Chap 3: Arithmetic for Computer⚓︎
约 8789 个字 19 行代码 预计阅读时间 44 分钟
核心知识
- ALU
- 基本功能、RISC-V 指令的电路实现
- 行波加法器 vs 超前进位加法器
- 乘法
- 各个版本下的乘法器及其执行流程
- 符号数乘法
- 并行乘法计算
- 除法
- 各个版本下的除法器及其执行流程
- 浮点数
- IEEE 754 标准:浮点数的表示(符号位、指数、尾数
) 、单精度 / 双精度、有效位数、偏移码 ... - 浮点数加法(需要掌握
) 、浮点数乘法(大致了解即可)
- IEEE 754 标准:浮点数的表示(符号位、指数、尾数
个人感觉这章内容实际上是数逻组合逻辑电路部分的 pro 版。
Overflow⚓︎
在加法或减法的运算中,溢出(overflow) 是我们常常会遇到的问题。下面总结一下(符号数的)溢出会 / 不会出现的情况:
- 加法
- 不会溢出:两个符号不同的操作数相加
- 可能会溢出:两个正数 / 两个负数的相加
- 减法
- 不会溢出:两个符号相同的操作数相减
- 可能会溢出:正数 - 负数 -> 负数? 负数 - 正数 -> 正数?
溢出情况的表格总结:
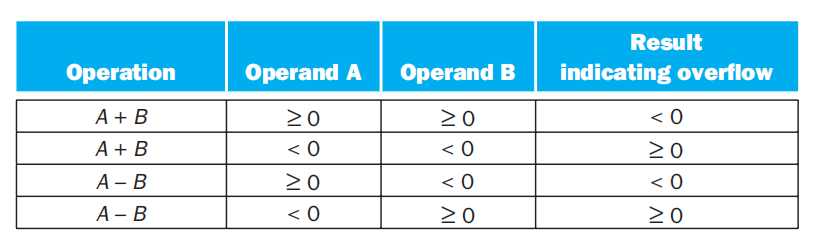
- 对于无符号数,我们会将“溢出”看作进位(carry) 或借位(borrow),因此计算机会将其视为一般情况而不做特殊处理
- 对于符号数,计算机提供了以下应对溢出的处理方式:
- ALU 检测到溢出问题
- 处理器会抛出异常 (exception) 或中断 (interrupt),将指令地址保存在特定的寄存器 EPC 上
- 跳转到操作系统的特定例程:纠正程序、返回错误代码、或者中止程序
例题
下列 8 位补码加法运算中,哪一个运算是既有溢出也有进位的?
A. 0x12 + 0x34 B. 0x12 + 0xEF C. 0x80 + 0x80 D. 0x12 + 0x78
C
分析:
- A: 0x12 + 0x34 = 0x46,既没溢出也没进位
- B: 0x12 + 0xEF = 0x01,既没溢出也没进位
- C: 0x80 + 0x80 = 0x00,既有溢出也有进位
- D: 0x12 + 0x78 = 0x8A,有溢出但没进位
具体的加减法由 ALU 来实现,下面我们将会从零开始搭建 ALU~
Constructing a Basic ALU⚓︎
算术逻辑单元(arithmetic logic unit, ALU) 用于执行各种类型的算术(加、减等)和逻辑(与、或等)运算。由于 RISC-V 寄存器是 64 位宽的,因此我们需要设计 64 位宽的 ALU。对于初学 ALU 的各位,先从学习 1 位的 ALU 的搭建开始吧!
A 1-Bit ALU⚓︎
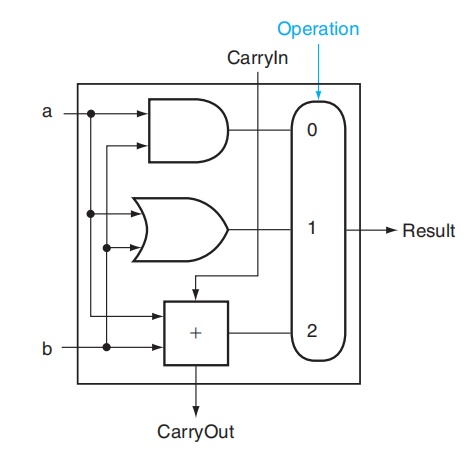
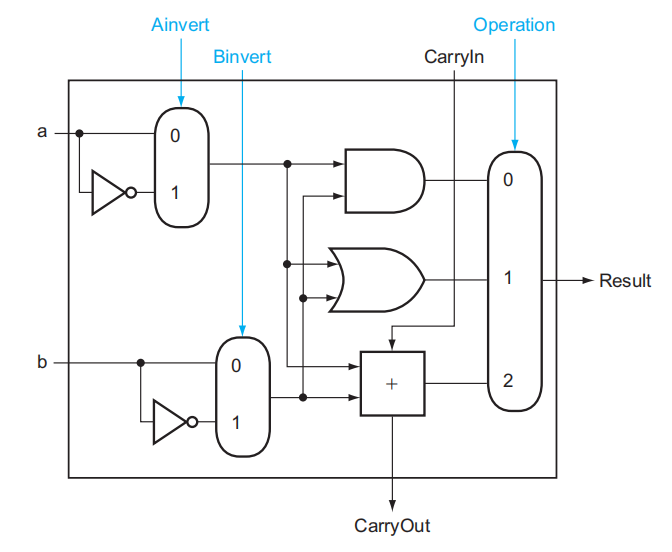
我们希望这个 1 位的 ALU 能够实现:
-
AND、OR 运算 -> 1 个与门和 1 个或门就可以搞定了

注:中间这个圆角矩形代表多路选择器,Operation 表示选择输入
-
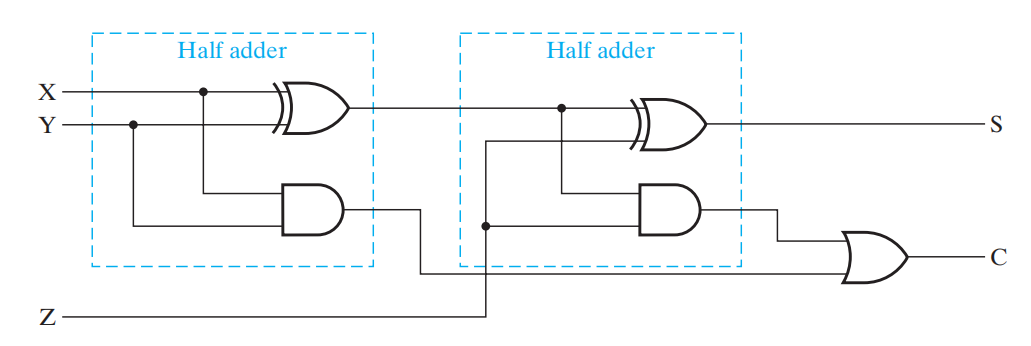
加法运算 -> 全加器
实现细节(图片摘自数逻笔记)
-
还要一个多路选择器 (multiplexor)(在第一张图展示出来了
) ,用于挑选其中一种运算
将它们组装起来,我们就可以得到一个最基本的 1 位 ALU 了!
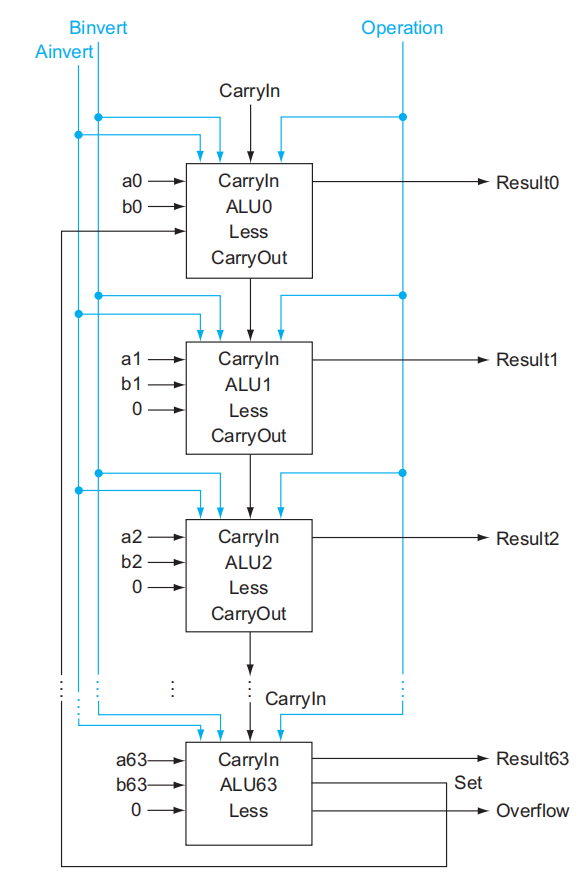
A 64-Bit ALU⚓︎
现在我们手边有了 1 位的 ALU,要想构建一个 64 位的 ALU,很自然的想法是:将这些 1 位 ALU(可看作黑箱,此时我们并不需关心底层的实现细节)一个个串连起来,此时每个 ALU 的进位出 (CarryOut) 和下一个 ALU 的进位入 (CarryIn) 相连。这样的话,单个的进位就会从最低位一直传到最高位,因此我们把这种加法器称为行波加法器(ripple carry adder),最终效果如下图所示:

正如数逻提到过的,这是一种迭代电路(iterative circuit)
在这个 ALU 的基础上,我们还可以添加更多的功能:
(1)实现减法操作
上过数逻课程的小伙伴们想必已经知道:
- 减去一个正数 = 加上对应负数的补码
- 负数的补码 = 它的反码 + 1
- 负数的反码 = 原码按位取反
所以只需要在原来 ALU 的基础上做一些小小的改变,我们便能实现减法操作了:
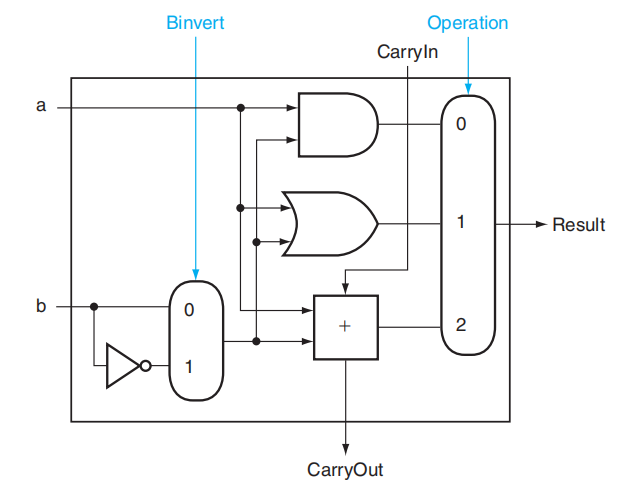
可以看到,这里给输入 B 加了一个非门和一个 MUX,并且新增一个输入Binvert,用于决定 B 是否应该按位取反(得到 B 的反码
(2)实现或非 (NOR)运算。
由德摩根定律,\(\overline{a + b} = \overline{a} \cdot \overline{b}\),所以只要让输入 a 像输入 b 一样能够选择取反,并配合与运算,就可以实现或非运算了:
Tailoring the 64-Bit ALU to RISC-V⚓︎
对于一个 RISC-V 架构下的 ALU 而言,这样的设计还不够完善,因为还缺少一些常用指令的实现——接下来将补充 set less than( slt ) 指令和 branch if equal( beq ) 指令。
先来看slt指令:slt rd, rs1, rs2。它的功能是比较寄存器rs1和rs2的大小,若rs1 < rs2则rd = 1,否则rd = 0。为了增加这个功能,
