的性质
- 保证是一个平面 (planar)
- 三角形的内外部定义清晰
- 在三角形顶点上的插值由明确定义的方法(重心插值(barycentric inrerpolation)
) ,也就是说只要知道三角形三个顶点的属性,就能知道三角形内任何一点的属性
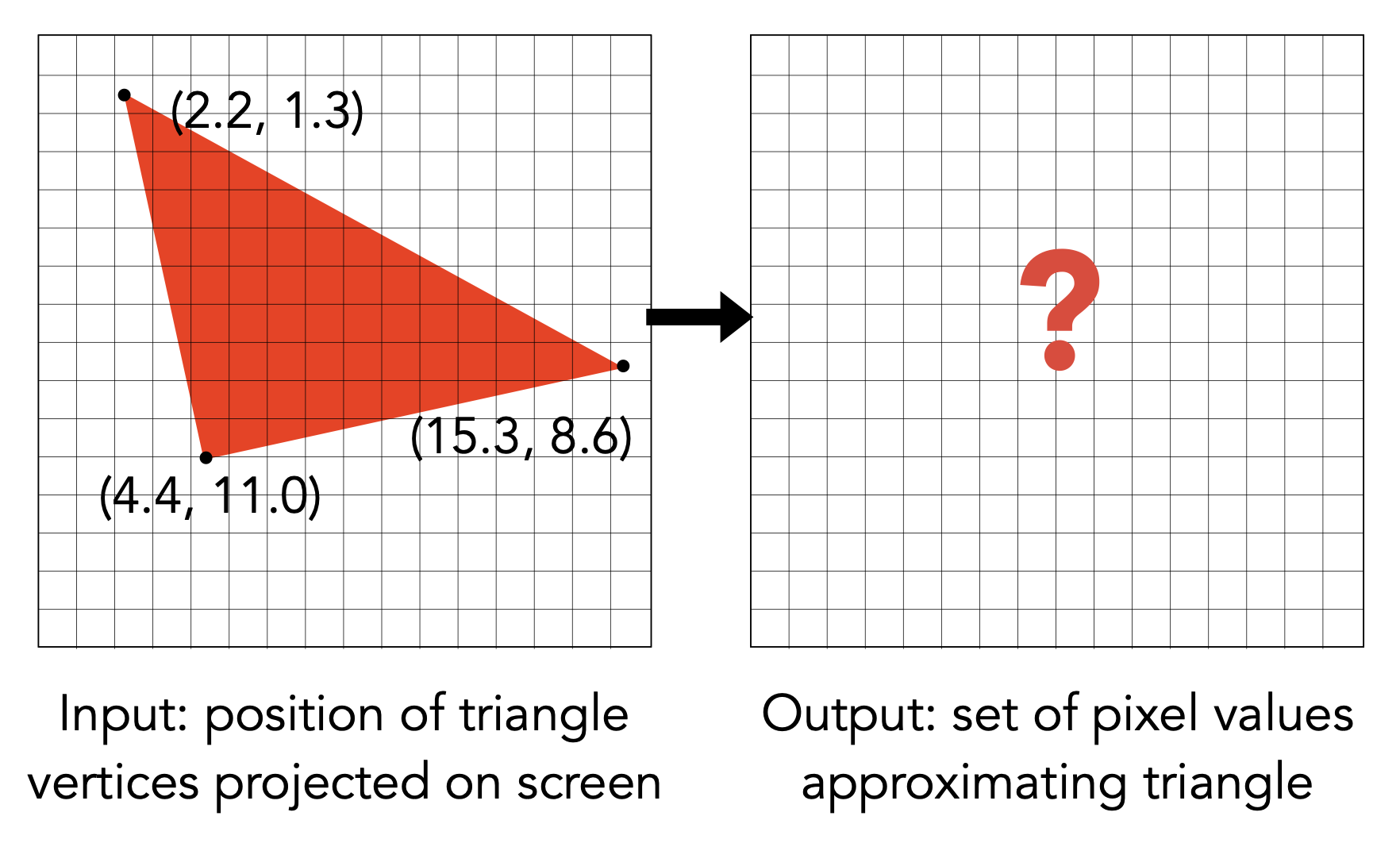
现在我们的目标是用像素来近似表示一个三角形。用更规范的语言表述为:找到一个函数,满足
- 输入:三角形顶点投影在屏幕上的位置
- 输出:一个用于近似表示三角形的像素集合
一种简单的光栅化方法是采样(sampling),即对于一个连续的函数上,在特定点上计算函数值,从而离散化(discretize) 一个函数。下面用 C++ 代码表示这一过程:
采样是图形学中的一个核心思想,我们可以采样时间(1D
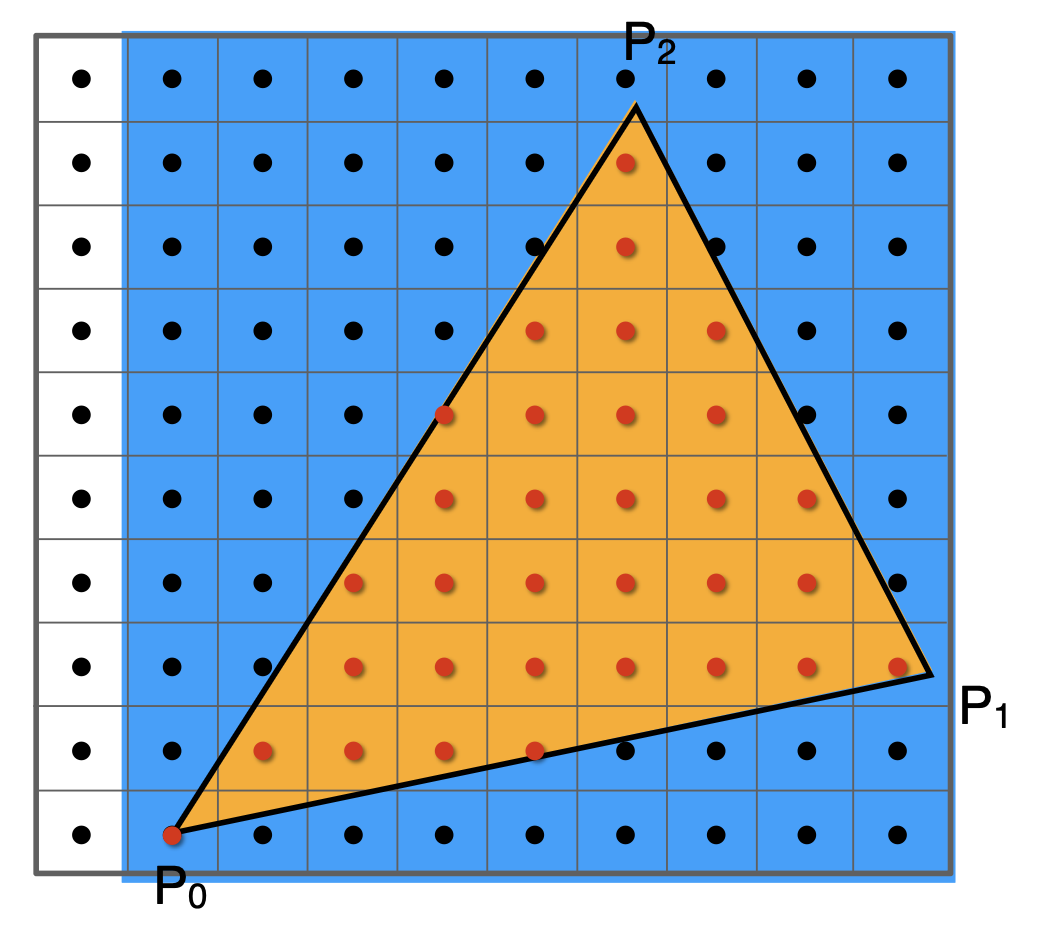
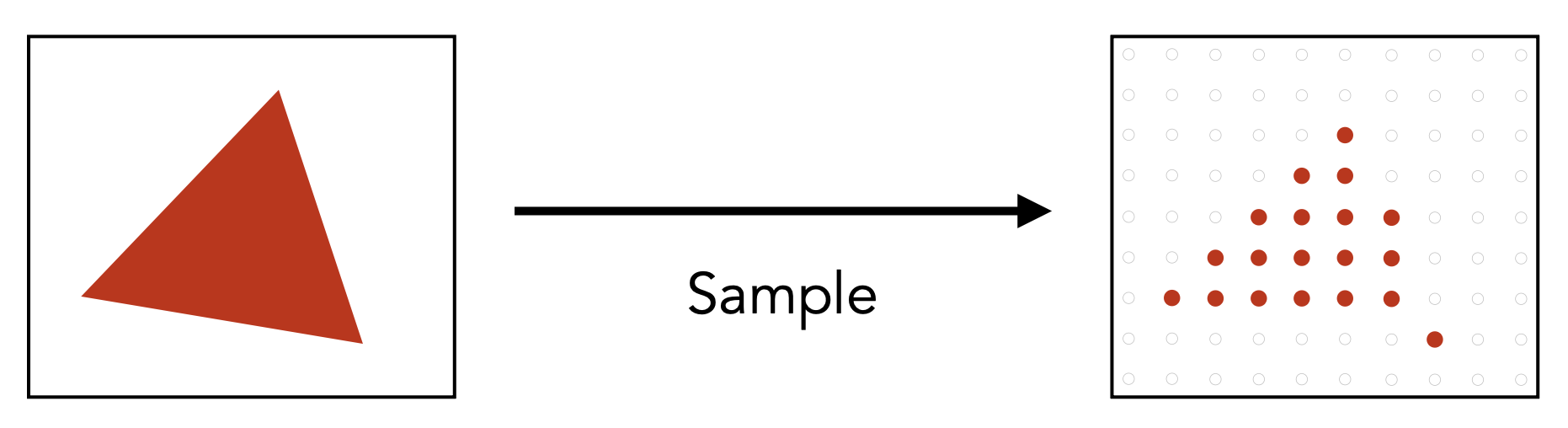
如果仅考虑像素中心在三角形范围内的像素,结果如下:
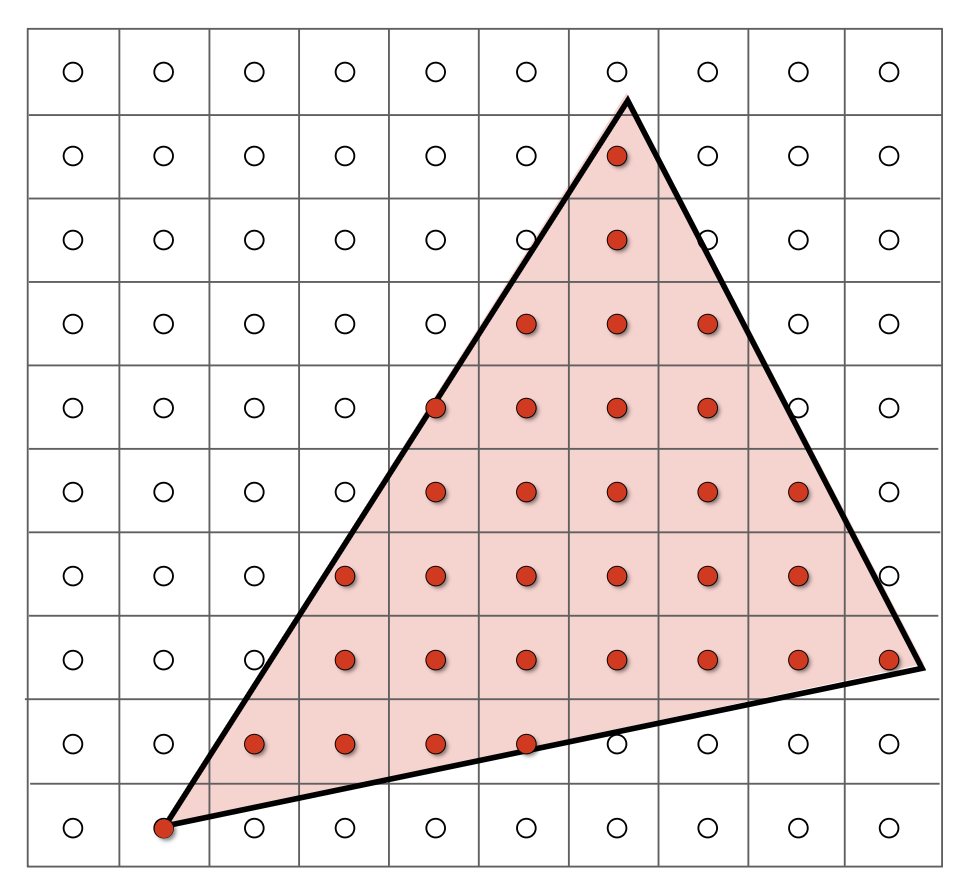
我们需要定义一个二元函数 inside(tri, x, y),来判断一个点 (x, y)(x, y不必是整数)是否在三角形内。如果是的话,函数返回 1,否则返回 0。所以光栅化的过程就相当于采样一个 2D 的指示器函数。
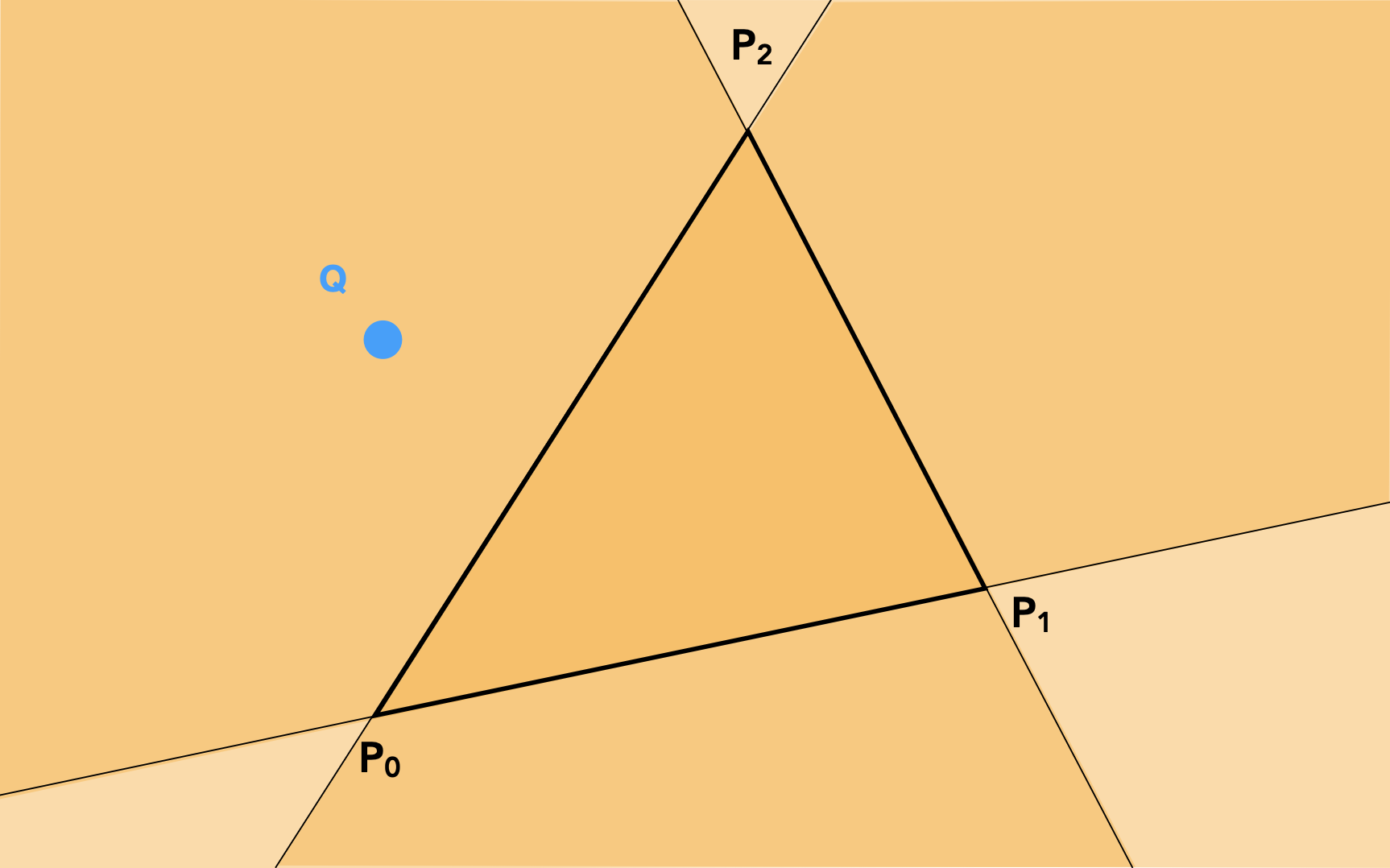
接下来的问题是:inside 函数如何实现?这时,前面介绍过的叉积就派上用场了!判断一个点是否在三角形内,只要看这个点是否在构成三角形的沿同一方向(比如逆时针)的三条向量的同一侧,如果是的话就说明这个点在三角形内;只要出现异侧的情况,就说明点在三角形外。
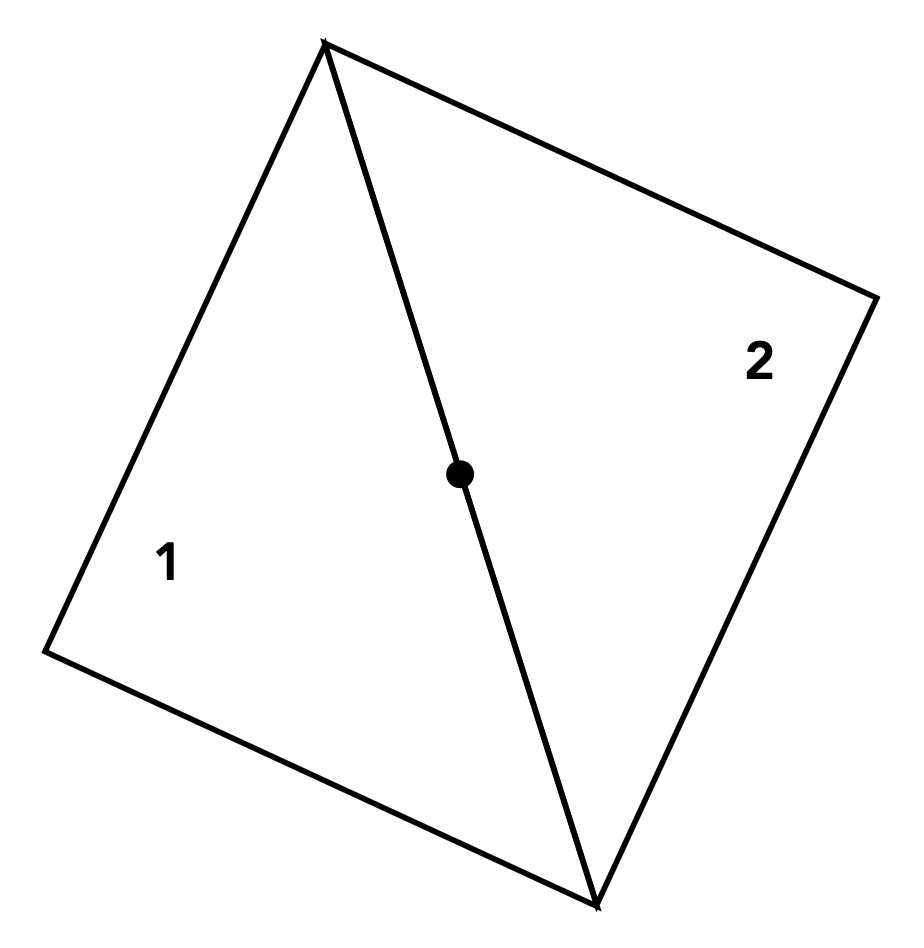
像下图所示的(字面意义上的)边界情况就比较复杂:这个点到底算三角形 1 的,还是算三角形 2 的?这个就由自己定义,只要合理就行。像 OpenGL,DirectX 等图形学 API 的定义会更加复杂,所以我们不会深究。
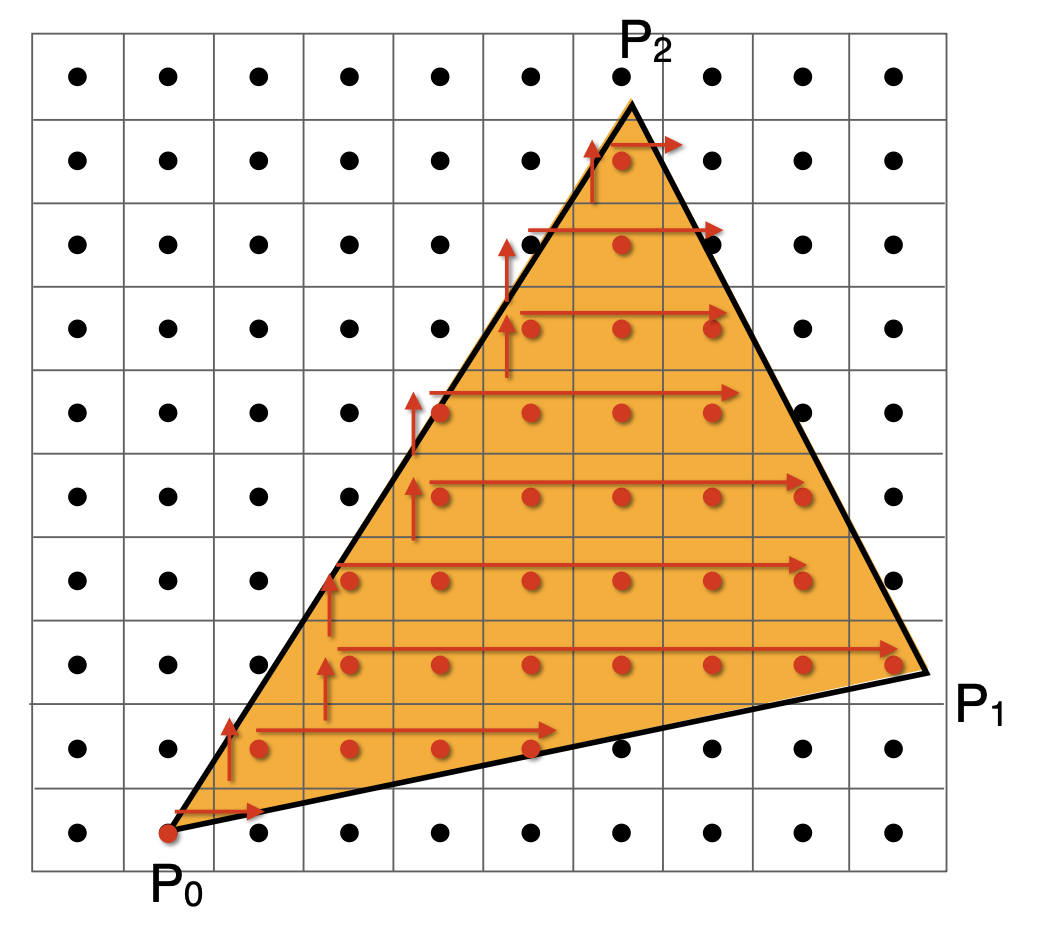
