Competitors of Transformer⚓︎
约 3083 个字 预计阅读时间 15 分钟
每一种架构的存在都有一个理由:
- CNN:相比适用面更广的全连接层,卷积层有更大的模型偏移,并根据图像特征,减少不必要的参数,避免过拟合
-
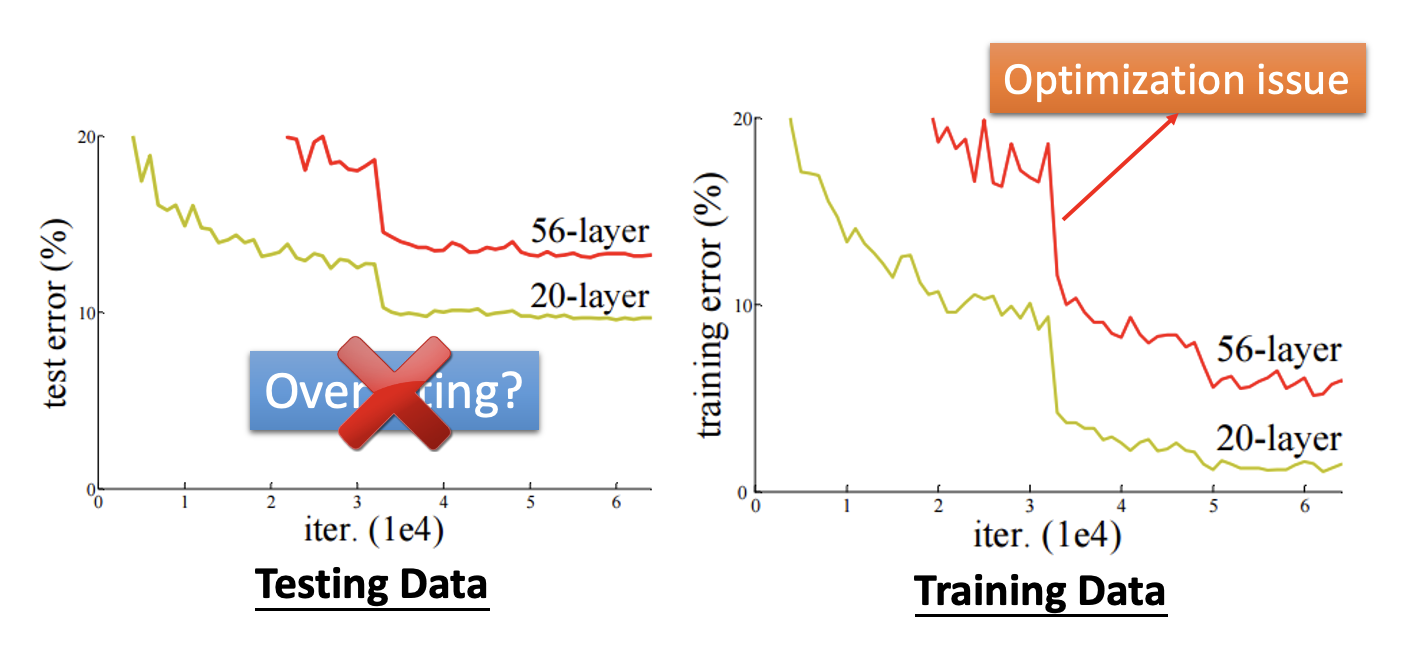
残差连接(residual connection):
-
如果没有残差连接,优化模型参数会比较吃力
-
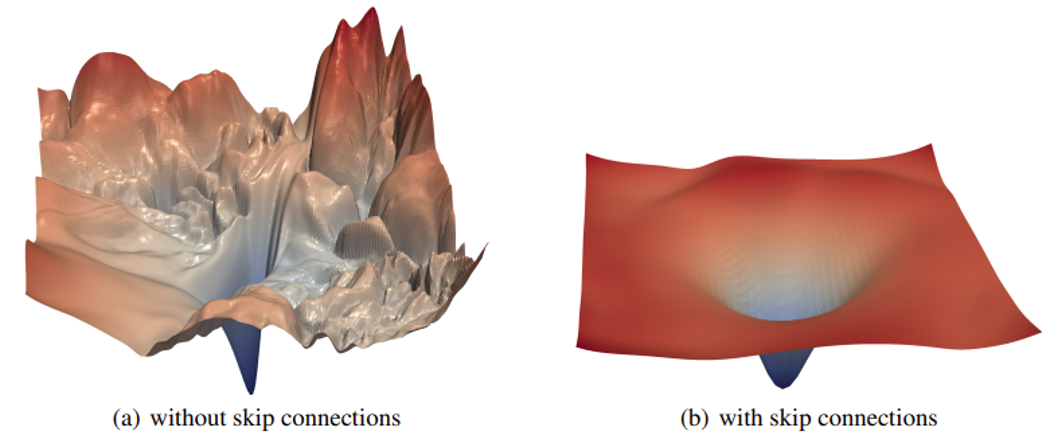
有了残差连接后,原本崎岖的误差曲面就会变得平滑,也就是说更容易优化了
-
RNN v.s. Attention⚓︎
那么 Transformer 架构,或者更准确地说,自注意(self-attention) 机制出现的理由是什么呢?在回答这个问题前,我们不妨先来看自注意机制的前辈和晚辈们:
- 前辈——RNN(循环神经网络 (recurrent neural network))
- 晚辈——Mamba 架构和它的兄弟们
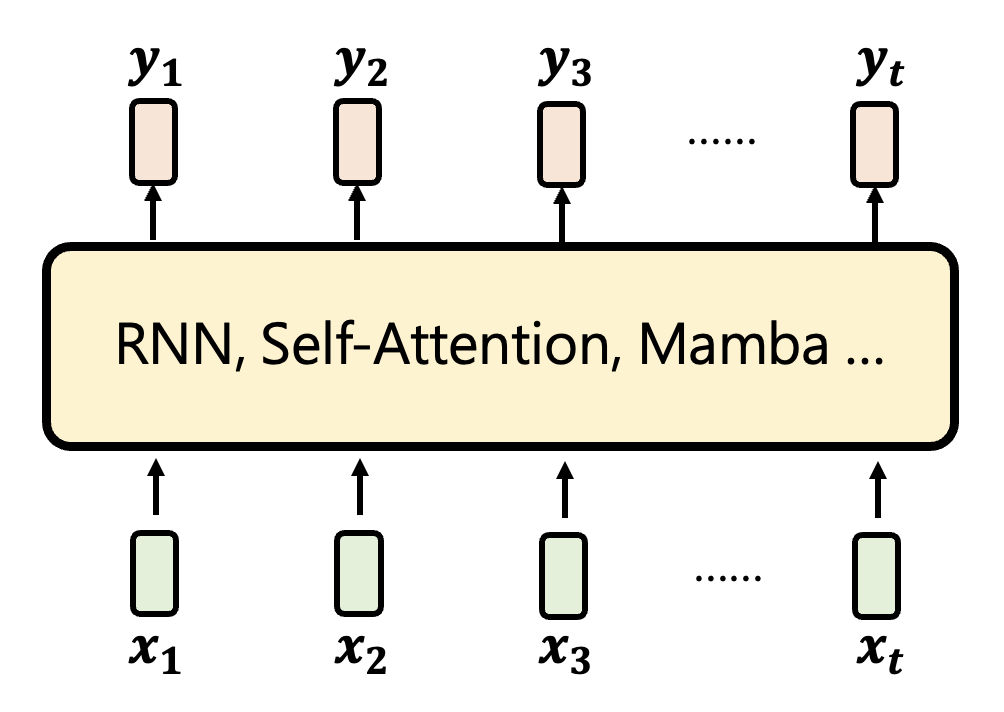
虽然它们的架构细节有不少差异,但是它们的共同目标都是给定一排向量的输入,输出另一排向量。
先来看 RNN 风格的架构的运作机制:有一个叫做隐藏状态(hidden state) 的模块,它把目前已知的输入混合起来并保存,并由它决定输出内容。
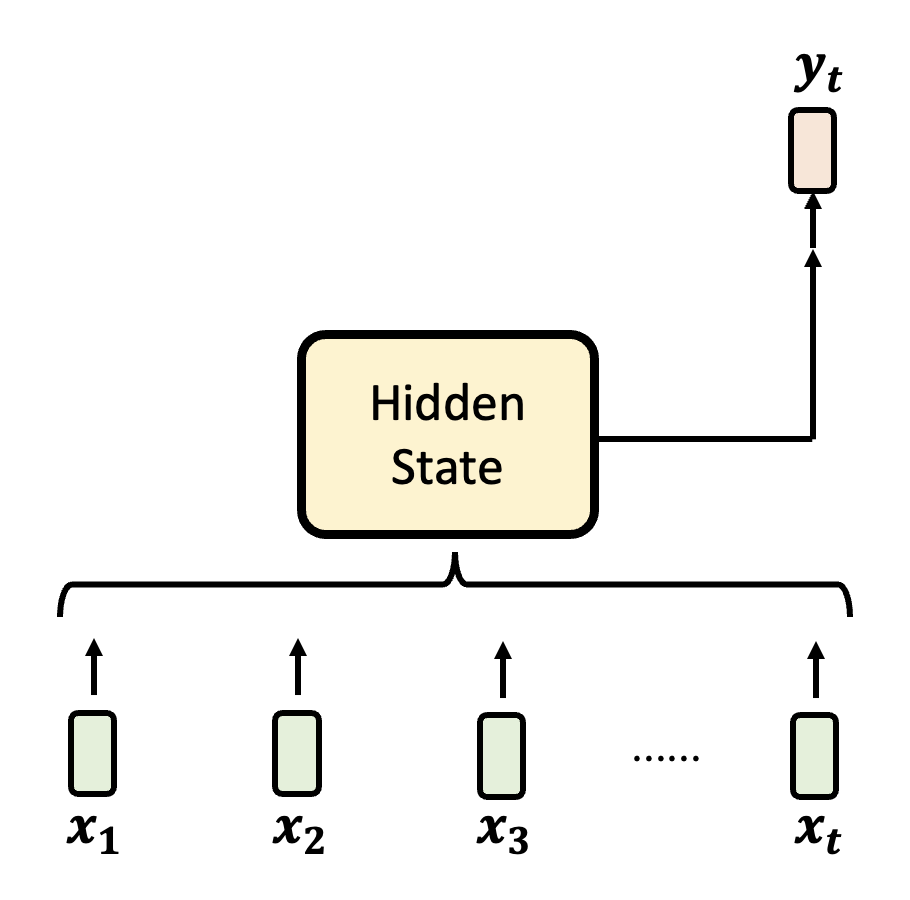
更详细地,RNN 风格架构的一般形式为:
其中 \(\bm{x_t}, \bm{y_t}\) 分别为第 \(t\) 个(或者说时间 \(t\))输入向量和输出向量。这么说还是太抽象了,所以下面展示了隐藏状态的“真面目”:
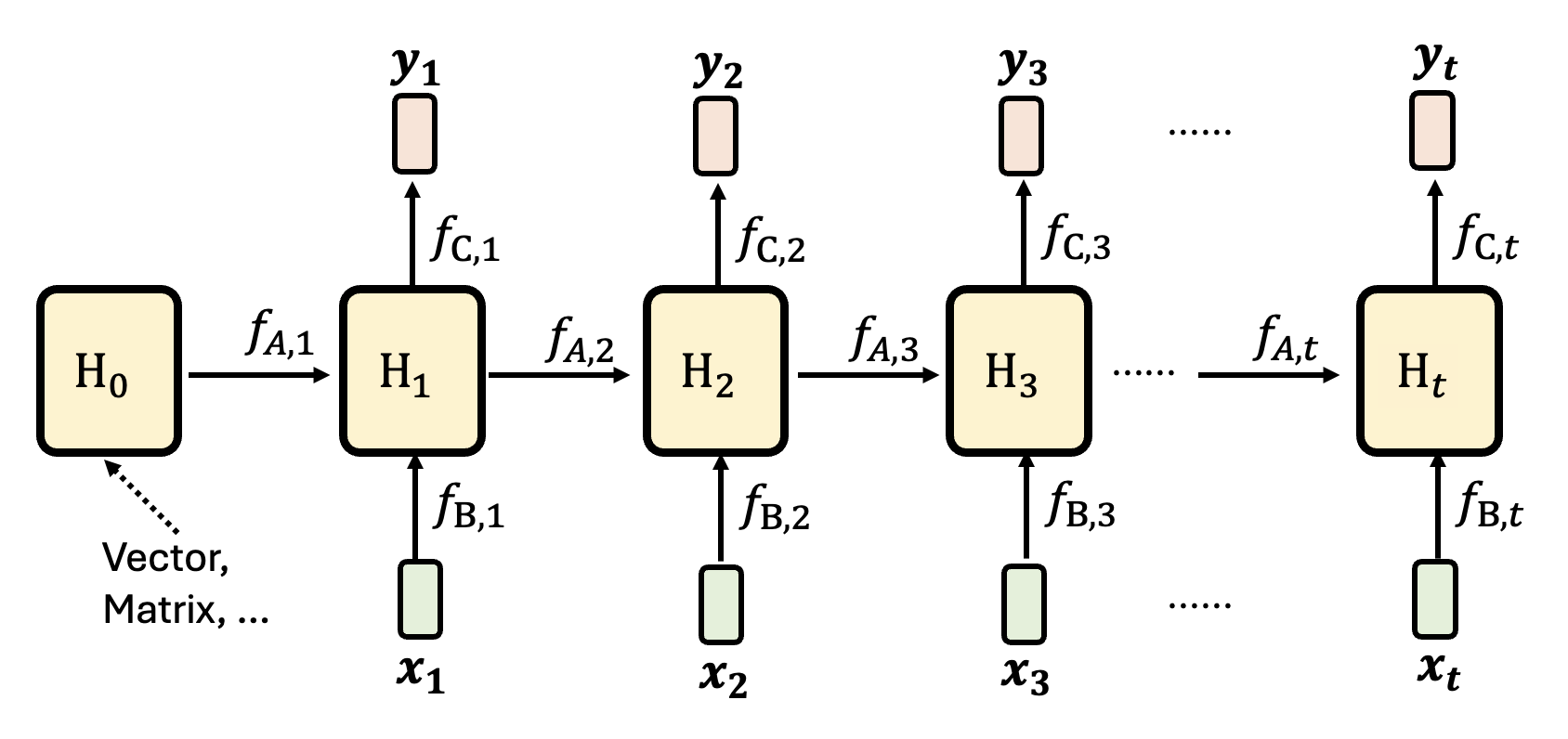
- \(H_0\) 既可以是向量(早期的 RNN 中 \(H\) 就是向量
