Animation⚓︎
约 5149 个字 预计阅读时间 26 分钟
正如其字面意思
- 审美 (aesthetic) 问题往往优先于技术问题
- 从建模 (modeling) 角度看,动画将场景模型表示为一个关于时间的函数
- 输出:一系列按顺序观看时能产生动态感 (a sense of motion) 的图像
- 电影:24 fps
- 视频
: (一般来说)30 fps - 虚拟世界(电子游戏
) :90 fps
History⚓︎
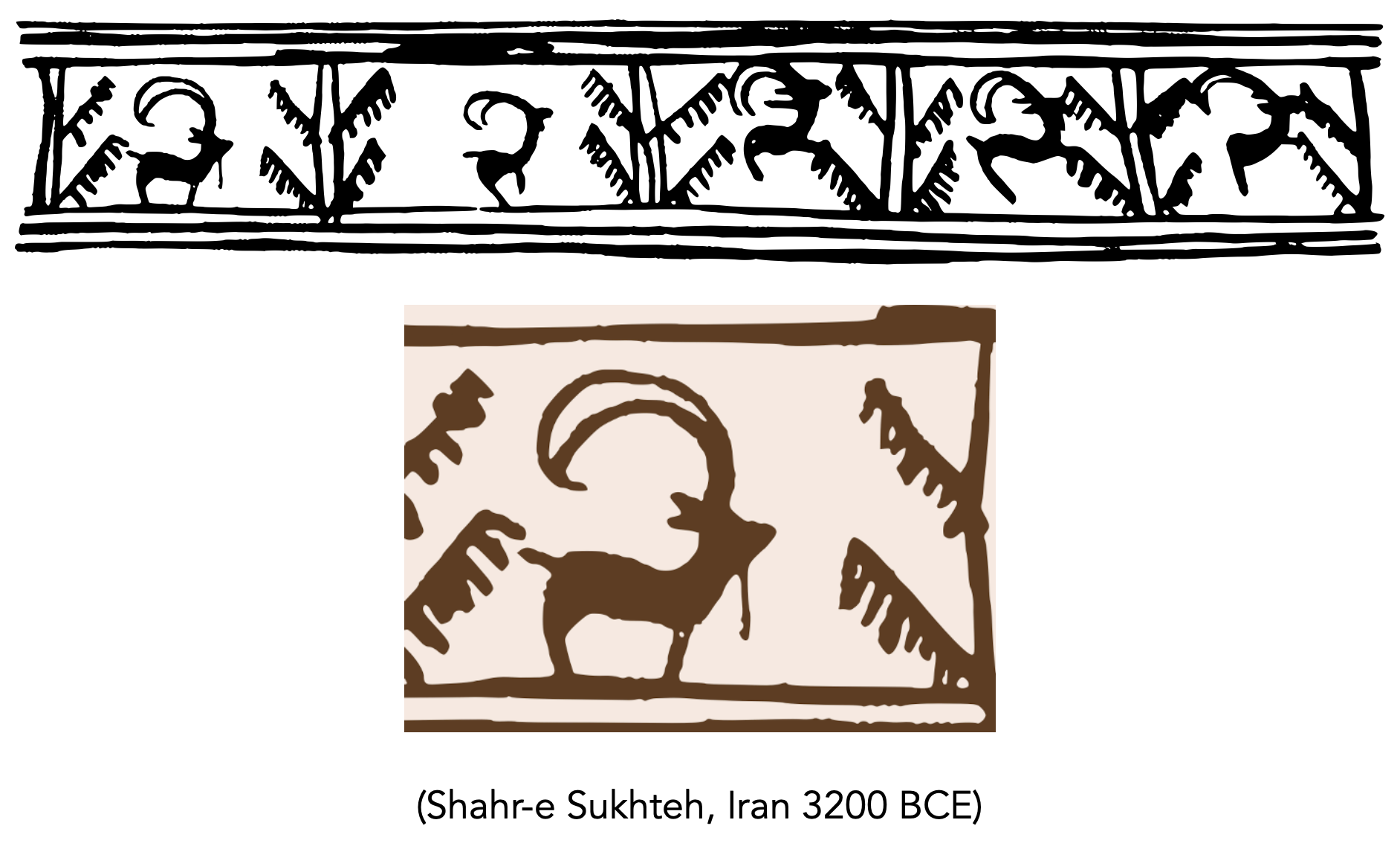
-
最早的动画
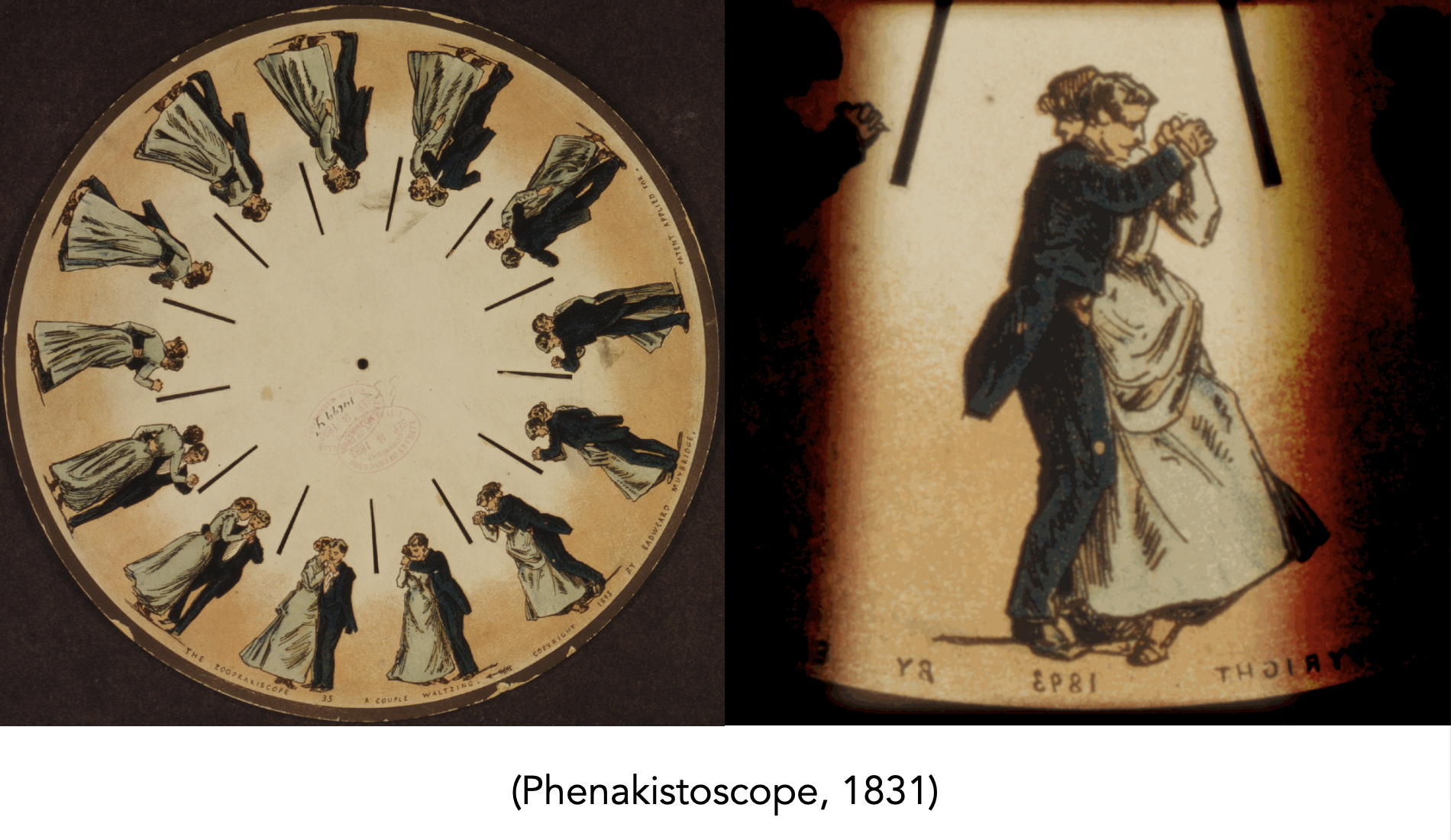
-
历史上的动画
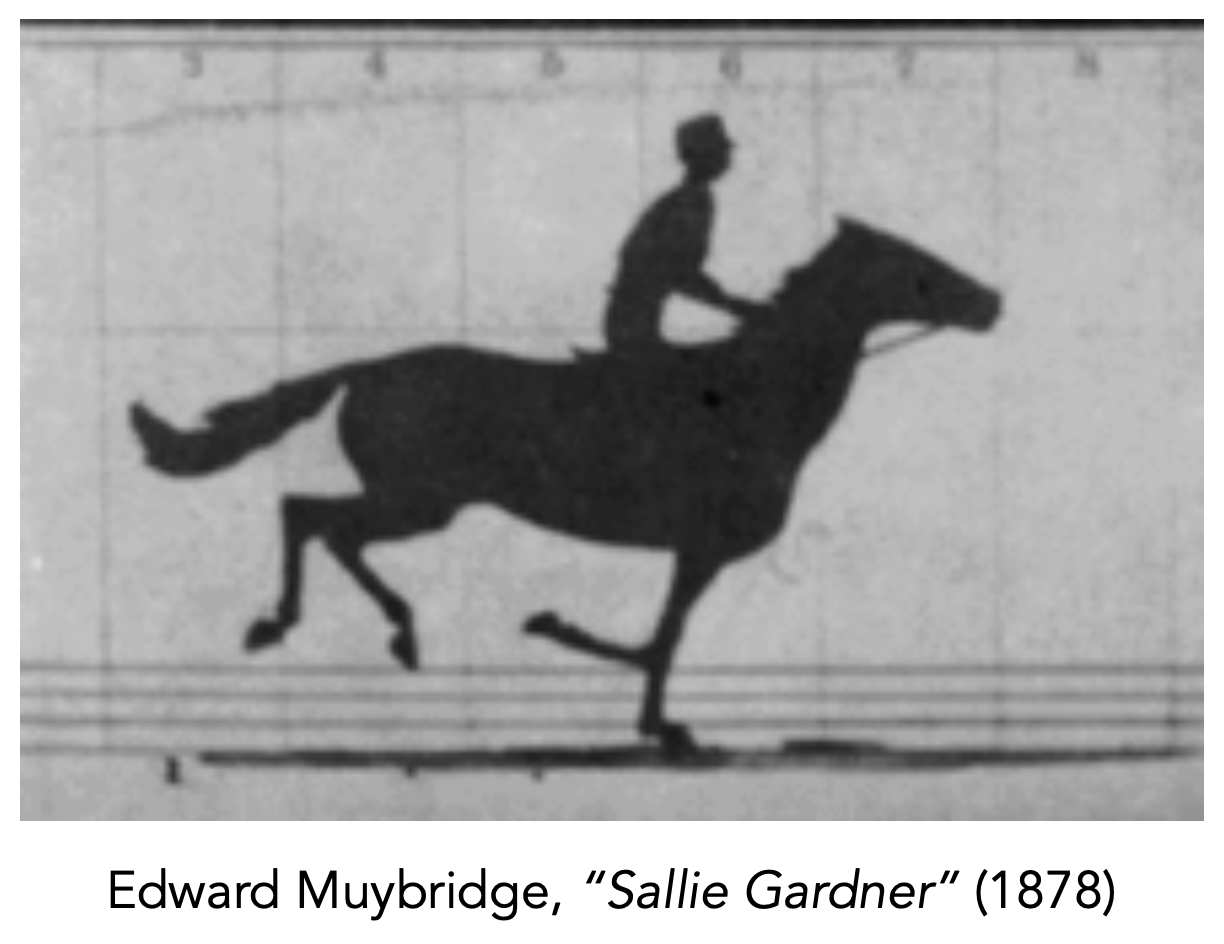
-
第一部电影
- 原本电影是作为科学研究的工具,而非用于娱乐目的
- 电影是加速动画发展的关键技术
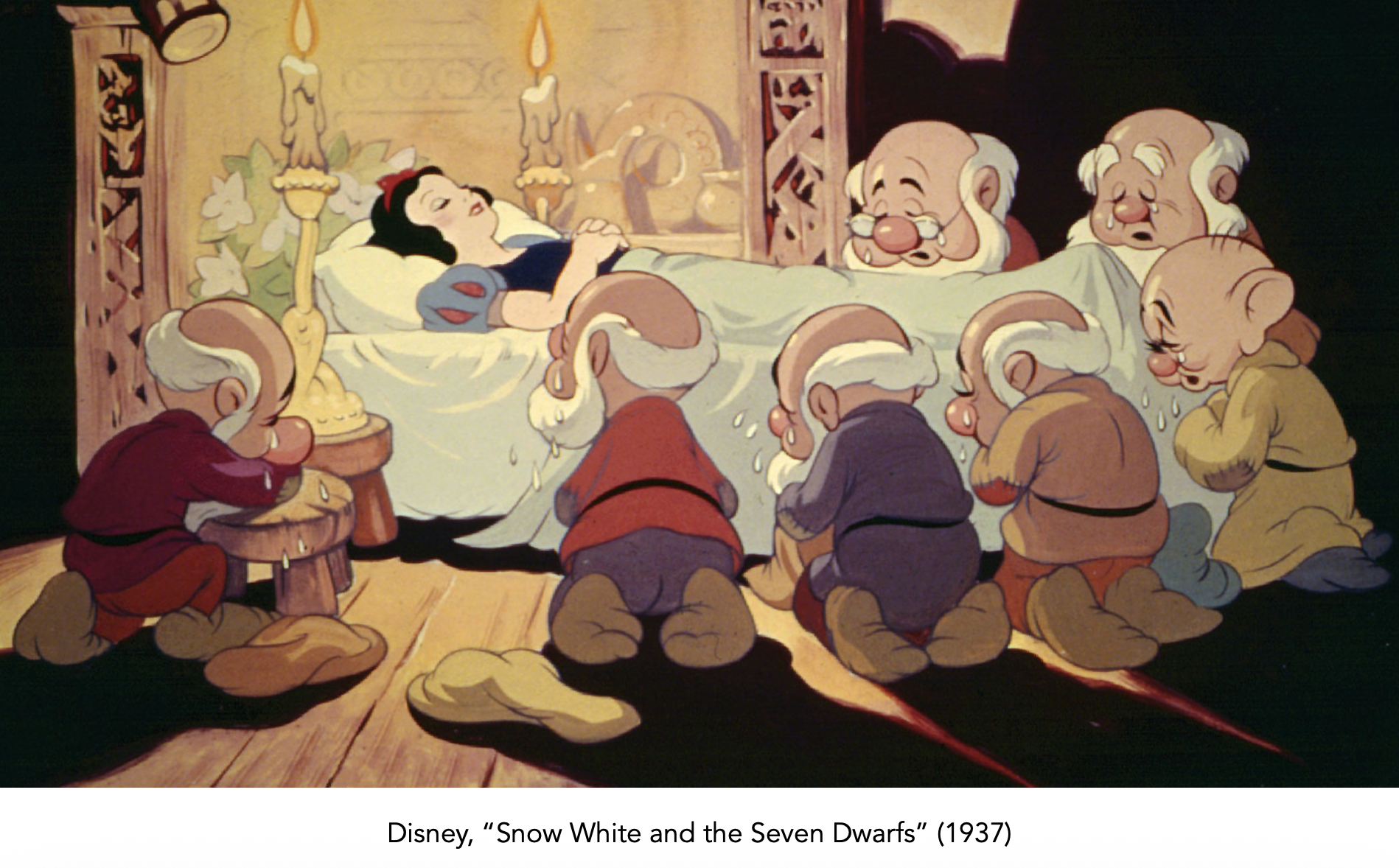
-
首部手绘长篇 (feature-length)(> 40 min)动画
-
第一个由数码计算机生成的动画
-
早期的计算机动画
-
数码恐龙
-
第一部完全由 CG 技术制作的动画

-
十几年前的计算机动画

-
几年前的计算机动画
Keyframe Animation⚓︎
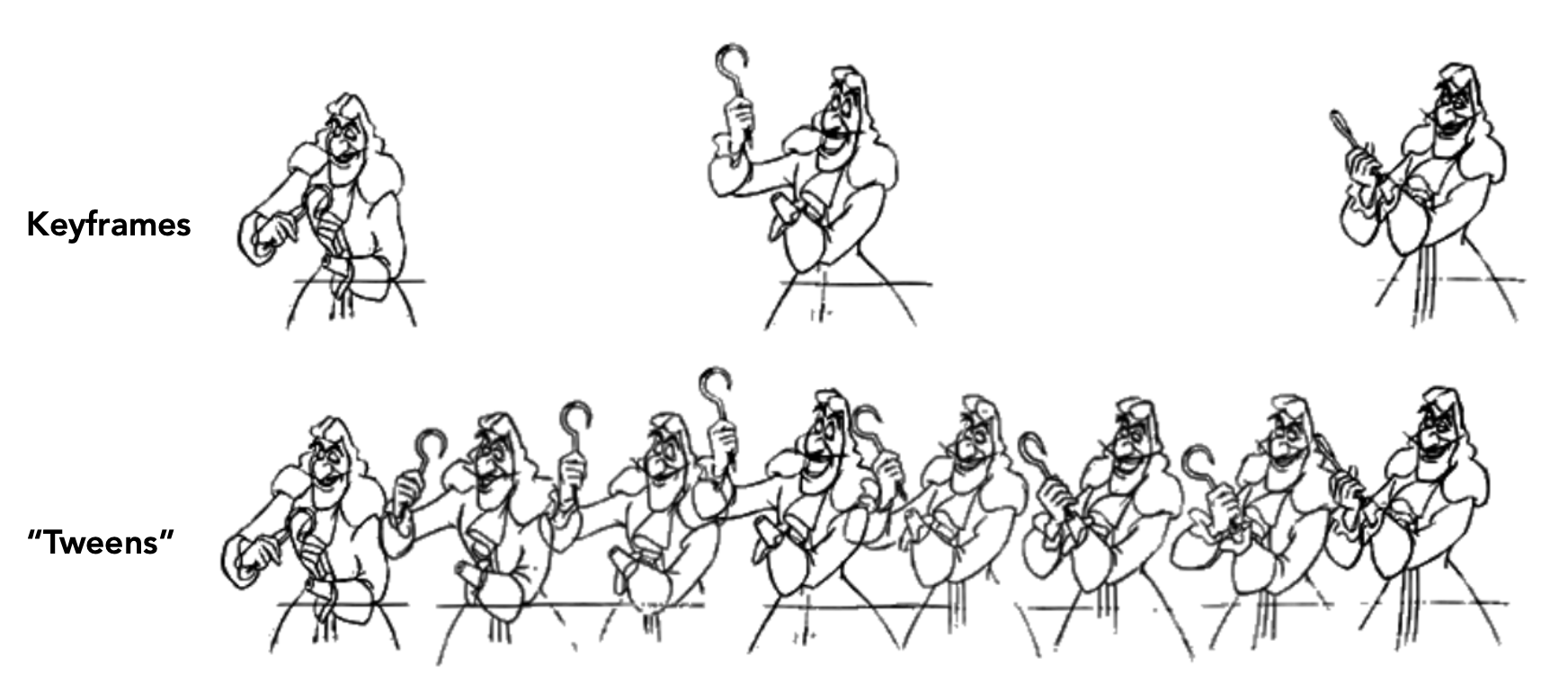
- 动画师绘制关键帧(keyframes)
- 助手(人 / 电脑)负责补充中间帧(in-between frames)(中间帧生成 (tweening))
中间帧生成的过程就是对关键帧的插值 (interpolation)。我们可以把每一帧看作一个参数值向量,然后连接连续帧上相同位置的元素,在连线上进行插值。
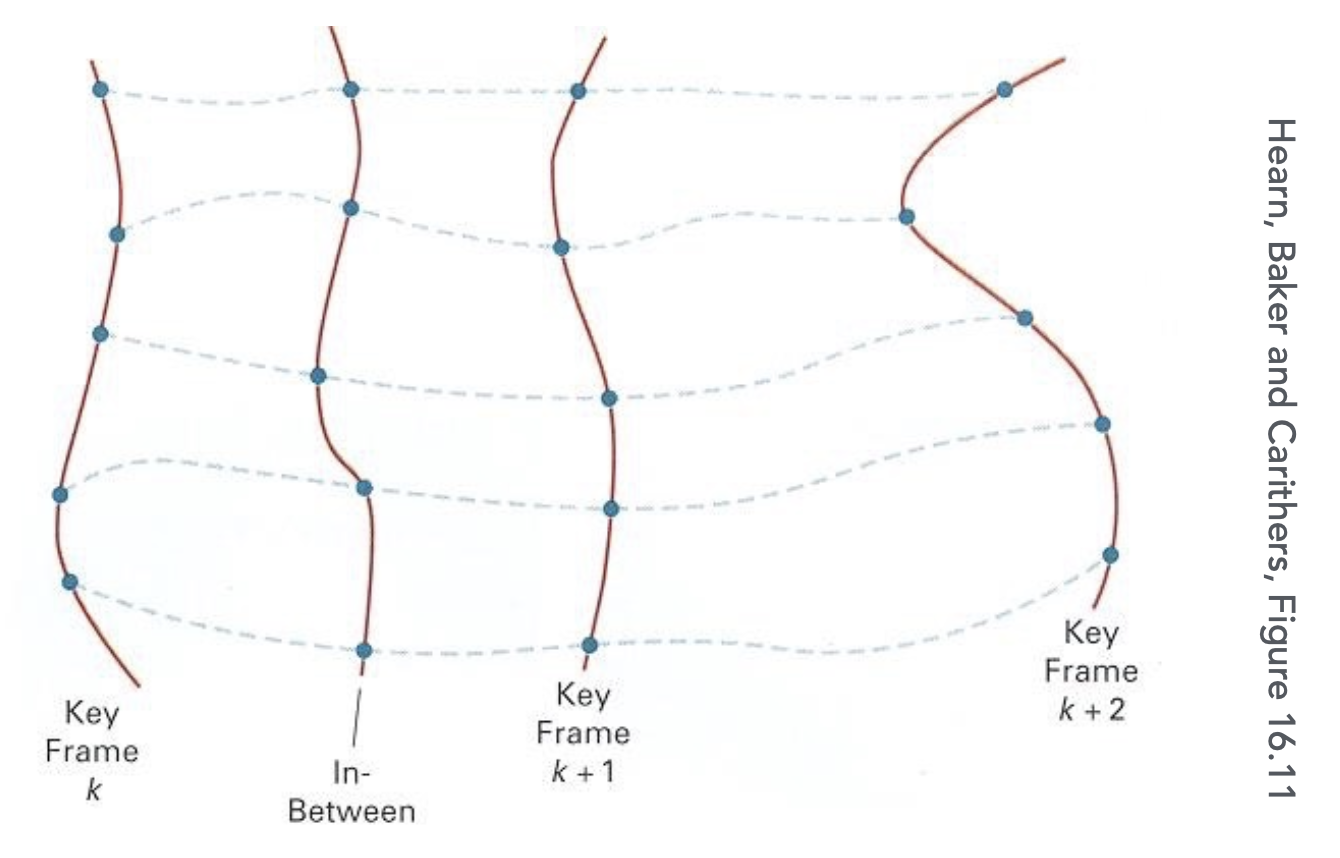
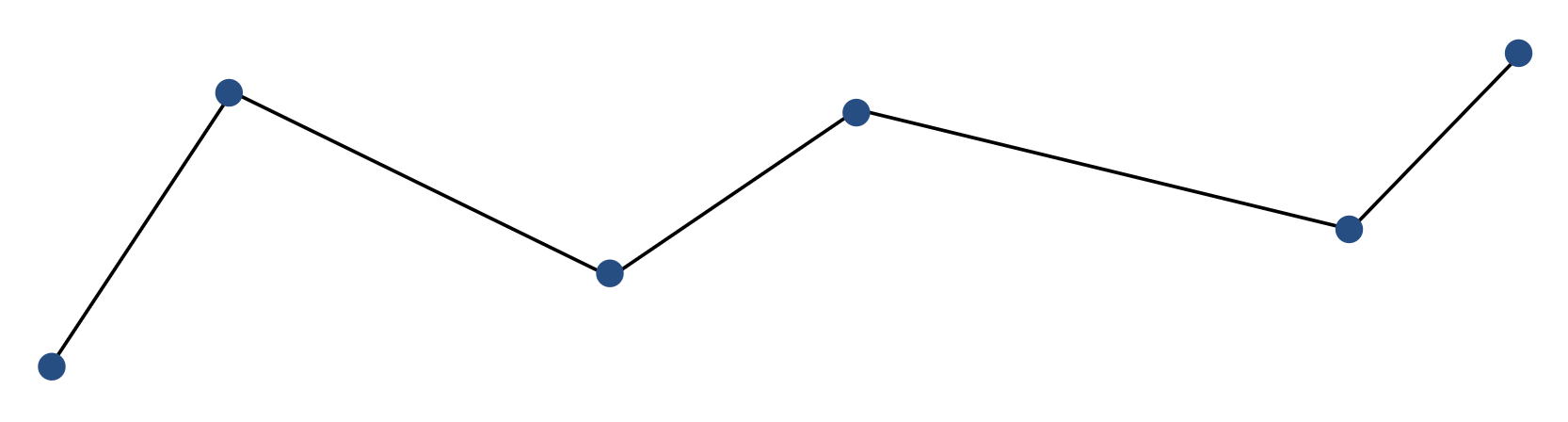
插值方法有:
-
线性插值,但通常效果不佳
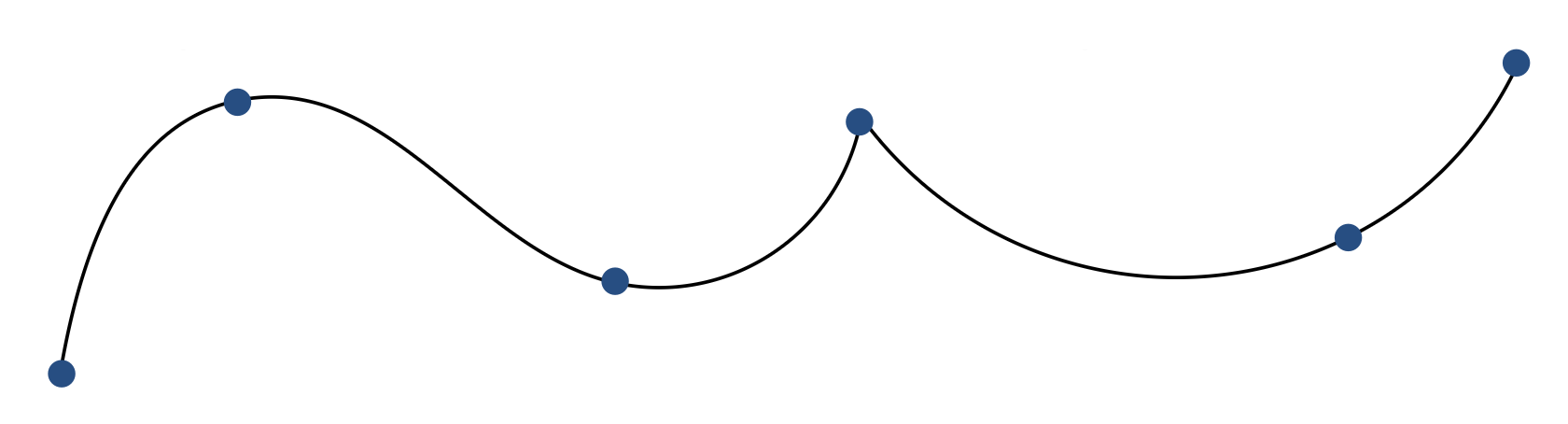
-
更常用的是使用样条(spline) 实现平滑 / 可控的插值
Physical Animation⚓︎
先来回忆一下牛顿第二定律:\(F = ma\)(力 (force) = 质量 (mass) * 加速度 (acceleration)
物理动画通常采用数值模拟来生成物体的运动。
例子

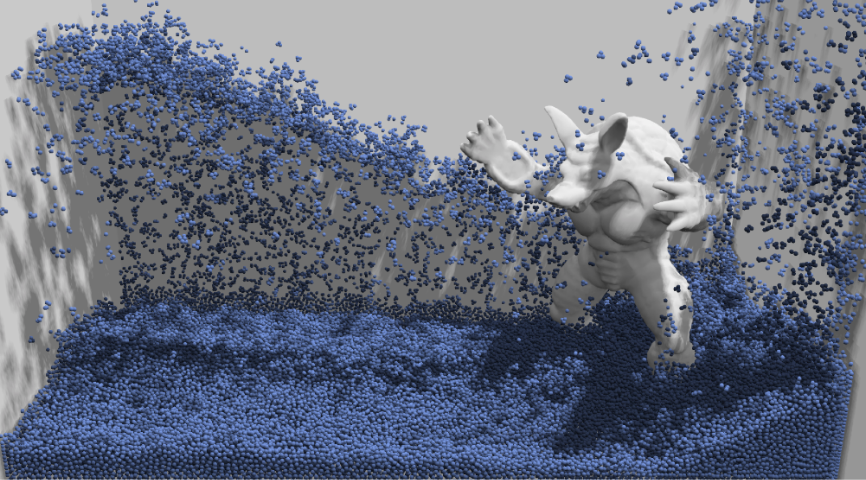
=== " 例 2:" 流体
<div style="text-align: center">
<img src="images/lec12/17.png" width=50%>
</div>
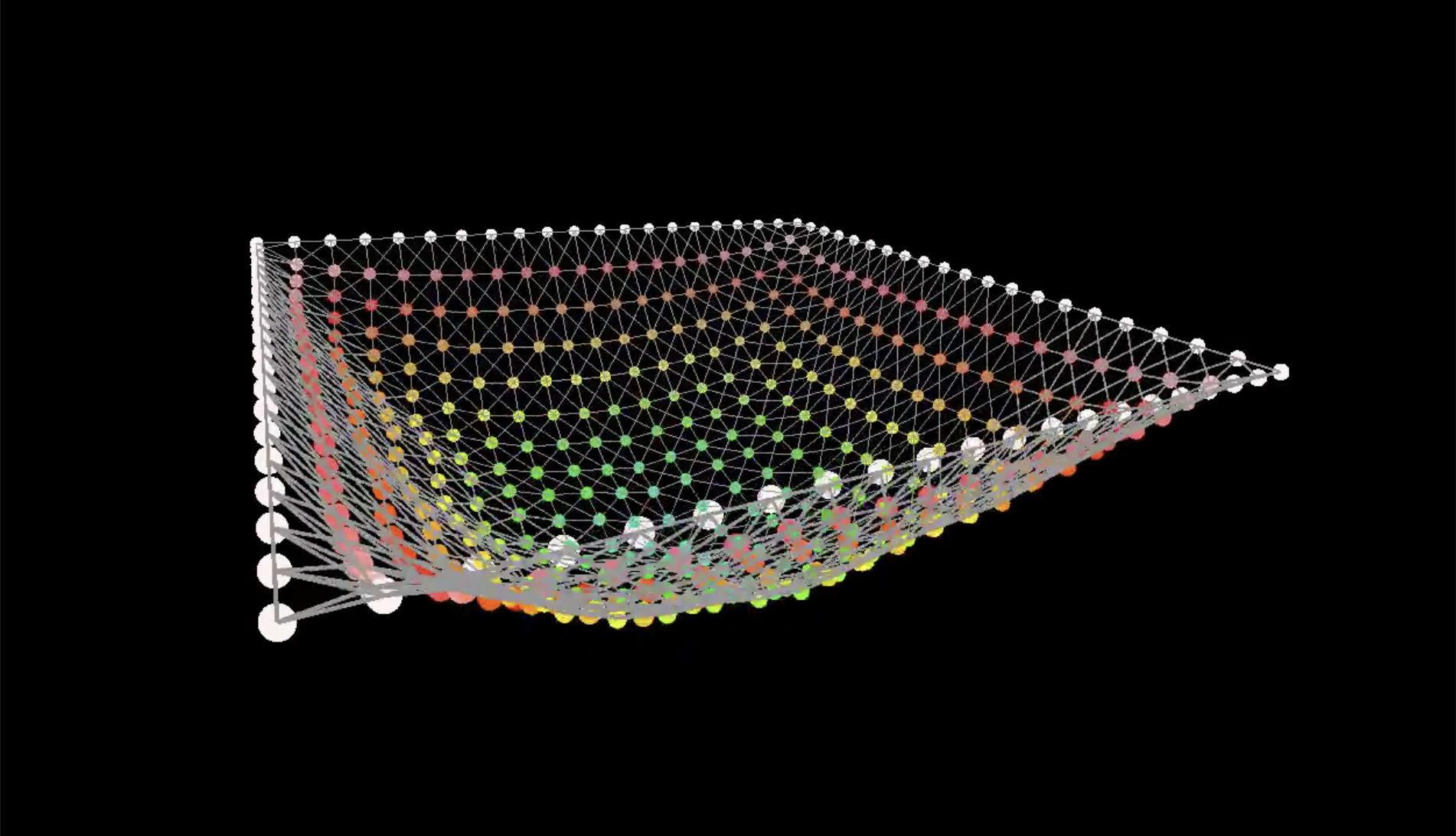
Mass Spring System⚓︎
首先要介绍的物理模拟方法是质点弹簧系统(spring mass system)。
例子

我们构建以下理想化的弹簧(spring) 模型:
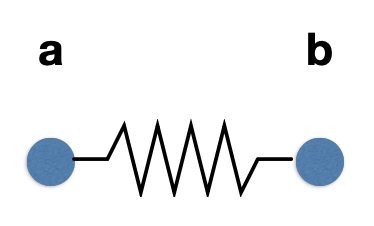
