Recognition⚓︎
约 3399 个字 预计阅读时间 17 分钟
核心知识
只需了解基本概念即可,无需深入理解细节
- 语义分割
- 降采样 + 升采样(反池化、转置卷积)
- U-Net
- DeepLab
- 评估指标:IoU
- 目标检测
- 包围盒
- 区域建议
- 双阶段目标检测:R-CNN、快速 R-CNN、更快的 R-CNN
- 单阶段目标检测:YOLO
- 实例分割
- 掩码 R-CNN
- 全景分割
- 人体姿态估计
- 深度传感器
- 单人:热图
- 多人:掩码 R-CNN(自顶向下
) 、OpenPose(自底向上)
- 其他任务
- 光流
- 视频分类
- 多目标追踪
Semantic Segmentation⚓︎
语义分割(semantic segmentation) 描述的是这样一个问题:
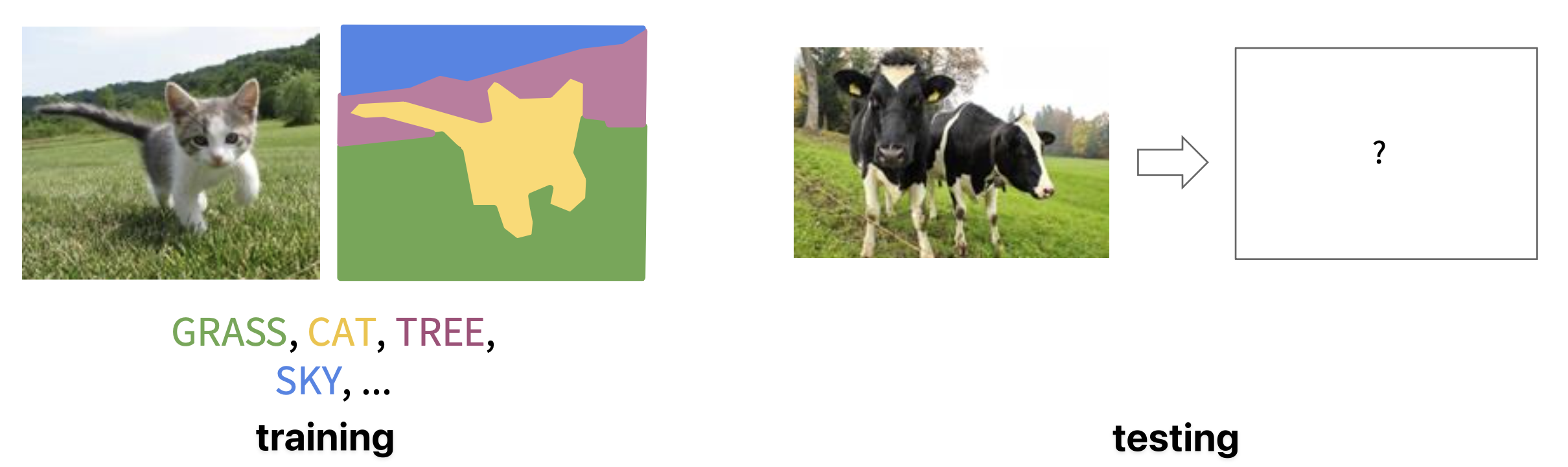
- 成对的训练数据:对于每张训练图像,为每个像素标注一种语义类别 (semantic category)
- 测试时,对图像的每个像素分类
- 不区分实例,只关心像素
下面介绍一些可能的实现途径。
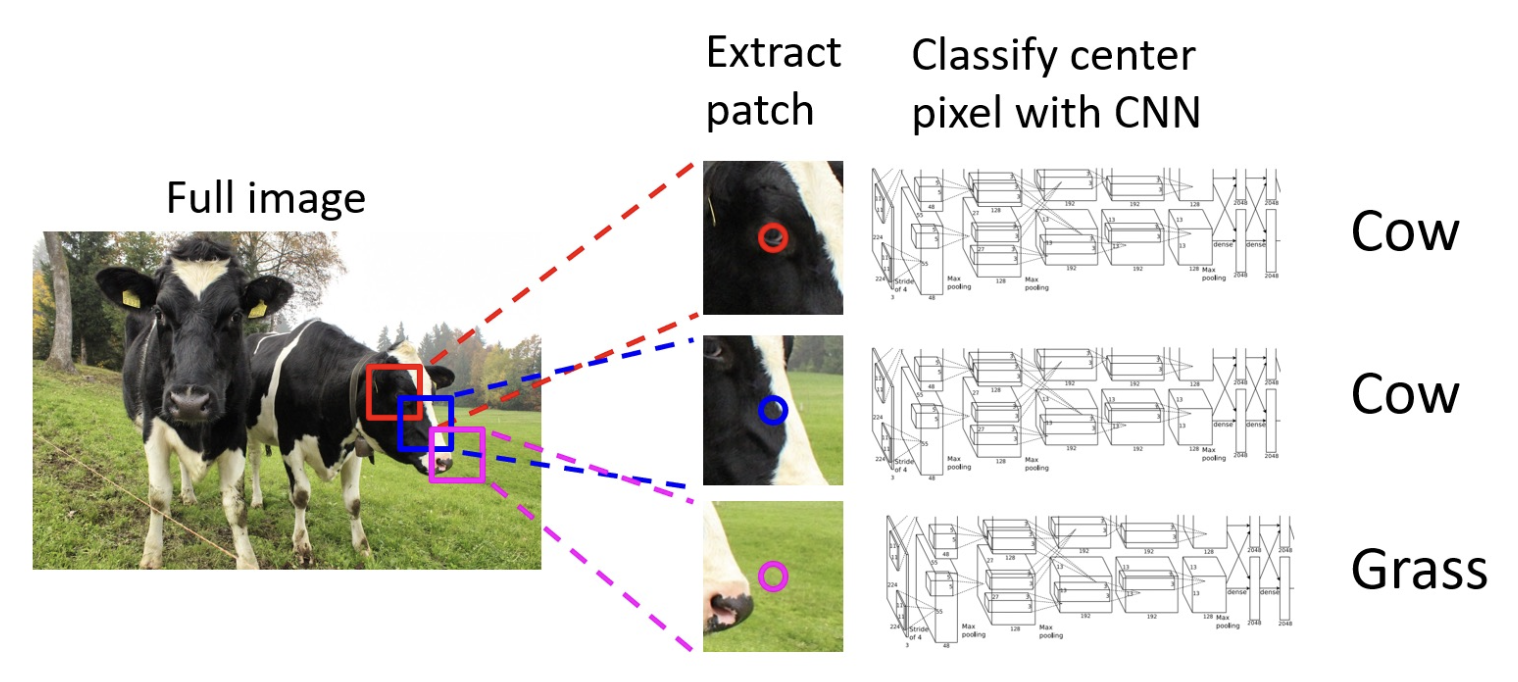
Sliding Windows⚓︎
滑动窗口(sliding window)
- 效率太低,无法在重叠块之间复用共享的特征
- 有限的感受野
Fully Convolutional Network⚓︎
卷积:
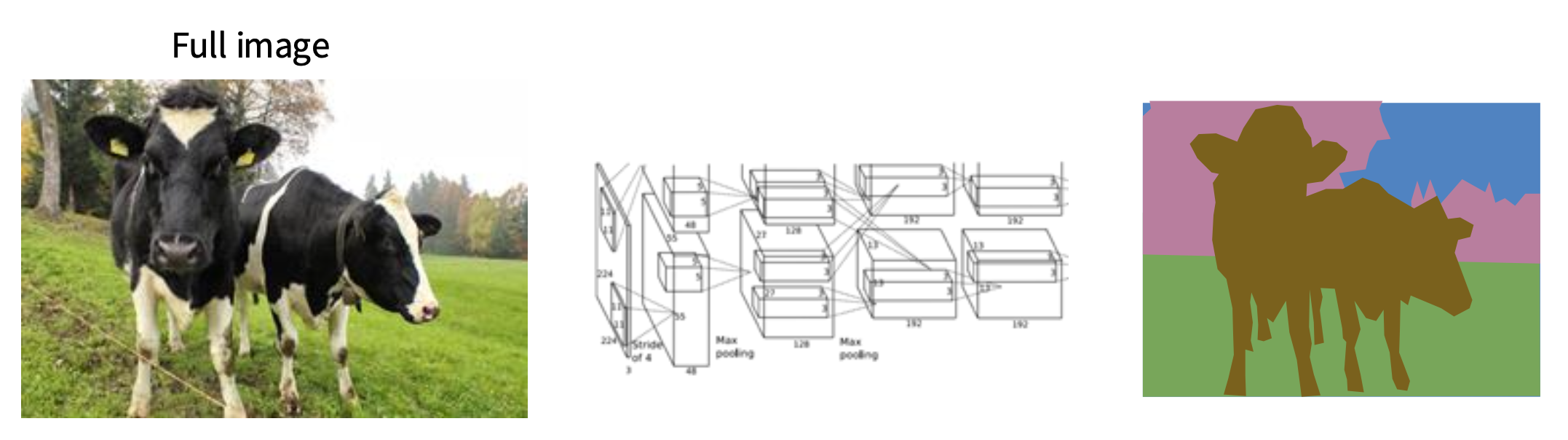
- 一种直观的思路:使用卷积网络编码整张图像,然后在结果上做语义分割
- 问题:用于分类任务的架构中通常通过减少特征空间大小来加深层次,但语义分割需要输出大小与输入大小相同
鉴于上述问题,我们可以设计一种全卷积网络(fully convolutional network):
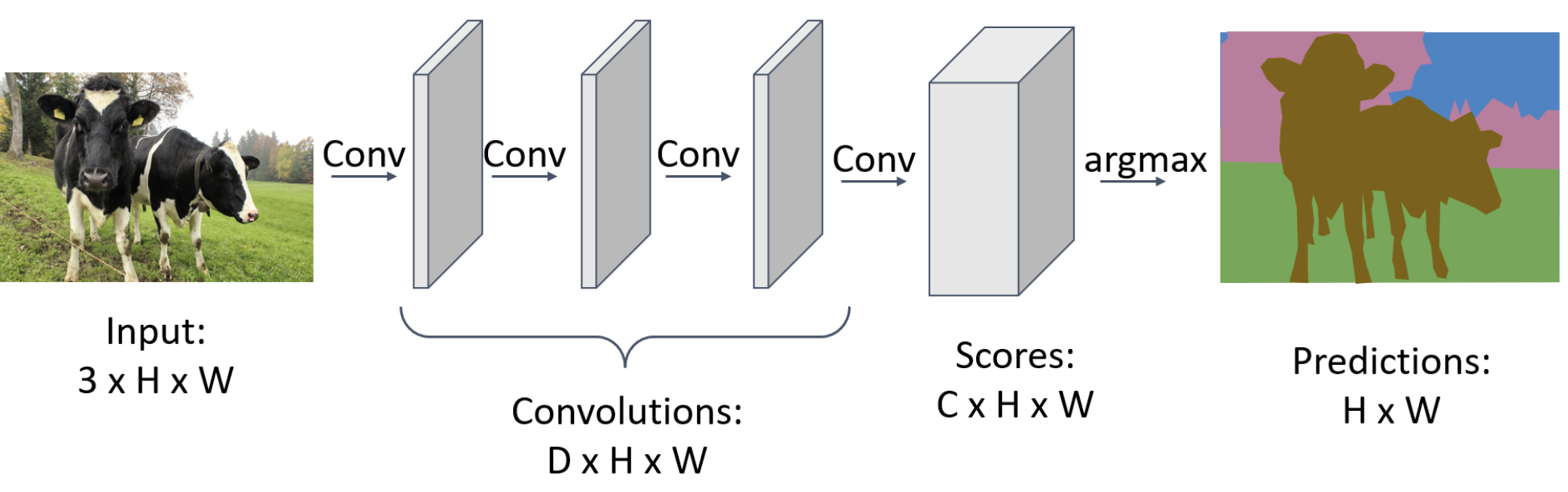
- 设计一个仅包含卷积层的网络,不使用降采样操作,以便一次性对所有像素进行预测
- 训练用的损失函数是逐像素的交叉熵
- 感受野和卷积层数量呈线性关系
- 问题:高分辨率的卷积成本高
Downsampling and UpSampling⚓︎
解决方案:将网络设计为一组卷积层,内部包含降采样和升采样
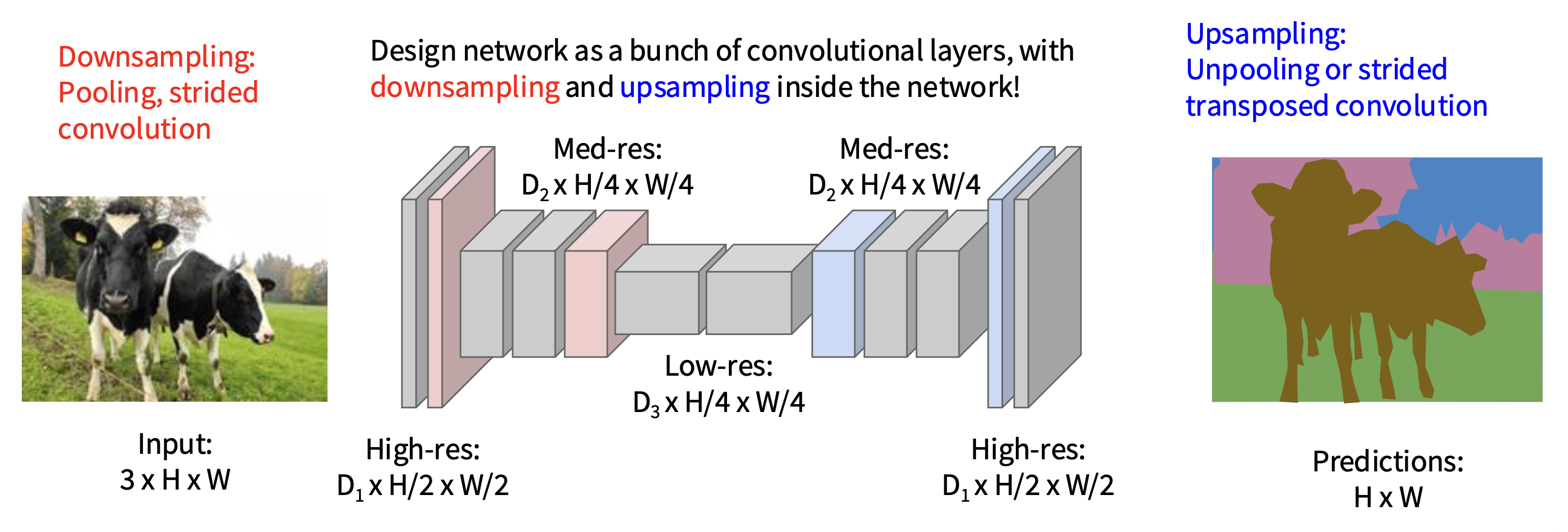
- 降采样(downsampling):池化(pooling)、步长卷积(strided conv)
-
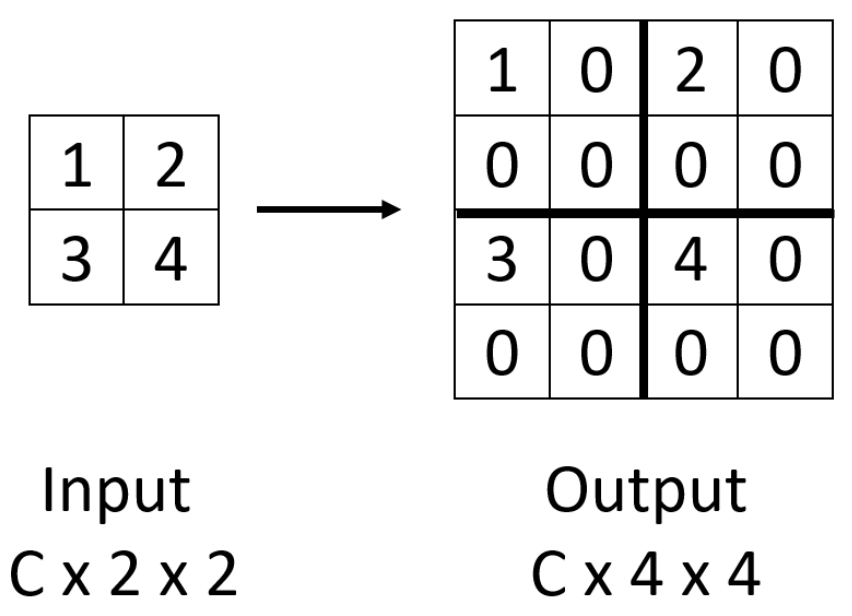
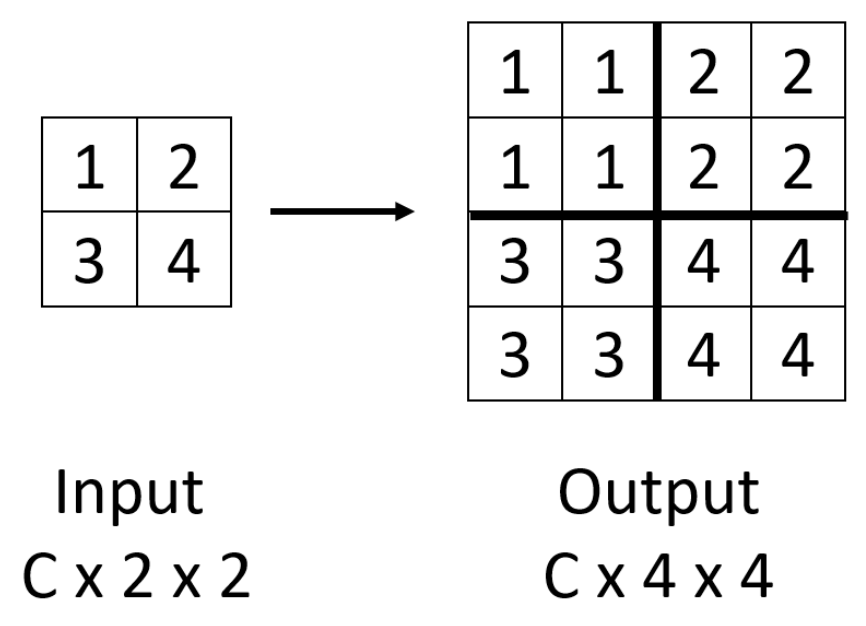
升采样(upsampling):
-
反池化(unpooling)
-
钉床(bed of nails)
-
最近邻居(nearest neighbors)
-
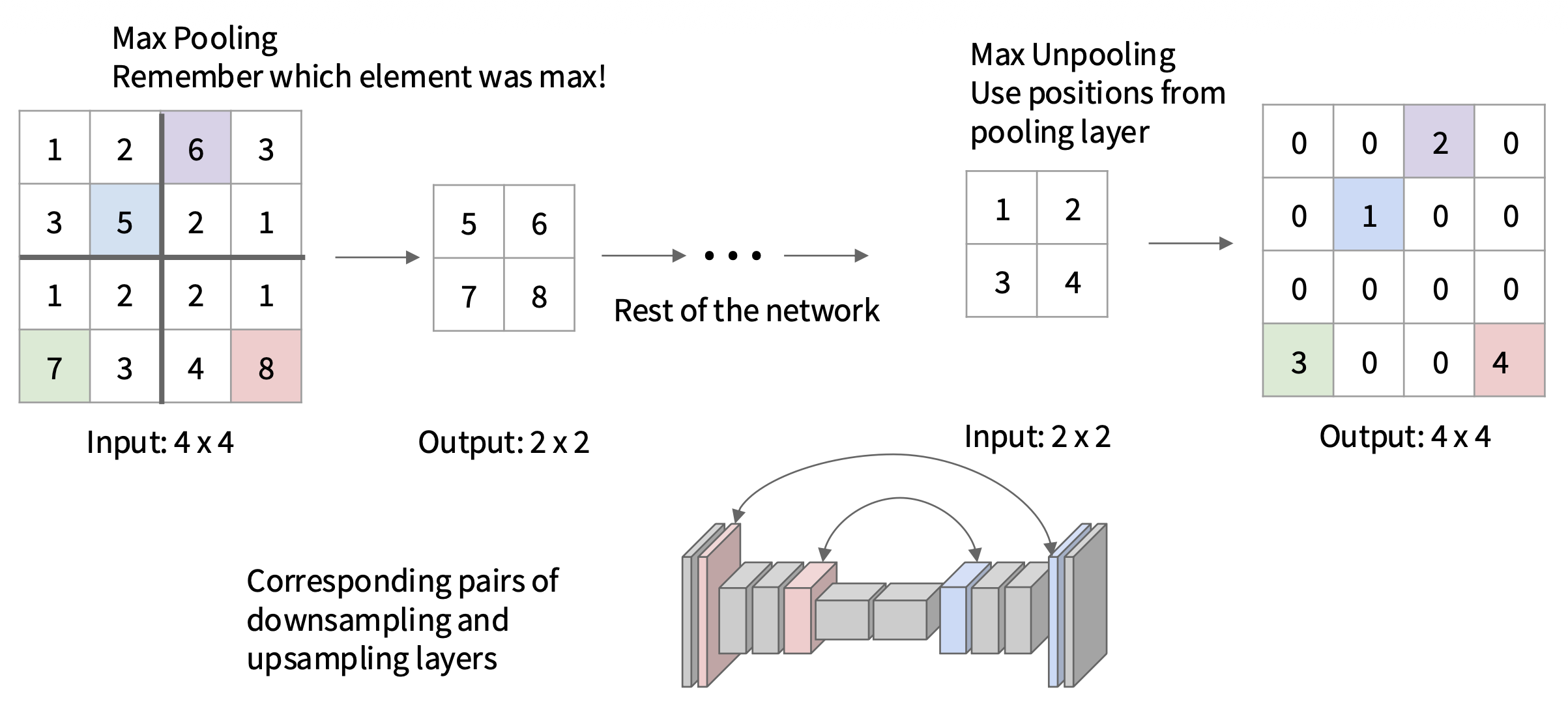
