Robot Learning⚓︎
约 1817 个字 预计阅读时间 9 分钟
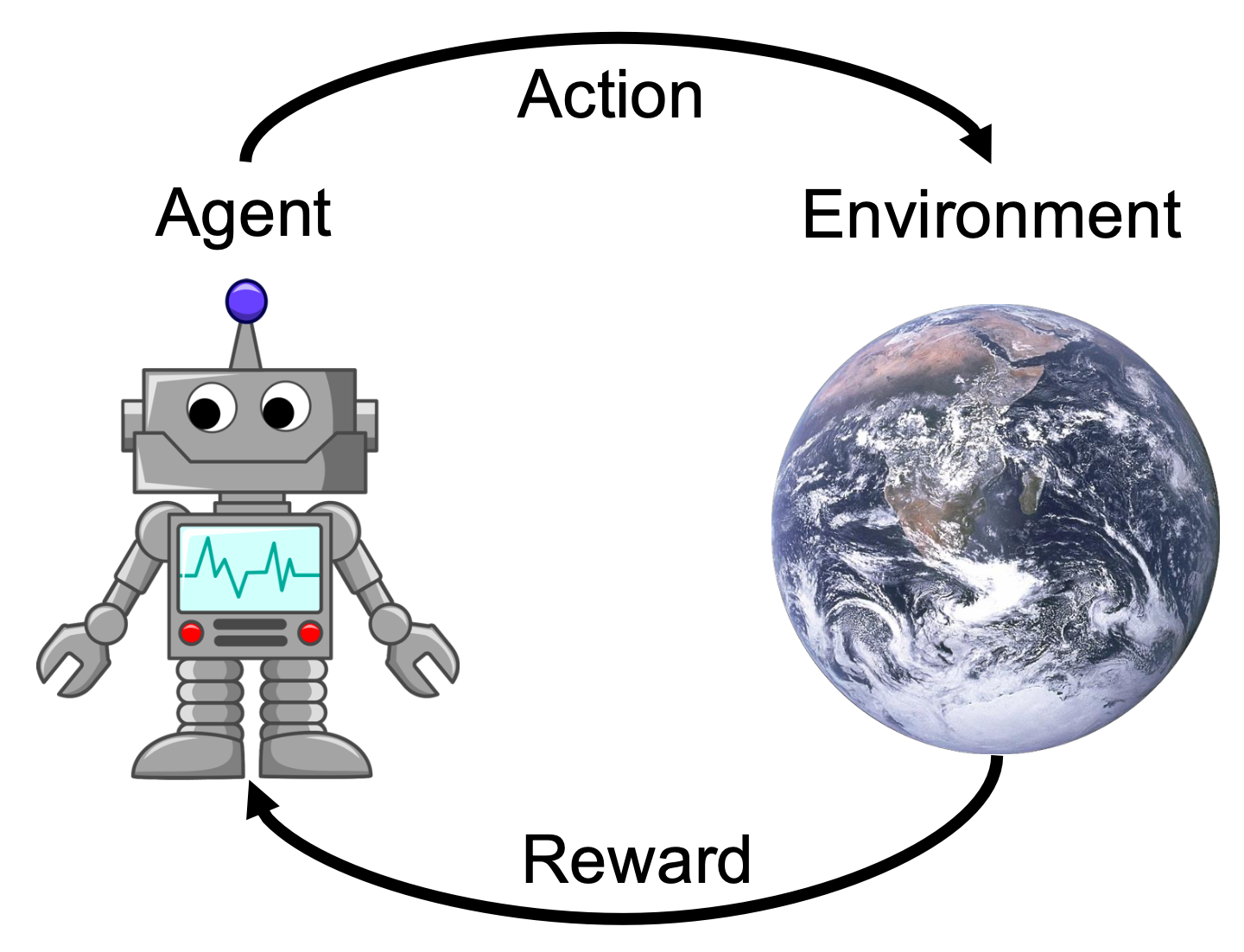
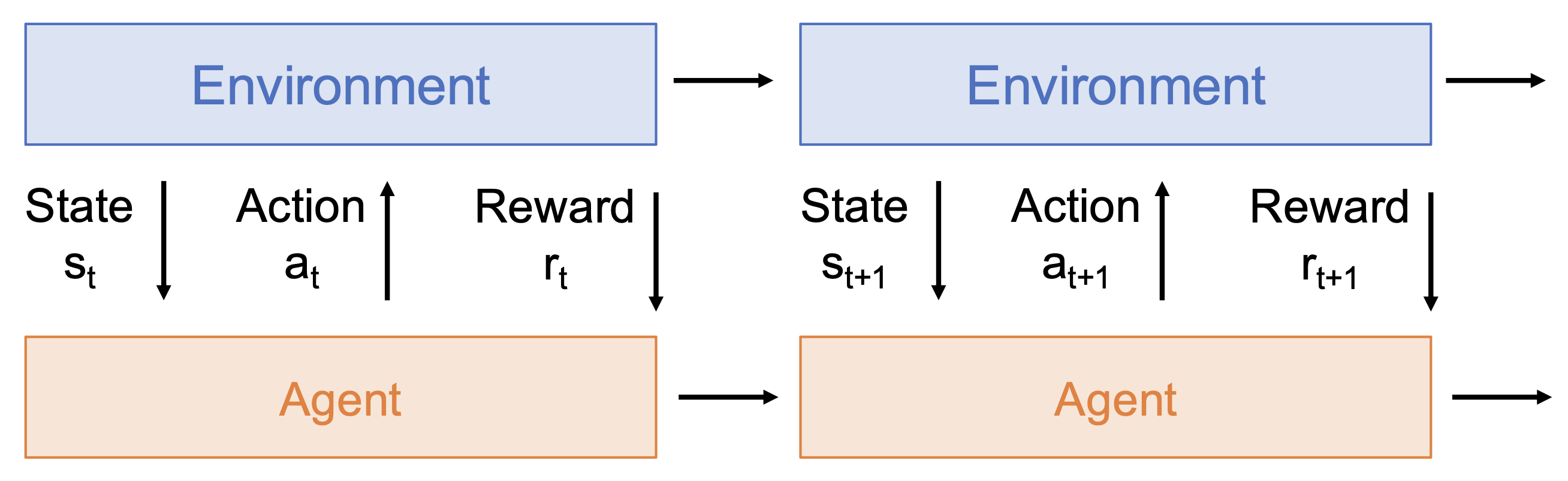
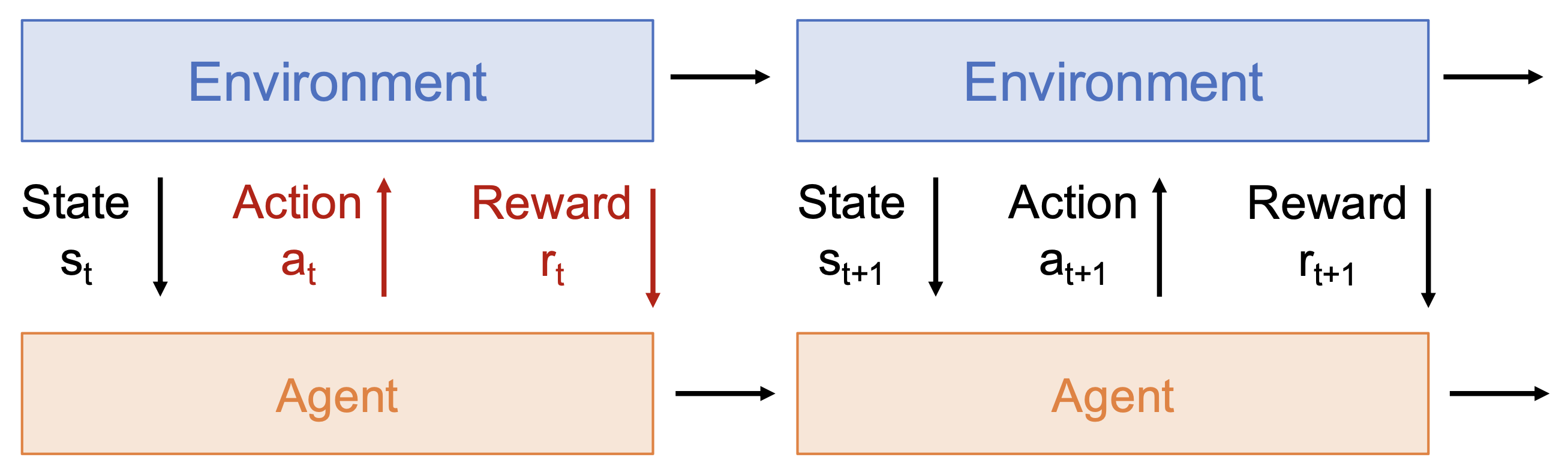
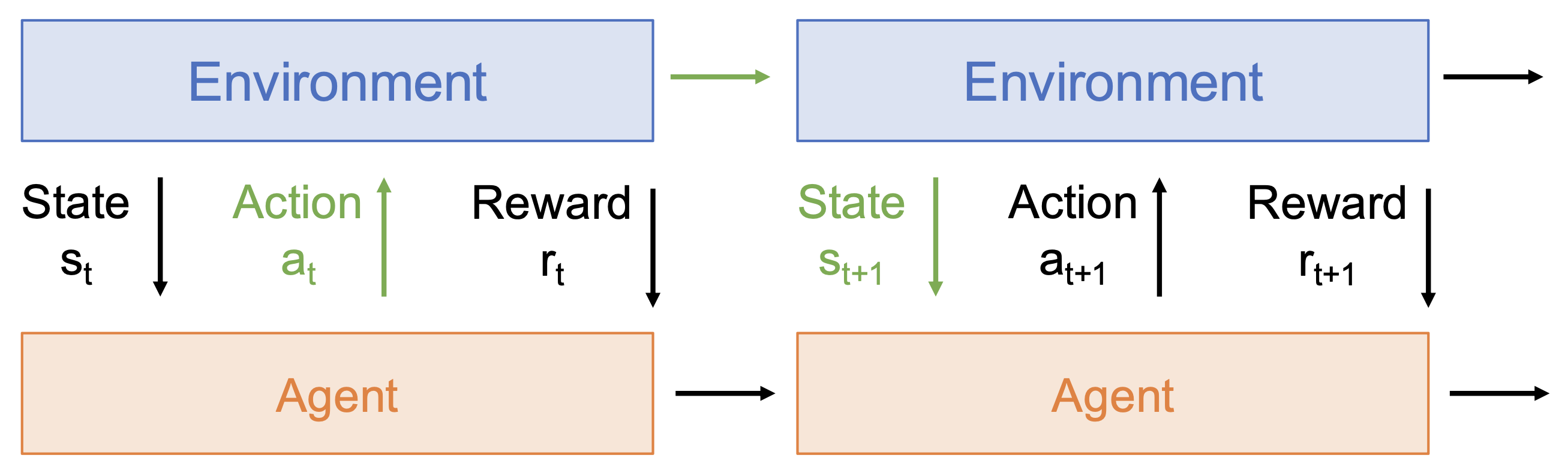
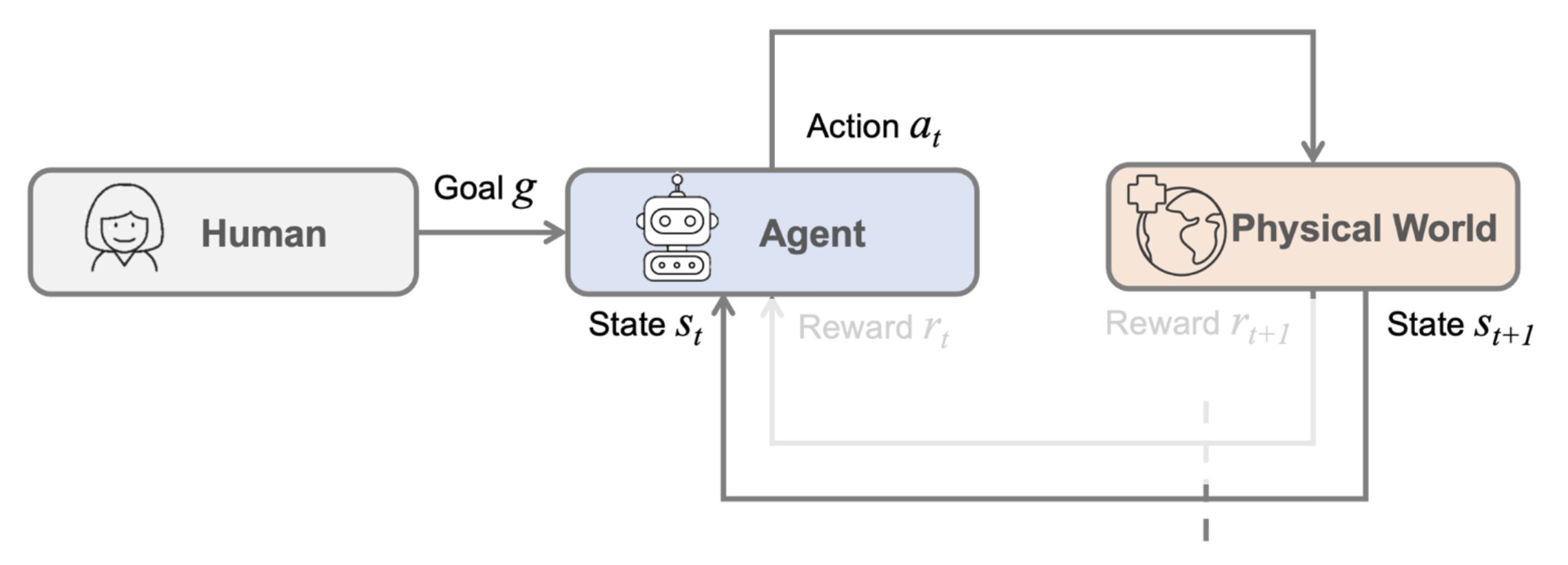
机器人学习是指让智能体在环境(environment) 中执行行动(actions),并获得奖励(rewards) 的问题。其目标是学会采取能够最大化奖励的行动。
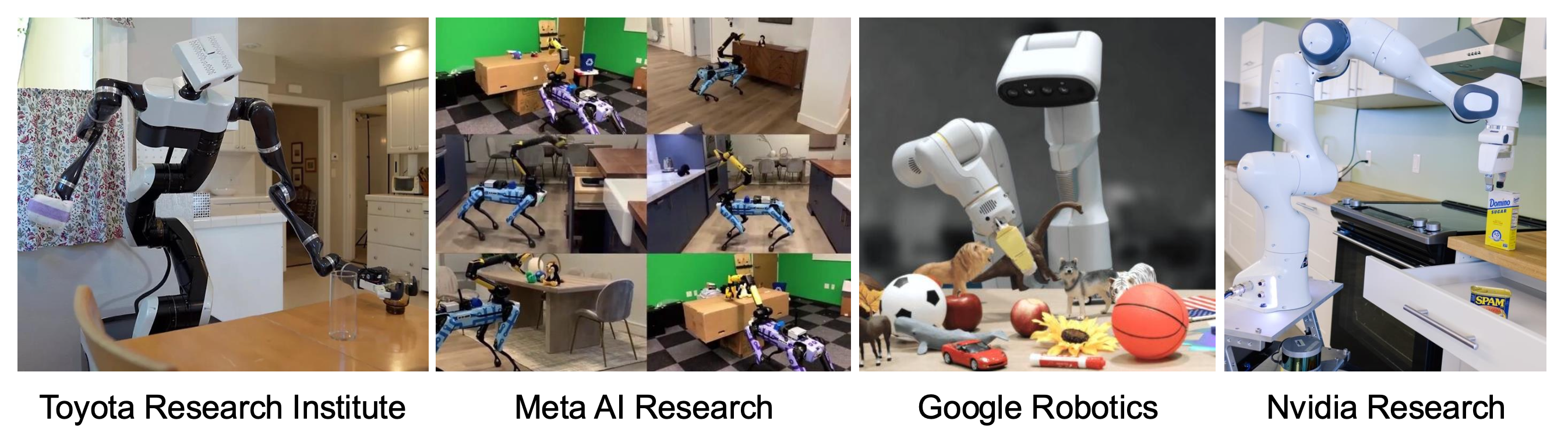
这是一个快速增长的领域:
Problem Formulation⚓︎