- 拉开弹簧,弹力会让弹簧上两点相互靠近
- 弹力和位移成正比(胡克定律 (Hooke's law))
- \(k_s\) 表示弹簧系数(刚度 (stiffness))
- 该模型的问题:只有当弹簧长度为 0 时才没有弹力,这显然不符合物理规律
所以我们需要考虑非零静止长度(rest length)(记作 \(l\))下的弹簧模型,公式变为: $$ \bm{f}_{a \rightarrow b} = k_s \dfrac{\bm{b} - \bm{a}}{|\bm{b} - \bm{a}|}(|\bm{b} - \bm{a}| - l) $$
但这个模型还有一个问题:一旦拉长弹簧后,弹簧会永远振荡下去,不会停止。这显然是因为没有考虑到其他力的作用。
在继续改进模型前,我们先约定以下记号:
其中 \(\bm{\dot{x}}, \bm{\ddot{x}}\) 分别表示 \(\bm{x}\) 的一阶和二阶导数,即速度和加速度。
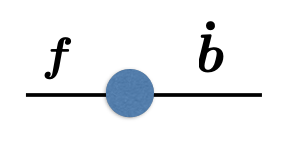
现在我们引入导致弹簧模型能量损失的来源——一个简单的阻尼(damping):\(\bm{f} = -k_d \bm{\dot{b}}\)
- 这就像一股粘性阻力 (viscous drag)
- 让沿着速度方向上的运动减速
- \(k_d\) 为阻尼系数
当然还是由于定义过于简单,新的问题出现了:所有方向上的运动都会减速。原因是模型还没有考虑弹簧内部的损耗。
- 比如弹簧的两个端点同时向右运动,此时两者的相对位置保持不变,因而不存在什么弹力;但依照目前的模型,这个弹簧仍然会受到阻尼,最终停下来。
- 又比如将一个弹簧竖直放在空中,让它自由下落;依据当前的模型,它的降落速度会越来越慢,但实际上的空气阻尼不会这么大,几乎可以不用考虑。
所以最后引入在弹簧内部的阻尼,公式改为: $$ \bm{f}_{\bm{b}} = -k_d \dfrac{\bm{b} - \bm{a}}{|\bm{b} - \bm{a}|}(\bm{\dot{b}} - \bm{\dot{a}}) \cdot \dfrac{\bm{b} - \bm{a}}{|\bm{b} - \bm{a}|} $$
- \(\bm{f}_{\bm{b}}\):作用在 \(\bm{b}\) 上的阻尼力
- \(\bm{\dot{b}} - \bm{\dot{a}}\):假设 \(\bm{a}\) 静止时,\(\bm{b}\) 的相对速度
- \(\dfrac{\bm{b} - \bm{a}}{\|\bm{b} - \bm{a}\|}\):\(\bm{a}\) 到 \(\bm{b}\) 的方向(归一化处理)
- \(\dfrac{\bm{b} - \bm{a}}{\|\bm{b} - \bm{a}\|}(\bm{\dot{b}} - \bm{\dot{a}})\):相对速度在 \(\bm{a}\) 到 \(\bm{b}\) 的方向上的投影(结果是标量)
对于该模型:
- 仅在弹簧长度变化时产生粘性阻力,不会减缓弹簧系统中的整体运动(比如整体的平移或旋转)
- 注:这只是其中一种特定类型的阻尼
可用弹簧模型构成的结构:
-
片 (sheet)
-
块 (block)
-
其他 ...