最大反池化(max unpooling):记住最大像素所在位置,之后升采样时保持该位置不变
-
双线性插值(bilinear interpolation)
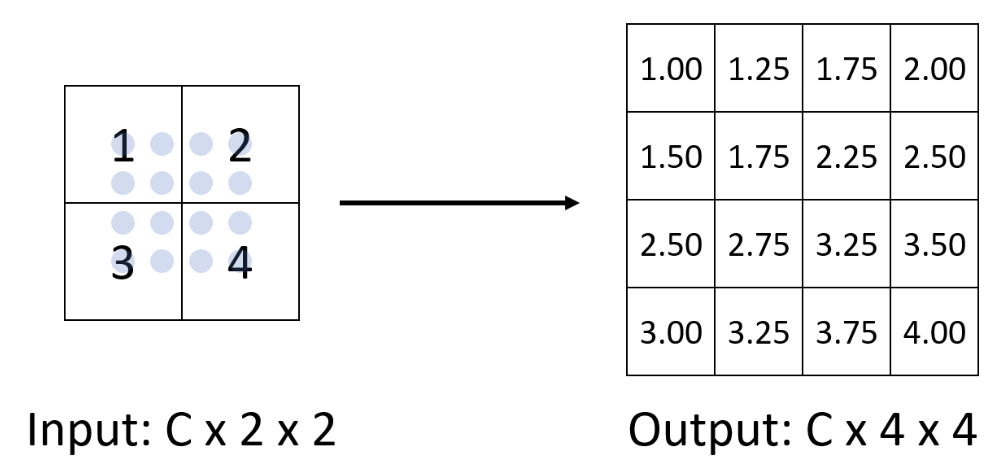
-
双三次插值(bicubic interpolation)
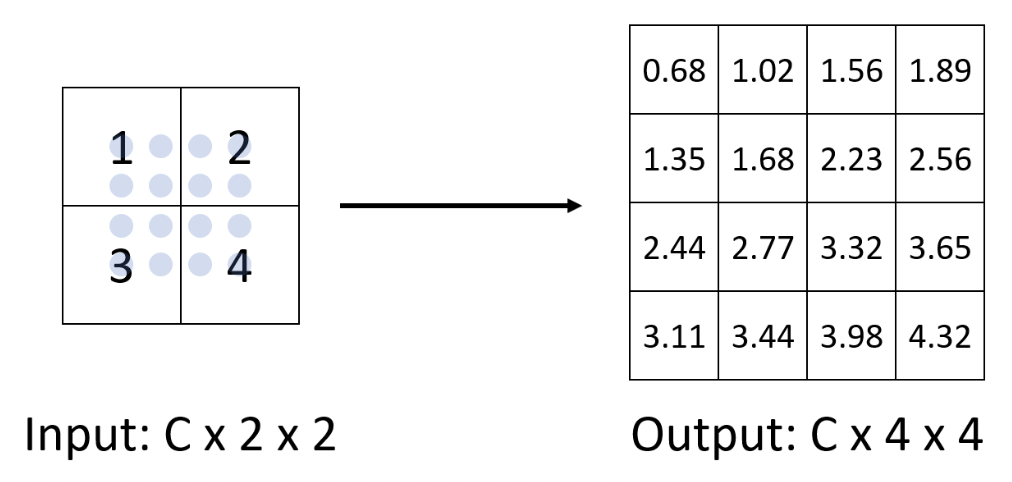
-
-
转置卷积(transposed convolution):反池化后再做卷积(因此这是一种可学习的反池化(leanable unpooling))
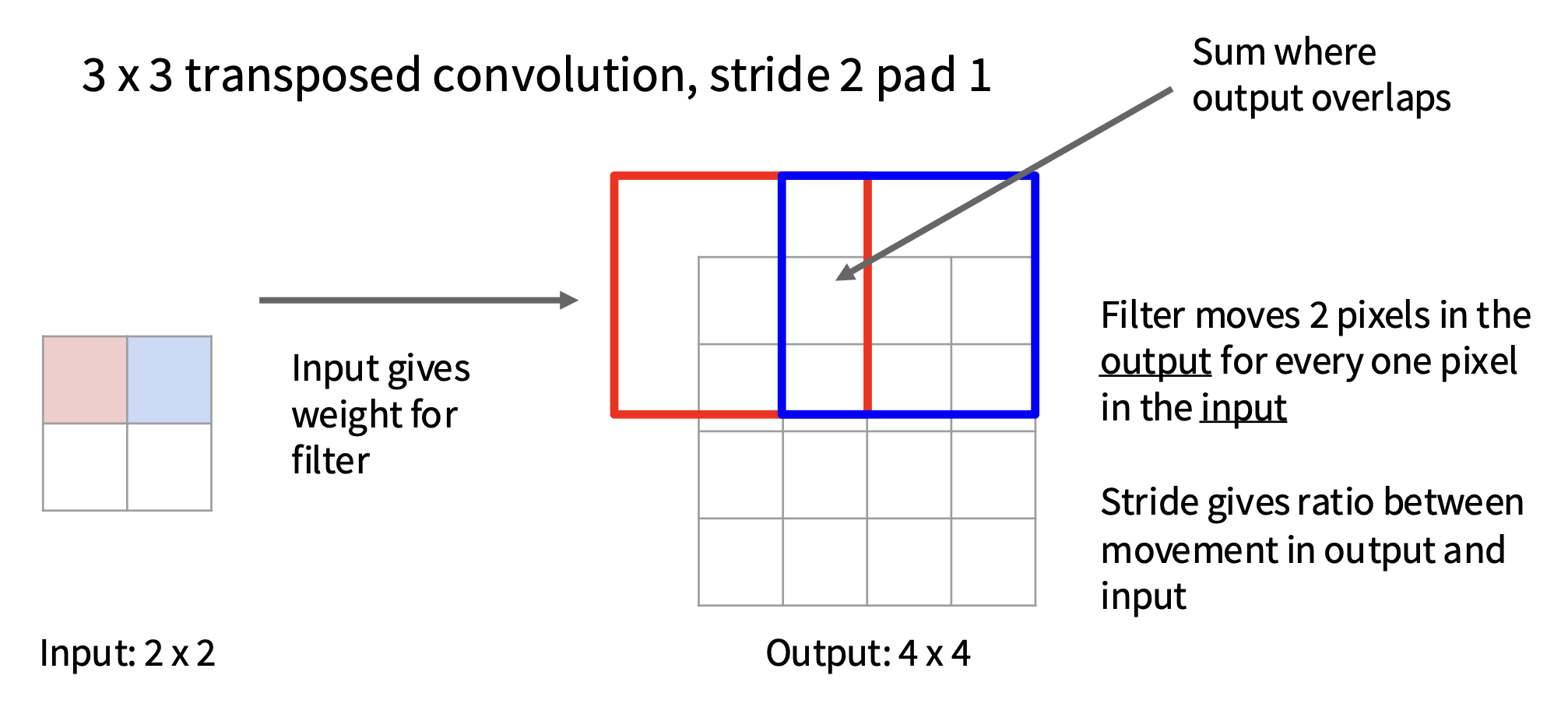
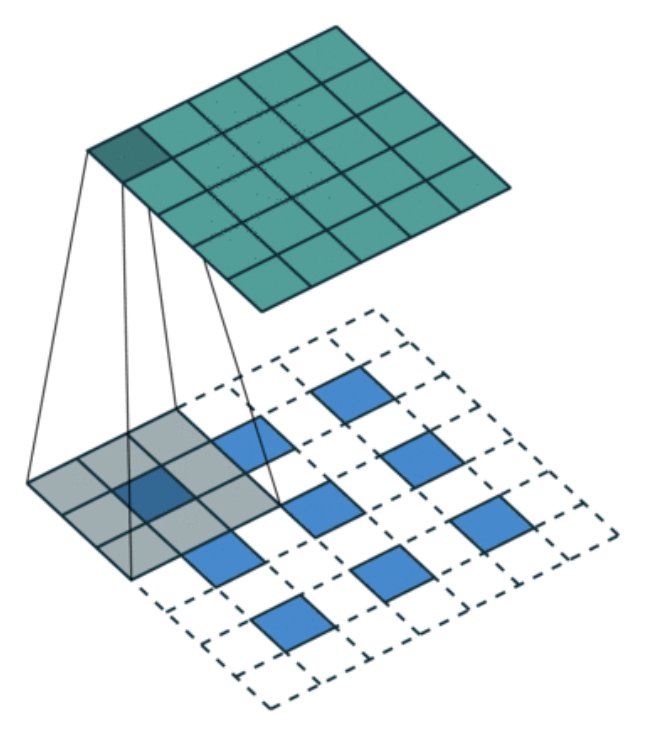
-
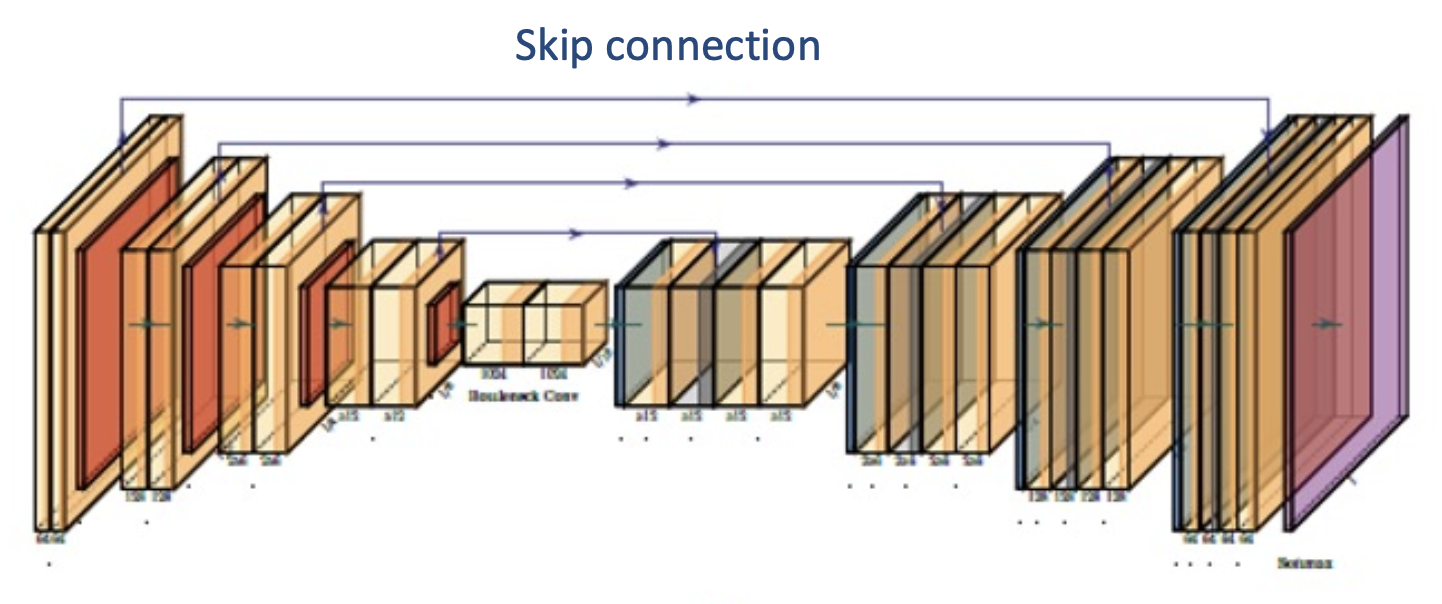
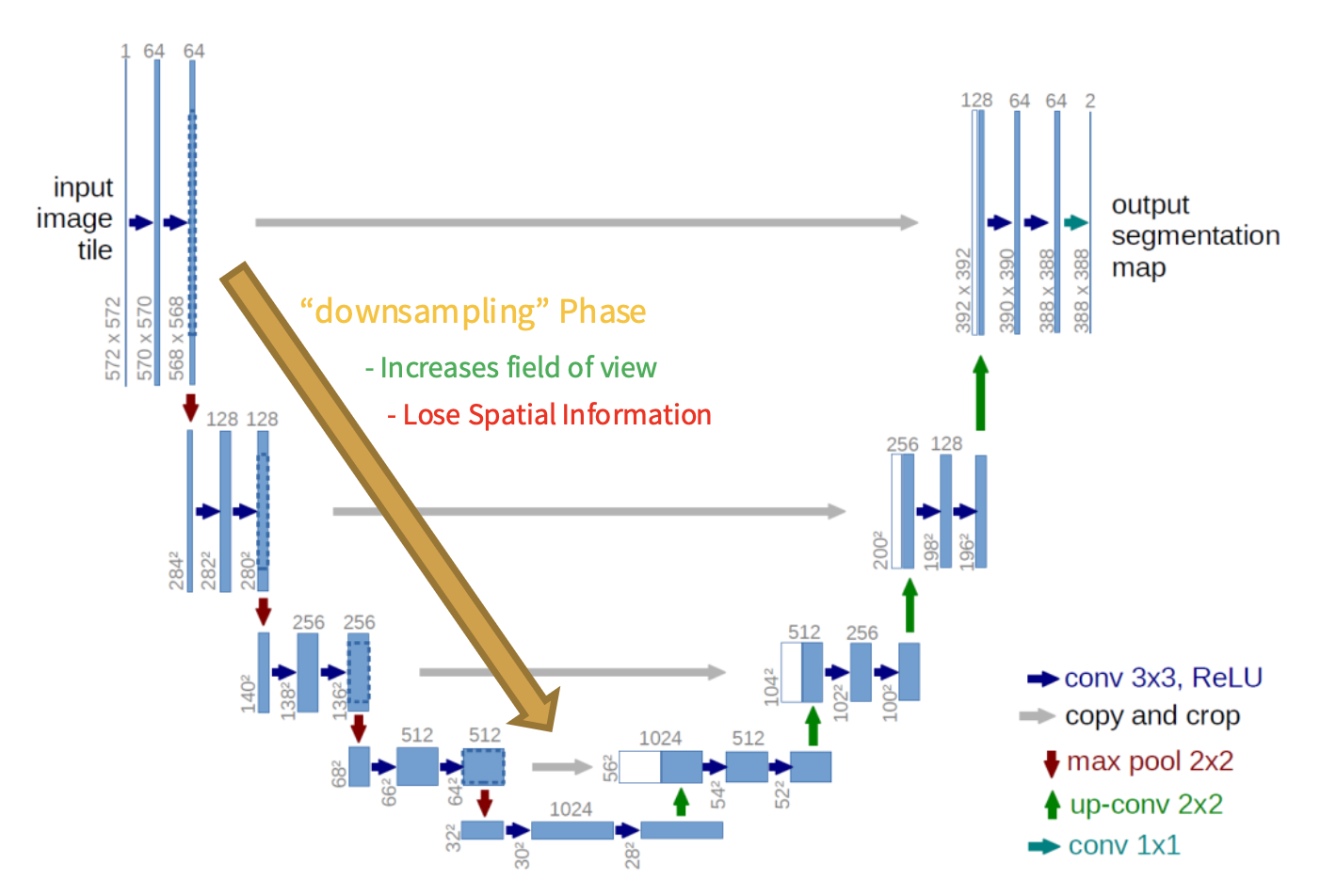
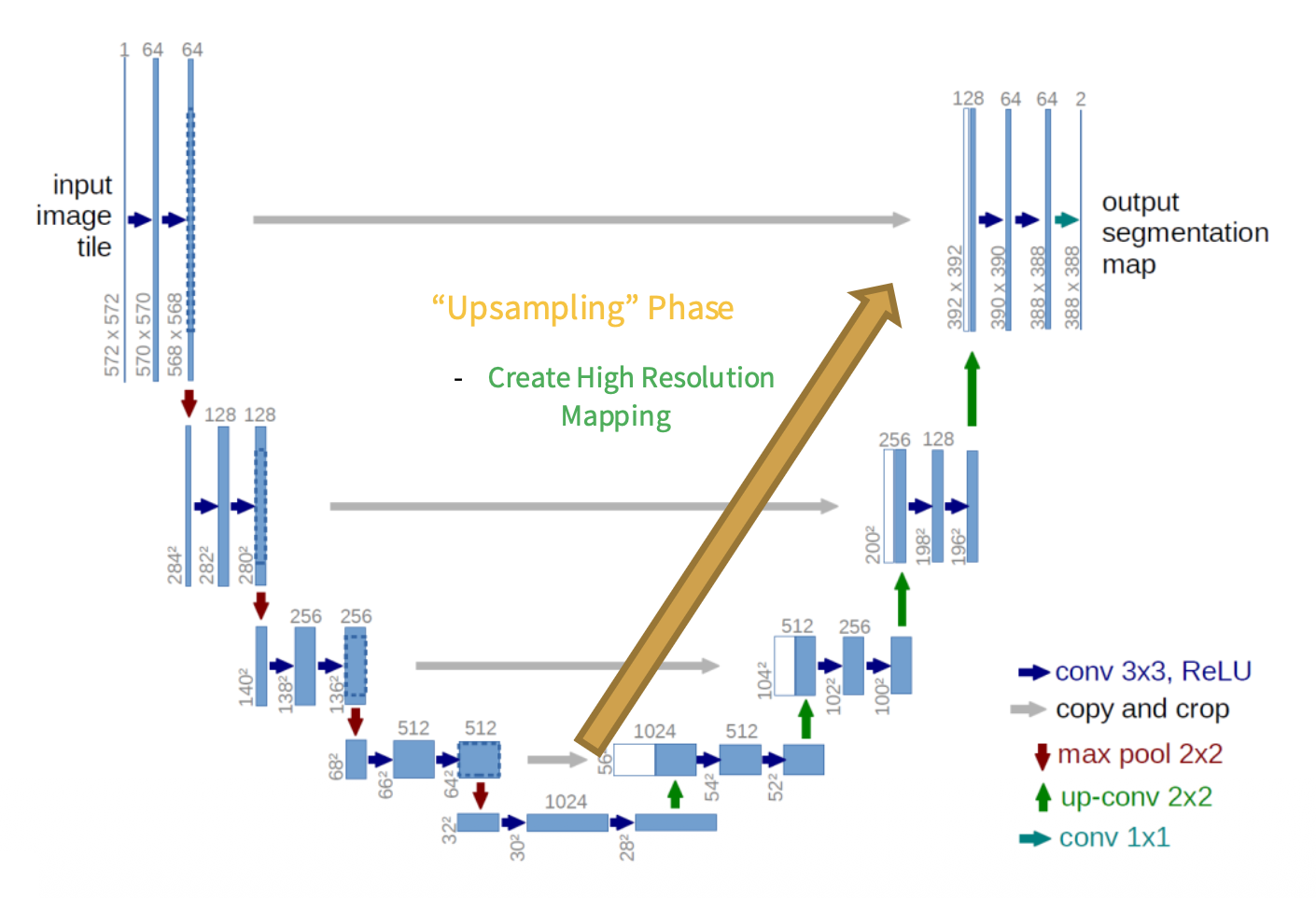
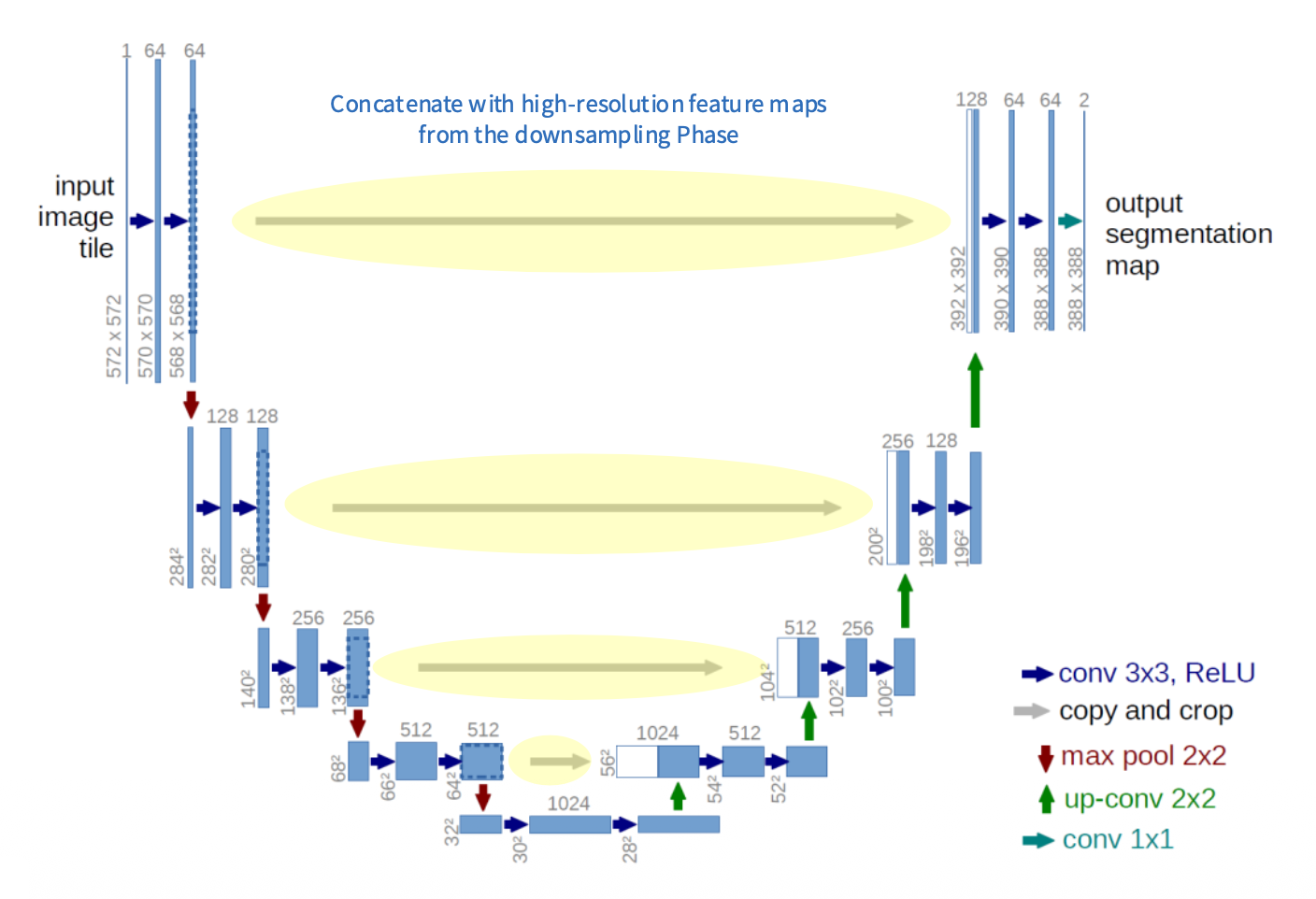
U-Net⚓︎
U-Net:通过降采样和升采样阶段之间的跳跃连接(skip connection),使得图像信息不会因降采样而丢失
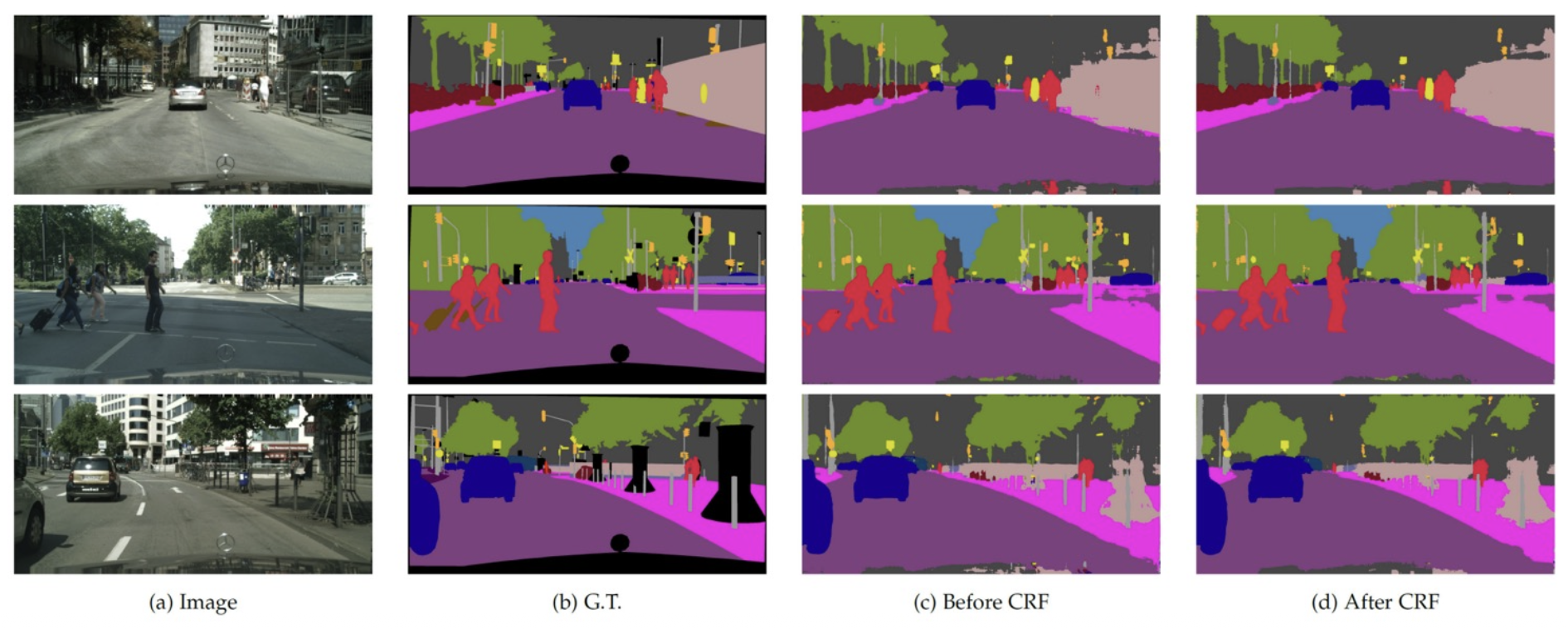
DeepLab⚓︎
DeepLab:FCN(全连接网络)+ CRF(条件随机场(conditional random field))
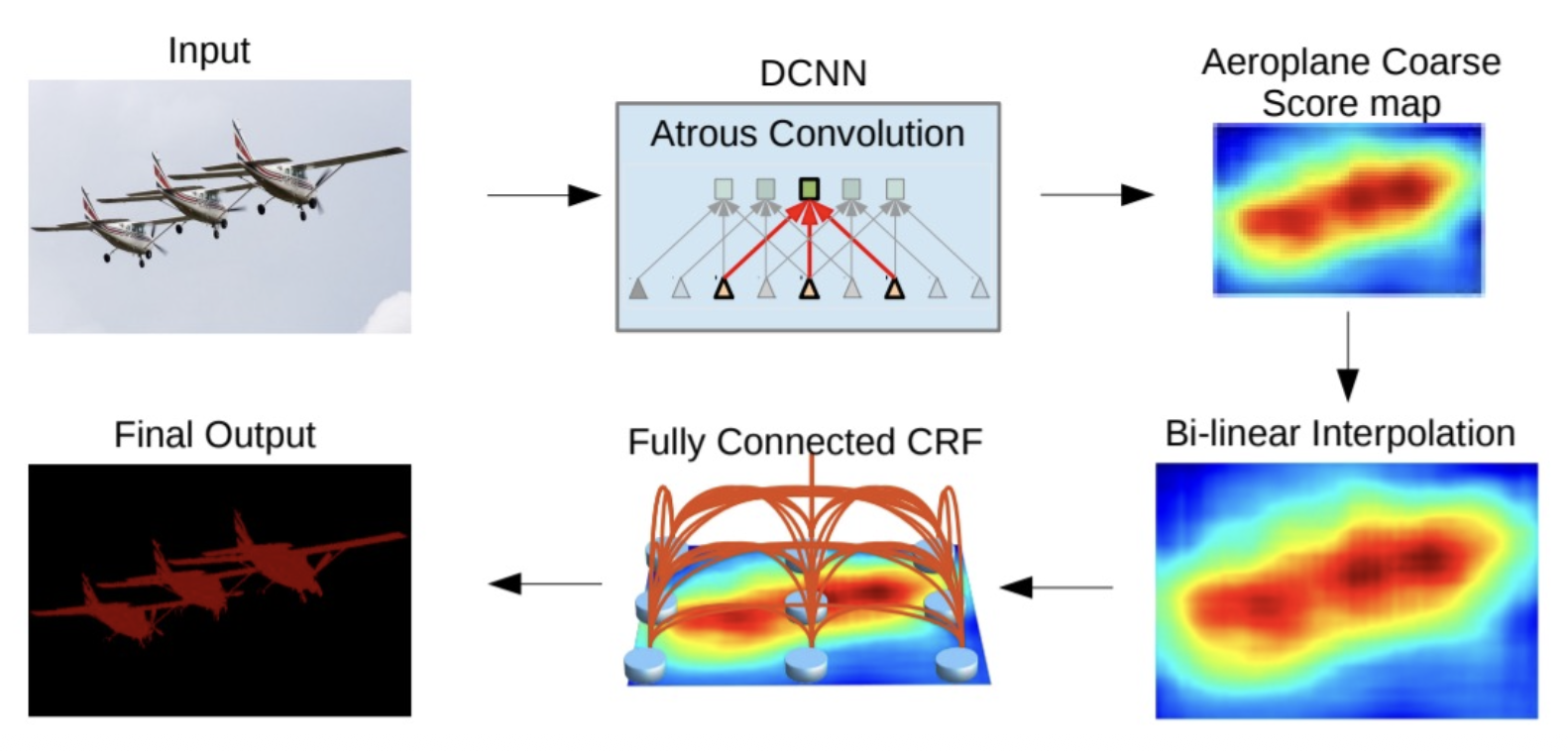
条件随机场:
- 能量函数:\(E(\boldsymbol{x})=\sum_i\theta_i(x_i)+\sum_{ij}\theta_{ij}(x_i,x_j)\)
- 一元势能:\(\theta_i(x_i)=-\log P(x_i)\),其中 \(P(x_i)\) 是网络给出的分数映射
-
成对势能:
\[ \begin{aligned} \theta_{i, j}(x_i, x_j) & = \mu(x_i, x_j) \bigg[w_1 \exp \left(-\dfrac{\|p_i - p_j\|^2}{2\sigma_\alpha^2} - \dfrac{\|I_i - I_j\|^2}{2\sigma_\beta^2}\right) \\ & + w_2 \exp\left(-\dfrac{\|p_i - p_j\|^2}{2 \sigma_\gamma^2}\right)\bigg] \\ & \text{where } \mu(x_i, x_j) = 1 \text{ if } x_i \ne x_j, \text{and zero otherwise} \end{aligned} \]
效果
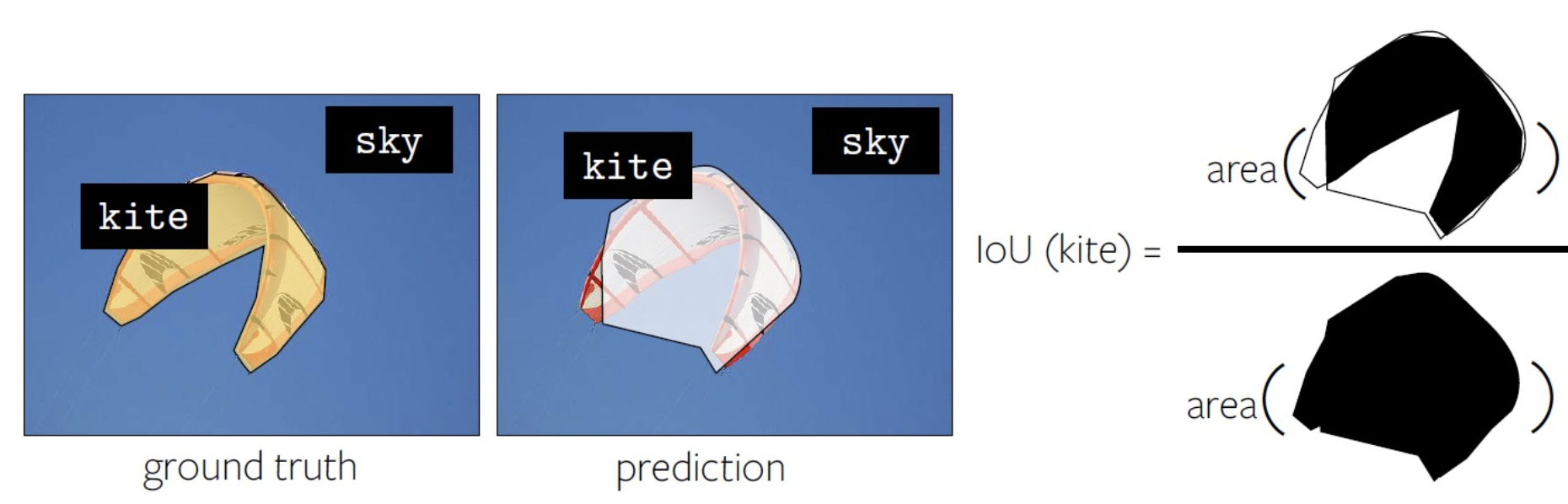