要想更快地检查三角形所在的所有屏幕像素,我们可以根据已知的三角形三顶点的坐标来确定一个包围盒(bounding box),即包围三角形的最小矩形。
还有一种更快的遍历方法叫做递增三角形遍历(incremental triangle traversal),它更适合那种旋转一定角度的瘦长的三角形(自行脑补一下
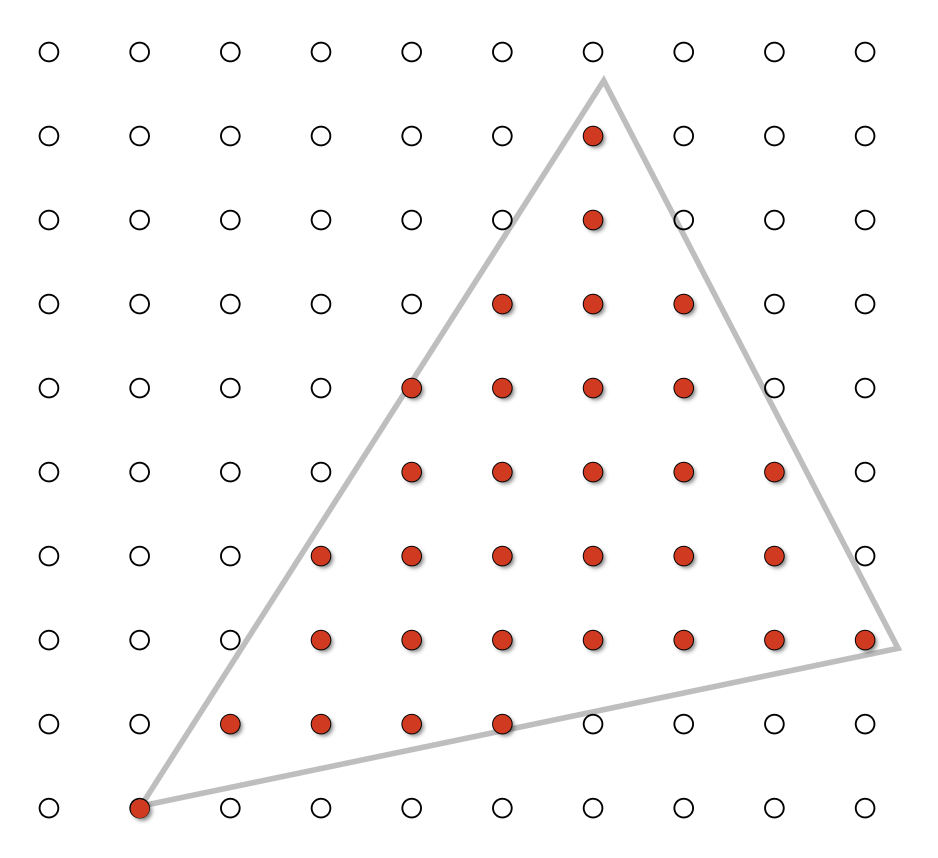
如果显示器直接显示采样出来的信号,结果如下:
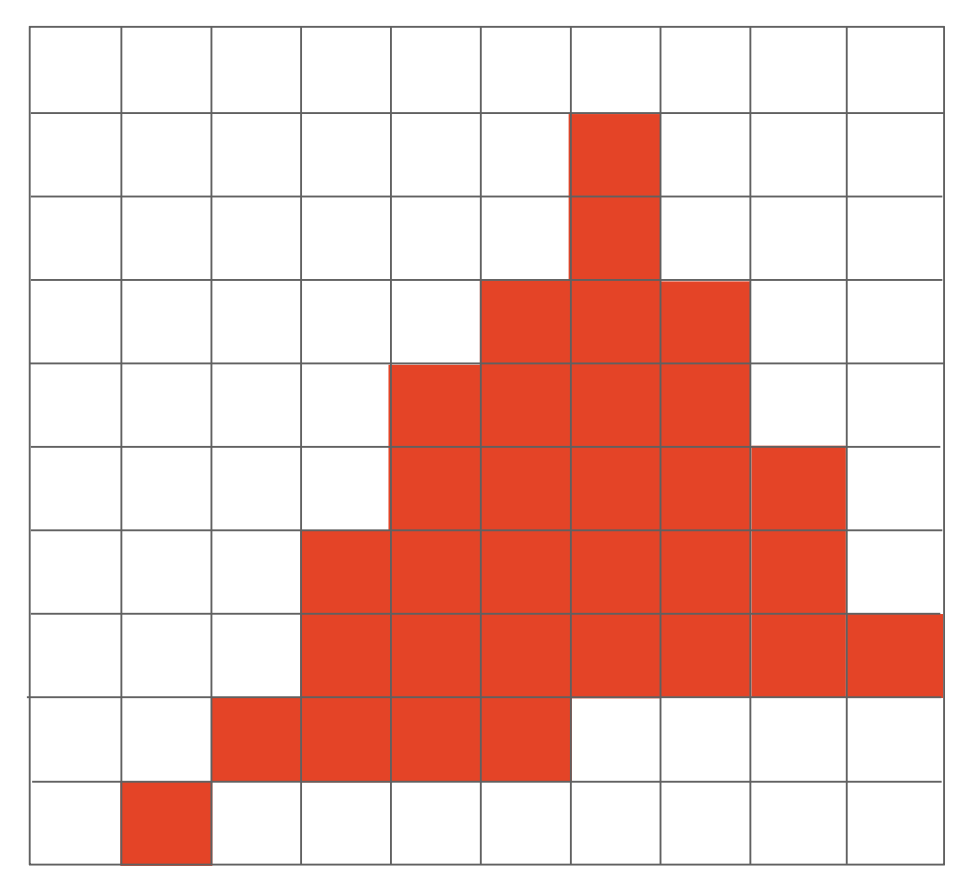
虽然像素的排列遵循原来的三角形,但形状上还是差的有点多,边缘一点也不平整,出现了一种叫做锯齿(jaggies) 的东西。图形带锯齿的现象又称为走样(aliasing),之后会介绍如何处理该问题。
Rasterization on Real Displays⚓︎
下面展示了真实的 LCD 屏幕像素:
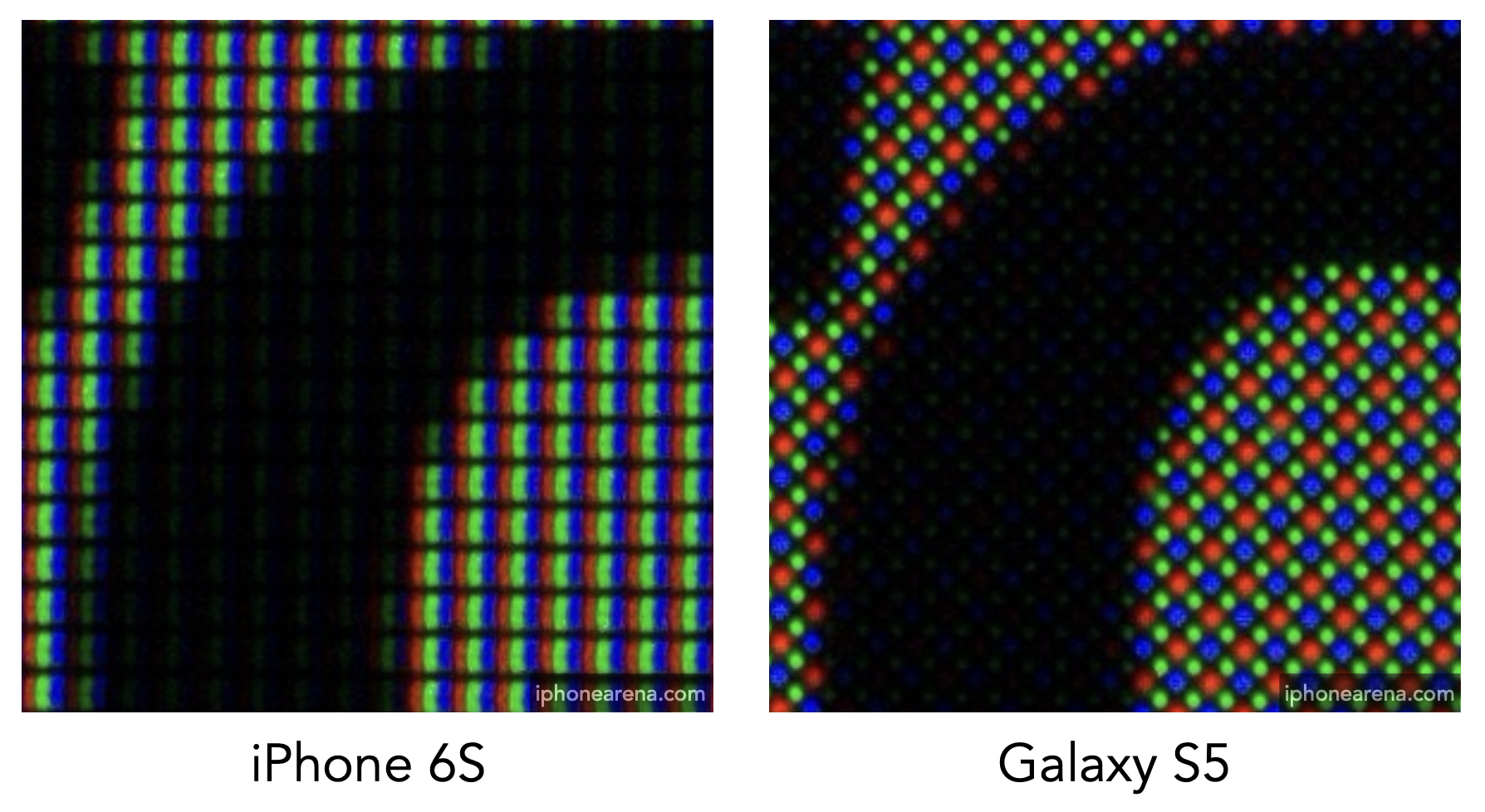
- 注意到这两部手机的像素的几何形状有一定差异,并且和之前假设的“像素是一个小块”有着很大的不同
- 右图这种像素排列叫做 Bayer pattern,不难发现绿色的点多于红色和蓝色的点,因为人眼对绿色最为敏感
此外,在彩色打印机上,显示方法会更复杂:
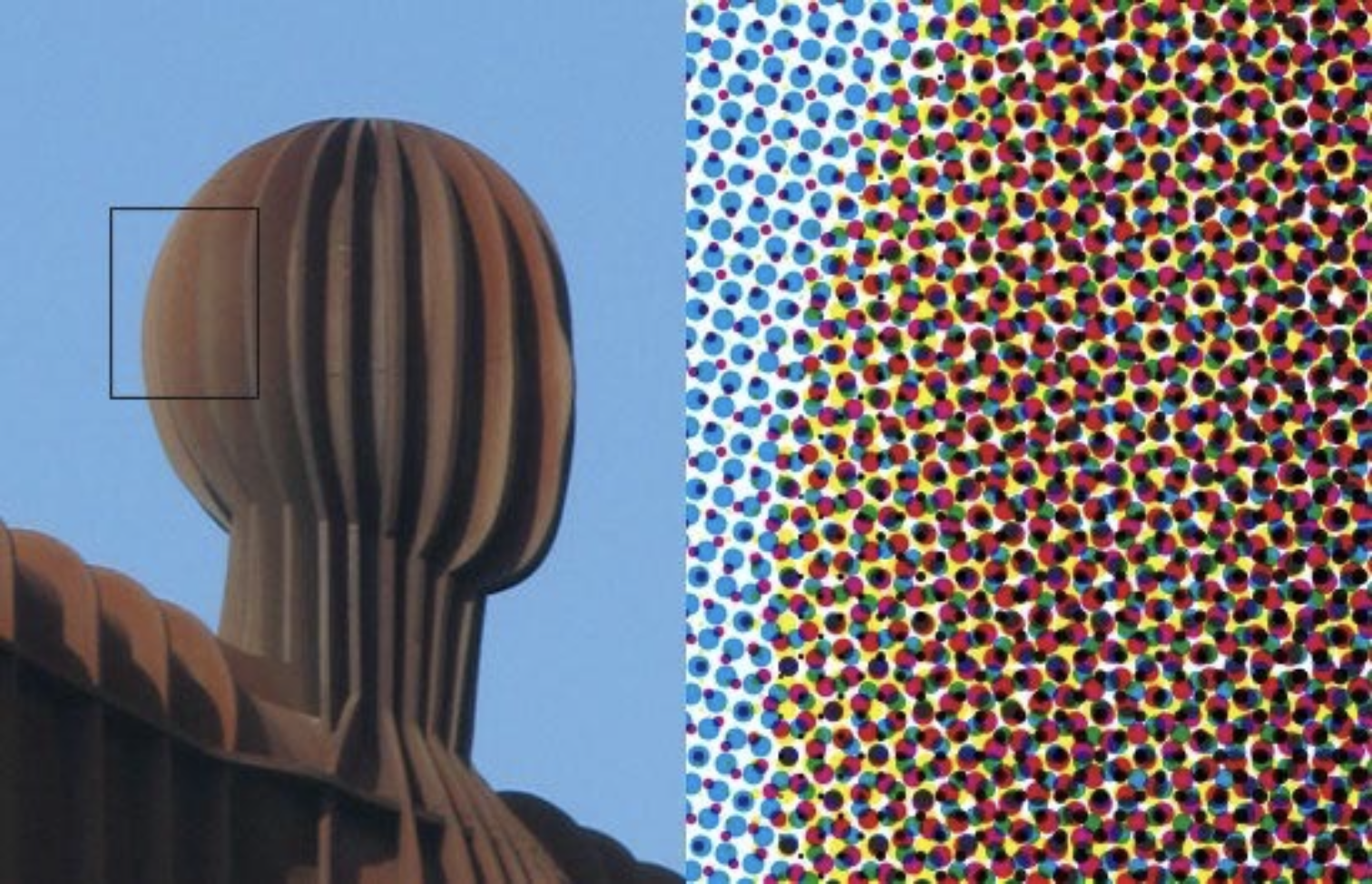
但不管如何,之后我们还是假设显示器的像素就是一个匀色的小方块。
Antialiasing⚓︎
Sampling Theory⚓︎
Sampling Artifacts⚓︎
采样在 CG 中是普遍存在的:
- 光栅化:在 2D 坐标上采样
-
照片 (photograph):在图像传感器平面上采样

-
视频:在时间上采样
正因为被广泛使用,采样在实际运用时会遇到各种问题,称为采样瑕疵(sampling artifact(errors/mistakes/inacurracies)),包括了:
- 锯齿(jaggies):空间上的采样
- 也是走样的一个例子
-
摩尔纹(Moiré patterns):图像上出现的扭曲条纹,原因在于欠采样(undersampling)

-
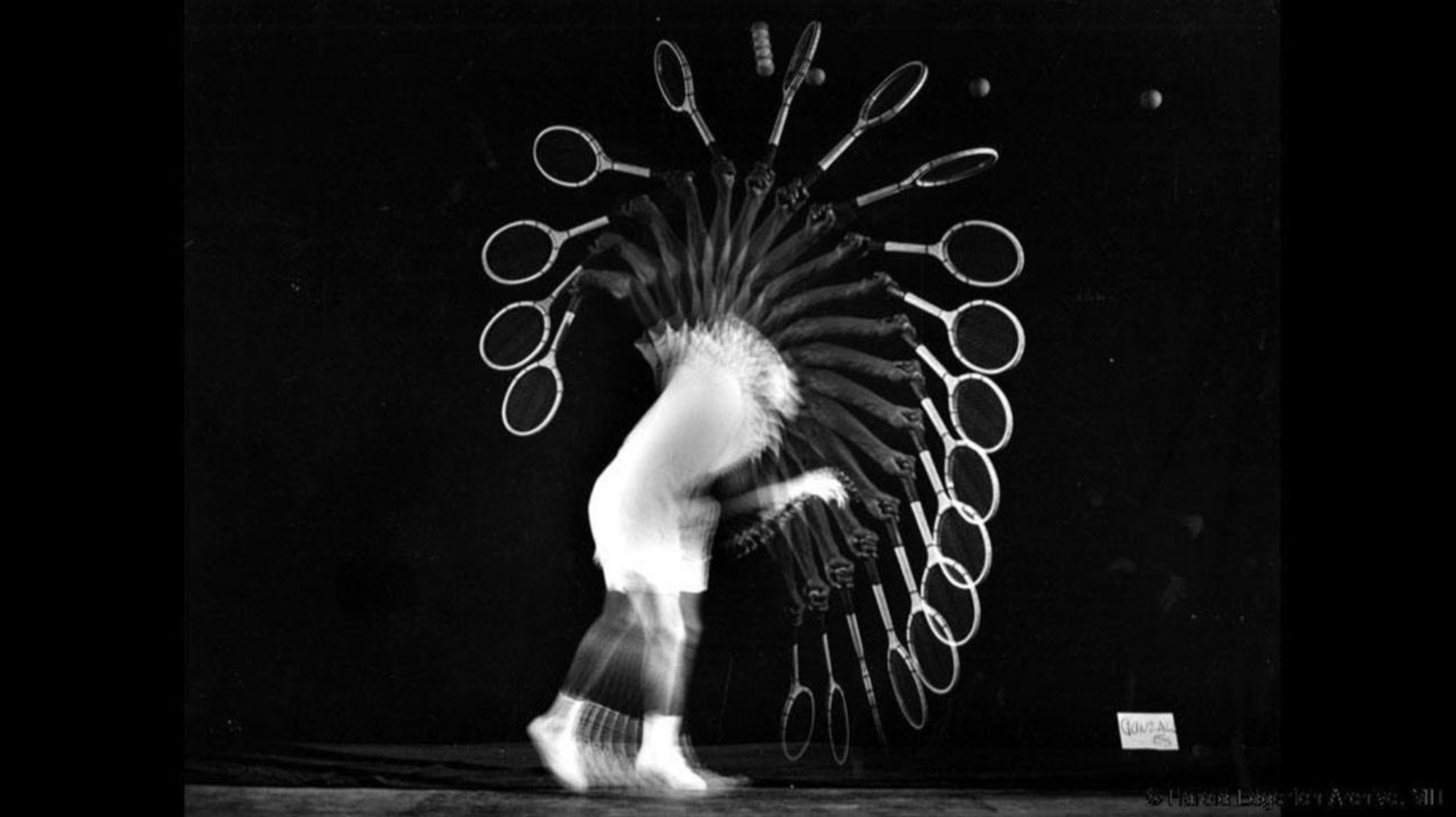
车轮错觉(wagon wheel illusion)(假动作 (false motion)
) :时间上的采样
-
...