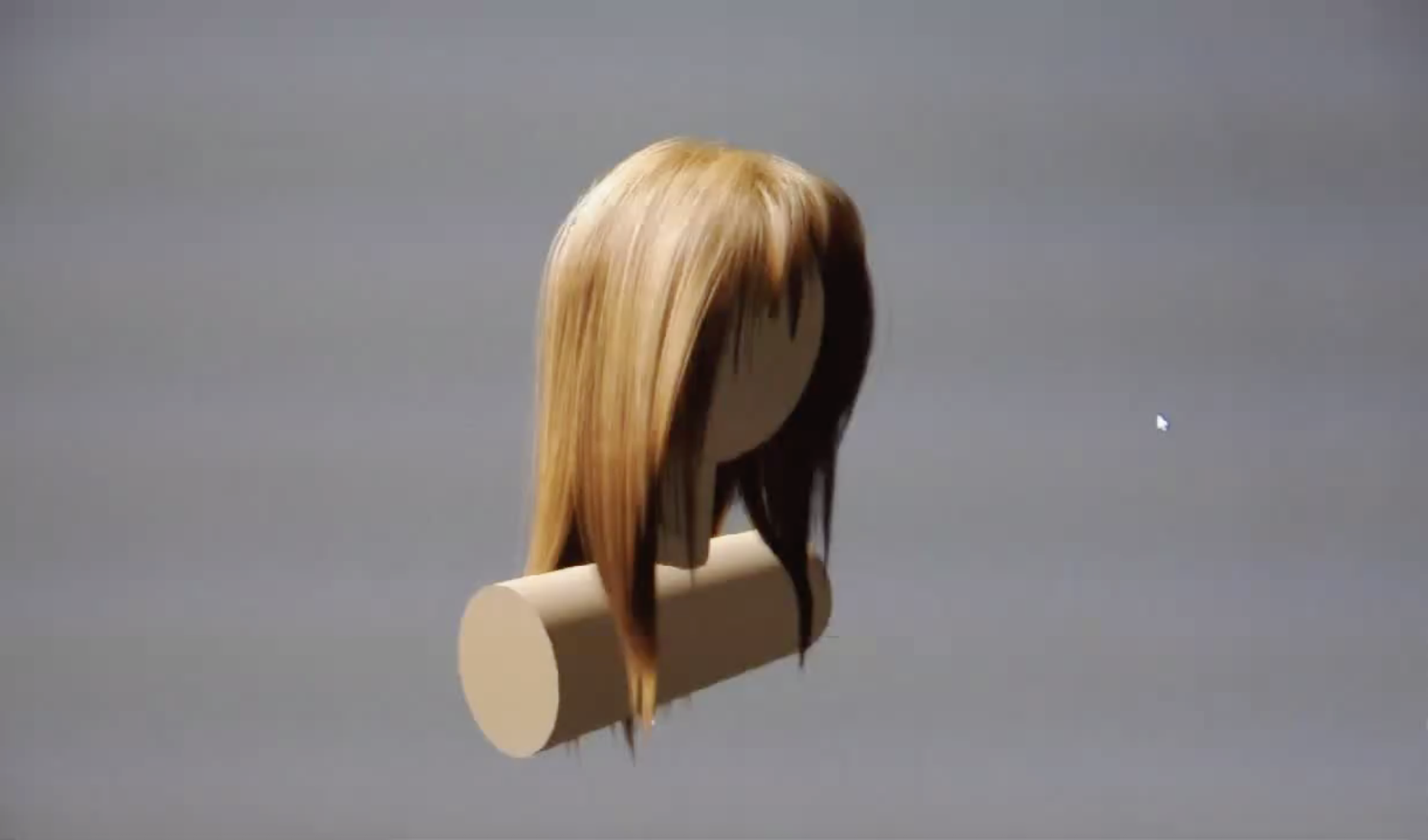
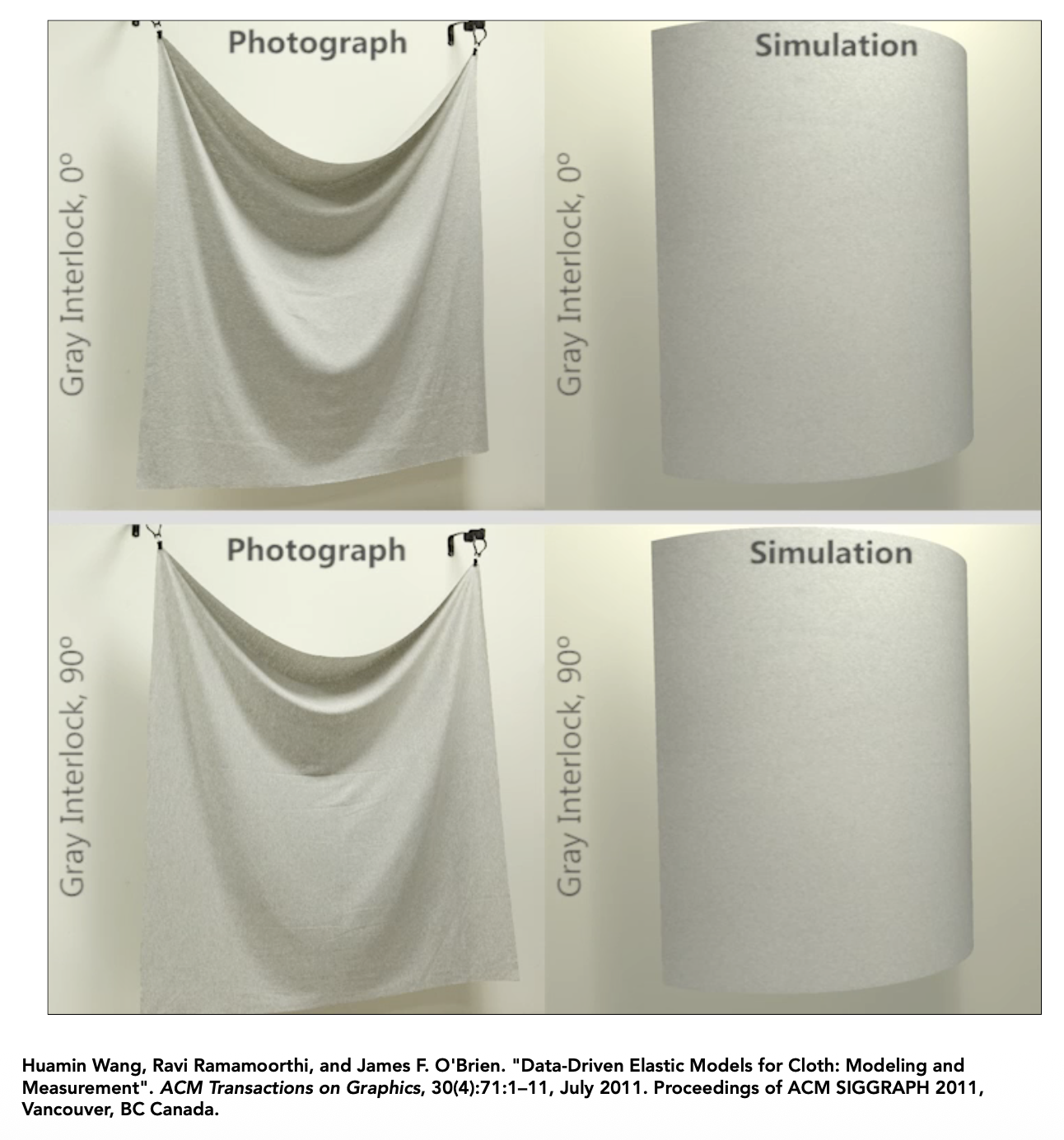
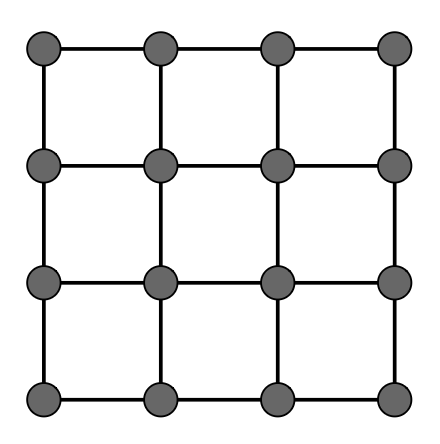
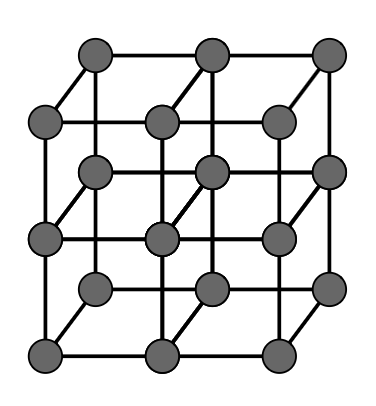
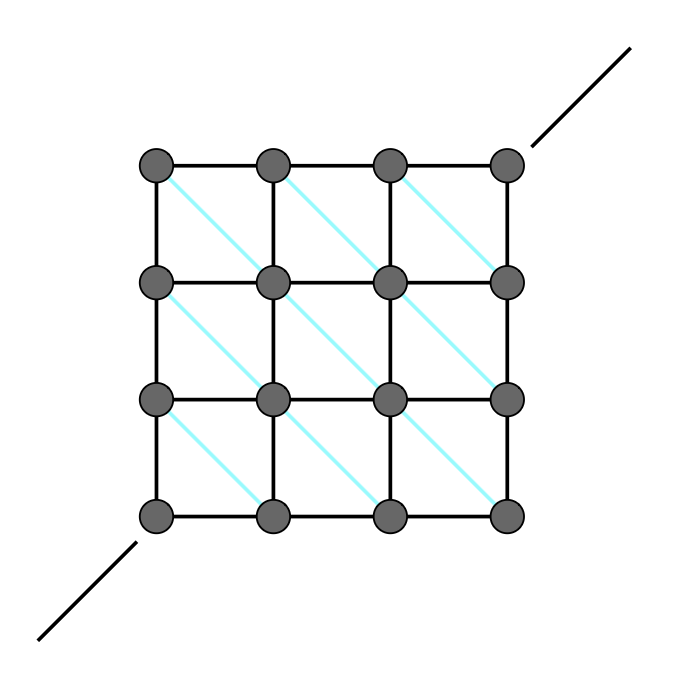
下面主要介绍(用于模拟布料的)片结构。目前的片结构存在两个问题:
- 无法抵抗切变(shearing) 力(拉住对角线后,被拉住的两端就会被拉长,另一个对角线就会缩短,但(非弹性的)布料不是这样的)
- 无法抵抗平面外的弯折(out-of-plane bending)(比如对折,但布料是没法做到像纸那样完全对折的)
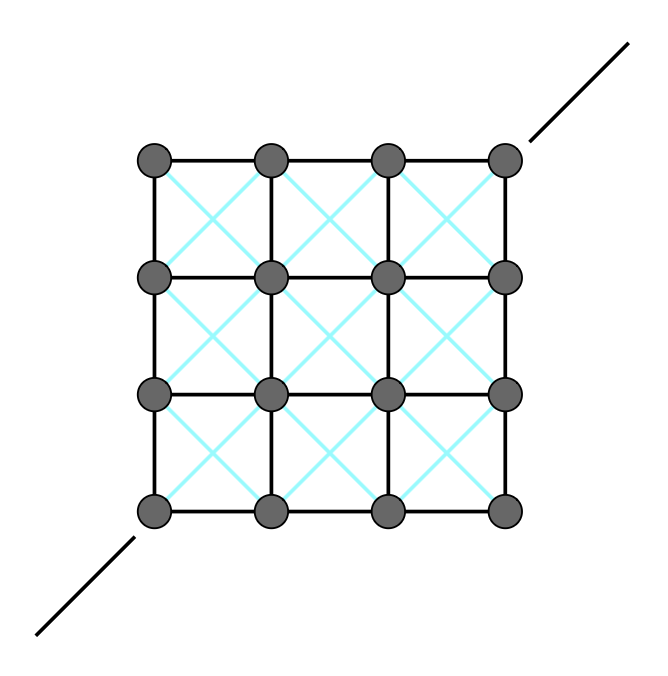
对于第一个问题,可以考虑向网格内加一些垂直对角线来限制:
但这样只考虑了一条对角线,另一条对角线也要有相应的限制,避免各向异性问题:
现在第一个问题解决了,那就来看第二个问题吧!这里给出的解决方案是让网格上两点(中间隔开一个点)用一个更弱的弹簧连接(下图用红线表示
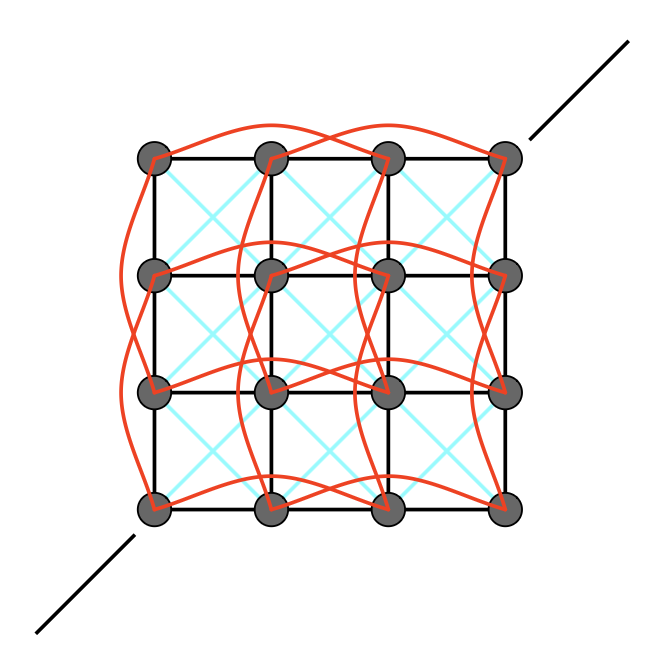
例子

注
用有限元素法(finite element method, FEM) 也能达到类似质点弹簧系统的效果。

Particle System⚓︎

第二种方法是粒子系统(particle system),它将一个动态系统建模为大量的粒子,而每个粒子的运动由物理(或非物理)的作用力推动。这是一种在图形学和游戏中比较流行的技术,因为:
- 易于理解和实现
- 可扩展的 (scalable):粒子数量少则速度快,多则可模拟更高的复杂度
构建粒子系统的挑战有:
- 可能需要大量粒子(比如流体 (fluid))
- 可能需要加速结构(比如用于查找最近粒子以进行相互作用)
用粒子系统制作动画的流程为:对于动画的每一帧图像,
- (若需要)创建新的粒子
- 计算每个粒子上的力
- 更新每个粒子的位置和速度
- (若需要)移除不活跃的粒子
- 渲染粒子
上述流程的关键在于如何计算每个粒子上的力,需要考虑的要素有:
-
吸引(attraction) 与排斥(repulsion) 力
-
重力、电磁力 ...