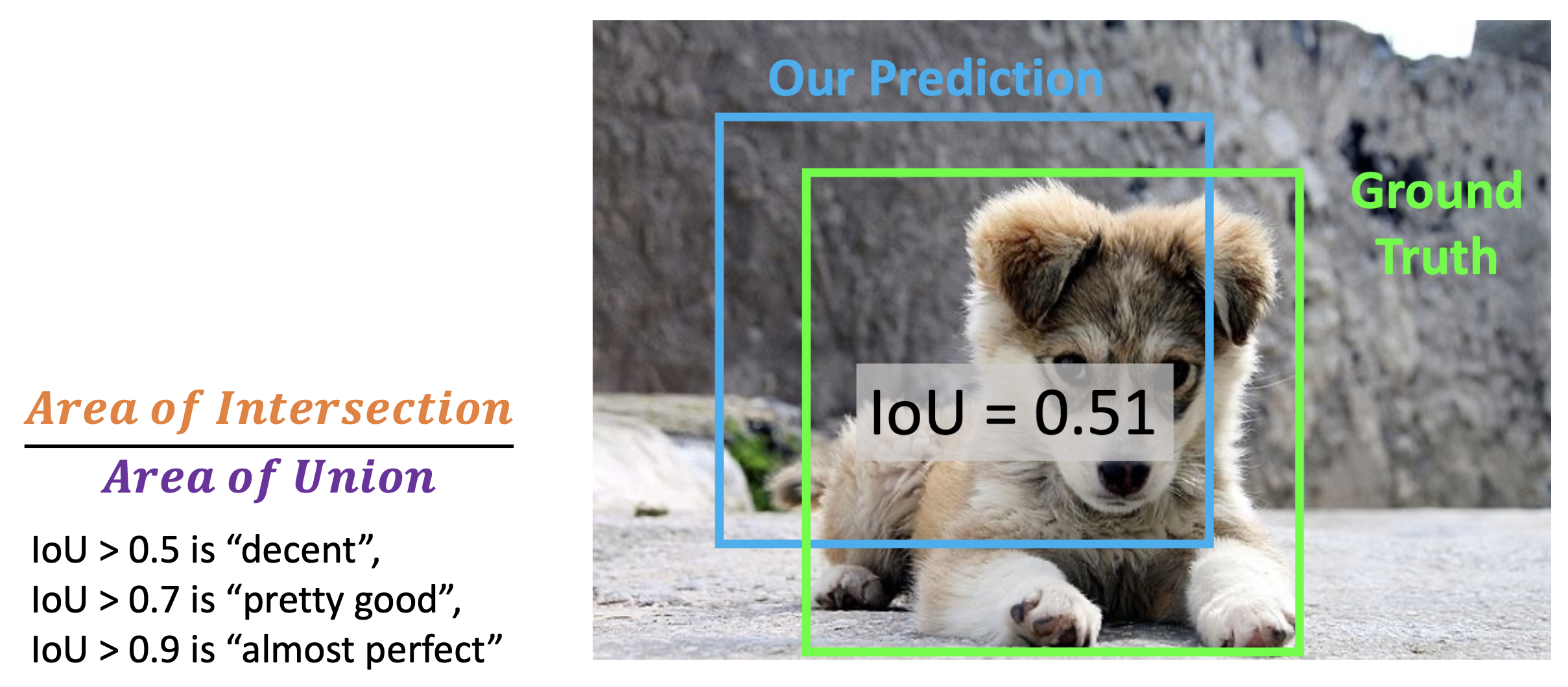
Intersection-over-Union (IoU)⚓︎
语义分割任务的常用评估指标是逐像素交并比(per-pixel intersection-over-union(IoU))
Object Detection⚓︎
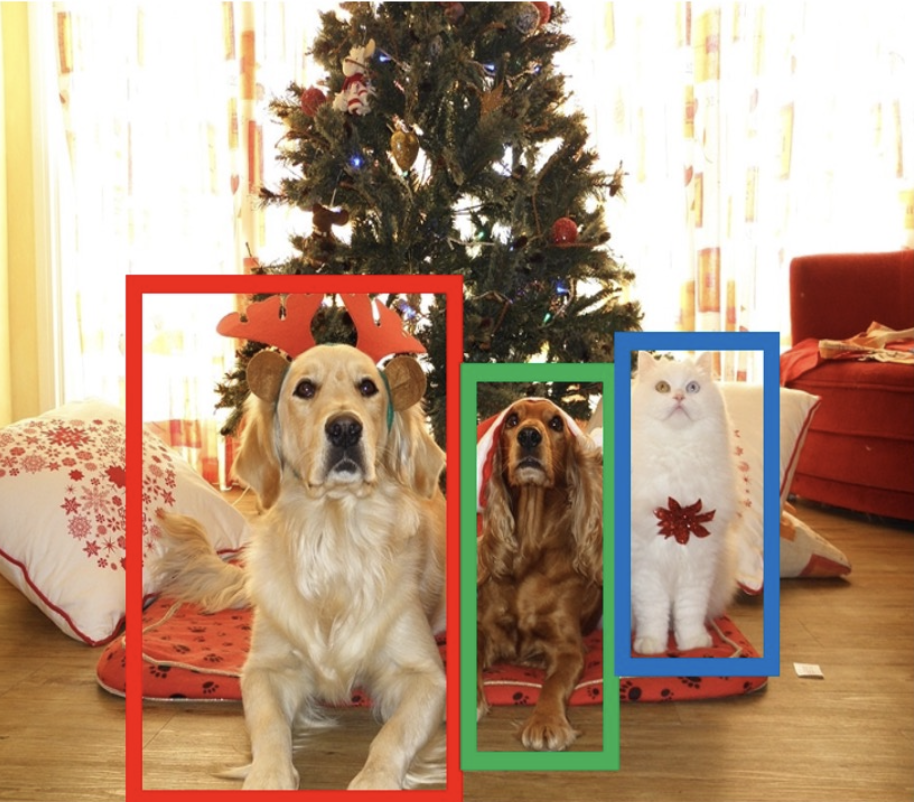
目标检测(object detection):
- 输入:单张 RGB 图像
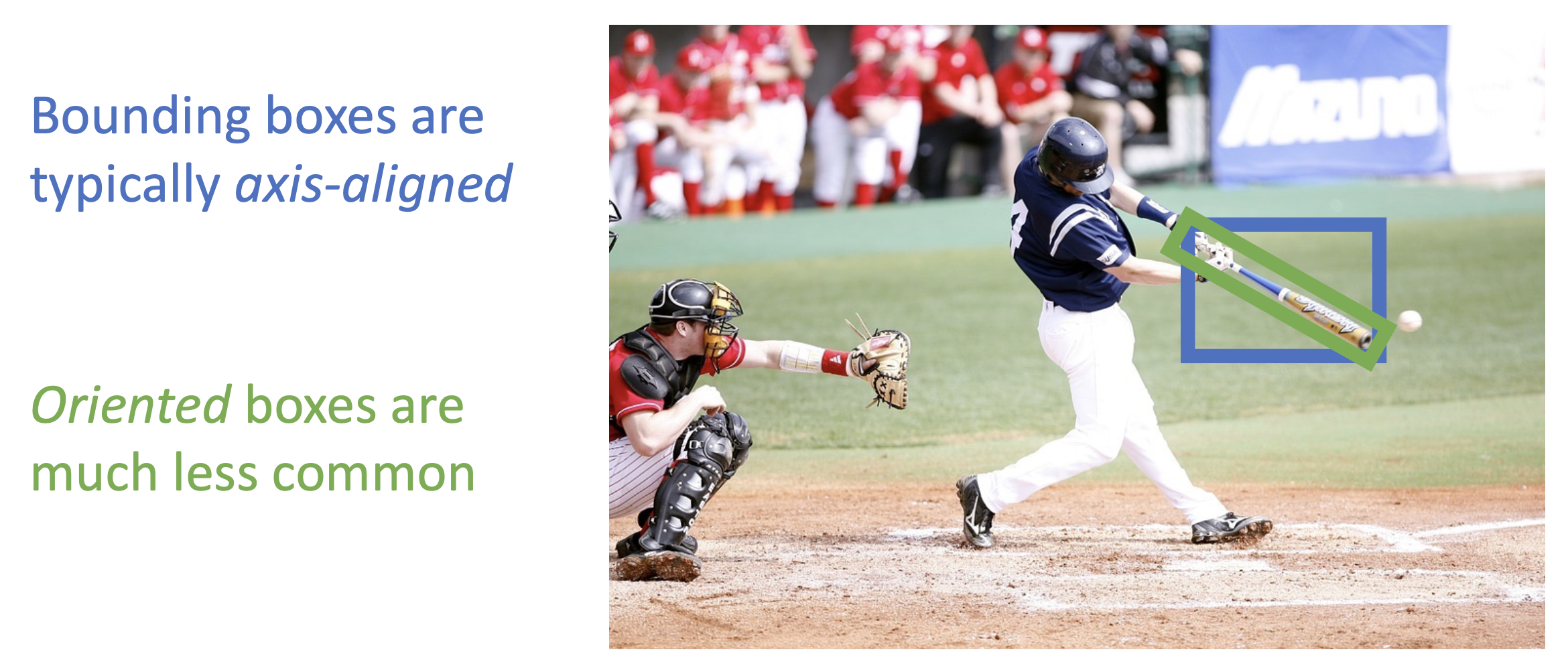
- 输出:一组表示目标的包围盒(bounding box, bbox)
包围盒包含以下信息:
- 类别标签
- 位置(x, y)
- 大小(w, h)
包围盒

同样使用交并比(intersection over union, IoU) 比较预测结果和基准事实的包围盒。
挑战:
- 多个输出:需要每张图像输出可变数量的目标
- 多种类型的输出:需要预测“是什么”(类别标签)以及“在哪里”(包围盒)
- 大图像:分类可以在 224x224 的分辨率下进行,但检测需要更高的分辨率,通常在 800x600 左右
对于单目标的检测,我们可以将其拆分为分类(classification) 和定位(localization) 任务,分别解答“是什么”以及“在哪里 ”的问题:
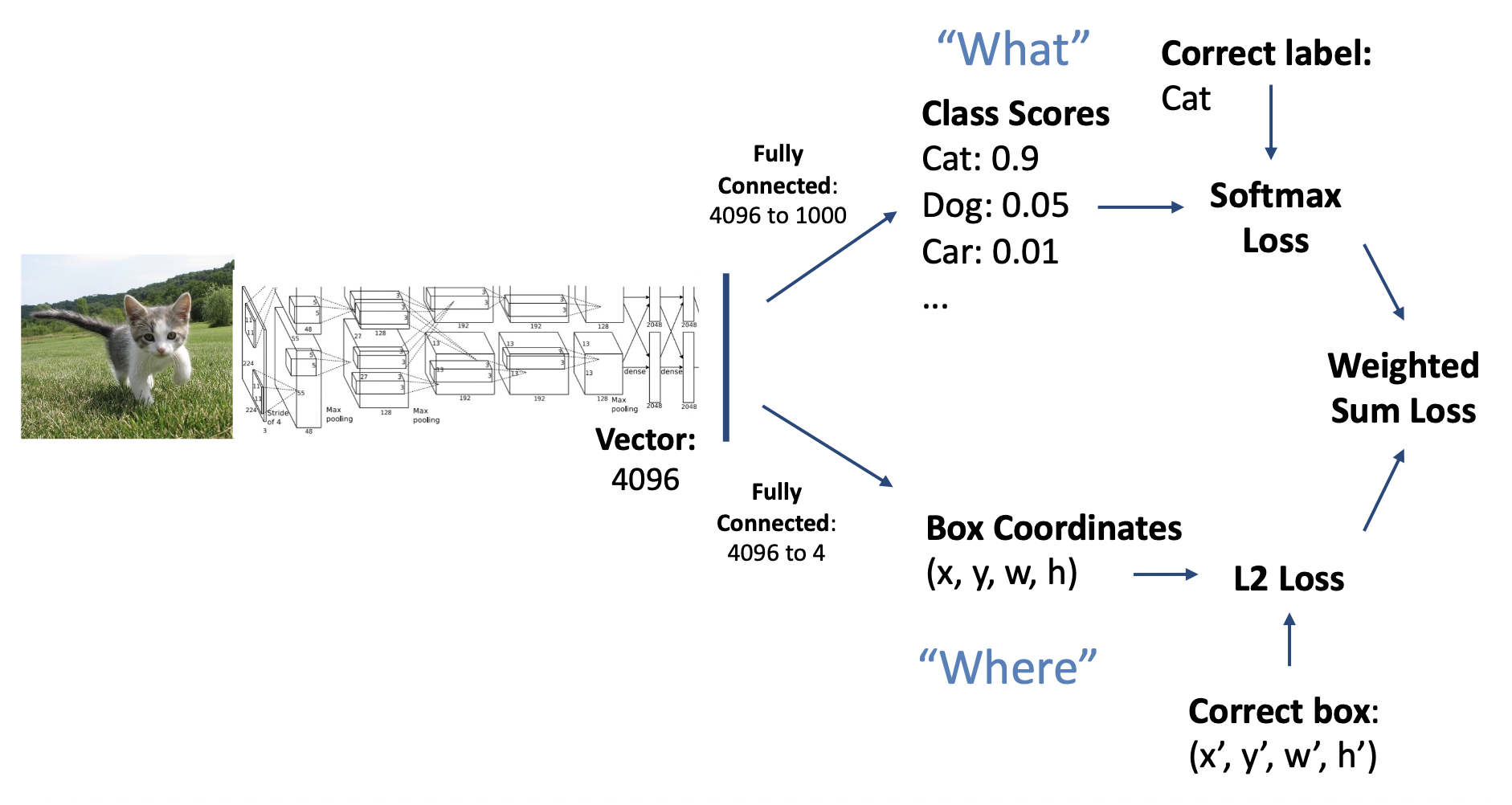
由于定位问题输出的是 4 个实数 (x, y, h, w),因此我们可以将定位视为一种回归(regression) 问题。
然而,我们往往需要做的是单张图像上的多目标检测,仅靠上述方法是无法解决这类更复杂的问题的:
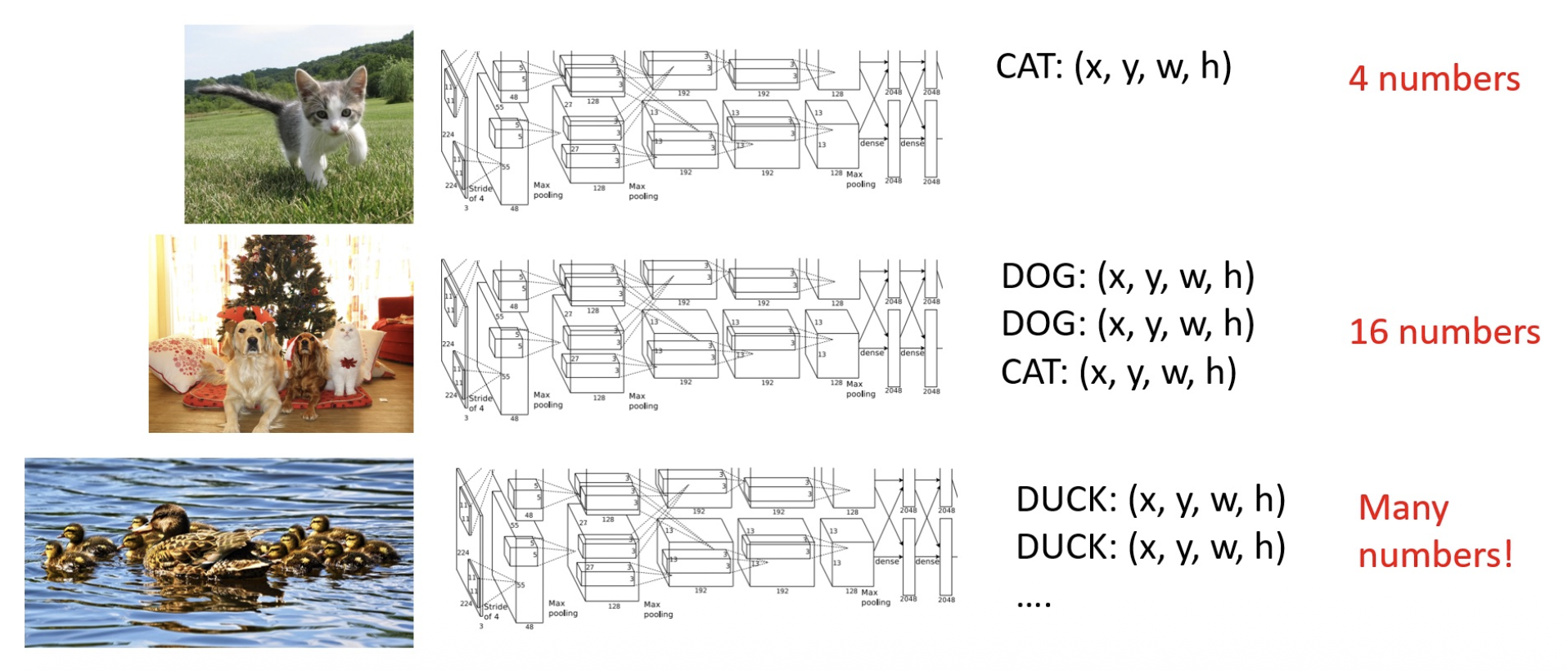
下面介绍一些可能的实现方法。
Sliding Windows⚓︎
滑动窗口:将 CNN 应用于图像的多个不同部分 (crops);CNN 将每个部分分类为目标或背景
例子
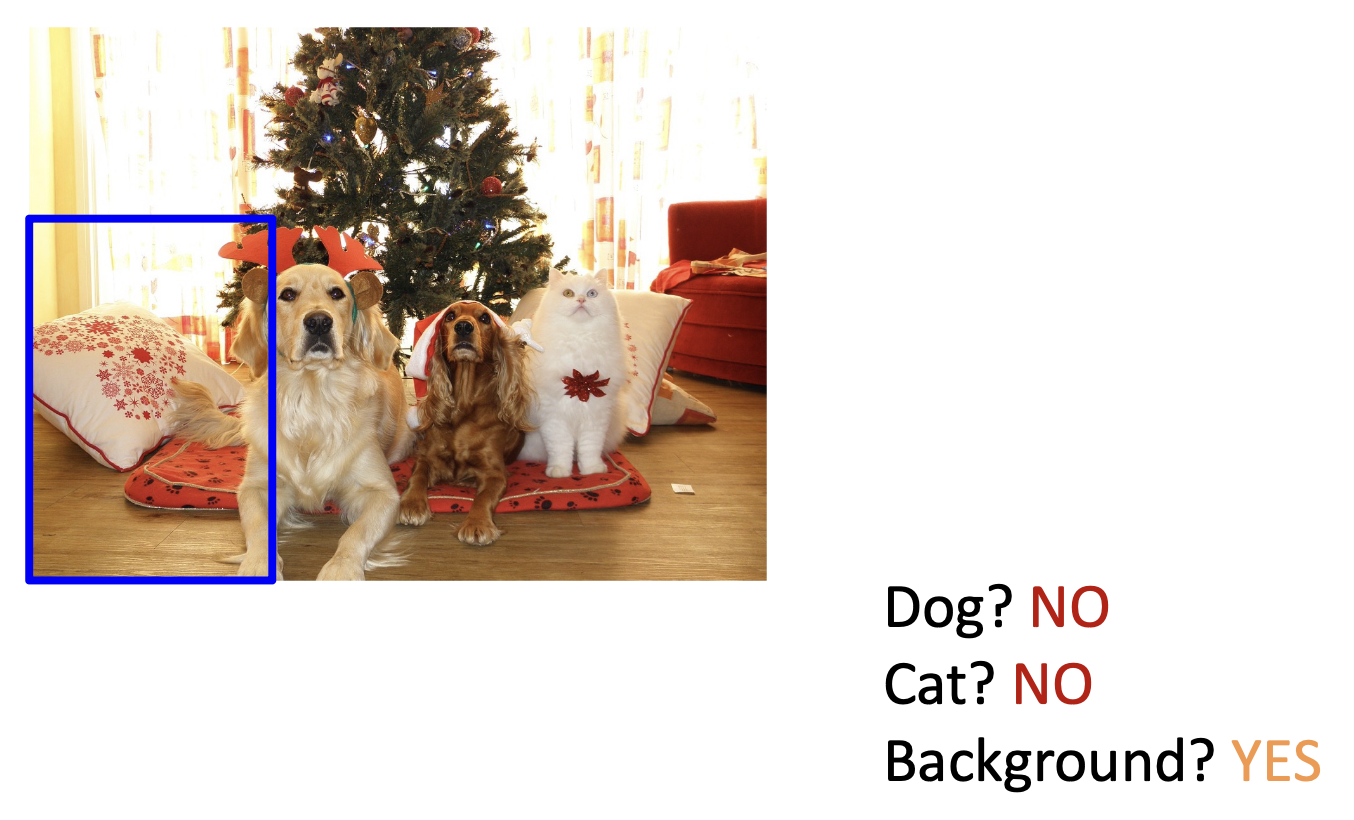
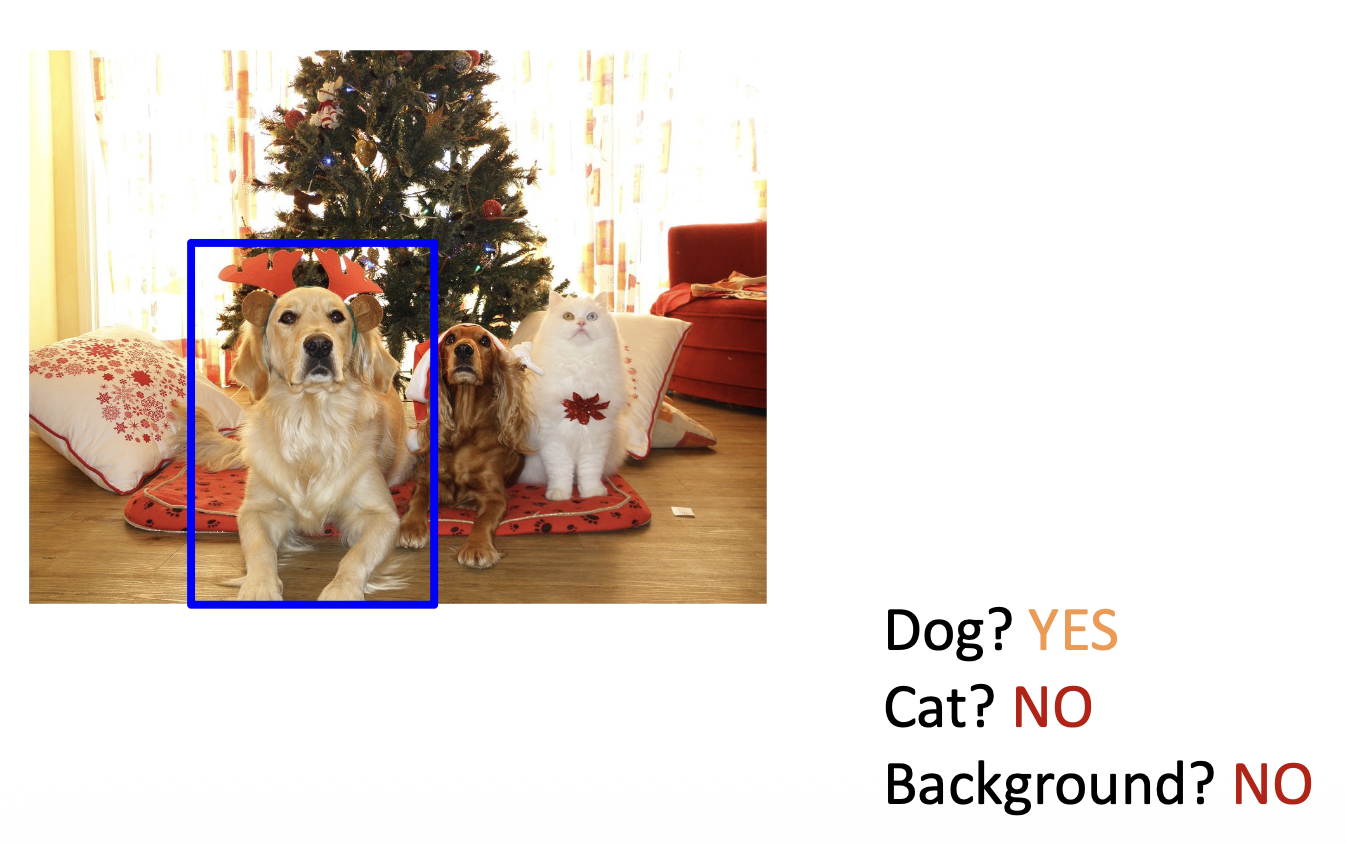
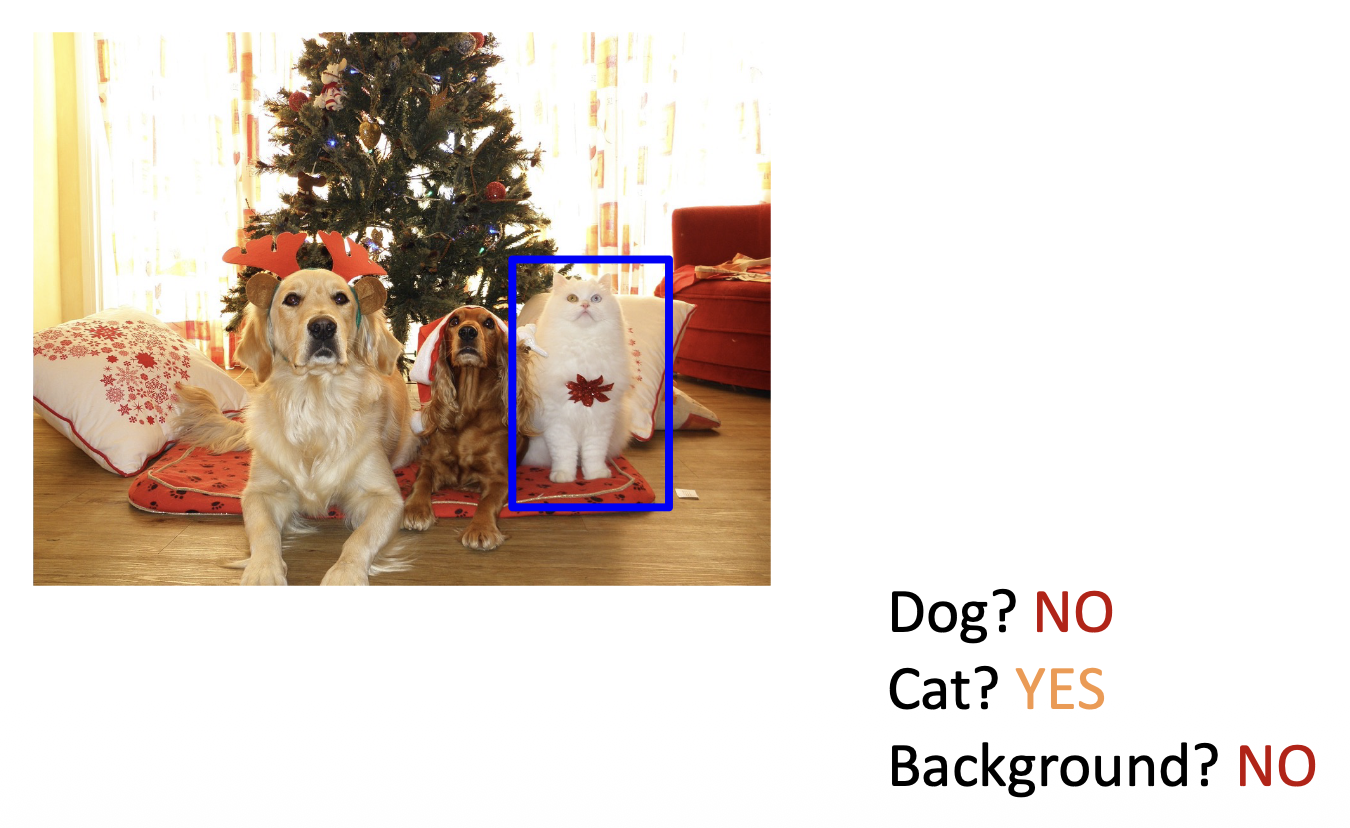
-
问题:需要将 CNN 应用于大量位置、尺度和宽高比,计算成本非常高
- 假如包围盒大小为 h * w
- 可能的 x 位置:W - w + 1
- 可能的 y 位置:H - h + 1
- 可能的位置:(W - w + 1) * (H - h + 1)
- 所以对于一张 800x600 的图像,包围盒大小约为 58MB,成本太高,这样我们就没法评估所有目标了
- 假如包围盒大小为 h * w
Region Proposals⚓︎
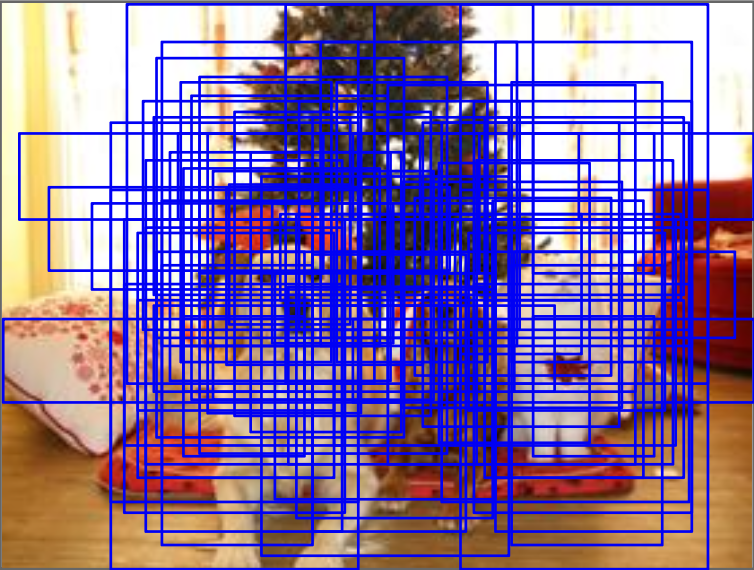
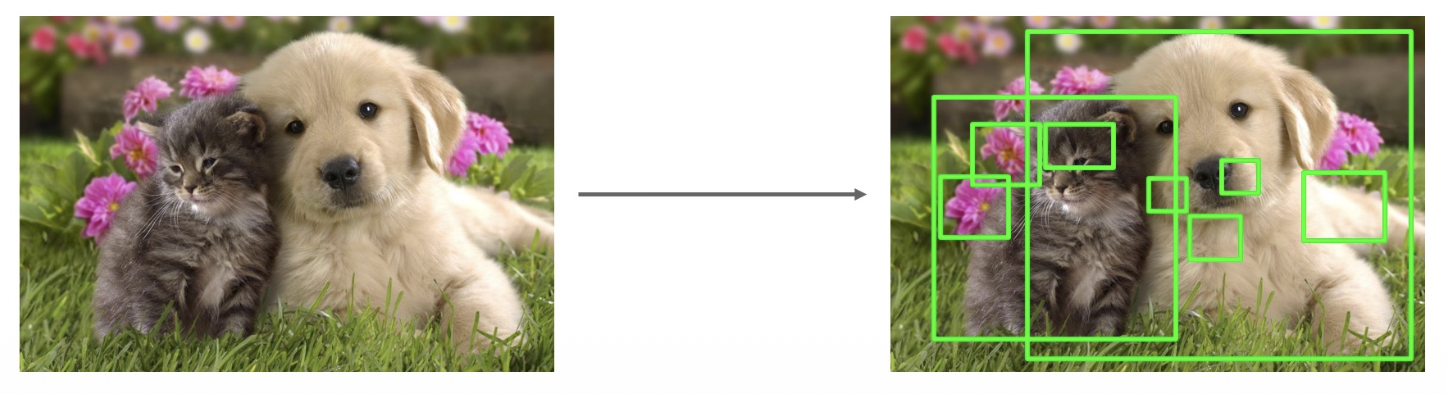