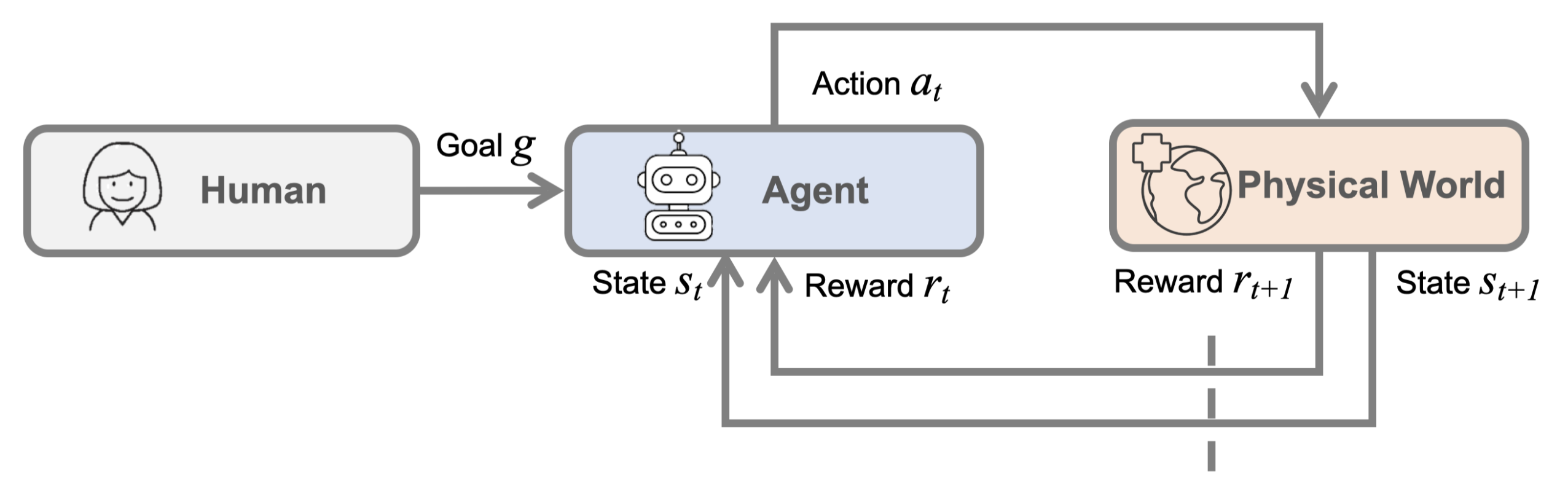
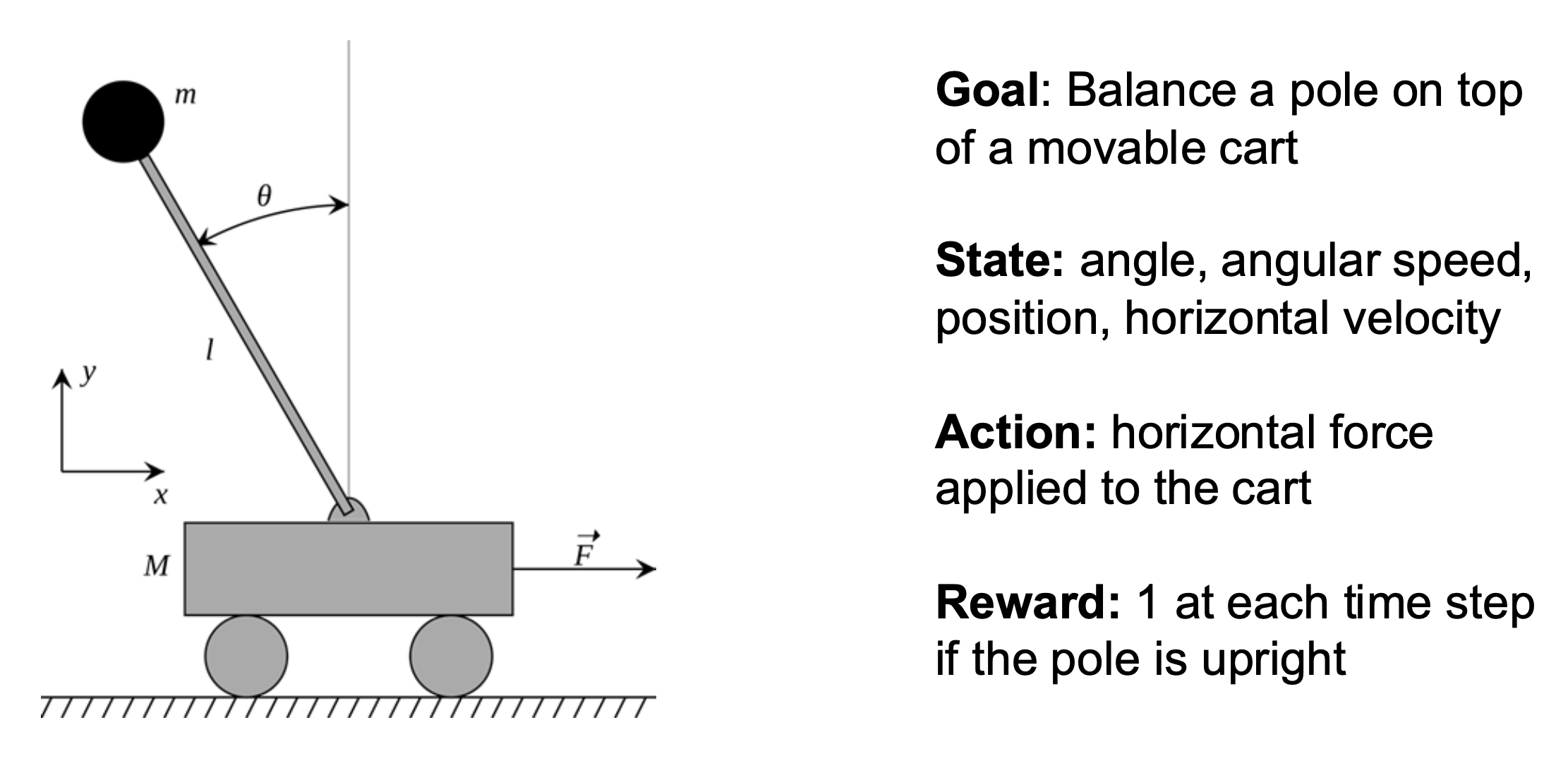
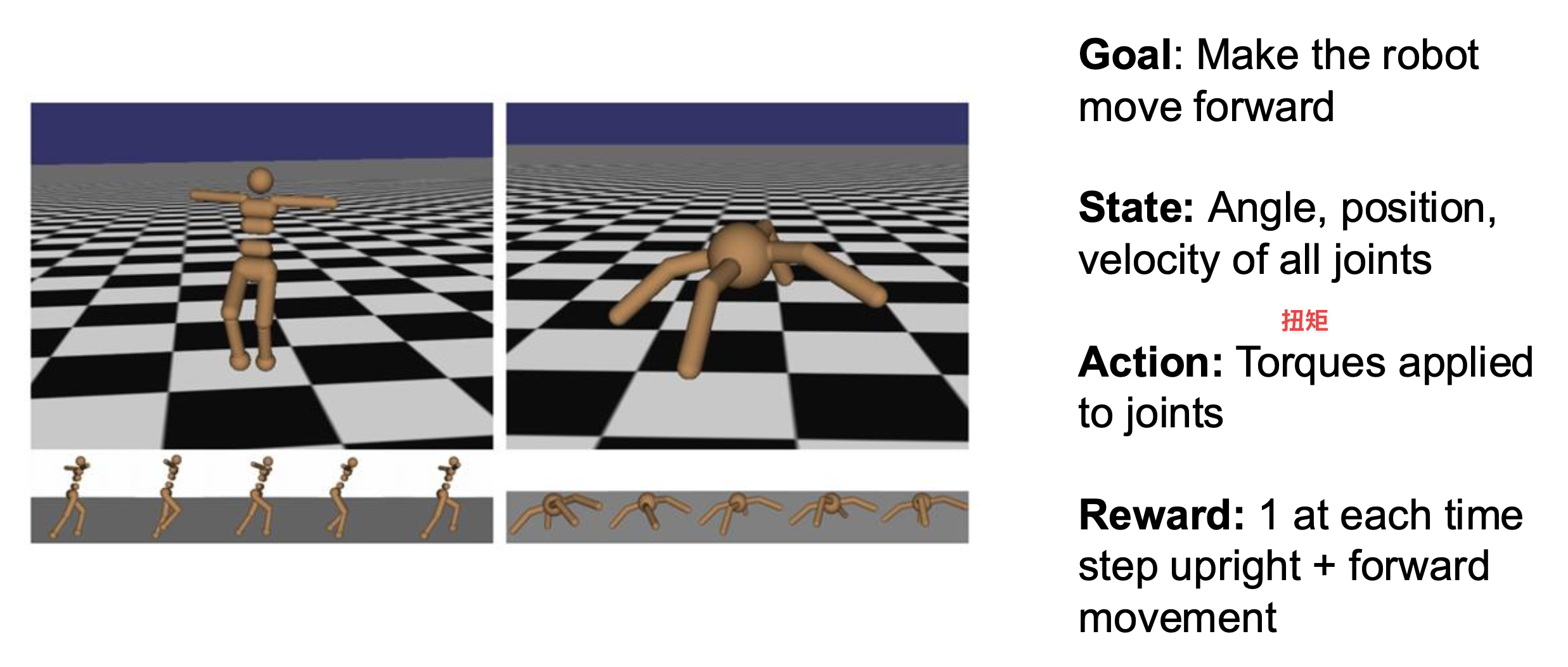
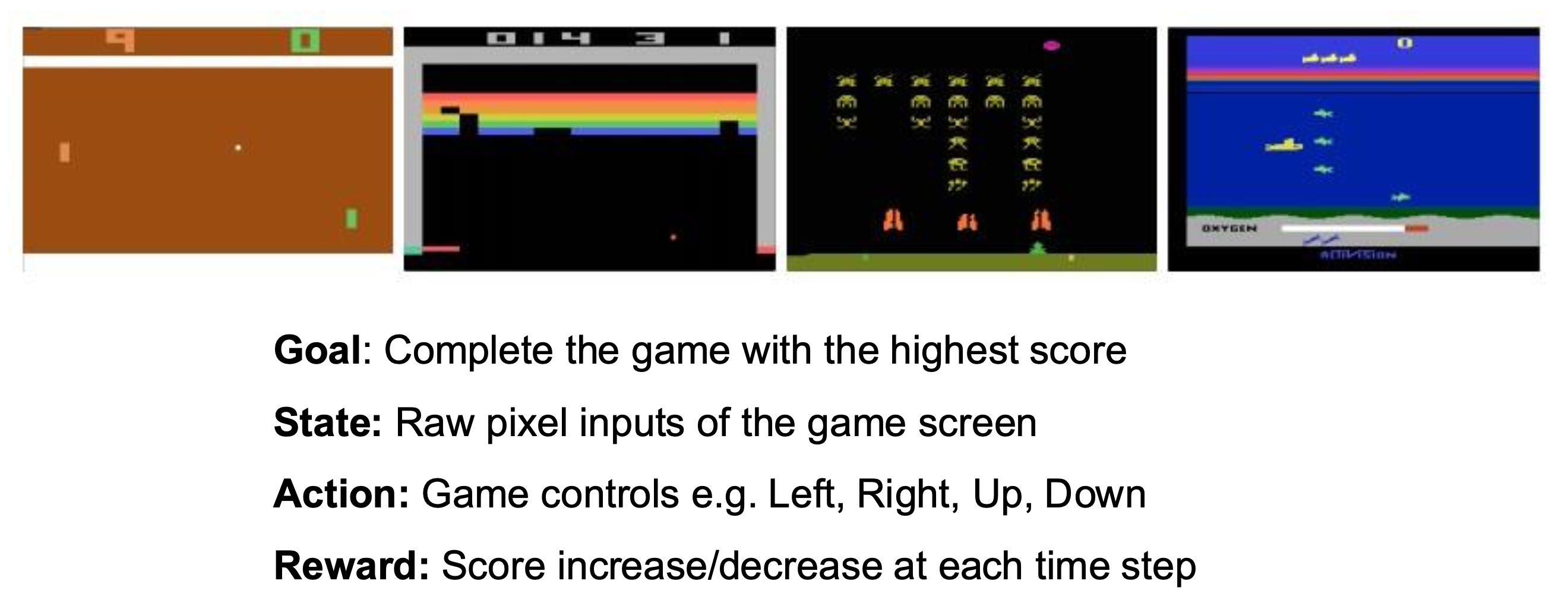
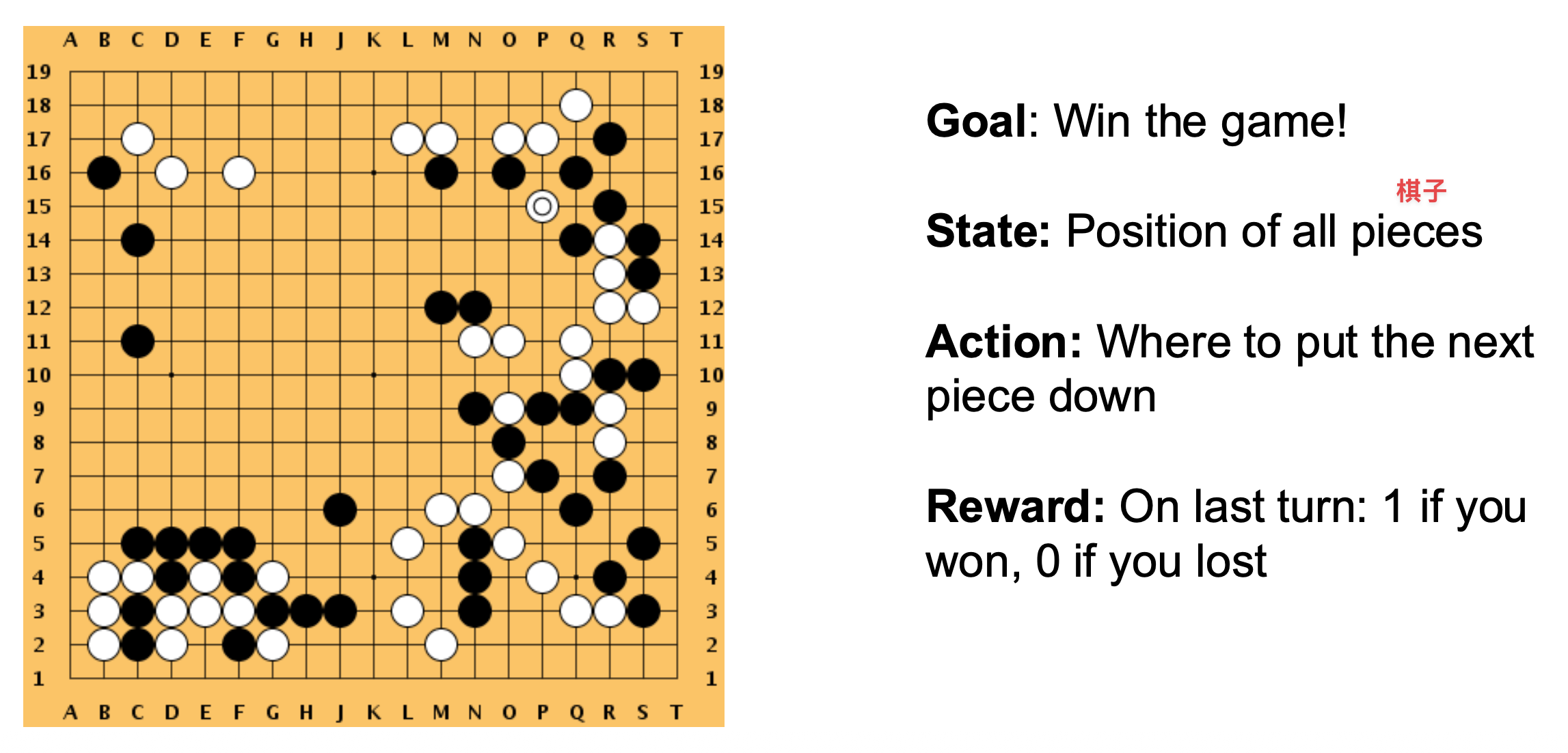
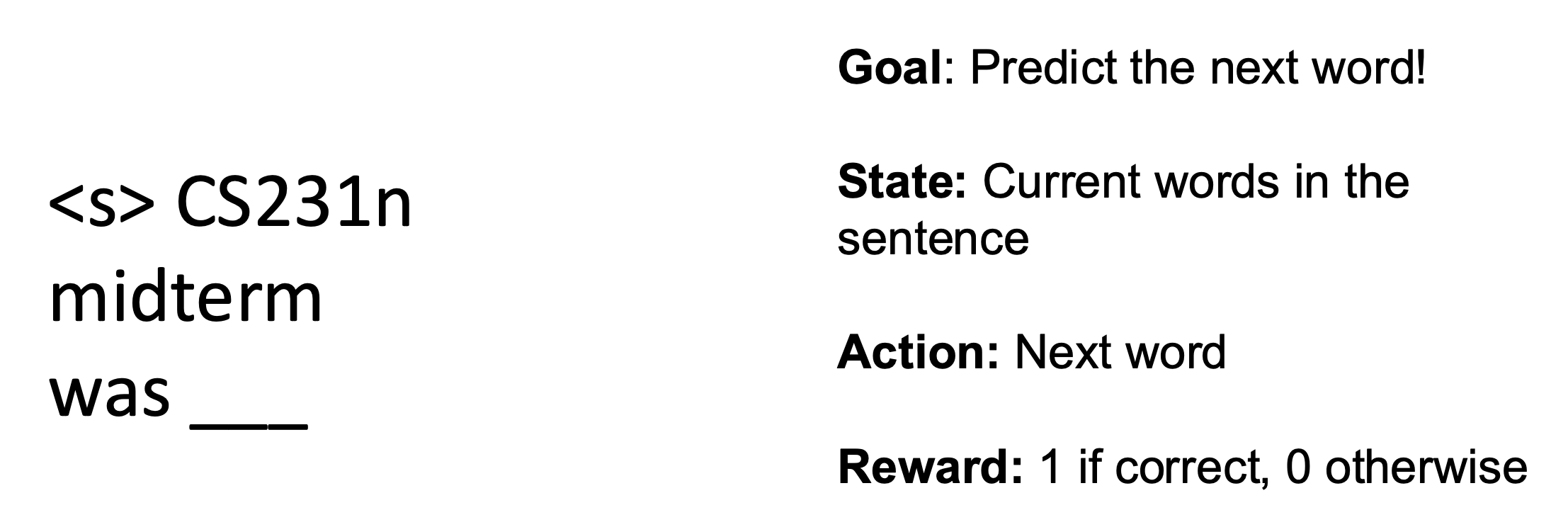
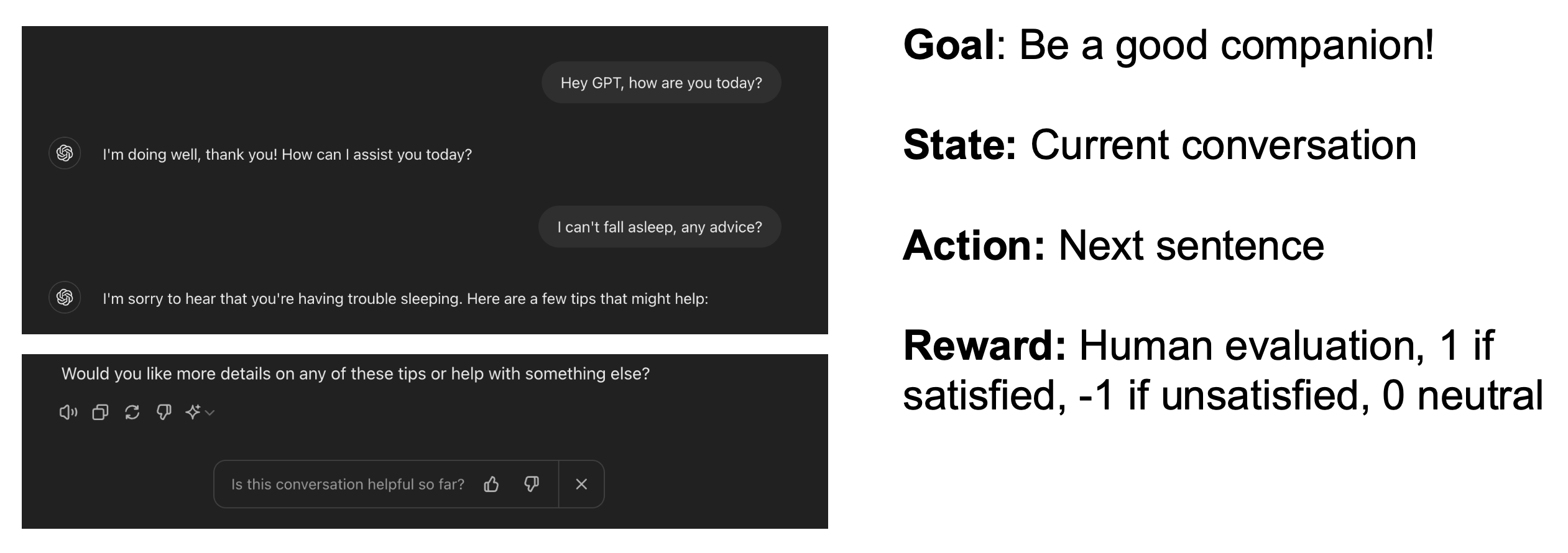
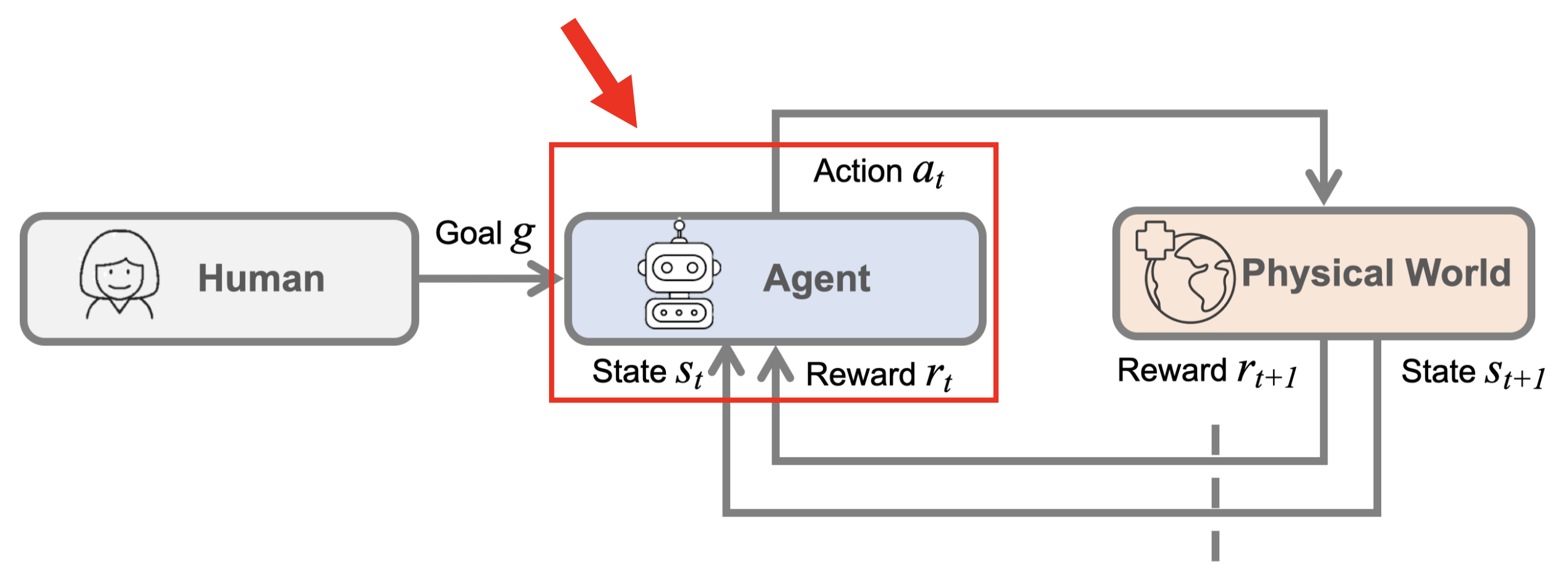
下图展示了机器人学习问题的整个过程和形式化表述:
例子

Robot Perception⚓︎