) ,也可以是矩阵 - 由于每个位置的输入向量不同,因此位置 \(t\) 上的三个函数 \(f_{A, t}, f_{B, t}, f_{C, t}\) 由输入向量决定
- 比如 \(\bm{x_2}\) 是没有什么意义的输入,那么可以利用 $f_{B, t} $ 阻止 \(\bm{x_2}\) 的传入
-
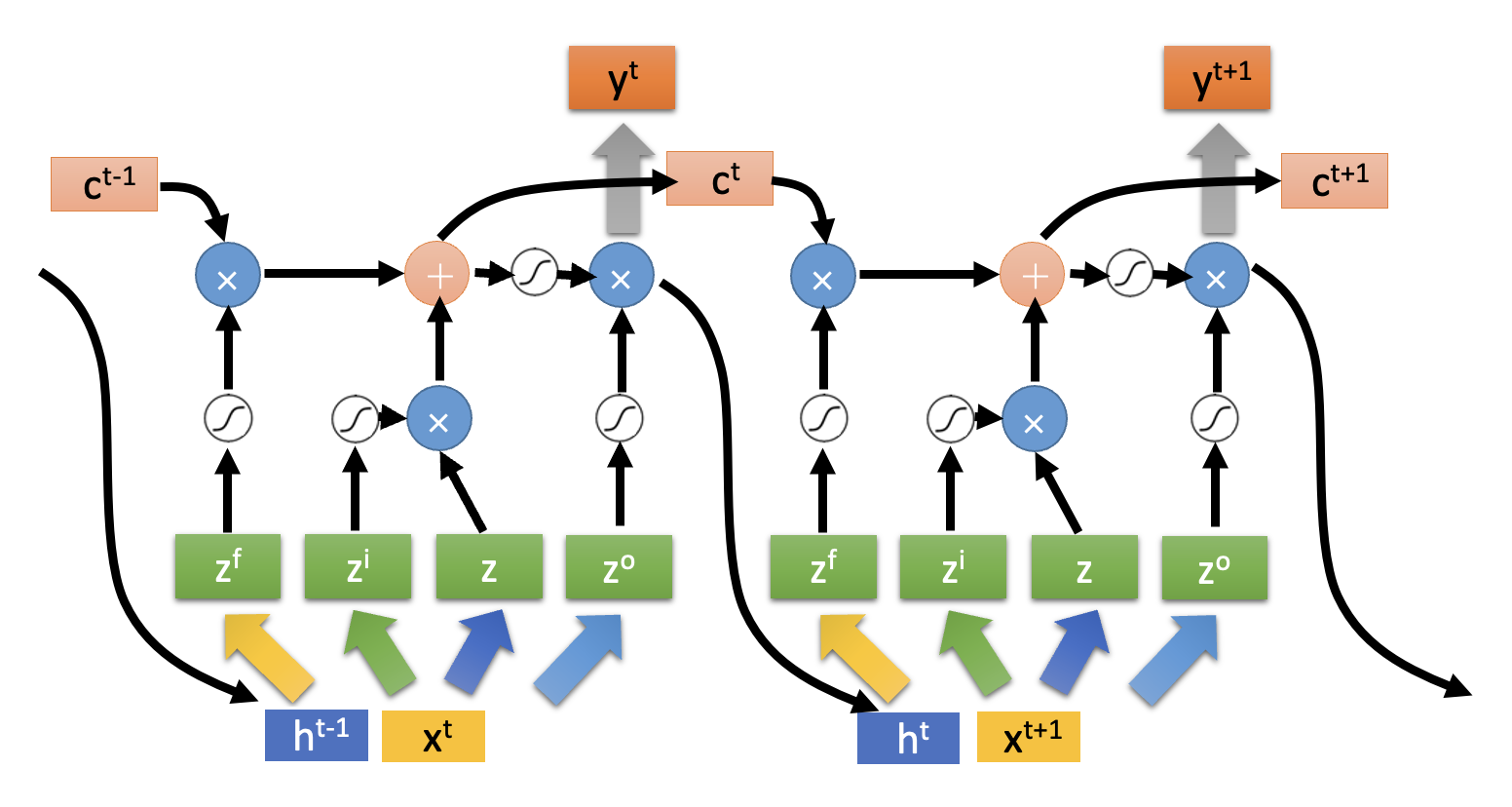
LSTM 也用到了这种技术
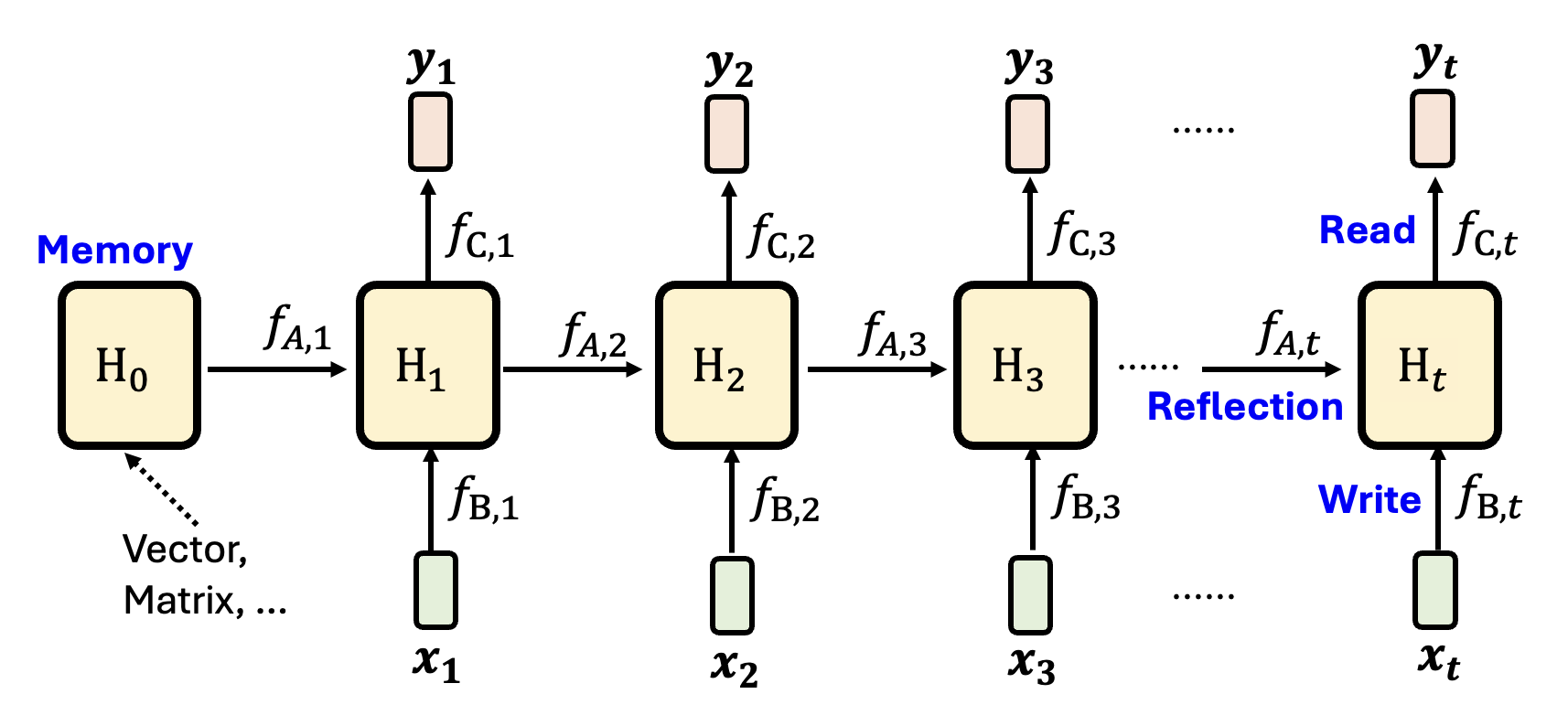
RNN 式的架构可用在当今流行的 AI 智能体上:
- \(H_0\):智能体的内存
- \(f_{A, t}\):反思模块,负责整理先前学过的知识
- \(f_{B, t}\):写模块,写入当前观察 \(\bm{x_t}\)
- \(f_{C, t}\):读模块,根据当前知识 \(H_t\) 做出行动 \(y_t\)
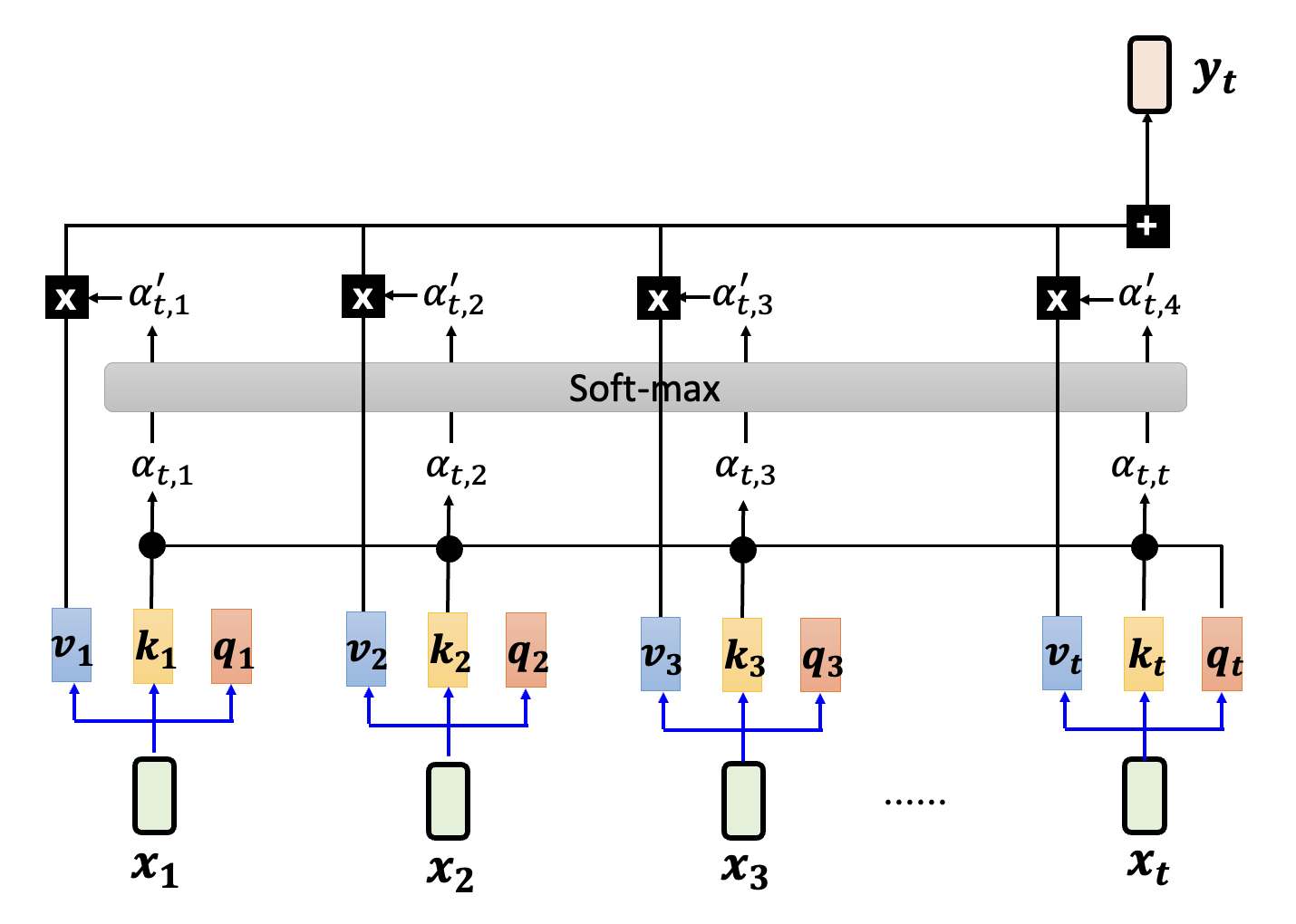
自注意式的架构如下所示。由于在《机器学习》一课中对此做过详细的解释,故此处不再赘述。
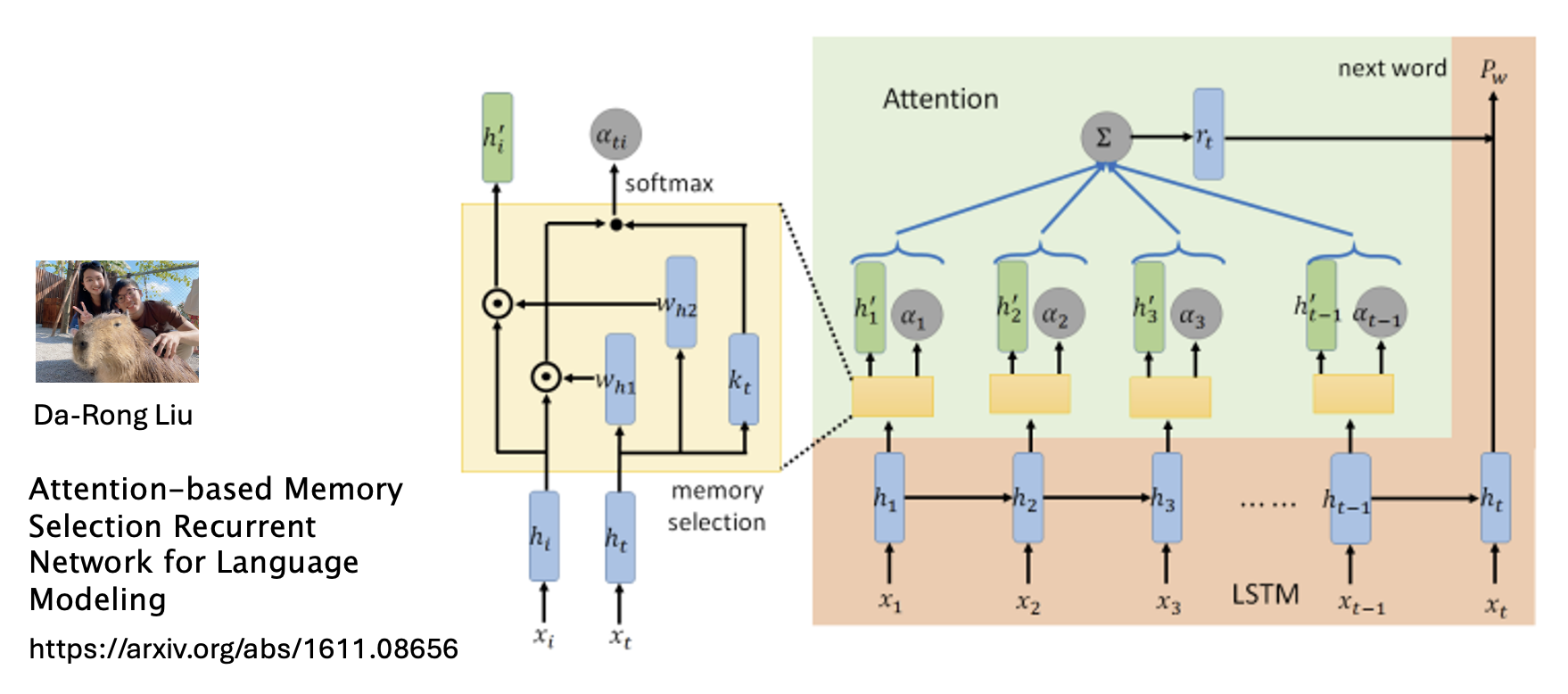
值得一提的是,注意机制并不是在 2017 年首次提出来的,早在 2014 年就有相关研究了:
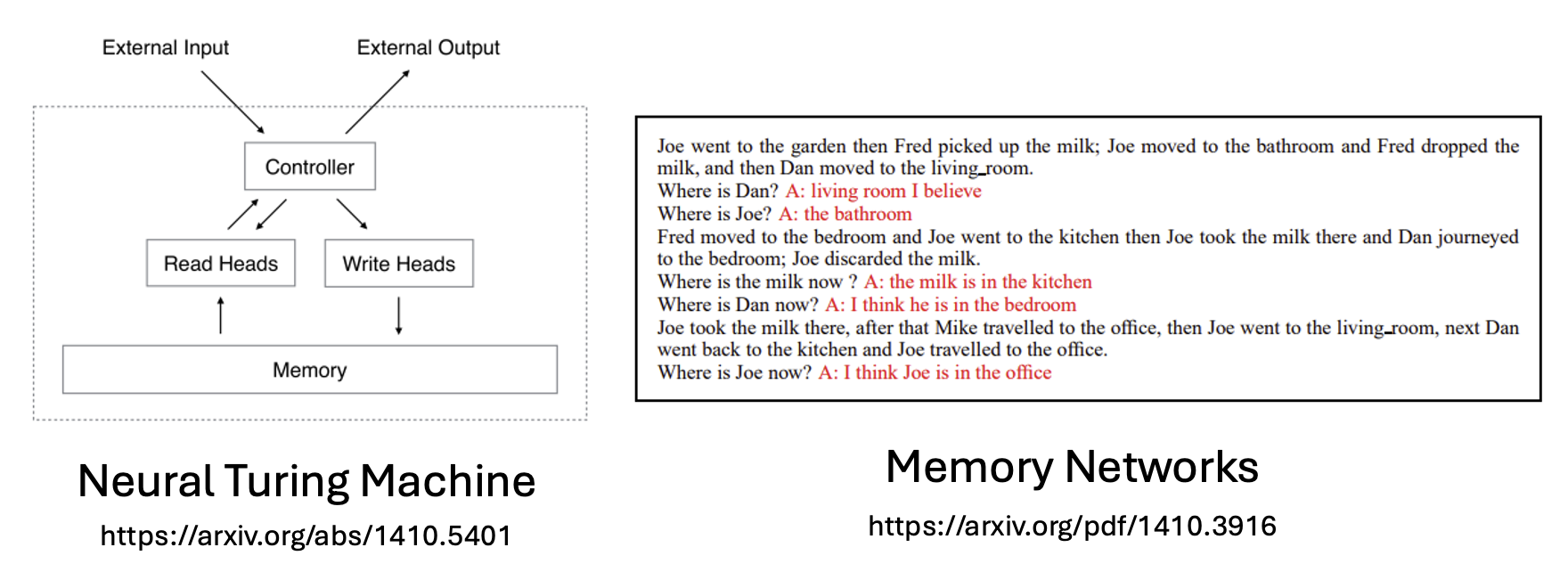
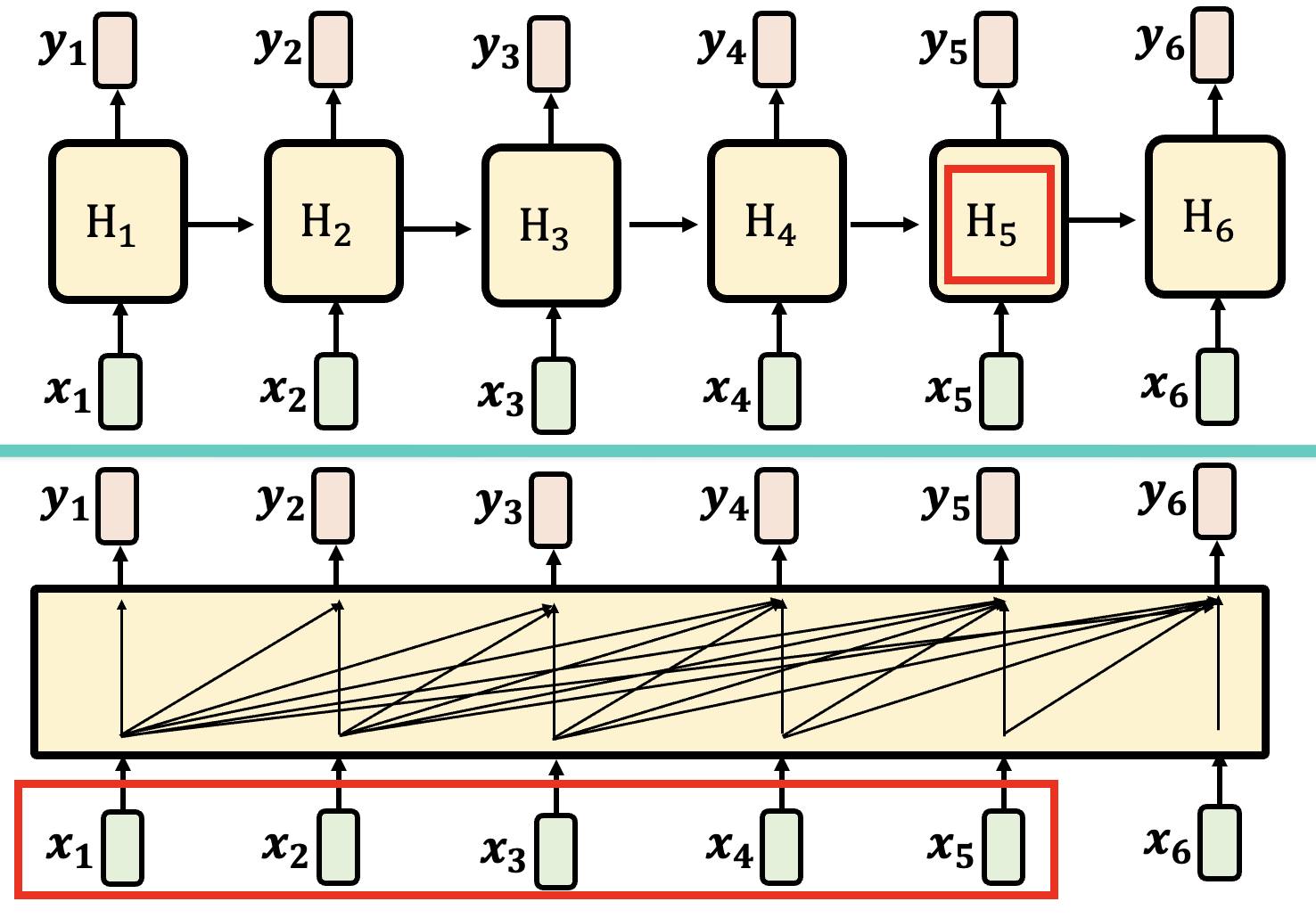
下图同时列出 RNN 和注意机制下的架构。通过对比,不难发现
- RNN 每一步的计算量都是一样的
- 而注意机制下,输入越长,计算量就会越大(一个输出的计算要顾及所有输入)
或许读者会反驳说“RNN 没法记住大量信息”,因为中间的 \(H\) 只是一个有限大小的向量或矩阵——这是一个常见的误区,事实上注意机制也没法保证能记住无限长的内容,之后会解释其中原因的。