区域建议(region proposal):寻找一组可能包含所有目标的包围盒
- 通常基于启发式的方法 (heuristics),比如超分割(over-segmentation)(根据像素特征(比如颜色)做聚类)
- 运行速度相对更快,比如通过选择性搜索,在 CPU 上花几秒钟就能给出 2000 个区域建议
R-CNN⚓︎
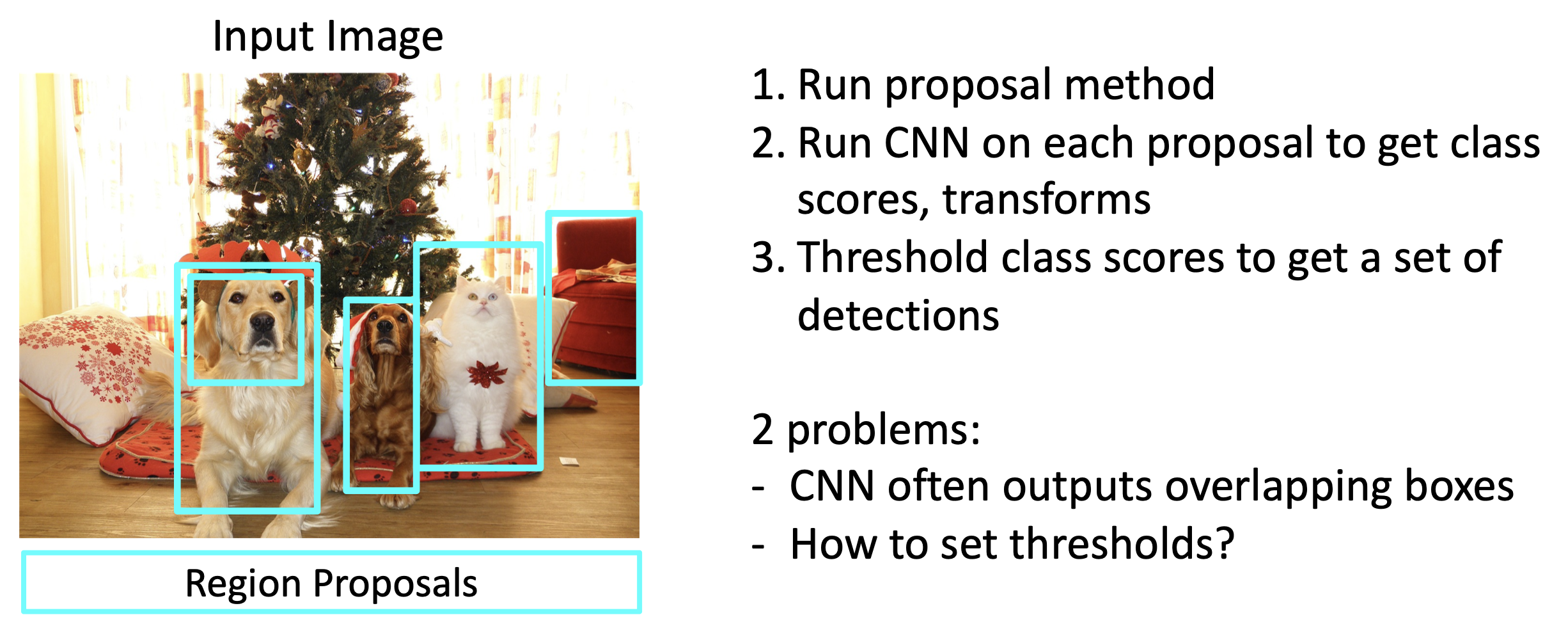
R-CNN(基于区域的 (region-based) CNN)的执行步骤如下:
运行区域建议方法,计算大约 2000 个区域建议(包围盒
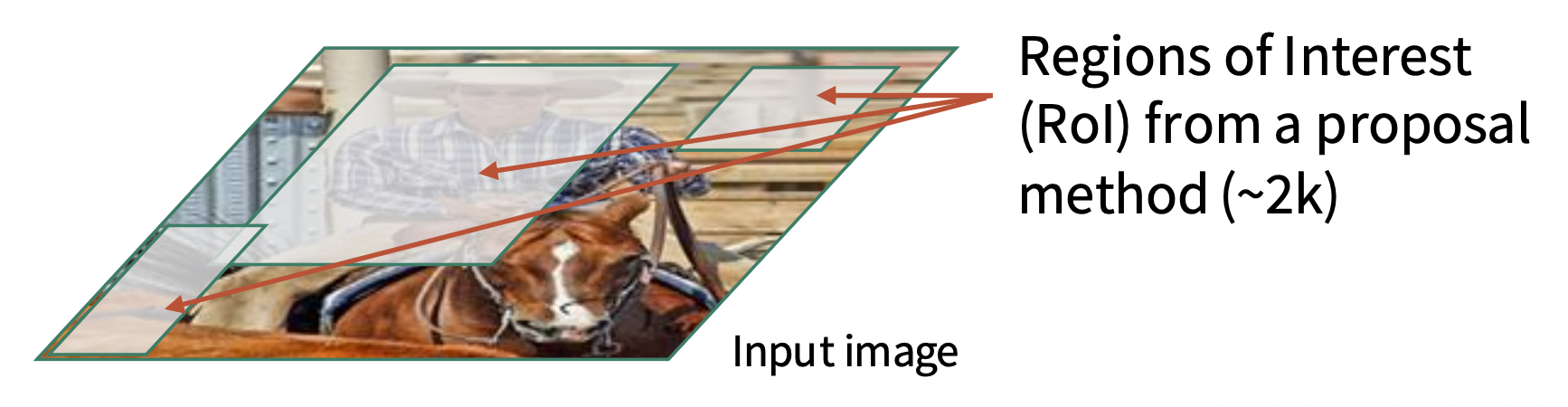
将每个建议的大小调整至 224x224,作为下一步 CNNs 的输入
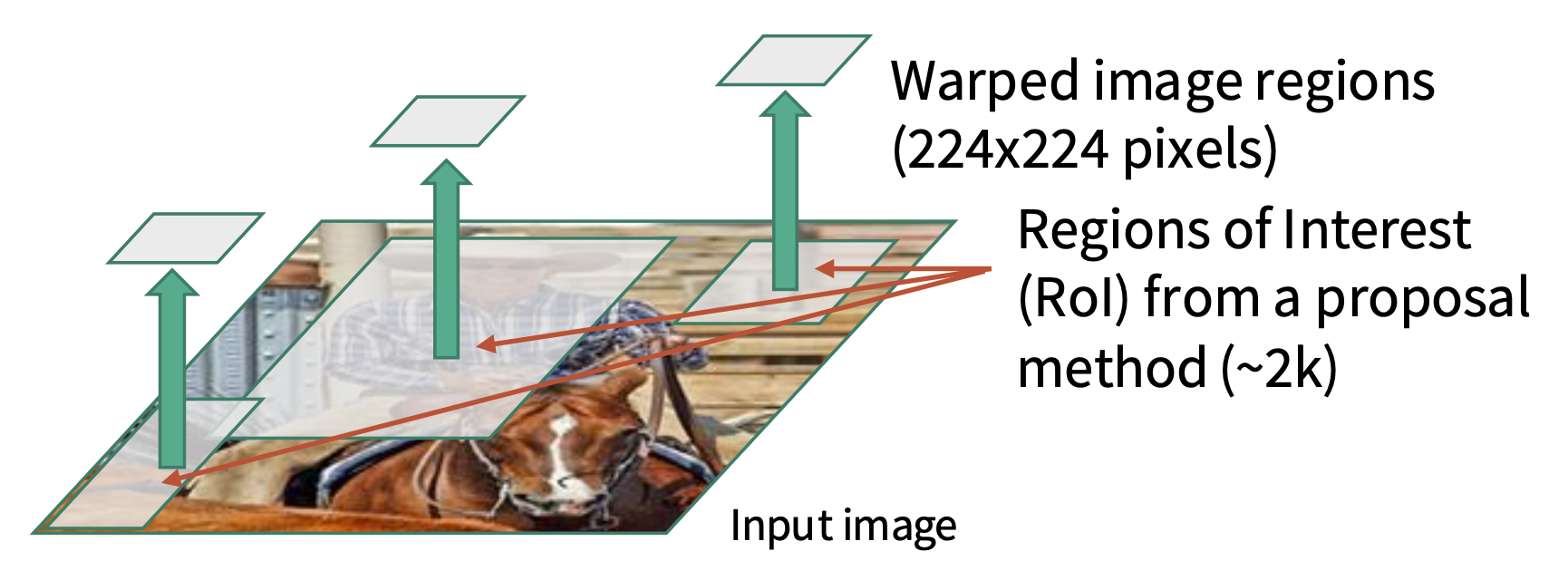
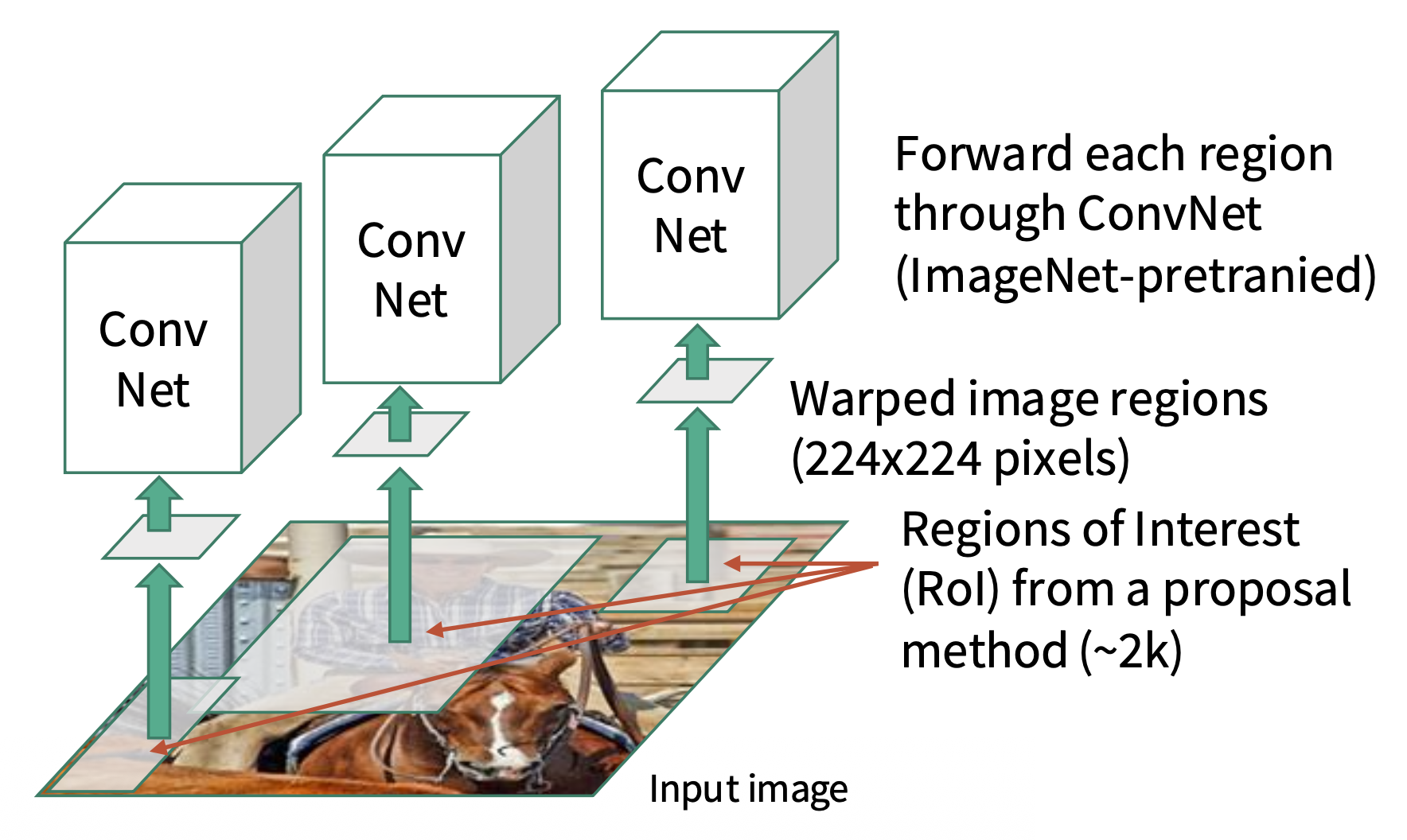
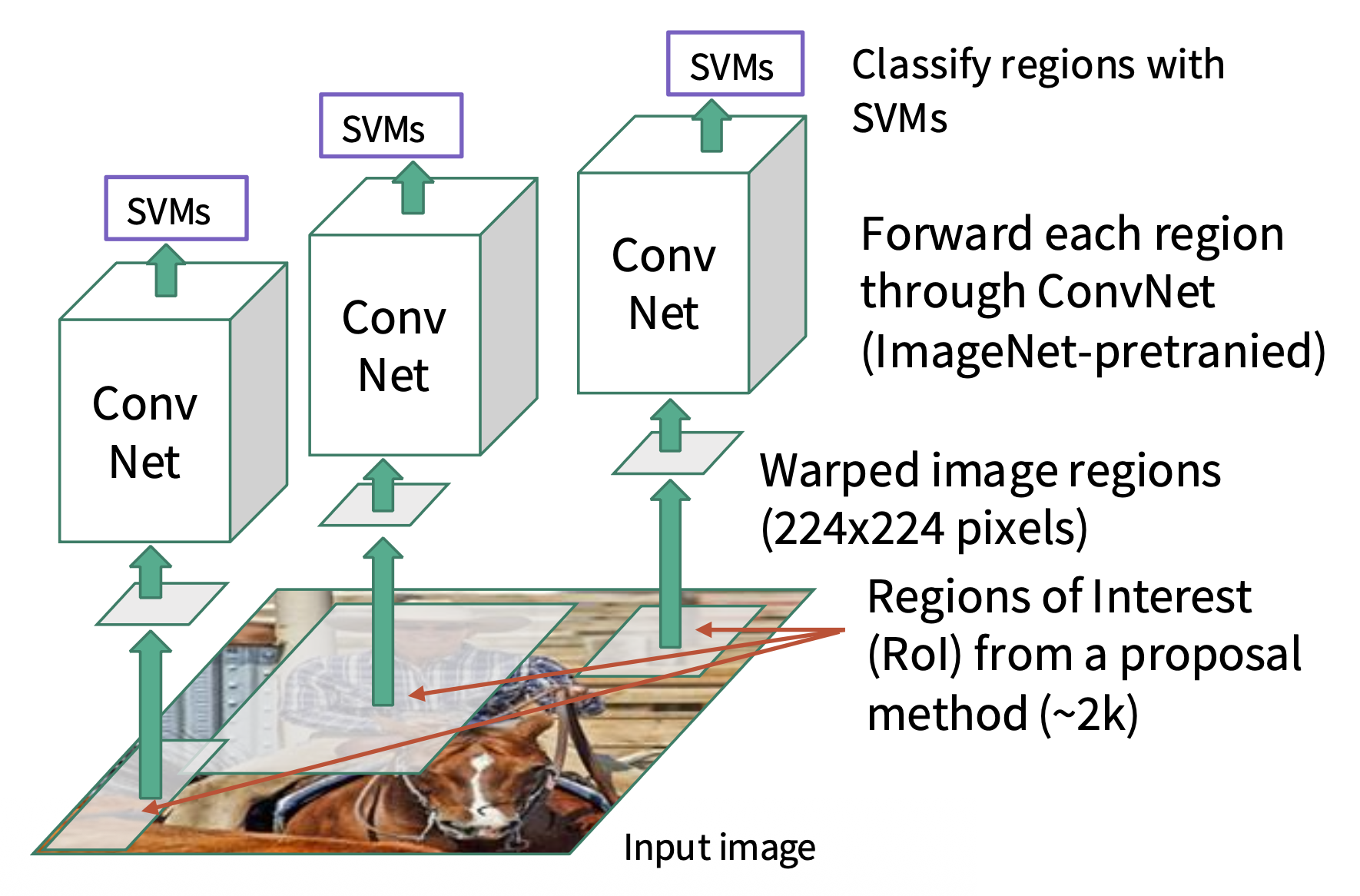
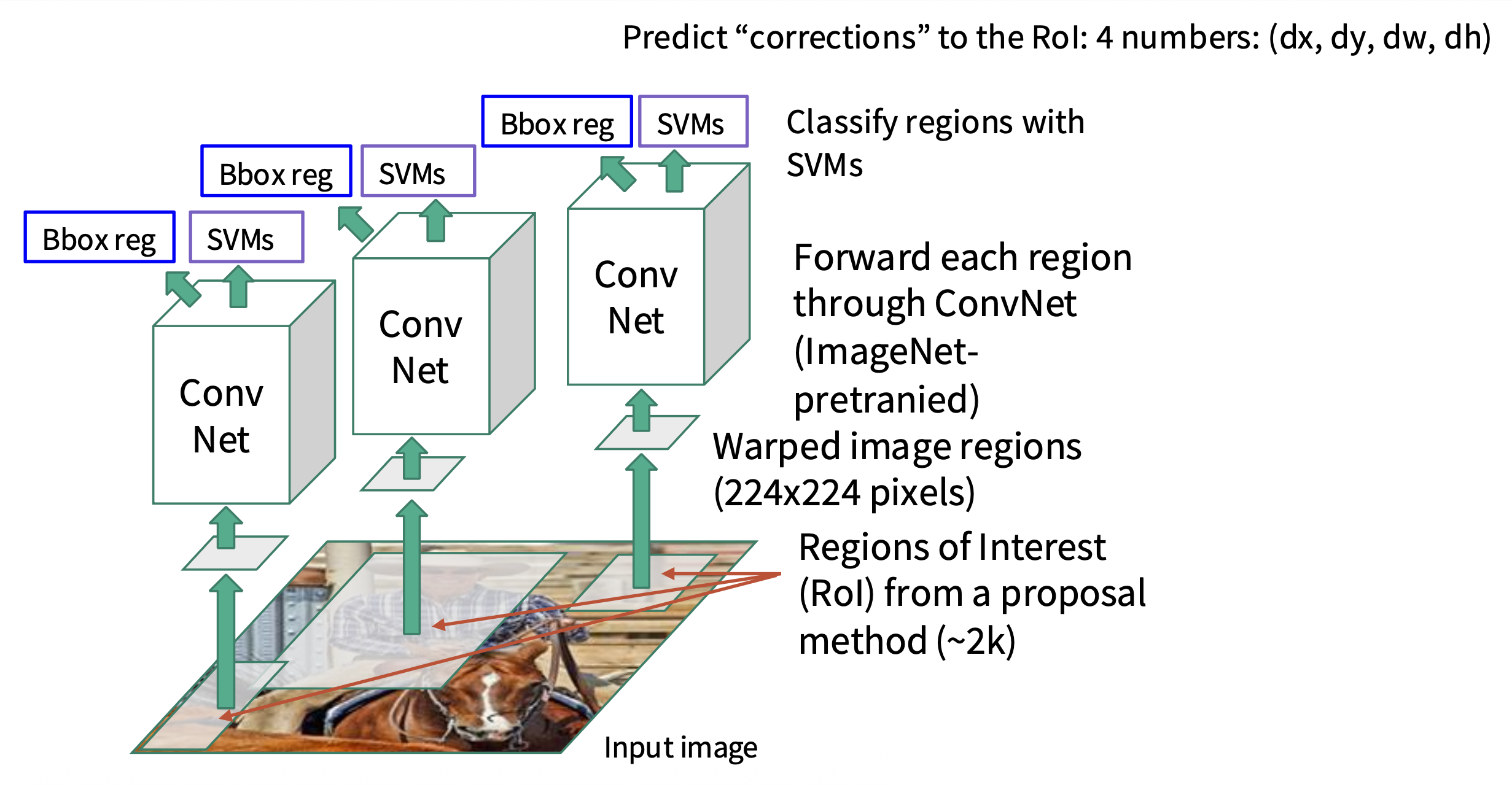
预测每个类的分数 + 包围盒变换,根据分数选择一组区域建议作为输出
- 问题:非常慢,每张图像需要大约 2000 次的独立的前向传递
- 解决思路:在裁剪之前通过 CNN 传递图像,这样传递的就是裁剪了的卷积特征
框回归(box regression)
- 考虑一个区域建议,其中心为 \((p_x, p_y)\),宽为 \(p_w\),高为 \(p_h\)
-
模型预测一个变换 \((t_x, t_y, t_w, t_h)\) 来纠正区域建议
-
输出框的定义为:
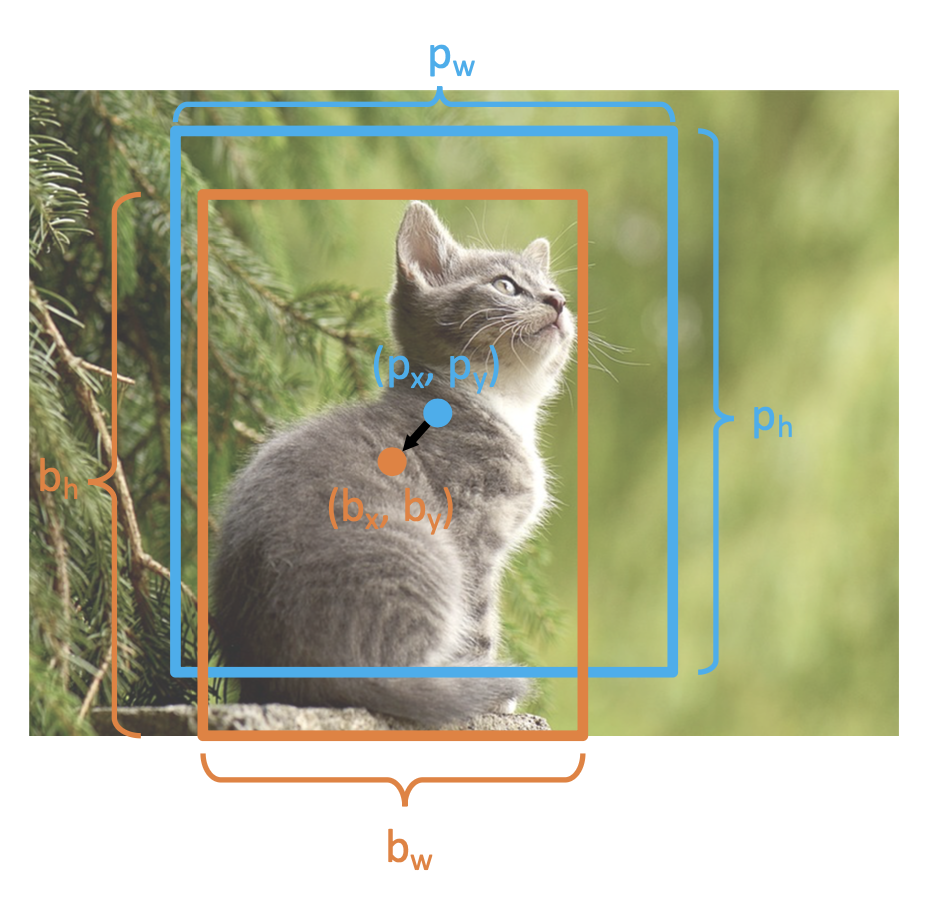
-
根据建议大小相对地移动中心
- \(\textcolor{orange}{b_x} = \textcolor{cornflowerblue}{p_x} + \textcolor{cornflowerblue}{p_w}\textcolor{green}{t_x}\)
- \(\textcolor{orange}{b_y} = \textcolor{cornflowerblue}{p_y} + \textcolor{cornflowerblue}{p_h}\textcolor{green}{t_y}\)
-
尺度建议;\(\exp\) 确保缩放因子 \(> 0\)
- \(\textcolor{orange}{b_w} = \textcolor{cornflowerblue}{p_w} \exp(\textcolor{green}{t_w})\)
- \(\textcolor{orange}{b_h} = \textcolor{cornflowerblue}{p_h} \exp(\textcolor{green}{t_h})\)
-
-
当变换 = 0 时,输出 = 建议
- L2 正则化鼓励不让建议发生改变