机器人的感知(perception) 是指让机器人理解非结构化的现实世界,对应上面流程图中的状态 \(s_t\)。
- 机器人从环境中获得的观察结果只包含关于物体和场景的不完整的知识
- 不完美的行动可能导致失败
- 环境是动态变化的,并且其他智能体的存在也会影响到环境
机器人的感知系统应当应对上述所有变化,因此我们会为机器人添加尽可能多的传感器(sensors),考虑多样的感觉,从而理解和世界的交互。

相比一般的计算机视觉,机器人视觉(robot vision) 具有以下特点:
- 具身(embodied):机器人具有实体,能够直接体验世界;它们的行为是世界动态的一部分,并且它们对自身感知有即时的反馈
- 主动(active):机器人是主动的感知者;它知道为什么想要感知,并选择要感知的内容,以及如何、何时何地实现这种感知
- 环境定位(environment situated):机器人位于世界之中;它们不处理抽象描述,而是直接与影响系统行为的“此时此地”("here" and "now") 打交道
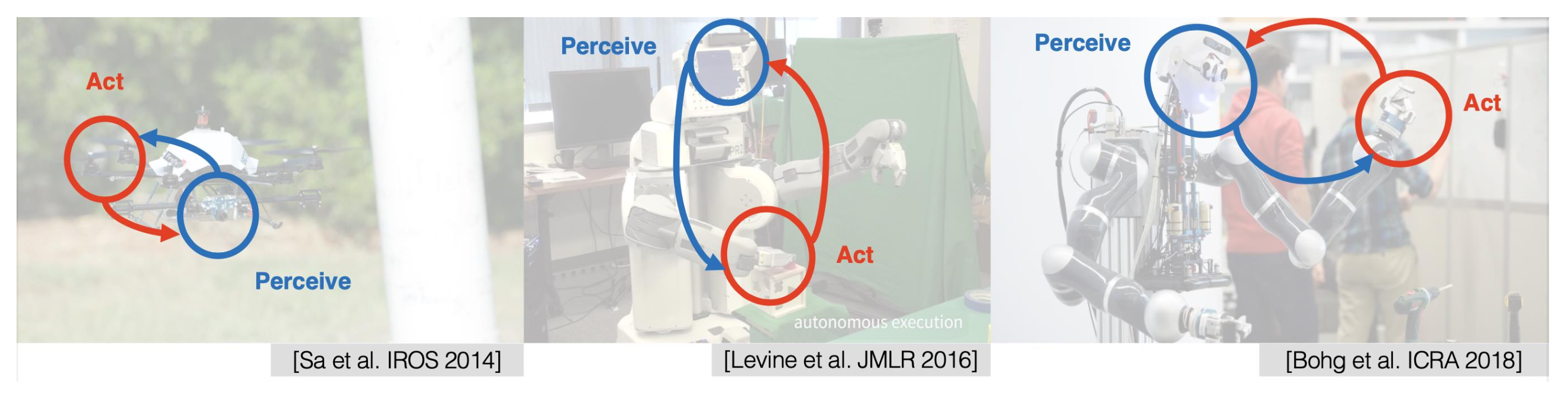
机器人学习中的一个关键挑战是闭合感知 - 行动循环(perception-action loop)。
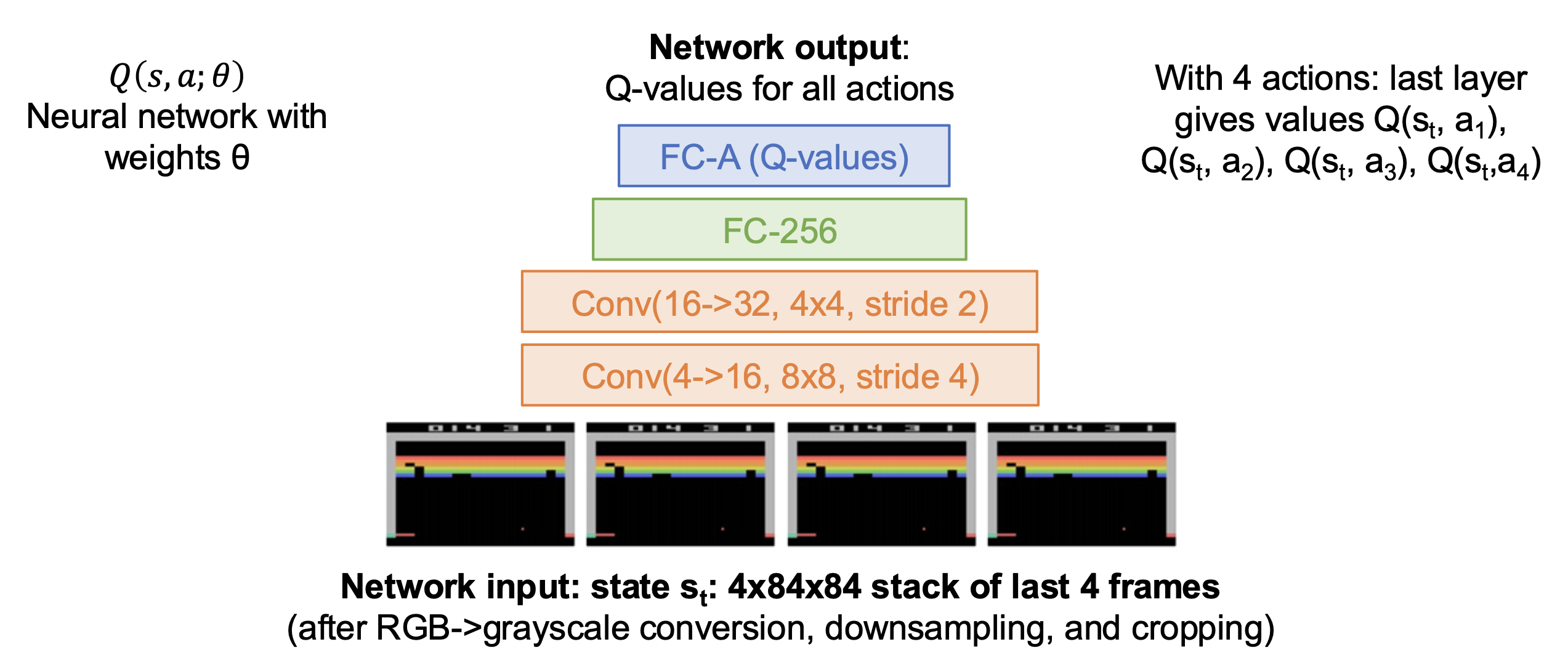
Reinforcement Learning⚓︎
我们采用强化学习(reinforcement learning, RL) 的方式训练与环境交互的智能体,并使其学会最大化奖励(试错(trial and error)
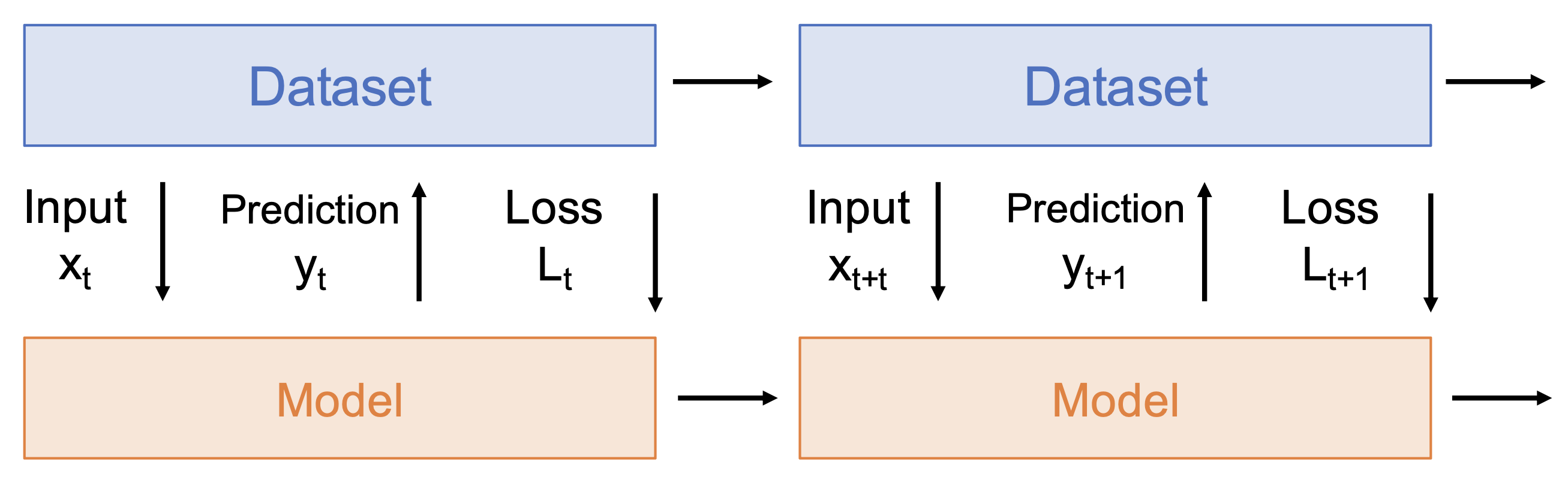
看起来强化学习和监督学习是十分相似的,但实际上两者还是有很大差异的,具体体现在以下几方面:
-
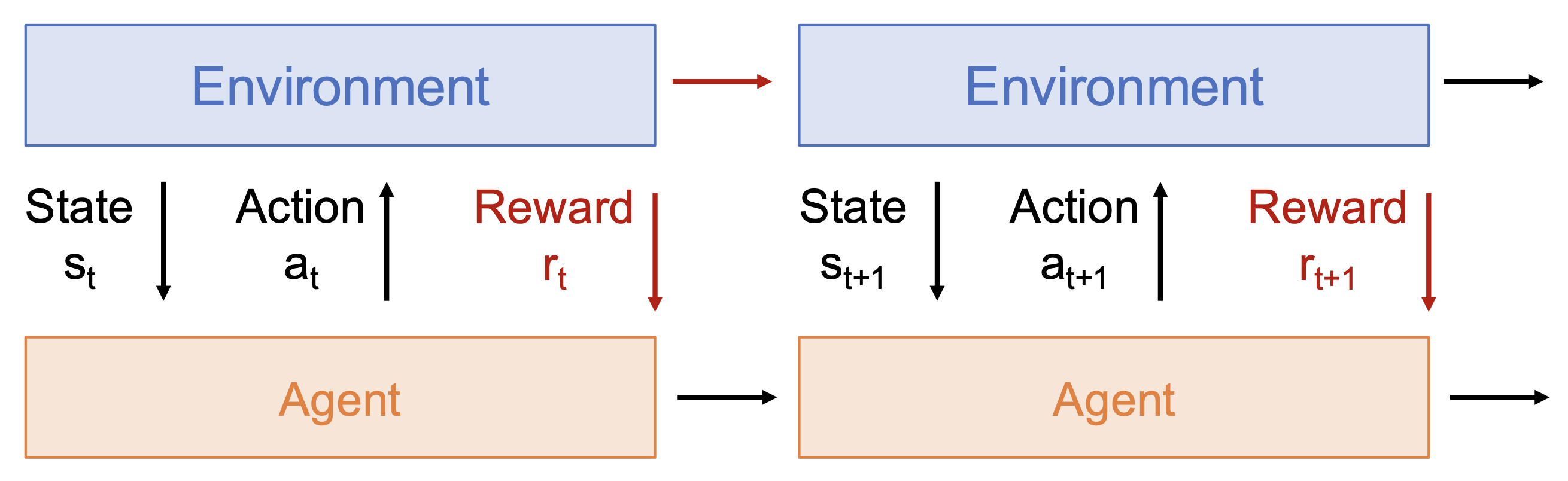
随机性(stochasticity):奖励和状态转移可能是随机的
-
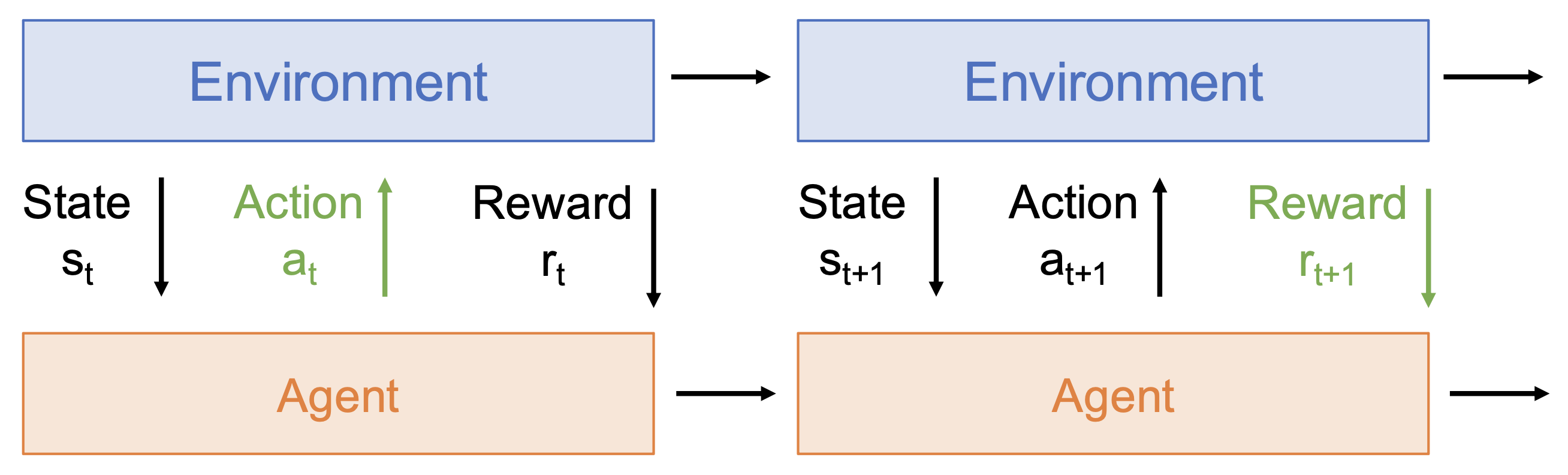
信用分配(credit assignment):奖励 \(r_t\) 并不直接取决于行动 \(a_t\)
-
不可微分(nondifferentiable):无法计算 \(d r_t / d a_t\),因而无法反向传播
-
非平稳(nonstationary):智能体所经历的取决于它的行动
例子

(无模型 (model-free))强化学习的问题
- 从试错中学习需要大量的交互
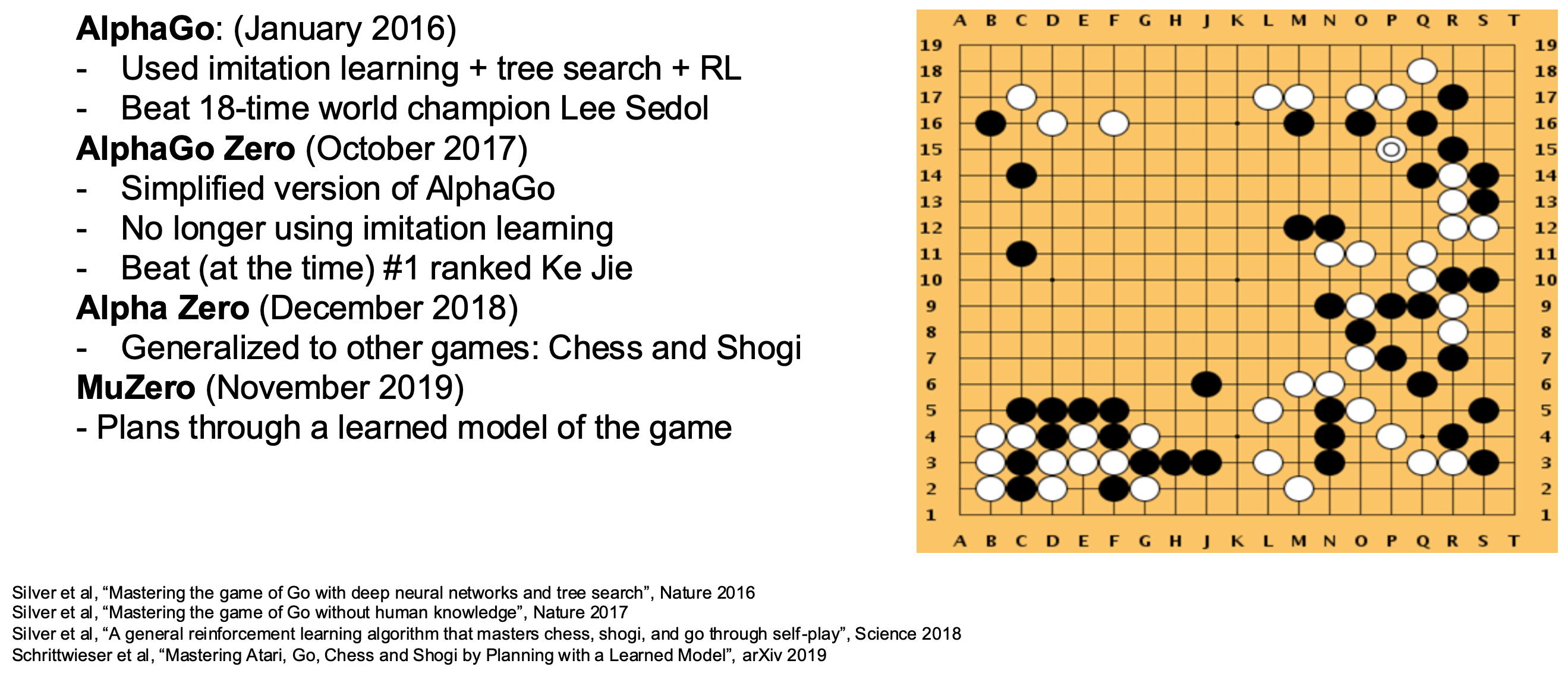
- 例子:训练 AlphoGo Zero 时,超级计算机花费 40 天学习了 3000 年的人类知识