- 首先得扩充 MUX 的输入脚,让它接受第 4 种指令的输入
- 然后,我们引入一个输入脚
Less,让它直接与 MUX 的第 4 个输入脚相连,它的值便代表slt指令的返回值
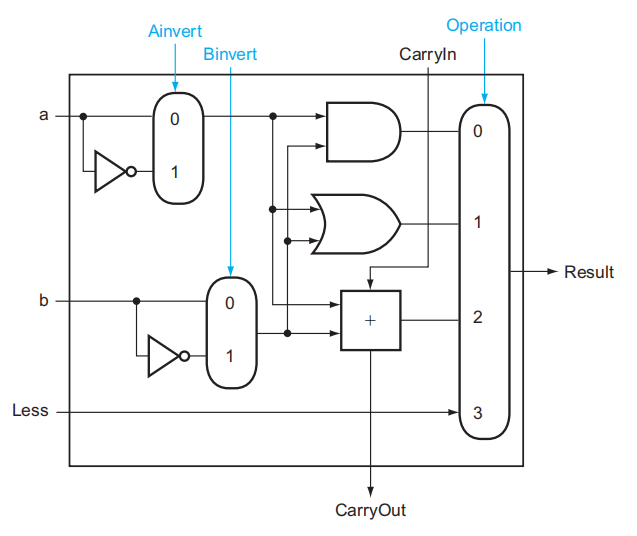
- 对于一个 64 位的 ALU,我们只需要用到 1 个 Less 输入即可,因此除了第一位上的 Less,让其余位对应的 Less 的值均为 0
- 那么
Less的值从何而来呢?我们将a < b的比较运算转化为a - b < 0的减法运算(减法运算已设计在 ALU 内) ,然后将减法结果的符号位传给Less就 OK 了,因为符号位的值正好对应slt指令的返回值 - 符号位产生于最高位的 ALU,所以从最高位 ALU 中加法器的进位输出端口引出一条线
Set,将它连接到最低位 ALU 的Less输入脚。下图展示的是最高位的 ALU:
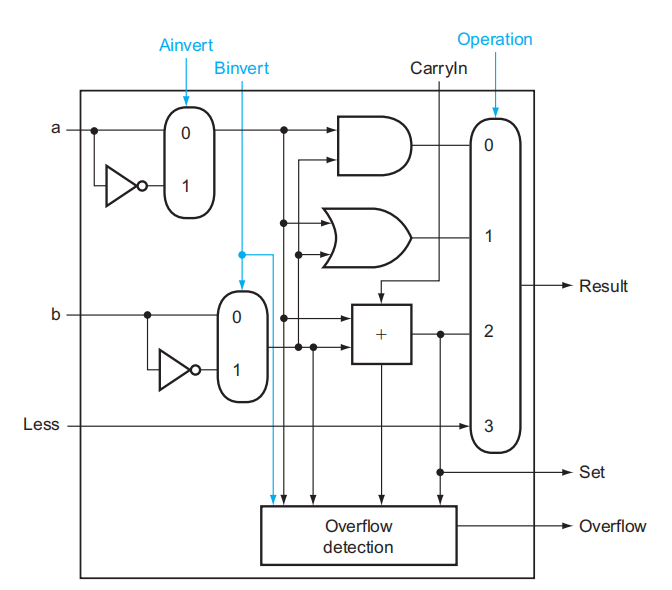
- 为了处理溢出问题,还在最高位的 ALU 内专门添加一个溢出侦测(overflow detection) 装置
- 最终的实现效果:
再来看beq指令,它的功能是当两个寄存器的值相等时则跳转。ALU 的实现步骤如下:
- 这里同样对两个数做减法来进行比较:两个数相减结果为 0,表示两个数相等
- 最简单粗暴的方法是用一个很大的或非门,获取每一位上 ALU 的减法结果,若这个或非门的输出结果为 1,表明减法的结果为 0,即两个数相等
- 也许各位读者早就发现:
Binvert的值和CarryIn的值始终是一致的。所以可以将这两个输入并在一起,叫做Bnegate
最终版本的 64 位 ALU 逻辑电路图如下:
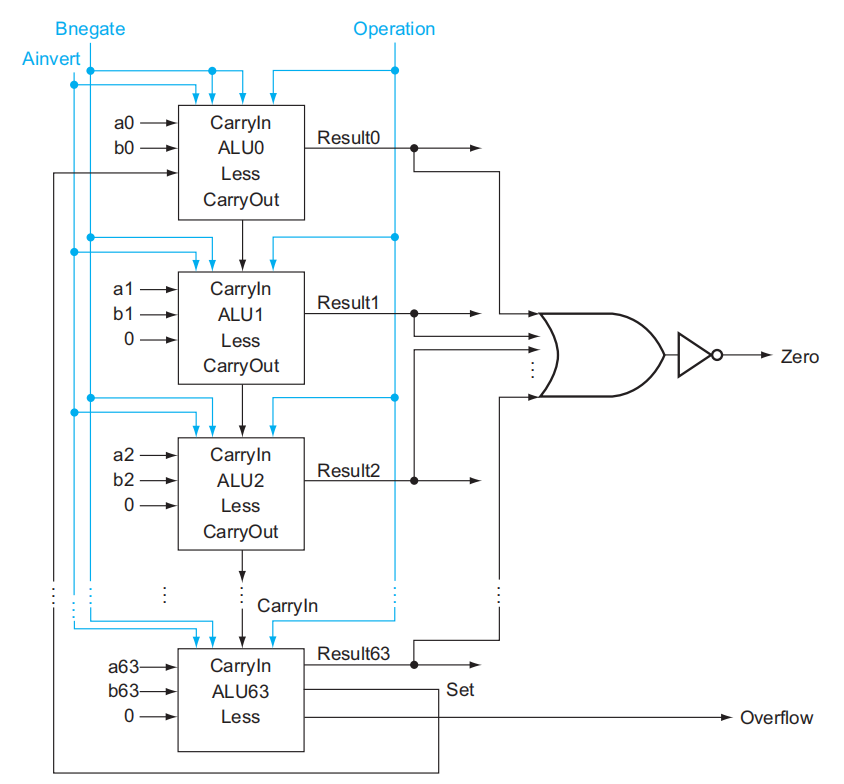
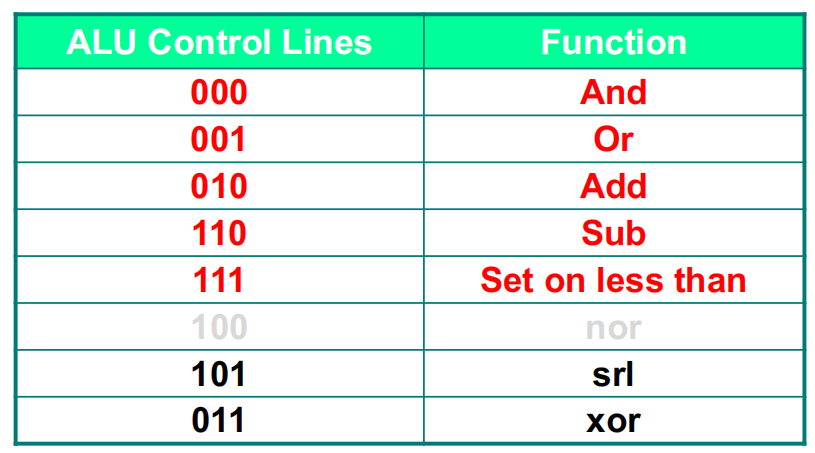
对应 ALU 的功能表:

为了简化电路的描绘,一般会用下面这个符号代表 ALU:

Verilog 代码实现
module RISCVALU(ALUctl, A, B, ALUOut, Zero);
input [3:0] ALUctl;
input [63:0] A, B;
output reg [63:0] ALUOut;
output Zero;
assign Zero = (ALUOut == 0);
always @(*) begin
case (ALUctl)
0: ALUOut <= A & B;
1: ALUOut <= A | B;
2: ALUOut <= A + B;
6: ALUOut <= A - B;
7: ALUOut <= A < B ? 1 : 0;
12: ALUOut <= ~(A | B);
default: ALUOut <= 0;
endcase
end
endmodule
来自课件的 ALU plus
这个 ALU 添加了更多的算术逻辑运算,但本质上还是一样的。

对应的功能表:
补充说明
是不是忘了移位运算?实际上,在硬件设计中,移位的功能往往放在 ALU 外面的「桶式移位器」中,实现 1-63 位的移位运算所花时间与加法运算差不多。
Fast Addition: Carry Lookahead⚓︎
注意
下面讲到的“进位”一般指的都是 CarryIn。
64 位 ALU 的加法器(行波加法器)是通过 64 个 1 位 ALU 内的加法器串联而成的,因此加法的执行速度非常地慢——拿最高位的 ALU 来说,它的加法运算要从最低位的运算开始一直等待,直到前 63 位运算产生的进位传到最高位的 ALU 内。
所以,提升加法速度的关键在于:让高位进位更快地传到高位加法器内。下面将介绍一种将速度 \(O(N)\) 提升到 \(O(\log N)\) 的加法器:超前进位加法器(carry lookahead adder)。
简单粗暴的实现方法
我们将当前位上的加法器的进位计算公式全部展开,尝试仅用 ALU 的两个操作数的前面几位,以及来自外部的进位(最低位的进位)表示该位产生的进位。因为这些量都是已知的,且不受前面加法器的影响,因此只需要 \(O(1)\) 的时间,加法器就能几乎在同一时间完成所有位上的加法运算。
下面我们用 \(a_i\) 和 \(b_i\) 表示第 \(i(i \ge 0)\) 位(最低位为第 0 位)的两个操作数,\(c_i\) 表示来自第 \(i-1\) 位,传入第 \(i\) 位的进位。
可以看到,第 2 位的进位展开式就已经相当复杂了,更何况更高位的进位呢?所以设计这样的电路开销太大了,是不可行的!
超前进位加法器的实现借助多层抽象的概念。我们先来分析第一层的抽象:
第 \(i+1\) 位的进位有以下递推公式:
将这个公式用于第 2 位的进位,得到:
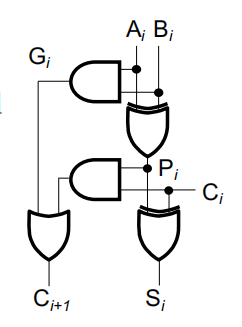
不难看到,有很多类似 \((a_i \cdot b_i)\) 和 \((a_i + b_i)\) 的项出现在公式内,它们分别被称为生成项 (generate)\(g_i\) 和传播项 (propagate)\(p_i\)。因此进位公式还可以表示成以下形式:
- 当 \(g_i = 1\) 时,\(c_{i+1} = 1\),就好像 \(g_i\)“产生”了一个进位,因此称 \(g_i\) 为生成项
- 而如果 \(g_i = 0, p_i = 1\),\(c_{i+1} = c_i\),就好像 \(p_i\)“传递”前一位的进位给当前的进位,因此称 \(p_i\) 为传播项
对应的逻辑电路图:
将这一公式用于 4 位的加法进位上:
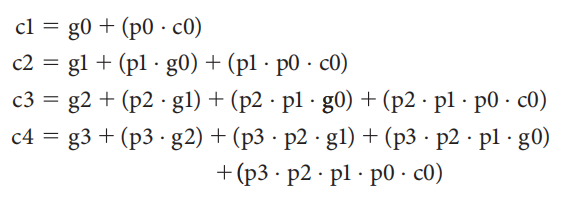