- 尺度 / 平移不变性(scale/translation invariance):变换编码了提议和输出之间的相对差异;这很重要,因为卷积神经网络在裁剪后无法看到绝对大小或位置。
- 给定建议和目标输出,我们可以求解网络应输出的变换:
- \(\textcolor{green}{t_x} = (\textcolor{orange}{b_x} - \textcolor{cornflowerblue}{p_x})/\textcolor{cornflowerblue}{p_w}\)
- \(\textcolor{green}{t_y} = (\textcolor{orange}{b_y} - \textcolor{cornflowerblue}{p_y})/\textcolor{cornflowerblue}{p_h}\)
- \(\textcolor{green}{t_w} = \log(\textcolor{orange}{b_w}/\textcolor{cornflowerblue}{p_w})\)
- \(\textcolor{green}{t_h} = \log(\textcolor{orange}{b_h}/\textcolor{cornflowerblue}{p_h})\)
-
训练:
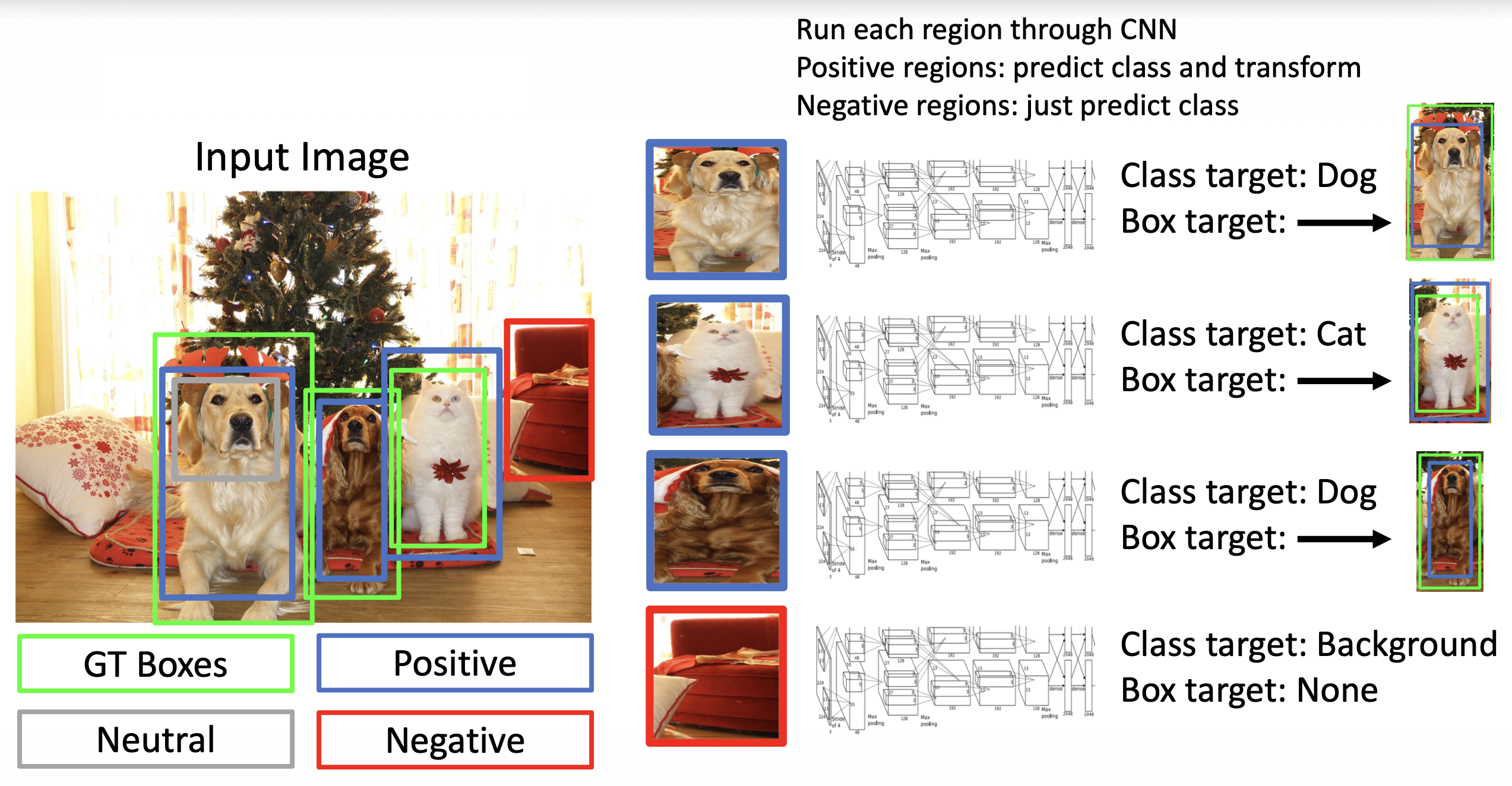
-
测试:
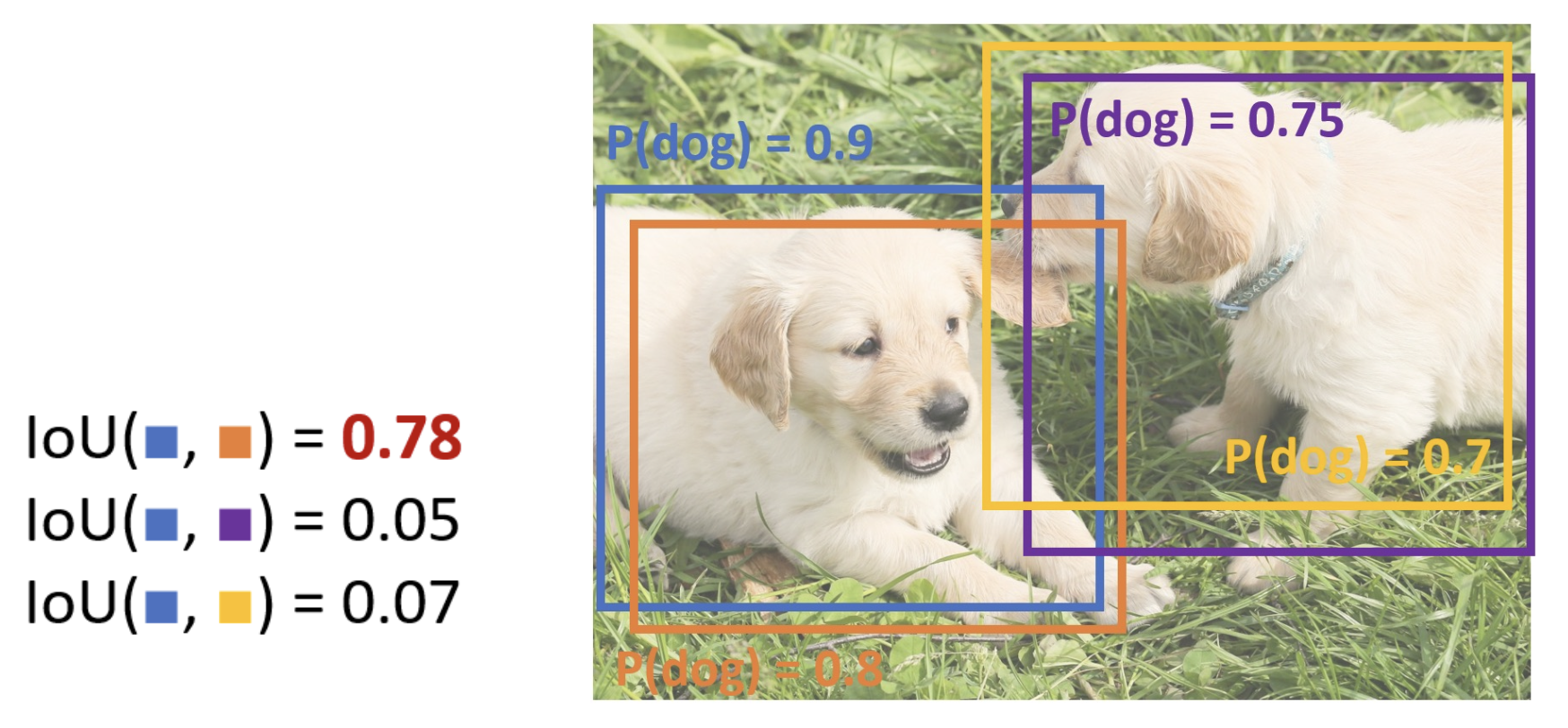
非极大值抑制(non-max suppression, NMS)
- 由于目标检测器通常会对同一个目标输出多个重叠的检测结果(包围盒
) ,但实际上我们只需要其中一个就行了,即预测分数最大的那个 - NMS 执行步骤:
- 选择分数最高的包围盒
- 使用 IoU > 阈值来去除最低分数的包围盒
- 如果还有剩余的包围盒,回到第 1 步
例子
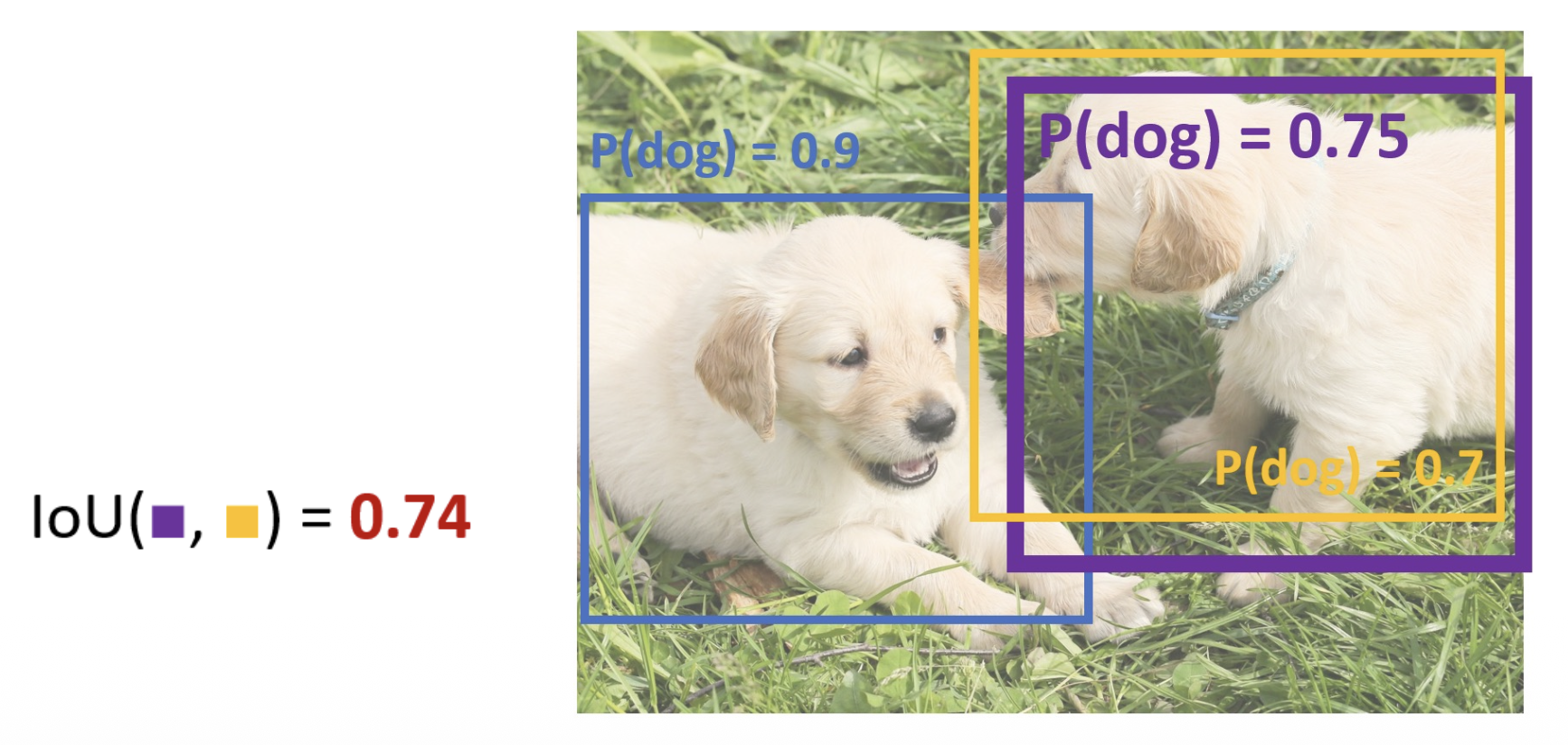
问题:NMS 可能在目标高度重叠时消除“好”的框(目前没有好的解决方案)
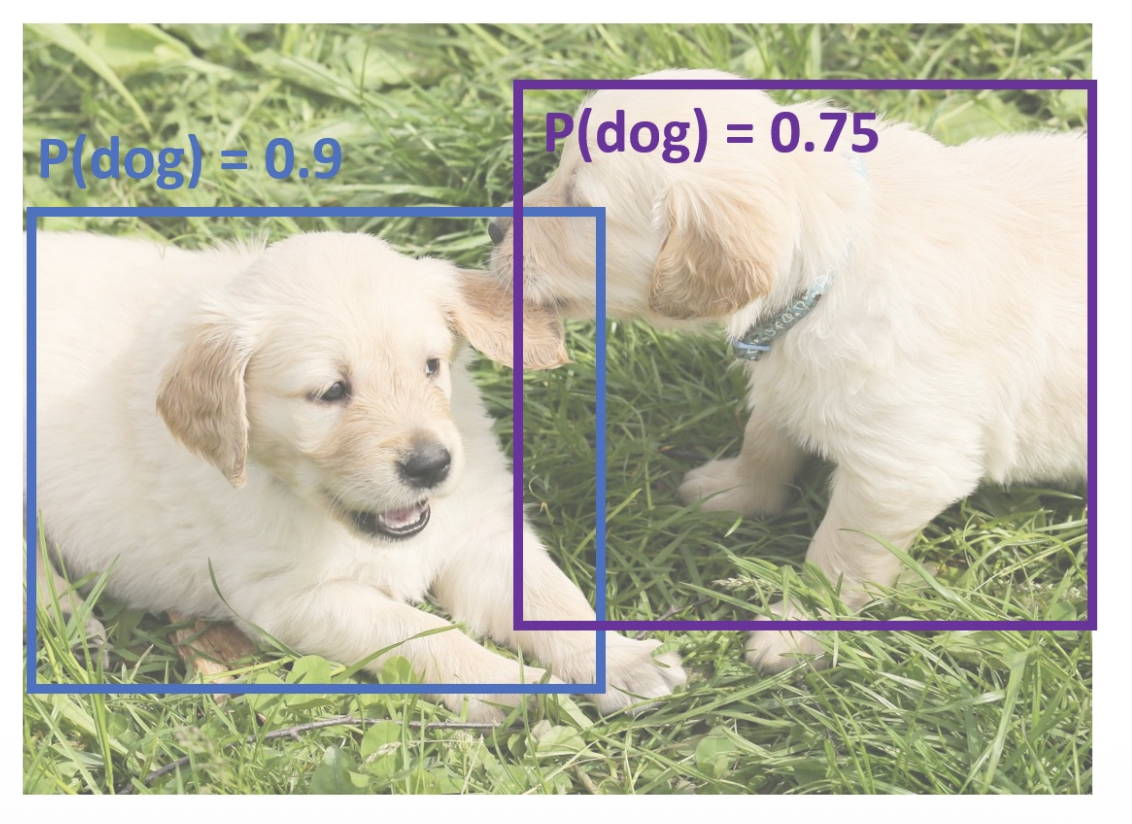
评估目标检测器:平均精度均值 (mean average precision, mAP)
-
在所有测试图像上运行目标检测器(带 NMS)
-
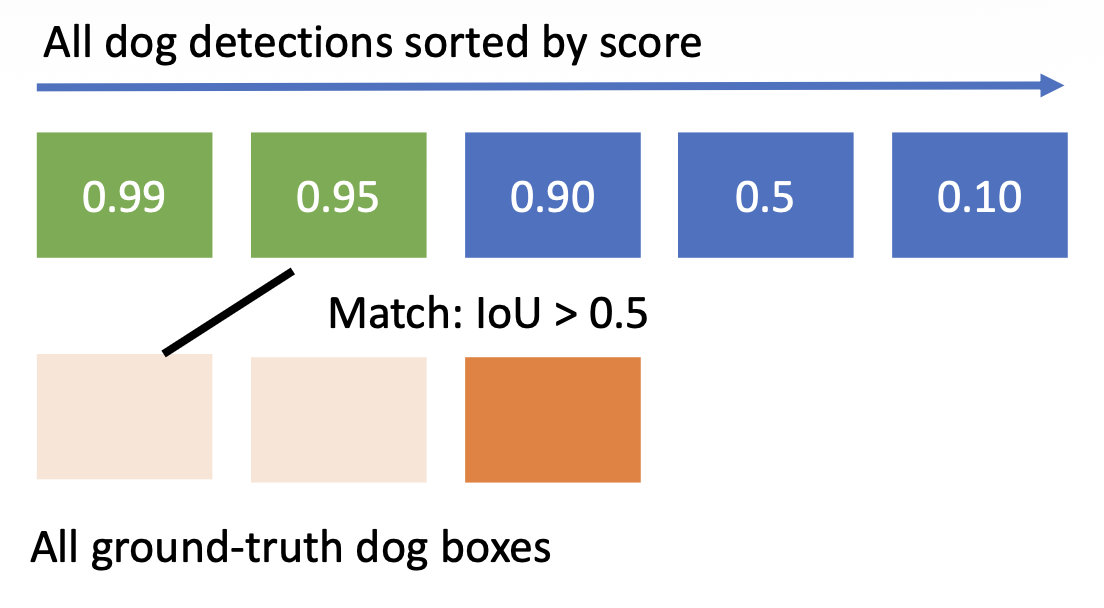
对于每个类别,计算平均精度(AP)= 精确度与召回率曲线下的面积
-
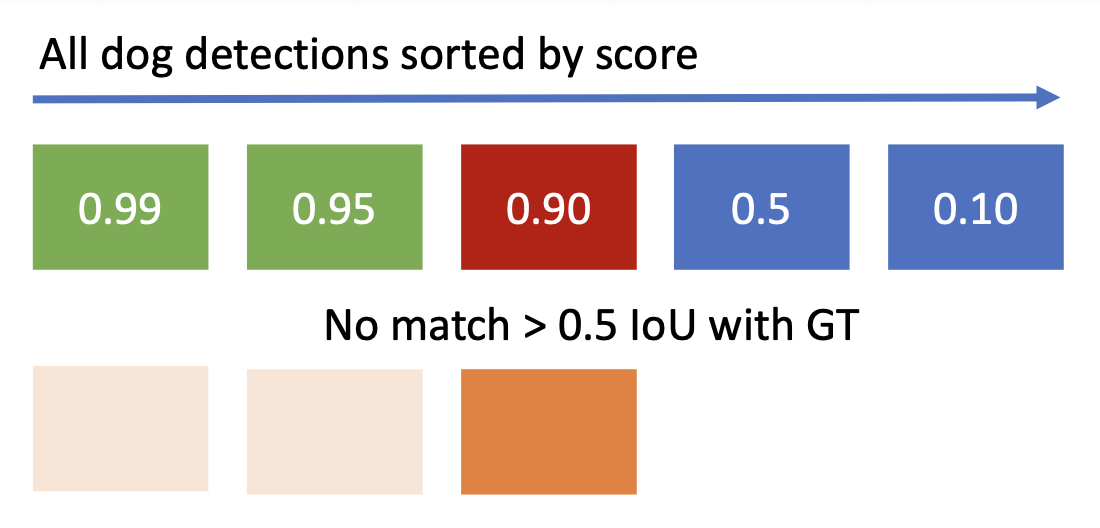
- 如果它与某些 GT 框匹配且 loU > 0.5,将其标记为正例并消除 GT
- 否则将其标记为负例
- 在 PR 曲线上绘制一个点
对于每个检测(从最高分数到最低分数)
-
平均精度(AP)= PR 曲线下的面积
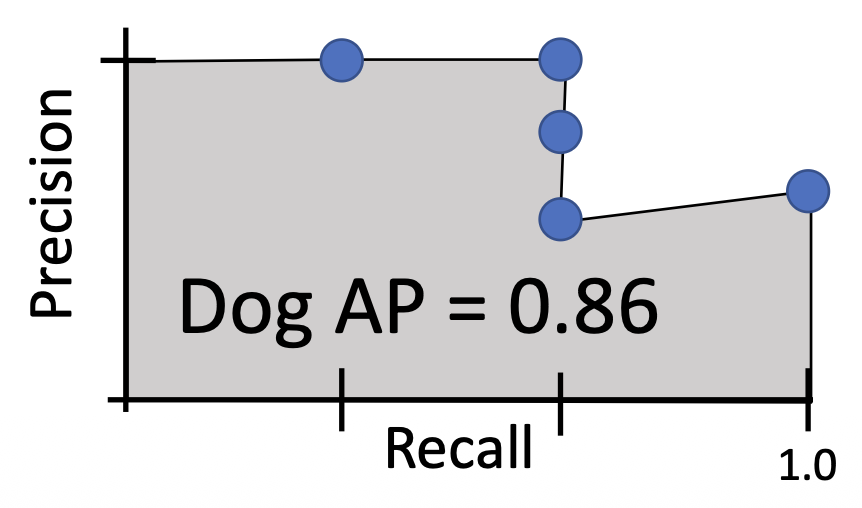
-
-
均值平均精度(mAP)= 每个类别的 AP 平均值