这些采样瑕疵出现的原因都可以总结为:信号变化速度太快(高频率
Blurring(Pre-filtering)⚓︎
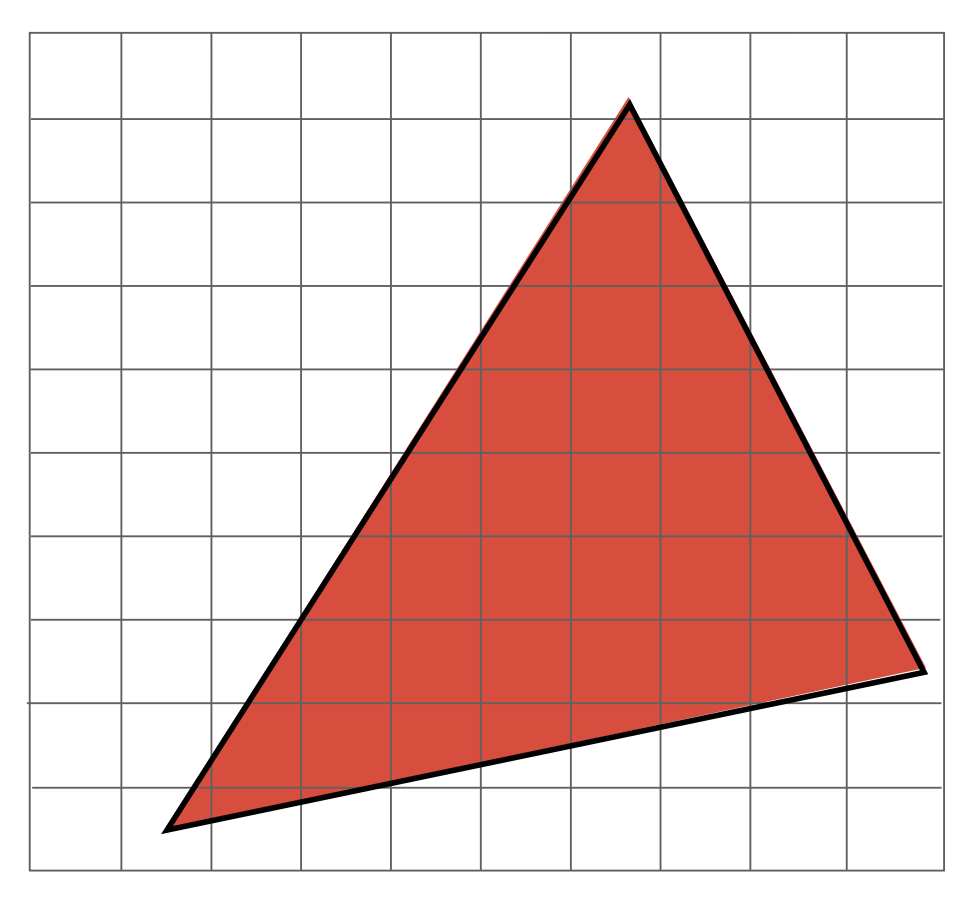
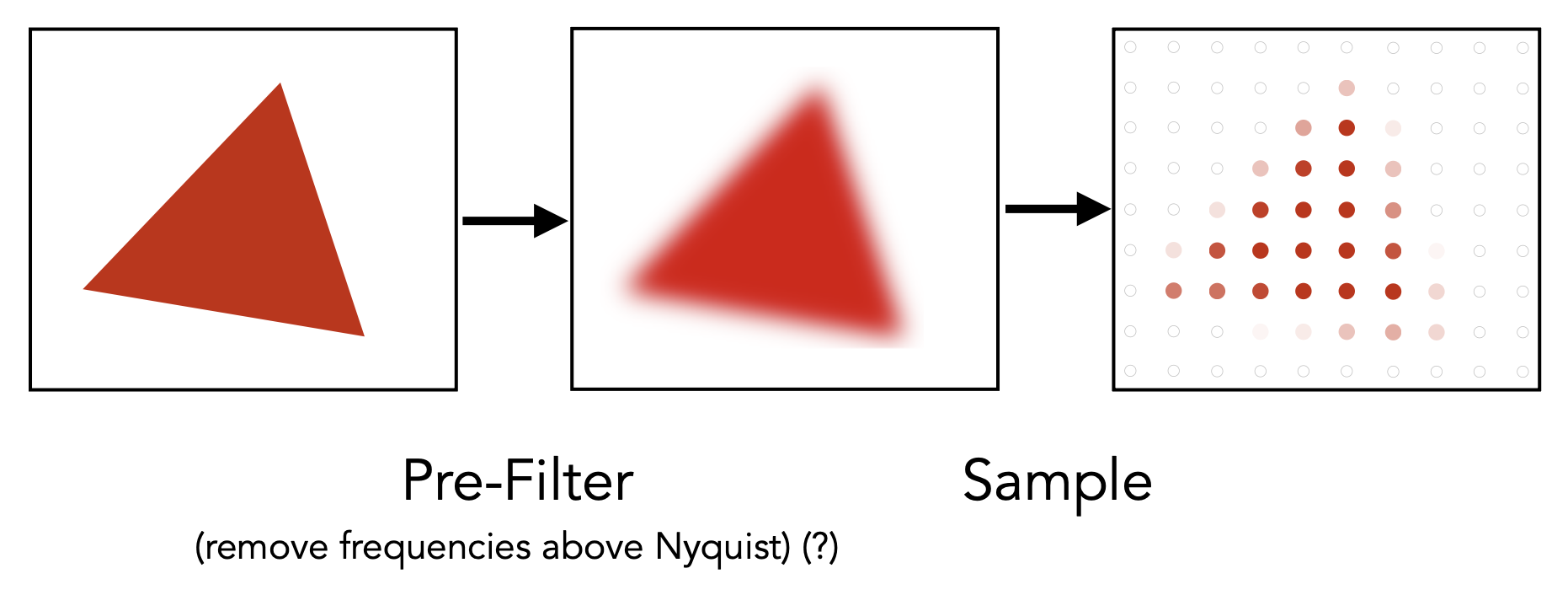
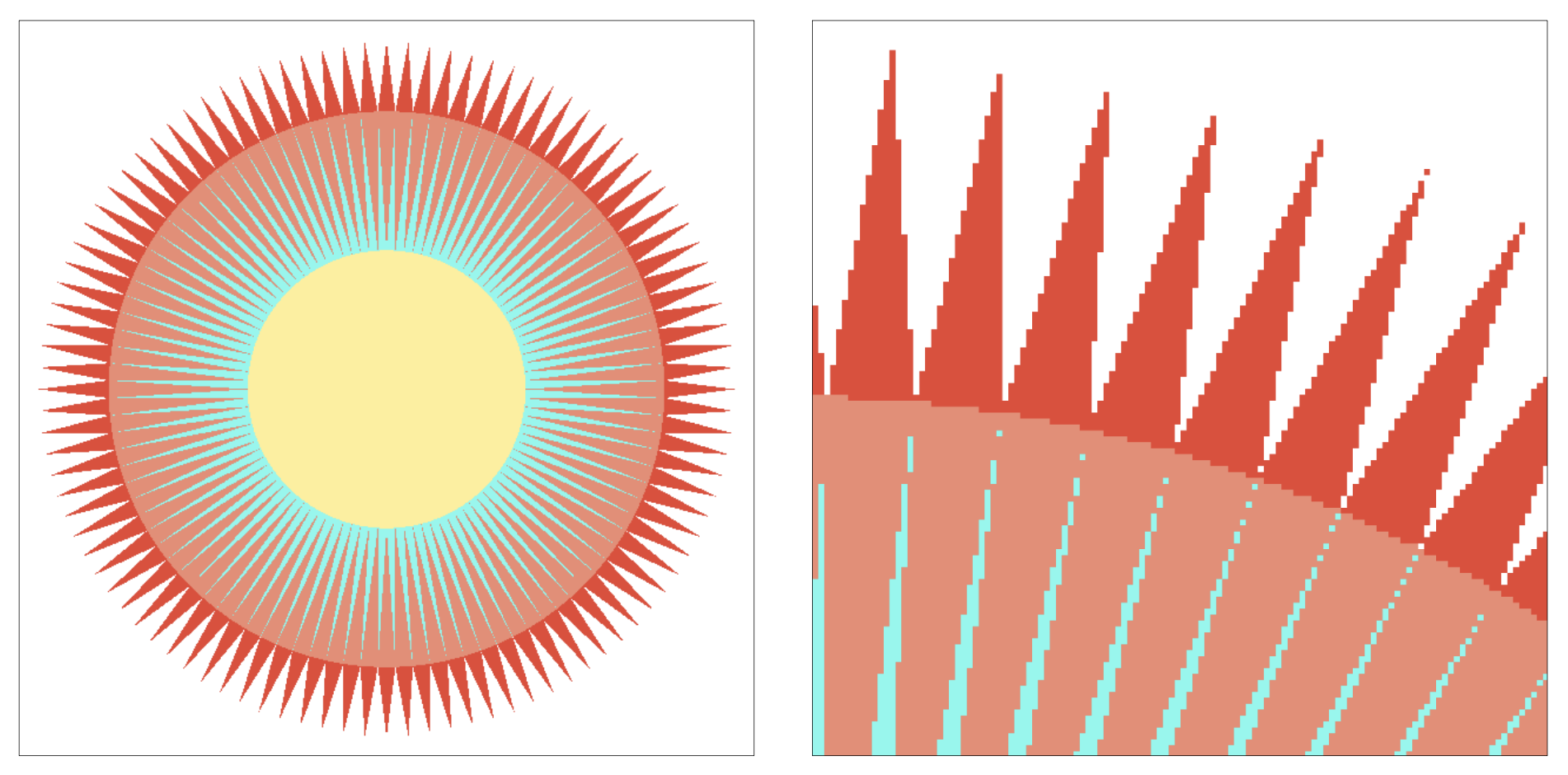
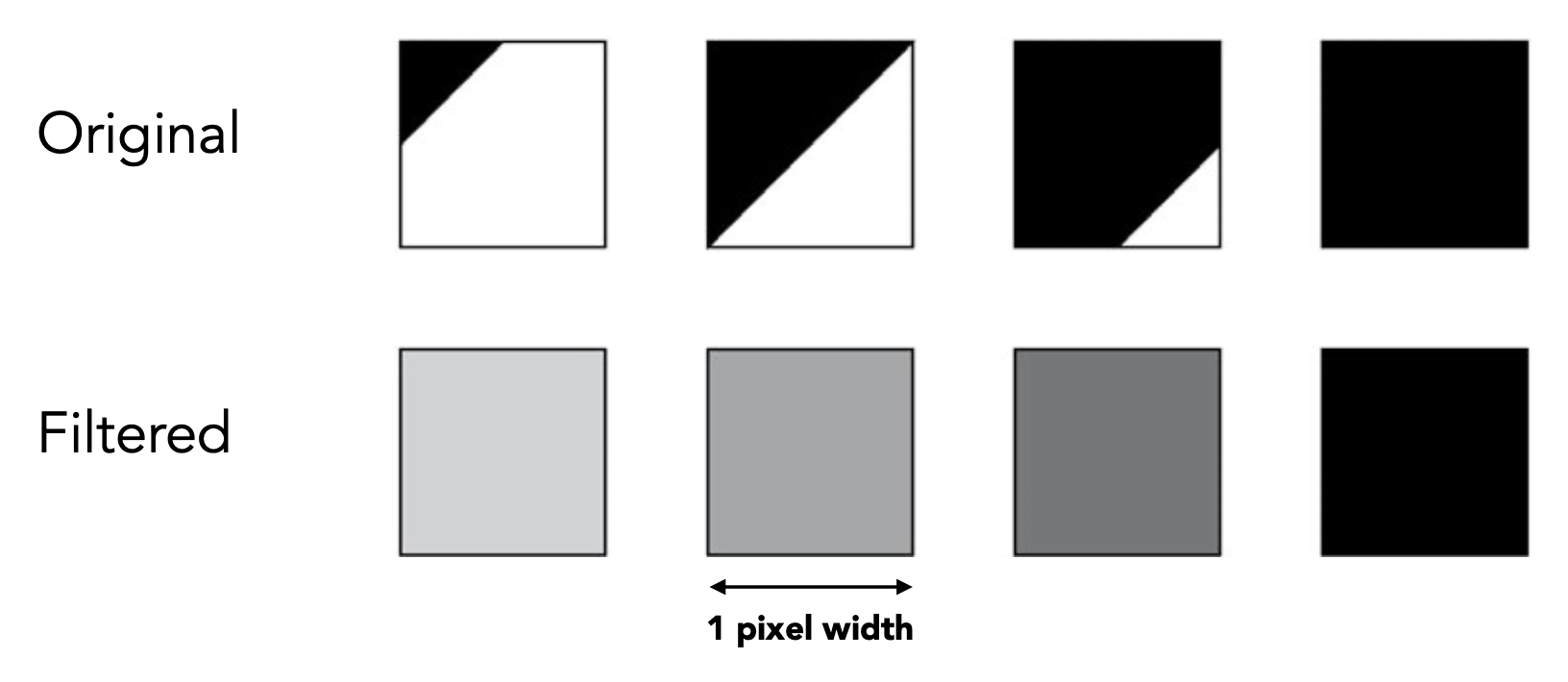
还是以红色三角形为例,
-
如果直接在原图像采样,光栅化后的三角形就有很多锯齿,像素要么是红色,要么是白色
-
在采样前先做一步预滤波(pre-filter)(又称模糊(blur))后,原来光栅化后三角形的锯齿颜色就是渐变色的,看起来就没那么明显了,从而实现反走样的效果
例子
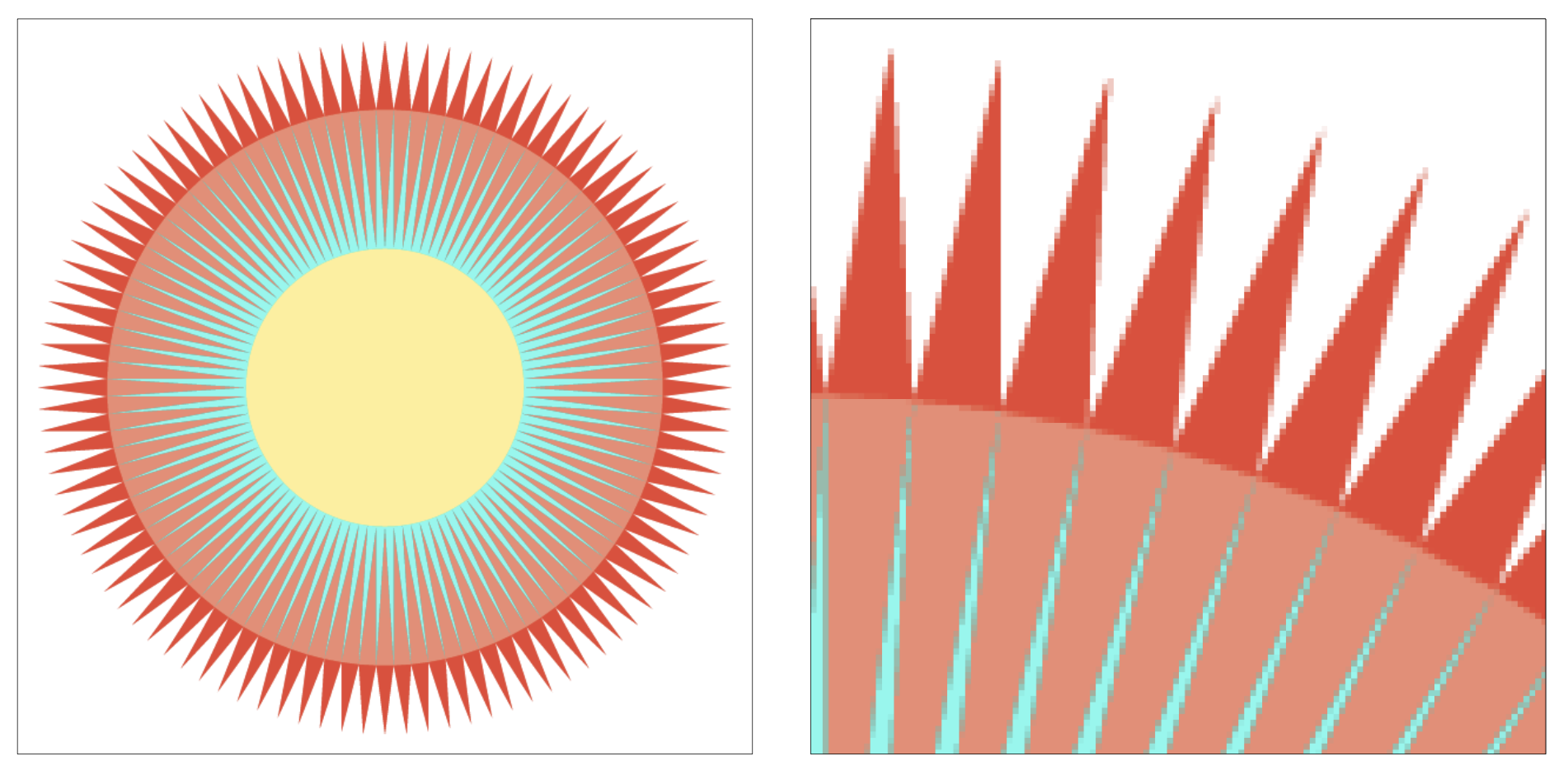
比对模糊前后的两张图:
如果先采样后模糊(滤波
到目前为止,也许读者会有以下疑惑:
- 为什么欠采样会导致走样呢?
- 为什么先预滤波再采样能够实现反走样呢?
下面就来探究背后的原因,以及如何实现反走样的光栅化。
Frequency Domain⚓︎
说到频率(frequency),自然无法回避中学学过的三角函数:
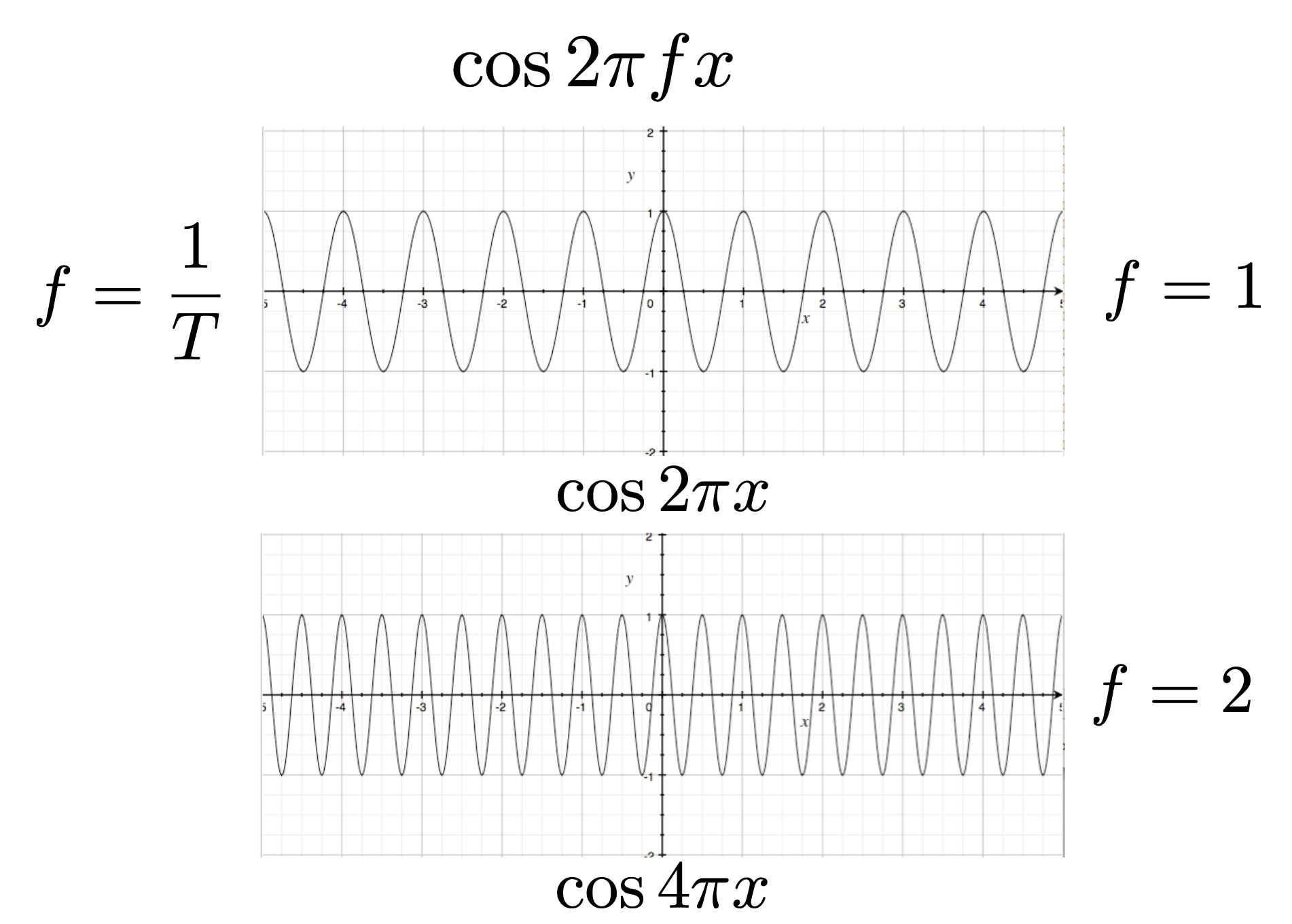
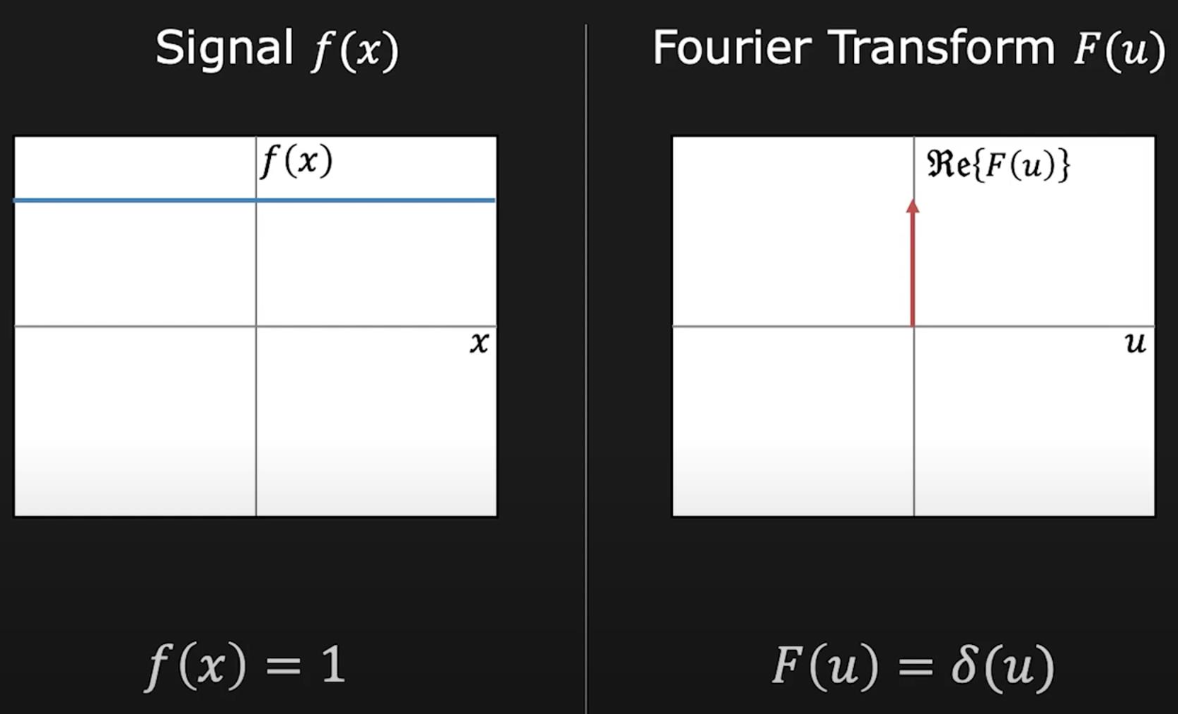
另外要介绍的一个重要概念是傅里叶变换(Fourier transform),它可以让一个函数表示为多个正弦和余弦函数之和。