-
根据万有引力定律,两个粒子会互相吸引
\[ \begin{aligned} F_g & = G\dfrac{m_1 m_2}{d^2} \\ G & = 6.67428 \times 10^{-11} \text{N} \cdot \text{m}^2 \cdot \text{kg}^{-2} \end{aligned} \]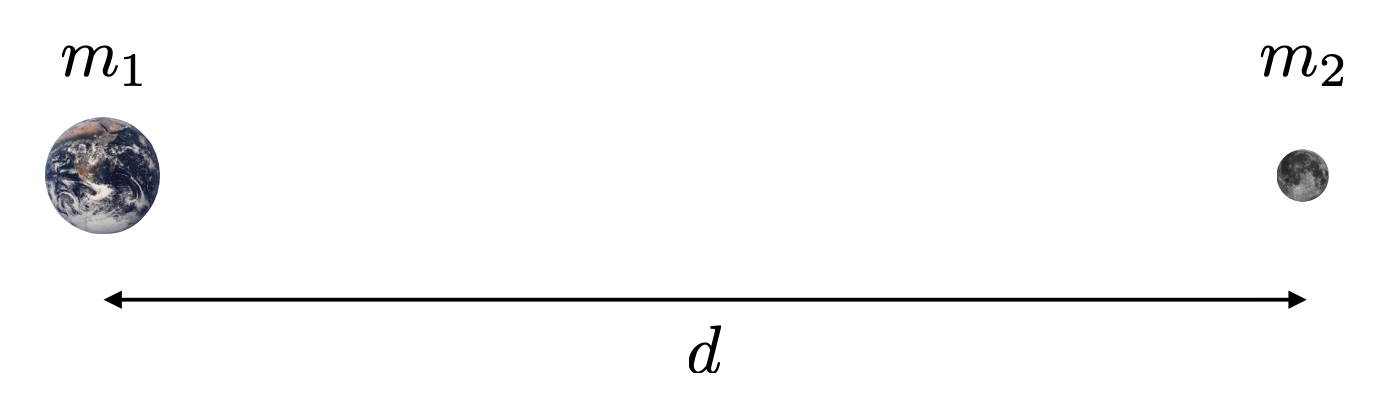
-
-
弹簧、推力 (propulsion)...
- 阻尼力 (damping force)
- 摩擦力、空气阻力、粘滞力
- 碰撞(collision)
- 墙壁、容器、固定物体 ...
- 动态对象,角色身体部位 ...
-
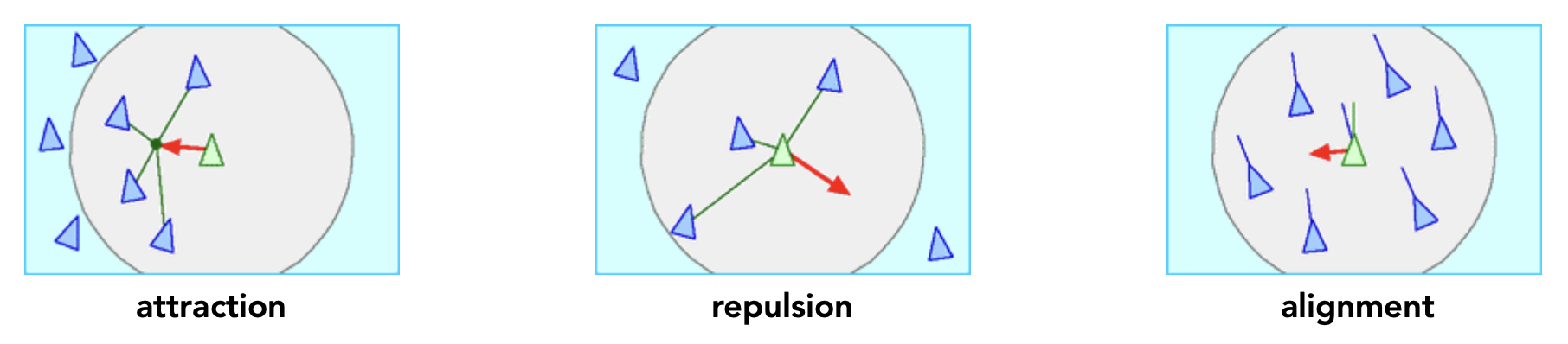
例子

- 将鸟群中的每只鸟建模为一个粒子
-
- 吸引 (attraction) 到邻居们的中心
- 对单个的邻居是排斥 (repulsion) 的
- 向邻居们的平局轨迹 (trajectory) 对齐 (alignment)
这些粒子会受到以下力:
-
数值模拟大粒子系统的演化
- 涌现的复杂行为(也见于鱼类、蜜蜂等 ...)
Kinematics⚓︎
Forward Kinematics⚓︎
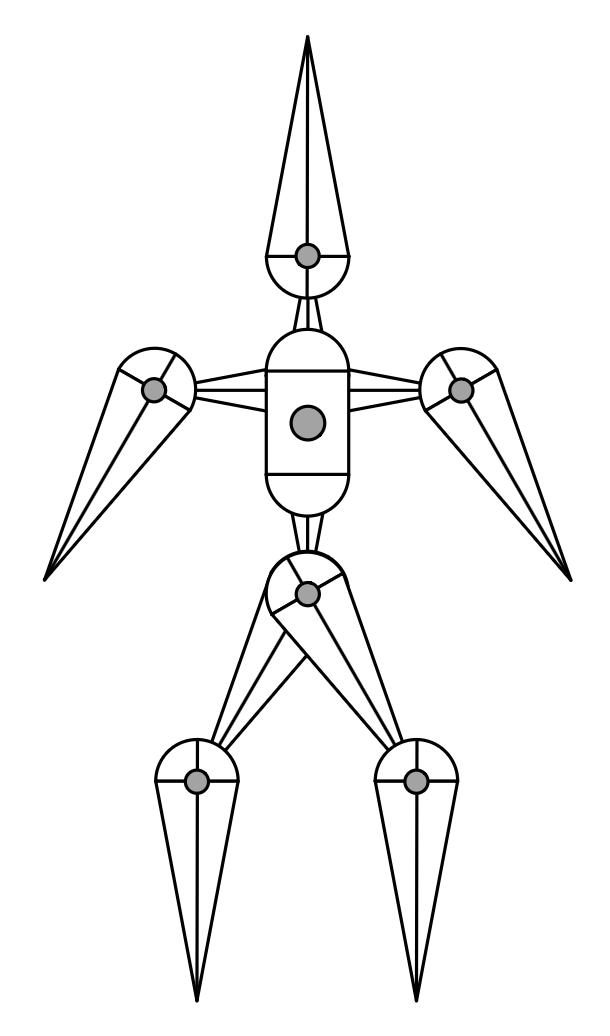
正向运动学(forward kinematics) 涉及以下几部分:
- 关节骨架 (articulated skeleton)
- 拓扑学 (topology)(什么连接到什么)
- 关节间的几何关系
- 树状结构(没有环状结构)
-
关节类型 (joint types)
-
钉子 (pin)(1D)
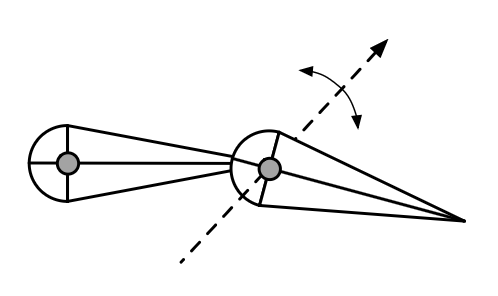
-
球 (ball)(2D)
-
棱柱关节 (prismatic joint)(实现平移)
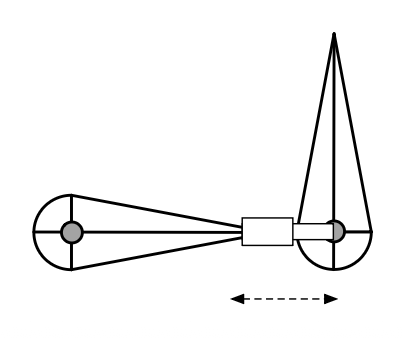
-