- 对于 COCO mAP:计算每个 loU 的 mAP @thresh 阈值 (0.5,0.55,0.6,...,0.95) 并取平均值
Fast R-CNN⚓︎
快速 R-CNN:
- 先让整张图像过一个大的 ConvNet,得到特征图
- 然后在特征图上取多个区域建议,这些建议经裁剪和缩放(Rol 池化)后会分别经过一个小的 ConvNet
- 之后的过程和原来的 R-CNN 类似
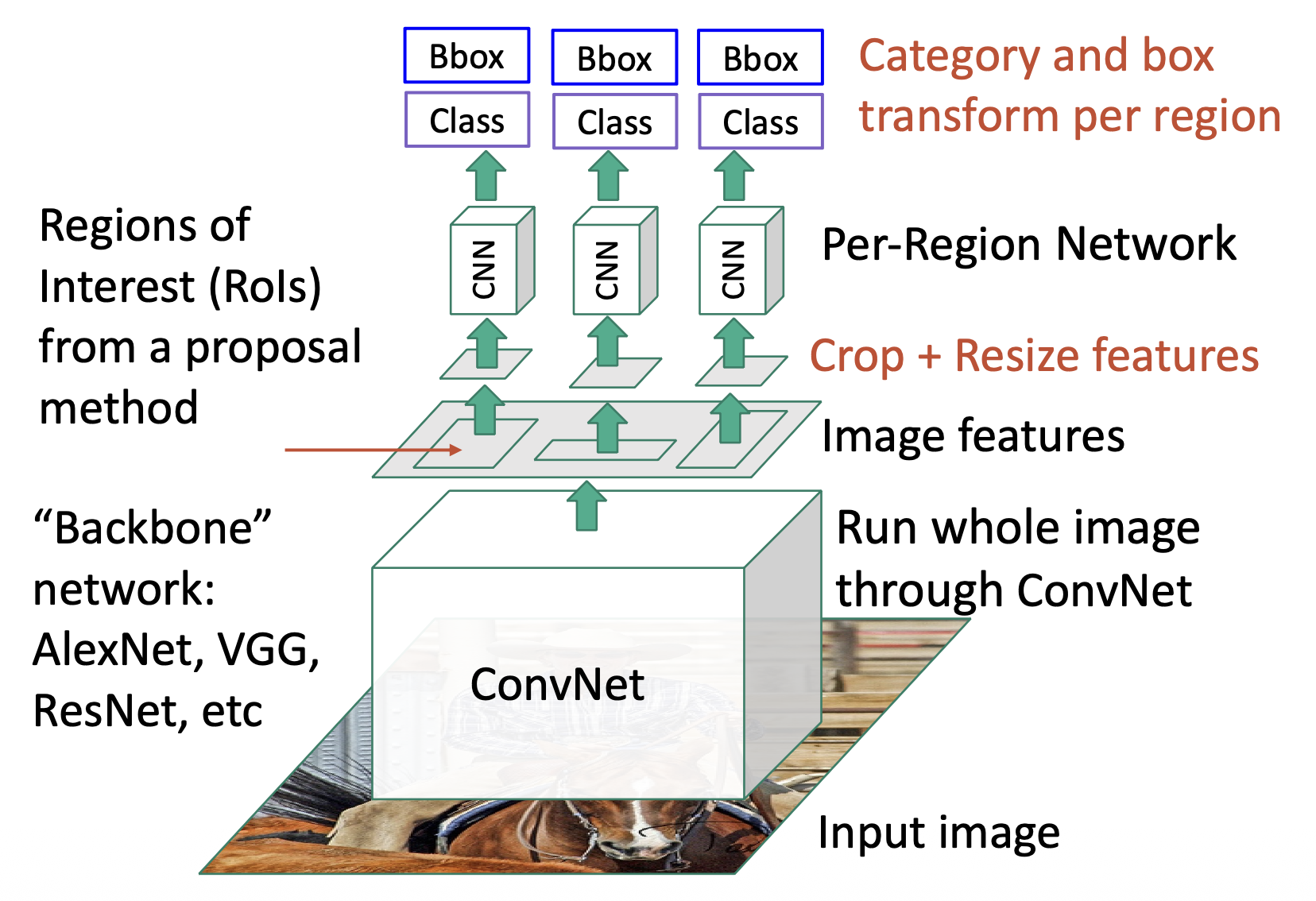
该方法将原来 R-CNN 各 ConvNet 的特征提取部分提取出来,所有图像共享这一个网络,从而减少计算量。这个大的 ConvNet 被称为骨干网络(backbone network)。
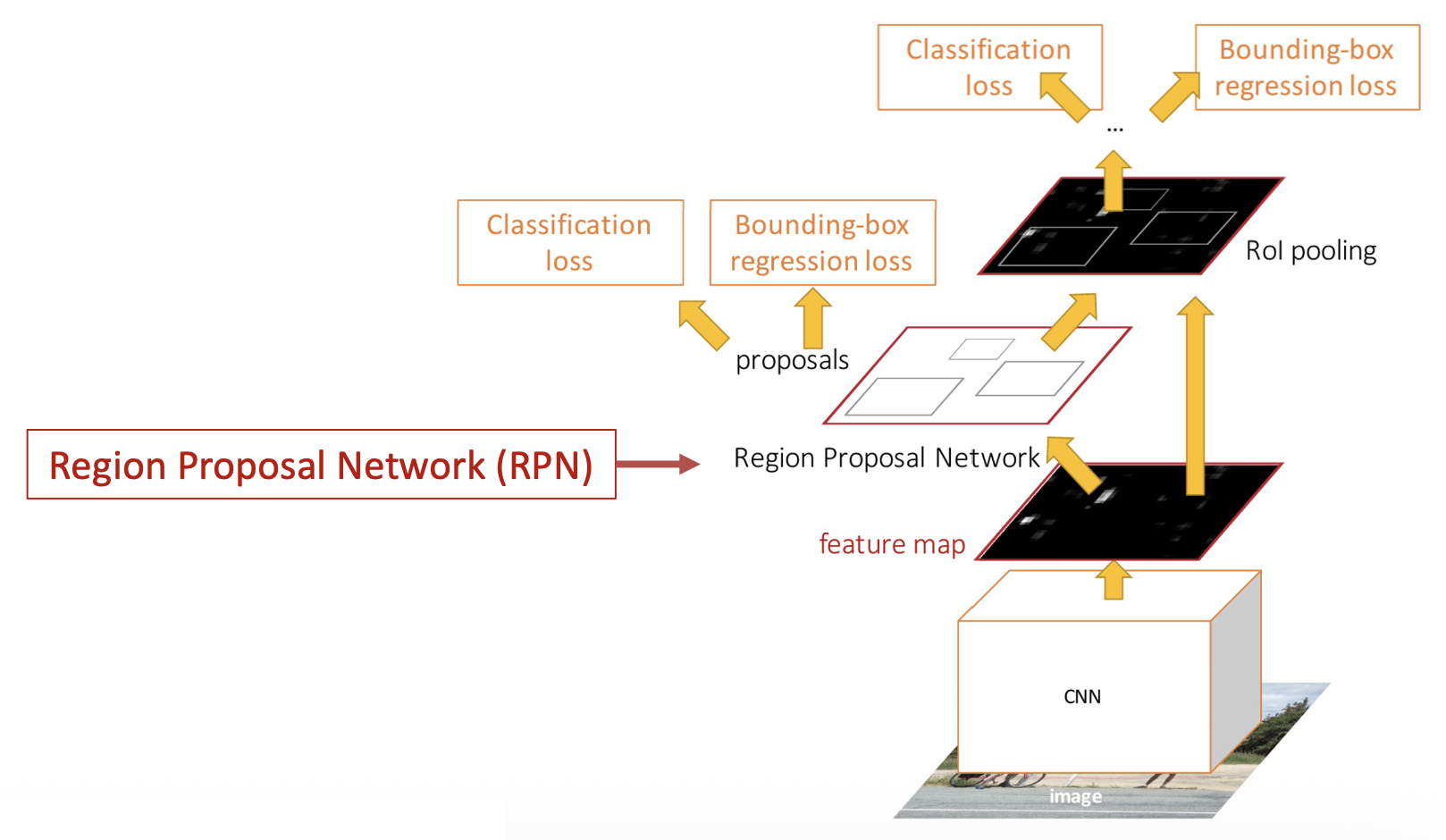
Faster R-CNN⚓︎
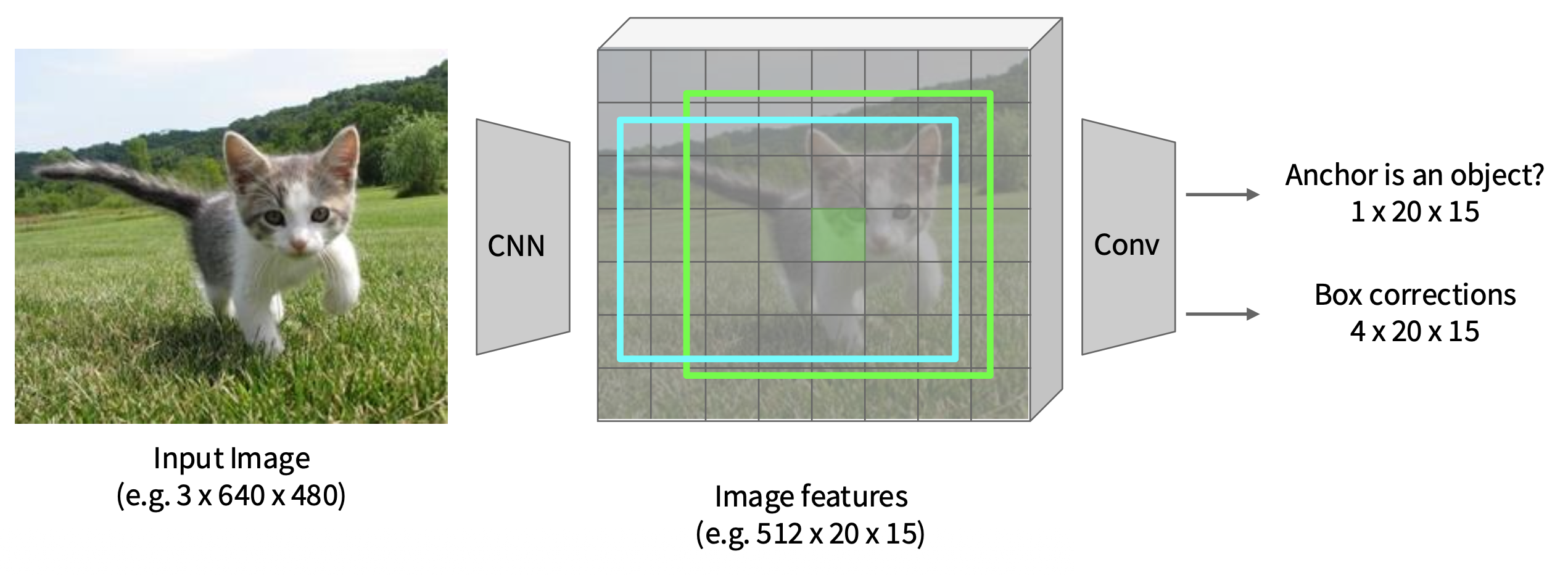
更快的 R-CNN的不同之处在它会使用 CNN 选择建议,提高建议的准确性,从而进一步减少建议的数量。这个用于选择建议的网络被称为区域建议网络(region proposal network, RPN)。
-
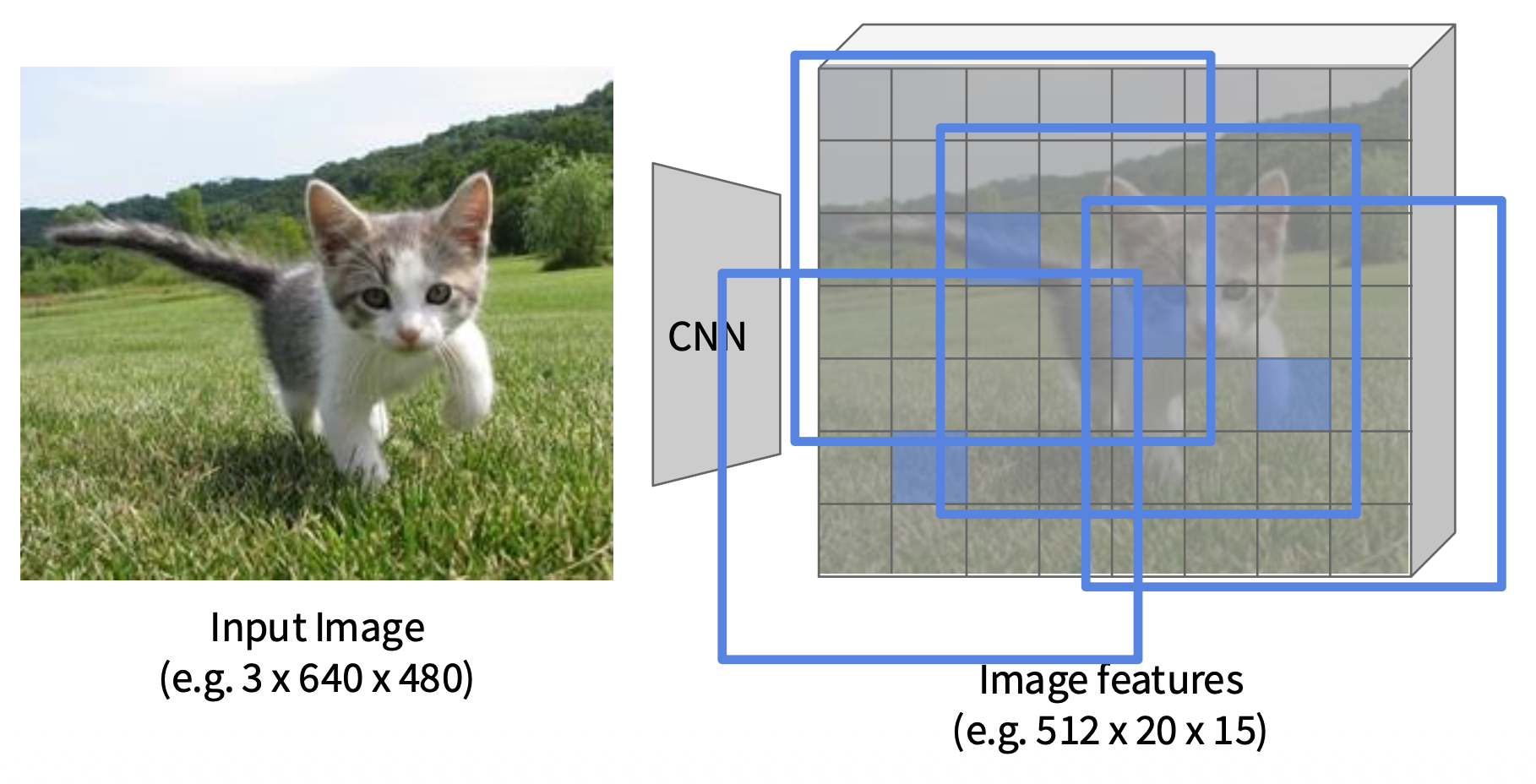
在特征图的每个点上都有一个固定大小的锚框(anchor box)
-
在每一个点上预测相应的锚框是否包含一个目标(二元分类)
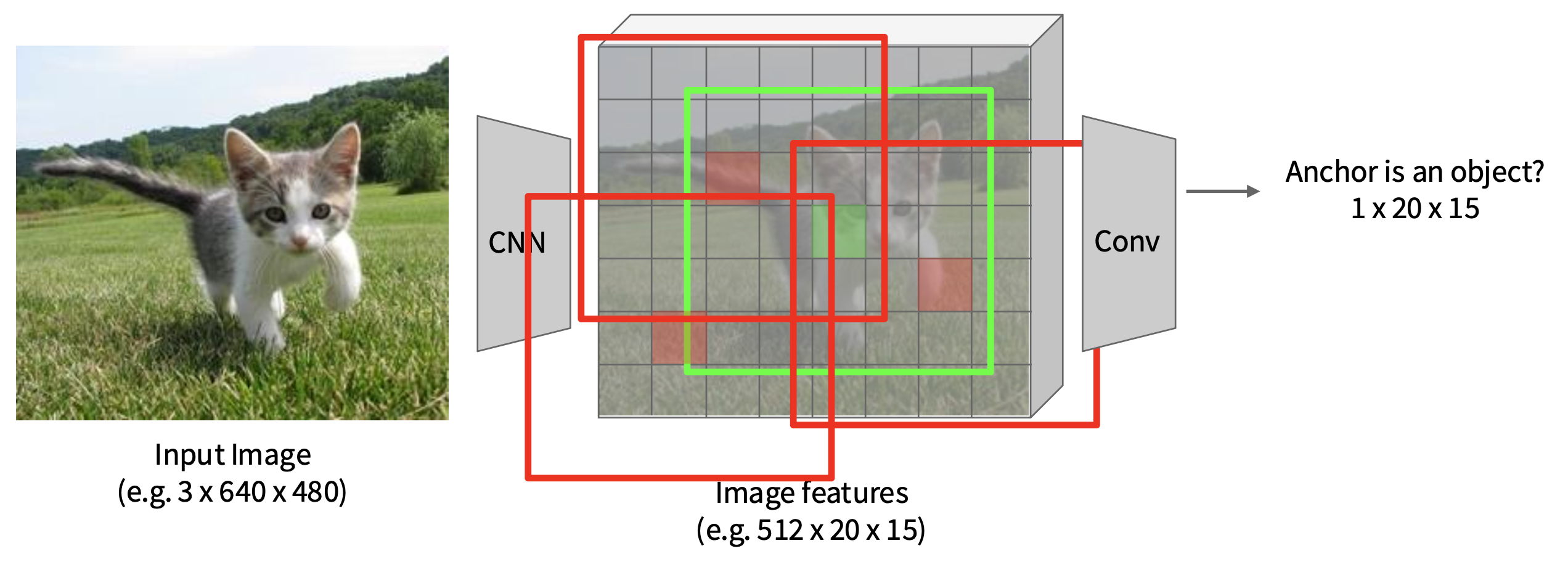
-
对于每个正框,还要预测从锚框到基准事实框的修正(每个像素回归 4 个数字)
-
在实际应用中,每个点使用 K 个不同大小 / 比例的锚框
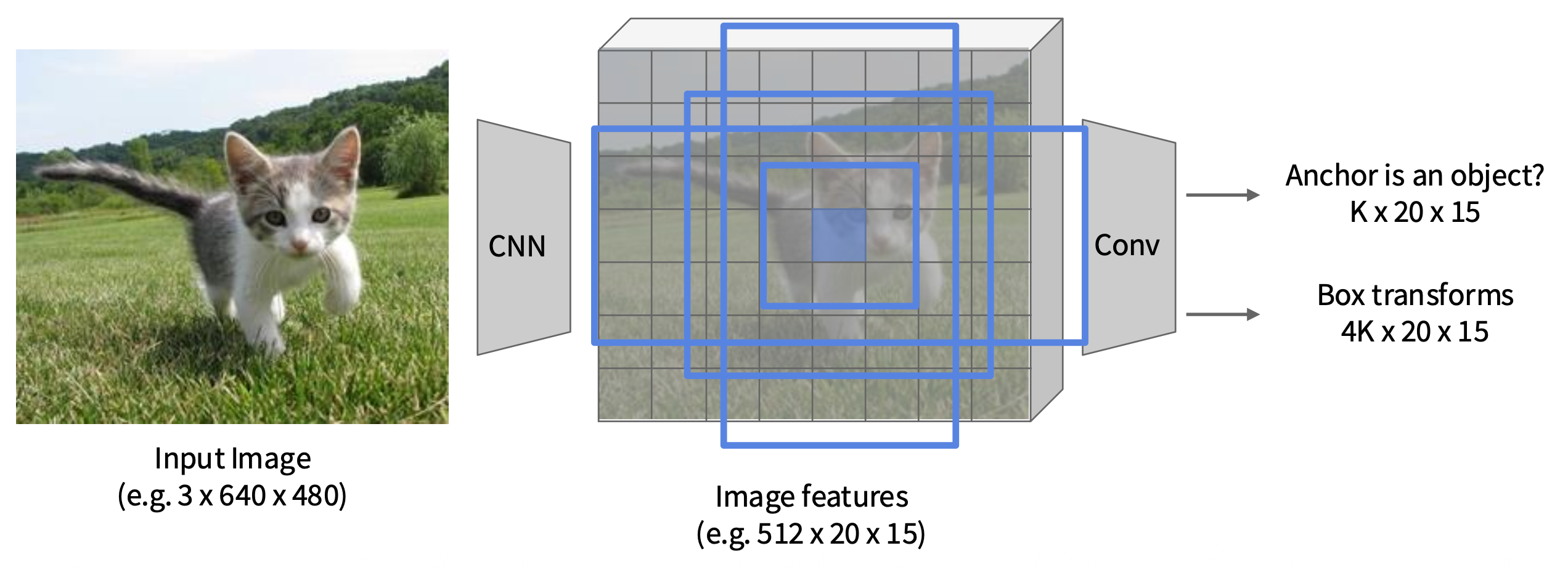
-
按“目标性 (objectness)”分数对 K*20*15 个盒子进行排序,取前大约 300 个作为建议
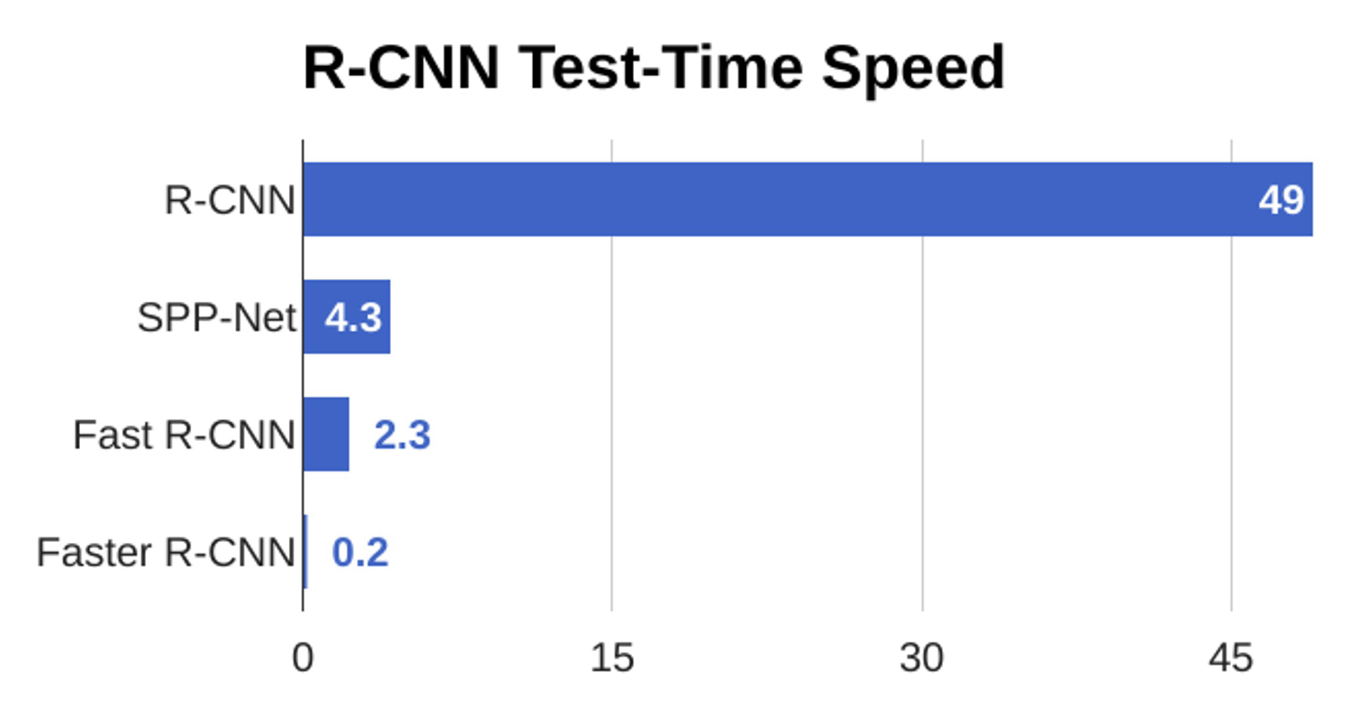
可以看到在测试数据上,更快的 R-CNN 确实是最快的:
R-CNN(以及各种变体)是一种两阶段的目标检测器:
-
第一阶段:每张图像运行一次
- 骨干网络 (backbone network)
- RPN
-
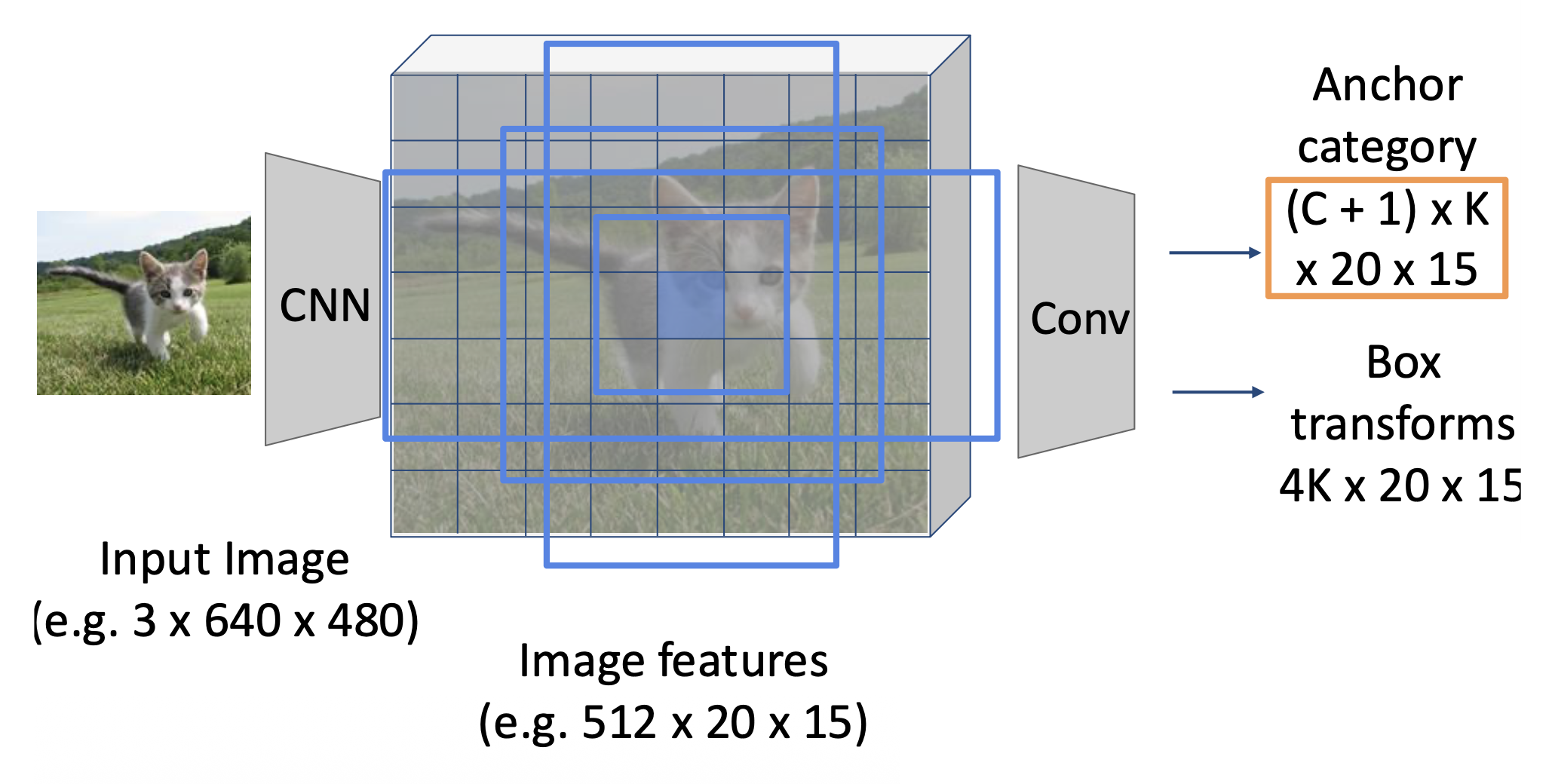
第二阶段:每个区域运行一次
- 裁剪特征:Rol 池化 / 对齐
- 预测目标类别
- 预测包围盒偏移量
Single-Stage Object Detection⚓︎
单阶段目标检测:
例子:
-
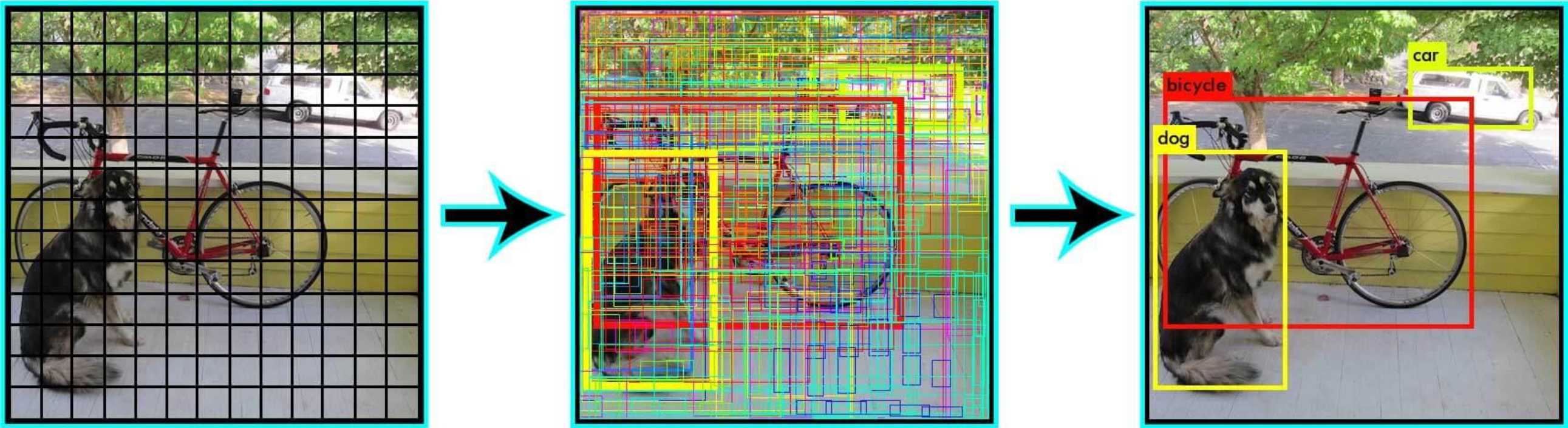
YOLO(You Only Look Once) 实时对象检测
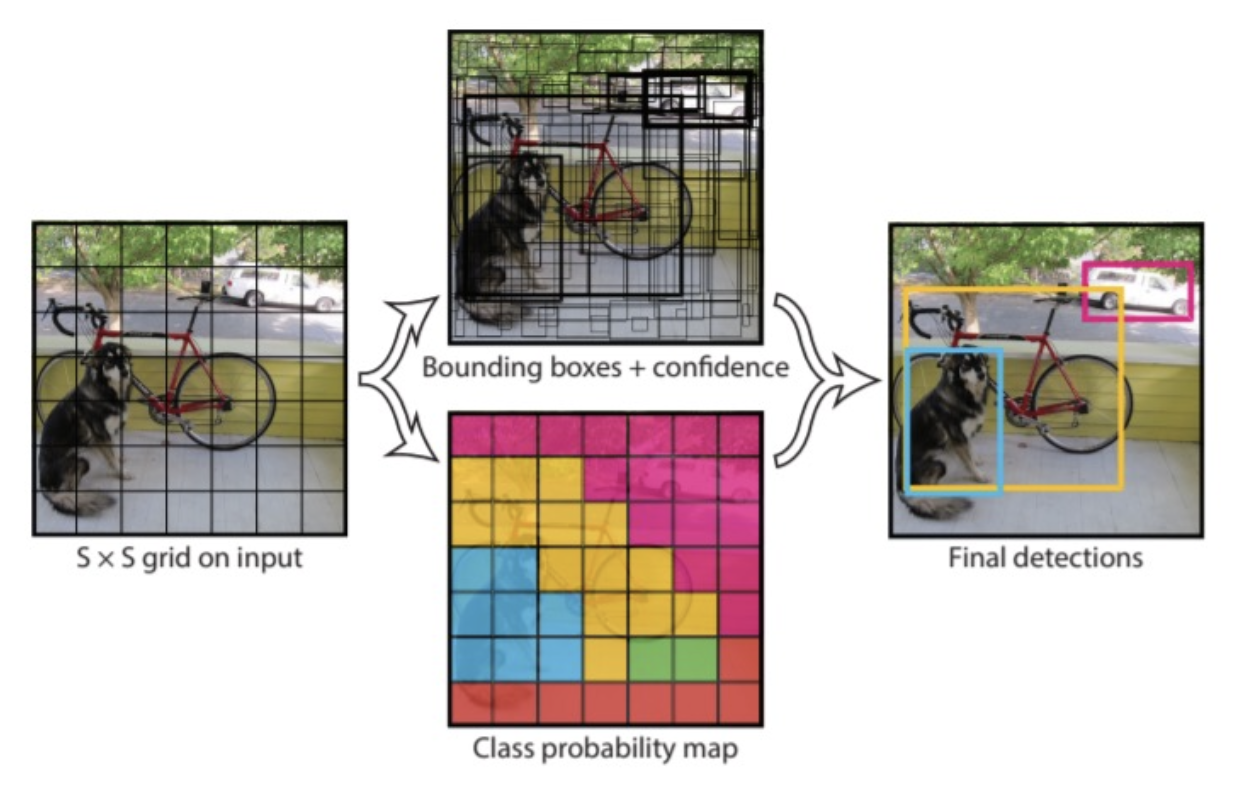
对于每个输出框:
- P(object):该框包含对象的概率
- B:包围盒 (x, y, h, w)(图中 B = 2)