- 对安全的担忧
- 有限的可解释性 (interpretability)
- 人类维持着对世界的直观模型
- 广泛适用
- 样本效率高
Model Learning & Model-Based Planning⚓︎
模型学习(model learning) 和基于模型的规划(model-based planning) 是指学习世界状态转移函数 \(P(s_{t+1} | s_t, a_t)\),然后通过模型进行规划以做出决策。
具体过程为(模型可能不够精确
- 执行第一次行动
- 获得新状态
- 使用梯度下降重新优化行动序列
关键在于支持并行采样 / 梯度下降的 GPU。
一个关键问题是:\(s_t\) 的形式应当是什么样的?多年来,关于这一问题有多种探索,下面列举其中一些具有代表性的研究:
例子
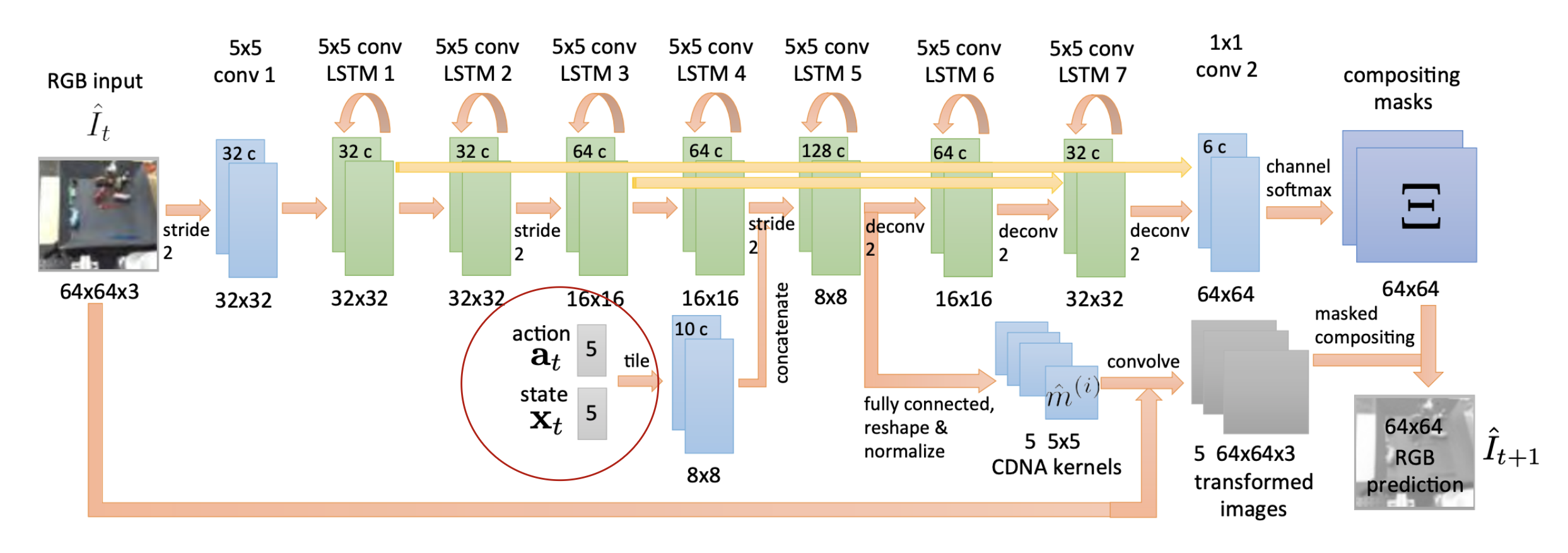