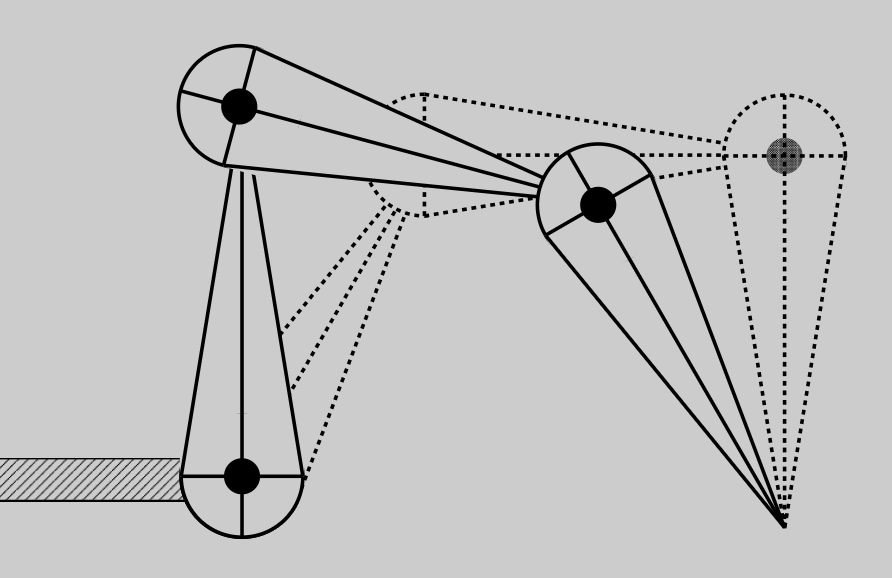
下面是一个简单的 2D 两段手臂:
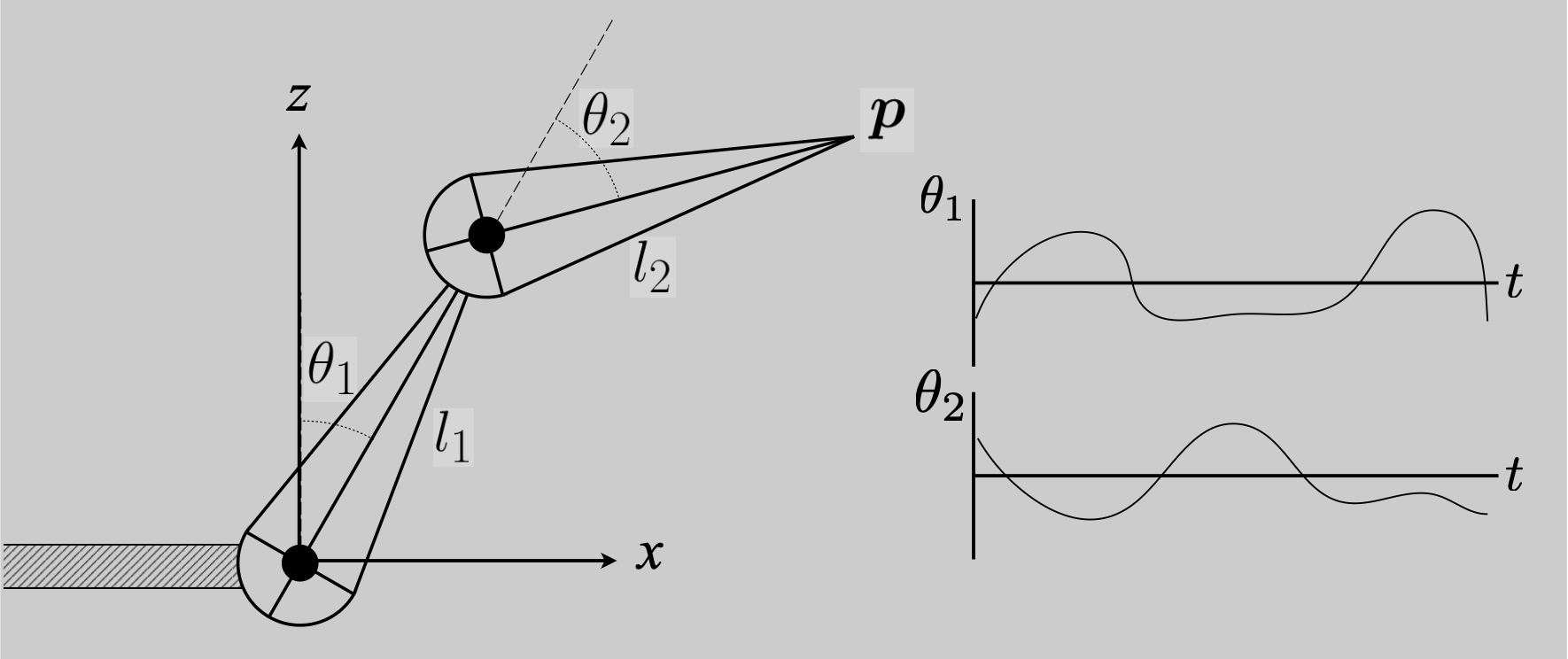
- 动画师确定每一段的旋转角度
-
计算机确定末端执行器 (end effector) \(p\) 的位置
\[ \begin{aligned}p_z&=l_1\cos(\theta_1)+l_2\cos(\theta_1+\theta_2)\\p_x&=l_1\sin(\theta_1)+l_2\sin(\theta_1+\theta_2)\end{aligned} \]
这样形成的动画就是一个角度参数值随时间变化的函数。
例子
运动学的优缺点:
- 优点:
- 方便直接控制
- 实现很直接
- 缺点:
- 动画表现可能不符物理规律
- 艺术家创作更耗时
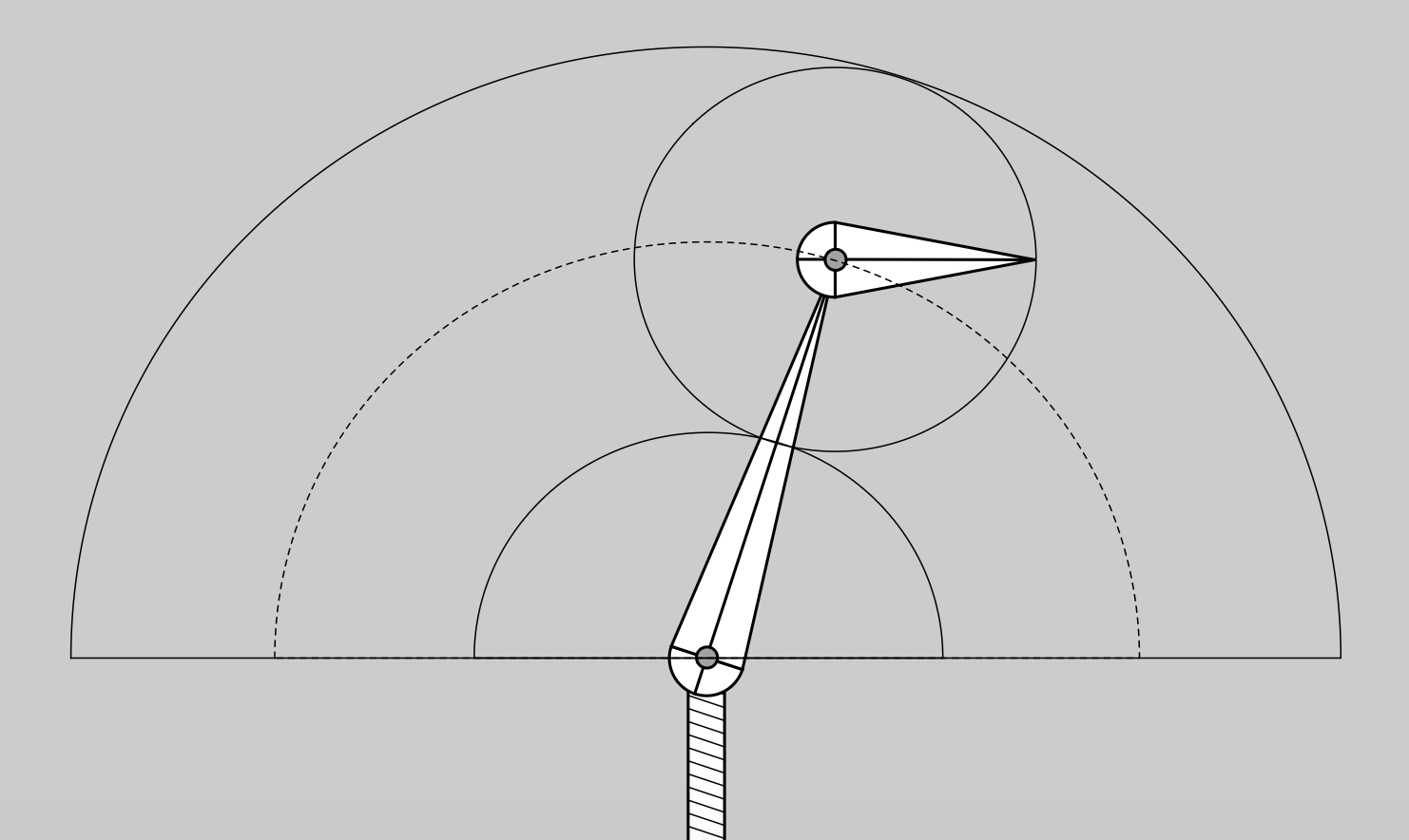
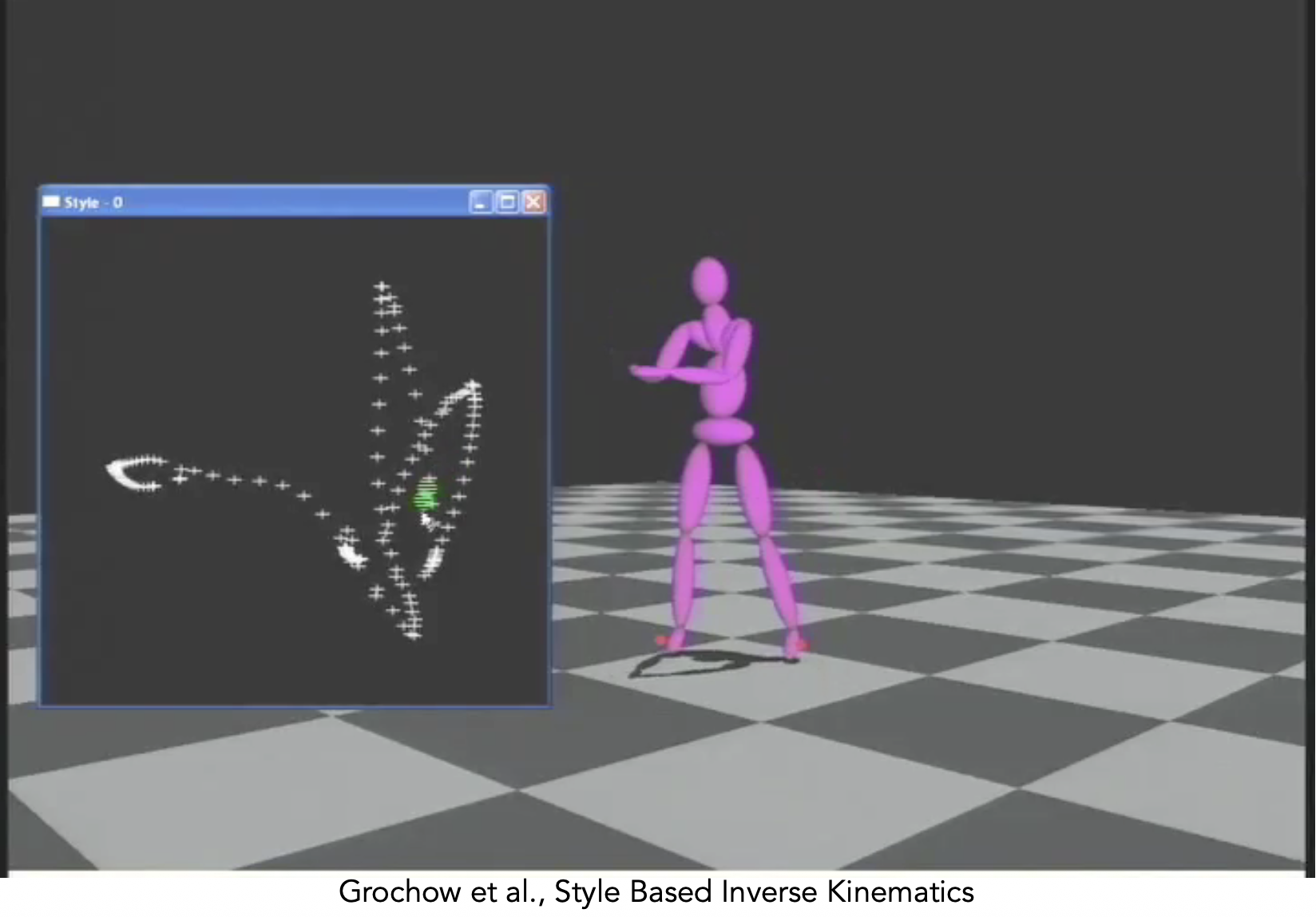
Inverse Kinematics⚓︎
例子
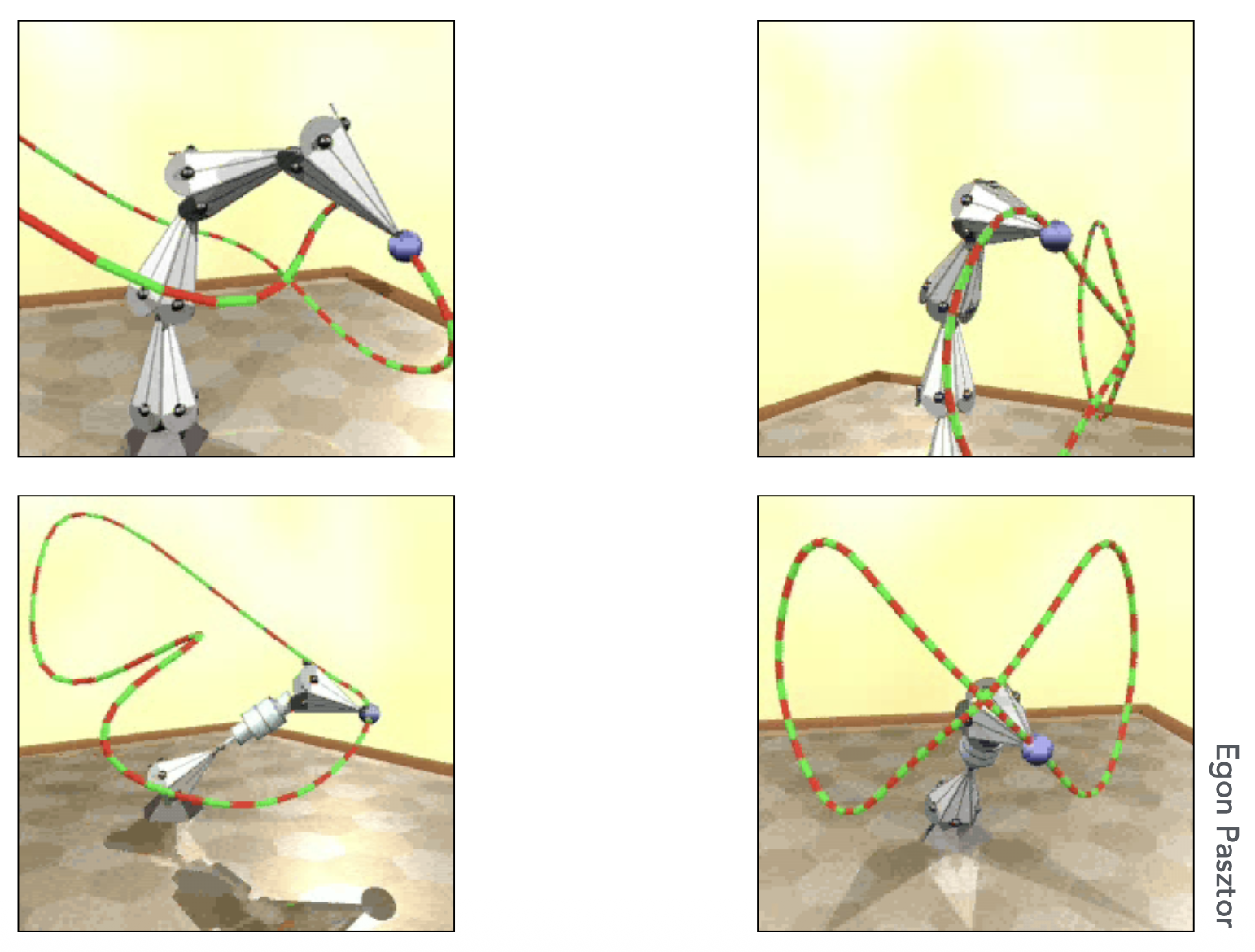
逆向运动学(inverse kinematics) 中,动画师和计算机的工作正好相反:
- 动画师提供末端执行器的位置
- 而计算机必须确定关节的旋转角度,同时能满足约束
对于前面那个两段手臂的例子,可直接以分析方式求解参数(即旋转角度
但逆向运动学的诸多问题却很难求解,因为:
-
对于相同的配置空间,可能存在多个解
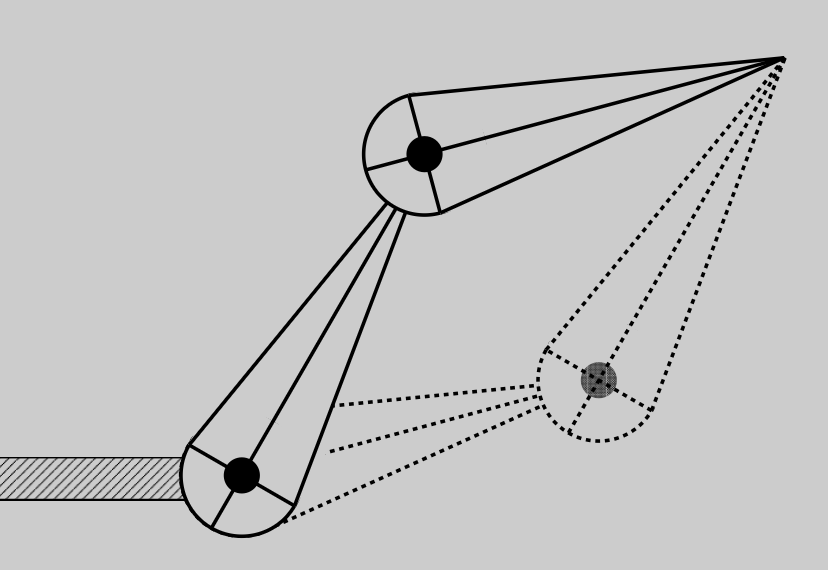
-
有时会出现无解的情况
求 N 连接的逆向运动学问题的数值解的一般步骤:
- 选择初始配置
- 定义一个误差度量
- 计算误差关于配置的梯度
- 应用梯度下降法(或牛顿法等其他优化过程)
例子
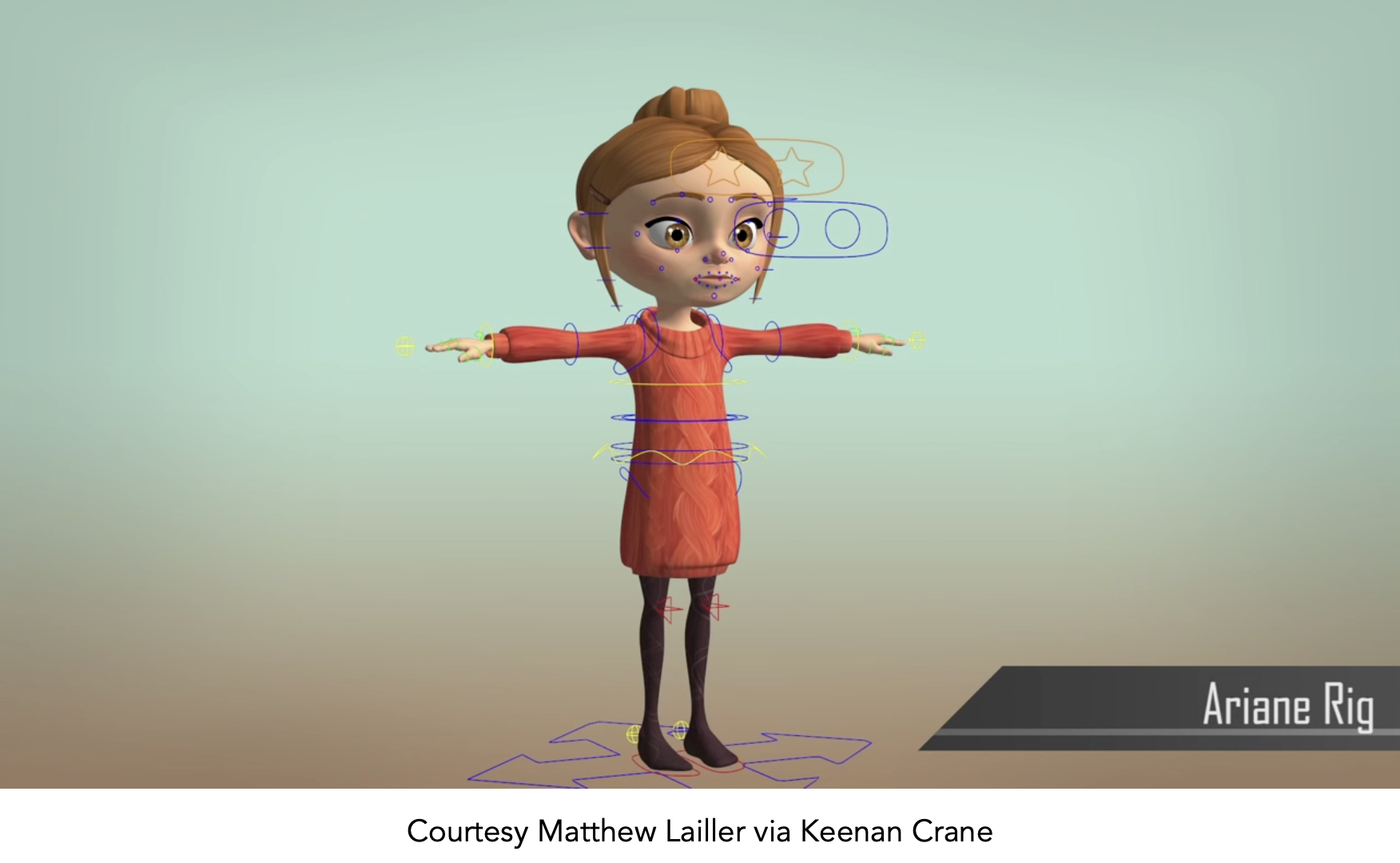
Rigging⚓︎
rigging 这玩意儿好像没发现好的中文翻译 ...