这么看来,注意机制好像一无是处,那么它为什么会这么流行,几乎支配了整个深度学习的领域了呢?在 2017 年 Attention is All You Need 的文章中(注意并不是这篇文章发明了注意机制,它只是拿掉了注意机制之外的东西
如果知道注意机制背后的原理,读者就能明白:注意机制实际上做的是一系列的矩阵运算,而 GPU 最擅长的便是这个,所以注意机制式的架构更符合 GPU 的胃口。
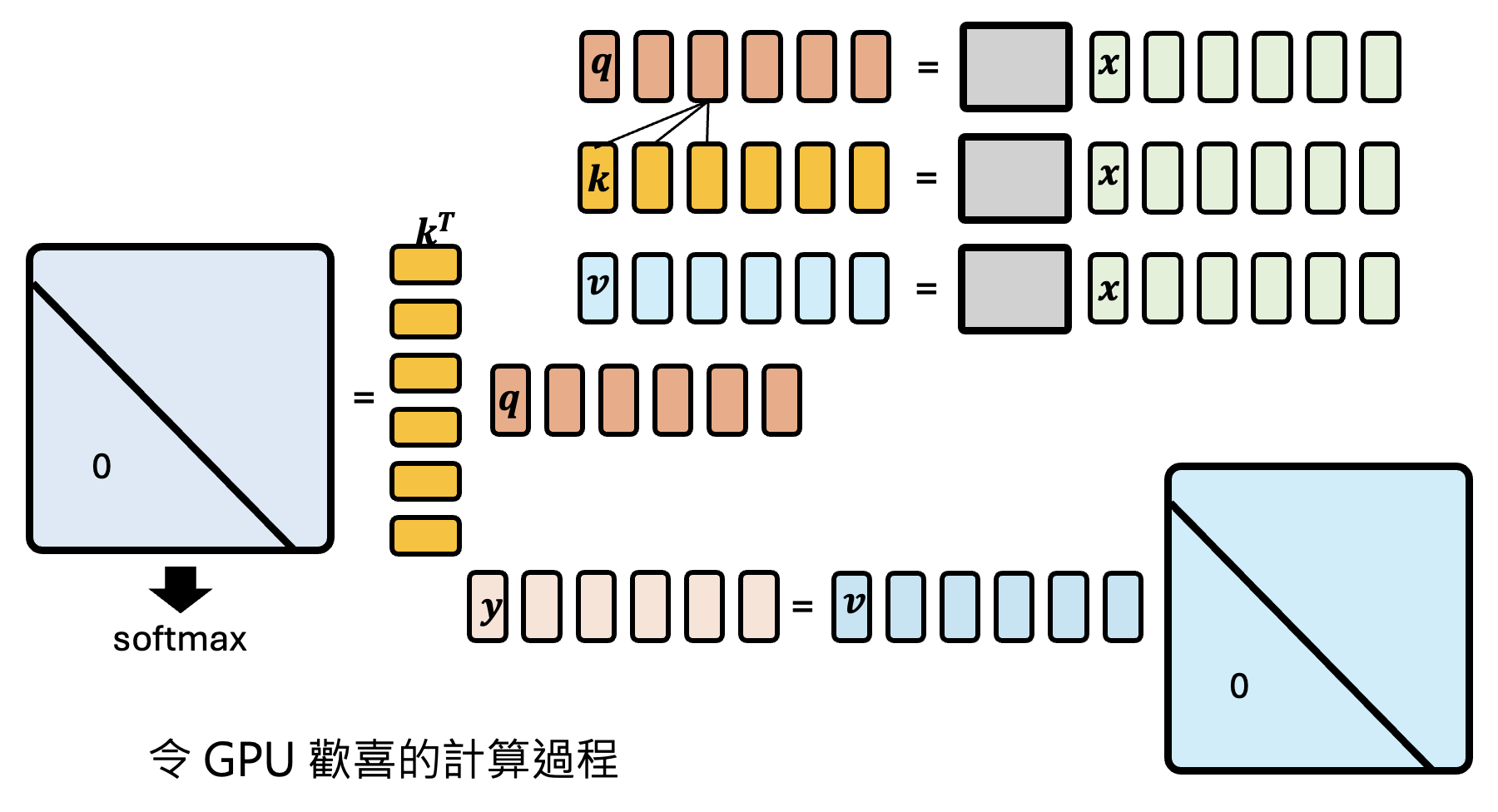
而 RNN 要等着一个个地读取输入并输出,中间的计算过程是串行的,所以无法利用 GPU 并行计算的优势了。
总结
| 自注意机制 | RNN | |
|---|---|---|
| 推理 | 计算量和内存需求随输入序列长度增加而增加 | 计算量和内存需求固定 |
| 训练 | 容易并行化 | 难以并行化( |
注意这里的问号,后面就会得到解答。
Linear Attention⚓︎
总结部分指出自注意机制不太善于应付长序列,但现状是:
- RAG,AI 智能体都需要语言模型处理很长的序列
- 多模态:图像、语音是比文本更长的序列
因此最近几年人们重新认识到 RNN 的好了,于是开始思考让 RNN 训练时并行计算的可能。考虑 RNN 的两个计算公式,列出 \(H_1, H_2, \dots, H_t\) 的表达式并展开,得到:
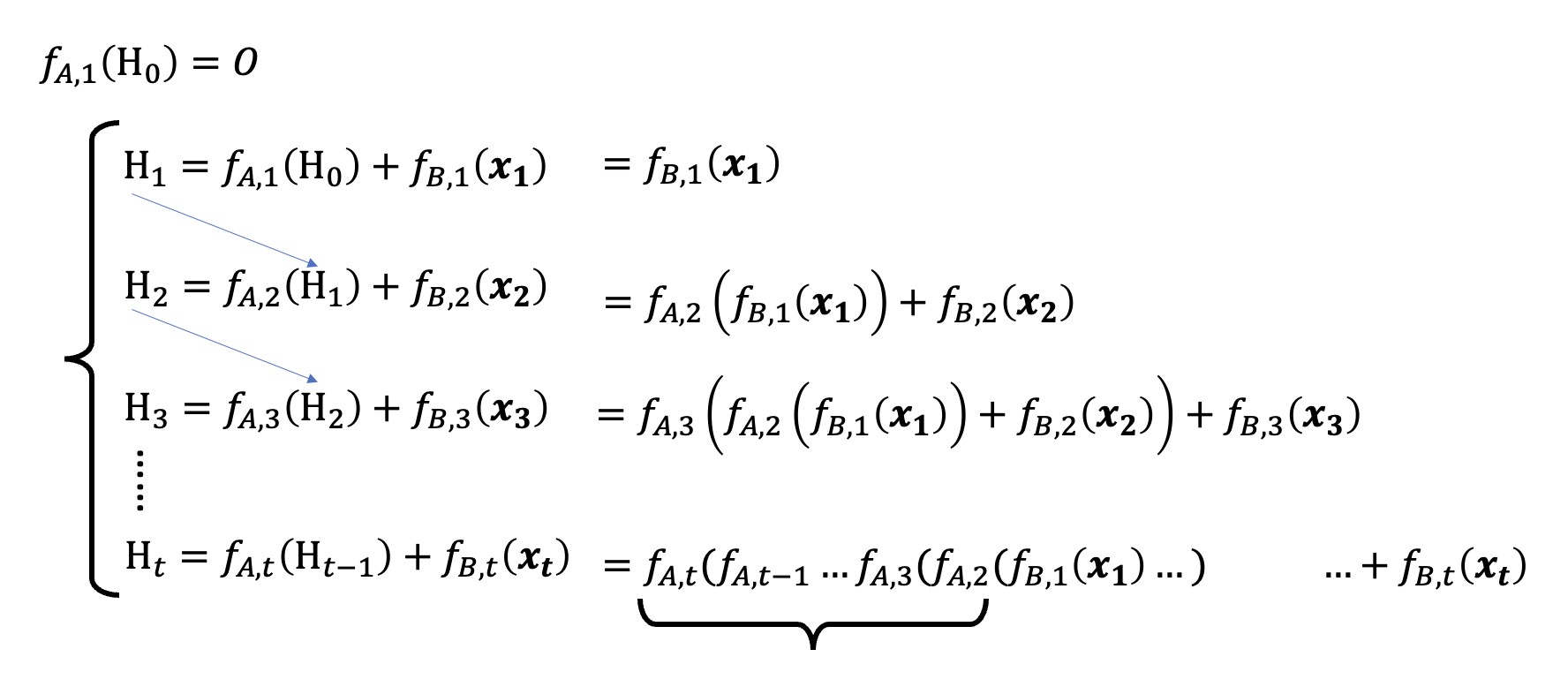
观察发现,展开后的式子会随着 \(t\) 的增加而更复杂,而导致这种复杂性的根源就是 \(f_{A, t}\) 的存在,所以尝试将 \(f_{A, t}\) 拿掉(原来的第一个等式就变成了 \(H_t = H_{t-1} + f_{B, t}(\bm{x_t})\)
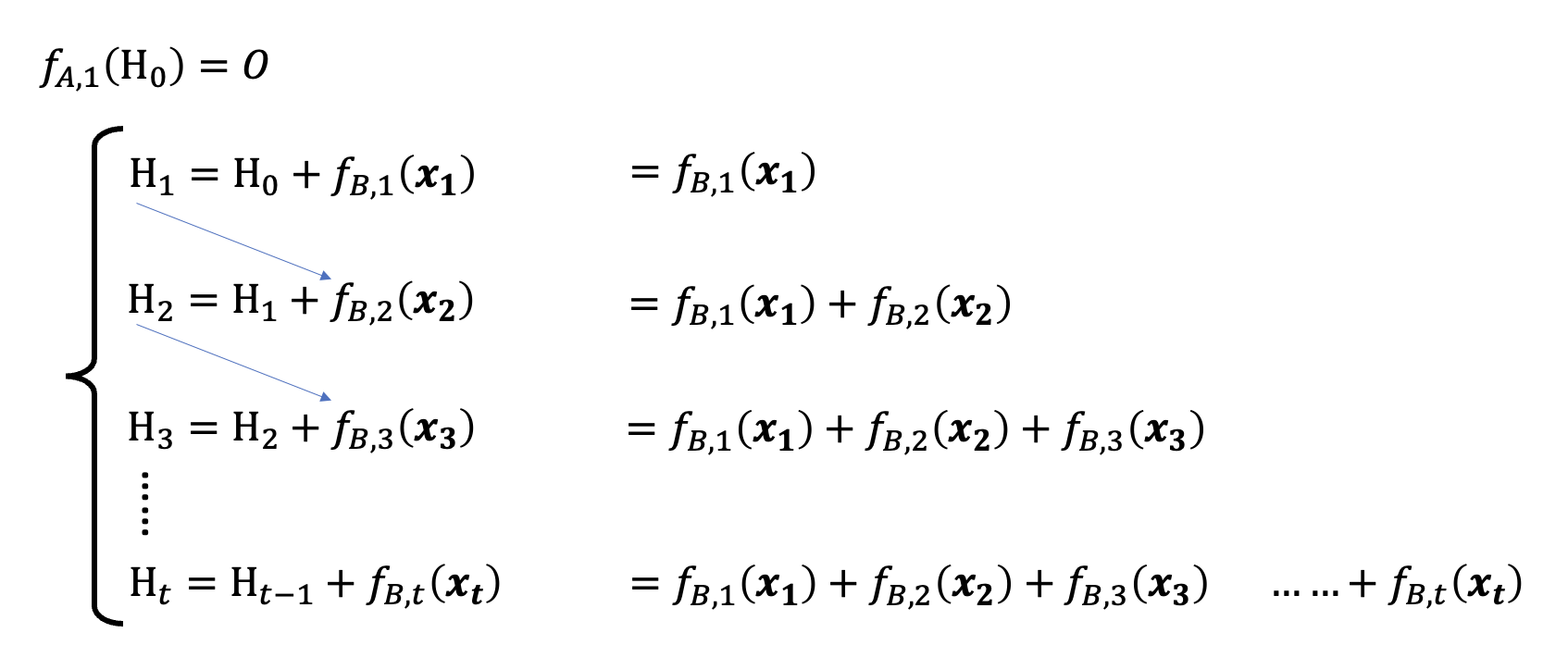