仅使用 2D 图像作为状态表征,尝试学习像素的动态变化。
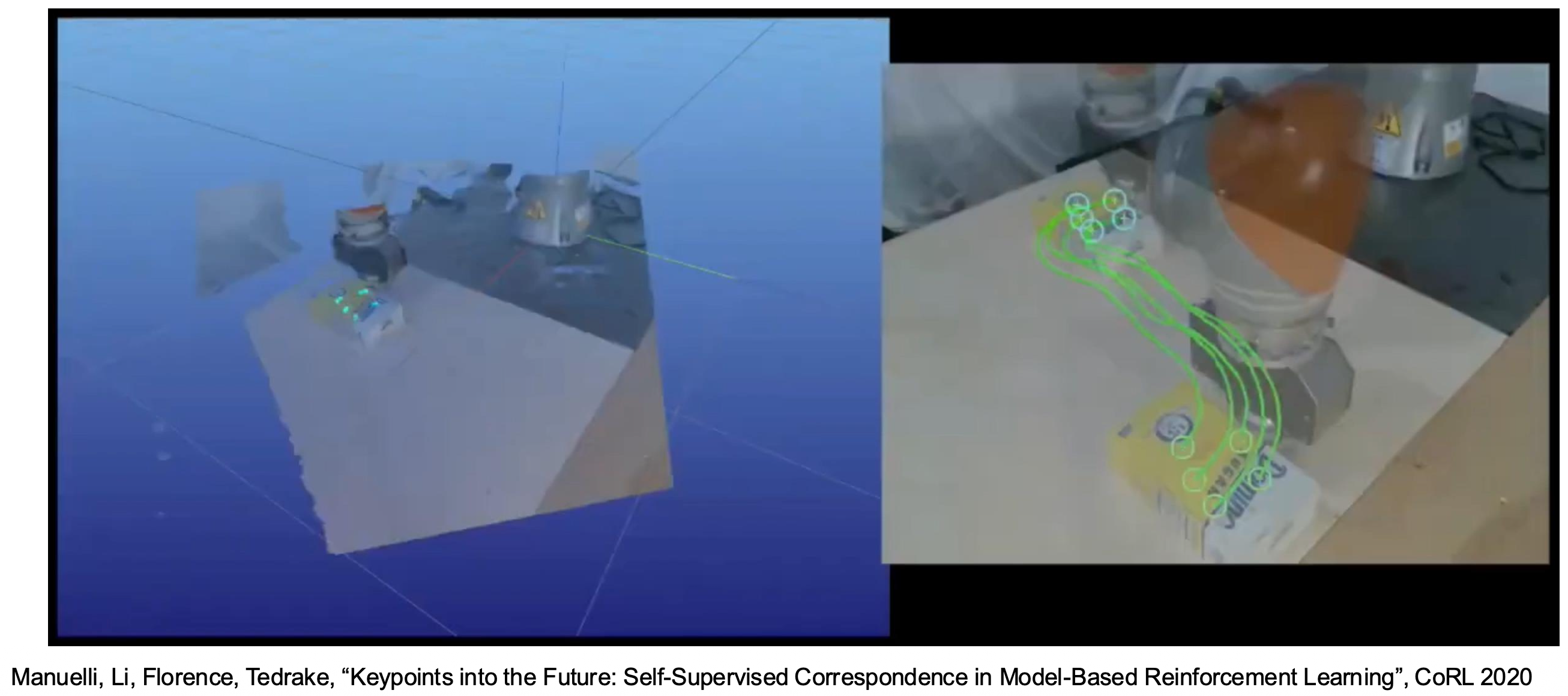
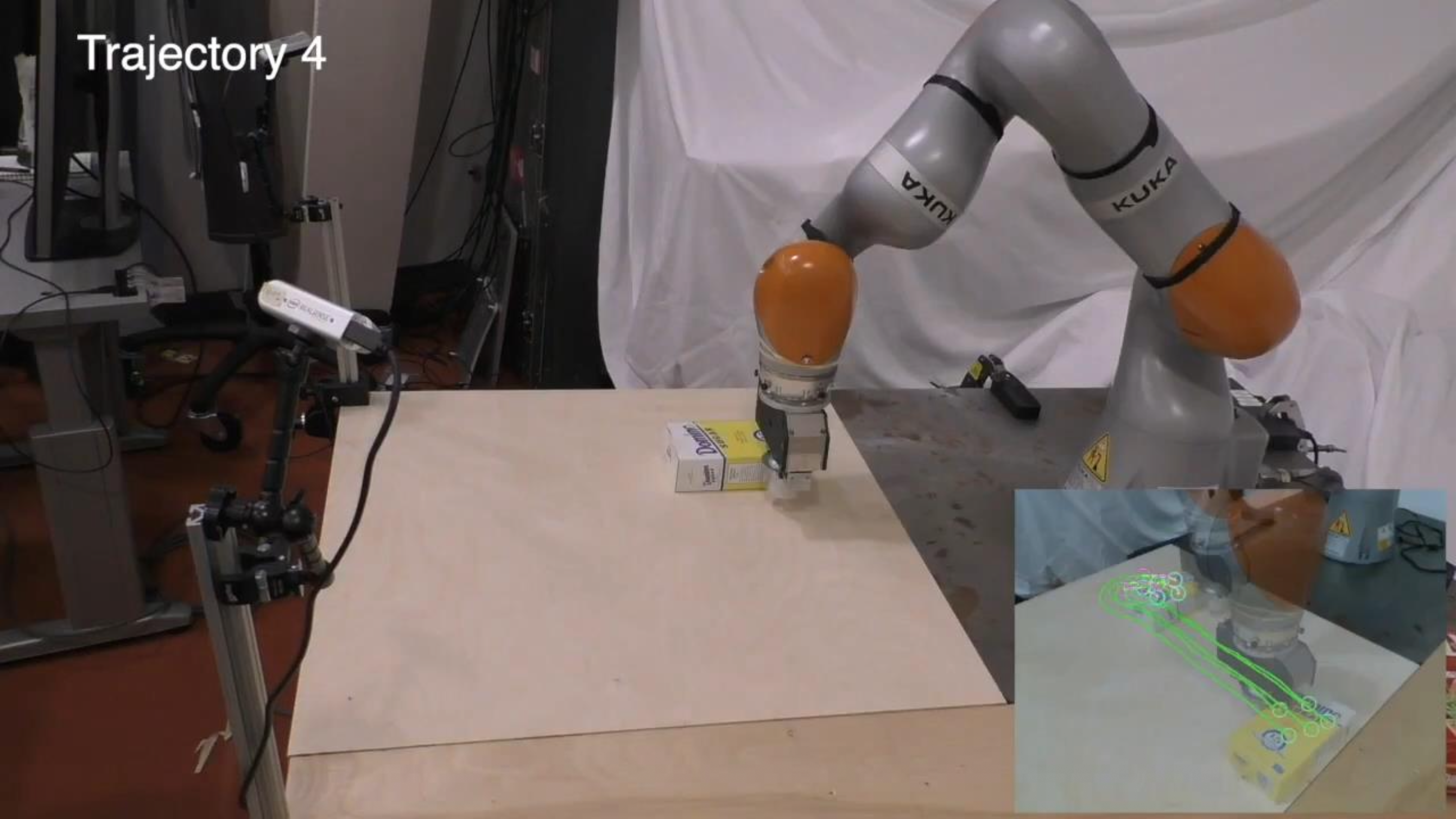
跟踪物体关键点在三维空间中的运动,并且基于这些关键点为机器人的动作建模。这样就可以让机器人基于这种前向预测模型来规划自身的行为。
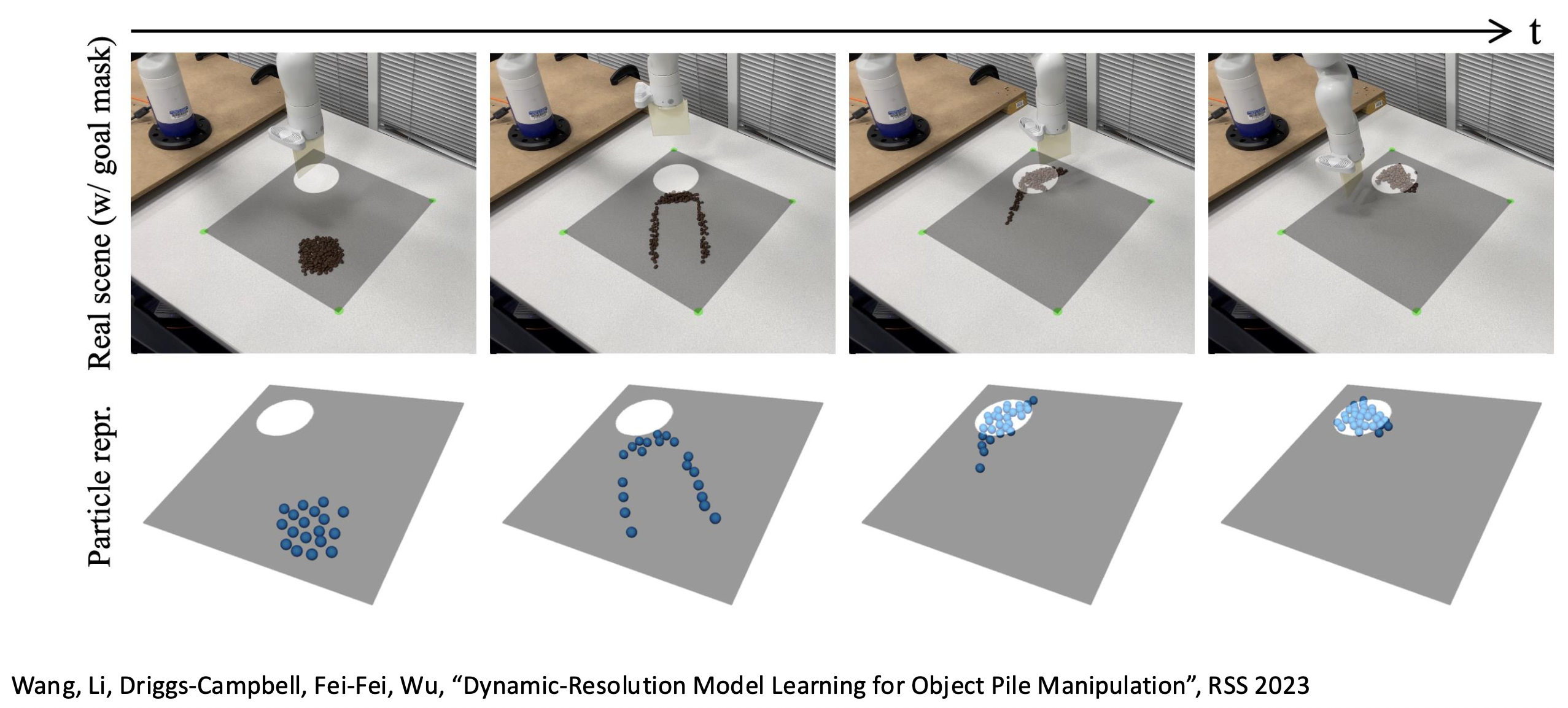
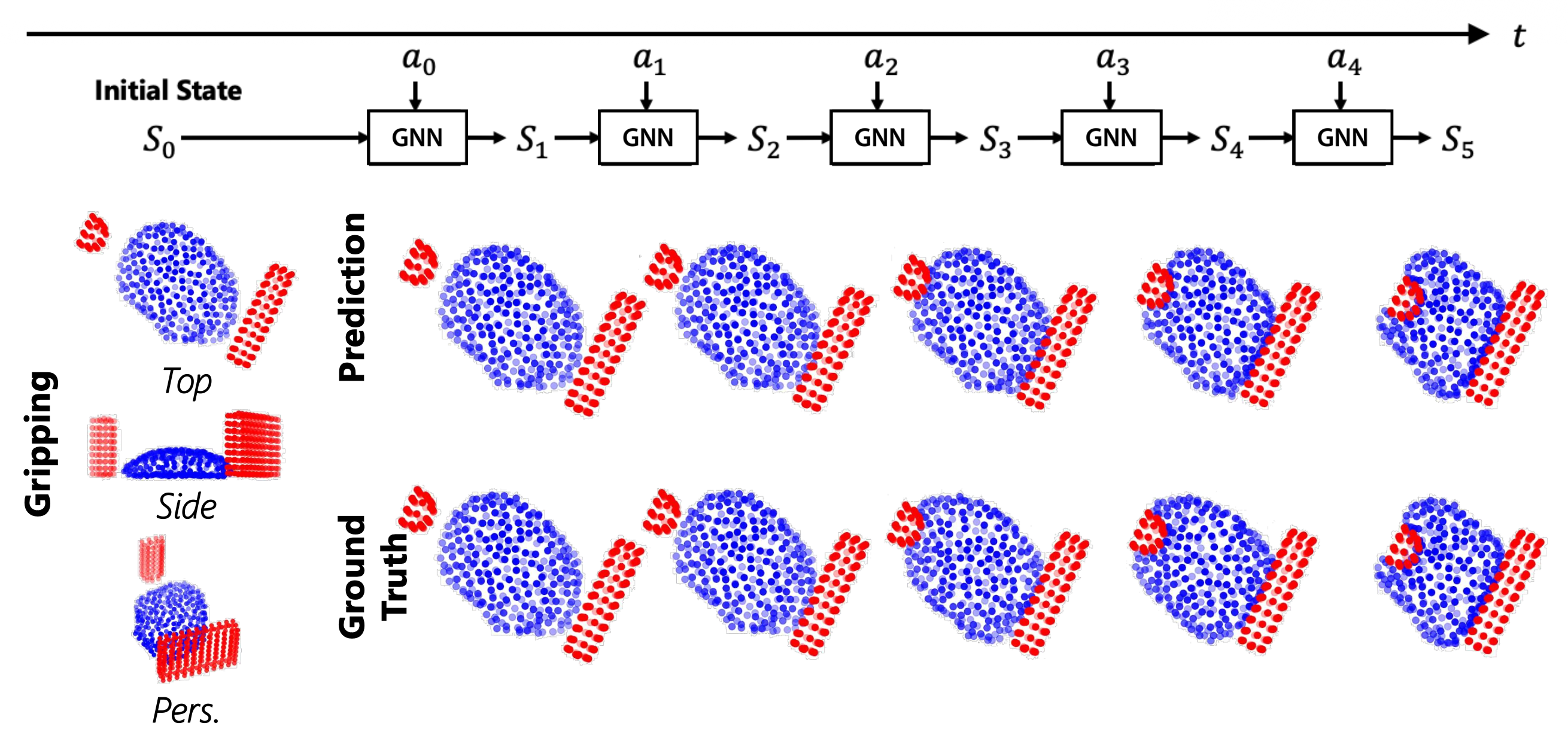
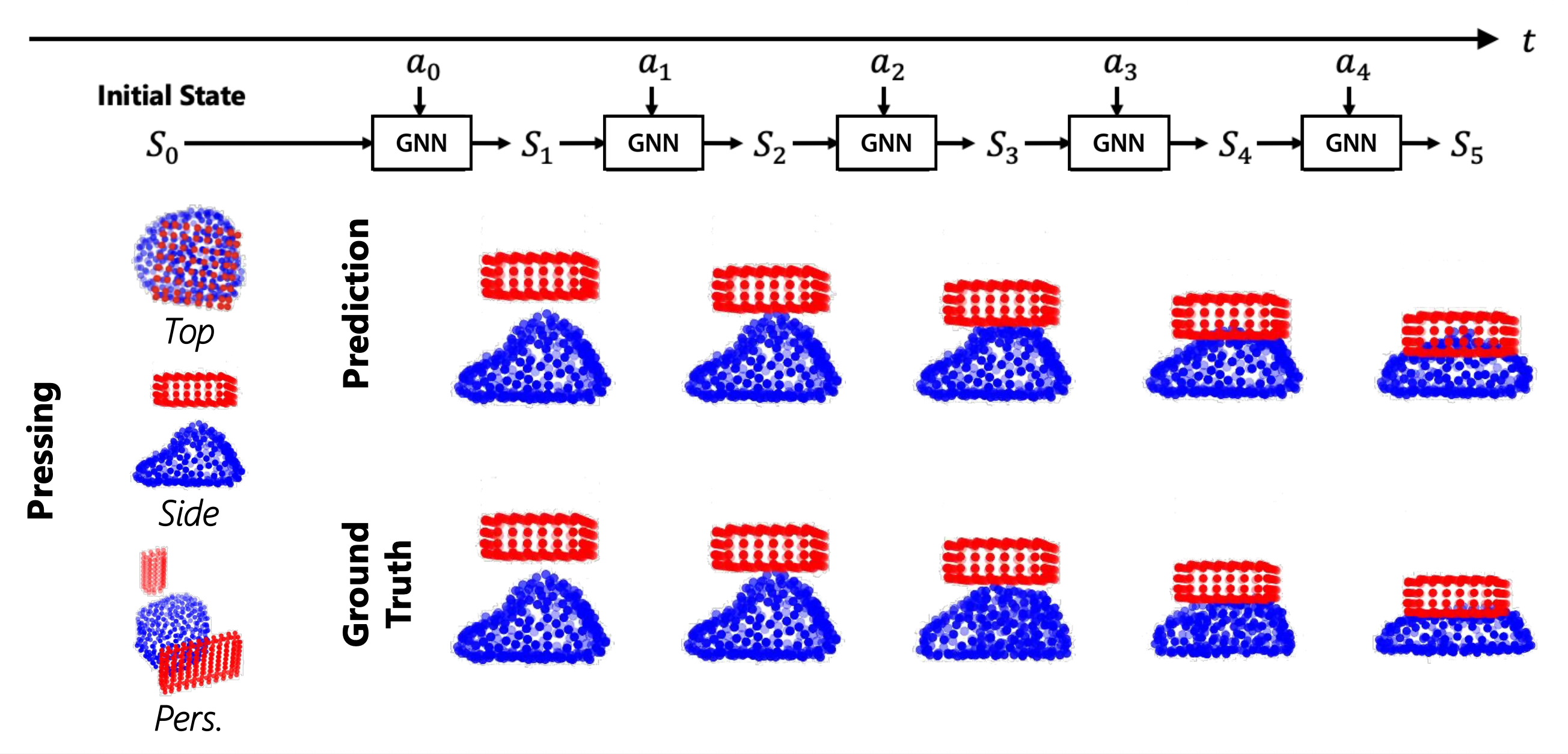
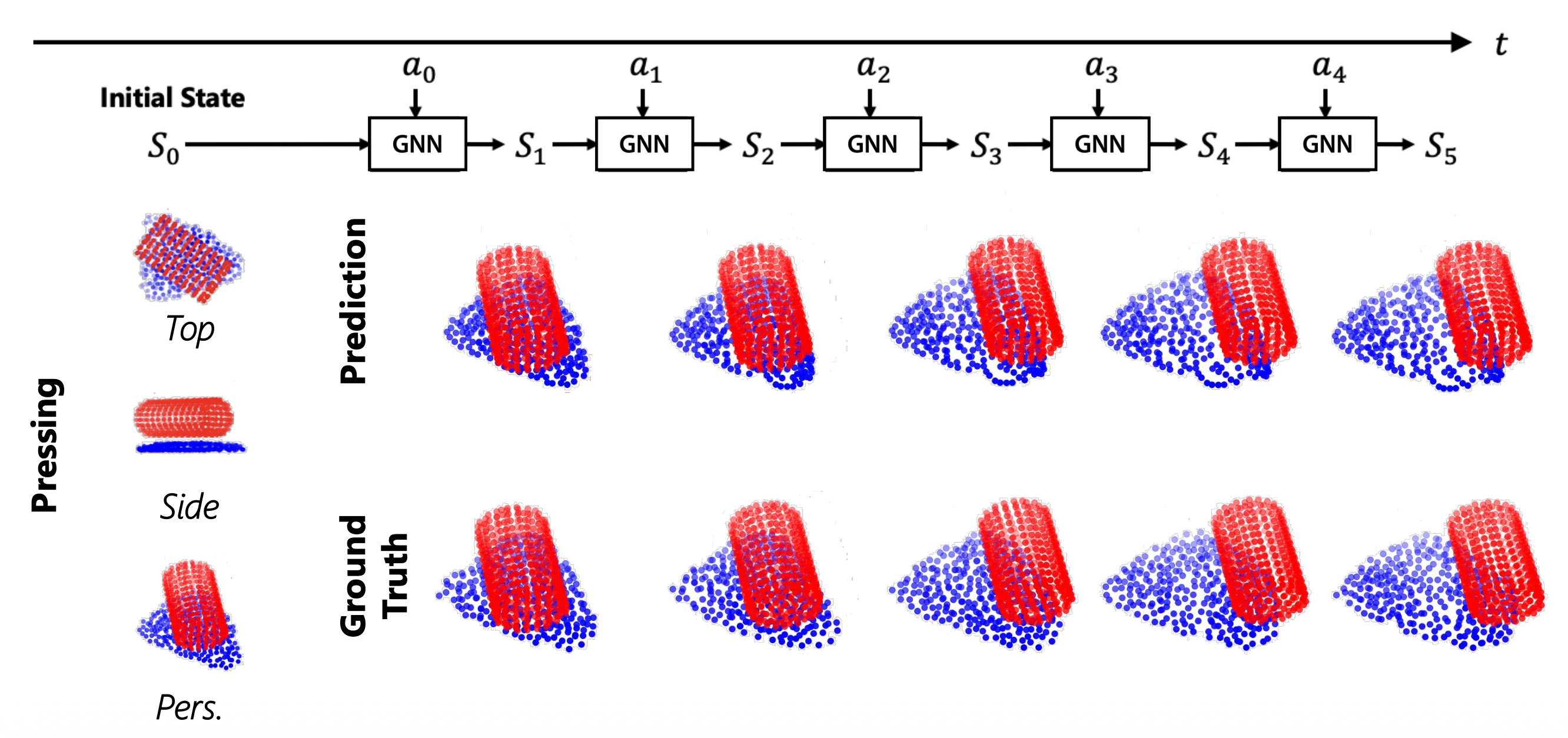
用一组粒子表示物体,尝试预测当应用特定行动时,粒子将会如何移动。