rigging 是一套对角色进行更高级别控制的系统,它能够更加迅速且直观地调整姿势、形变、表情等。
- 类似于控制木偶的提线
- 捕捉所有有意义的角色变化
- 因角色而异
但这种技术的问题在于成本高昂:
- 需要人工的努力
- 同时对艺术和技术方面的训练提出要求
例子
Blend Shapes⚓︎
混合形状(blend shapes) 的原理是:
- 不采用骨架,直接在表面之间进行插值
- 例子:模拟一系列面部表情
- 最简单的方案:对顶点位置进行线性组合
- 使用样条曲线来控制随时间变化的权重选择
例子

Motion Capture⚓︎
动作捕捉(motion capture) 是一种用于创建动画序列的数据驱动方法。
- 记录现实世界中的表现(比如某个人在完成某个活动)
- 从收集的数据中提取姿势,作为一个关于时间的函数
该方法的优缺点为:
- 优点:
- 能快速捕捉大量现实数据
- 动画的真实性很高
- 缺点:
- 复杂且设置成本高
- 捕捉到的动画可能无法满足艺术需求,需要额外的调整
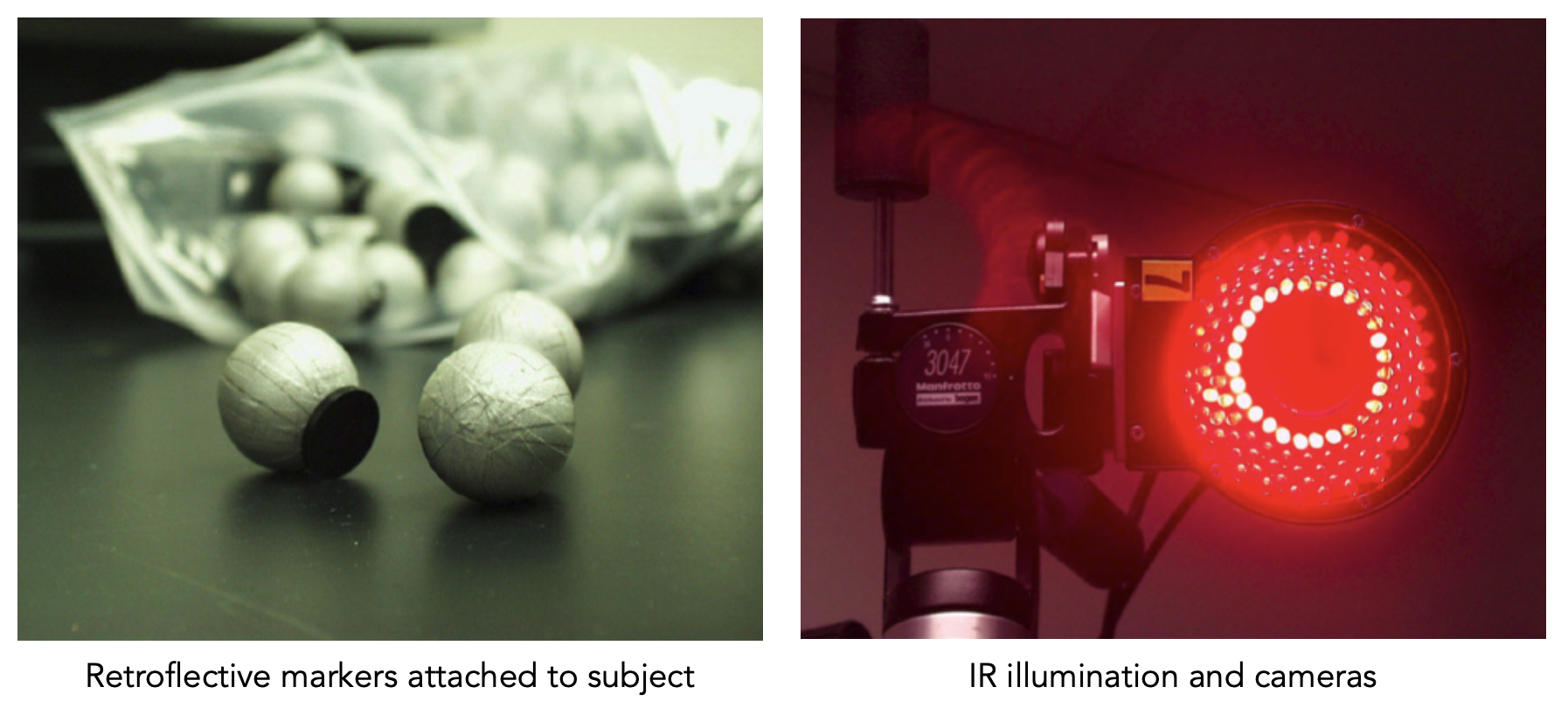
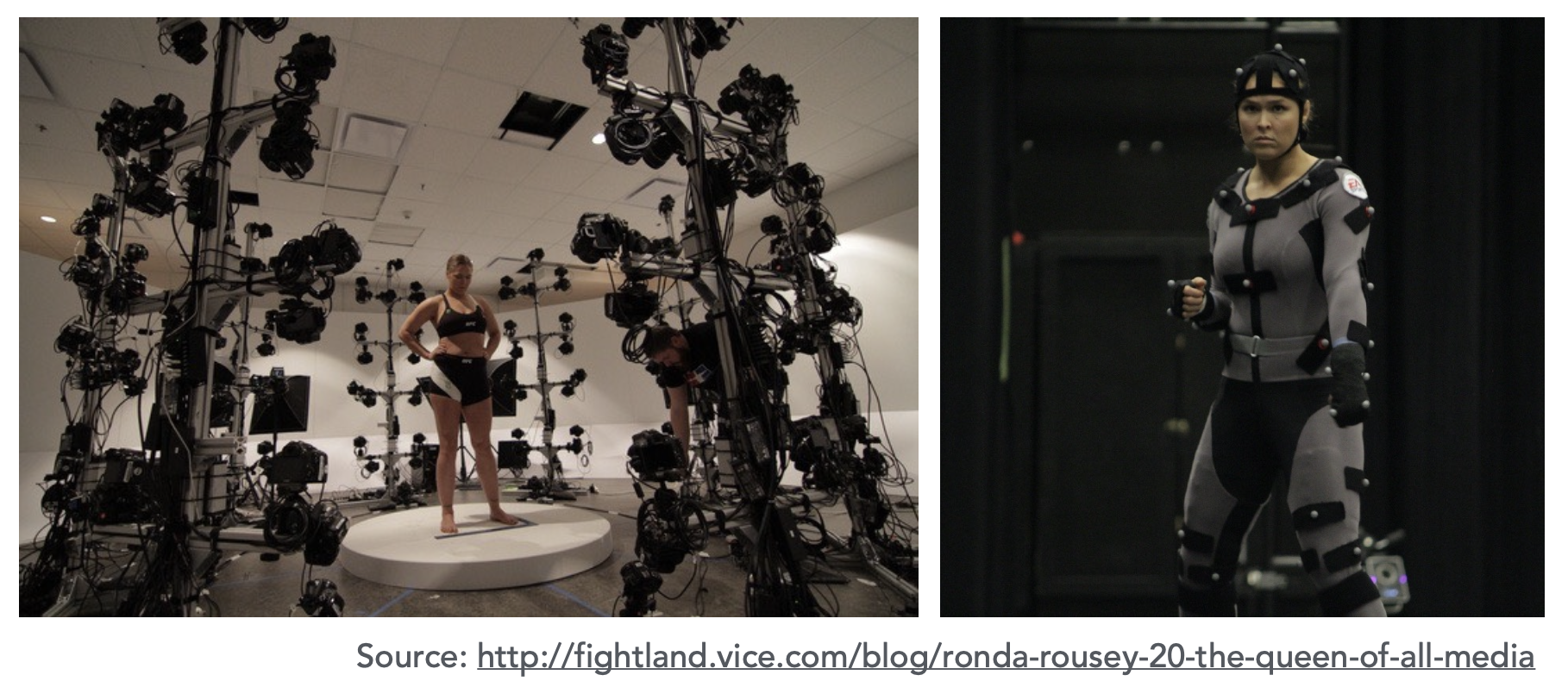
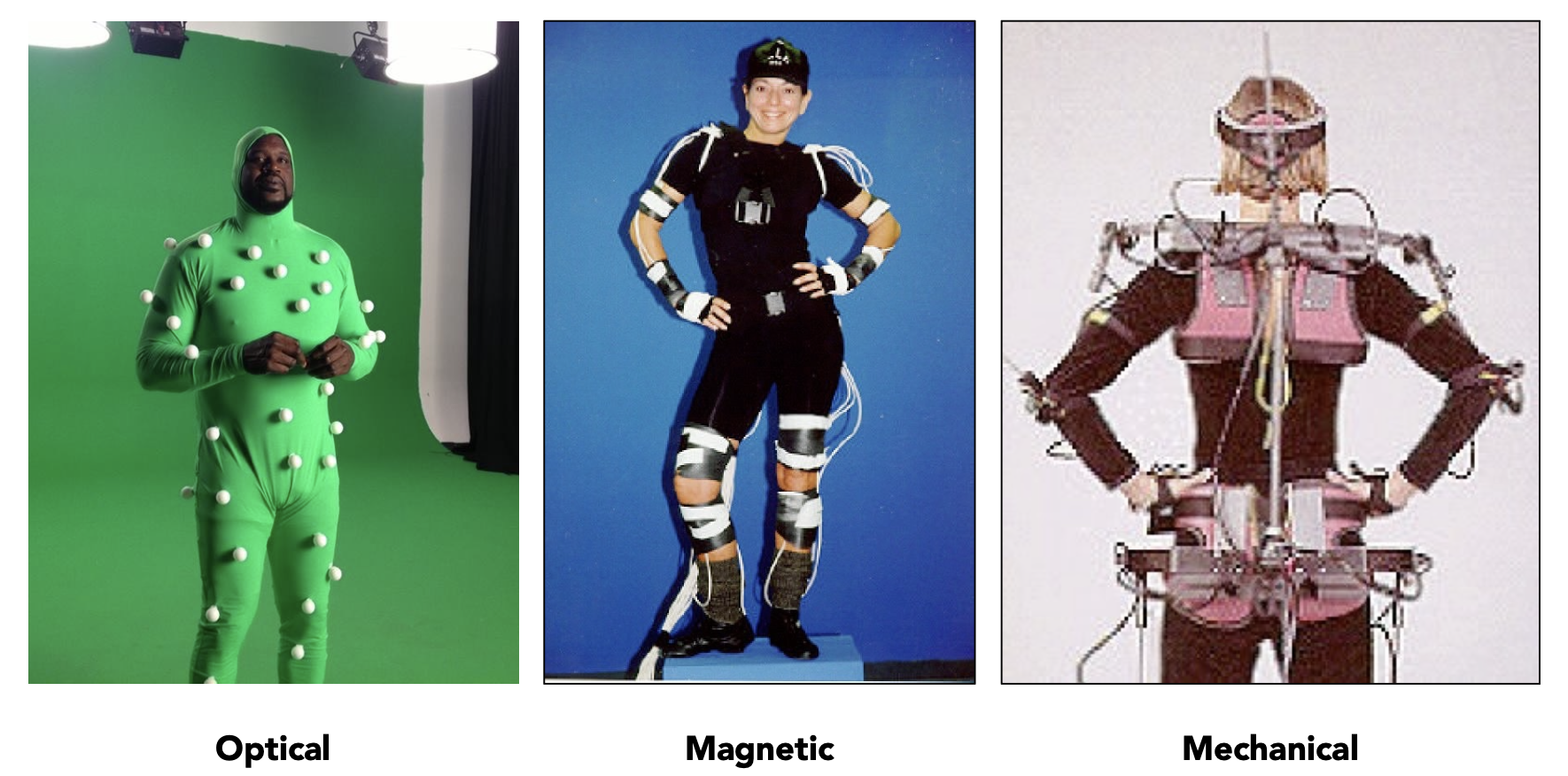
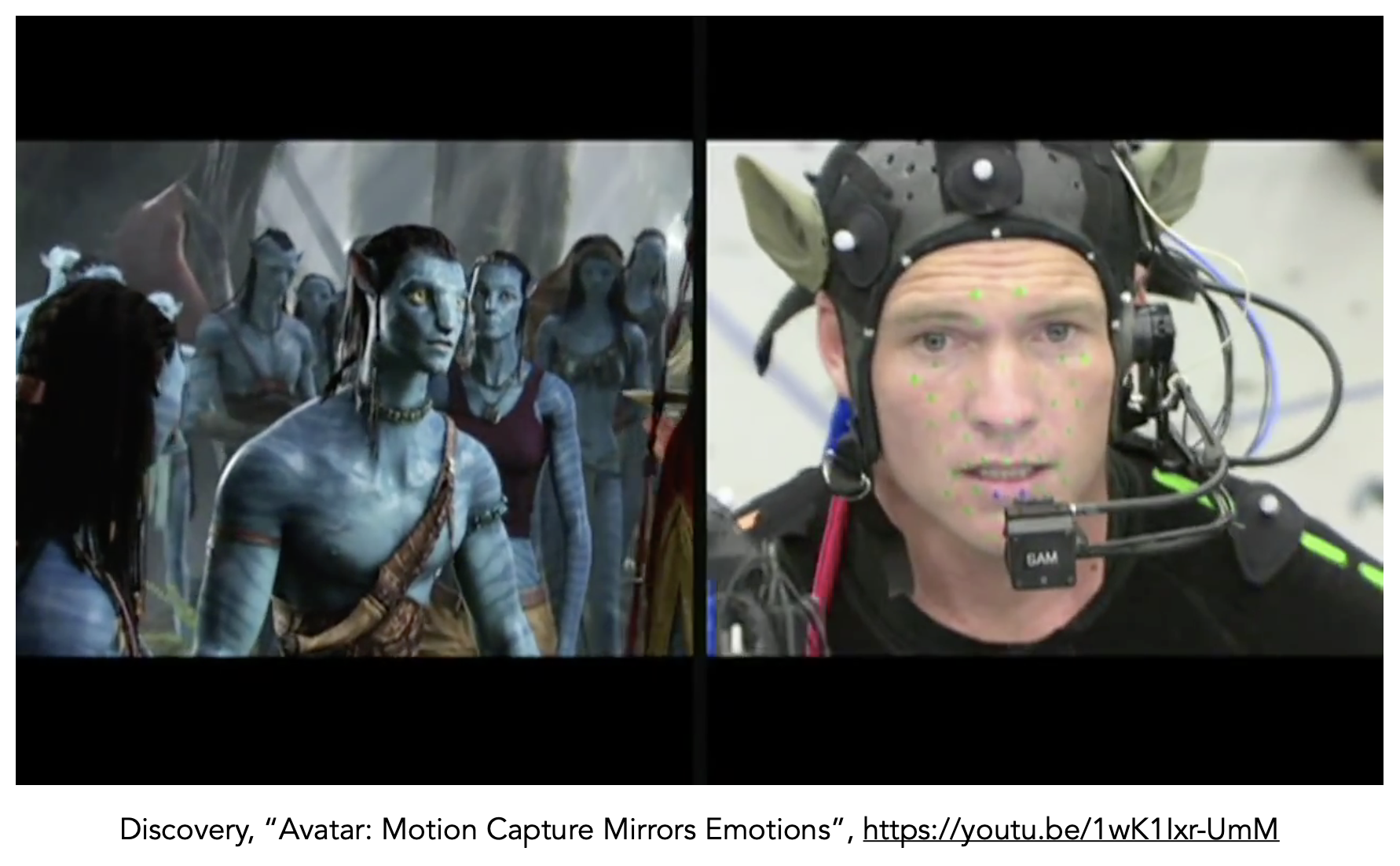
动作捕捉的装置有:
-
光学(optical) 装置
- 在捕捉对象上添加标记物(如下图所示的白色小球)
- 通过多台摄像机进行三角测量定位
- 8 台以上的相机,240 Hz,遮挡困难
例子
-
磁性(magnetic) 装置:感知磁场以推断位置 / 方向,并且是有线连接的
- 机械(mechanical) 装置:直接测量关节角度,但运动受限
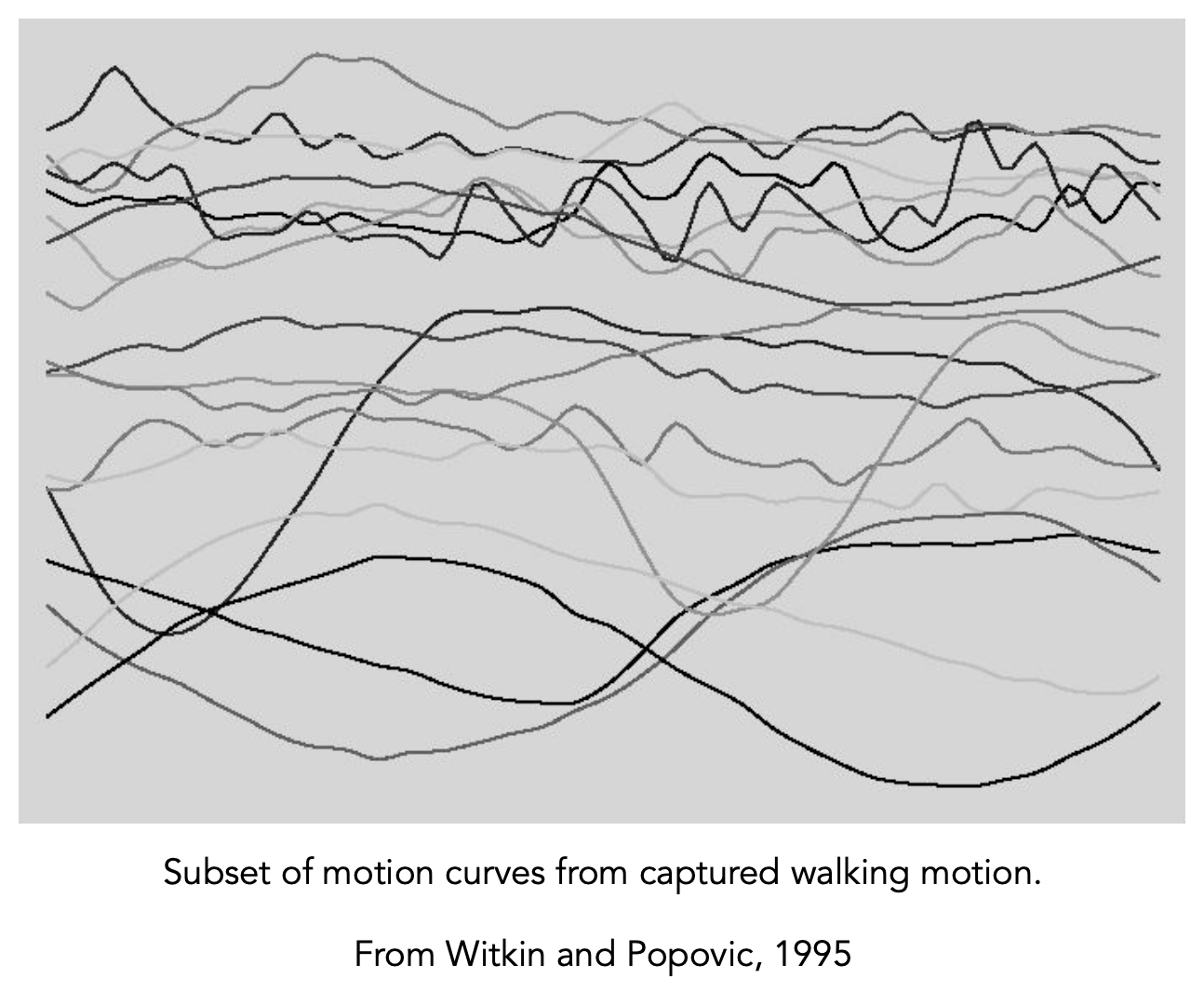
捕捉到的动作数据:
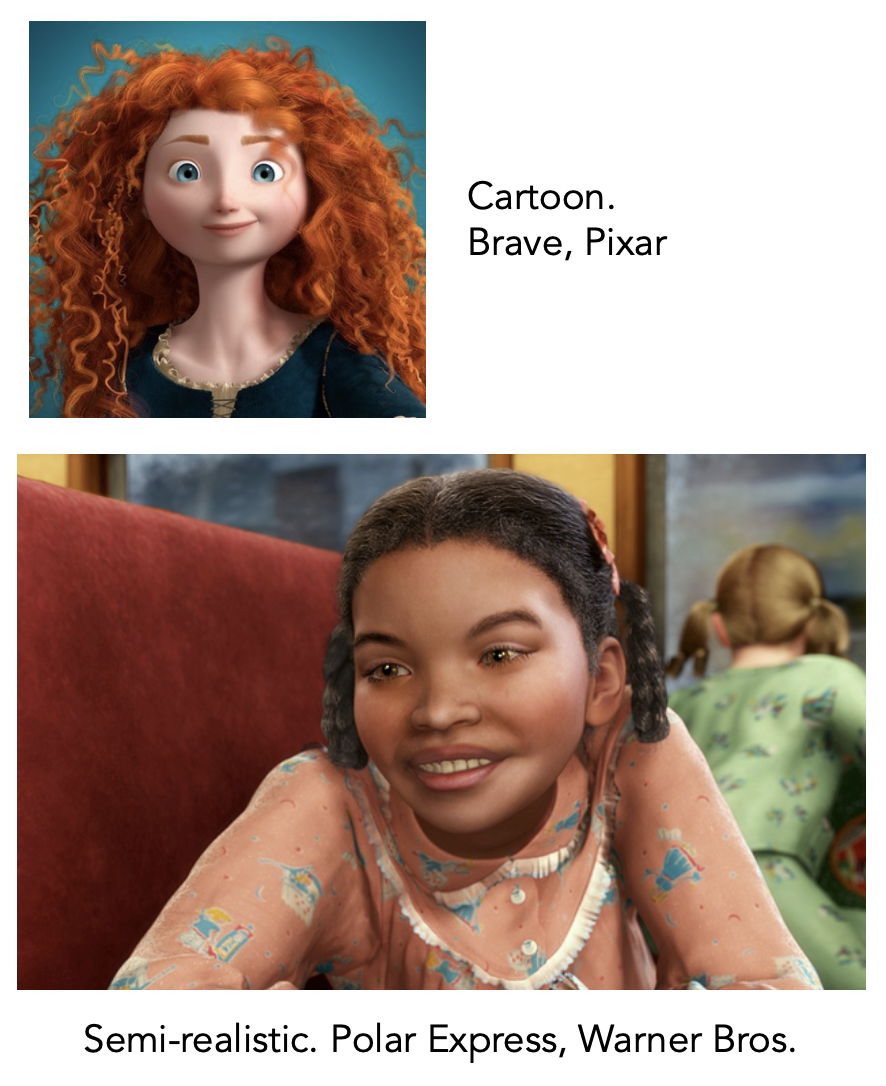
面部动画遇到的挑战——恐怖谷效应(uncanny valley):在机器人技术和图形学领域中,当人造角色的外观接近人类的真实感时,我们的情感反应会转为负面,直至其表达达到足够逼真的水平。
例子:面部动作捕捉
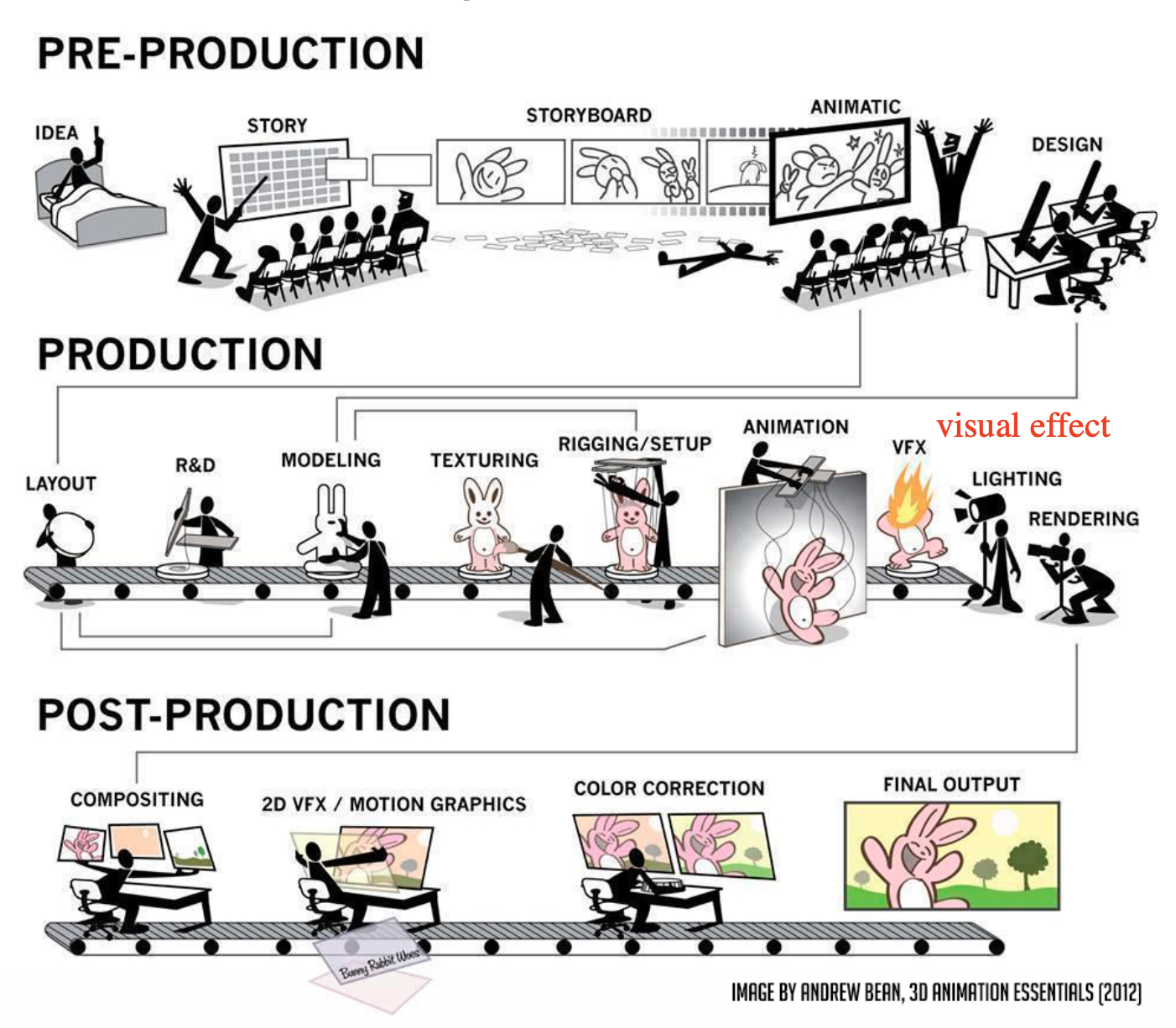
总结:动画生产流程
Single Particle Simulation⚓︎
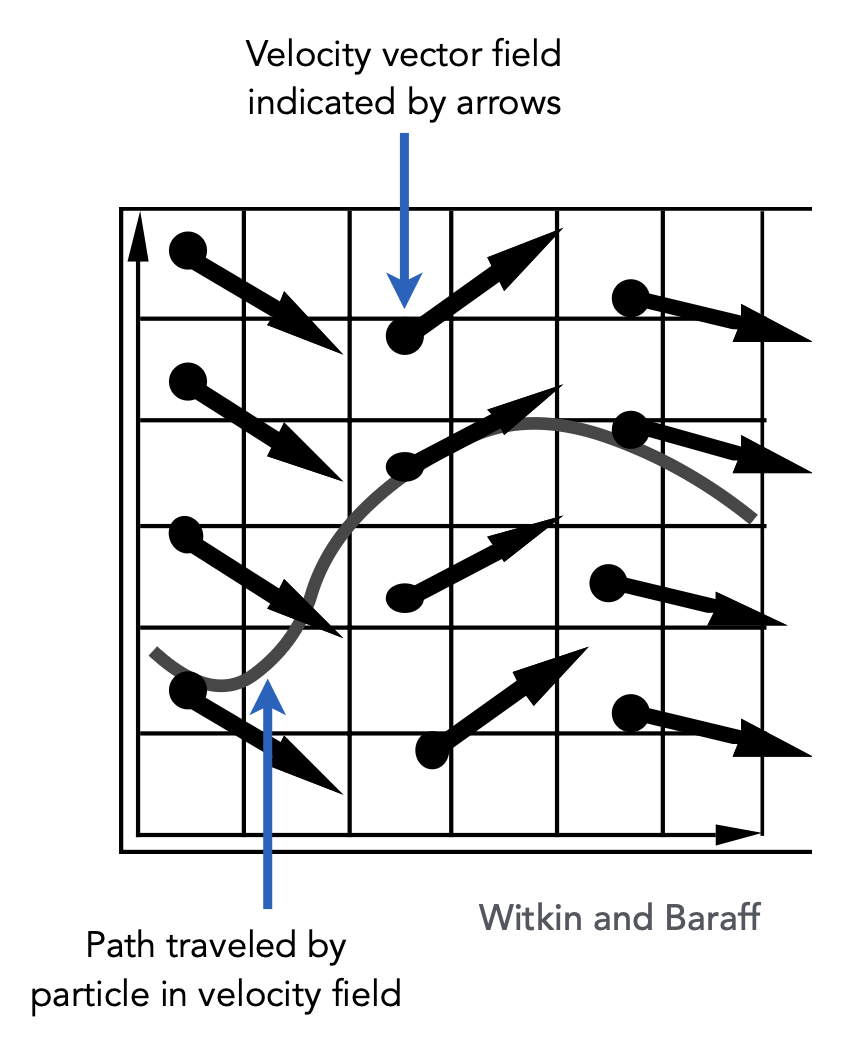
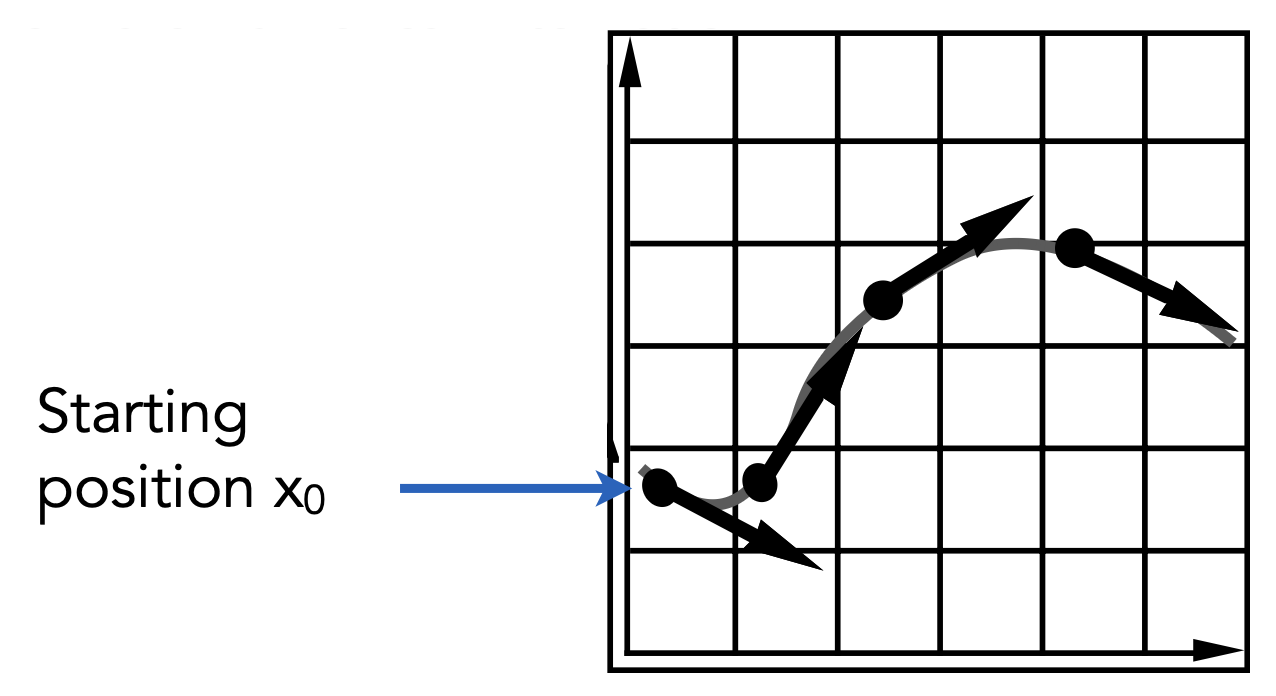
前面介绍过如何用粒子系统模拟物体运动,接下来就从微观角度学习具体如何让单个粒子运动。现在我们假设粒子的运动取决于一个速度向量场(velocity vector field),这是一个关于位置和时间的函数,记作 \(v(x, t)\)。在图中,速度向量用箭头表示,而用曲线表示粒子在场中的运动。
要想计算粒子随时间变化过程中所处的位置,就是在求解一个一阶常微分方程(first-order ordinary differential equation, ODE) 问题: $$ \dfrac{dx}{dt} = \dot{x} = v(x, t) $$
- “一阶”的意思是计算过程中要用到一阶导数
- “常”的意思是没有偏微分计算,即 \(x\) 是一个仅关于 \(t\) 的函数
我们可以通过正向数值积分的方法,在给定初始粒子位置 \(x_0\) 的条件下求解 ODE
下面就来介绍一些具体解法。
Euler Method⚓︎
第一种方法是欧拉法(Euler method)(又称前向(forward) 欧拉或显式(explicit) 欧拉法