其中 \(H_t\) 是 \(d \times d\) 的矩阵。可以看到,式子变得相当简单,只剩下一些形如 \(f_{B, t}\) 的累加。为了简化表述,记 \(f_{B, t}(\bm{x_t}) = D_t\),可得到:
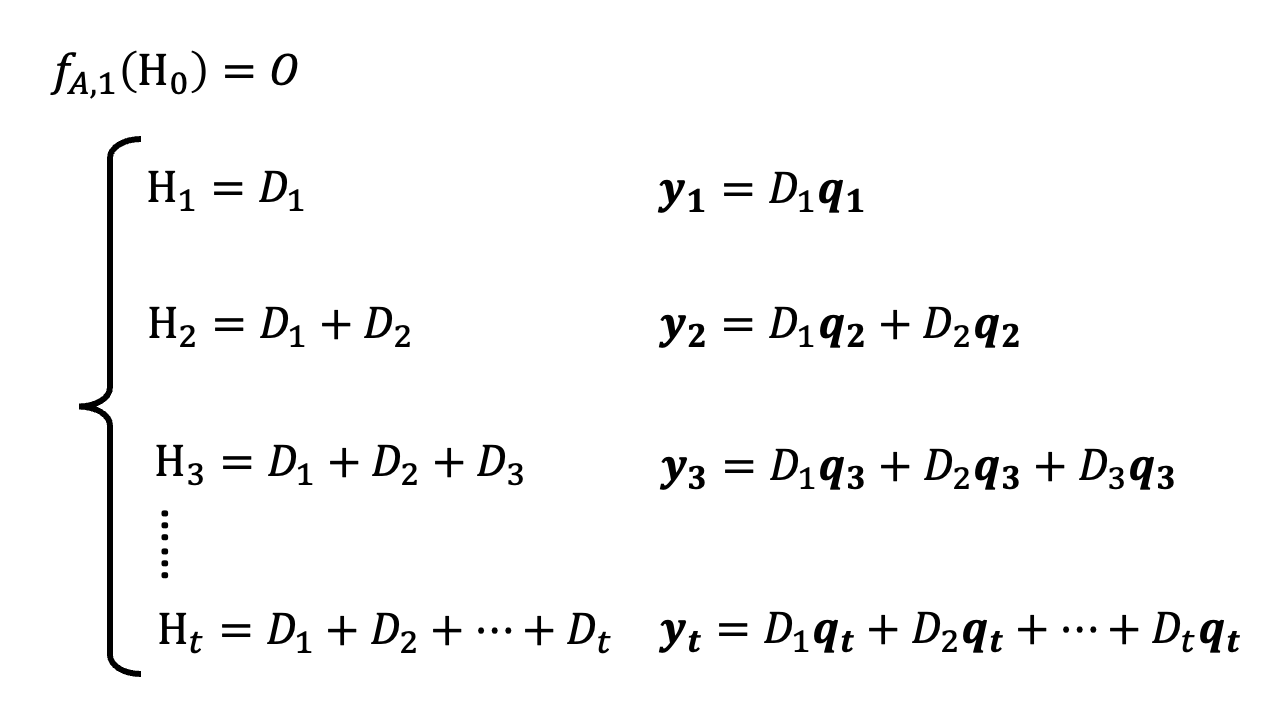
接着,我们假设 \(f_{C, t}(H_t) = H_t \bm{q_t}\),其中 \(d\) 维向量 \(\bm{q_t} = W_Q \bm{x_t}\)。所以就有了前面关于 \(\bm{y_t}\) 的等式。
最后,令 \(D_t = \bm{v_t} \bm{k_t}^T\),其中 \(\bm{v_t} = W_v \bm{x_t}, \bm{k_t} = W_k \bm{x_t}\)(前者是 \(d'\) 维向量,后者是 \(d\) 维向量
WOW,这好像就是在做自注意计算啊——没错,除了少了 softmax 的计算外,几乎没有什么区别。我们称这个技术为线性注意力(linear attention)。下面同时列出 RNN 和线性注意力的结构图,发现它们的差异就在 \(f_{A, t}\),即反思模块的存在。
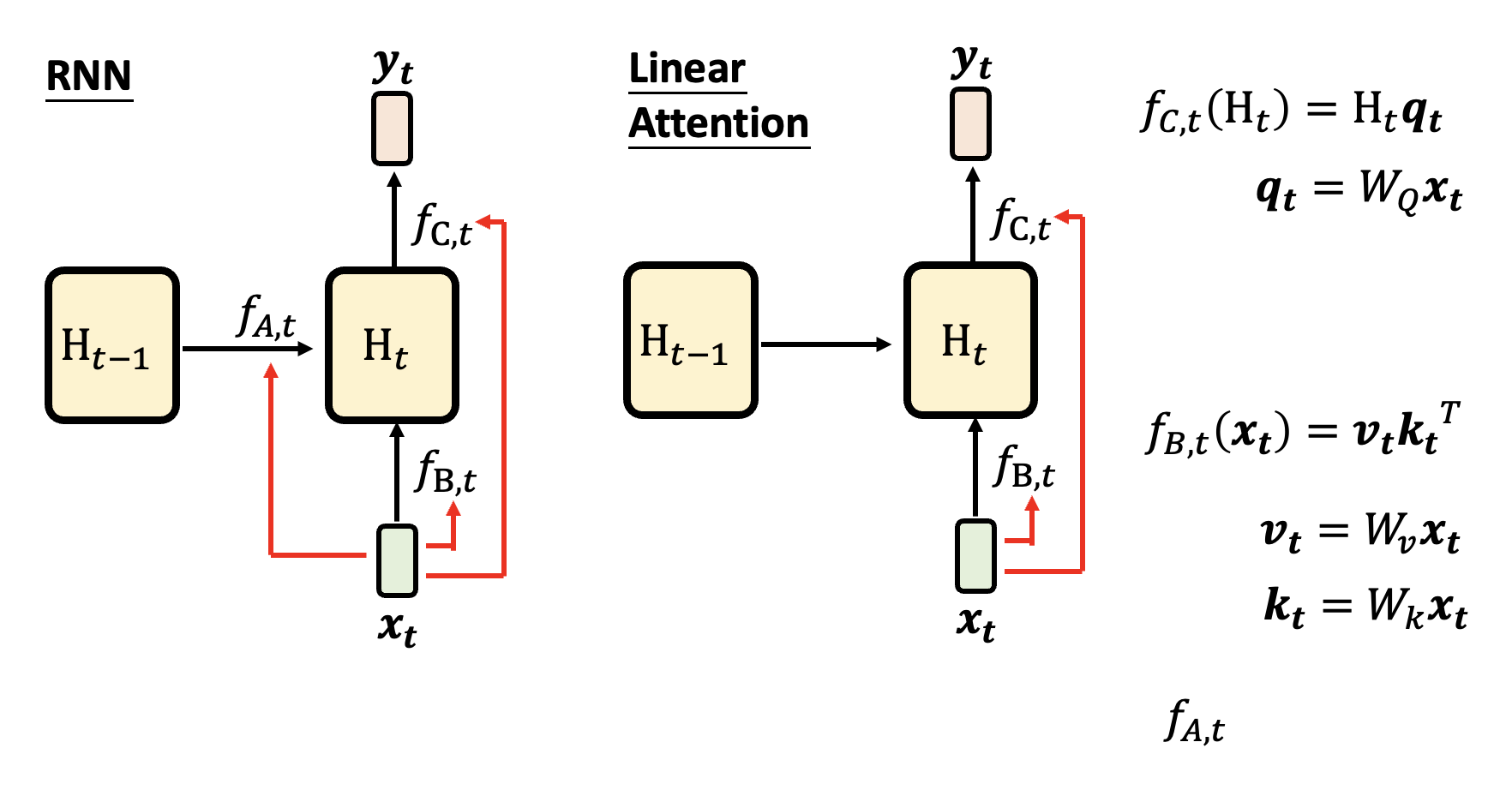
在线性注意力中,训练的时候就像自注意机制,而推理的时候又好像 RNN。
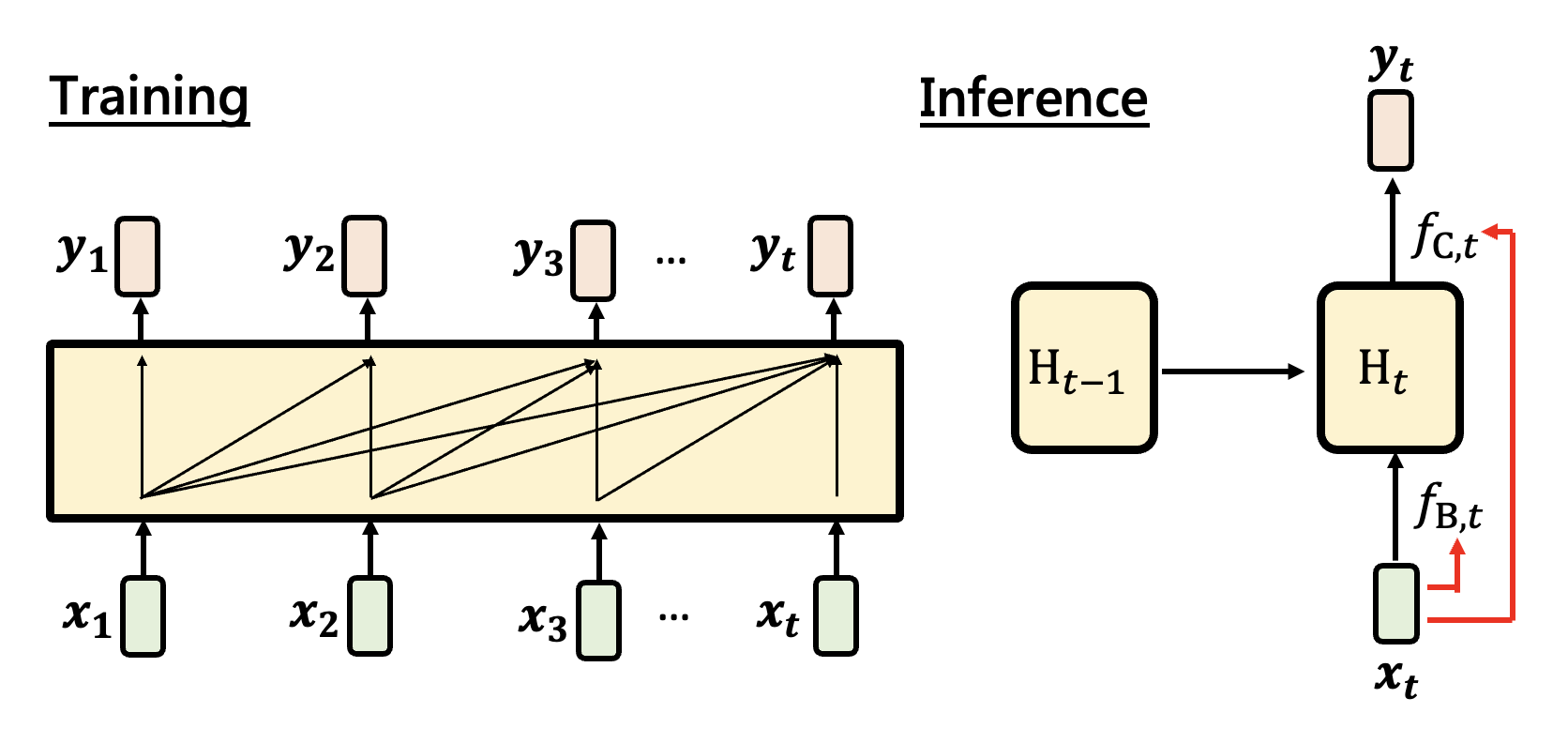
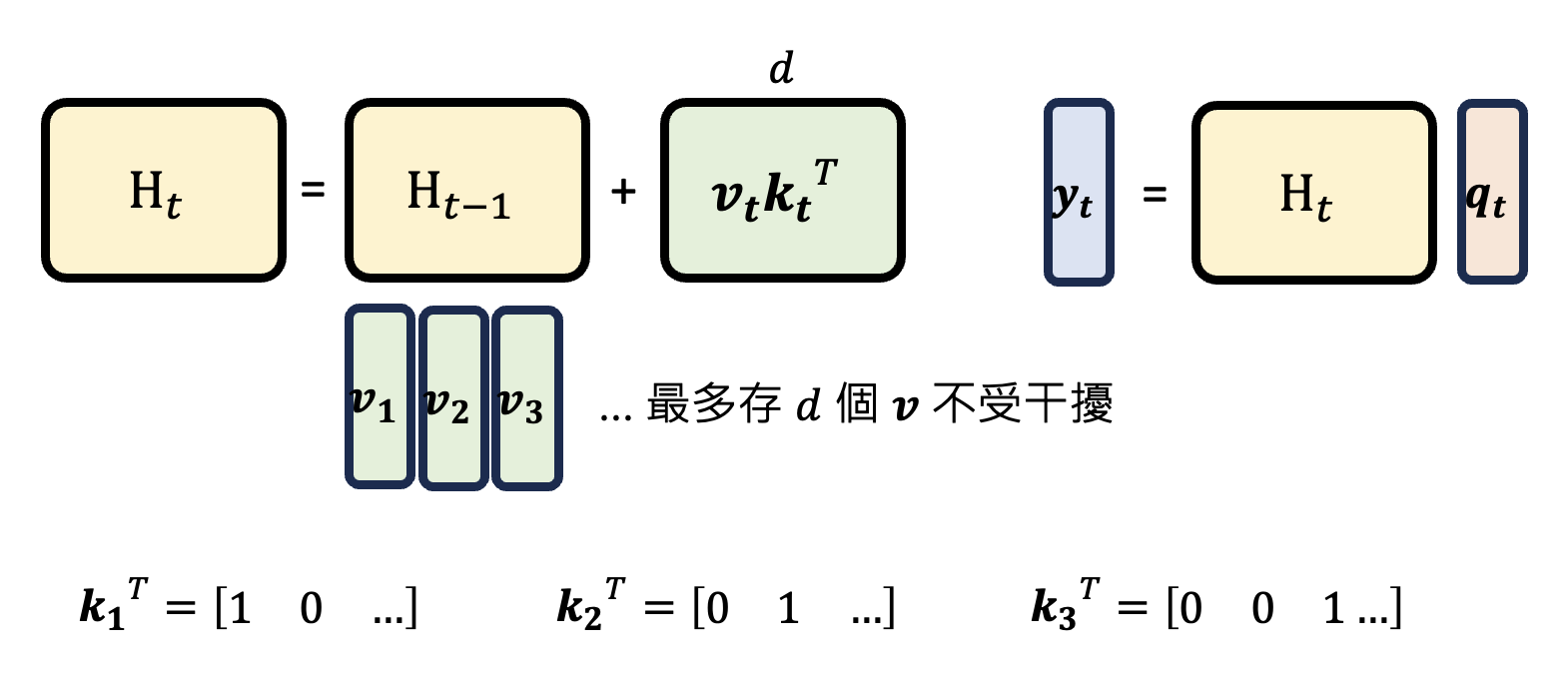
用图形表示 \(H_t = H_{t-1} + f_{B, t}(\bm{x_t})\) 的计算过程:
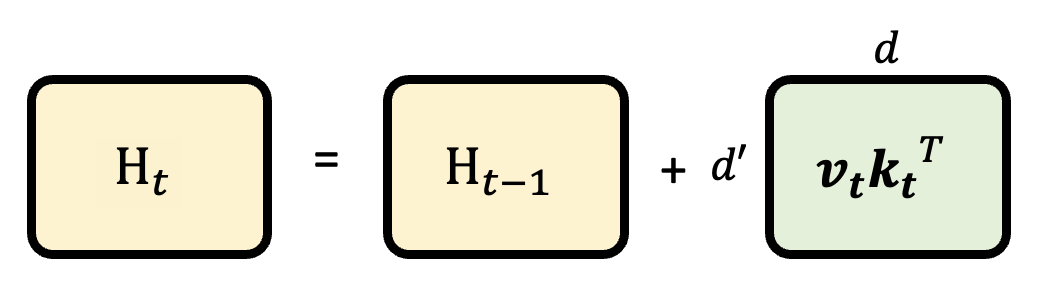
展开表示 \(\bm{v_t} \bm{k_t}^T\):
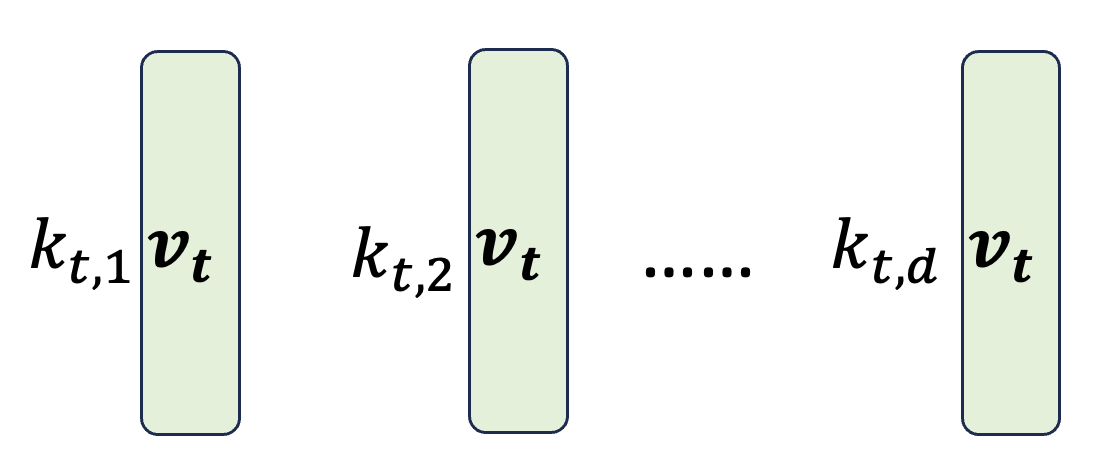
其中 \(\bm{v_t}\) 是要被写入内存的信息。如果想把 \(\bm{v_t}\) 写入 \(H\) 的第 2 列,那就让 \(k_{t, 2} = 1\),其余 \(k\) 均置 0。