从上面的式子中,我们可以总结出:对于当前位而言,如果生成项为 1,或者前面的位上存在值为 1 的生成项且该生成项所在位到当前位之间的所有传播项均为 1 时,当前位的进位值为 1,否则为 0。
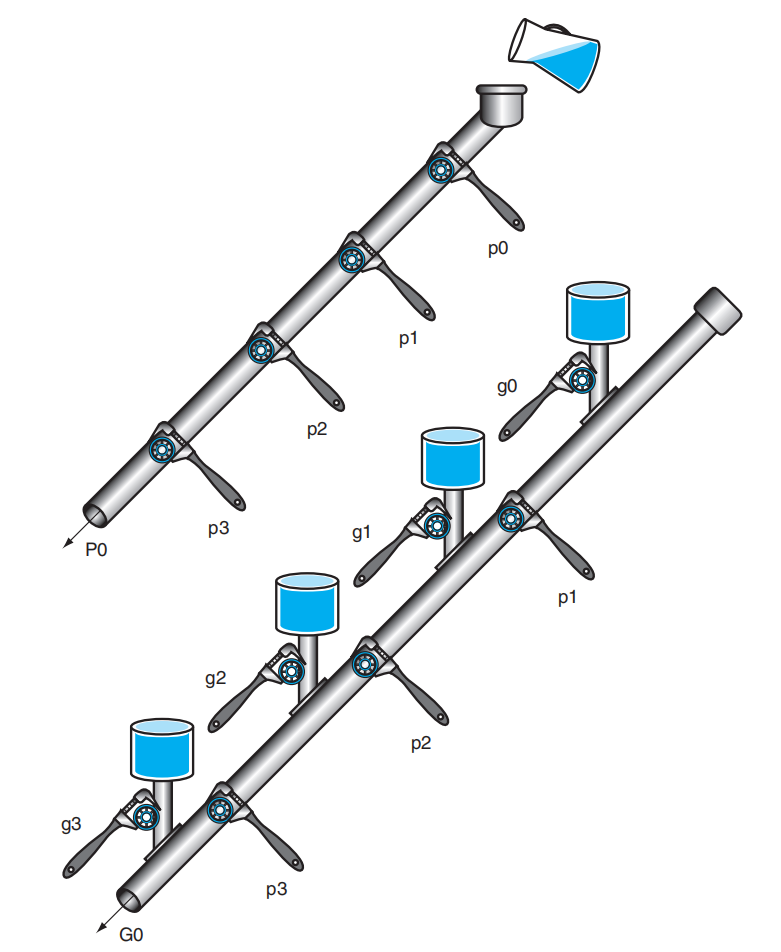
类比:水管系统
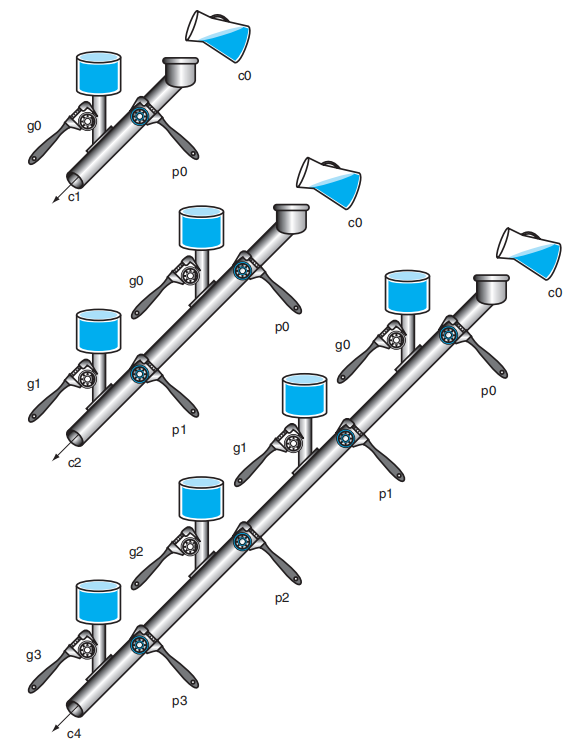
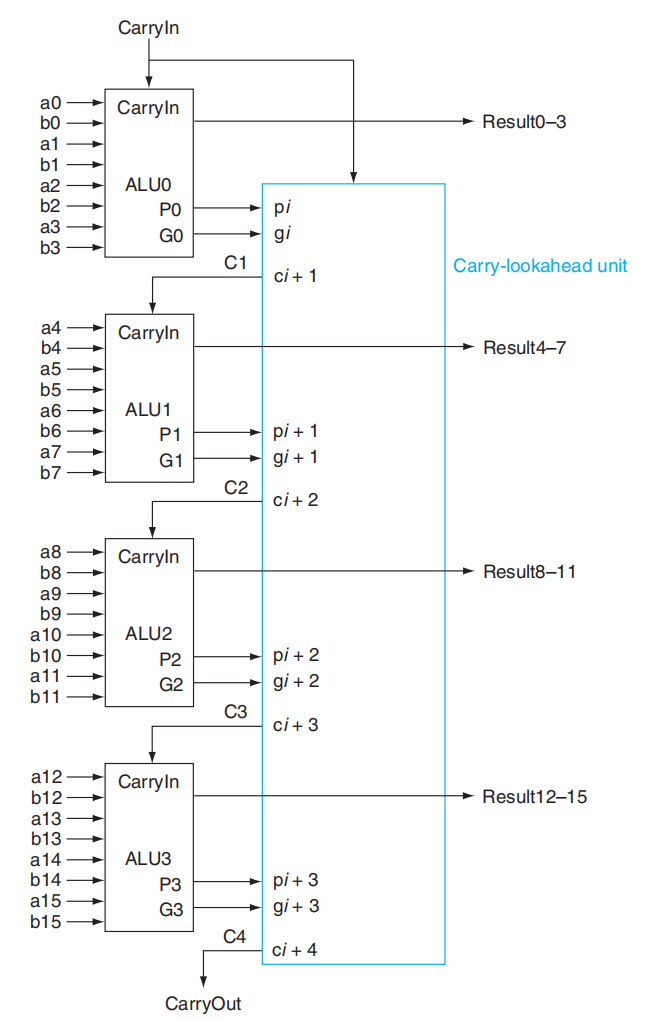
仅用一层抽象,我们可以在保持两级逻辑电路优势的同时,以较小的门成本实现 4 位加法进位的化简。但如果要继续扩展到更多的位,那就需要进一步的抽象设计。下面以 16 位加法器为例介绍更高层的抽象。
我们约定:
- 用 \(P_i\) 表示更高一级的传播项,它表示 4 个位上的 4 个 \(p_j\) 的乘积(与)
- 用 \(G_i\) 表示更高一级的生成项,它考虑 4 个位上的 4 个生成项的和(或
) ,注意位数较低的生成项受到更高位的传播项的制约
还是水管系统的类比
上图表示 \(P_i\),下图表示 \(G_i\)
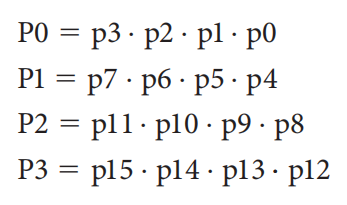
对于一个 16 位的加法器,我们用 \(p_j\) 和 \(g_j(0 \le j \le 15)\) 来展开 \(P_i\) 和 \(G_i(0 \le i \le 3)\):

最后,用 \(P_i\) 和 \(G_i\),以及最开始的进位 \(c_0\) 来表示 4 位一组的大进位 \(C_i\):
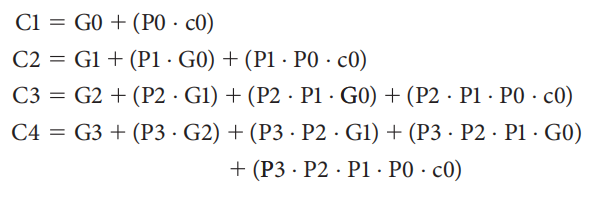
注
对于加法的进位,我们一般更在意最后的进位,因此中间产生的进位可以忽略。对于这个例子而言,我们无需关心 \(C_1\) 到 \(C_3\) 的实际内容,只需关注最高位的进位 \(C_4\)(它的值正好等于 \(c_{15}\))
超前进位加法器的逻辑电路图:
行波加法器与超前进位加法器的速度比较
为了便于讨论,我们用数据(或者说信号)经过门的数量来估算时间(也被称为门延迟(gate delay)
- 行波加法器:进位值每经过一个加法器,就需要经过两个门电路,因此 16 位加法器就需要经过 32 个门电路
- 超前进位加法器:在前面的分析中,我们知道这种加法器用到了两层抽象,每层抽象都是两级逻辑电路,外加 \(g_i\) 和 \(p_i\) 都用到了一个门,所以总共经过的门数量为 2 + 2 + 1 = 5 个 = \(\log_2 32\) 个
综上,后者的速度比前者快了 6 倍多。如果位数更多,超前进位加法器的优势还会更明显(遥遥领先 x)
其他快速加法器
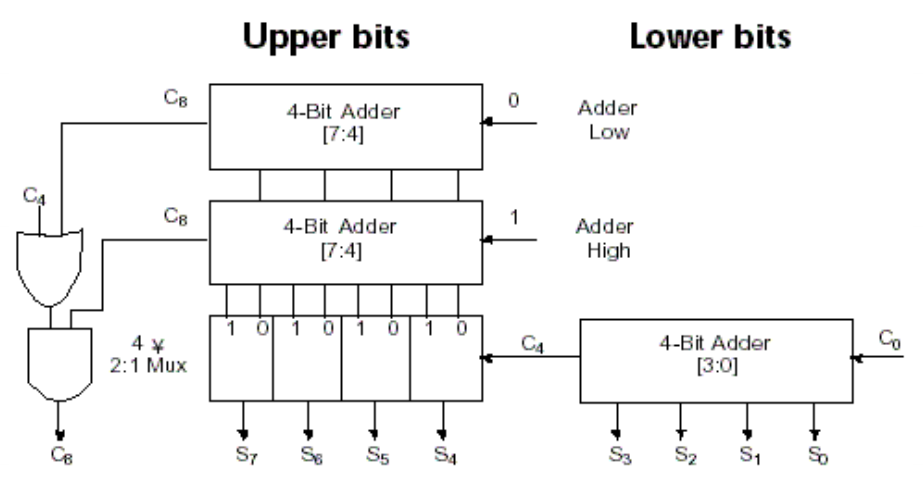
- 跳跃进位加法器 (carry skip adder):
课件上没详细展开,看起来也不像考点,过 - 选择进位加法器 (carry select adder):也是几个位为一组,高位组暂时不管来自低位组的进位,它直接把进位 0 和 1 的情况都先算出来,然后再根据之后传上来的进位选择正确的计算结果(预测 & 冗余)
例子

Multiplication⚓︎
乘法运算的实现原理就是我们小学时候学的竖式乘法,先来简单回顾一下(这里是二进制乘法,仅考虑 0 和 1
- 如果当前乘数 (multiplier) 位置上的数字为 1,那么就将被乘数 (multiplicand)(乘积就是被乘数)复制到正确的位置上(因为乘数数位每上升一位,这个乘积就要往右移一位)
- 如果数字为 0,那么就将 0 放在正确的位置上
- 如果被乘数为 n 位,乘数为 m 位,那么乘积的位数就是 n+m 位了
Sequential Multiplication Hardware⚓︎
V1⚓︎
根据上面的乘法规则,我们设计出 64 位的乘法器:

其中仅有乘数寄存器是 64 位,被乘数寄存器、ALU、乘积寄存器都是 128 位(因为在每一步的计算后,被乘数都需要向左移一位。因此在 64 次计算后,64 位的被乘数被移动了 64 位,所以被乘数寄存器需要 128 位)
运算流程(包括加法、移位、比较等运算
- 检查乘数的最低位数字
- 如果是 1,就将被乘数加到乘积的寄存器内;如果是 0,继续下一步
- 将被乘数寄存器的值左移一位
- 将乘数寄存器的值右移一位
- 如果已经完成 64 次计算,完成整个乘法运算;否则的话回到第一步继续计算
例子
V1 乘法器的问题
- 如果每一步花费一个时钟周期,那么完成整个乘法运算需耗费 200 个时钟周期——太慢了!
- 其中一个较为耗时的运算是 128 位的 ALU 加法运算,然而被乘数和被乘数都是 64 位的,只是因为被乘数要向左移,我们为被乘数寄存器多预留了 64 位,因而 ALU 也需要多留 64 位。
V2⚓︎
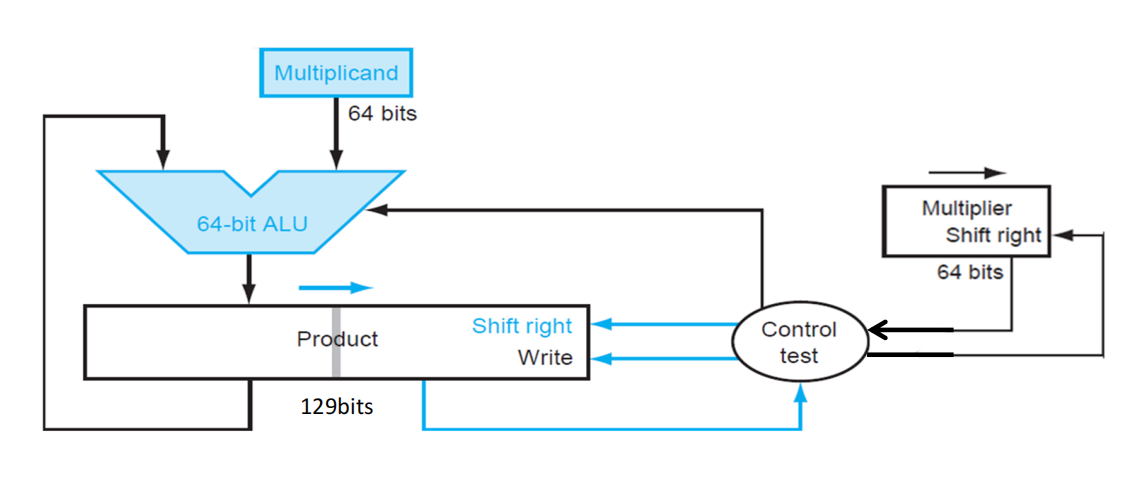
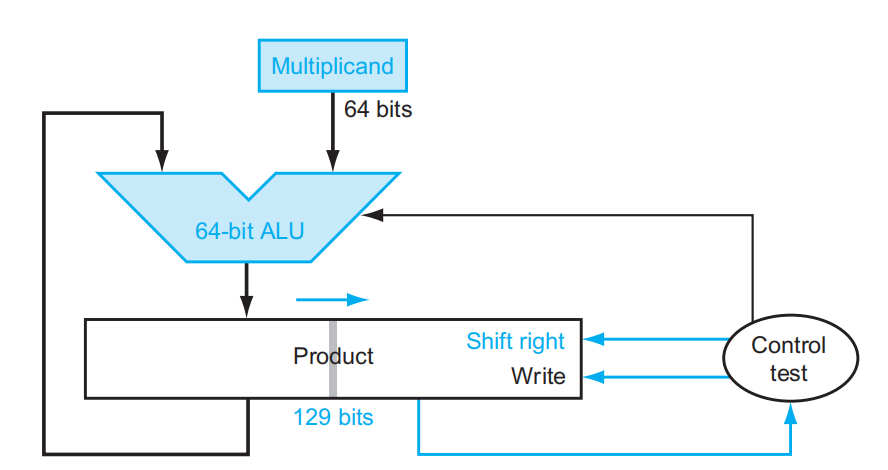
我们的改进方案是:不移动被乘数,改为移动乘积,这样的话被乘数寄存器就可以只用 64 位,而且 ALU 也可以仅用 64 位,而乘积寄存器需要扩展到 128+1 位。此时的中间计算就是 64 位加法运算,有效提升了乘法运算速度。逻辑电路图如下所示:
计算步骤:
- 检查乘数的最低位数字
- 如果是 1,就将被乘数加到乘积的寄存器内的左半边;如果是 0,继续下一步
- 将乘数寄存器的值右移一位
- 将乘积寄存器的值右移一位
- 如果已经完成 64 次计算,完成整个乘法运算;否则的话回到第一步继续计算
为何乘积寄存器是 129 位而非 128 位?