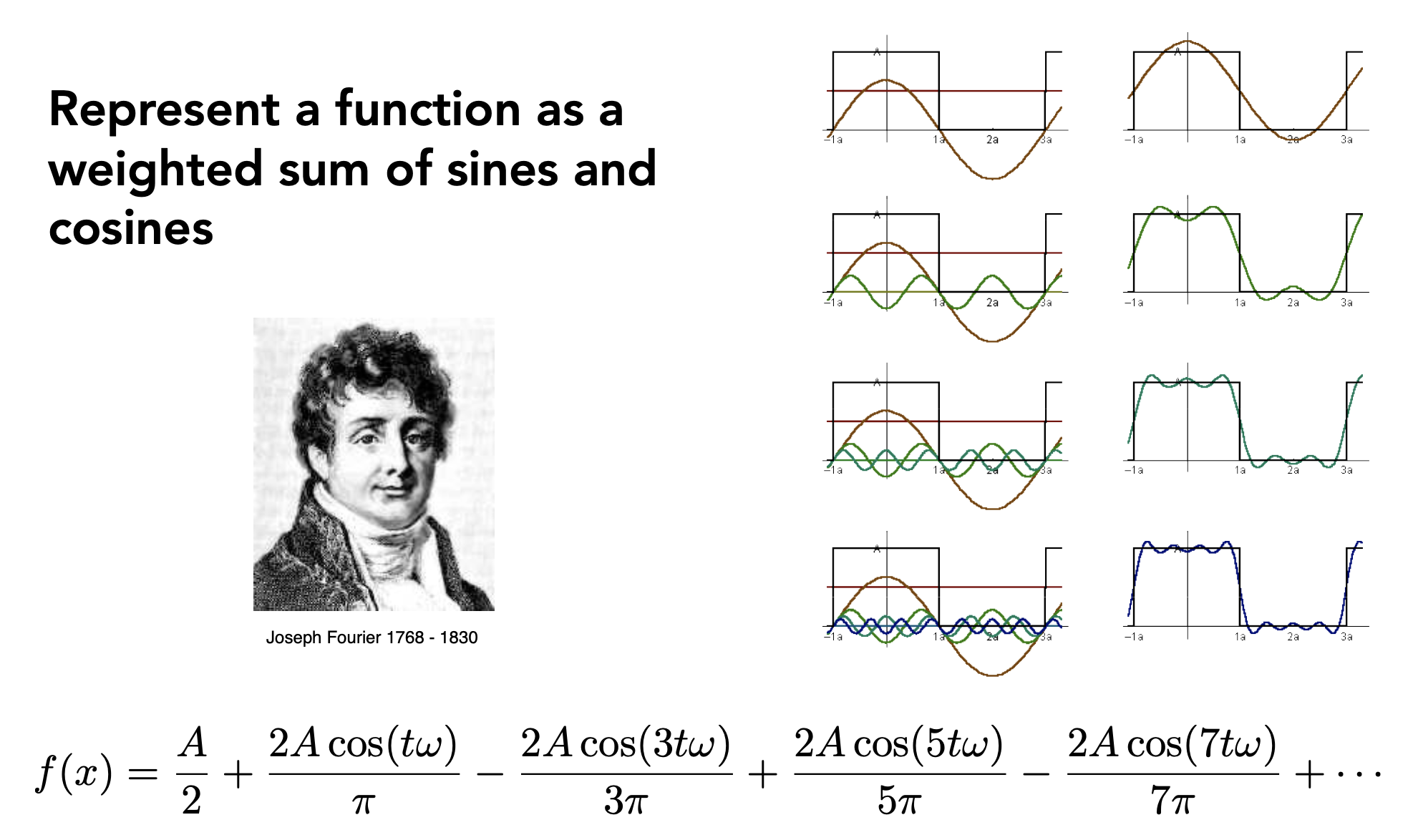
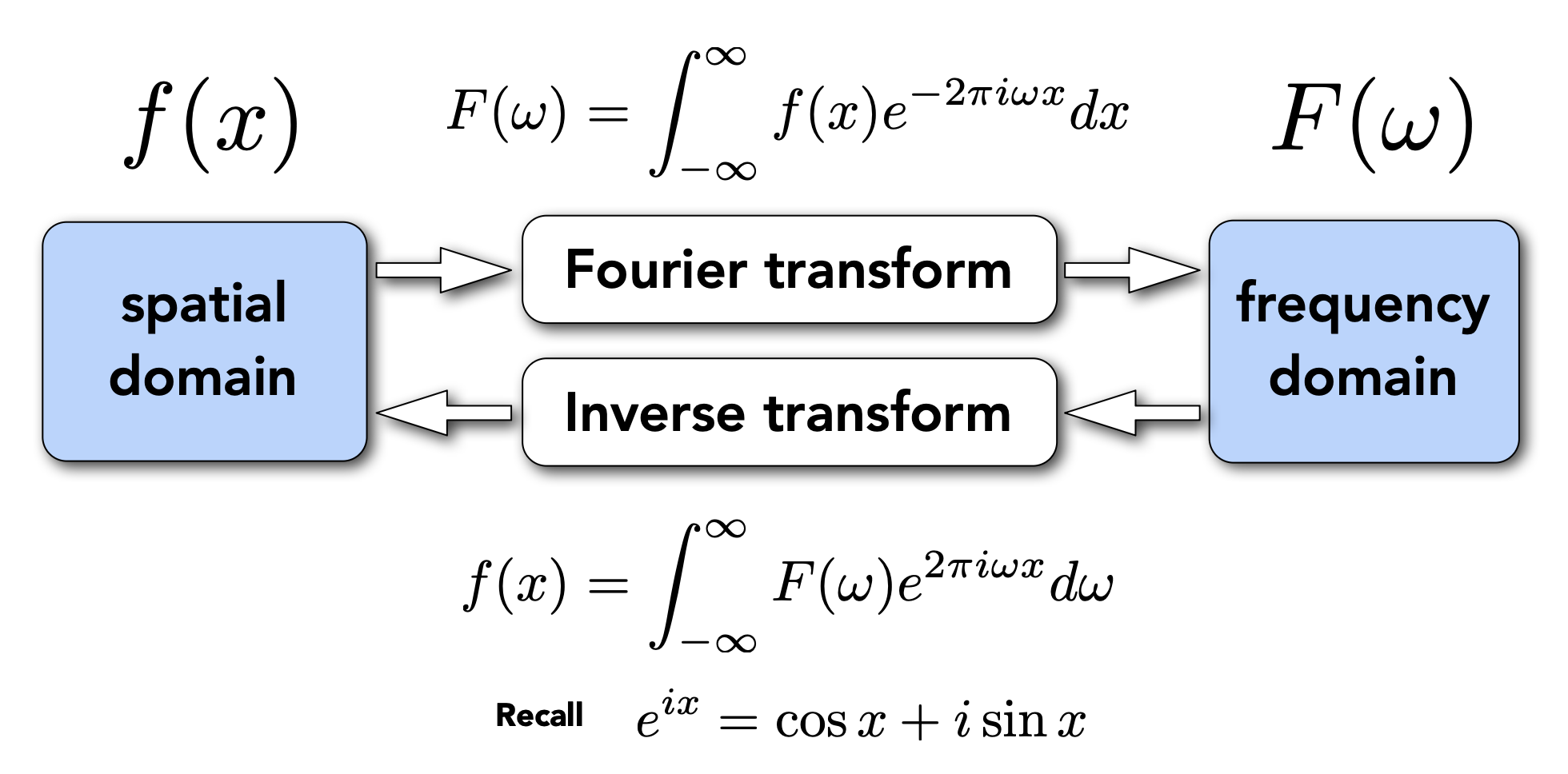
傅里叶变换的作用就是把一个信号(空间域(spatial domain))分解为一个个频率(频域(frequency domain)
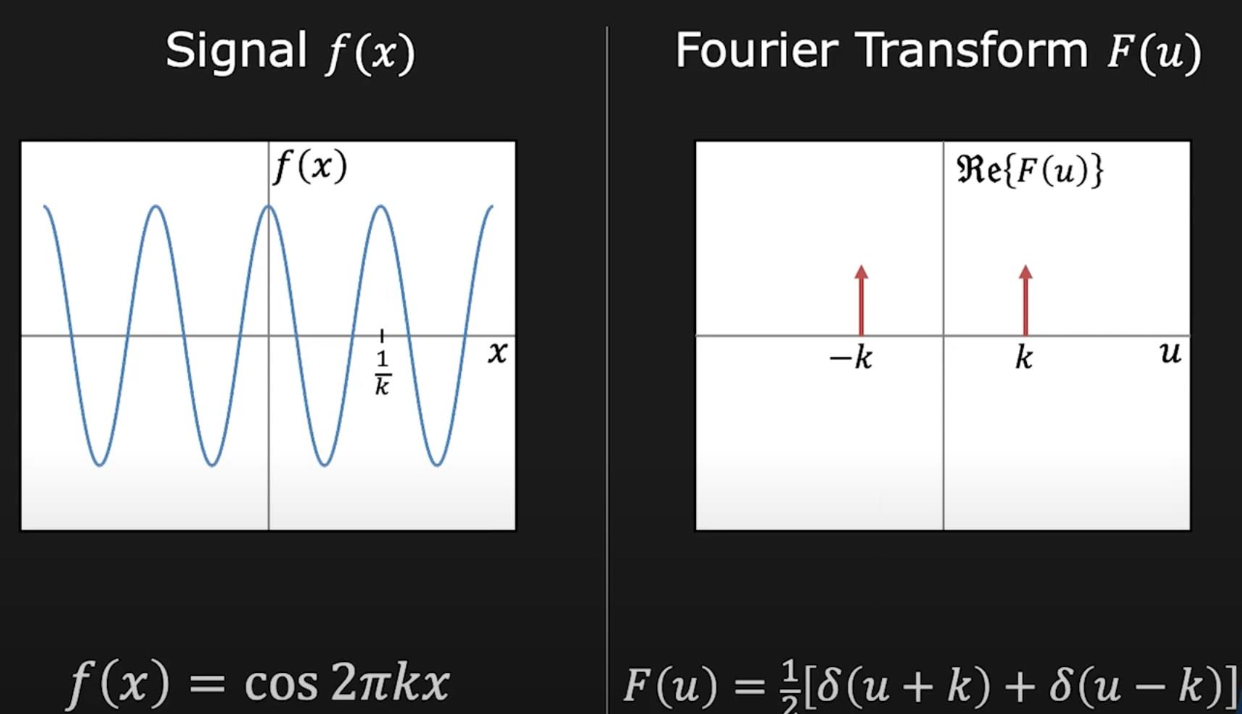
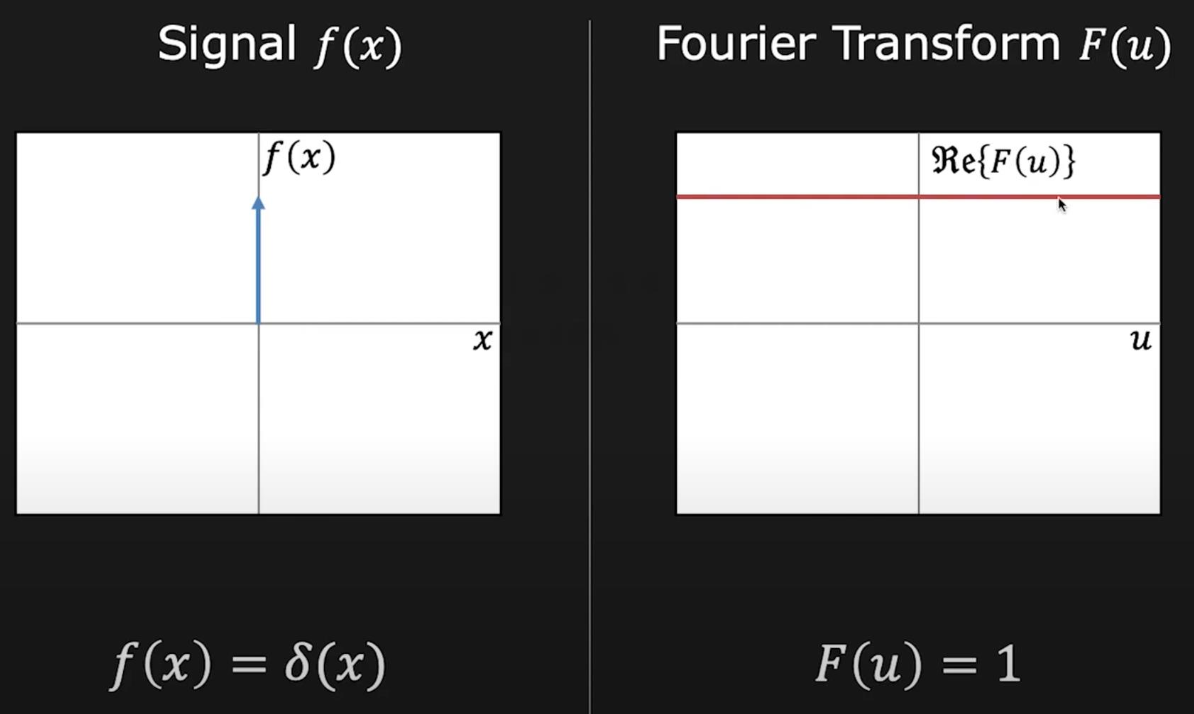
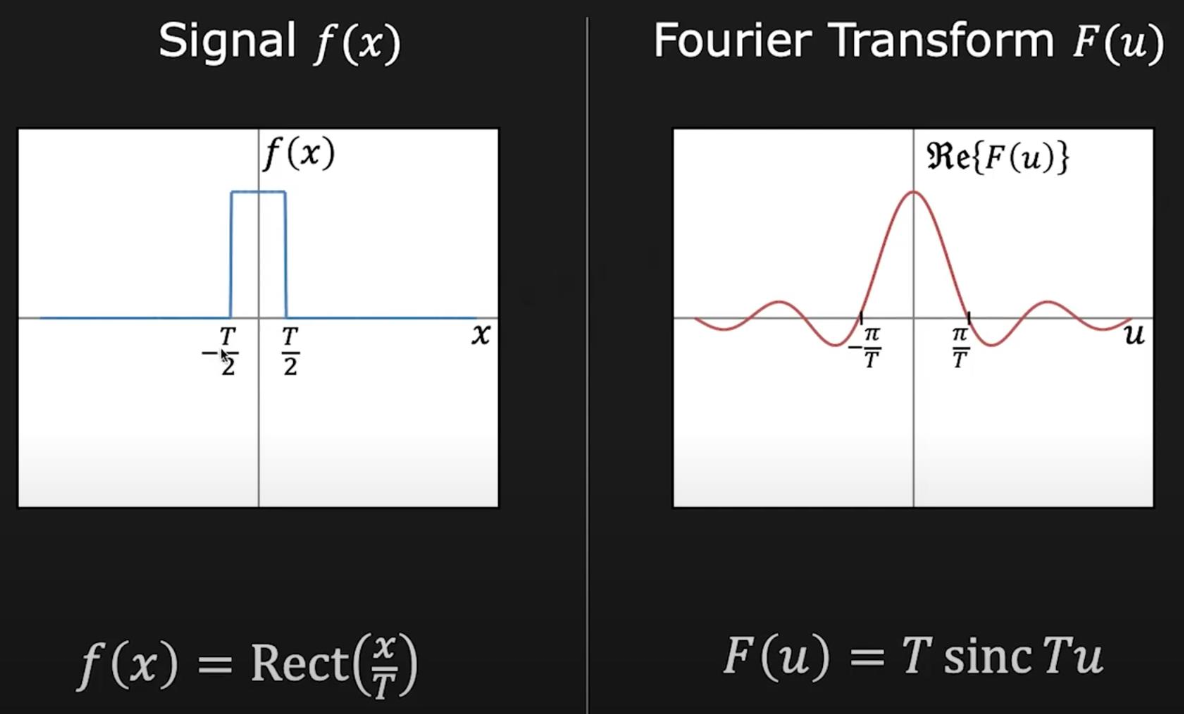
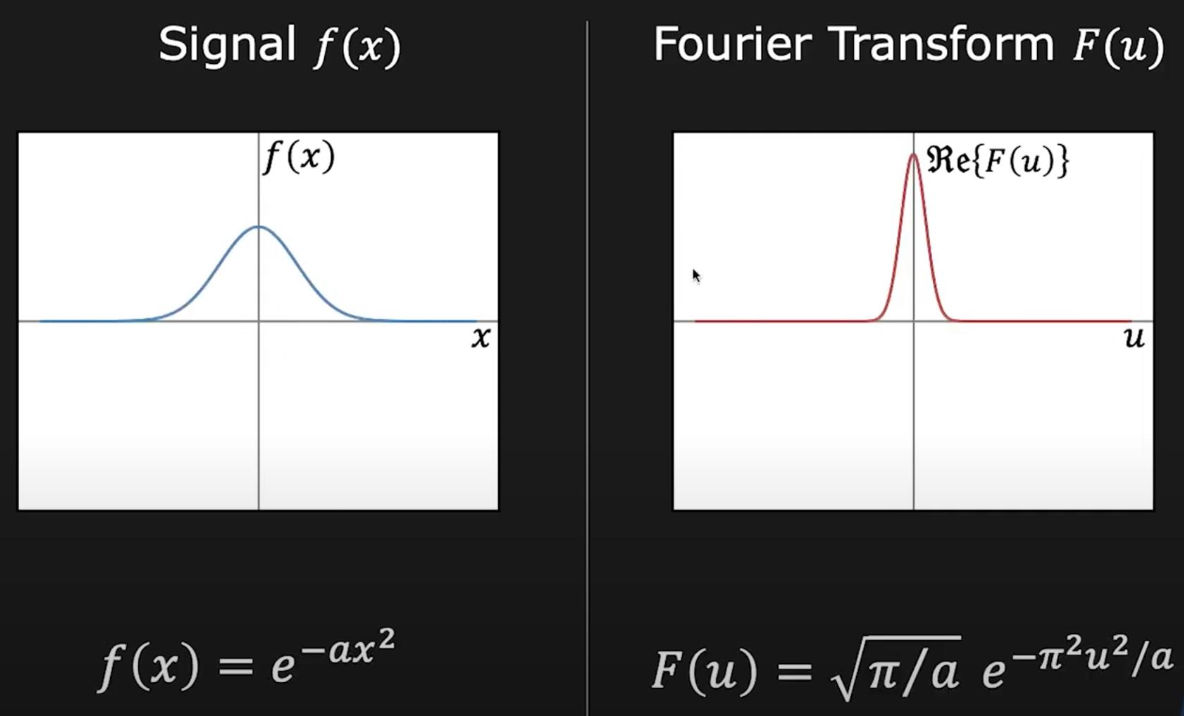
一些函数的傅里叶变换
从下图可以看出,更高的频率需要更快的采样,否则就会出现根据采样结果重构而成的信号和原信号相差过大(更像是低频信号)的问题。
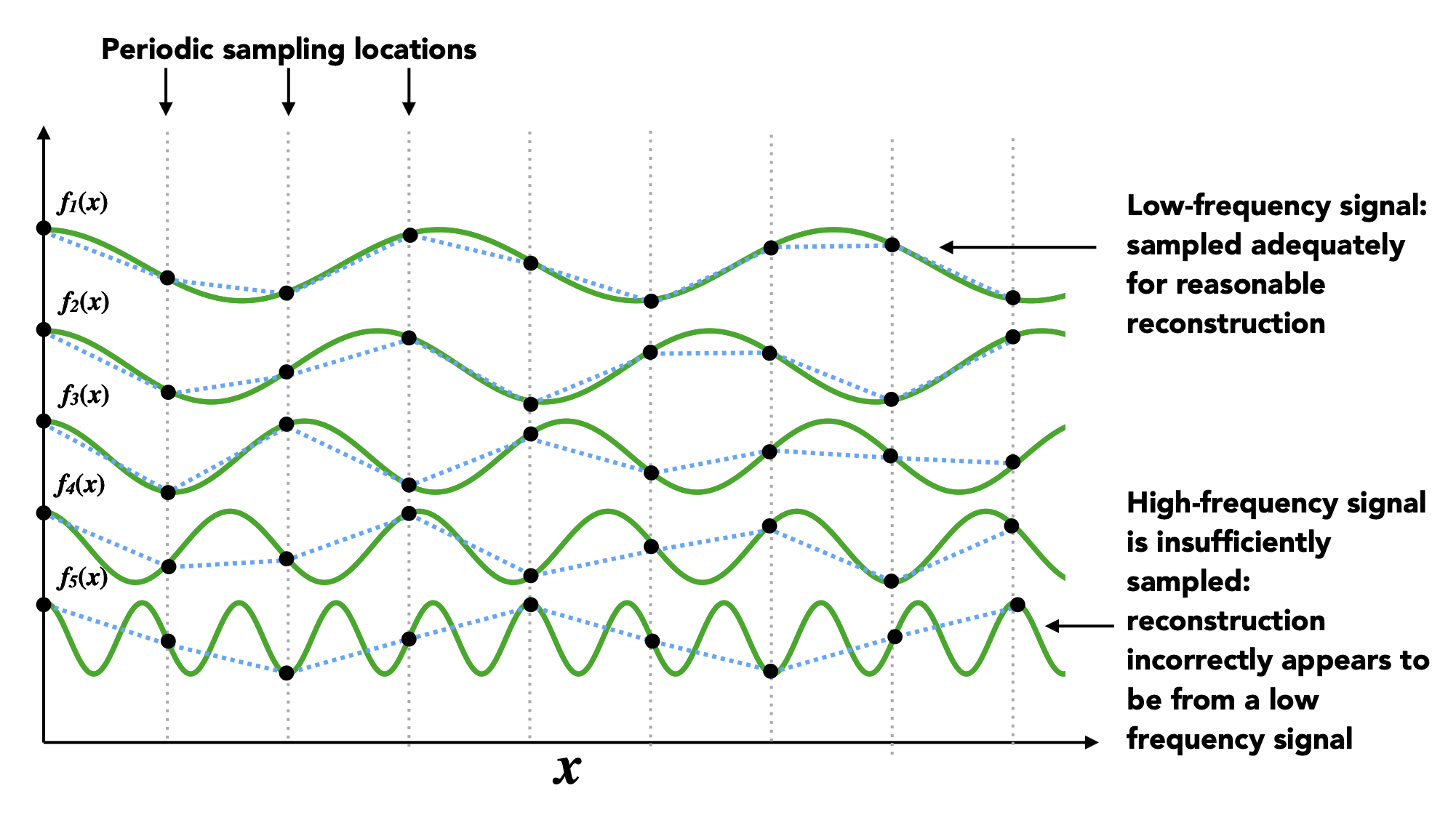
也就是说,正是欠采样导致了频率走样的现象。这里的「走样」(aliasing) 就是指对于给定的采样率,无法根据采样结果区分两种频率的信号。
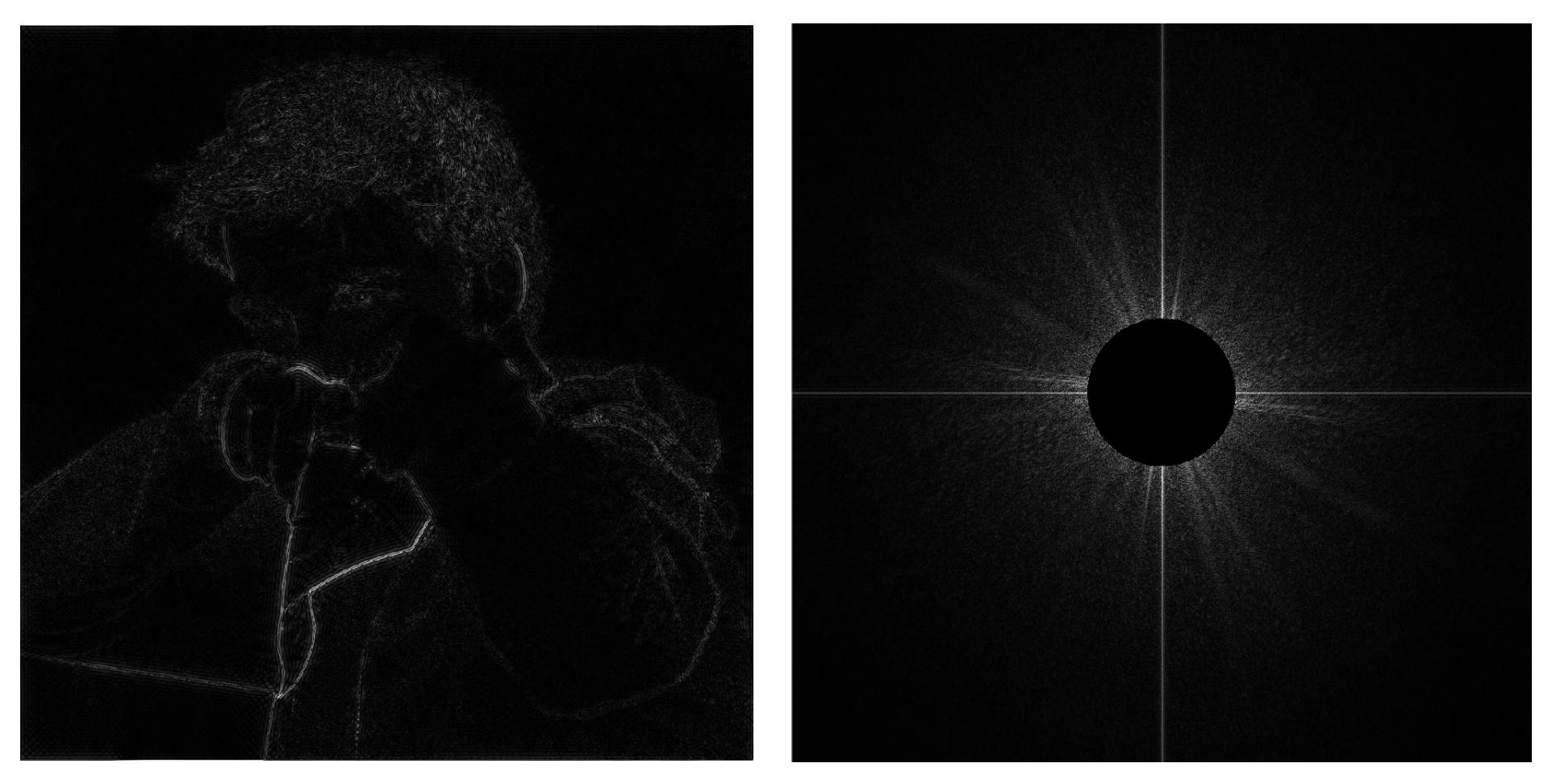
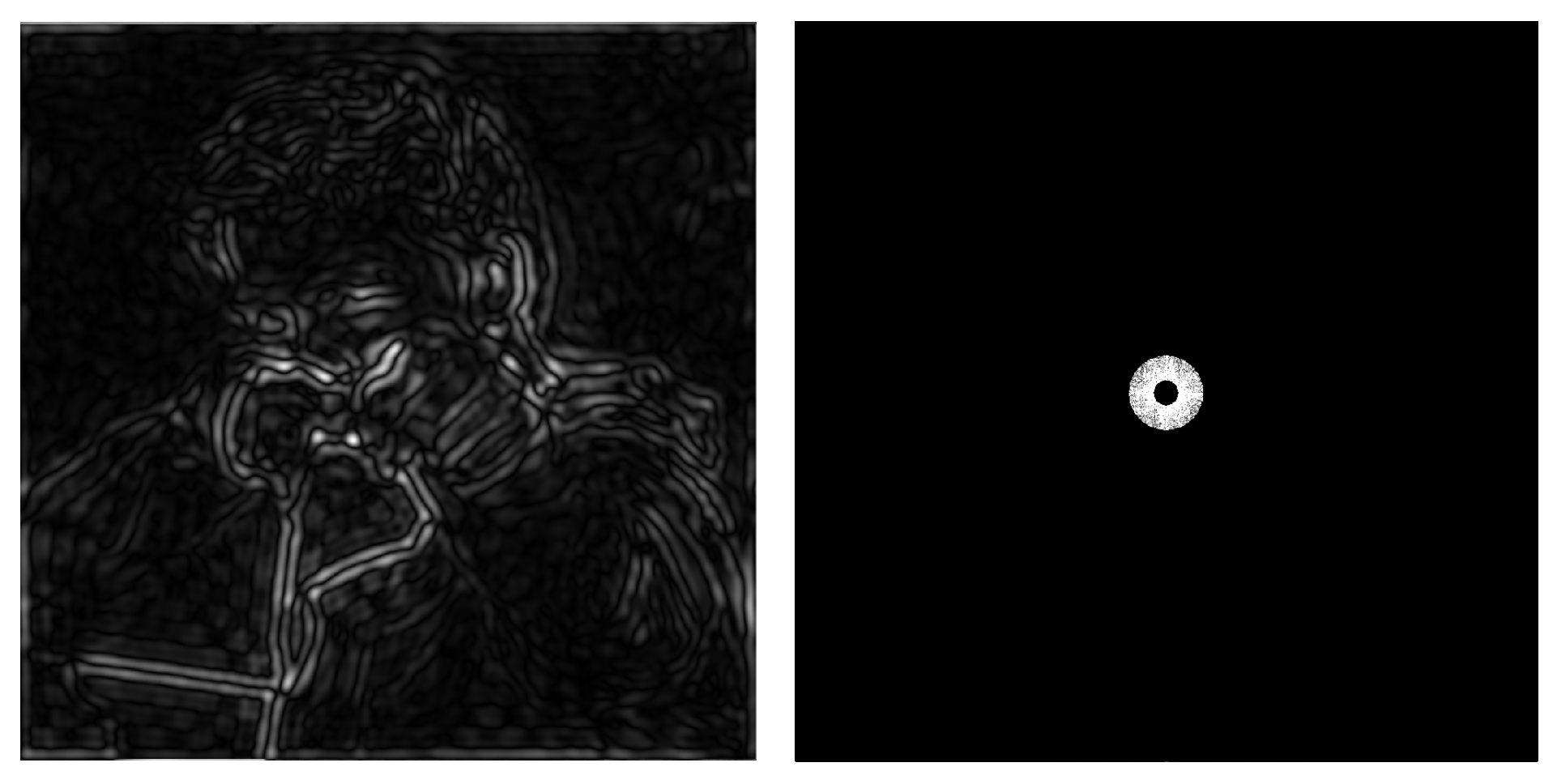
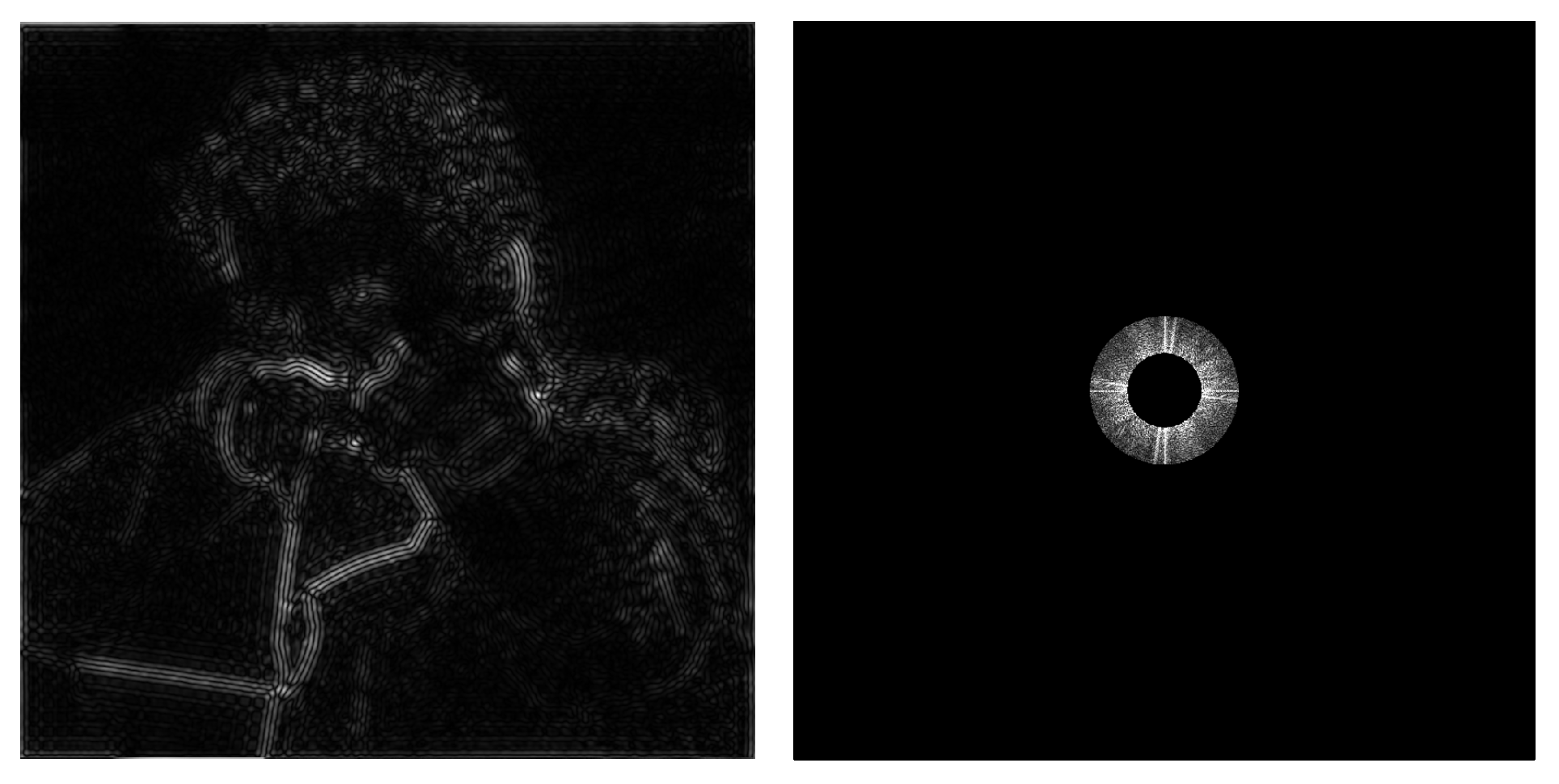
而滤波要做的就是移除某些特定频率的内容。对于下面两幅图,右图是左图在频域上的表现,越亮表示频率越低。