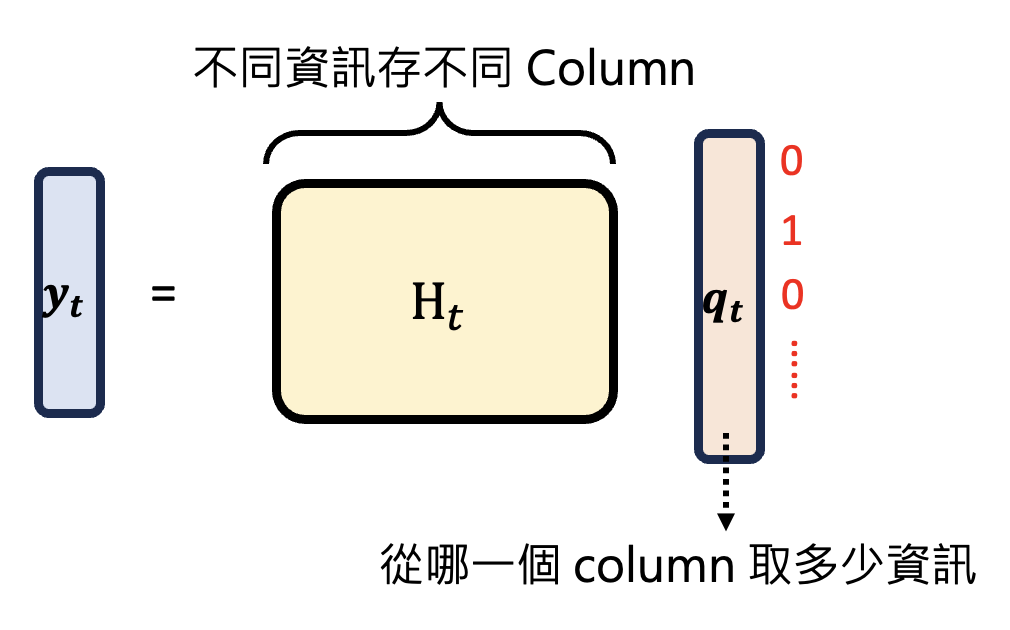
接着用图形化的方式表示 \(\bm{y_t} = f_{C, t}(H_t) = H_t \bm{q_t}\)
- \(H_t\) 的每一列存有不同的信息
- \(\bm{q_t}\) 表示从哪一列获取信息
其实线性注意力也不是什么新的想法——早在 2020 年的一篇论文(Transformers are RNNs: Fast Autoregressive Transformers with Linear Attention)就提到了 Transformer 和 RNN 就差一个 softmax。
Retention⚓︎
一种对 RNN(线性注意力)的流行度远不如 Transformer(带 softmax 的自注意)的解释是前者记忆有限,而后者有无限的记忆。
-
RNN 记忆有限是很直观的想法,因为 \(H\) 是一个 \(d \times d\) 的矩阵,每一列代表不同信息,那么最多只能记 \(d\) 个信息
- 观察线性注意力的式子 \(H_t = H_{t-1} + f_{B, t}(\bm{x_t})\),发现前一个 \(H\) 的记录会完整的传给当前的 \(H\),因此记忆不会发生改变
-
但 Transformer 并不是像大众所想的那样有无限的记忆力。假设向量 \(\bm{v}, \bm{q}, \bm{k}\) 都是 \(d\) 维的
-
\(t \le d\):没有问题
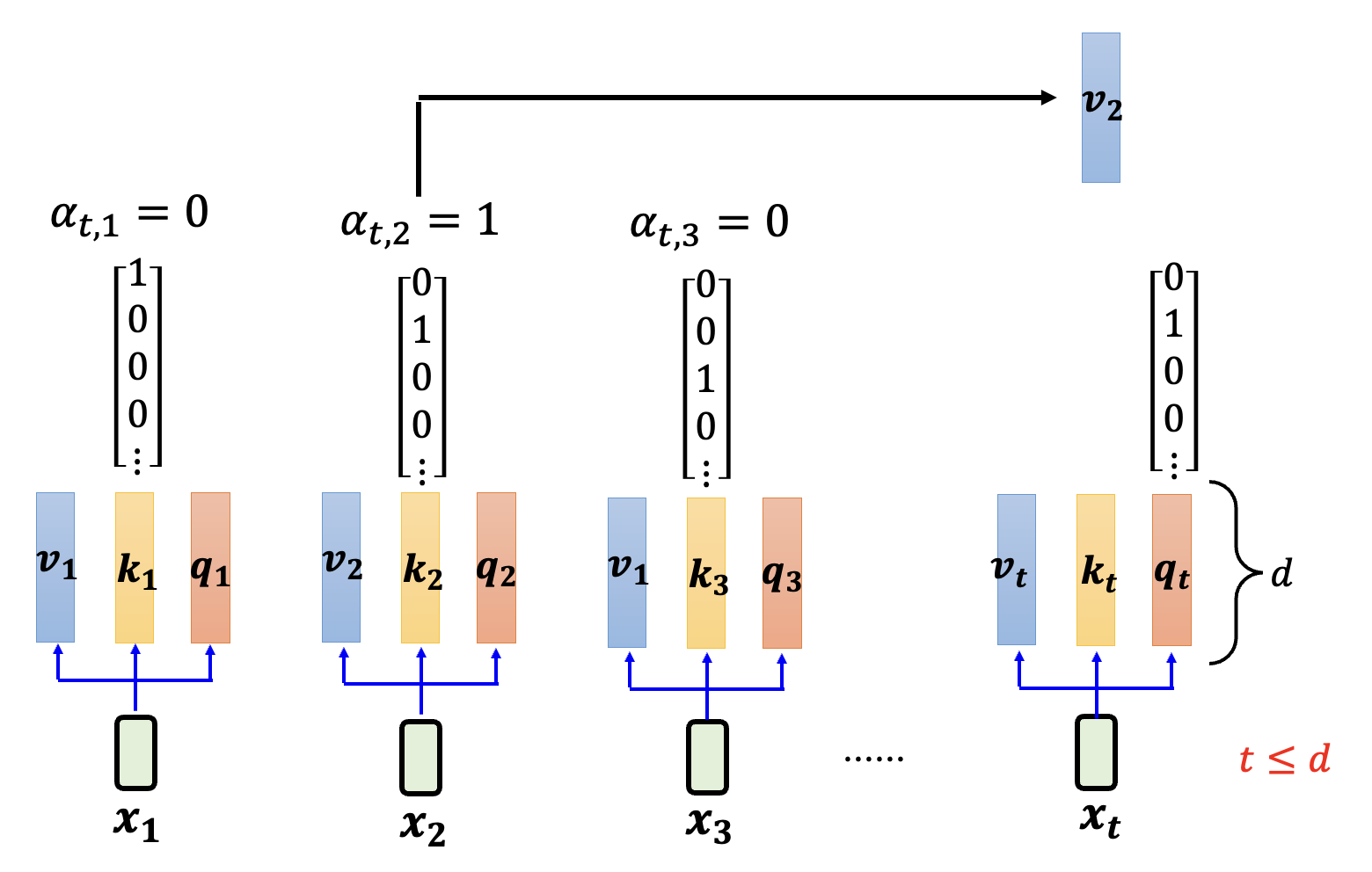
-
\(t > d\):计算关于第 \(t\) 个输入的注意分数时,由于键 \(\bm{k}\) 容不下关于 \(t > d\) 的输入元素,所以得到的注意分数会始终大于 0,但下图所示的查询 \(\bm{q_t}\) 只想要“查询”第 2 个输入,因此记忆开始错乱