- 一种简单的迭代法
- 常用
- 但非常不准确
- 且经常出现不稳定(unstable) 的情况
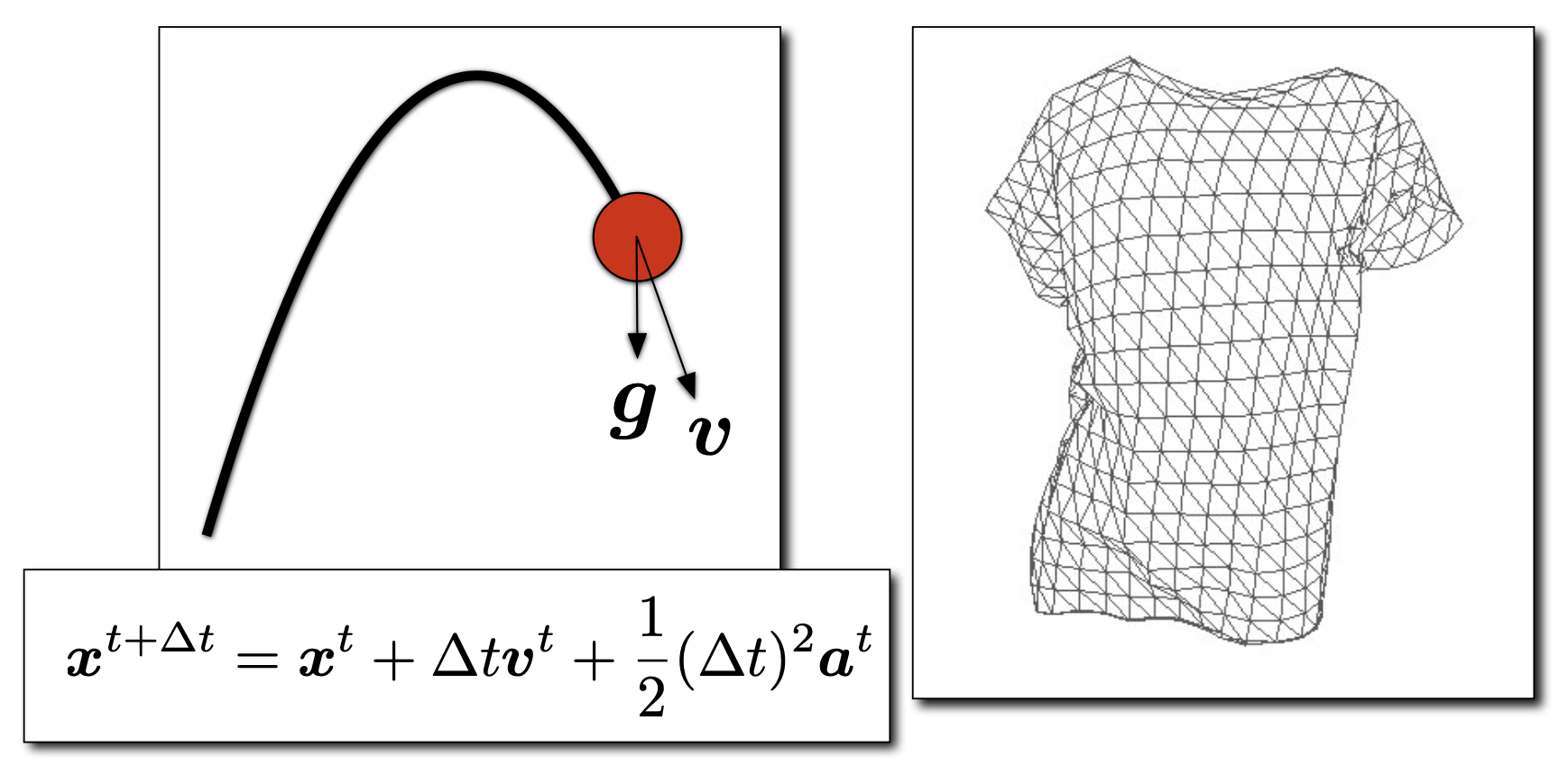
欧拉法的公式如下(在已知当前时刻位置的情况下,求解下一刻(仅相隔微小间隔)的位置
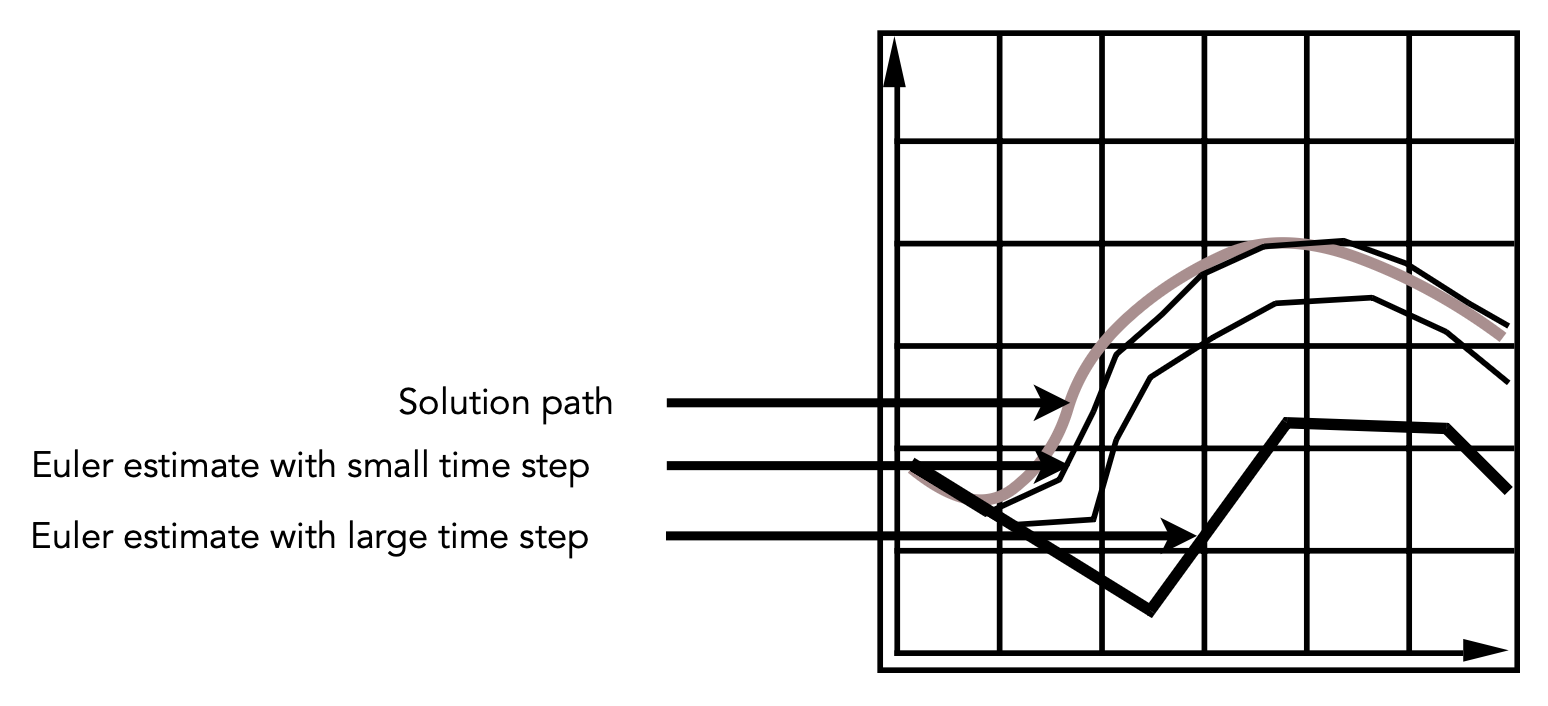
由于数值积分的过程会不断积累误差,因此在欧拉法基础上做积分的结果通常很糟。如下图所示,时间间隔取得太大的话,就和真实运动路径相去甚远。
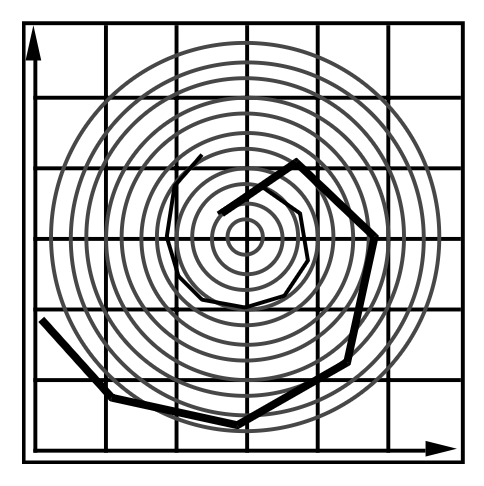
对于稳定性,欧拉法带来的关键问题是模拟运动发散的情况,这是不稳定性导致的常见却严重的问题,比如:
-
理论上应该严格沿螺旋线移动,但按照欧拉法就会跑到螺旋线外
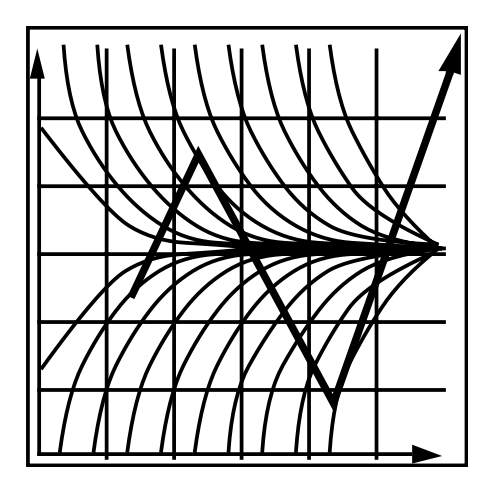
-
理论上粒子的运动会收敛到中间这条水平线,但用欧拉法粒子的振荡会越来越大(类似信号处理的正反馈)
Errors and Instability⚓︎
一般来说,通过有限差分进行数值积分求解会引发两个问题:
- 误差
- 每时间步长下的误差会积累,因此随着模拟的进行,精度会逐渐降低
- 但在图形学应用中,精度不是关键问题
- 不稳定
- 误差可能会累积,导致模拟结果偏离实际,即便底层系统本身并未发生改变
- 稳定性缺失是模拟中不可被忽视的基本问题
所以人们想出很多对抗这种不稳定性的方法,下面将会一一介绍。
Midpoint Method⚓︎
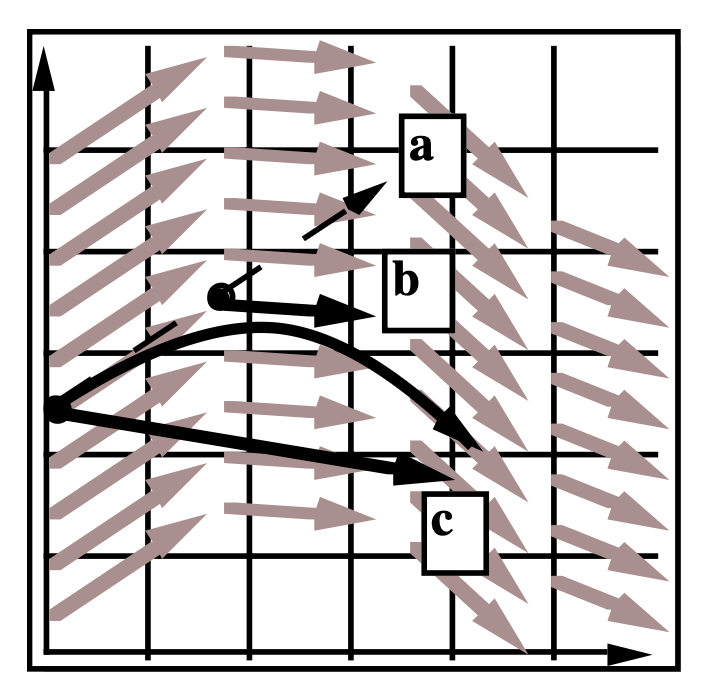
中点法的思路是:
- 先用欧拉法计算下一步后的位置(a)
- 然后计算当前位置和下一步位置中间位置的导数(b)
- 最后使用这个导数来更新真正的下一步位置(c)
公式如下:
Modified Euler⚓︎
改进欧拉法(modified Euler) 的思路是:
- 用下一步前后位置的速度的平均值作为下一步的速度
- 能得到更好的结果
公式如下:
Adaptive Step Size⚓︎
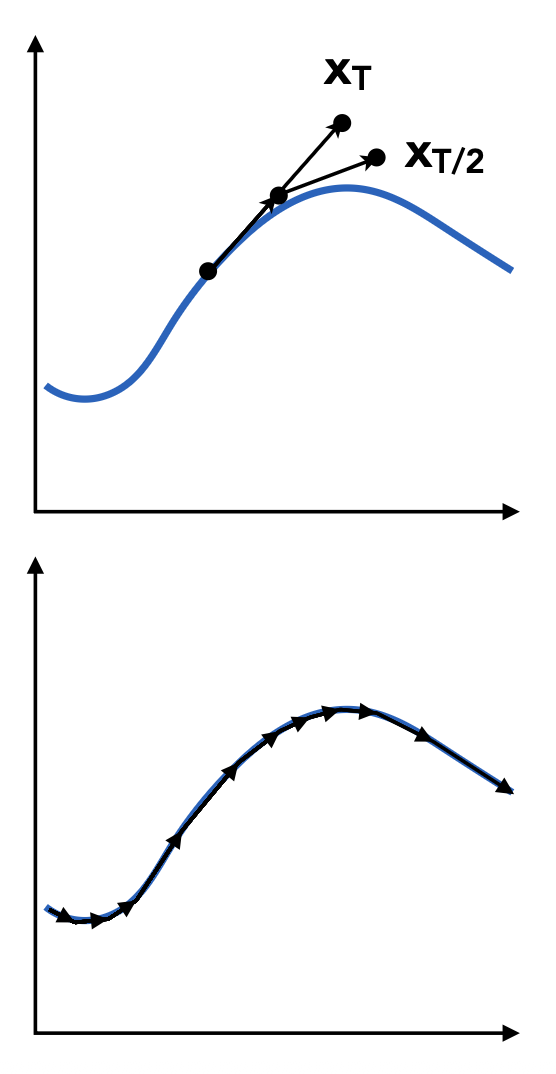
自适应步长(adaptive step size) 是一种基于误差估计选择步长的非常实用的一门技术。一个小问题是有可能需要很小的步长。其基本思路如下——重复以下步骤,直到误差小于阈值:
- 使用欧拉法得到 \(T\) 时刻下的位置 \(x_T\)
- 使用欧拉法得到 \(T/2\) 时刻下的位置 \(x_{T/2}\)
- 计算误差 \(\|x_T - x_{T/2}\|\)
- 若误差仍大于阈值,则减小步长并再次尝试
Implicit Euler Method⚓︎
隐式欧拉法(implicit Euler method)(非正式的称呼为反向法(backward method))不同于一般的欧拉法,它利用的不是当前位置下的速度,而是未来位置上的速度。对于当前步,公式如下:
问题转化为求解关于 \(\bm{\dot{x}}^{t + \Delta t}, \bm{\ddot{x}}^{t + \Delta t}\) 的非线性问题。对于这类问题可以使用诸如牛顿法(Newton's method) 等寻根 (root-finding) 算法求解。
隐式欧拉法通常能得到好得多的稳定性。
说了那么多,其实我们还没有定义过,或者量化过“稳定性”这一概念。实际上,稳定性通常用局部截断误差(local truncation error)(对于每一步)和总累积误差(total accumulated error)(总体)来量化。我们不关心误差的绝对值,关心的是误差关于步长的阶数。