Convolution⚓︎
从另一个角度看,滤波做的事就是一种卷积(convolution)。我们可以将卷积简单理解为“求平均数”:对于一排点,逐点地在滑动窗口 (sliding window)(即滤波器(filter))内求平均值。
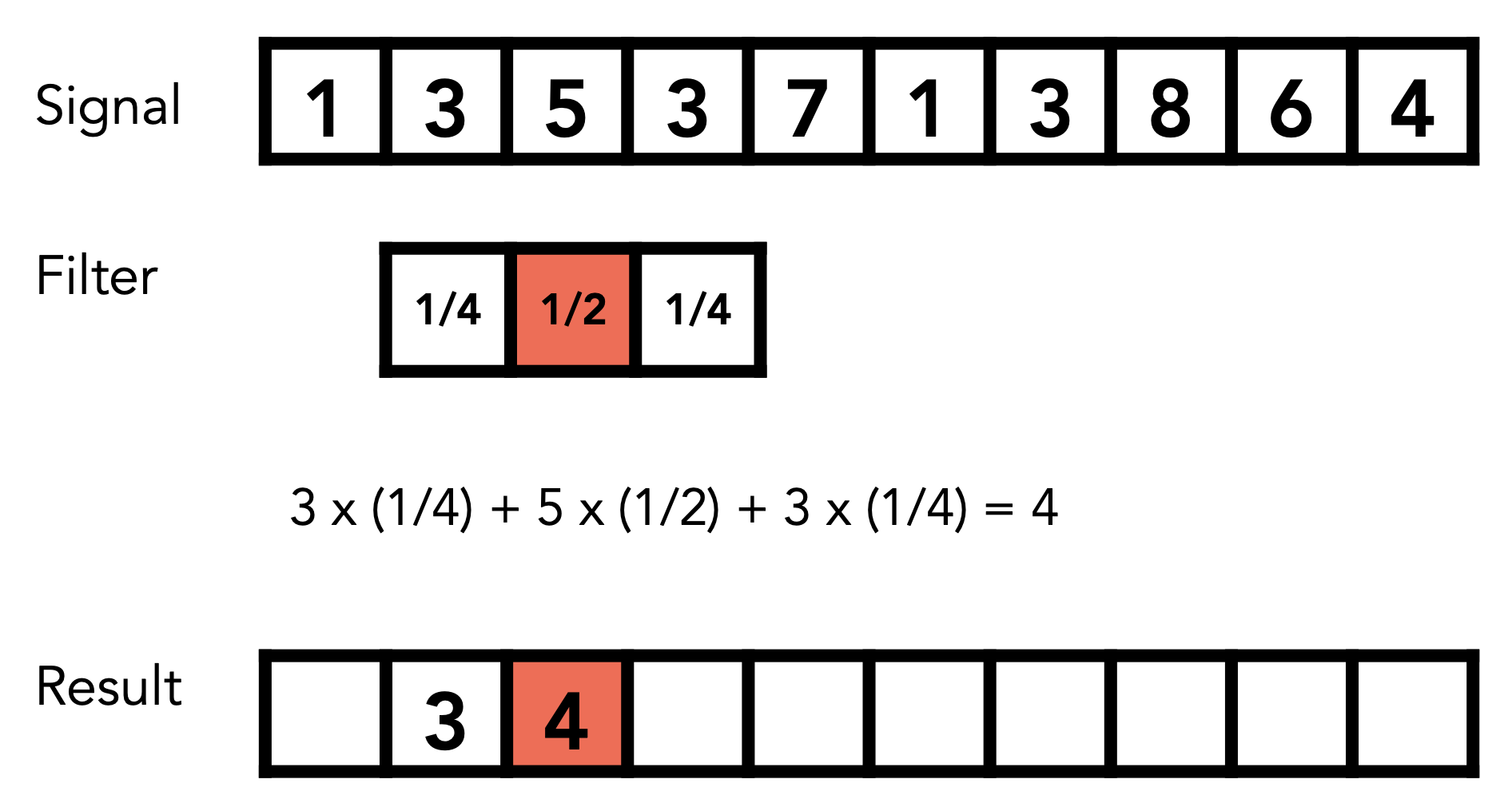
卷积定理 (convolution theorem)
空间域上的卷积 = 频域上的乘法,空间域上的乘法 = 频域上的卷积
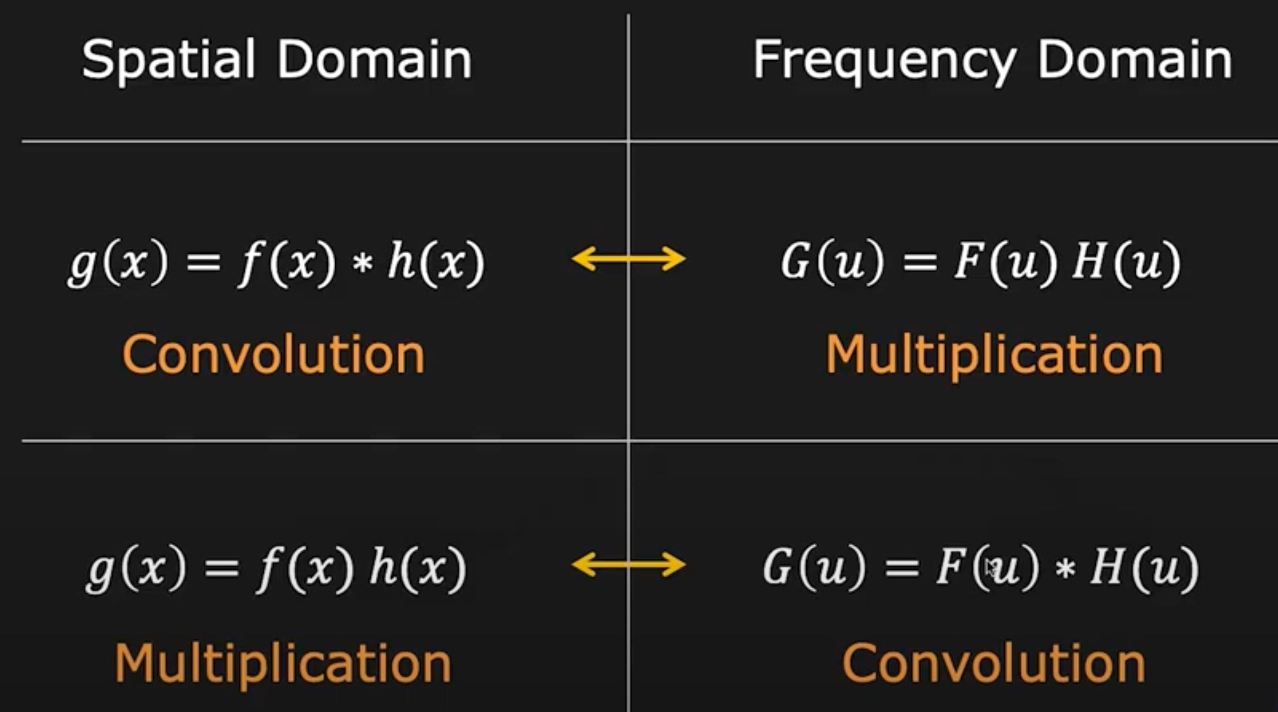
由此带来以下选择:
- 选择 1:在空间域上用卷积滤波
- 选择 2(选择 1 的等价操作,更麻烦,一般不会这么做
) :- 先变换到频域上(傅里叶变换)
- 再乘以卷积核的傅里叶变换
- 最后转换回空间域上(逆向傅里叶变换)
例子
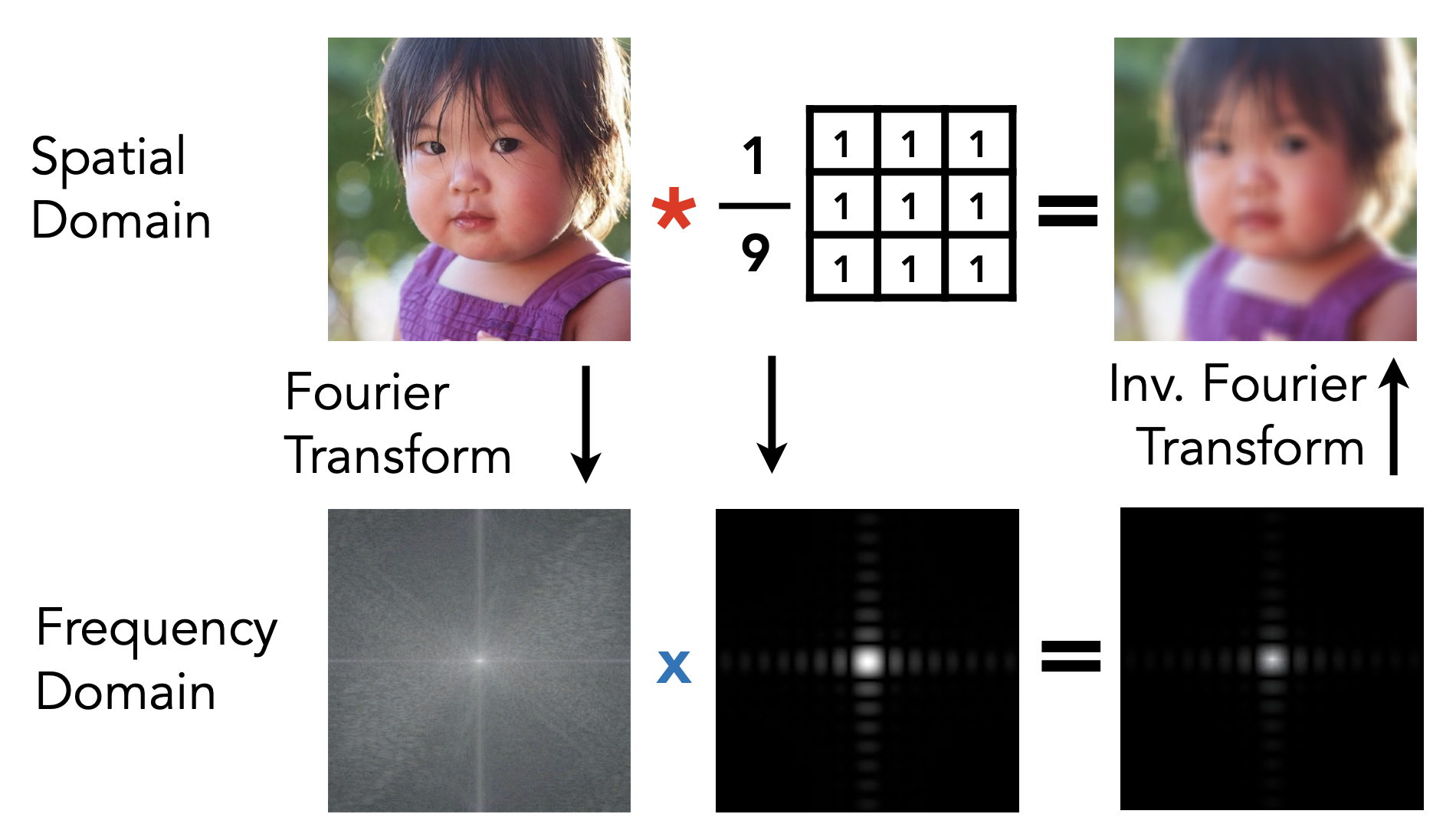
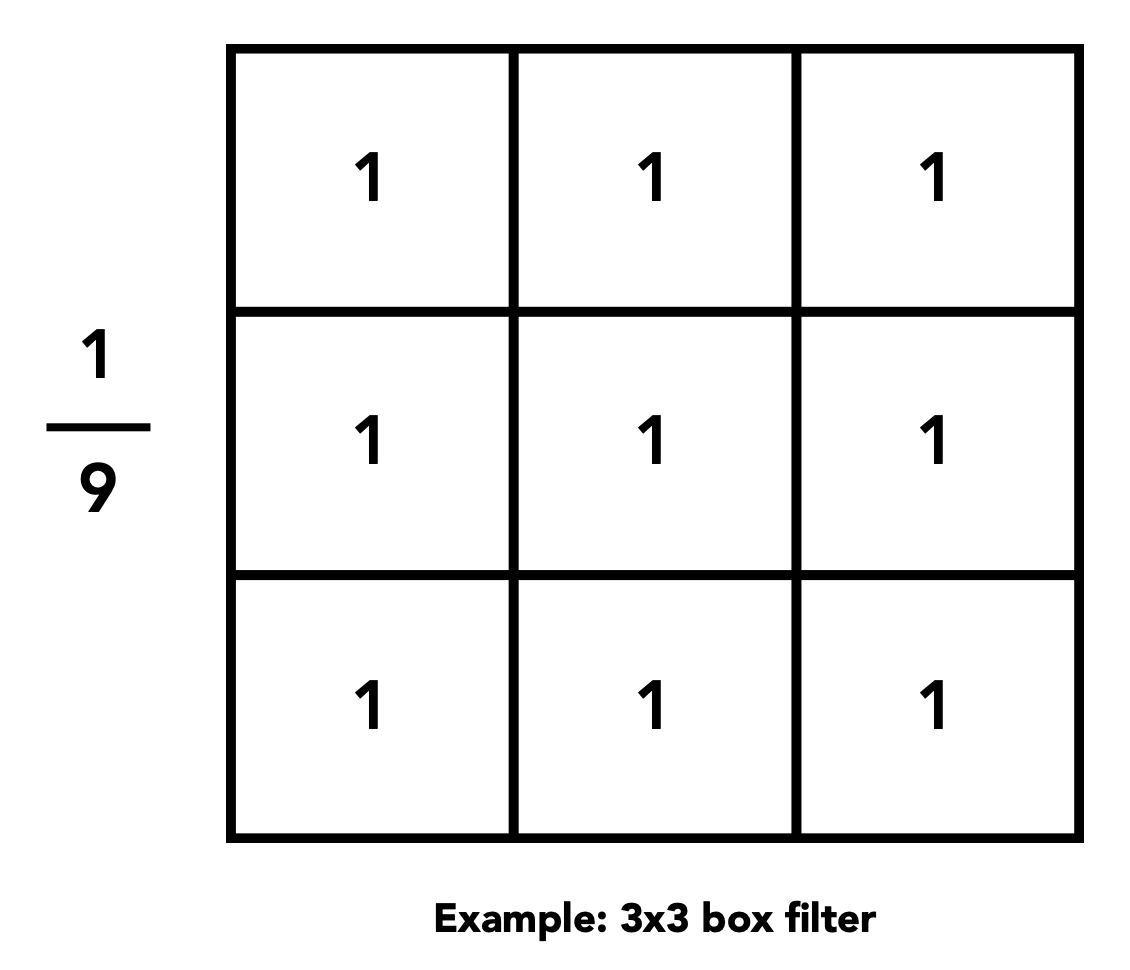
注意到滤波器上各元素之和为 1——做过归一化处理,确保图像亮度不会有明显改变。
在 2D 的图像上,滤波器也是 2D 的,而且一般也是方形的,故称为盒滤波器(box filter)(又称均值滤波器 (mean filter)
这样的“盒函数”是一种低通滤波器:
滤波器越大,能通过的频率就越低。可以这样想,假如滤波器和图像本身一样大,那么滤波后的图像就只有模糊的一点,而频率越低图像越平滑 / 模糊;又比如滤波器只有一个像素那么大,那么滤波后的图像就和原图像一致,也就是说任何大小的频率都通过了。