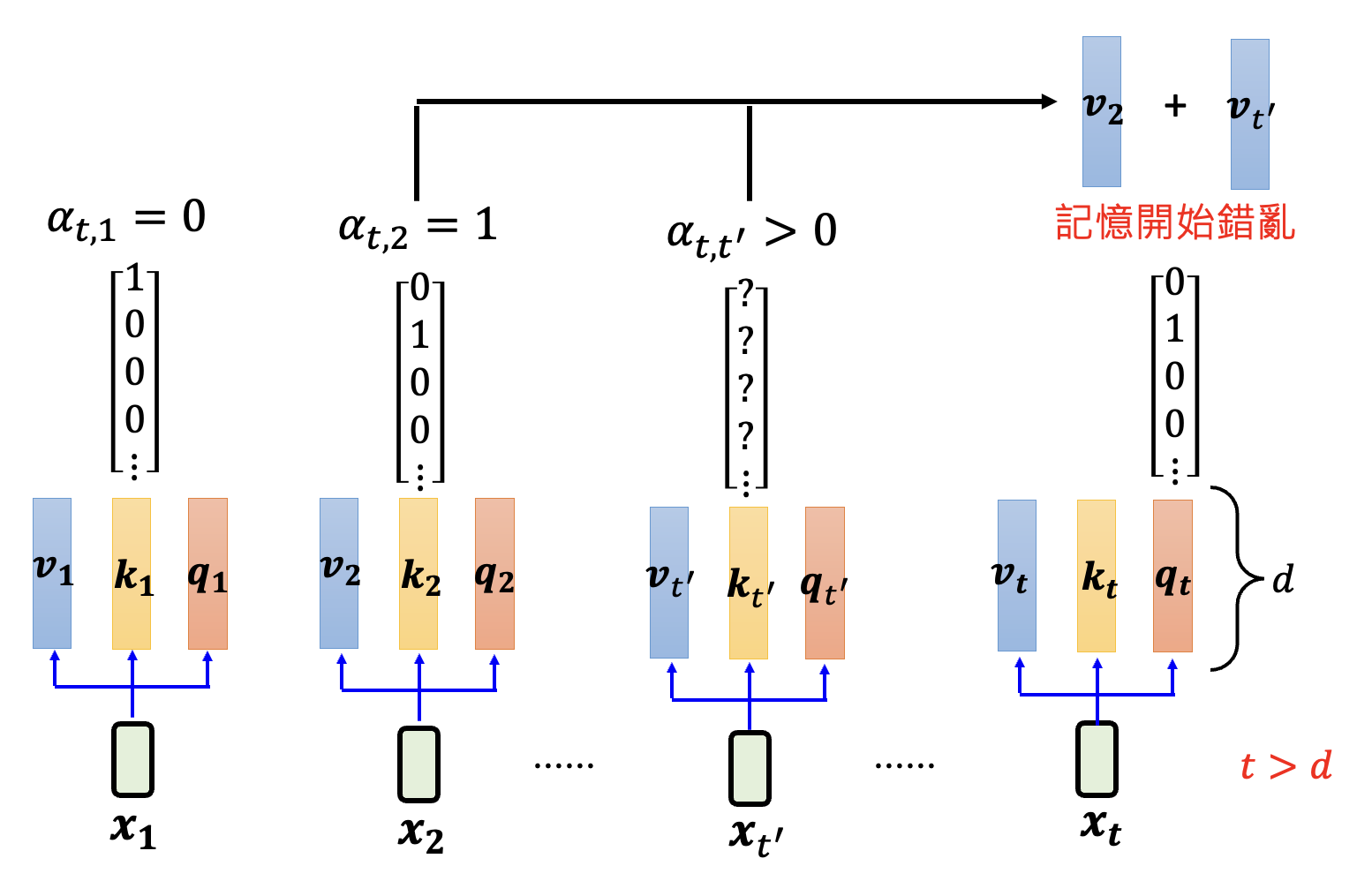
-
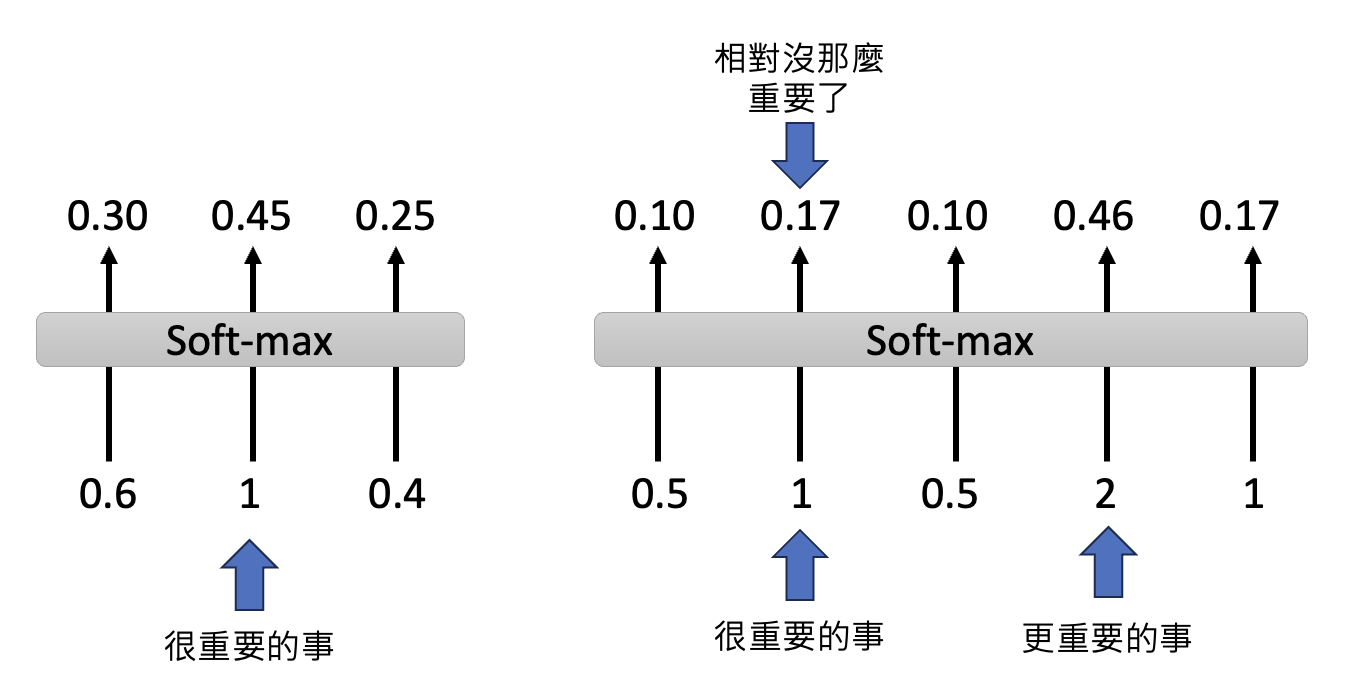
综上,是 softmax 改变了模型的记忆。一种通俗的解释如下图所示——从左图到右图,原本重要的第 2 个输入被后面更重要的输入所影响,softmax 后的分数显著下降,对模型而言就显得不是很重要了。
其实“记忆不变”并不是好事(不然线性注意力就能顶替掉自注意力了
-
ResNet:相比线性注意力,仅改变第一个式子:\(H_t = \textcolor{red}{\gamma} H_{t-1} + \bm{v_t} \bm{k_t}^T\),可以让模型做到逐渐遗忘
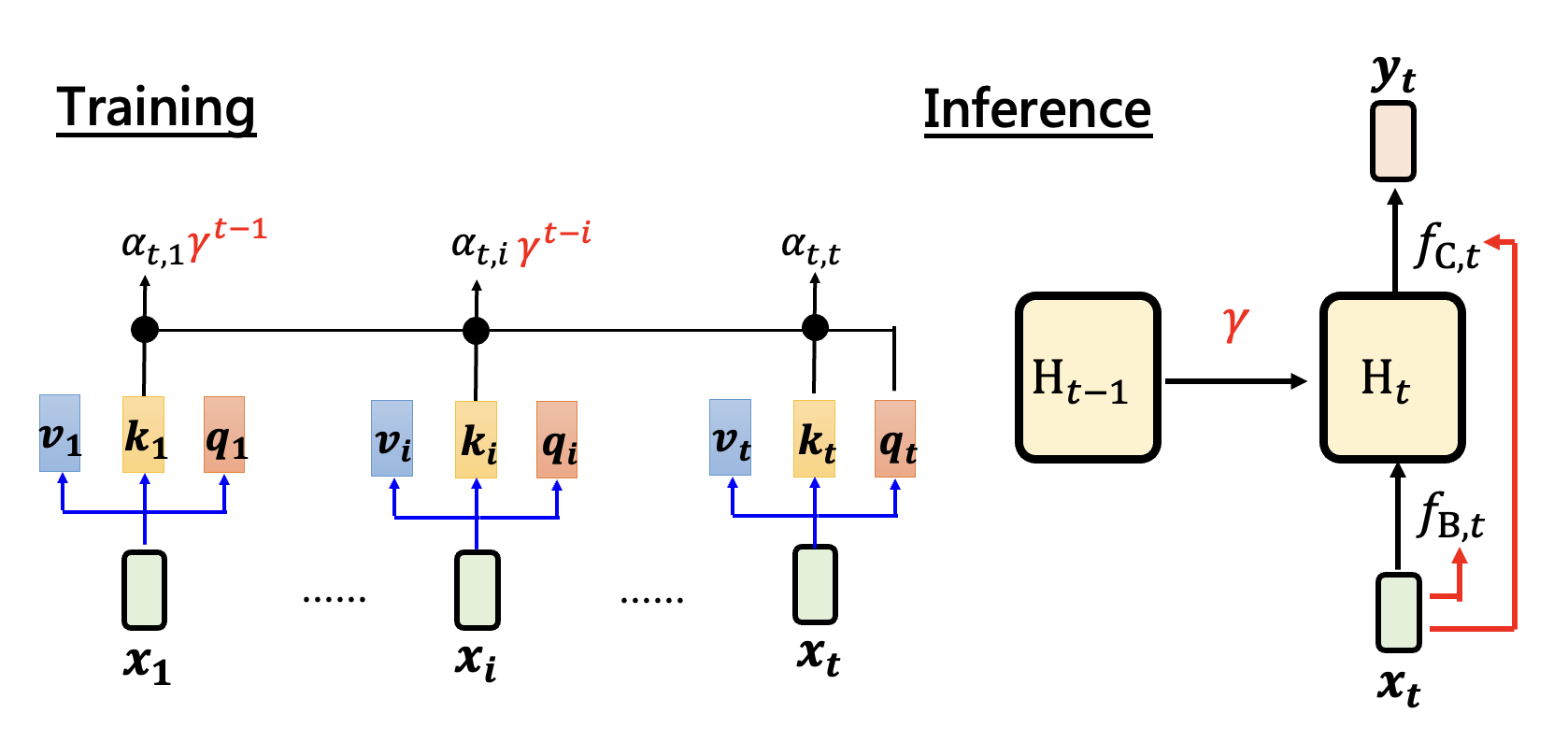
-
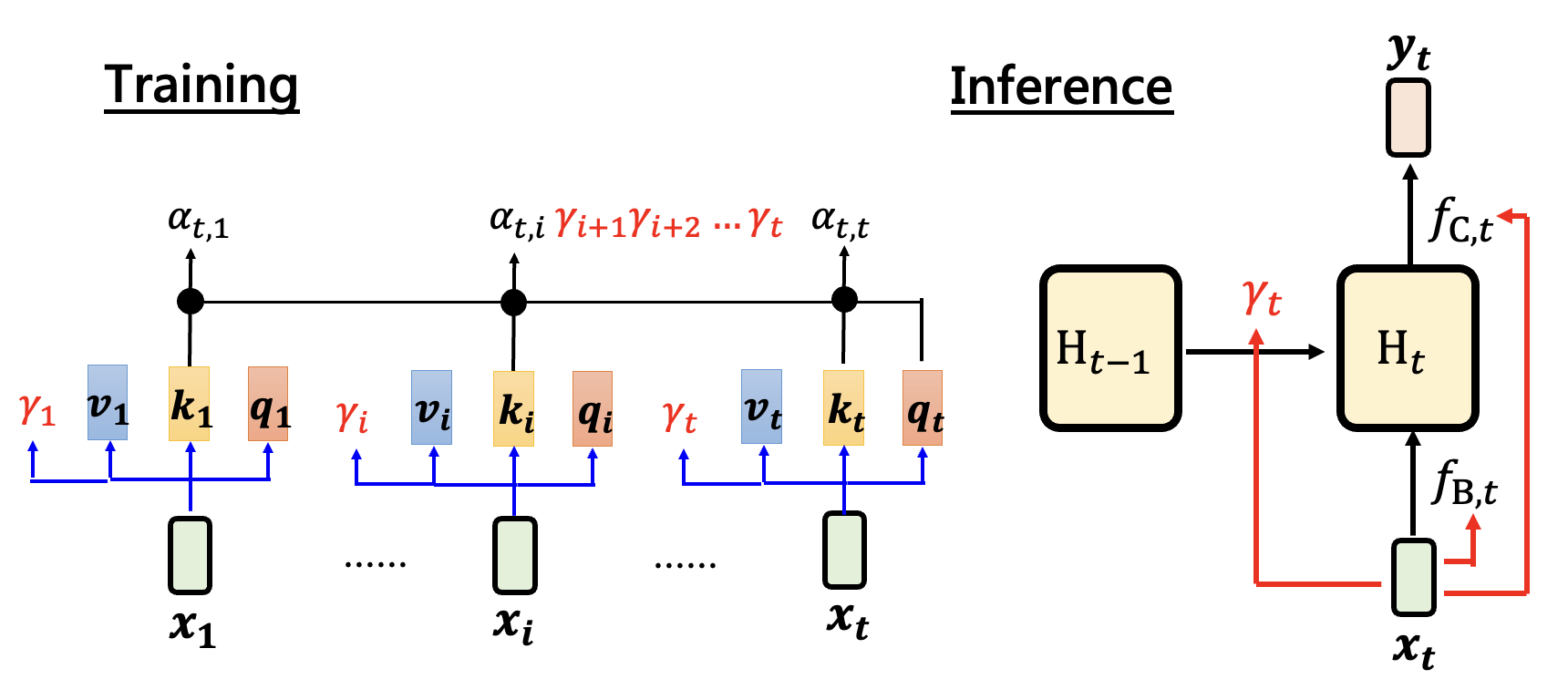
门控保留 (Gated Retention):在 ResNet 的基础上,让 \(\gamma\) 随时间变化而变化,即 \(H_t = \textcolor{red}{\gamma_t} H_{t-1} + \bm{v_t} \bm{k_t}^T (\textcolor{red}{\gamma_t} = sigmoid(W_\gamma \bm{x_t}))\),从而做到选择性的遗忘
-
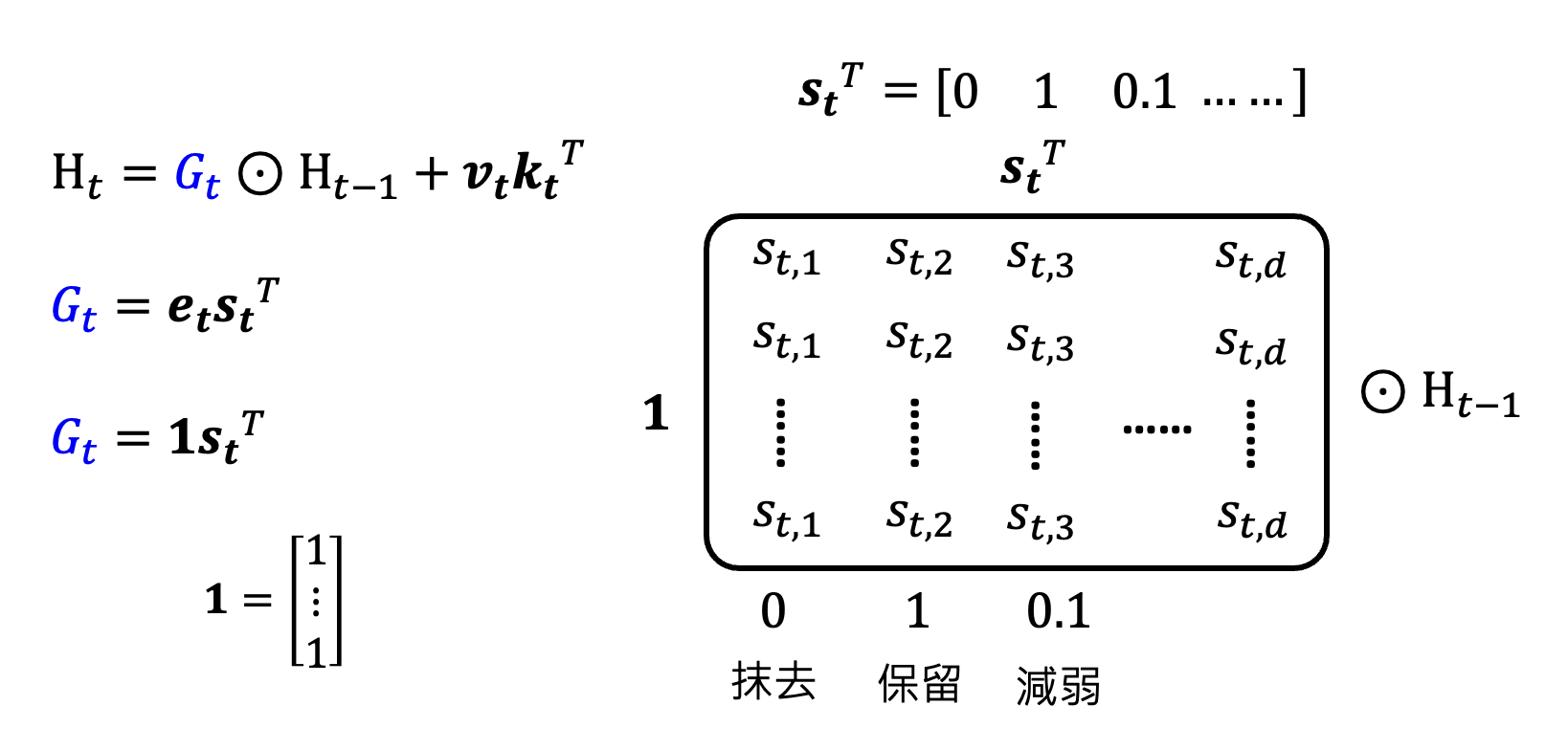
更复杂的保留:用矩阵 \(G_t\) 替代 \(\gamma\),和 \(H_{t-1}\) 做按元素 (element-wise) 的相乘,即 \(H_t = \textcolor{cornflowerblue}{G_t} \odot H_{t-1} + \bm{v_t} \bm{k_t}^T\),从而操控 \(H\) 中每个元素是否要被记忆
- 如果 \(G_t\) 没有特意设计过,就没法转化为原来的样子了(