当被乘数与乘积寄存器的值相加时可能产生进位,因此需要多出 1 位来存储这个进位(当然乘积的结果不会超过 128 位
V3⚓︎
V2 乘法器的问题
- 初始状态下,乘积寄存器只有左半边的值保存值,右半边的很多位在刚开始没有什么意义,也就是说乘积寄存器的空间利用率太低了
- 每一趟循环中,乘数寄存器和乘积寄存器都需要往右移 1 位
改进措施:为了提高乘积寄存器的空间利用率,我们可以将乘数放在乘积寄存器的右半边。每一趟循环中,乘积寄存器里的所有位整体向右移一位,中间结果和乘数同时向右移一位。这样做的好处在于:
- 节省存储空间:少用一个 64 位的寄存器
- 加快运算速度:每趟循环中少了一次右移操作,提升了速度
逻辑电路图如下所示:
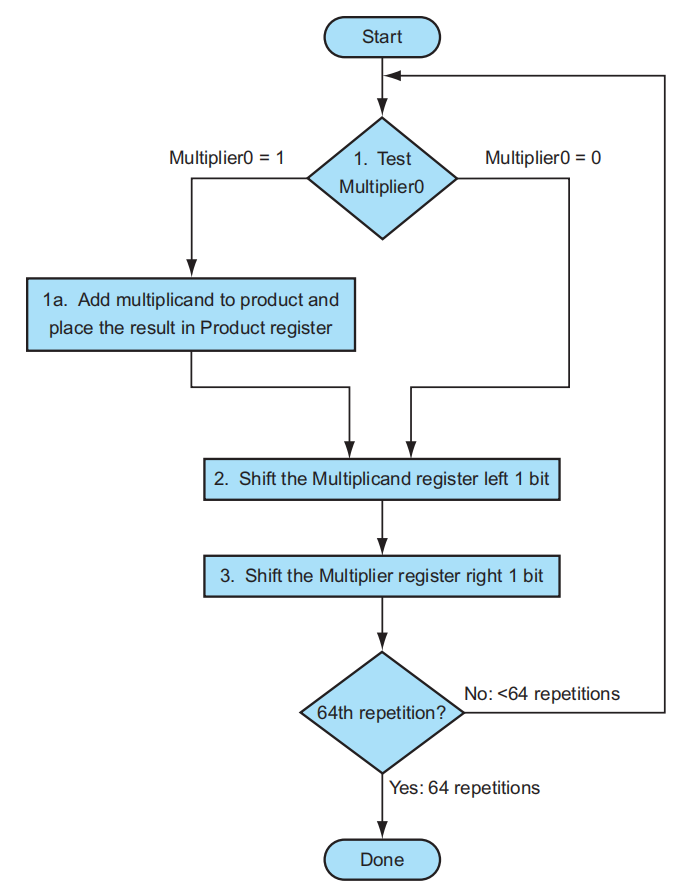
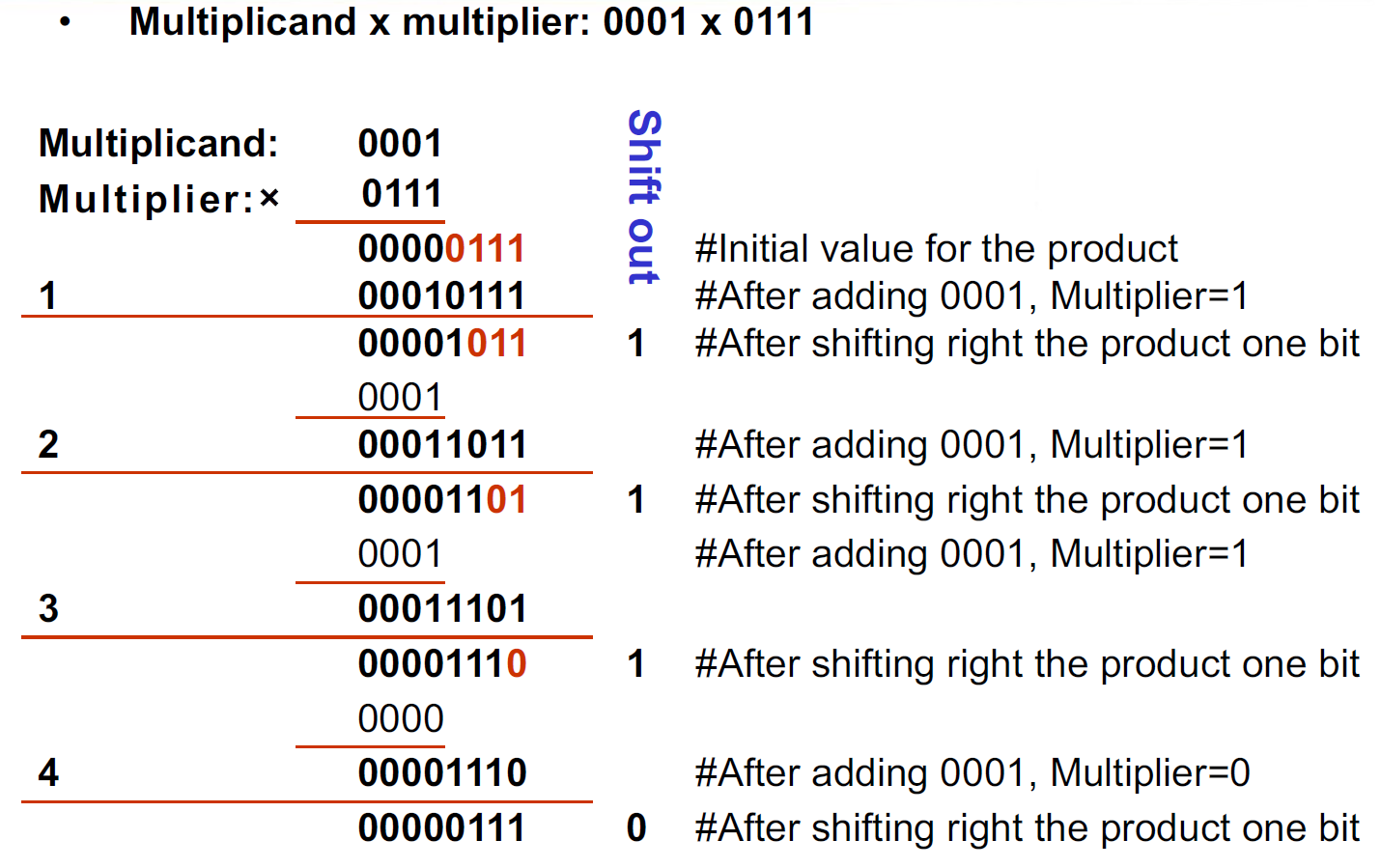
计算步骤:
- 检查乘数的最低位数字
- 如果是 1,就将被乘数加到乘积的寄存器内的左半边;如果是 0,继续下一步
- 将乘积寄存器的值右移一位
- 如果已经完成 64 次计算,完成整个乘法运算;否则的话回到第一步继续计算
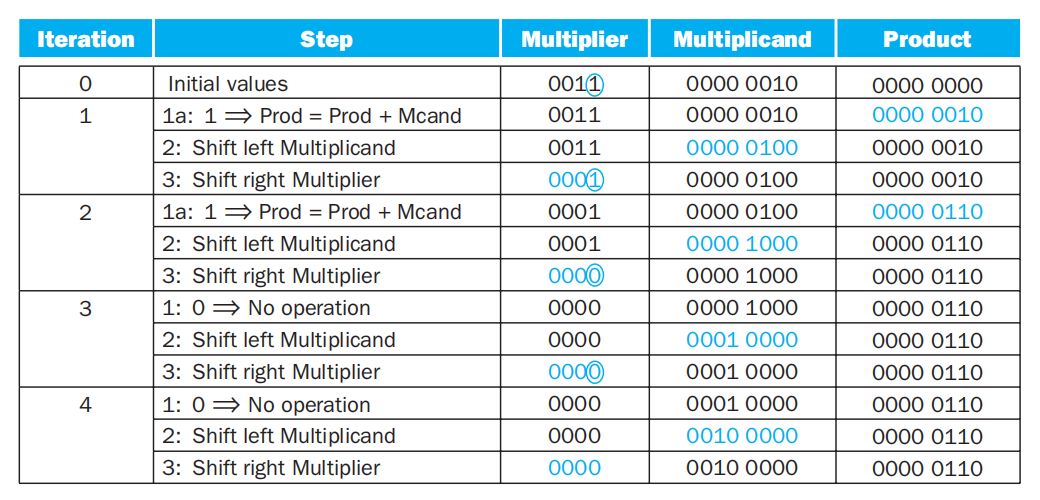
例子
注
如果一个数乘上 2 的 n 次幂,就相当于这个数左移 n 位,这时我们可以省略 ALU 的加法运算,直接进行移位运算即可。
Signed Multiplication⚓︎
较为简单的想法:
- 先存储两个操作数的符号位
- 将这两个操作数暂时转化为无符号数(令它们的最高位为 0)
- 执行乘法运算
- 对两个符号位进行异或运算,得到乘积符号位(相同为 0,不同为 1)
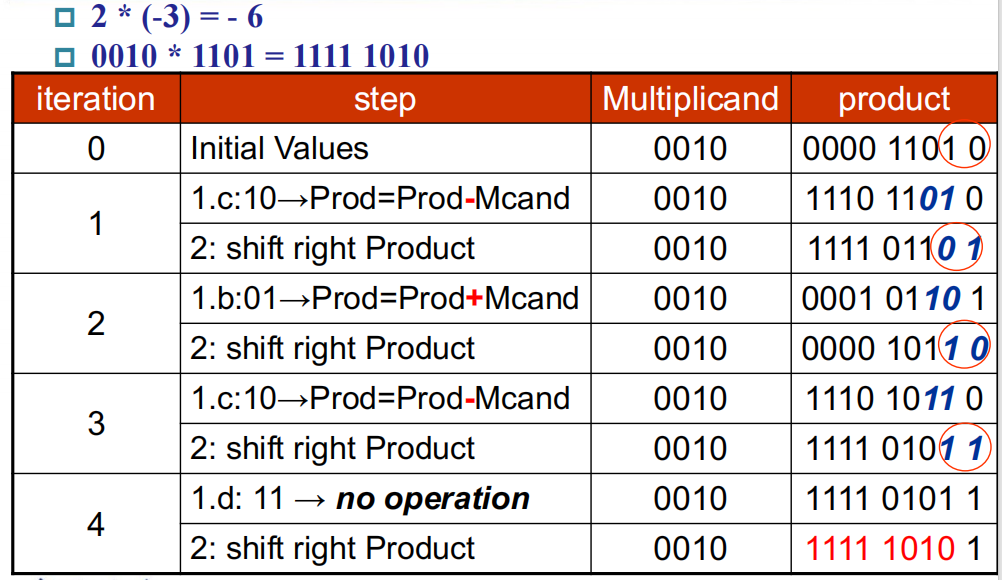
更好的方法:Booth 算法。相比前面多次使用加法和移位操作实现的乘法运算,这种算法更侧重于使用移位运算——它对乘数(multiplier) 做了一些变化,使得计算过程中仅涉及一次加法和一次减法。如果移位运算所需时间比加法运算少,那么这种方法的优势就比较明显了。这么说可能有点抽象,结合下面的例子理解就比较清楚了:
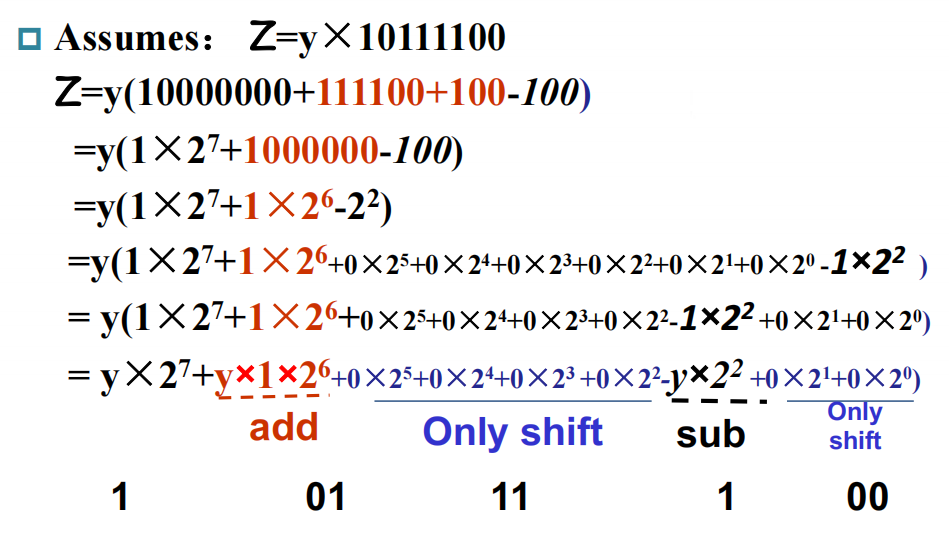
再稍微展开点说,它的原理是:将乘数中出现一连串1的部分(形如00..00111..1100..000,假设连续的1出现在第 i 位和第 j 位之间(包括这两位1000...000 - 100...00的减法(前者为 i+j+1 位,后者为 j+1 位1,现在就只有两个1了,与被乘数相乘的话,分别对应一个加法和一个减法,所以这个算法在速度上有了不错的提升(原本 \(O(n)\) 次加法运算降为 \(O(1)\) 次(减法也算作加法
然而,计算机可无法直接得到这种减法的形式,它通过判别相邻两位的数字来寻找合适的计算加减法的时机,下面是它的判别依据:
10:发现(可能)一连串1的开端(低位) ,做减法11、00:移位01:发现(可能)一连串1的末端(高位) ,做加法- 还要预留一个 -1 位,且初始化为 \(Bit_{-1} = 0\),便于最低位的判别。当进行右移运算时,原本最右边的数还会保留在 -1 位上,直至下一次右移运算
其他的说明:
- Booth 算法可用前面讲到过的乘法器来实现
- Booth 算法可以用于处理负数的乘法,且无需改变前面的规则便能实现。
例子
实现原理:Booth 算法 + V3 乘法器
Faster Multiplication⚓︎
另一种提升乘法速度的方法是提升加法的速度。下面的这个方法会用到很多的 ALU,将这些 ALU 像倒立金字塔似的摆放着,分层地进行加法运算。对于 64 位的乘法而言,第 1 层用到 32 个 ALU,每个 ALU 计算相邻 2 位的乘数分别与被乘数的乘积之和。这样得到的 32 个和在第二层的 16 个 ALU 中会被再一次汇总,如此下去,最终得到一个总的和。这样原本需要 64 次的加法时间,就缩短到 \(\log_2(64) = 6\) 次,速度得到明显的提升。这种方法体现了并行运算的思想。

RISC-V 中的乘法指令
mul rd, rs1, rs2:64 位乘法,rd保存 128 位乘积的低 64 位mulh rd, rs1, rs2:64 位乘法,rd保存 128 位符号数之间的乘积的高 64 位mulhu rd, rs1, rs2:64 位乘法,rd保存 128 位无符号数之间的乘积的高 64 位mulhsu rd, rs1, rs2:64 位乘法,rd保存 128 位无符号数与符号数的乘积的高 64 位
Division⚓︎
除法运算的实现原理是数论里的除法算法(其实也是小学学过的
64 位除法器的逻辑电路图如下(长得和 V1 乘法器很像
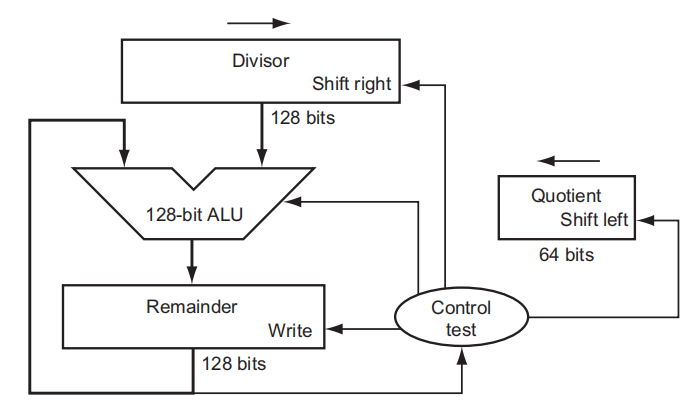
- 组成部分:
- 128 位除数 (divisor) 寄存器:初始状态下,64 位的除数被存储在除数寄存器的左半边(由于我们不清楚被除数有多大,所以先将除数扩大很多倍,然后再慢慢缩小,最终找到合适的位数,因此除数寄存器的位数留的有点多)
- 64 位商 (quotient) 寄存器
- 128 位余数 (remainder) 寄存器:初始状态下,64 位的被除数(dividend) 被存储在余数寄存器的右半边(从低位开始存储)
- 128 位 ALU
- 控制器
-
运算流程:
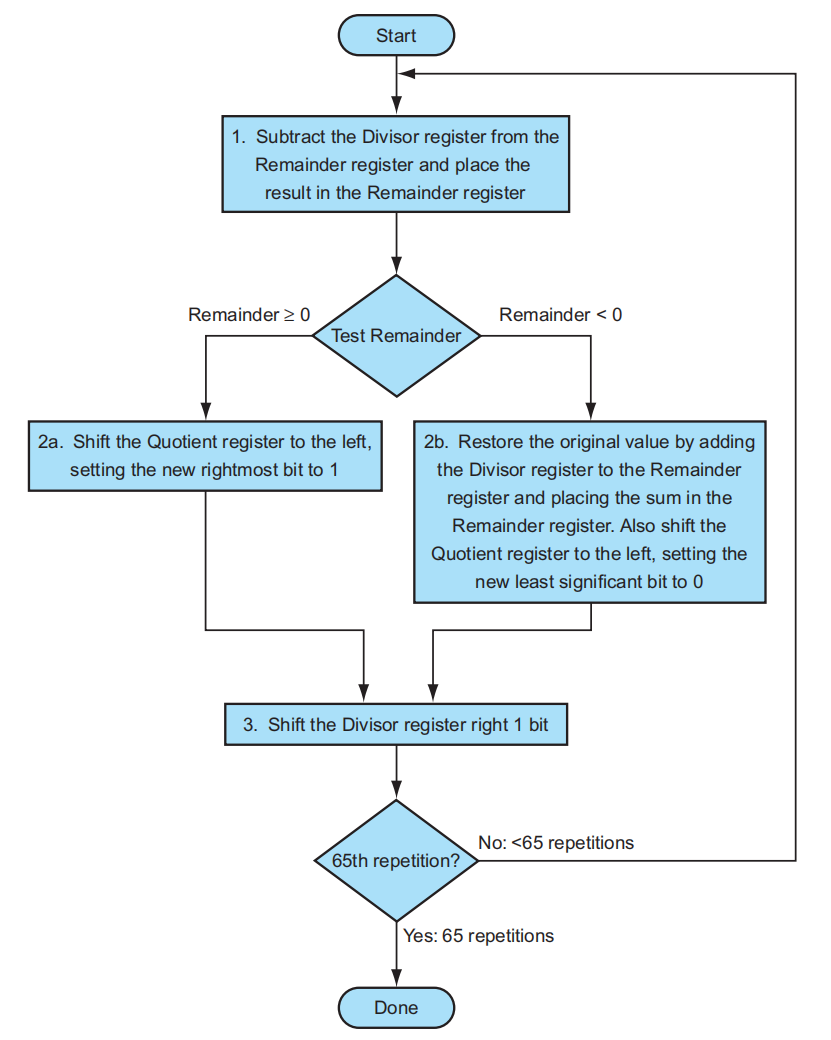
- 用余数寄存器的值减去除数寄存器的值,并将结果放在余数寄存器
- 将商寄存器里的值左移一位,然后检查余数寄存器内的值
- 若其值 \(\ge 0\)(看符号位(最高位)的数字
) ,则将商寄存器最右端的位设成 1 - 若其值 \(< 0\),则将除数寄存器的值加到余数寄存器的值以撤销上一步的减法操作,并将商寄存器最右端的位设成 0
- 若其值 \(\ge 0\)(看符号位(最高位)的数字
- 将除数寄存器的值右移一位
- 如果上面的步骤已经重复了65 次,中止整个流程,否则返回第一步
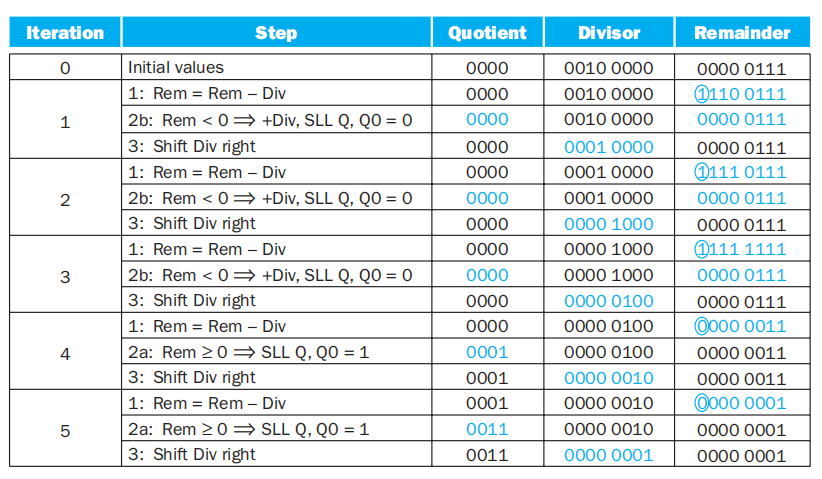
例子
用 4 位除法器计算除法:\((7)_D \div (2)_D\),或者 \((0111)_B \div (0010)_B\)
Improved Version⚓︎
我们可以借鉴 V1 乘法器进化到 V3 乘法器的经验,将某几步操作放在一起进行(节省时间
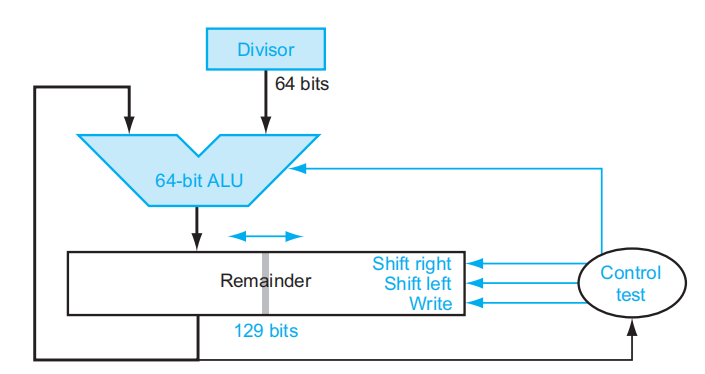
这个除法器有了以下的改进之处:
- 除法寄存器的位数降至 64 位,从而 ALU 的位数也降至 64 位,节省空间的同时提升了 ALU 做减法的计算速度
- 去掉了商寄存器,将商放在余数寄存器的右半边,而左半边用于存放余数
- 初始情况下由于没有算出商,因此余数(此时为被除数)暂时存在余数寄存器的右半边,之后会不断往左移
- 余数寄存器多出的 1 位,是为了间隔余数和商的值,防止计算的时候混淆
- 该除法器还减少了 1 次迭代过程
计算步骤为(仍是以 64 位除法器为例
- 将被除数放在余数寄存器的右半边,然后将余数寄存器左移一位
- ALU 计算(余数寄存器的高 64 位 - 除数寄存器
) ,将结果放在与余数寄存器的高 64 位上- 如果计算结果 >0,余数寄存器左移一位,将 1 放入余数寄存器的最右端
- 如果计算结果 <0,则加上除数以撤销前面的减法操作,然后余数寄存器左移一位,将 0 放入余数寄存器的最右端
- 若第 2 步已经执行过 64 次,则结束循环,否则继续执行第 2 步
- 将余数寄存器的左半边右移一位,此时左半边存的是余数,右半边存的是商
注
- 不难发现,V3 乘法器与改进后的除法器从逻辑结构上看几乎没有区别,最大的区别在于它们控制信号的不同
- 这个过程还是有些绕的(
我自己就被绕晕了很多次) ,需要下功夫理解清楚,建议看下面给出的例子以加深理解
例子
还是计算 \((7)_D \div (2)_D\),只不过用改进过的除法器:
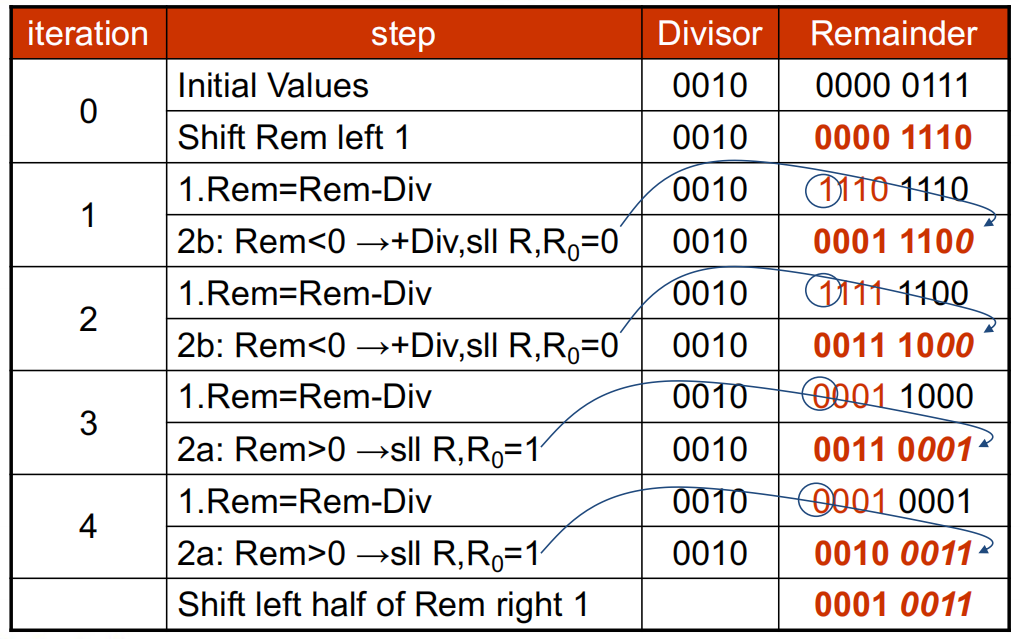
不难发现,相比上面的例子,此时每次迭代过程中少进行一步操作(移动除数
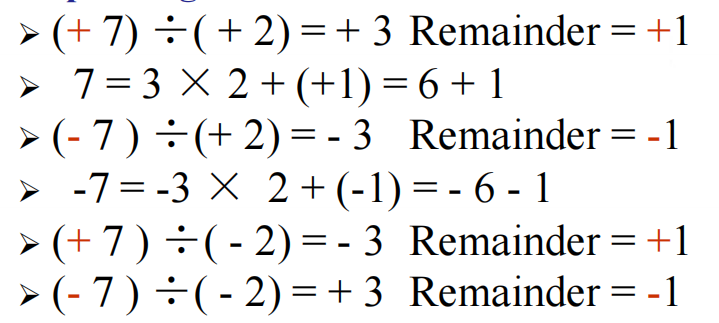
Signed Division⚓︎
使用类似符号数乘法运算的方法:先将被除数和除数的符号位提取出来,然后计算无符号除法,最后根据两个符号位决定商的符号位:如果两者相同,商的符号位为 0,否则为 1。
但较为麻烦的地方在于决定余数的值,简单来说它遵循以下规则:
- 余数的符号位同被除数的符号位
- 余数的绝对值不超过除数的绝对值
例子
Fast Division⚓︎
遗憾的是,我们不能像乘法运算那样,通过 ALU 的并行计算来提升除法速度,因为中间过程会用到很多减法运算,余数寄存器上的符号位是随时变化的,依赖于运算的顺序,所以只能在最后确定符号位,不能提前计算出来。
改进措施:SRT Division,在每一趟循环中尝试预测多个可能的商(个人认为类似前面提到过的选择进位加法器)
注意
RISC-V 会忽视除法运算过程中出现的溢出和除以 0 的问题,一般由软件决定怎么处置这两类异常情况。
RISC-V 中的除法指令
div rd, rs1, rs2:rd保存符号数除法的商divu rd, rs1, rs2:rd保存无符号数除法的商rem rd, rs1, rs2:rd保存符号数除法的余数remu rd, rs1, rs2:rd保存无符号数除法的余数
Floating Point Numbers⚓︎
IEEE 754 Floating-Point Standard⚓︎
下面对浮点数的规定来自于IEEE 754标准,而 RISC-V 的浮点数便采用这一标准。该标准提升了浮点数程序的可移植性,并且保证了算术运算的质量。
在接下来的讨论中,我们统一使用科学计数法(scientific notation) 表示浮点数,在这种表示法下小数点左边只有 1 位数字。如果小数点左边的数字不是 0,那么称这种数为规范化数(normalized number)。
二进制的规范化数形如下面的数字:
使用科学计数法的好处在于:
- 简化交换浮点数数据的过程
- 简化浮点数的算术运算
- 提升存储数字的精度
浮点数表示法由三部分组成:符号 \(S\)、指数(exponent)\(E\)、尾数(fraction)\(F\)。其中指数和尾数分别指定了浮点数的范围和精度。由于数据宽度是固定的,因此需要权衡好指数与位数的大小,即权衡好浮点数的范围和精度。用符号化的语言可以将浮点数表示为:
浮点数的表示形式(这种表示法被称为sign and magnitude
-
单精度(
float)