Repeating Frequency Contents⚓︎
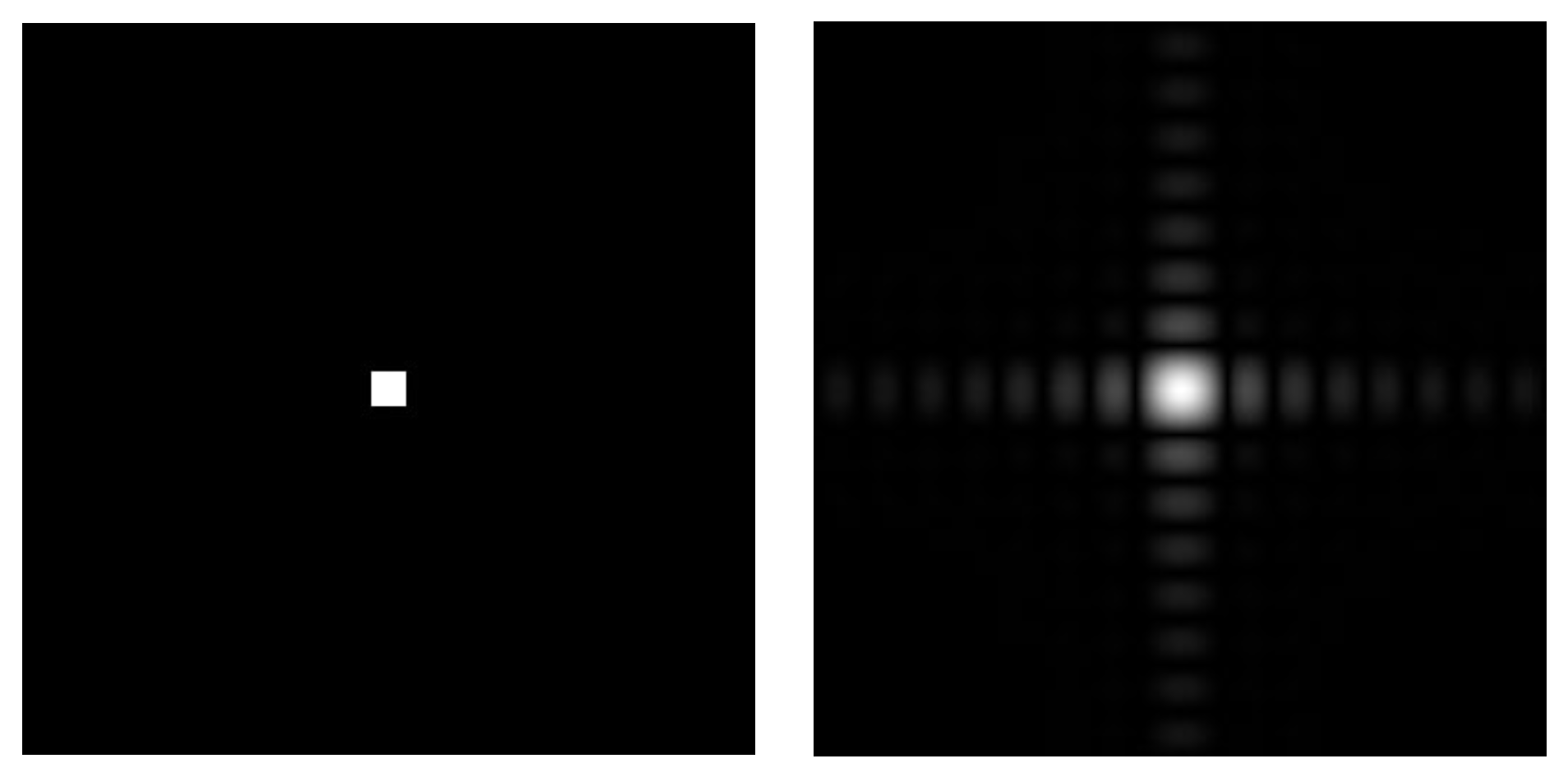
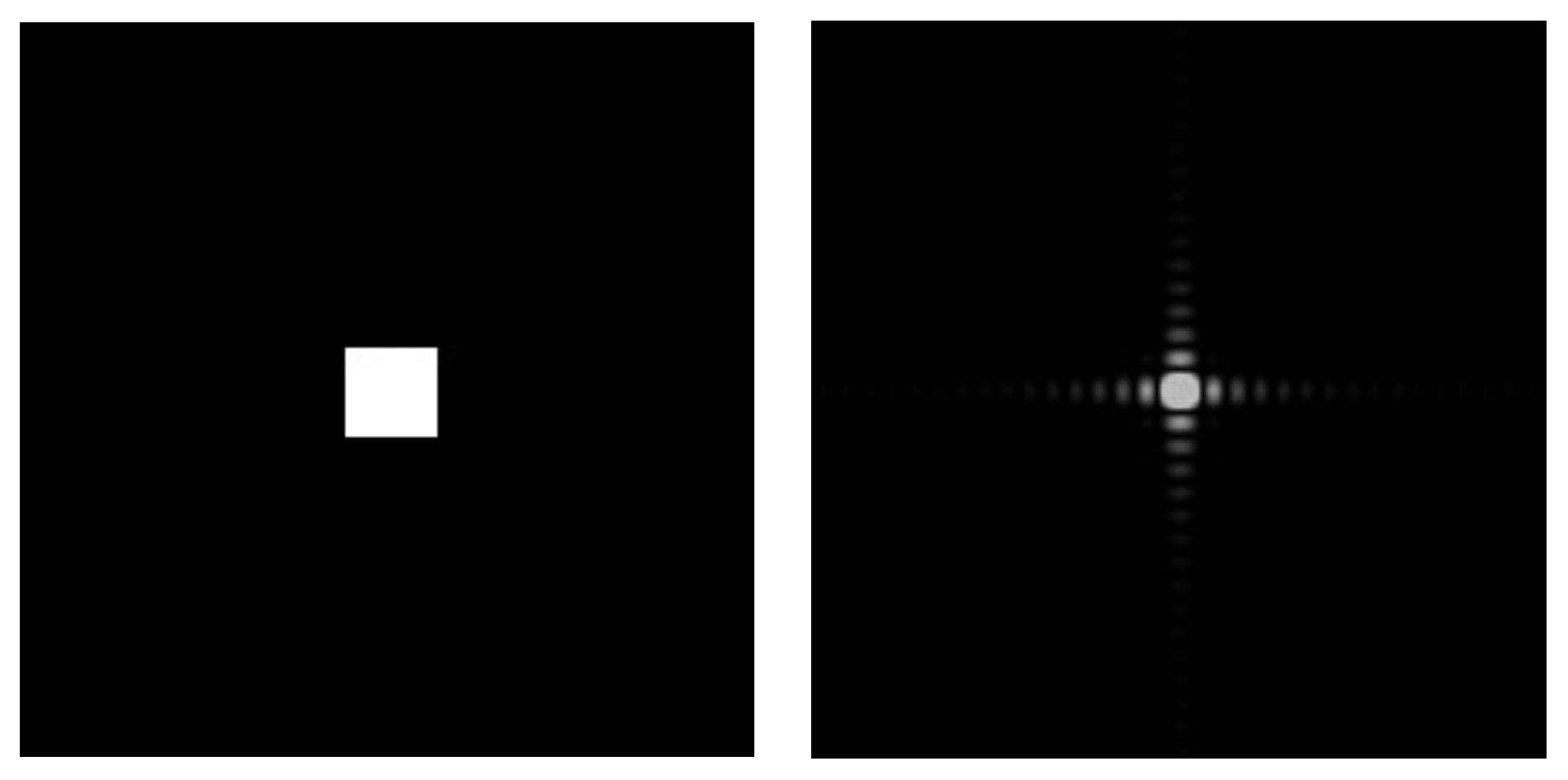
现在再从频域的角度看采样——采样就是在重复频域上的内容。来看下面几幅图:
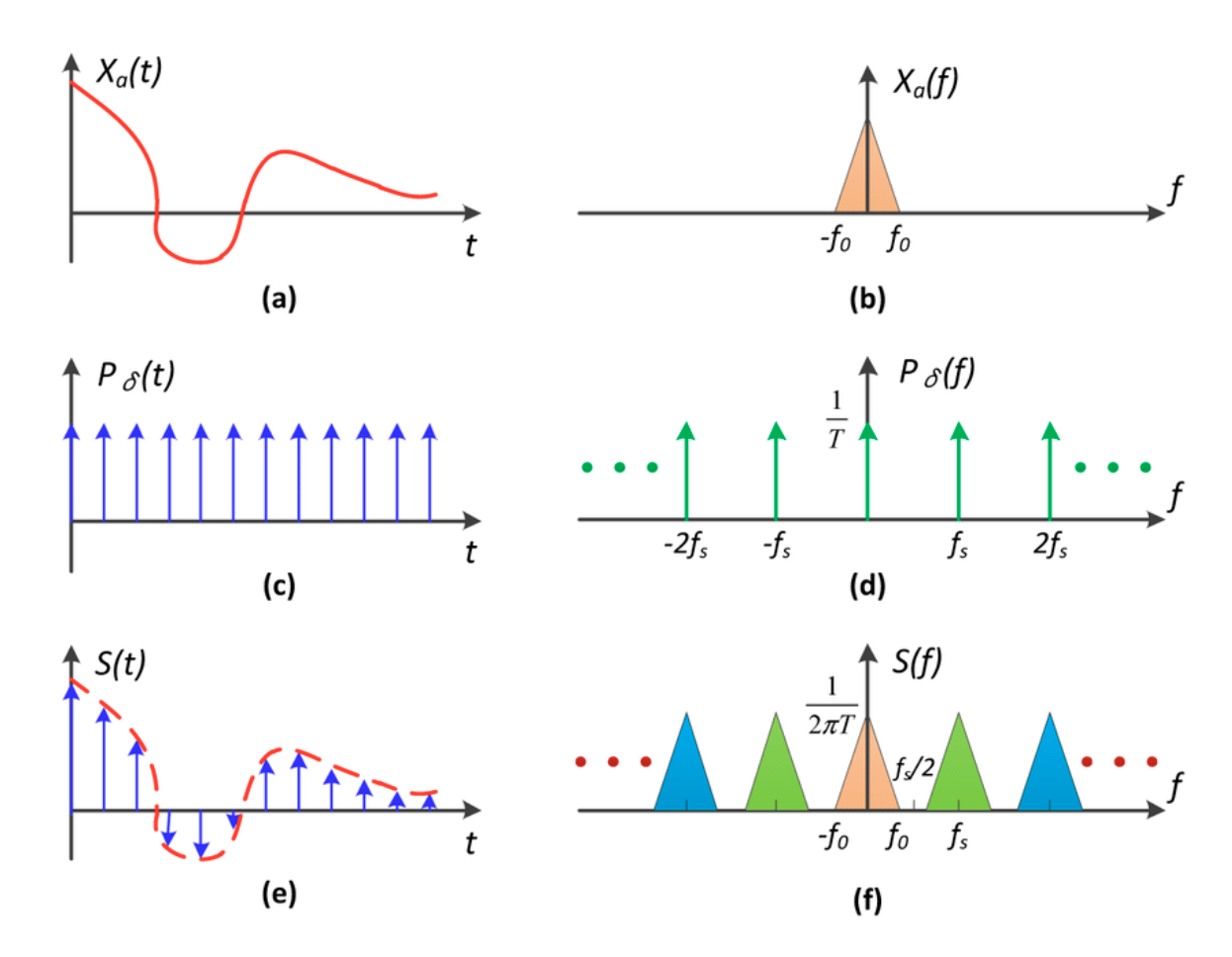
- (b) 图是 (a) 图傅里叶变换后的结果
- 要将 (a) 图上的连续函数变成一系列离散的点(采样
) ,就需要将这个函数和另一个函数((c) 图)相乘,而这另一个函数仅在某些位置上有值,其他地方均为 0。我们称这样的函数为冲激函数 - 冲激函数经过傅里叶变换后会变成另一种冲激函数((d) 图)
- 空间域上的乘积 = 频域上的卷积,所以 (b) 和 (d) 卷积的结果如 (f) 图所示,发现采样做的事就是拷贝多份原函数的频谱
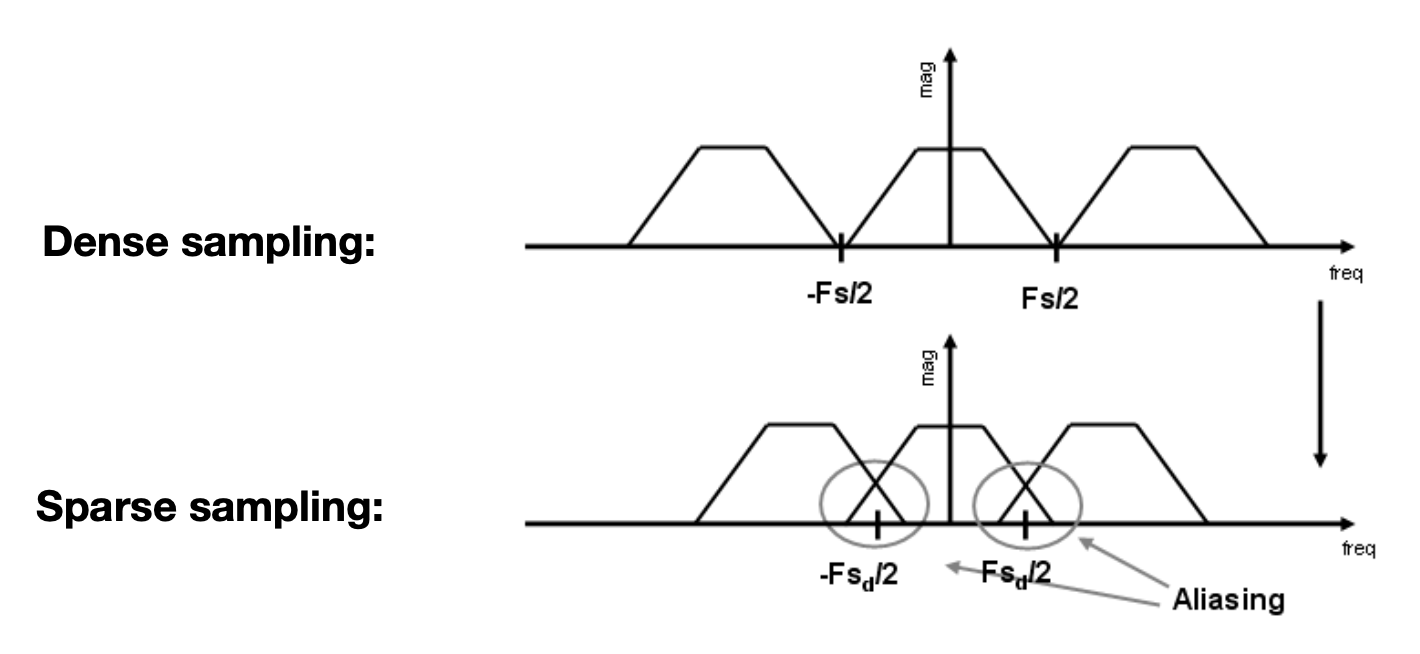
不同的采样率会影响这些重复频谱之间的间隔:采样越快,这些频谱的间隔越大(频率大),反之就越小,频谱就有可能重叠在一起。这种混叠正是走样产生的原因。
Solutions⚓︎
综上,我们可以总结出以下减少走样瑕疵的路径:
- 增加采样率
- 从而增大重复频谱在频域上的间隔
- 具体做法:采用分辨率更大的显示器、传感器或帧缓冲区 ...