? ) ,这样的话用 GPU 加速就会产生问题 - 一个结论是,当 \(G_t\) 能被写成 \(G_t = \bm{e_t} \bm{s_t}^T\) 的形式
- 后来有人通过实践发现,可以直接将 \(\bm{e_t}\) 的每个元素都置 1(即 \(\bm{1} = [1\ 1\ \dots\ 1]^T\)
) ,结果和用学出来的 \(\bm{e_t}\) 计算比也没什么差距
- 如果 \(G_t\) 没有特意设计过,就没法转化为原来的样子了(
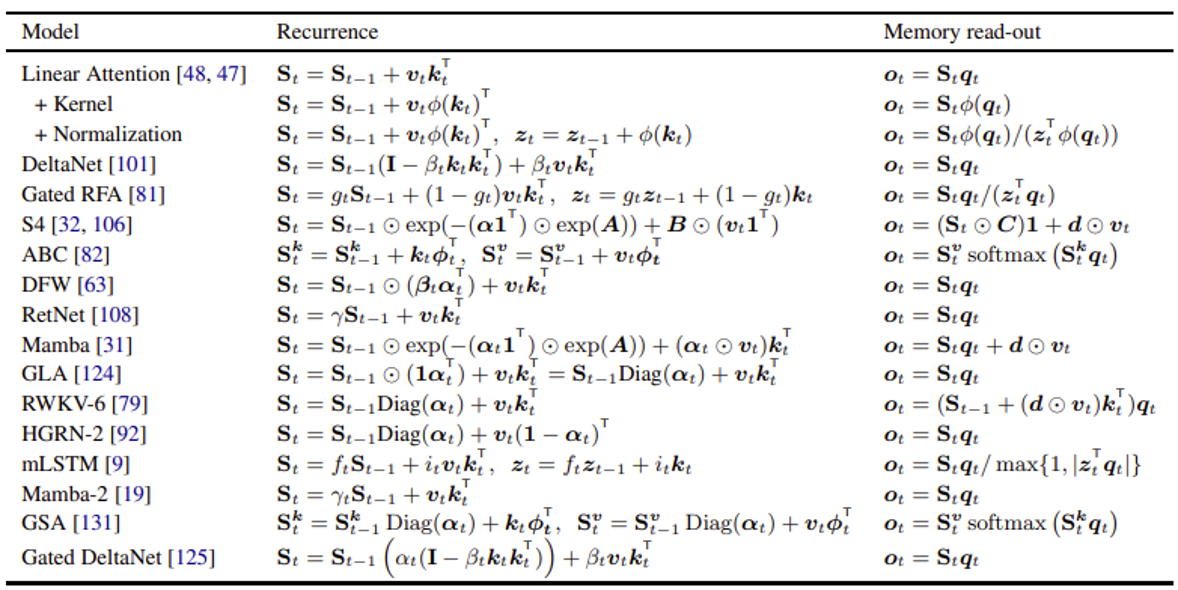
更多的变形请见这篇论文,下面给出了一张总结的表格:
Mamba⚓︎
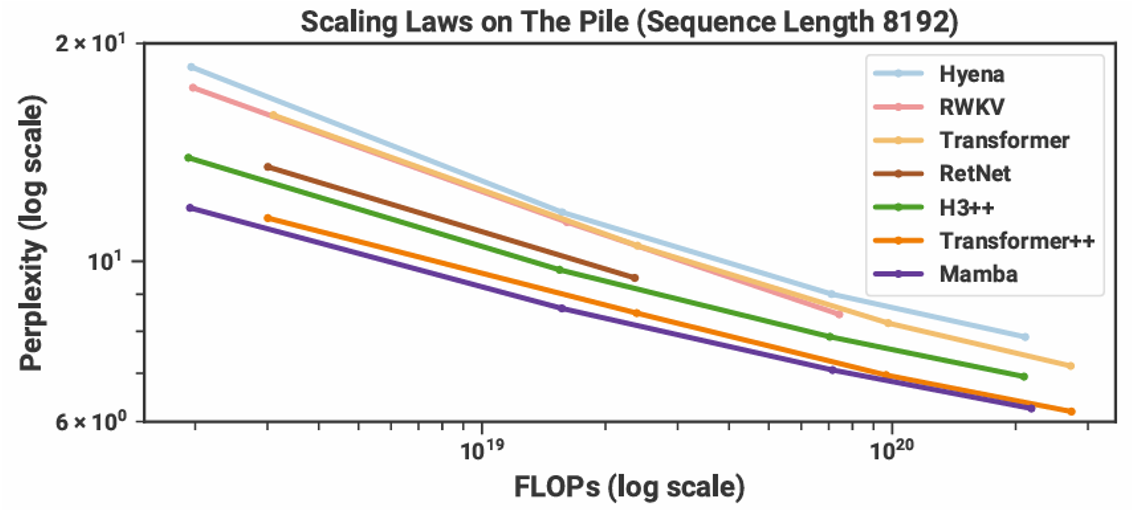
其中比较知名的架构是 Mamba。它不仅出现的早,而且表现也很不错。下面就是有关 Mamba 的实验结果,可以看到只有 Mamba 赢过了 Transformer,以及改进过的 Transformer++(纵轴值越小表现越好
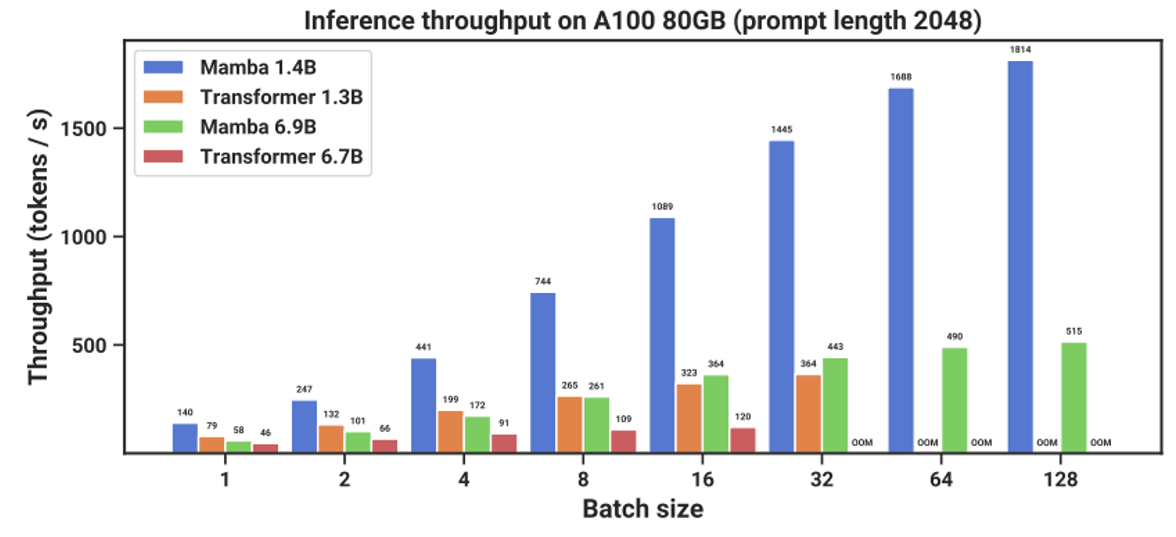
像 Mamba 这类线性注意力的设计,最大的目的就是要加速推理。Mamba 确实也能提供很好的加速,以下是另一个实验结果(和上面的实验出自同一篇论文
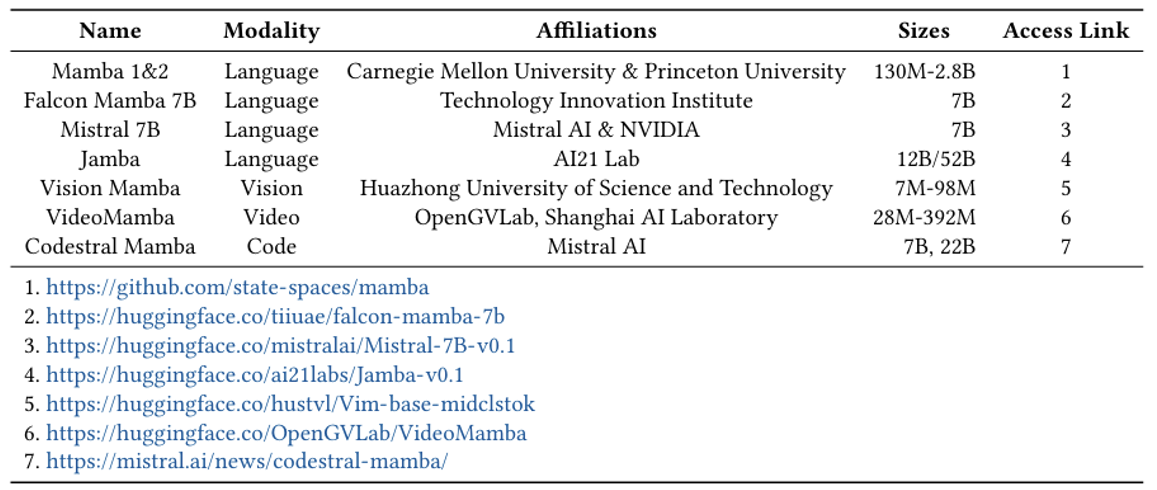
现在有了参数量更大的 Mamba 的变体,如下表所示(来源
以及更大更新的模型 Minimax-01。
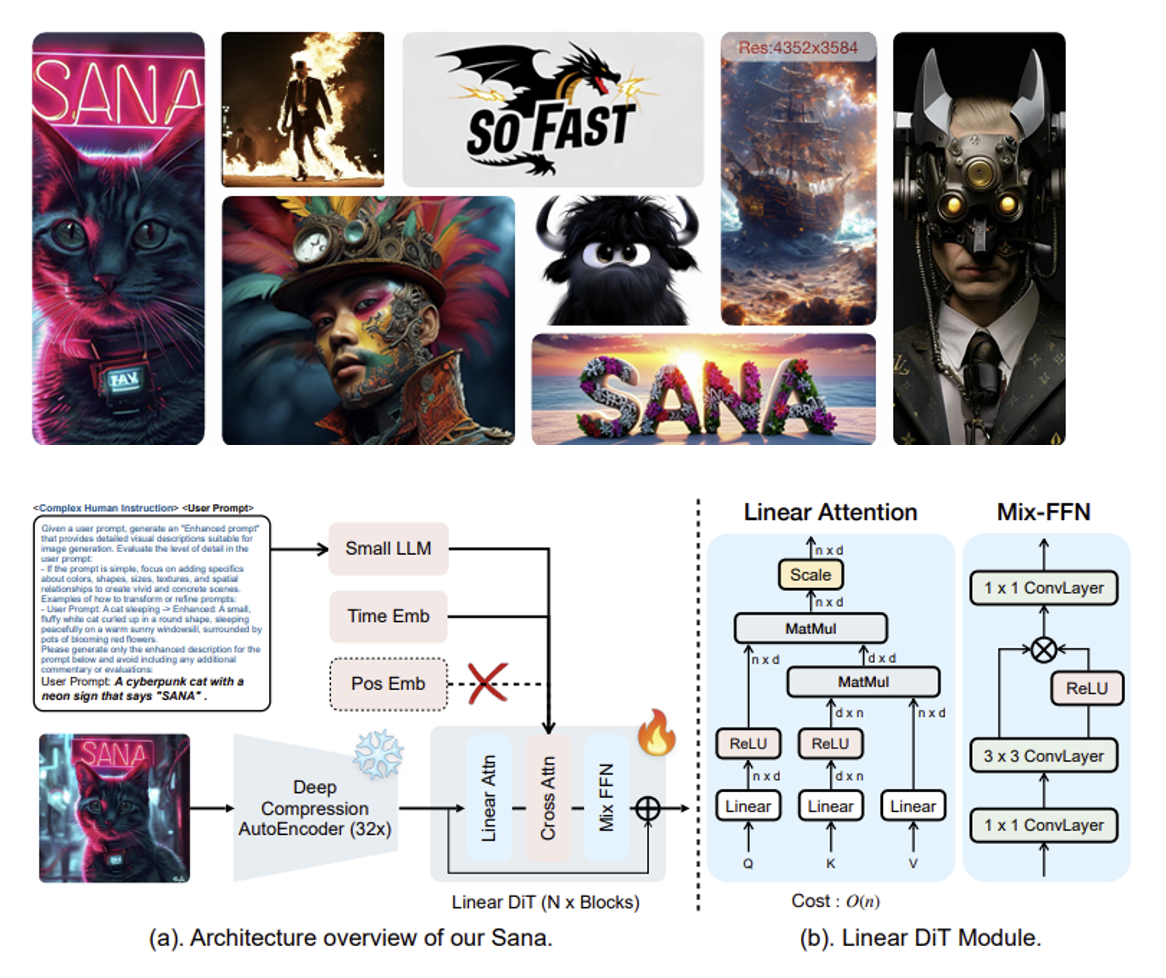
线性注意力的思路还用在了图像生成上,比如 Sana。
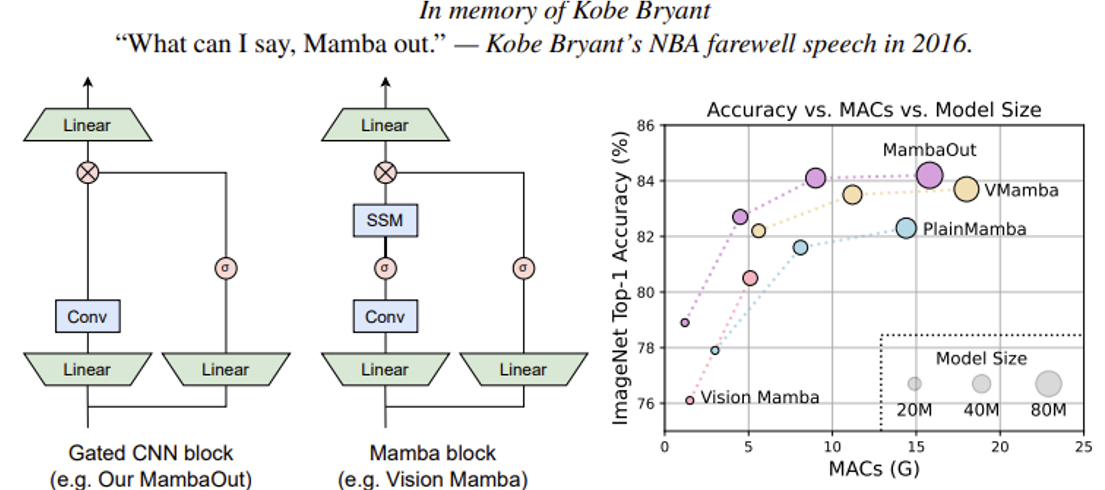
但也有研究(MambaOut: Do We Really Need Mamba for Vision?(标题玩梗 hh