- 范围:\(2.0_{\mathrm{ten}} \times 10^{-38} \sim 2.0_{\mathrm{ten}} \times 10^{38}\)
- 根据偏移码的知识(后面马上会讲的
) ,实际上单精度浮点数的指数取值范围为 \([-126, 127]\)(最低的 -127 和最高的 128 被保留了无法使用) ,那么 \(\pm 1.0 \times 2^{-126} \approx \pm 1.2 \times 10^{-38}, \pm 2.0 \times 2^{127} \approx \pm 3.4 \times 10^{38}\)
- 根据偏移码的知识(后面马上会讲的
- 精度:23 位尾数 \(\approx\) 6 位十进制数
- 范围:\(2.0_{\mathrm{ten}} \times 10^{-38} \sim 2.0_{\mathrm{ten}} \times 10^{38}\)
-
双精度(
double)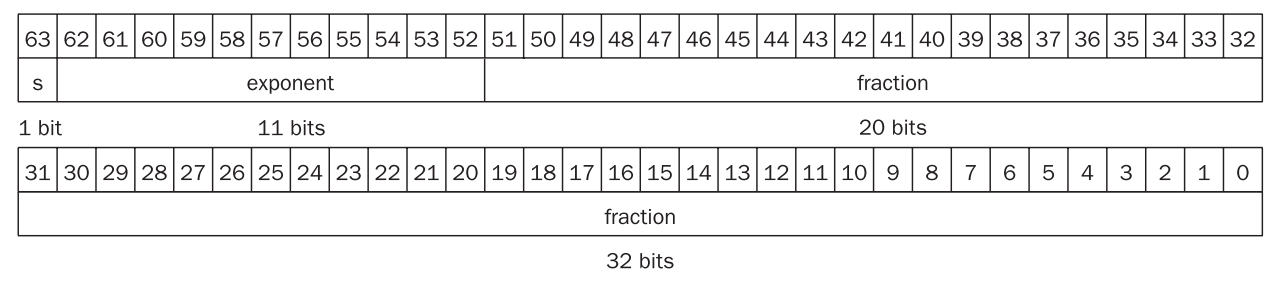
注:教材上给出的图片是错误的(指数位多了一位
) ,这张图是我 P 过的- 范围:\(2.0_{\mathrm{ten}} \times 10^{-308} \sim 2.0_{\mathrm{ten}} \times 10^{308}\)
- 根据偏移码的知识,实际上单精度浮点数的指数取值范围为 \([-1022, 1023]\)(最低的 -1023 和最高的 1024 被保留了无法使用
) ,那么 \(\pm 1.0 \times 2^{-1022} \approx \pm 2.2 \times 10^{-308}, \pm 2.0 \times 2^{1023} \approx \pm 1.8 \times 10^{38}\)
- 根据偏移码的知识,实际上单精度浮点数的指数取值范围为 \([-1022, 1023]\)(最低的 -1023 和最高的 1024 被保留了无法使用
- 精度:52 位尾数 \(\approx\) 16 位十进制数
- 范围:\(2.0_{\mathrm{ten}} \times 10^{-308} \sim 2.0_{\mathrm{ten}} \times 10^{308}\)
不难发现,二进制下的非零规范化数的小数点左边那一位一定是 1,因此为了存储更多的数字,我们就省去这个 1(称为hidden 1
其中 \(\mathrm{Fraction}\) 是一个位于 0-1 之间的数,如果我们假定它的每一位分别为 \(s_1, s_2, s_3, \dots\),那么又可以表示为:
之所以 RISC-V 会按照符号、指数、尾数的顺序存储浮点数,其中一个原因是为了方便浮点数的比较或排序:先比较符号位,再比较指数,最后比较尾数,这样的比较顺序符合我们的直觉。但正数和负数之间的比较就比较麻烦了:如果用补码表示指数位,那么负数的指数看起来就比正数的指数大很多(负数符号位,即最高位为 1
因此,IEEE 754 标准引入了偏移标记法(biased notation) 的概念,使得最小的指数(负数)对应 \(00 \dots 00_{\mathrm{two}}\),最大的指数对应 \(11 \dots 11_{\mathrm{two}}\),这样就可以直接做无符号数的比较,便于计算机处理。
- 偏移值的计算公式:\(\text{Bias} = 2^{\text{Number of Exp bits } - 1} - 1\)
- 单精度浮点数的偏移值 \(\mathrm{Bias}\) 为 127,双精度浮点数的偏移值 \(\mathrm{Bias}\) 为 1023
- 现在浮点数表示成如下形式:
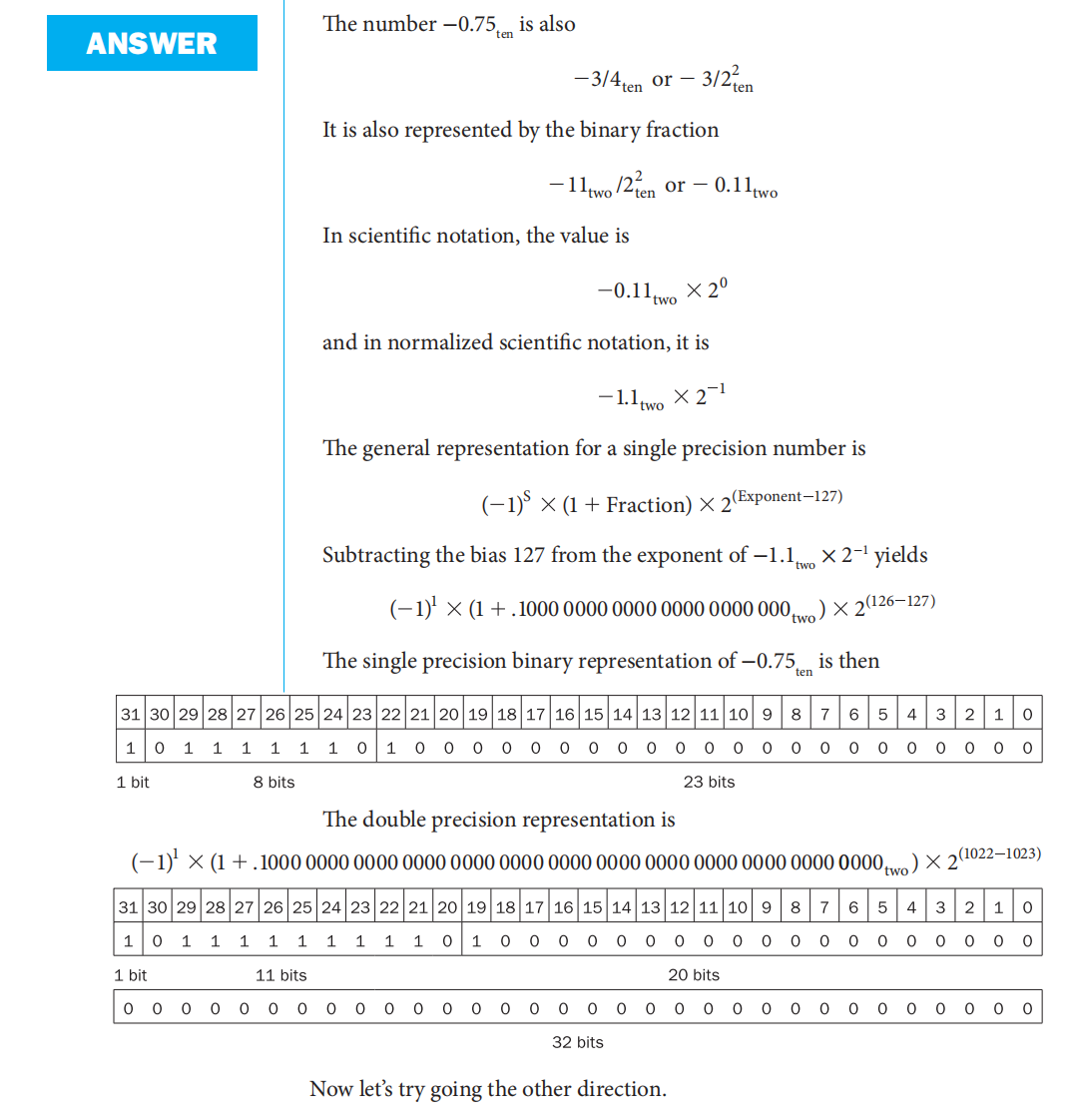
例题

异常情况的处理:
- 溢出:虽然浮点数表示的范围很大,但还是可能会出现这一情况。在浮点数中,溢出分为上溢(overflow) 和下溢(underflow),分别表示浮点数的正指数过大或负指数过小的情况。具体处理方法在前面已经提到过了,这里便不再赘述
- NaN(Not a Number):表示未定义的(undefined) 或非法的(illegal) 结果,比如:
- 任何涉及 NaN 的运算结果
- 不定式(无穷之间的运算、无穷与 0 的运算
) :- 除法运算:0/0、\(\infty\)/\(\infty\)、\(\infty\)/(\(-\infty\))、(\(-\infty\))/\(\infty\)、(\(-\infty\))/(\(-\infty\))
- 求余运算:任意值 % 0、\(\infty\) % 任意值
- 乘法运算:0\(\times \infty\)、0\(\times -\infty\)
- 加法运算:\(\infty\) + (−\(\infty\))、(−\(\infty\)) + \(\infty\)
- 减法运算:\(\infty\) - \(\infty\)、(\(-\infty\)) - (\(-\infty\))
- 指数运算:\(0^0\)、\(\infty^0\)、\(1^\infty\)、\(\infty^-\infty\)
- 产生复数结果或无意义的实数运算,比如对负数开偶次方根、对负数进行对数运算等
注意
虽然在数学中,任何数除以 0 的结果是未定义的,但是在 IEEE 754 标准下,这个结果被定义为 \(\infty\) 或 \(-\infty\),不要搞错了!