- 但这种方法成本高昂,且有可能需要很高的分辨率,受物理性质限制
- 反走样
- 在重复生成频谱前,让频谱变窄
- 即在采样前先滤去高频内容
Antialiasing in Practice⚓︎
反走样 = 先限制,再重复
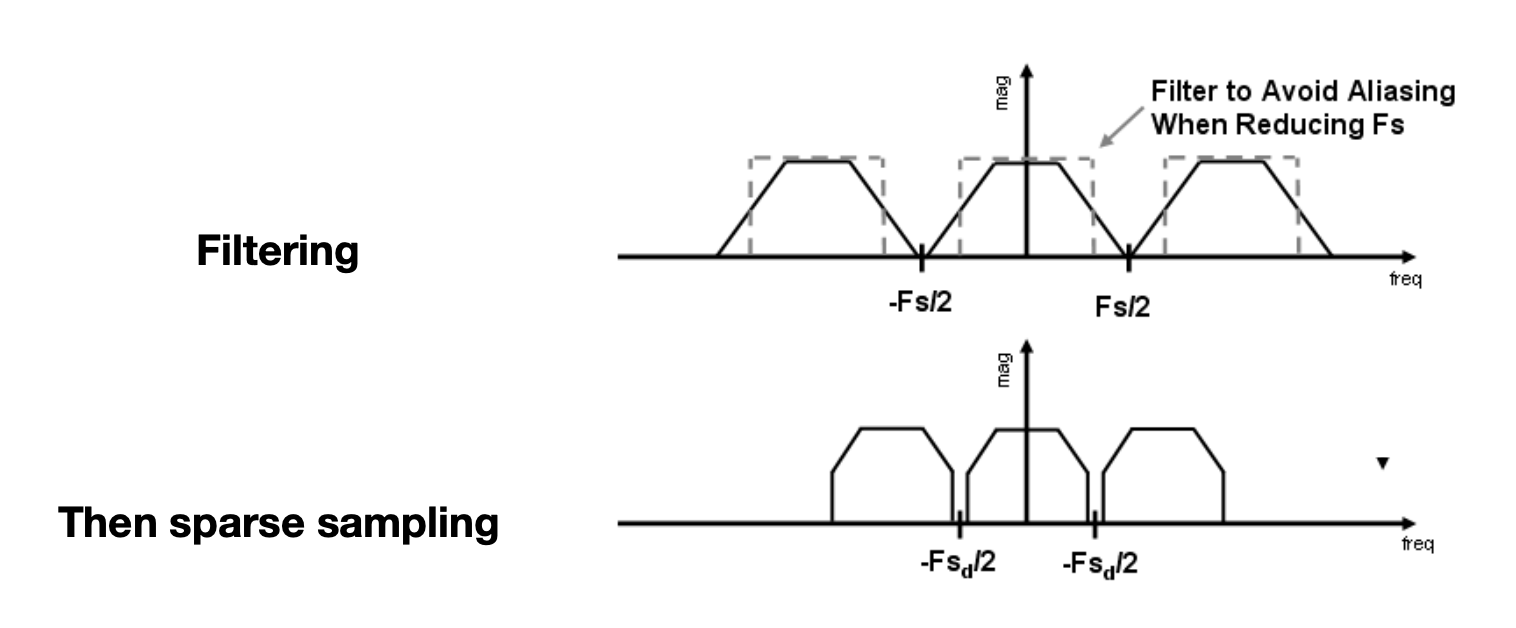
反走样的具体实现如下:
- 通过单像素框模糊,对 f(x, y) 做卷积
- 然后在每个像素的中心上采样
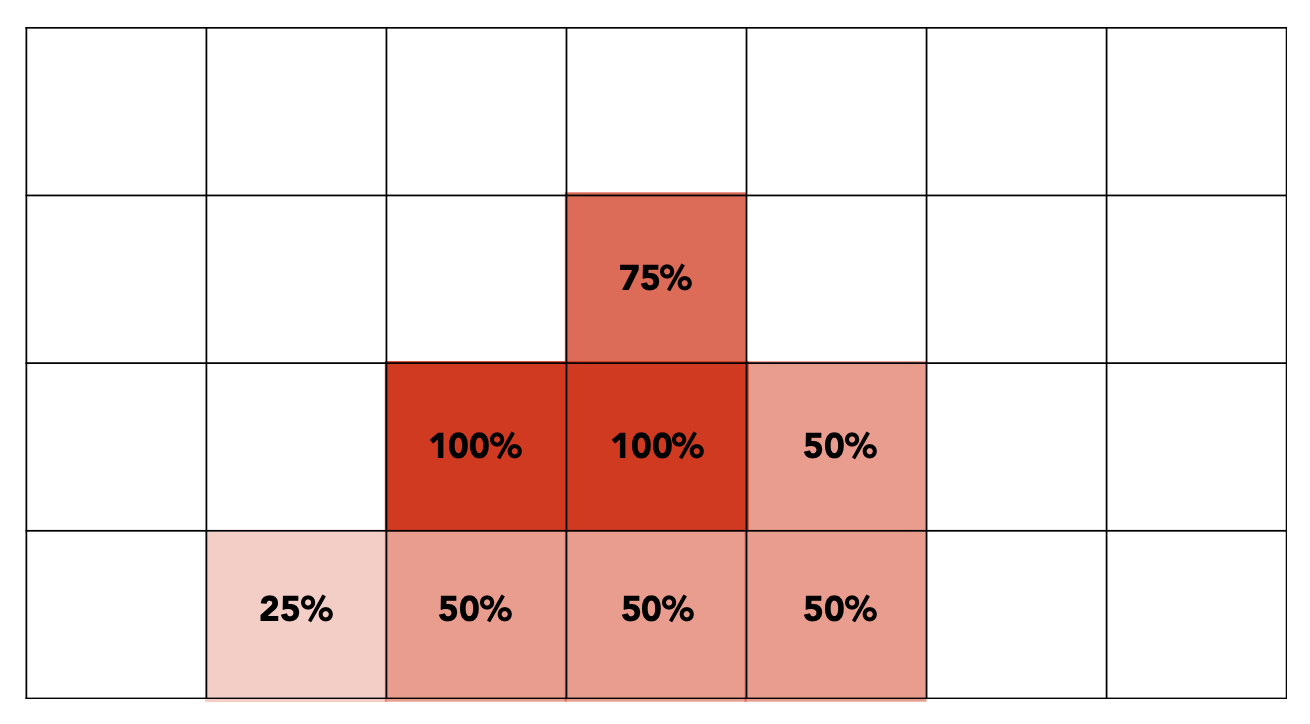
在光栅化一个三角形时,一个像素面积内的 f(x, y) 的平均值 = inside(triangle, x, y)(三角形覆盖的像素面积
MSAA⚓︎
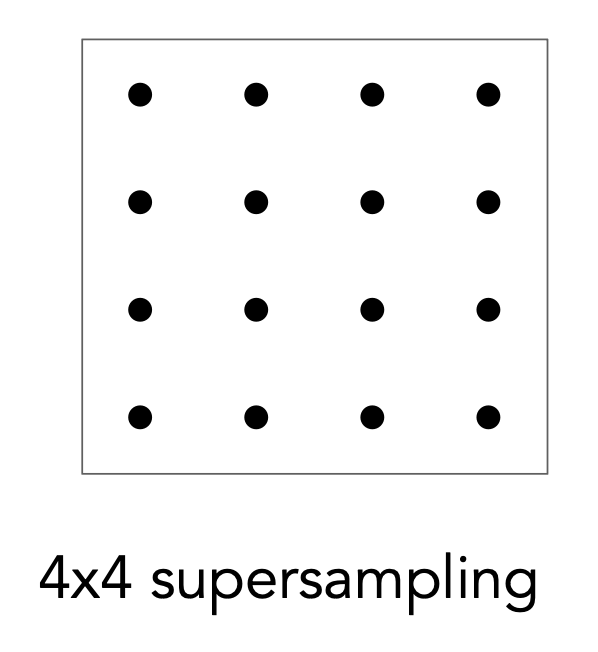
如果要对被三角形覆盖的每个像素求平均值,那么计算量太大了。所以人们想到了一种近似方法,叫做多重采样反走样(multisample antialiasing),它用更多的采样点实现反走样(所以又称超采样(supersampling)
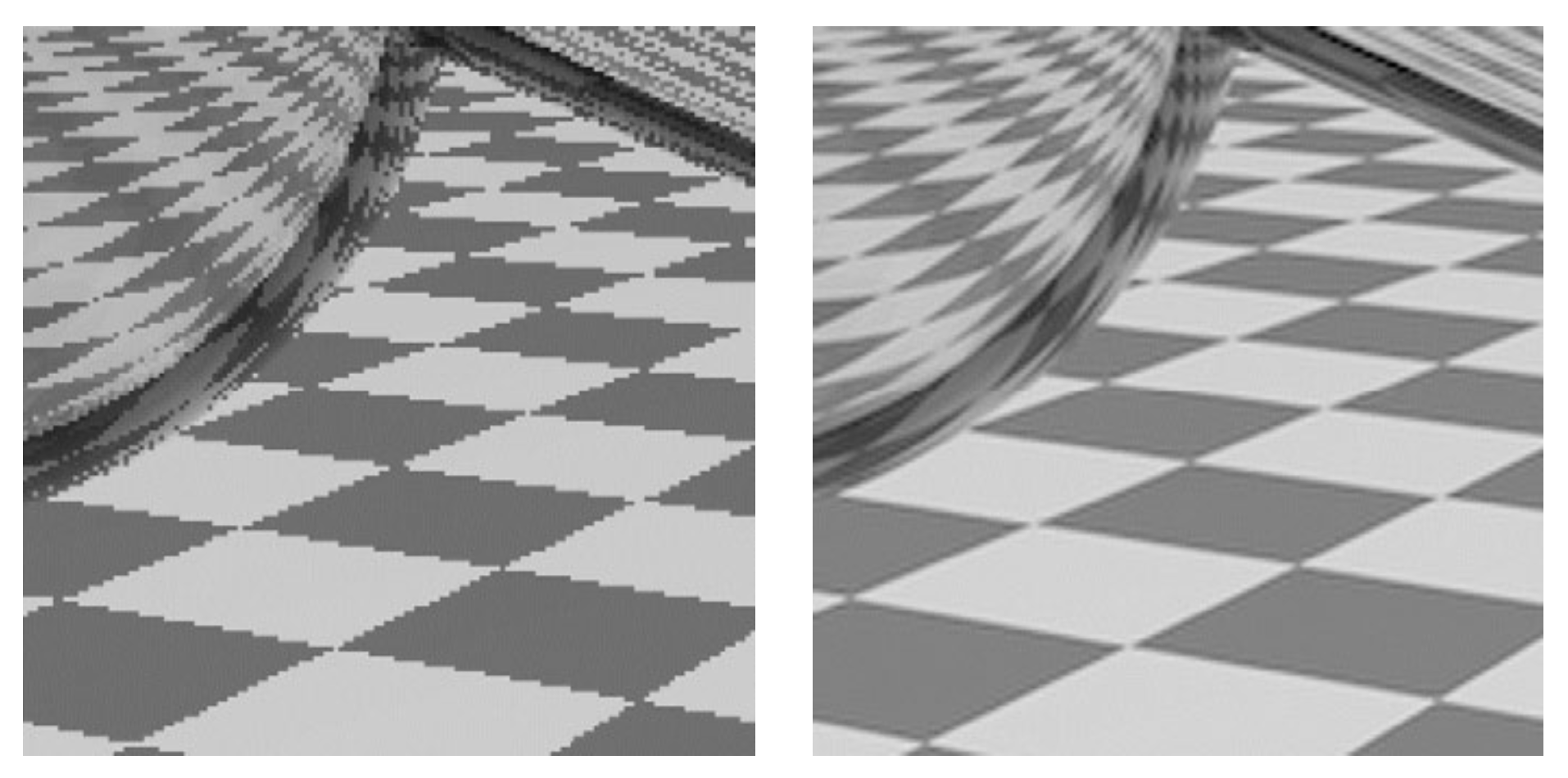
例子
这是在使用最基础的点采样(每个像素仅采样一次)的结果。
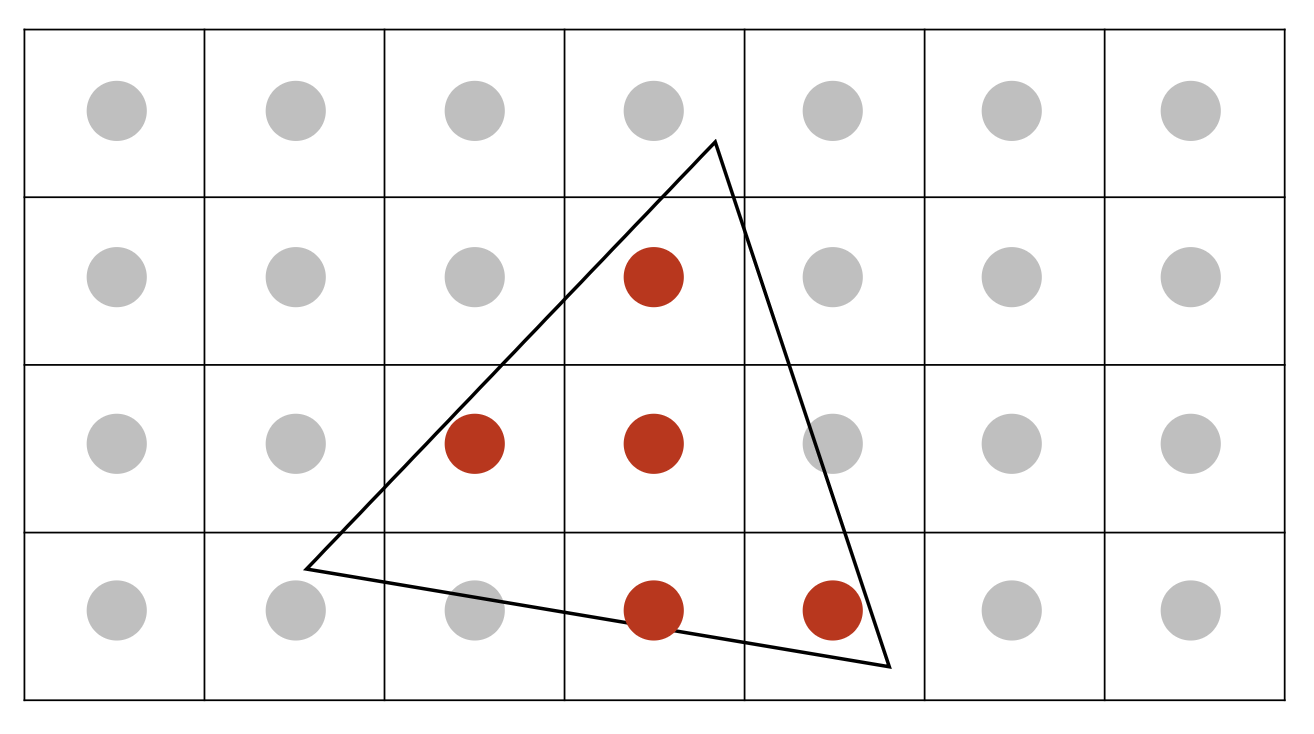
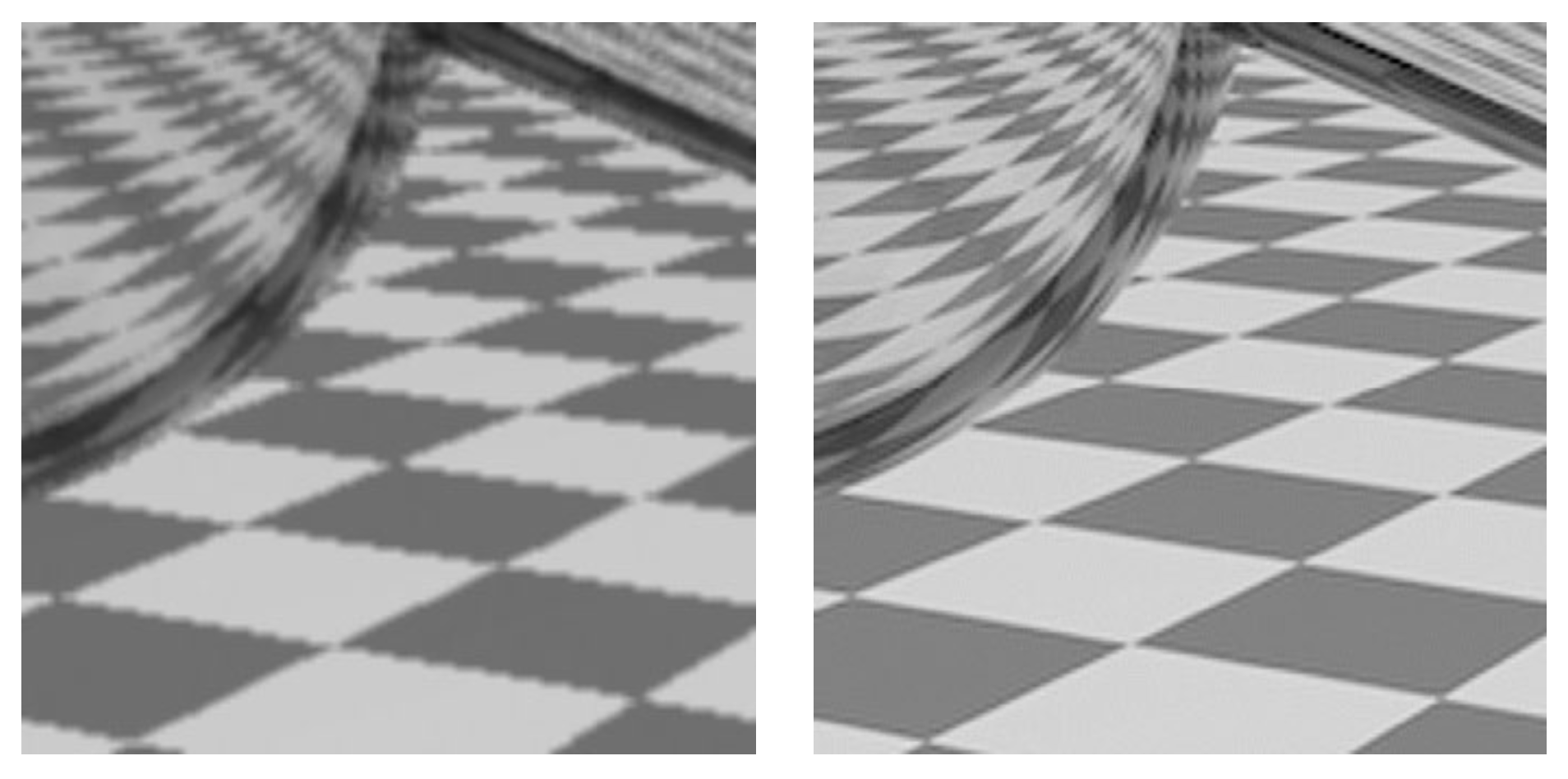
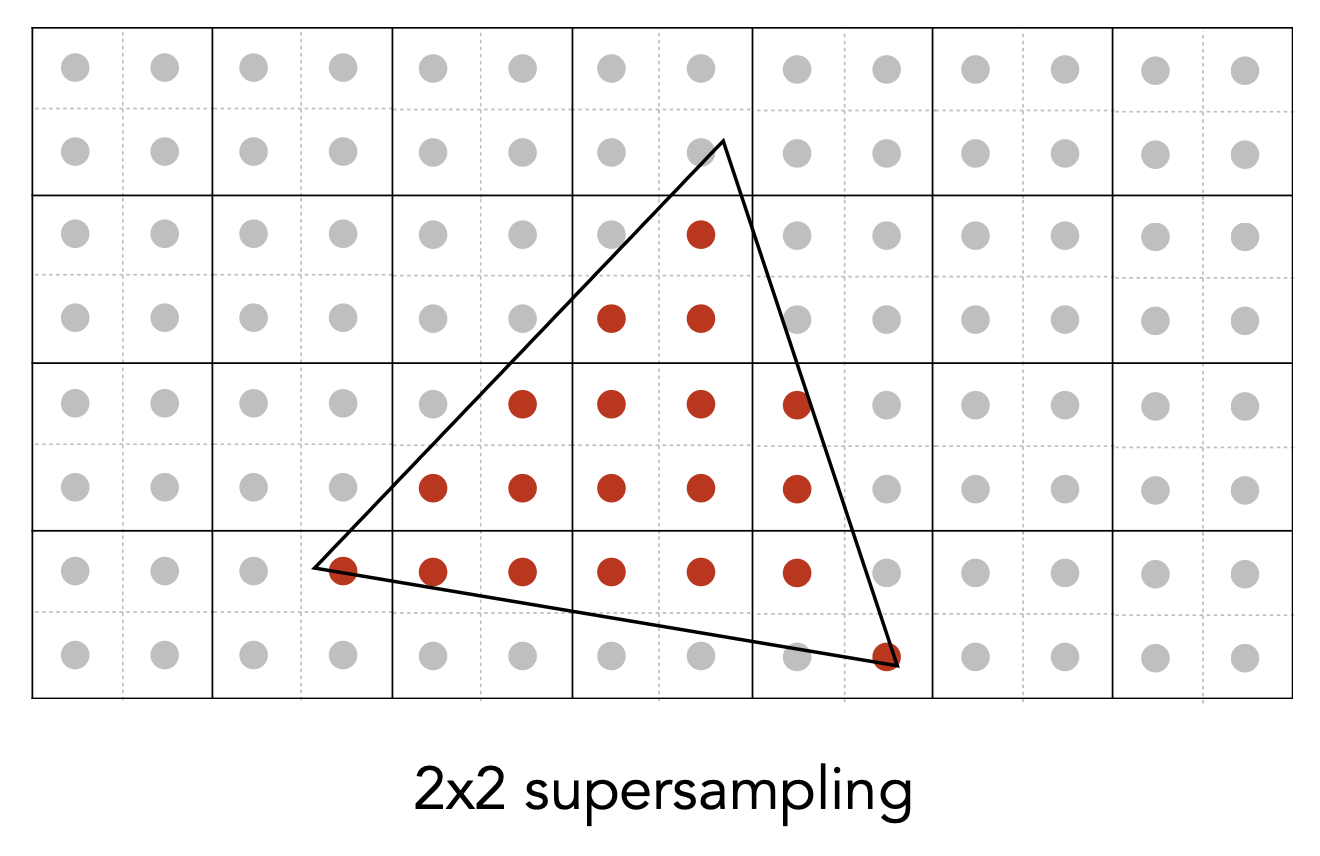
现在我们要使用超采样。第一步是将每个像素进行 NxN(这里是 2x2)的采样。
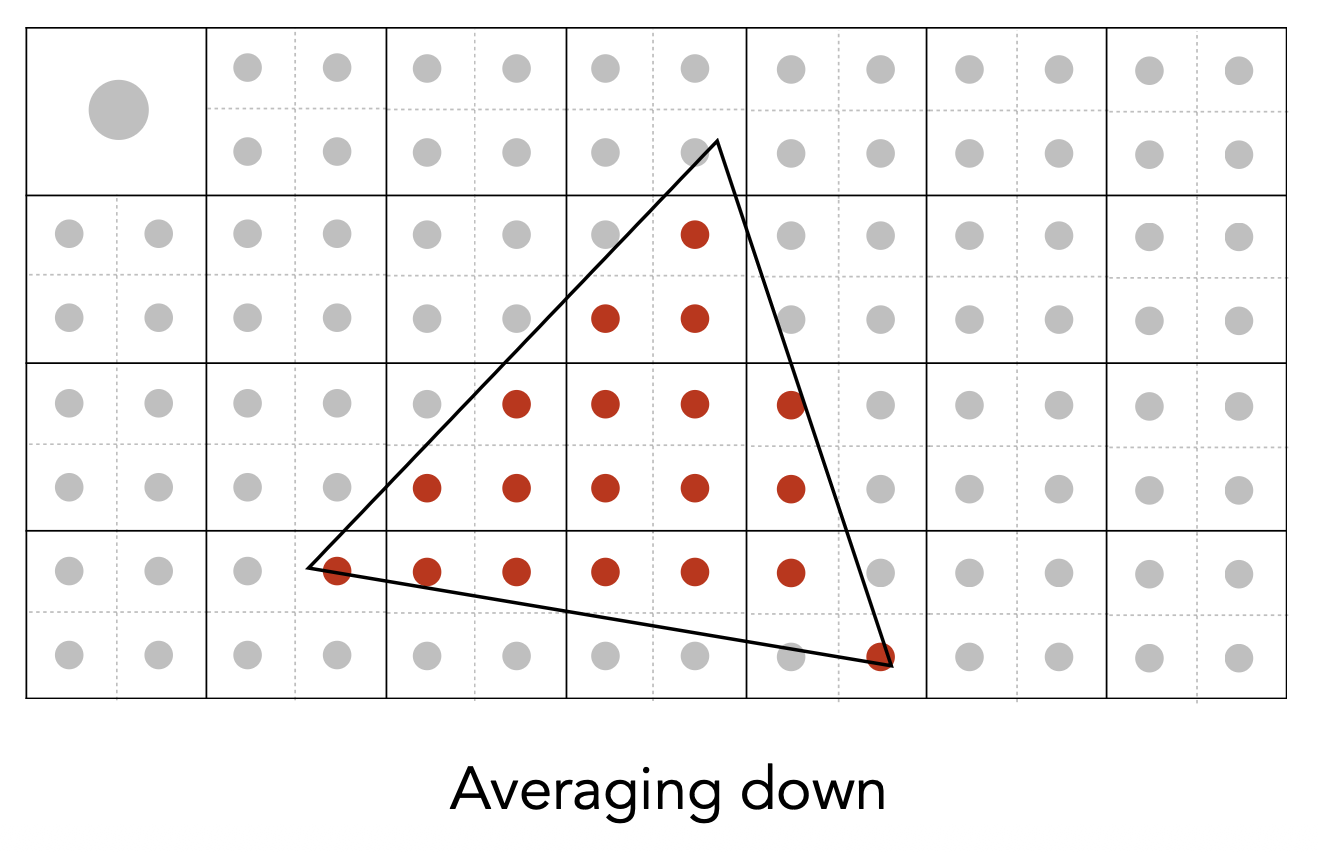
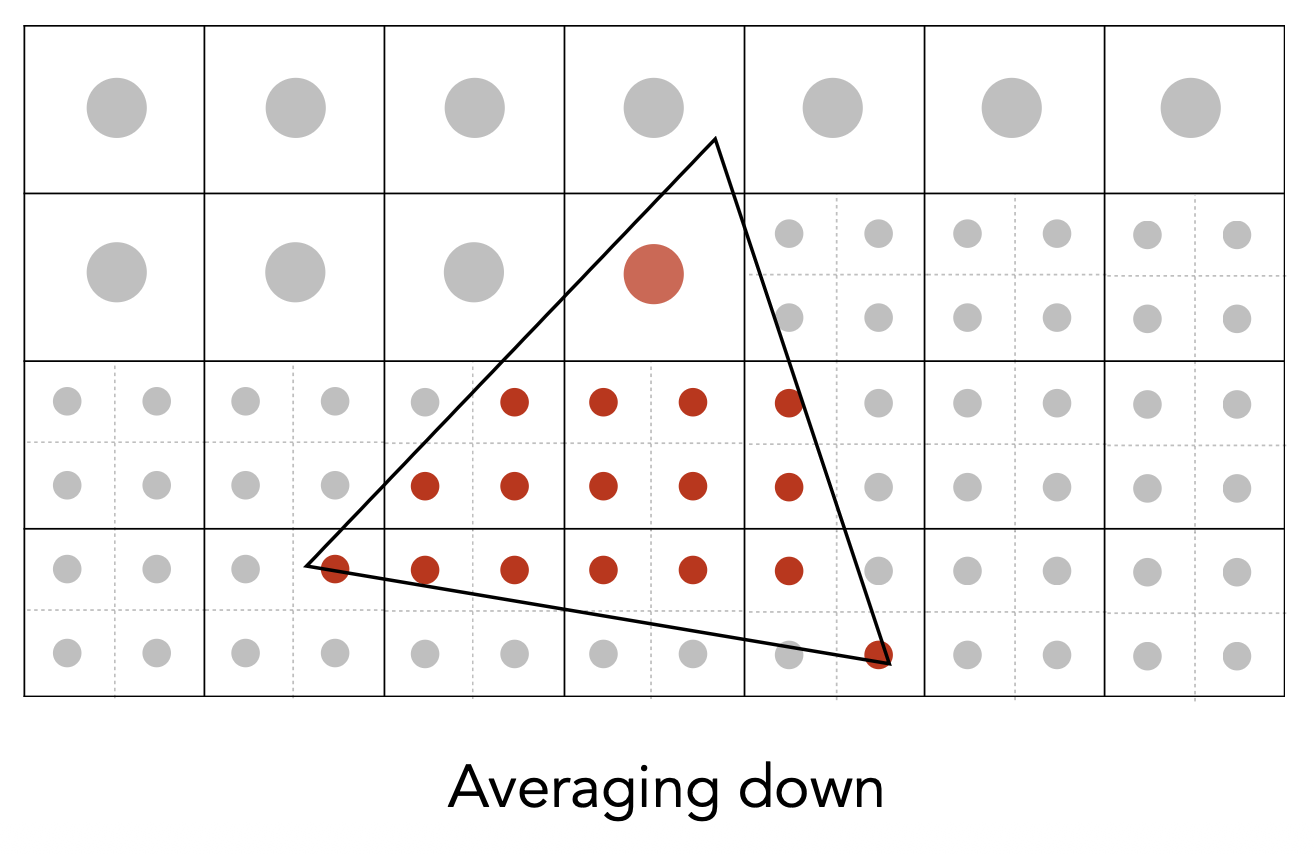
第二步是计算在每个像素“内”的 NxN 采样的平均值。
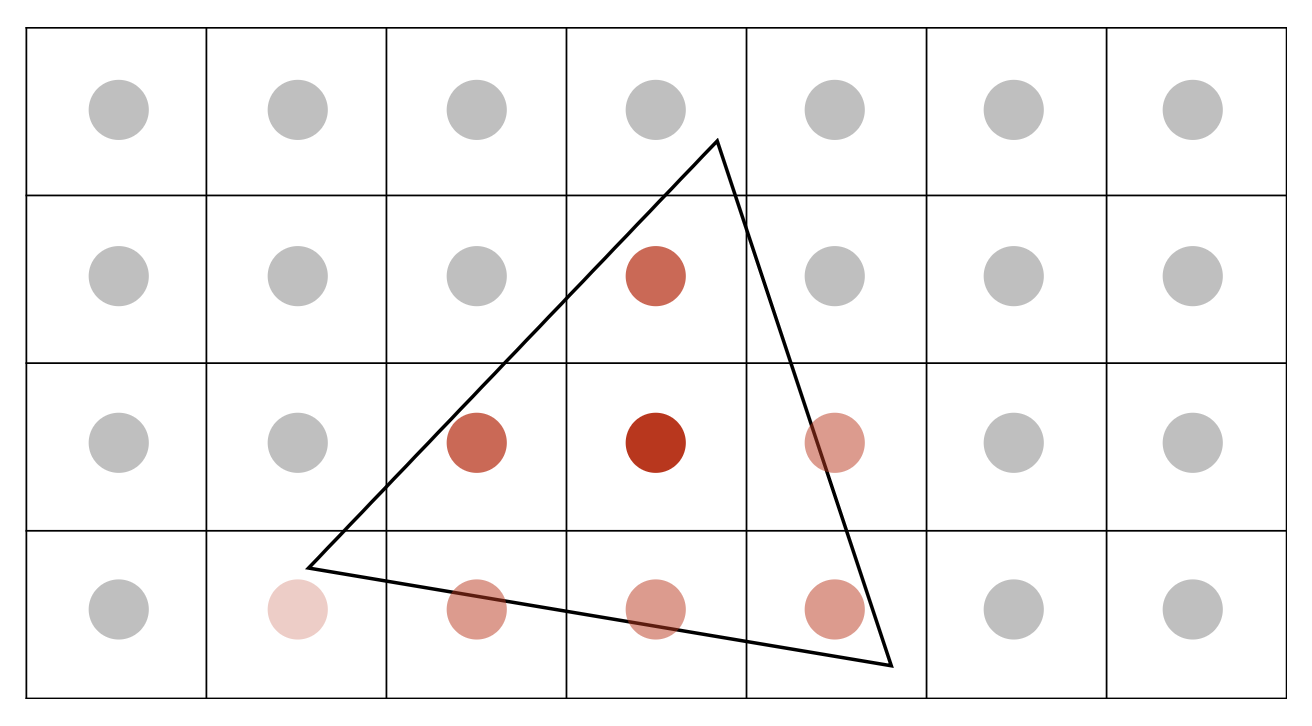
这是最终呈现在显示器上的信号。
Antialiasing Today⚓︎
使用 MSAA 的代价就是增大了计算量,比如将一个像素划分为 4x4 的小格,就会增加 16 倍的计算量。
下面介绍一些在工业界得到广泛应用的反走样算法:
- FXAA(快速近似反走样 (fast approximate antialiasing):找出锯齿(图像匹配
) ,换成无锯齿的边界,和采样无关 - TAA(时间反走样 (temporal antialiasing)
) :复用上一帧的感知结果,将上一帧的像素值应用在当前帧上
还有一个经常和反走样放在一起,和反走样不太一样但概念十分相似的东西,叫做超分辨率(super resolution),它要做的是将低分辨率的图变成高分辨率,这中间也存在采样率不足的问题。一种常见的解决方案是 DLSS(深度学习超采样 (deep learning super sampling)
Visibility / Occlusion⚓︎
通过前面的学习,我们知道如何将一个三角形画在屏幕上。现在考虑多个三角形,它们相对相机的距离不同,那么怎么把它们画在屏幕上,并且做到近的三角形遮挡远的三角形。