- P(class):属于该类别的概率
-
SSD
- RetinaNet
两阶段 vs 单阶段
- 两阶段更准确
- 单阶段更快
DETR⚓︎
这块内容是额外补充的,没有在《计算机视觉导论》提到过。
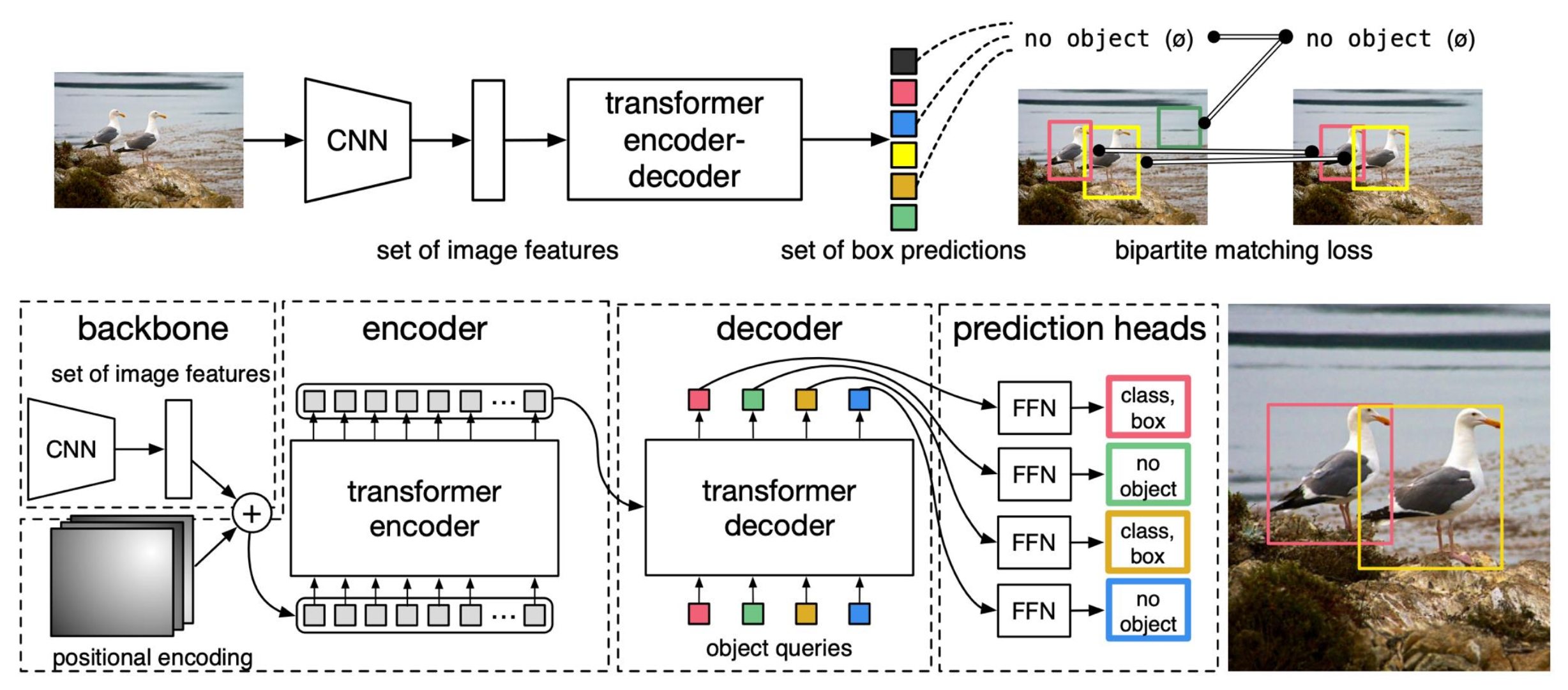
使用 Transformer 的目标检测:DETR
- 简单目标检测流程:直接从 Transformer 输出一组框
- 没有锚框,没有框变换的回归
- 通过二分图匹配 (bipartite matching) 将预测框与 GT 框匹配;训练回归框坐标
Instance Segmentation⚓︎
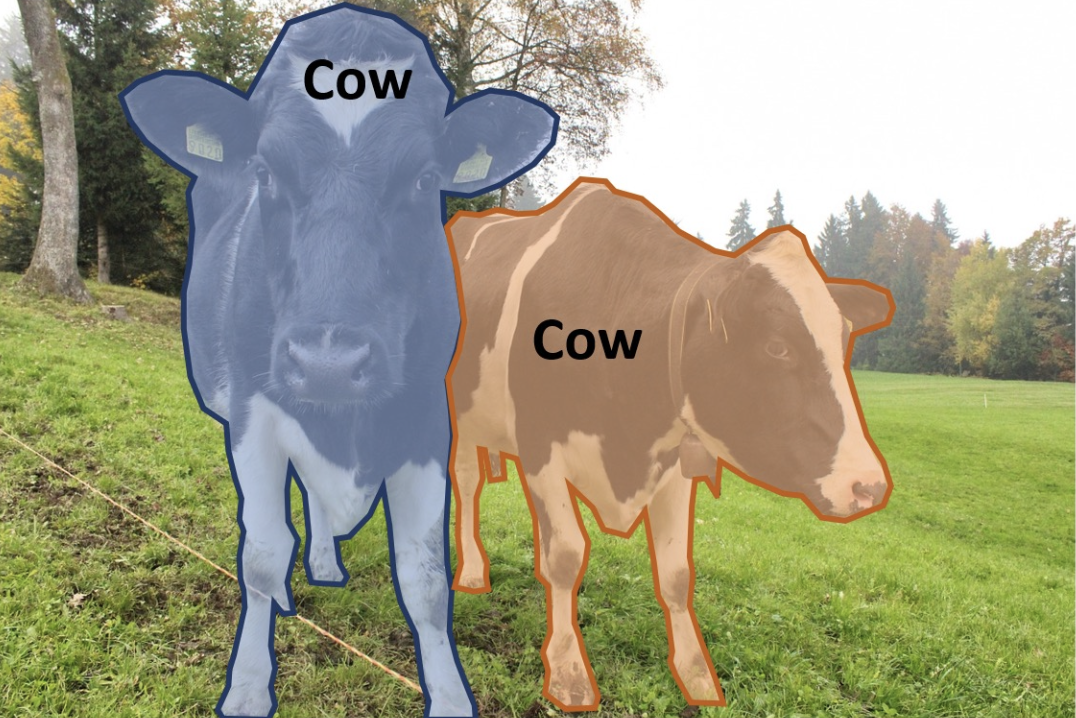
实例分割(instance segmentation) 的思路:
- 检测图像上的所有目标,识别出属于各目标的像素
- 执行目标检测,然后为每个目标预测一个分割掩码 (segmentation mask)
下面介绍一些实现方法。
Mask R-CNN⚓︎
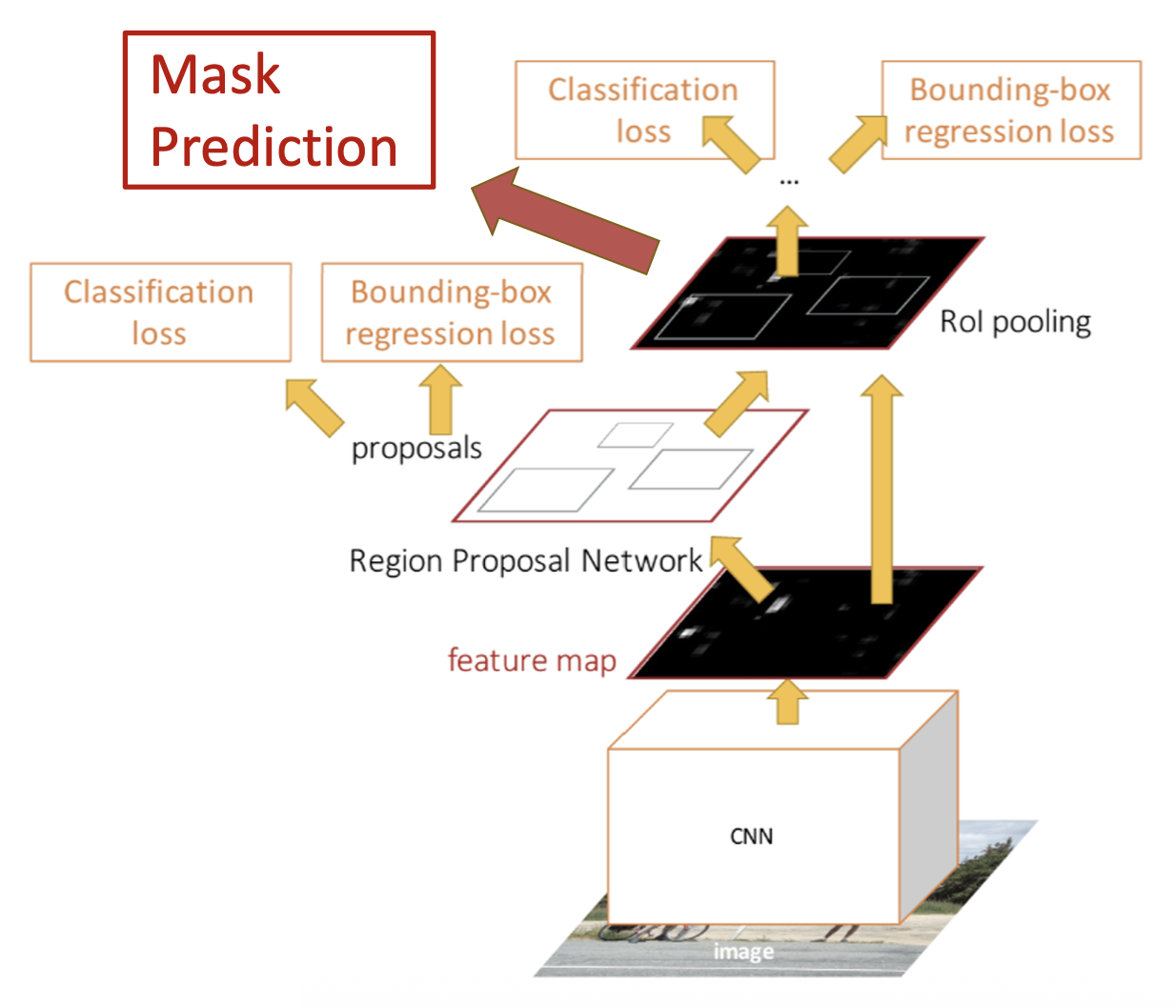
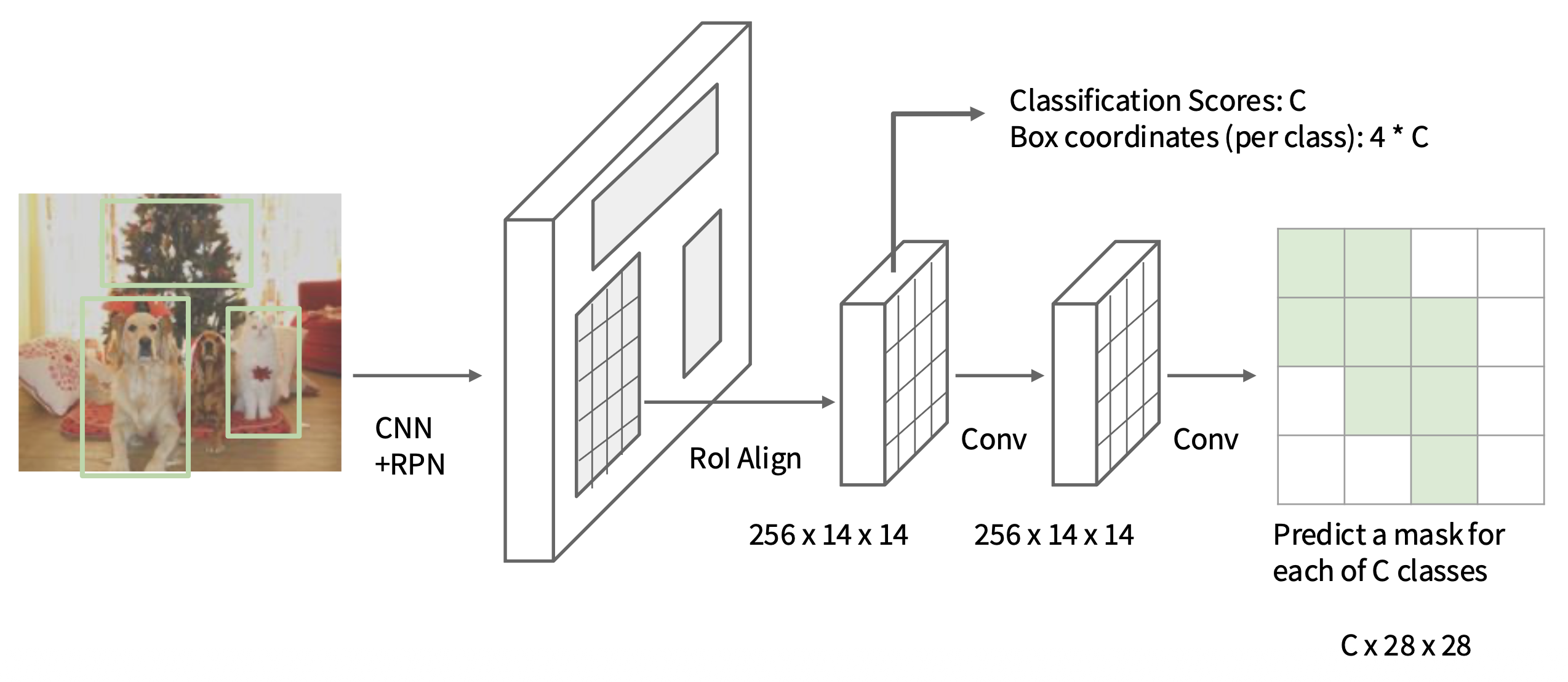
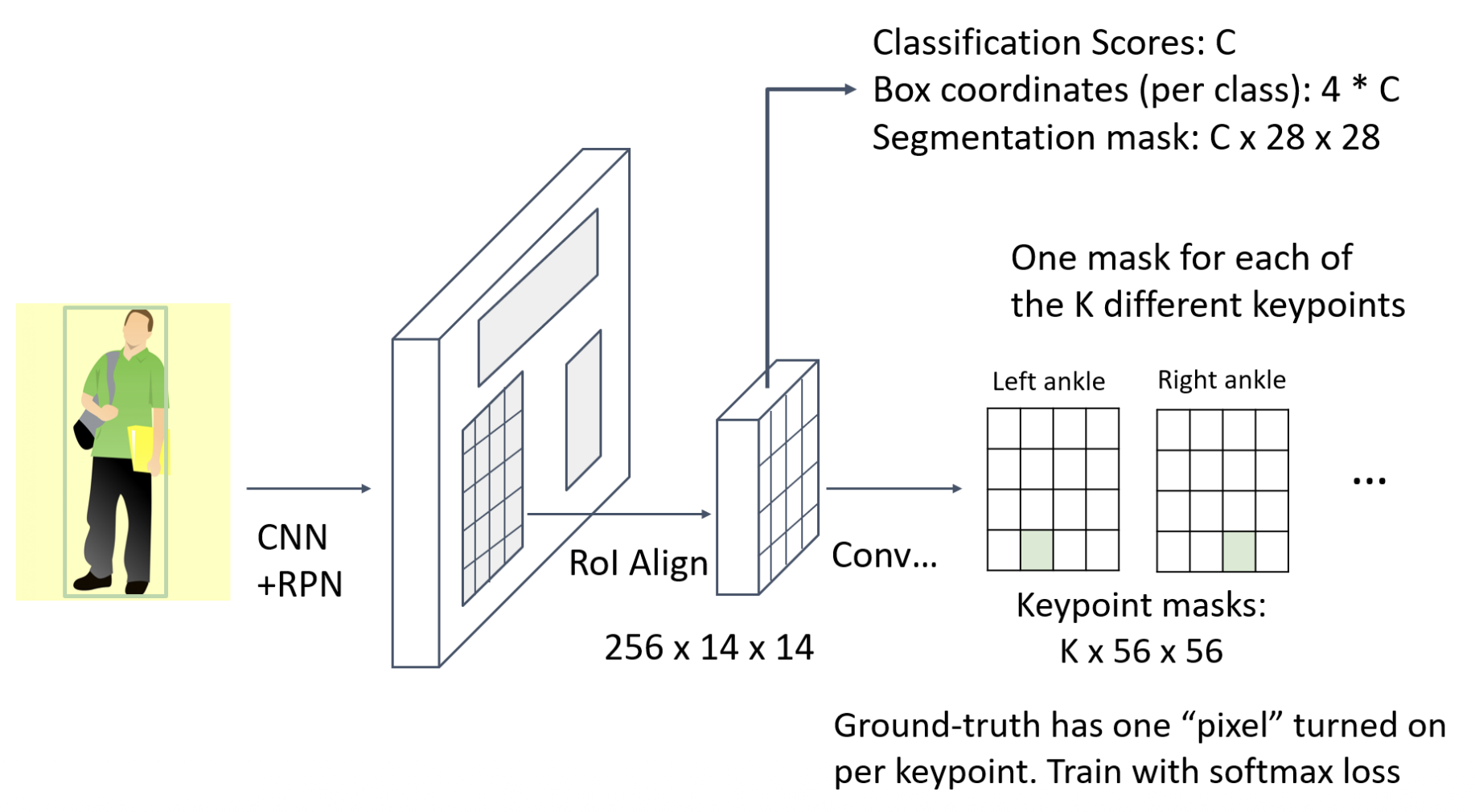
掩码 R-CNN(mask R-CNN):在更快的 R-CNN 基础上增加一个掩码预测。
例子
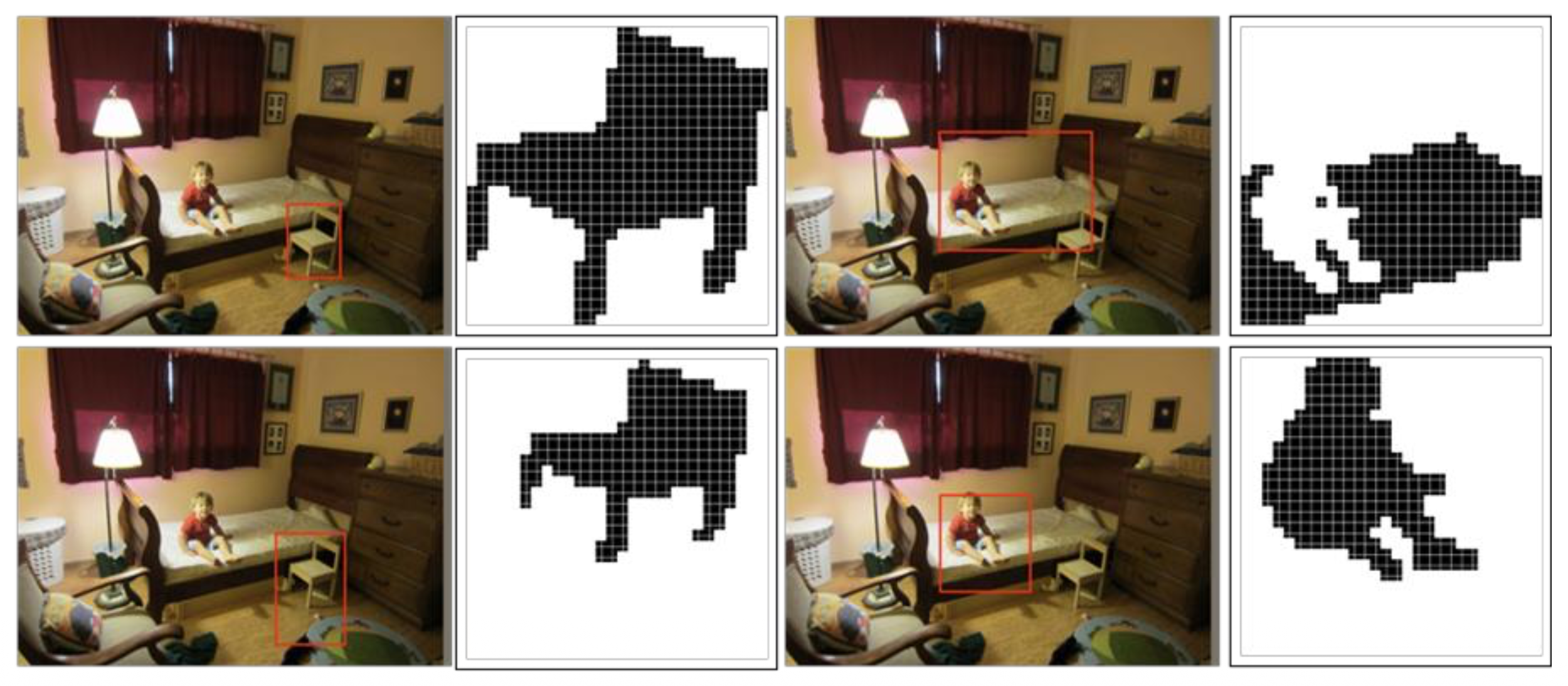
样例掩码训练目标:
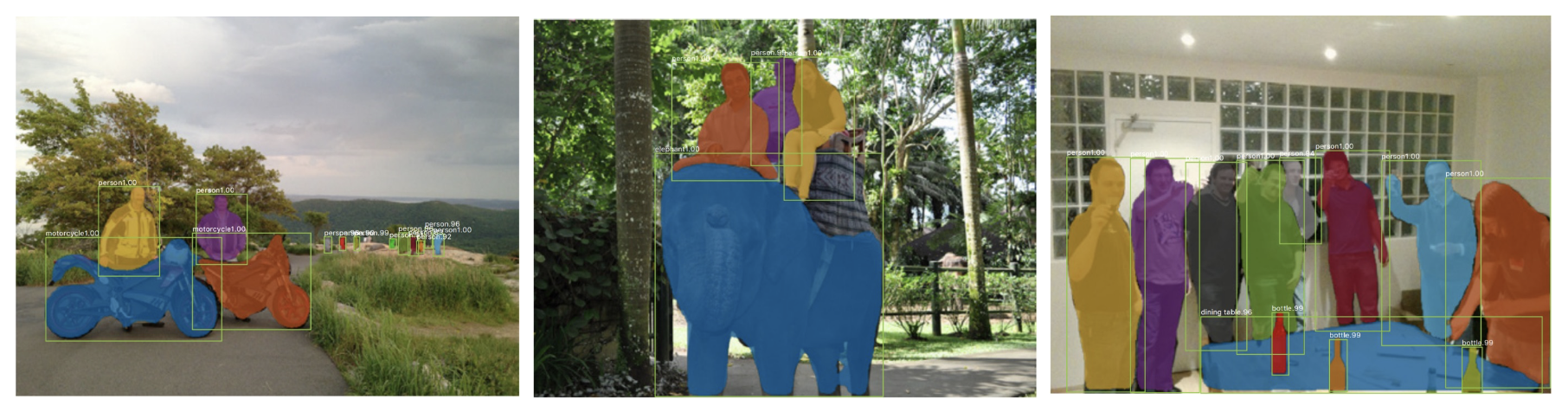
可以看到效果非常好:
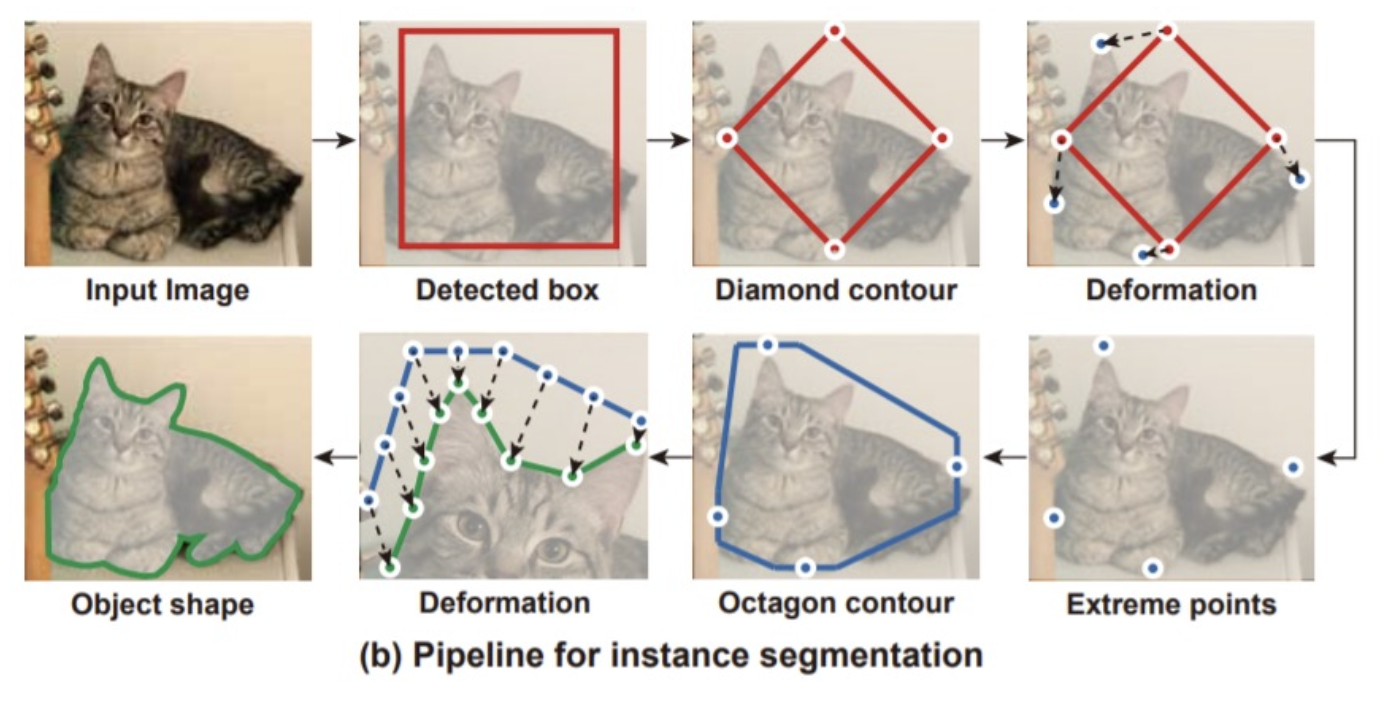
深蛇 (deep snake)
利用轮廓 (contours)
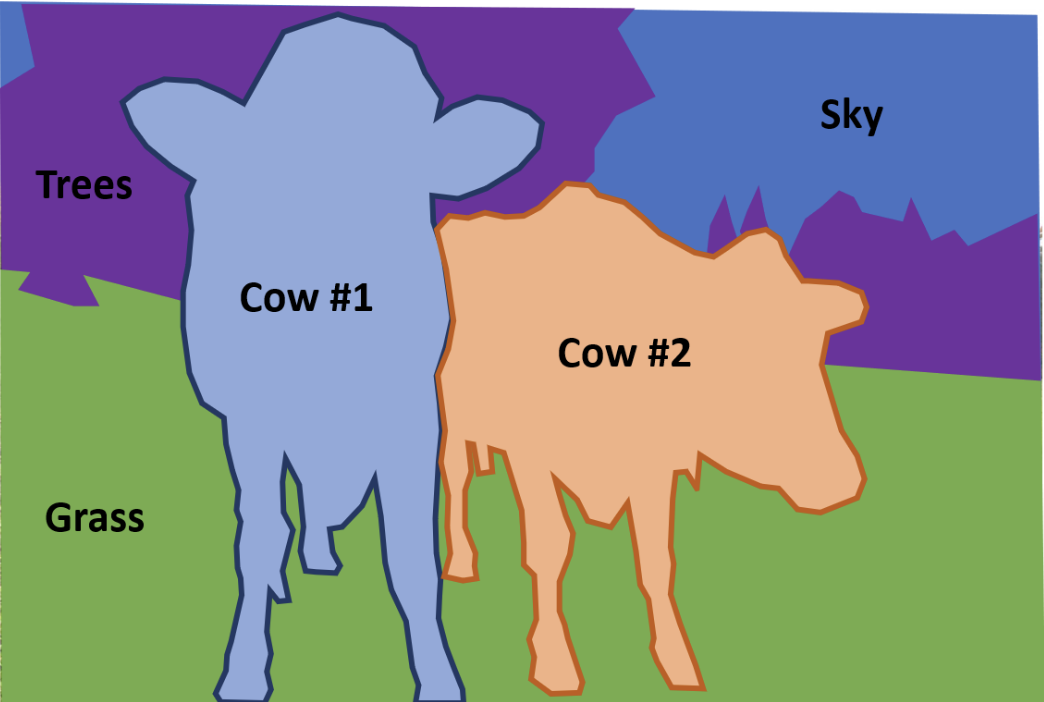
Panoptic Segmentation⚓︎
全景分割(panoptic segmentation)
- 标注图像中所有像素(包括事物和物品)
- 对于“事物”类别,也分别标注实例
效果:

Datasets⚓︎
近几年,实例分割任务的常用数据集是 Microsoft COCO。
- 118K 训练数据
- 5K 验证数据
- 包含了:目标检测、关键点、实例分割、全景分割

Human Pose Estimation⚓︎
人体姿态估计(human pose estimation):通过定位一组关键点(keypoints) 来表示人体姿态。比如可以提取以下 17 个关键点:
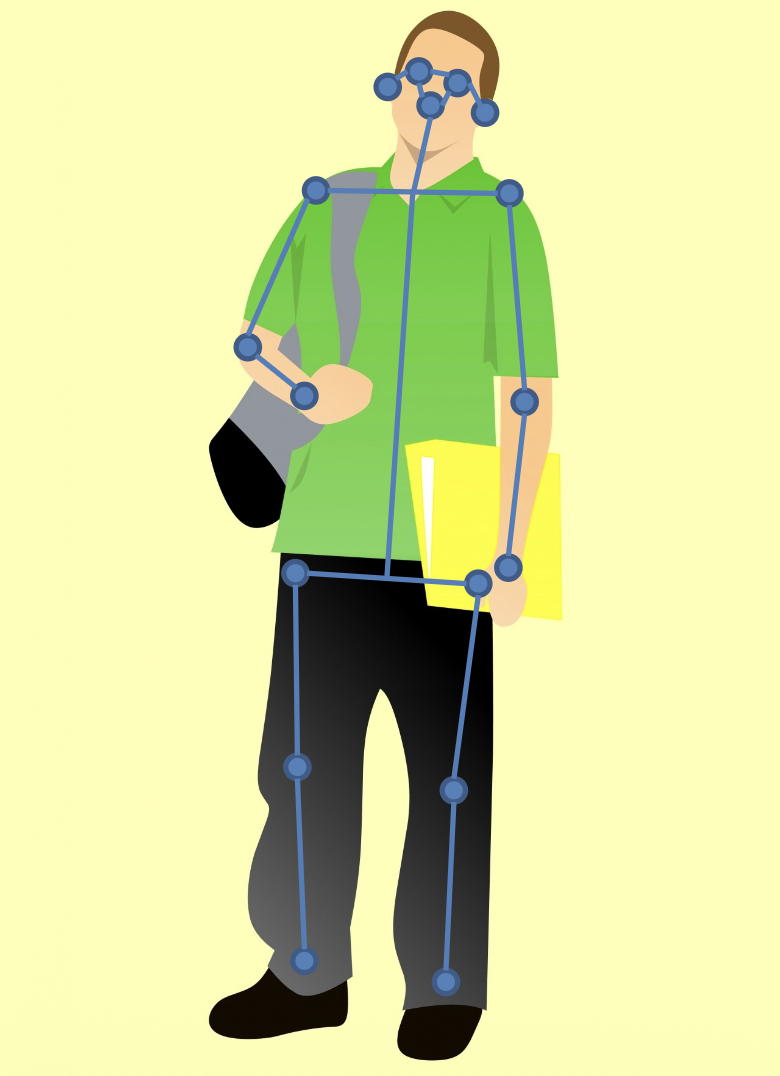
- 鼻子
- 左 / 右眼
- 左 / 右耳
- 左 / 右肩
- 左 / 右肘
- 左 / 右腕 (wrist)
- 左 / 右髋 (hip)
- 左 / 右膝
- 左 / 右踝 (ankle)
使用深度传感器(depth sensor) 进行人体姿态估计:
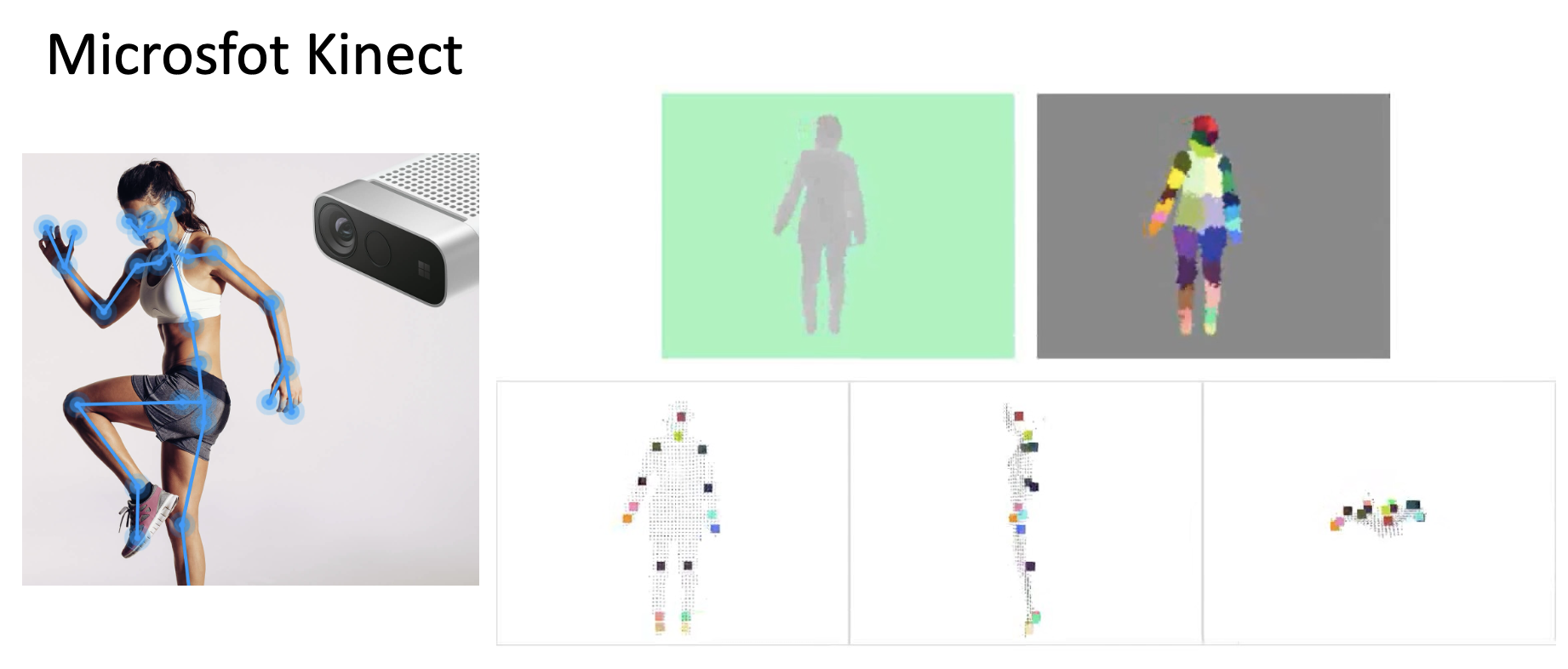
Single Human⚓︎
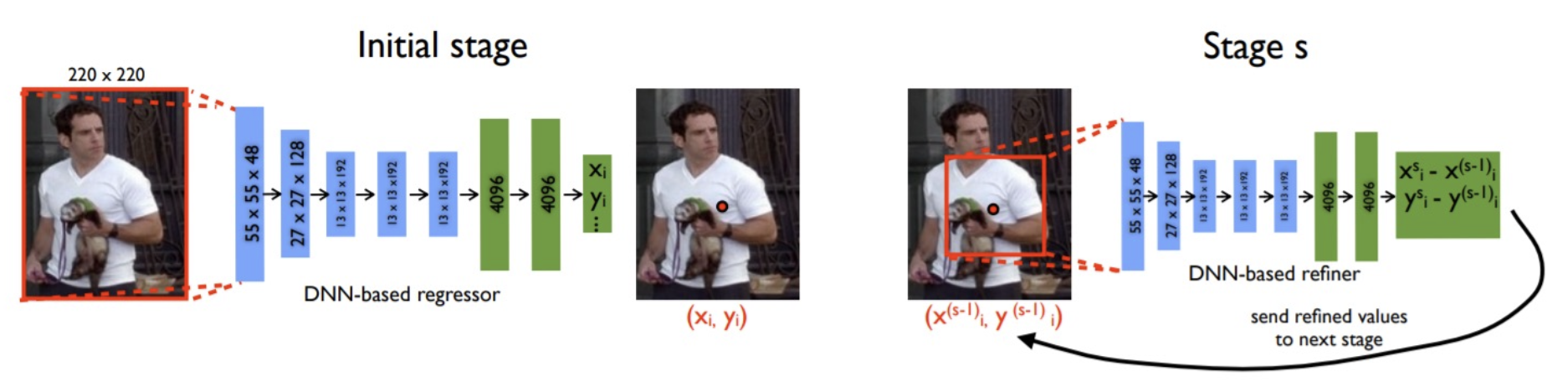
如果只有一个人,
-
可以直接预测关节位置(一个 17*2 的向量)
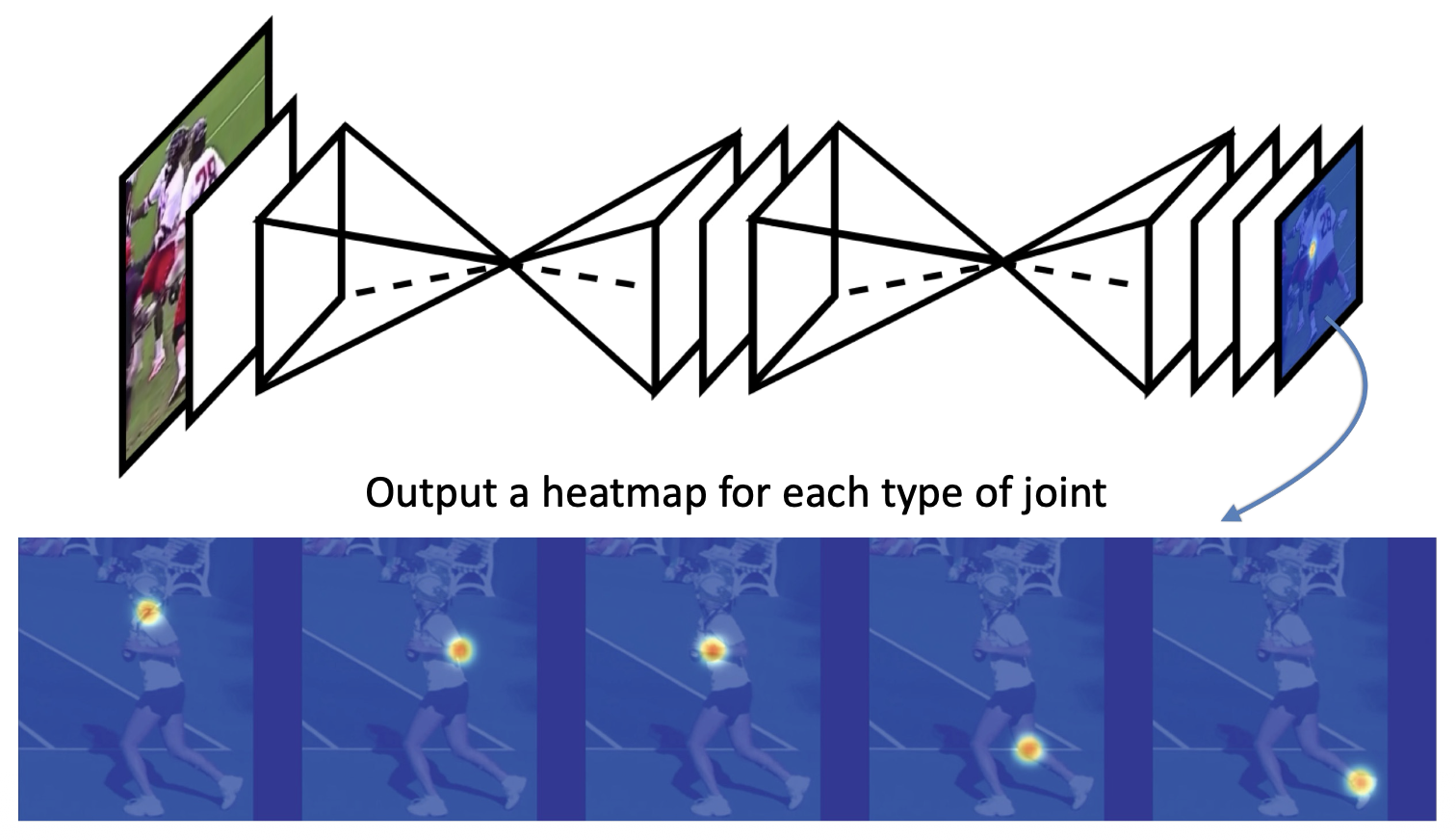
-
使用热图(heatmap) 表示关节位置:
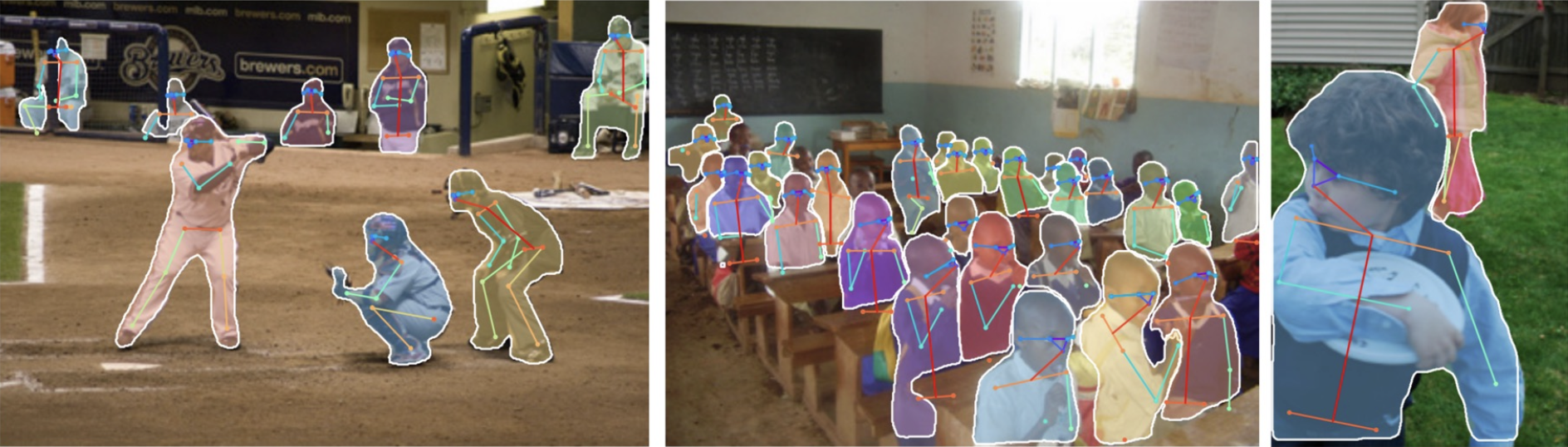
Multiple Humans⚓︎
如果有多个人,我们有以下两种方案:
-
自顶向下:
- 检测每个包围盒内的人体和关键点(更精确)
-
例子:掩码 R-CNN
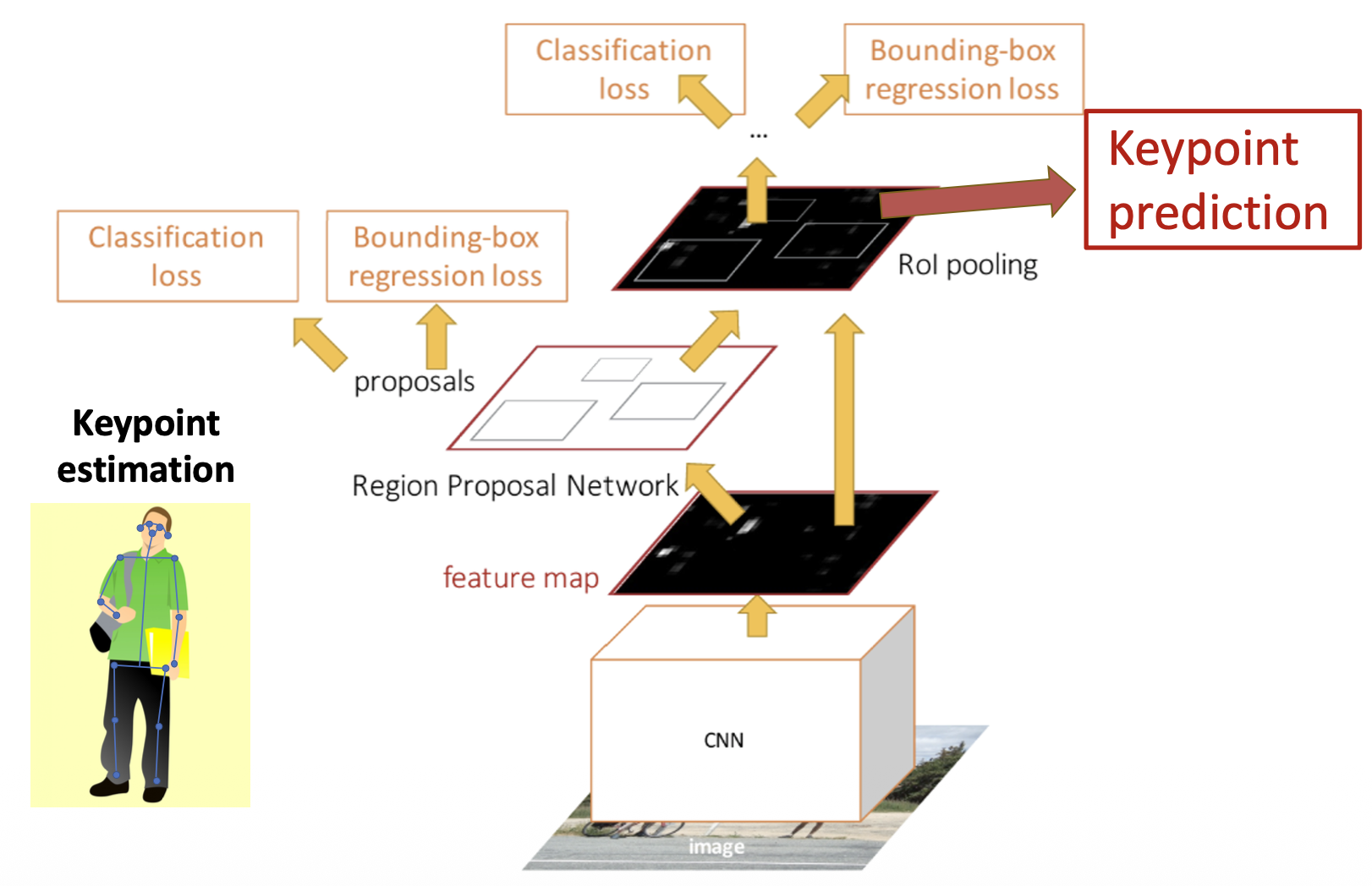
-
具体过程:
-
效果:
-
-
自底向上
- 检测关键点和组关键点来构成人体(更快)
-
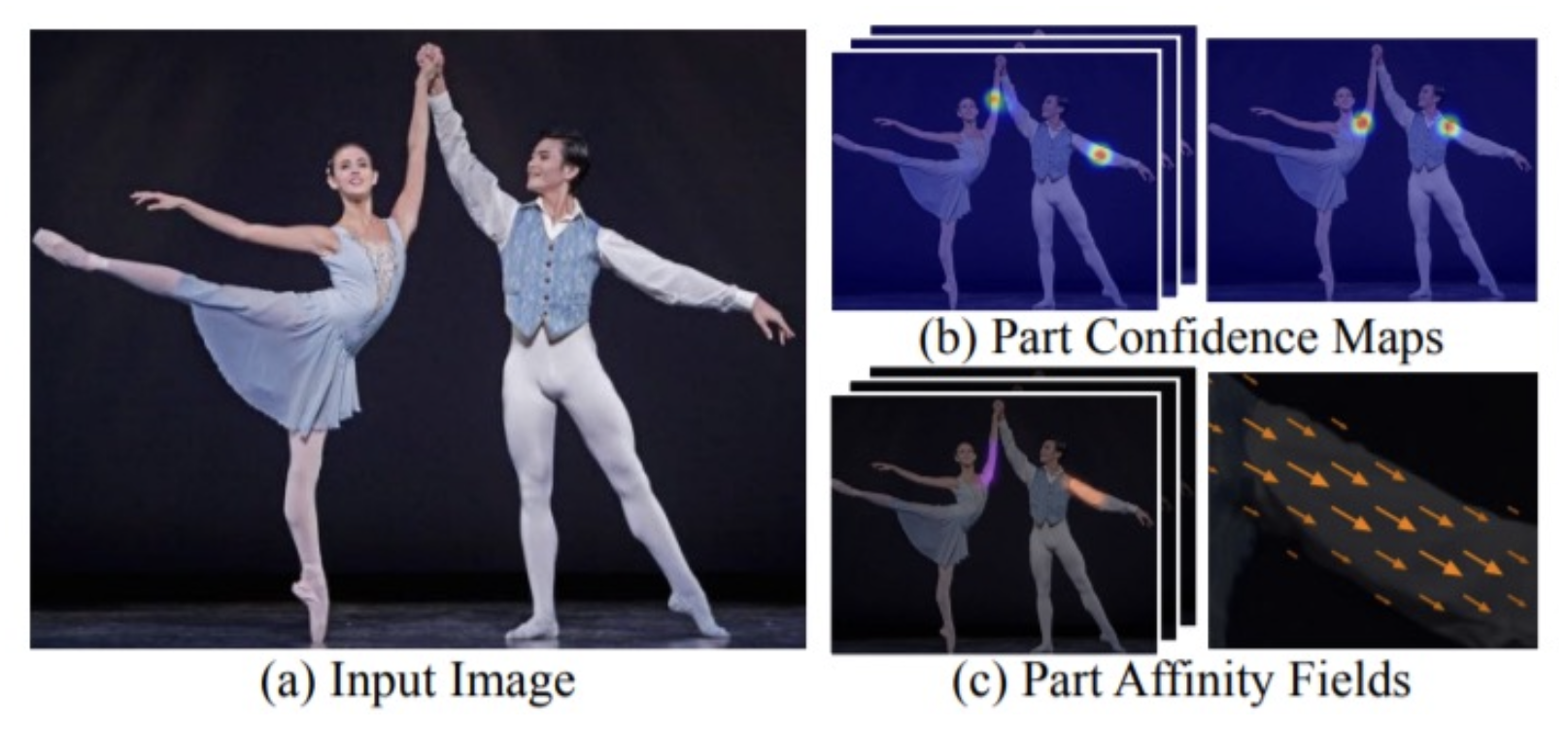
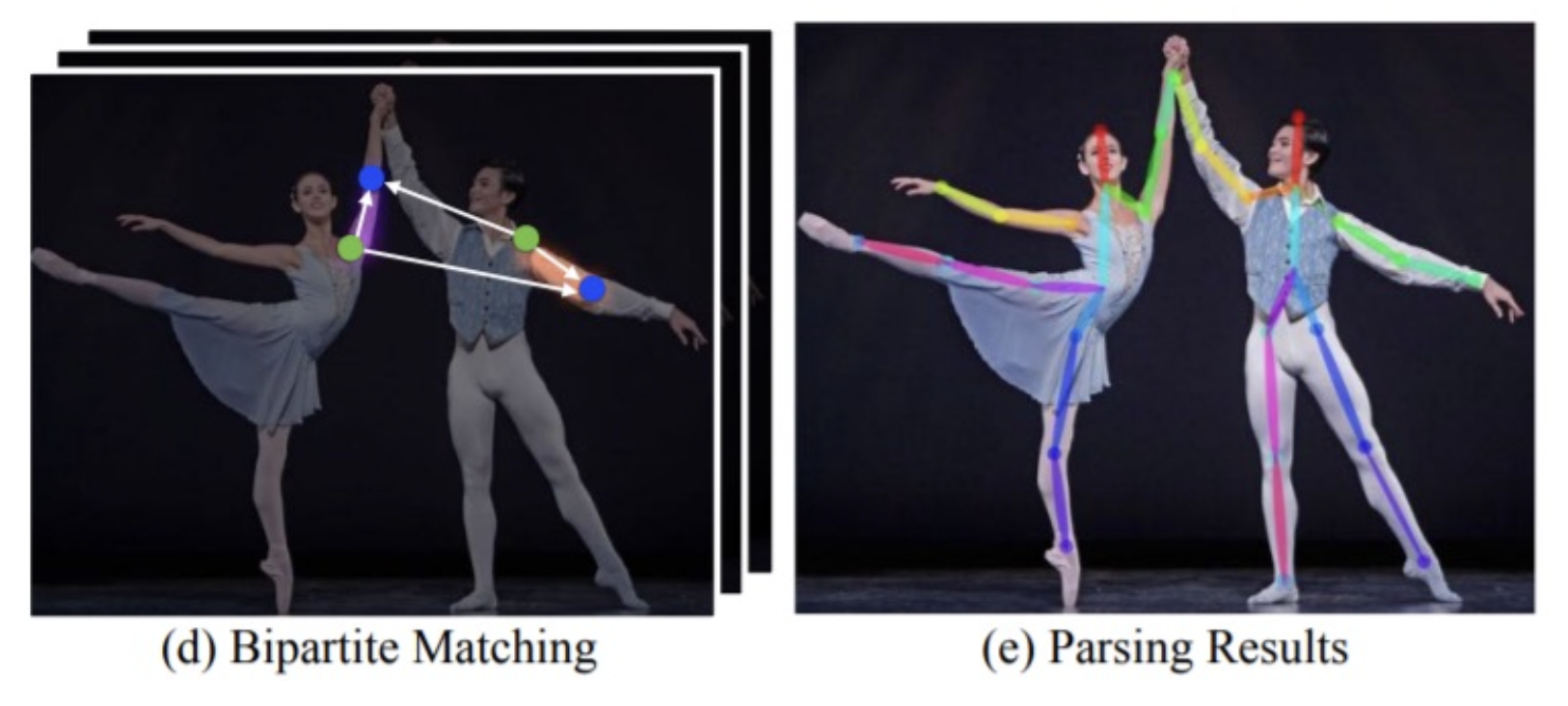
例子:OpenPose
-
基于部分亲和域(part affinity field) 连接部分
-
效果(视频链接:https://www.youtube.com/watch?v=mxKlUO_tjcg
) :
-
Other Tasks⚓︎
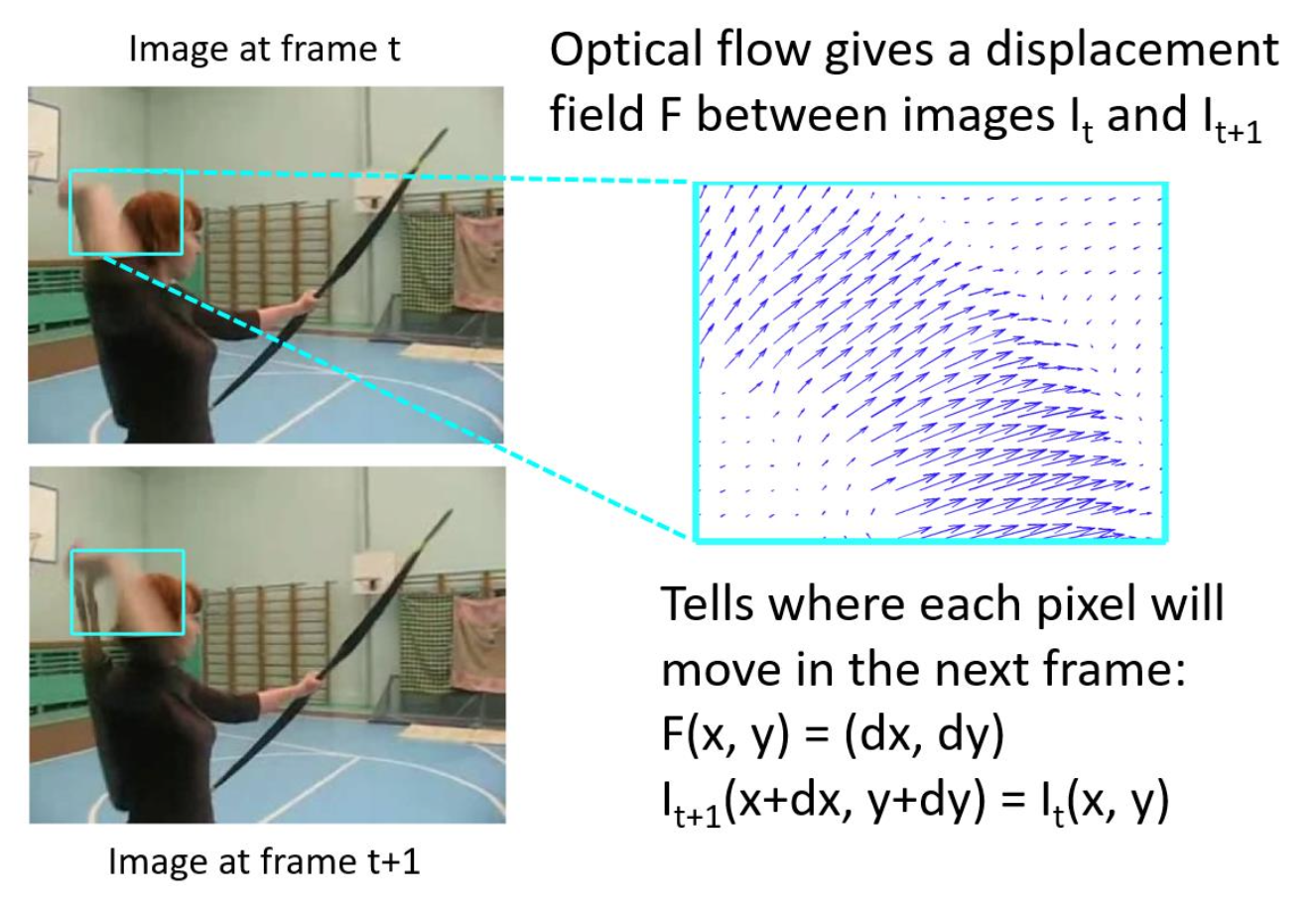
Optical Flow⚓︎
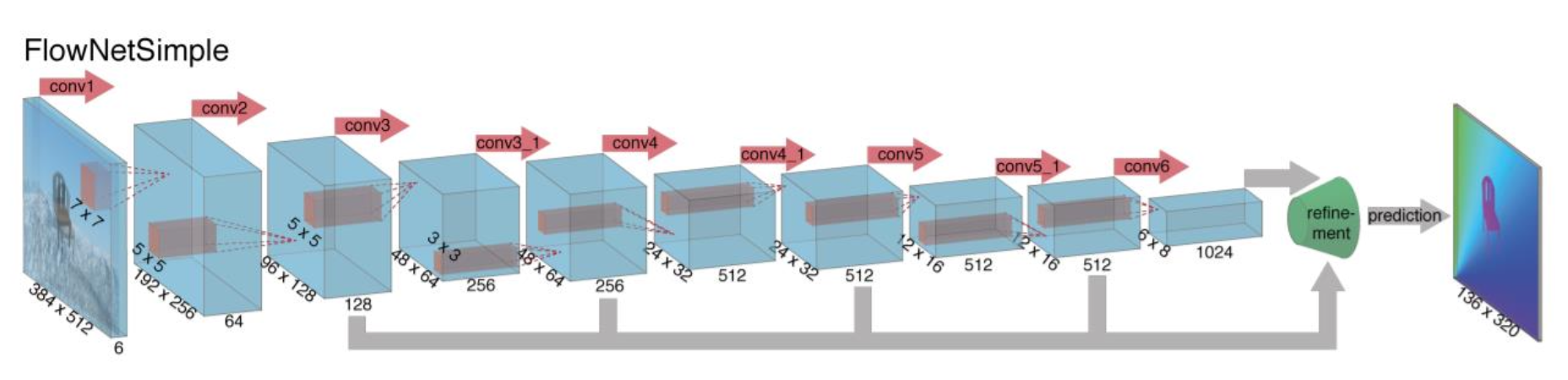
光流(optical flow):给定两张相邻帧图像,判断图像每个像素是如何移动的。
实现方法:
-
直接通过拼接两张图像来预测流?
- 不可行!无法利用梯度优化让网络学习这种映射
-
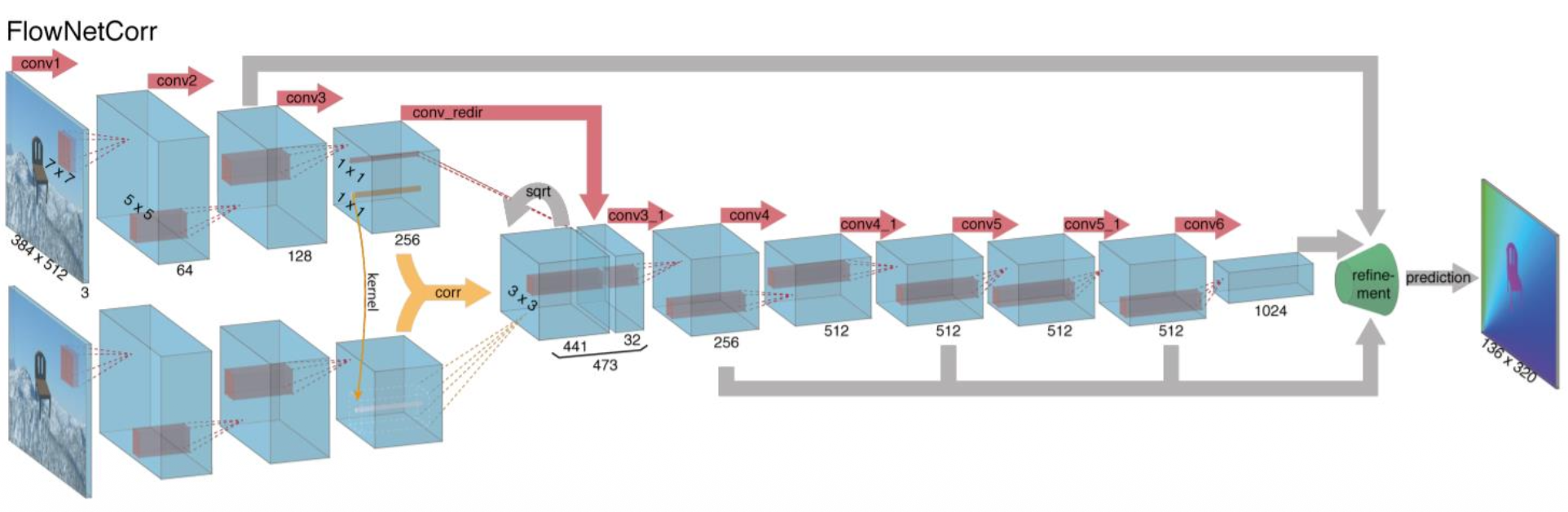
FlowNet:将经典方法整合到网络中
- 通过比较局部块 (local patches) 来估计流动
- 从成本体积(cost volume) 中估计流动
-
RAFT:SOTA 方法,从粗到细的成本体积中迭代估计流动

Video Classification⚓︎
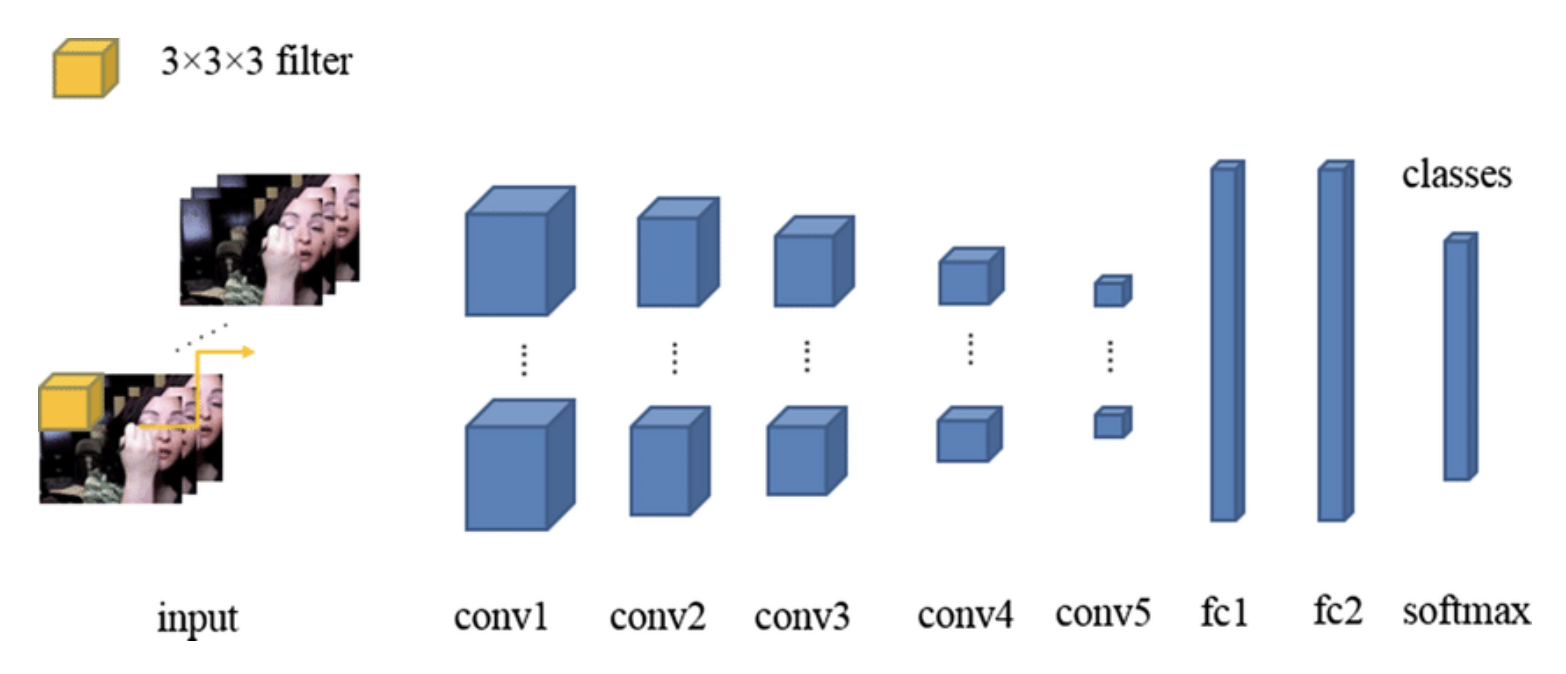
视频分类(video classification)
-
3D CNNs
-
时间动作定位(temporal action localization):给定一个未修剪的长视频序列,识别对应于不同动作的帧,生成建议后再分类

-
时空检测(spatial-temporal detection):给定一段未剪辑的长视频,检测所有人在时间和空间中的活动,并对他们所进行的活动进行分类
Multi-Object Tracking⚓︎
多目标追踪(multi-object tracking):识别和追踪属于一个或多个类别的目标,无需事先了解目标的外观和数量

评论区