- 隐式欧拉法的误差是一阶的,这意味着(\(h\) 表示步长,即 \(\Delta t\))
- 局部截断误差:\(O(h^2)\)
- 总累积误差:\(O(h)\)
- 可以这样理解 \(O(h)\):如果步长减少一半,那么误差也会减少一半;所以误差阶数是越大越好
Runge-Kutta Families⚓︎
龙格 - 库塔法(Runge-Kutta families) 是一组用于求解 ODE 的高级方法,尤其适用于求解非线性问题。其中它的四阶版本是最常用的,即 RK4。
- 初始条件:\(\dfrac{dy}{dt}=f(t,y),\quad y(t_0)=y_0\)
-
RK4 的解:
\[ \begin{aligned}&y_{n+1}=y_n+\frac{1}{6}h\left(k_1+2k_2+2k_3+k_4\right),\\&t_{n+1}=t_n+h\end{aligned} \]其中:
- \(k_1 = f(t_n, y_n)\)
- \(k_2=f\left(t_n+\dfrac{h}{2},y_n+h\dfrac{k_1}{2}\right)\)
- \(k_3=f\left(t_n+\dfrac{h}{2},y_n+h\dfrac{k_2}{2}\right)\)
- \(k_4=f\left(t_n+h,y_n+hk_3\right)\)
Position-based / Verlet Integration⚓︎
最后介绍一种不是基于物理的方法——基于位置的 / Verlet 积分,它的思路是:
- 使用改进欧拉法计算前向步后,约束粒子位置,以阻止发散的、不稳定的行为
- 使用约束位置计算速度
- 这两个思路都会消耗运动粒子的能量,使之趋于稳定
特点:
- 快速简单
- 不基于物理实现能量损失,可能会有误差
注
以上内容和《数值分析》课程内容关系紧密,要想更深入地理解这些方法,最好去学一下相关知识。
Rigid Body Simulation⚓︎
对于刚体(rigid body) 模拟,它和模拟粒子运动类似,只是需要考虑更多刚体的性质。除了位置外,计算时还需考虑以下量:
- \(X\):位置
- \(\theta\):旋转角 (rotation angle)
- \(\omega\):角速度 (angular velocity)
- \(F\):力
- \(\Gamma\):扭矩 (torque)
- \(I\):转动惯量 (momentum of inertia)
可以用前面介绍的各种方法求出刚体在一段时间后出现的位置。
Fluid Simulation⚓︎
A Simple Position-based Method⚓︎
基于位置方法的关键思路是:
- 假设流体是由很小的刚体小球构成的
- 假设流体无法被压缩(即密度不变)
- 所以只要密度发生变化,就应该通过改变粒子位置来纠正
- 需要知道任何地方上密度关于粒子位置的梯度
- 用梯度下降法更新
问题:流体运动可能会停不下来,需要人为增加能量损失。
Eulerian vs. Lagrangian⚓︎
下面给出模拟大量物体集合的常见的两种不同视角:
-
拉格朗日视角(质点法
) :盯着一个物体在不同时刻下的位置
-
欧拉视角(网格法
) :将空间划分为网格,盯着一个网格在不同时刻下出现的物体 >和前面介绍的欧拉法没半毛钱关系...
Material Point Method⚓︎
物质点法(material point method, MPM) 是一种结合欧拉和拉格朗日视角的混合方法:
- 拉格朗日:考虑带有材料属性的粒子运动
- 欧拉:对某个网格做数值积分
- 交互:粒子将属性传递到网格,网格执行更新,然后插值回粒子
评论区