Painter's Algorithm⚓︎
第一种算法的灵感来自绘制油画的画家。他们一般会先画远处的风景,再画近处的物体,这些物体会覆盖远景。所以这个算法叫做画家算法(painter's algorithm):从后往前绘制图形,近的图形会覆写(overwrite) 帧缓冲区原有的内容。
不过这个简单的算法存在以下问题:
- 需要先对三角形按深度排序(若有 \(n\) 个三角形,复杂度为 \(O(n \log n)\))
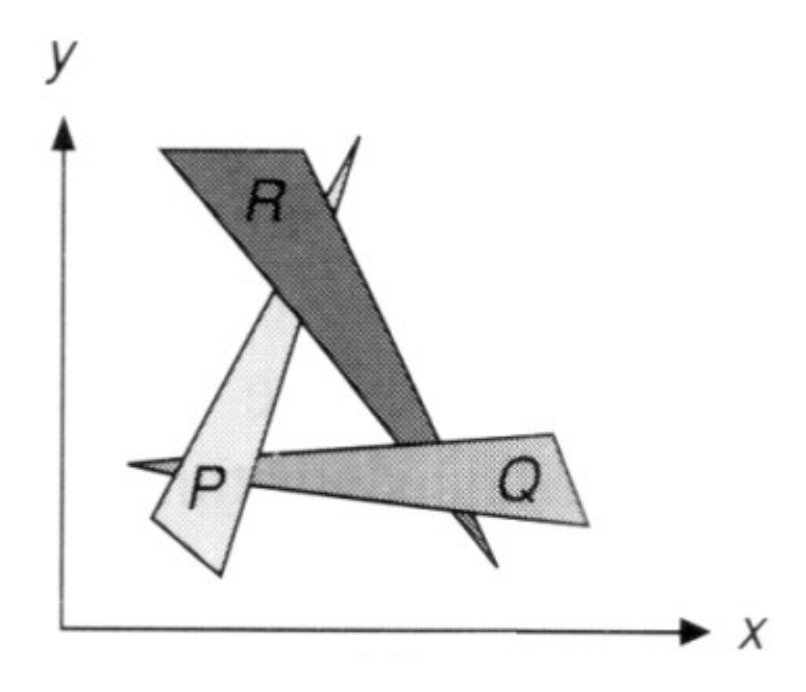
-
存在无法通过深度排序的三角形,如下图所示的三个互相重叠的三角形
Z-Buffer⚓︎
所以接下来介绍 CG 中常用的一种算法,叫做深度缓存(deep buffer / z-buffer)。它的思想是:
- 对于每个像素,存储当前最小的深度(z 坐标值)
- 需要用一个额外的缓冲区存储深度值
- 原有的帧缓存存储像素的颜色值
- 深度缓存存储像素的深度值
注
为简洁起见,我们假设 z 值始终为正,且 z 越小表示离相机越近,越大表示离相机越远。
例子
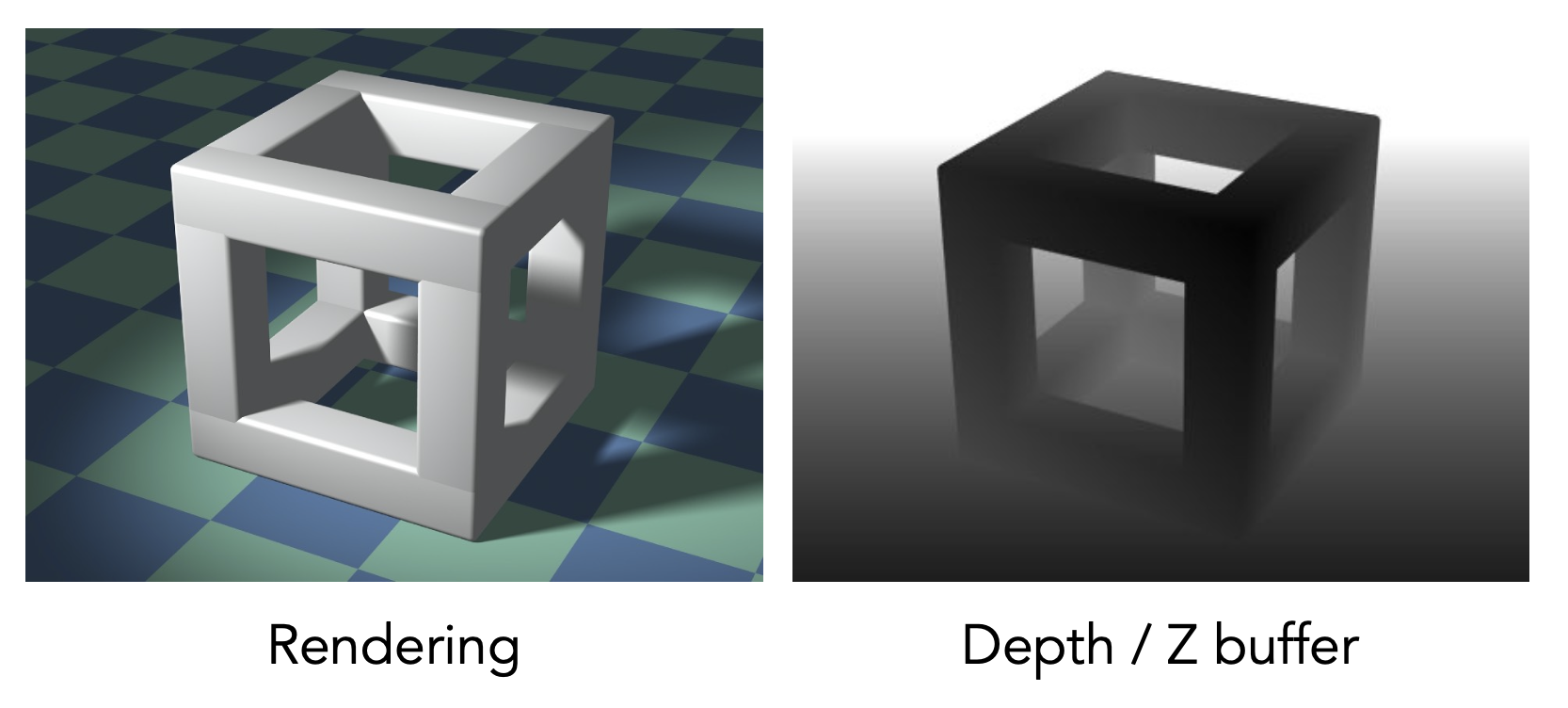
右图表示深度缓存中每个像素的深度值,可以看到越近的地方颜色越黑,表示值越小。
下面给出深度缓存算法的伪代码:
Initialize depth buffer to infinity
// During rasterization:
for (each triangle T)
for (each sample (x, y, z) in T)
if (z < zbuffer[x, y]) // closest sample so far
framebuffer[x, y] = rgb; // update color
zbuffer[x, y] = z; // update depth
else
; // do nothing, this sample is occlusded
例子
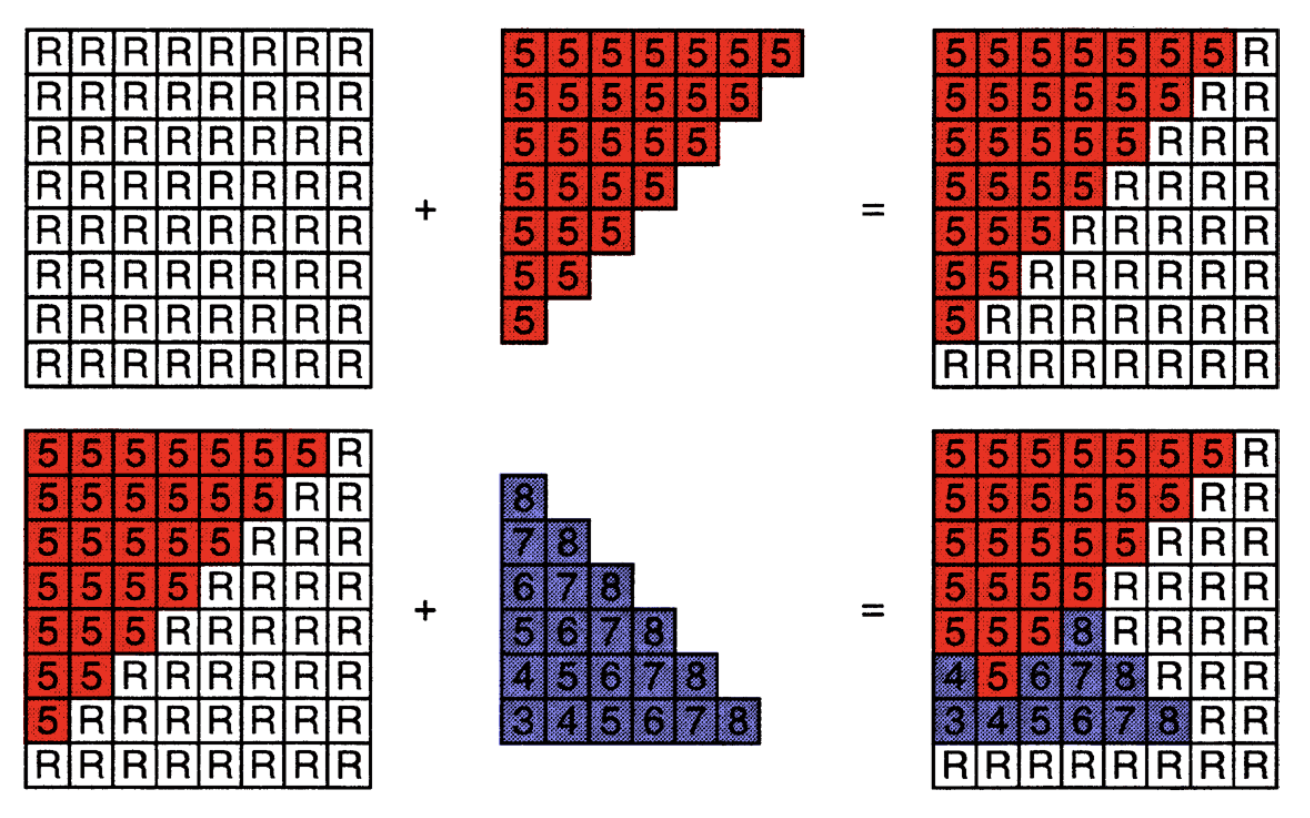
- 原图(左上角)每个像素的深度值假设是无穷大的
- 红色三角形的每个像素的深度值均为 5,都比初始图像小,因此能够完全覆盖原图(右上角)
- 现在又引入一个蓝色三角形,它的部分像素深度值比 5 大(远
) ,部分比 5 小(近) ,这些深度值小的像素点就能覆盖原来红色三角形所在的像素,剩下的会被红色三角形遮挡
深度缓存算法的复杂度:
- 若有 \(n\) 个三角形,复杂度为 \(O(n)\)(假设每个三角形覆盖常数个像素)
- 之所以是线性时间,是因为深度缓存只记录当前像素点最小的深度值,不需要为所有的深度值做排序
- 即便三角形的绘制顺序不同,也不影响使用该算法得到的最终结果
- 因此它是 CG 中最重要的可见性 (visibility) 算法之一,几乎在所有的 GPU 上都得到实现
- 可结合 MSAA 使用(见作业 2)
- 缺点:处理不了透明物体
总结前两讲学过的内容
评论区