现在要从头训练一个赢过 LLaMA 之类的开源大模型的模型是非常困难的。如果只是尝试用线性注意力替代自注意力,那就可以从现成的模型开始,直接将自注意层换成像 Mamba 之类的线性注意层就行了。相关研究有:
- Low-rank Linear Conversion via Attention Transfer (LoLCATs)
- The Mamba in the Llama
- Transformers to SSMs
- Linger
An Interesting Thing
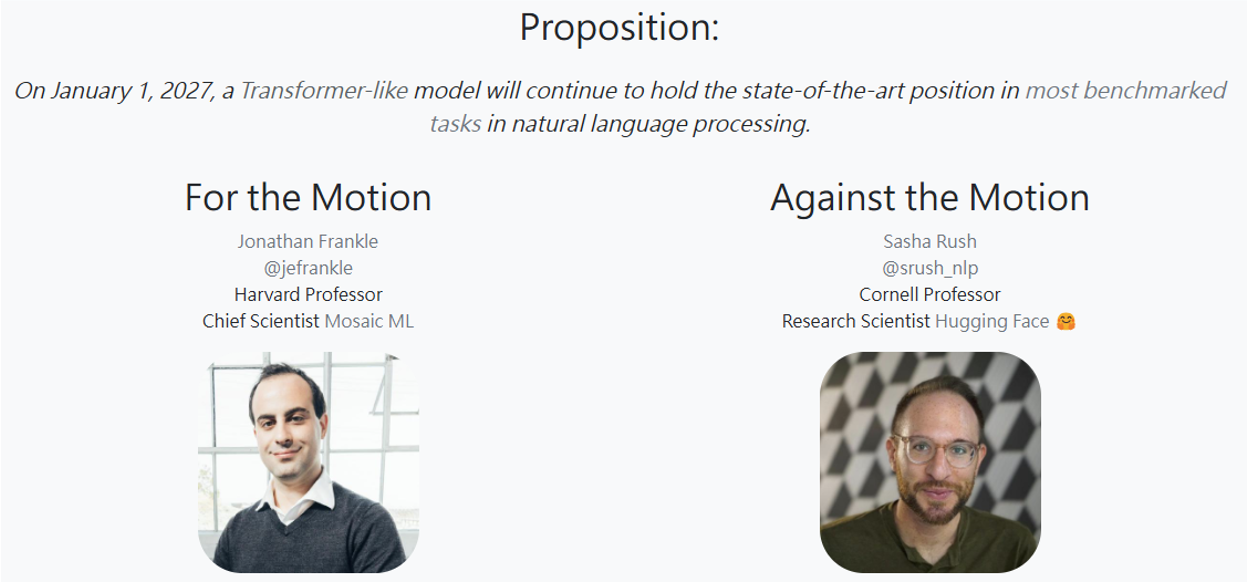
有一个关于 " Is Attention All You Need? " 的赌局,内容为:到 2027 年 1 月 1 日,基于 Transformer 的模型是否仍然 NLP 领域中最强的架构。
DeltaNet⚓︎
另一个线性注意力的变形叫做 DeltaNet,它的式子是:\(H_t = H_{t-1}(I - \beta_t \bm{k_t} \bm{k_t}^T) + \beta_t \bm{v_t} \bm{k_t}^T\)。对这个式子稍作变形:\(H_t = H_{t-1} - \beta_t (H_{t-1} \bm{k_t} - \bm{v_t}) \bm{k_t}^T\),聪明的读者也许已经发现,这和梯度下降法非常相似。
- \(H_t\):更新后的参数
- \(H_{t-1}\):更新前的参数
- \(\beta_t\):学习速率
- 剩下那一串就是梯度了
损失函数 \(L_t(H) = \dfrac{1}{2} \|H\bm{k_t} - \bm{v_t}\|^2\),所以训练的目标就是更新 \(H\),使得 \(\bm{k_t}\) 提取出来的信息和 \(\bm{v_t}\) 越接近越好。
2025 年年初的一篇论文(Titans: Learning to Memorize at Test Time)涉及到 DeltaNet 的思想,感兴趣的读者可点击链接阅读。
评论区