IEEE 754 标准下的浮点数的编码形式:

补充:半精度浮点数
半精度浮点数是 16 位的浮点数,它同样来自 IEEE 754 标准,它的组成部分为:
- 最高位仍然是符号位S
- 中间 5 位是指数位E
- 低 10 位是尾数位F
- 偏移码 (bias) 为 \(2^{5-1} - 1 = 15\)
能够表示的数的范围:\(\pm 1.0 \times 2^{-14} \sim \pm 2.0 \times 2^{15}\)
实用工具:IEEE 754 浮点数转换器
Floating-Point Addition⚓︎
下面是浮点数加法的流程图:
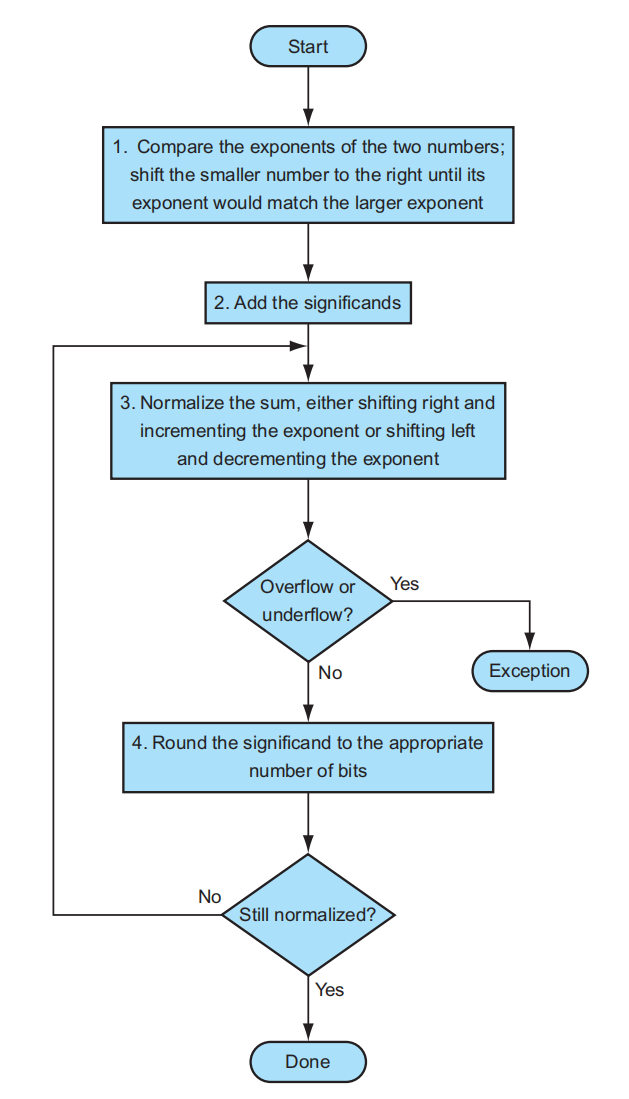
- 对齐(alignment):比较两个数的指数部分,将指数较小的数的尾数部分往右移(对应地,指数部分就会增大
) ,直到两个数指数部分相同为止 - 相加(addition):将两个数的有效数字 (significand) 相加
-
规范化(normalization):使结果规范化(见前面“规范化数”的定义
) ,可以通过右移尾数来增加指数,或者左移尾数来减小指数的方式实现注:前往下一步之前还要判断一下数字是否溢出,如果是的话抛出异常,否则继续下一步
-
舍入(rounding):如果舍入后结果变得不规范,则需要返回到第 3 步再做调整,否则的话计算完成
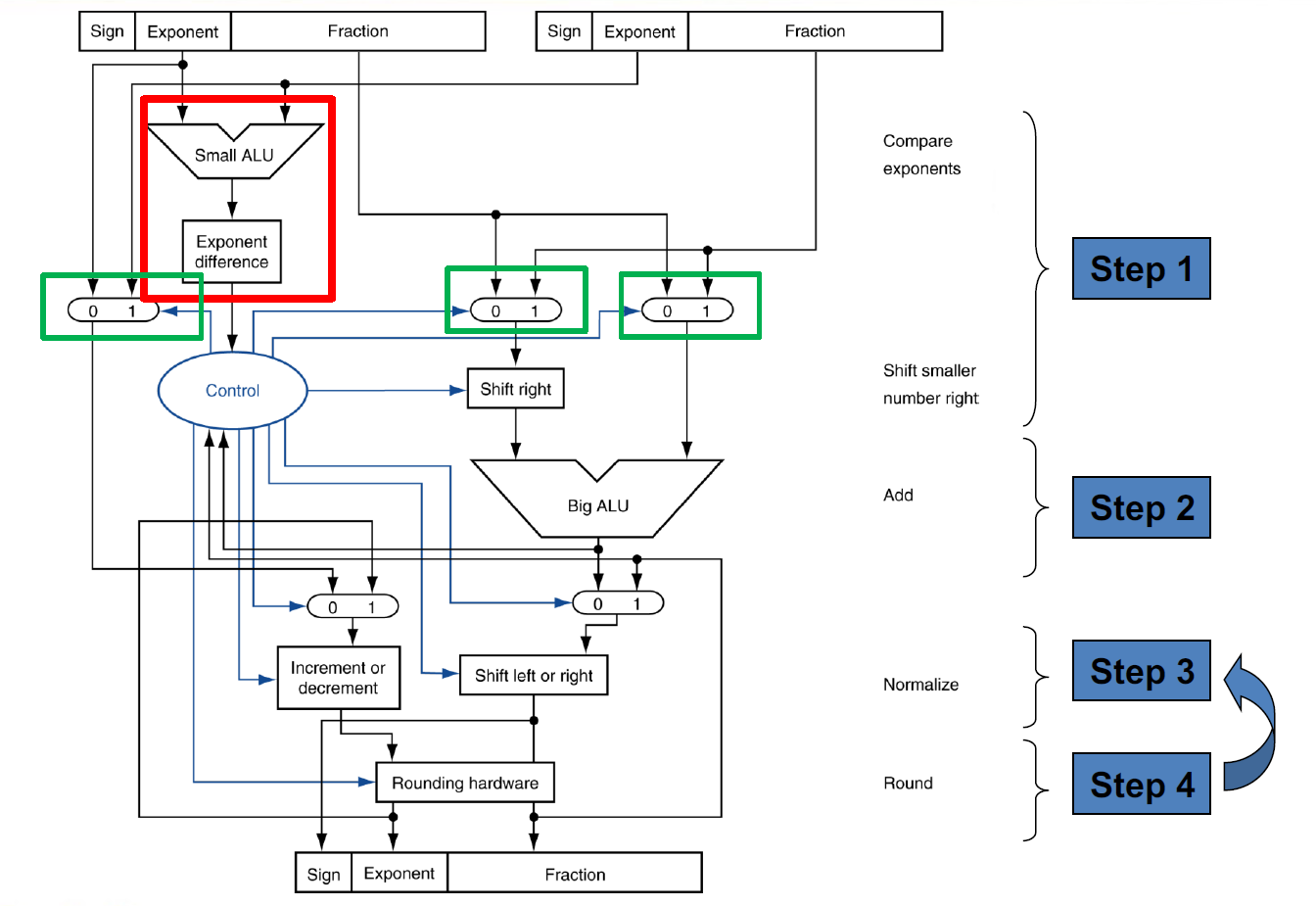
对应的逻辑电路图如下所示(仅做了解即可
例题
计算 \(9.999_{\mathrm{ten}} \times 10^1 + 1.610_{\mathrm{ten}} \times 10^{-1}\)

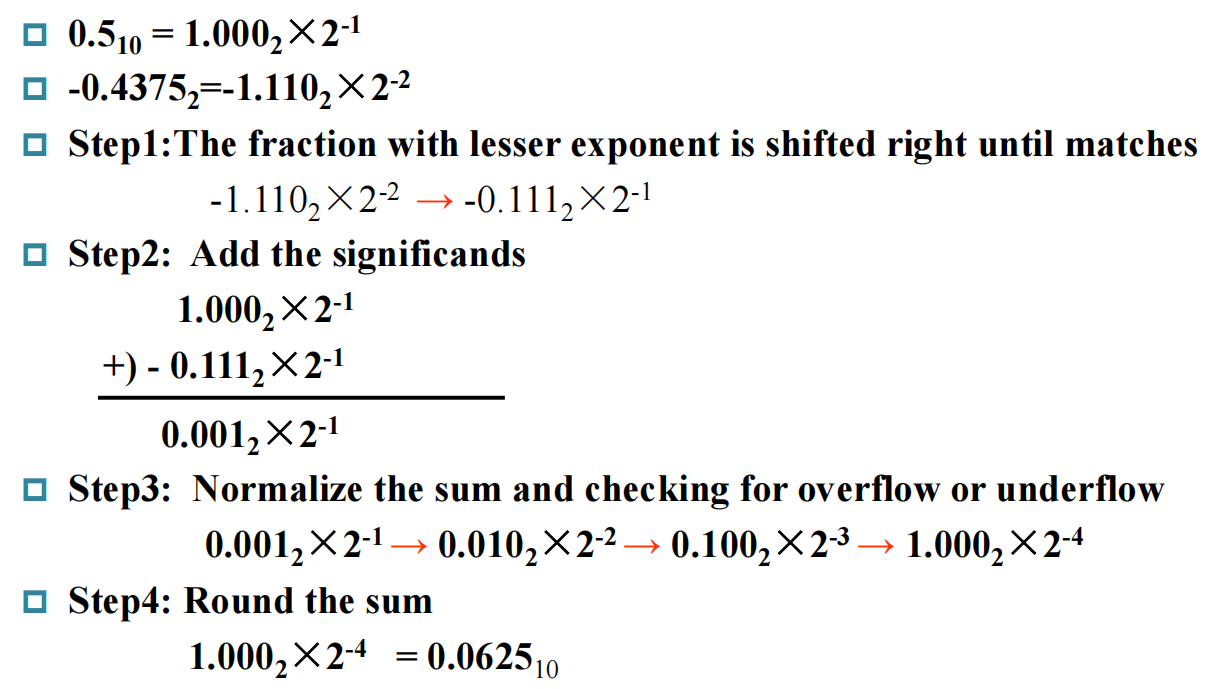
计算 \(0.5_{\mathrm{ten}} + (-0.4375_{\mathrm{ten}})\)
Floating-Point Multiplication⚓︎
下面是浮点数乘法的流程图:
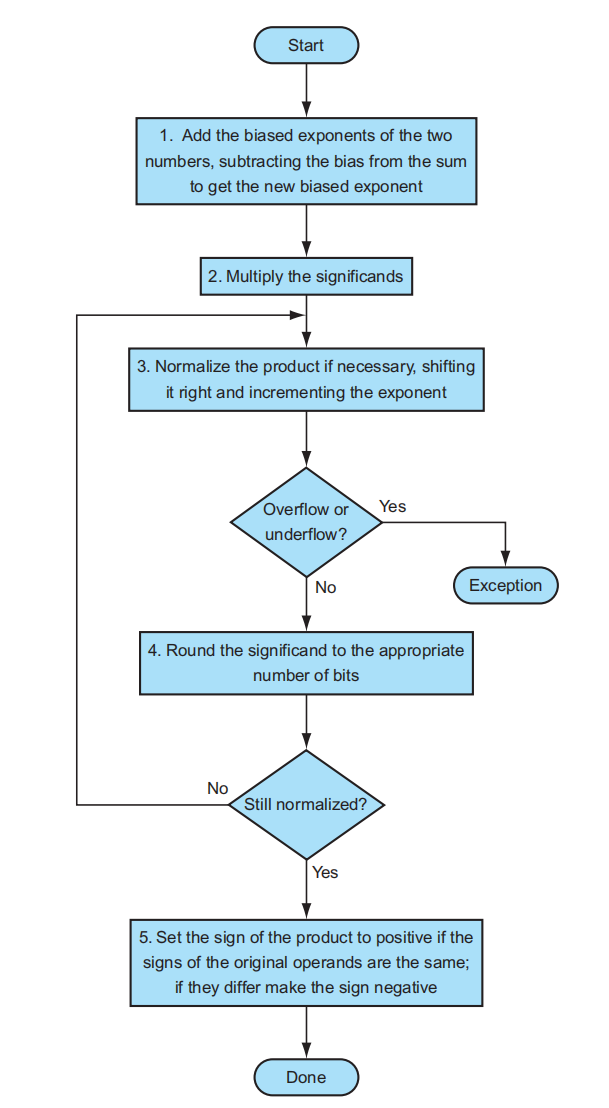
- 将两个带偏移量的指数相加(偏移量算了两次
) ,并减去多算的一个偏移量 - 有效位数相乘
- 如有必要,使乘积规范化;如果有溢出,抛出异常并中止程序,否则继续下一步
- 对有效数字四舍五入,如果结果不规范,需要回到第 3 步再次调整,否则继续下一步
- 如果两个操作数的符号位相同,乘积的符号位为正;否则乘积的符号位为负。完成计算
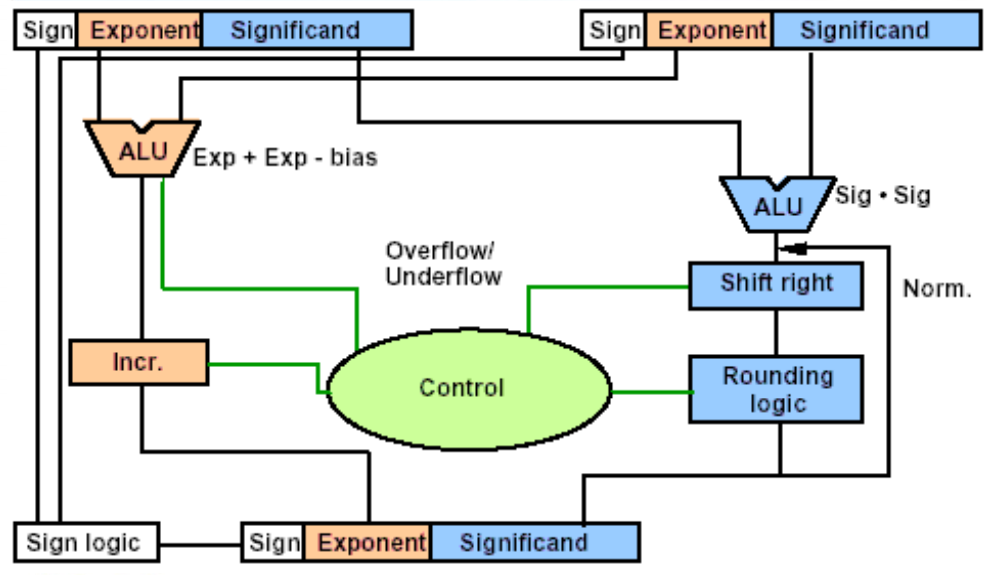
对应的逻辑电路图如下所示(仅做了解即可
例题
- 例 1:教材 \(P_{201, 203}\)
- 例 2:教材 \(P_{205-206}\)
Accurate Arithmetic⚓︎
为了提高舍入的精度,IEEE 754 标准规定为浮点数额外添加低 2 位,从左到右分别称为guard和round,这两位数字保留了浮点数计算的中间过程,从而尽可能地避免精度上的损失。
还可以再额外添加第 3 位,称为sticky。
例子
左图使用了 guard 和 round,右图没有使用这两位数字
由于规定有效位数为 3 位,因此前者的最终计算结果为 2.37,从而可以看出 guard 和 round 确实能够提升浮点数计算的精度。

摘自作业题,这题可以很好地检测各位对浮点数及其加法运算的理解。
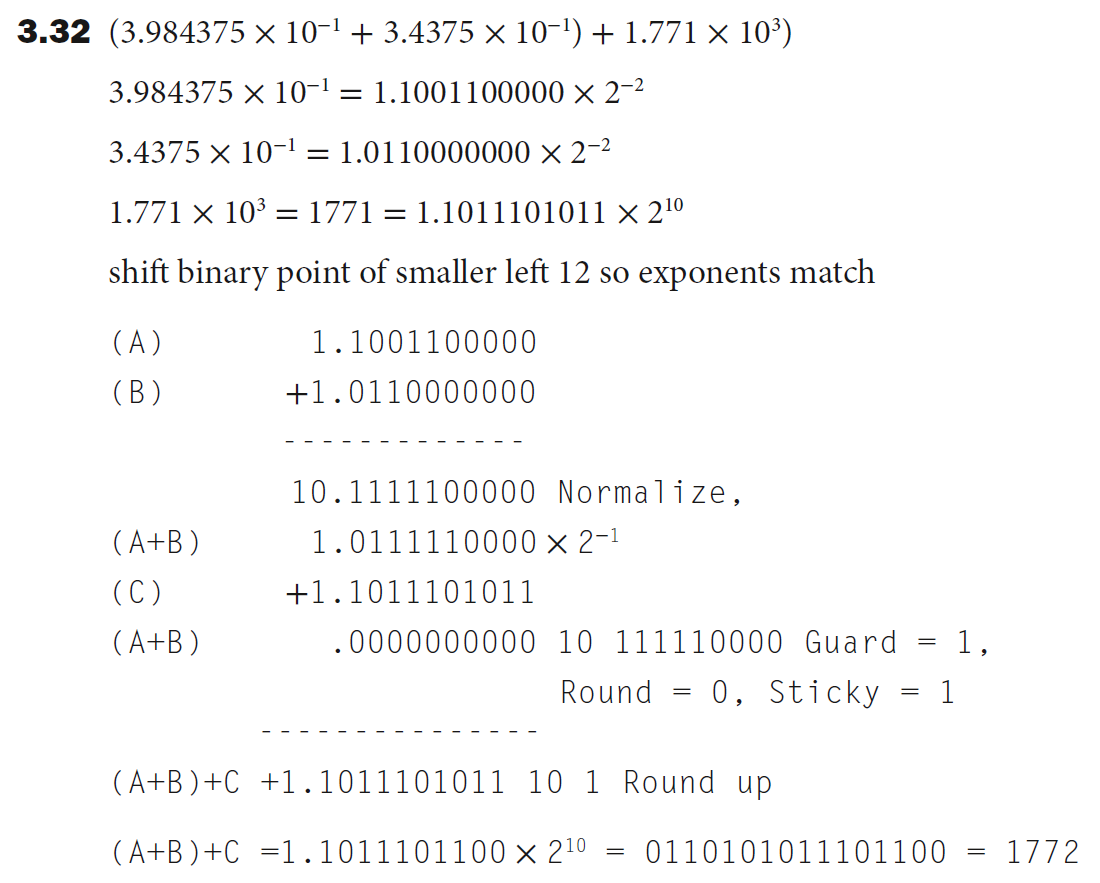
最后一位上的单位值 (unit in the last place, ulp):看不太懂,就引用了原文 ...
The number of bits in error in the least significant bits of the significant between the actual number and the number that can be represented.
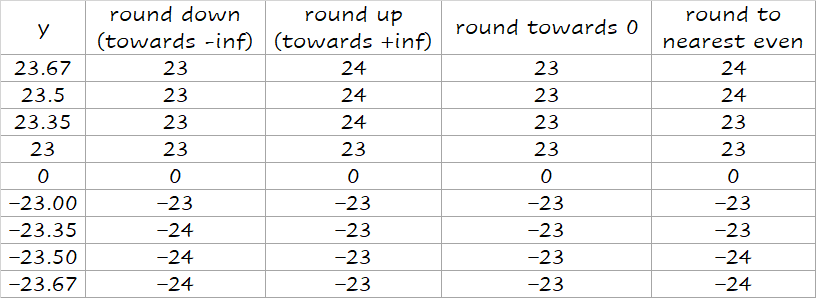
IEEE 754 标准还提供了四种舍入模式 (rounding mode):
- 向上取整
- 向下取整
- 截断取整
- 舍入至最近的偶数 (round to nearest even)
下图用具体的数据展示这四种不同的模式(图片来自 xyx 前辈的笔记
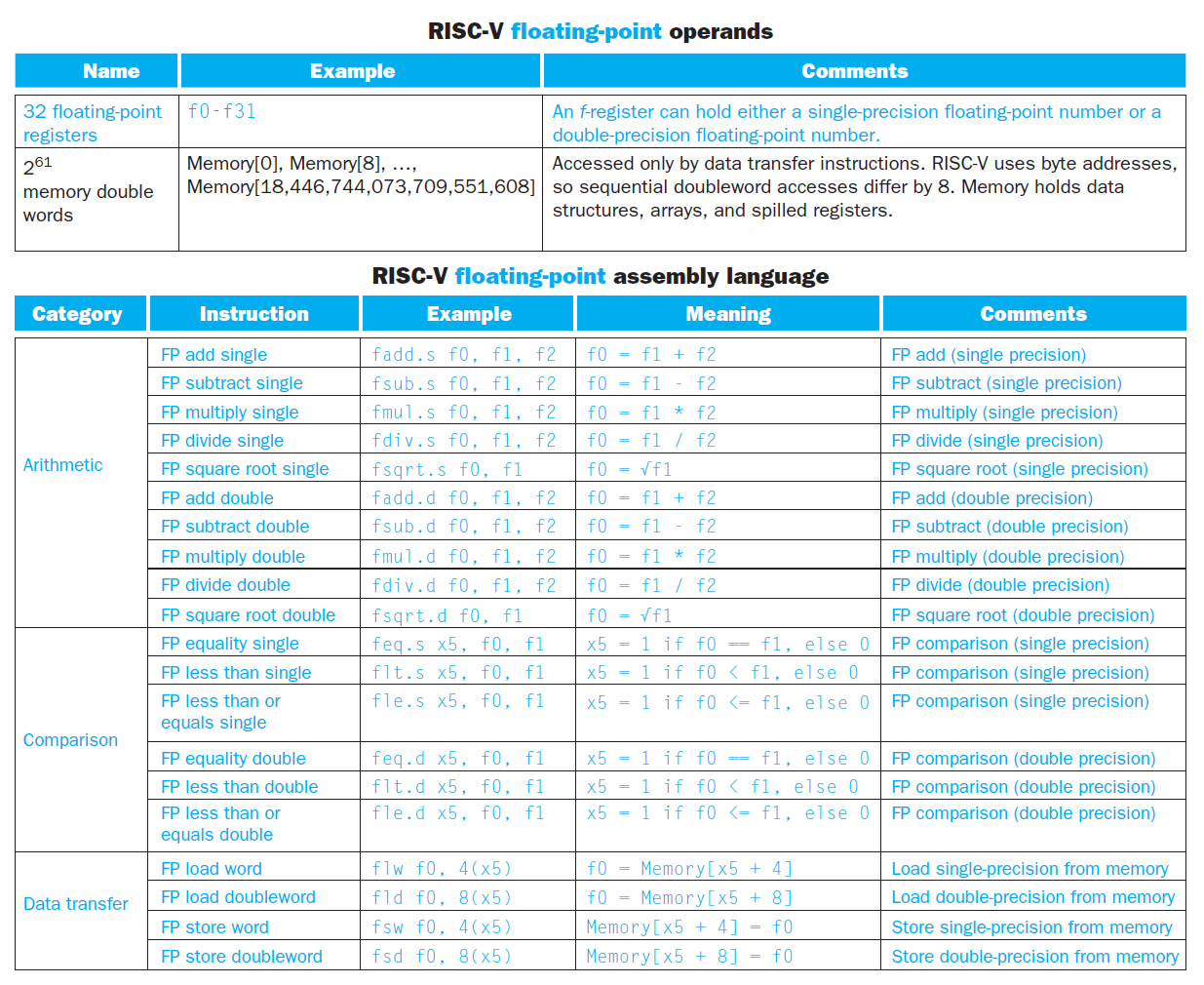
浮点数相关的 RISC-V 汇编操作数 & 指令(仅做了解)
Fallacies and Pitfalls⚓︎
谬误
-
将一个数右移就相当于对这个数整除以 2
- 这个结论对于无符号数是成立的,但是对于符号数,如果整体向右移一位,符号位也会跟着右移,那么最高位就会变成 0,导致负数变成了正数
- 解决方法:右移符号位 1 的时候,符号位左边的数均为 1,这样保证结果仍然是一个负数(符号扩充)
-
适用于整数的并行计算也同样适用于浮点数
- 请注意:由于浮点数在计算过程中精度可能会损失,所以结合律 (associative) 是无效的,即对于浮点数 \(a, b, c\),\(c + (a + b) \ne (c + a) + b\)
例子
(这里第二个式子等号左边的括号位置错了
! )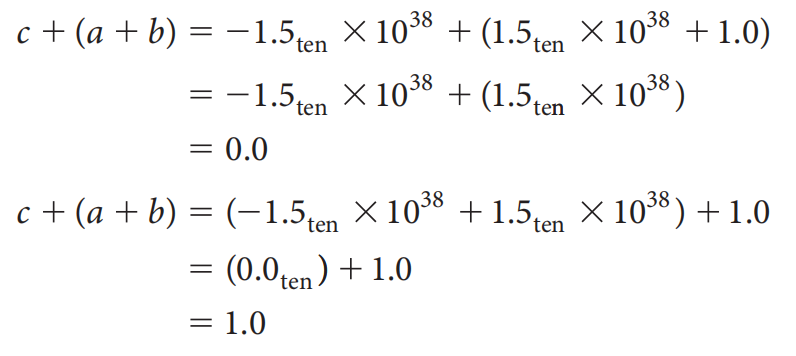
可以看到,使用结合律后,计算结果就完全不一样了
- 并行计算的实现依赖于结合律,因此浮点数无法进行并行计算
评论区