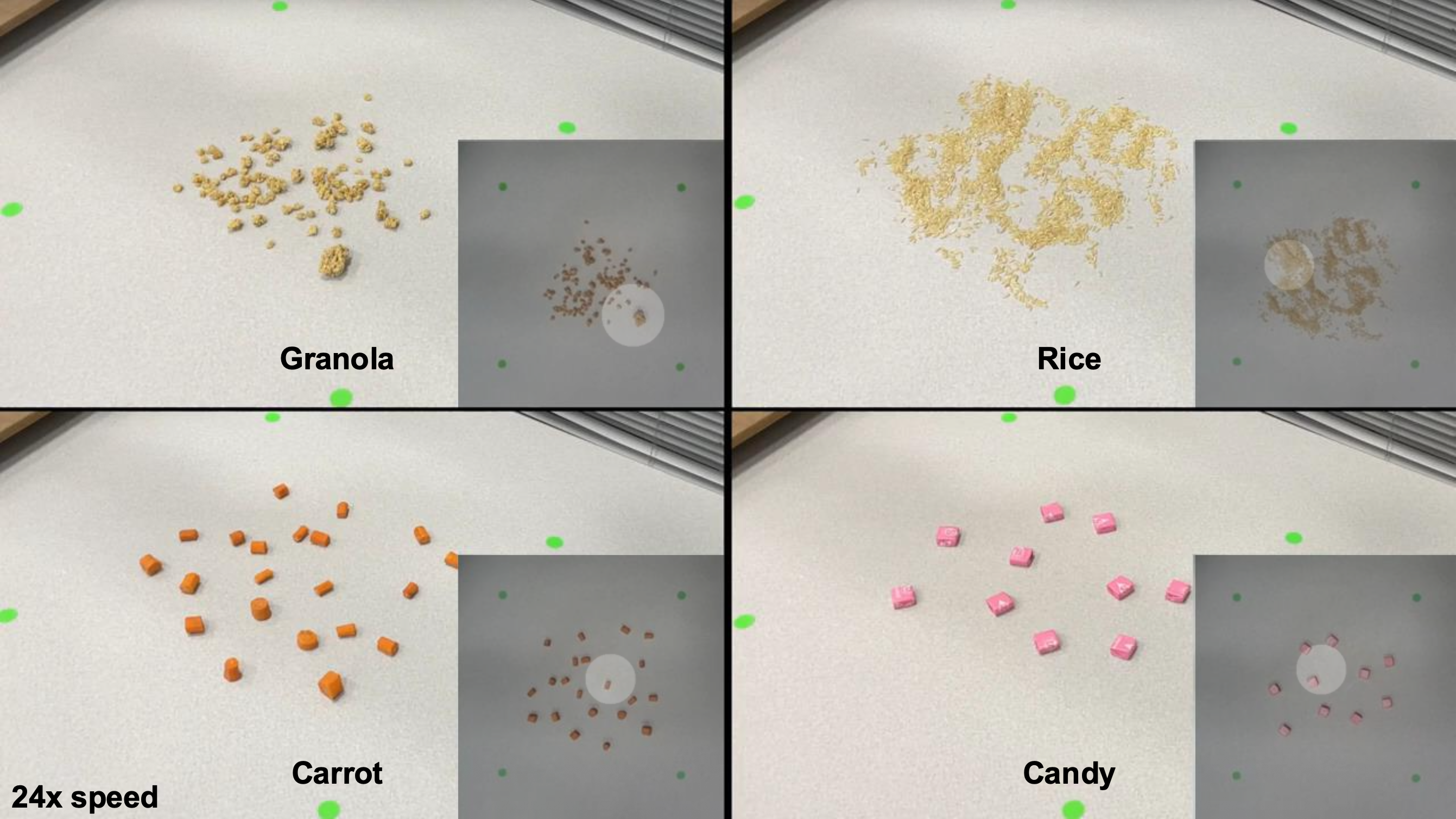
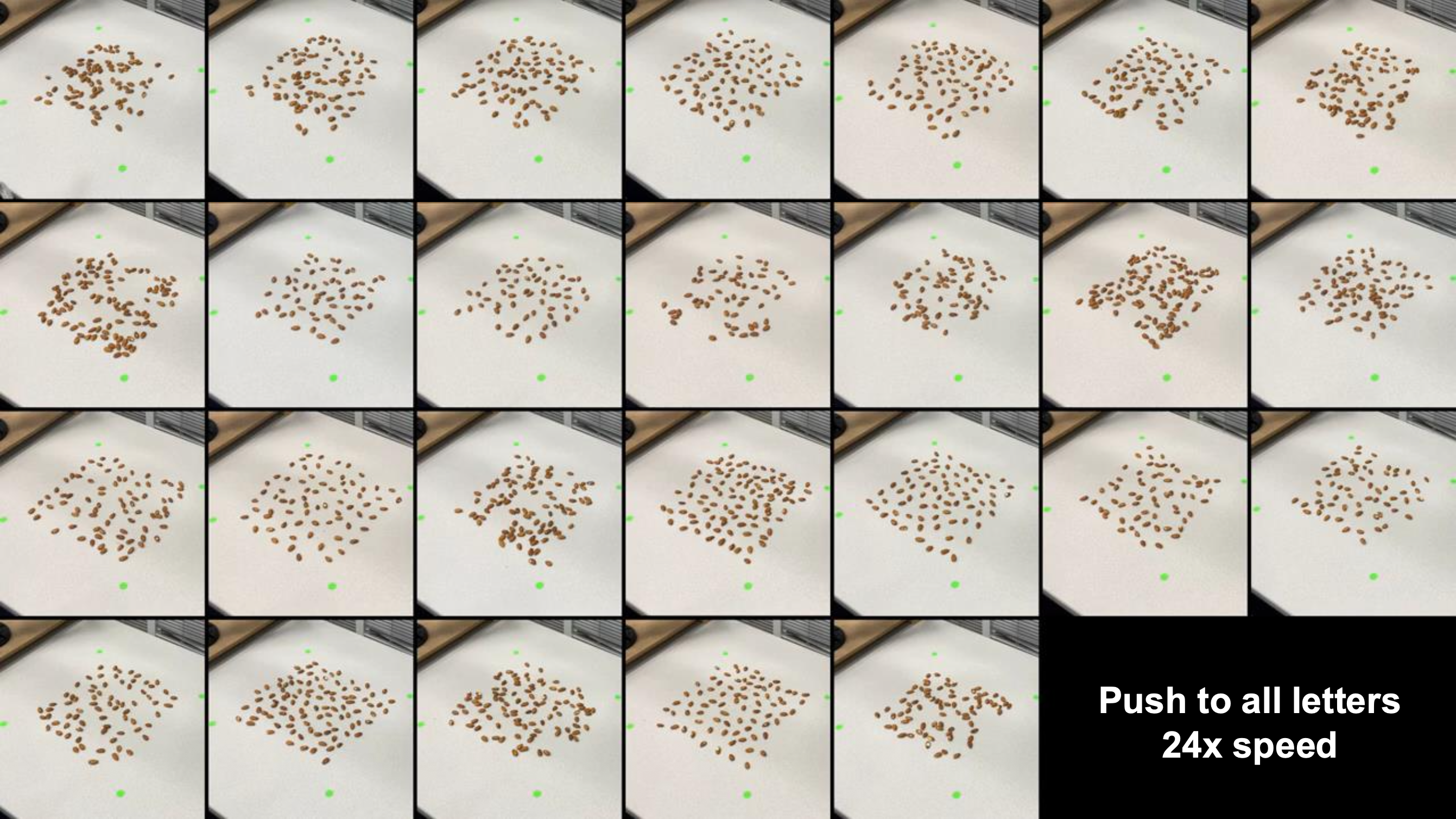
处理不同大小的颗粒状物体。
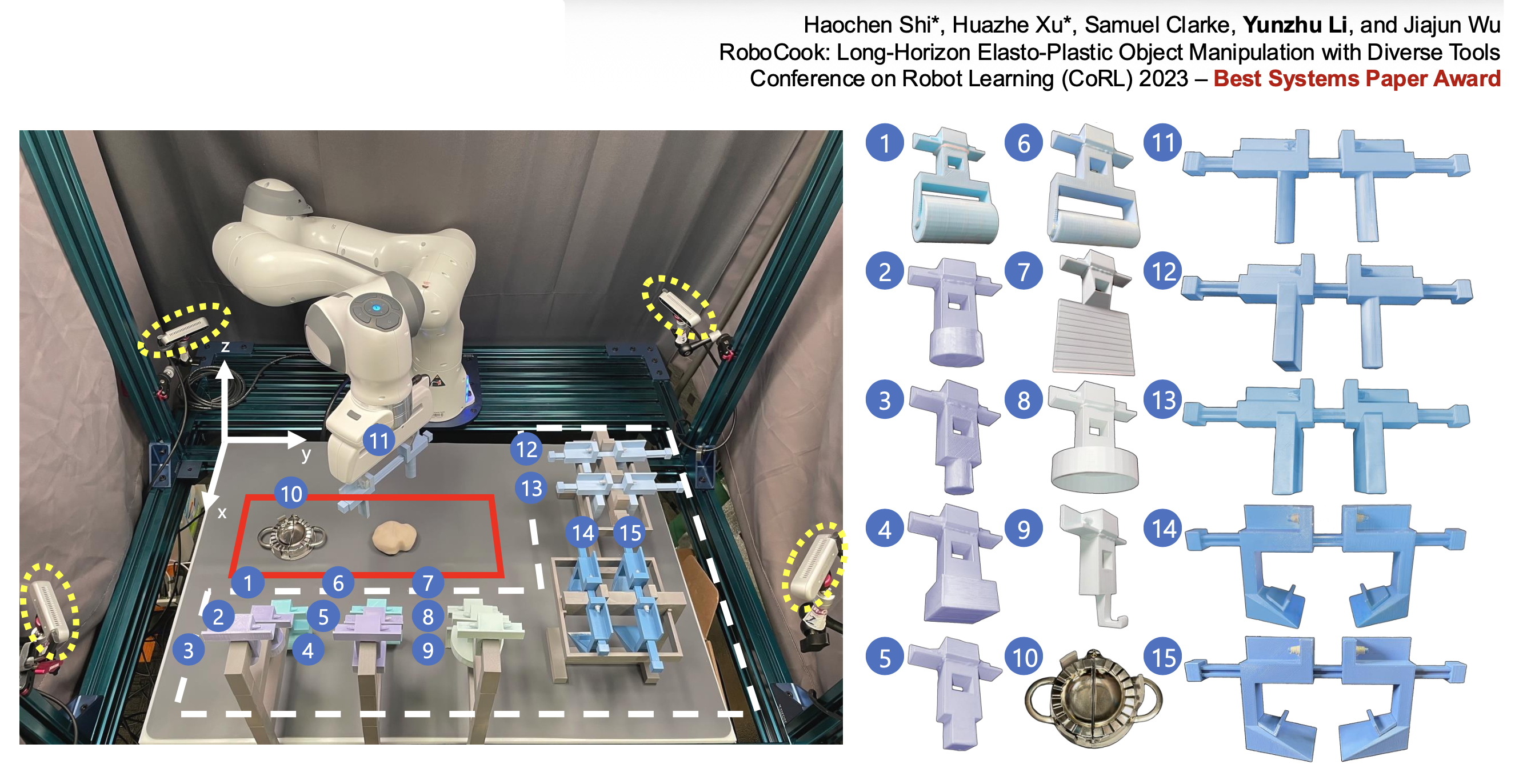
包饺子机器人:
Imitation Learning⚓︎
模仿学习(imitation learning):从演示数据集中进行监督学习。
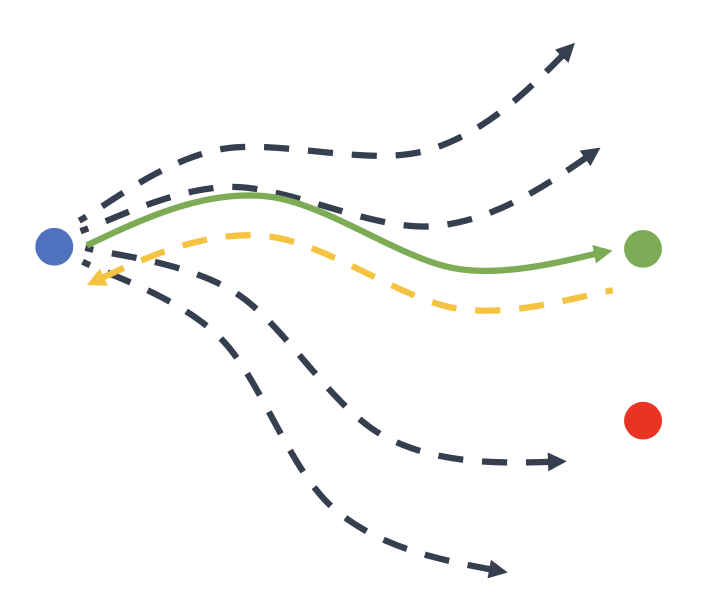
行为克隆(behavior cloning, BC):
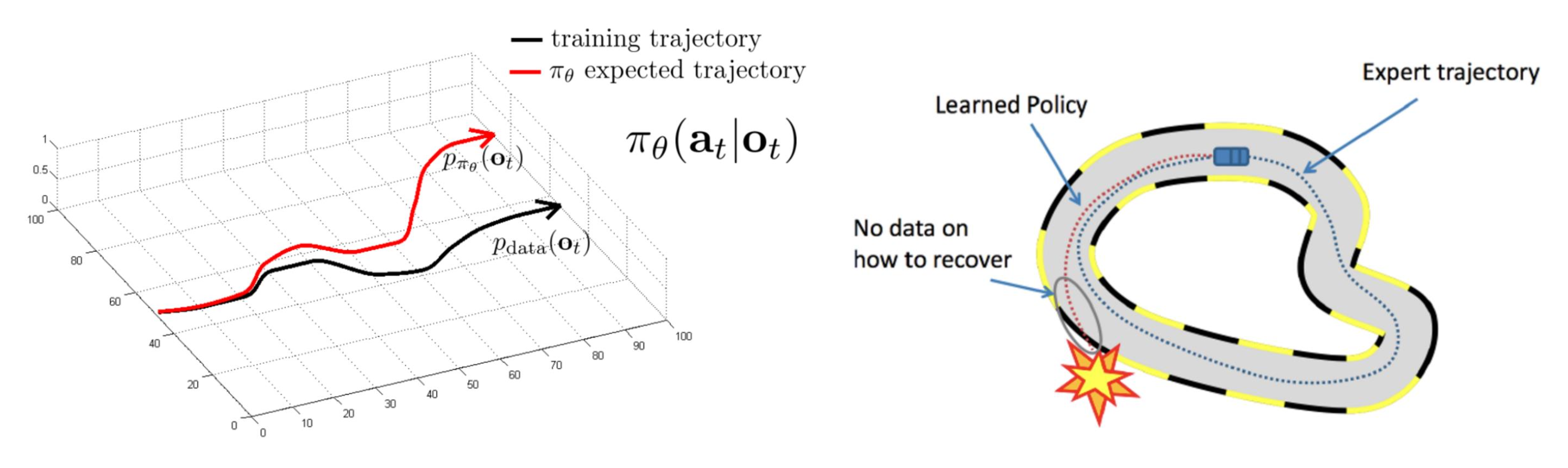
BC 的一个关键问题是级联错误 (cascading error):一开始犯的小错误会导致之后输出的轨迹和演示轨迹有很大的偏离。
专家演示的迭代收集:
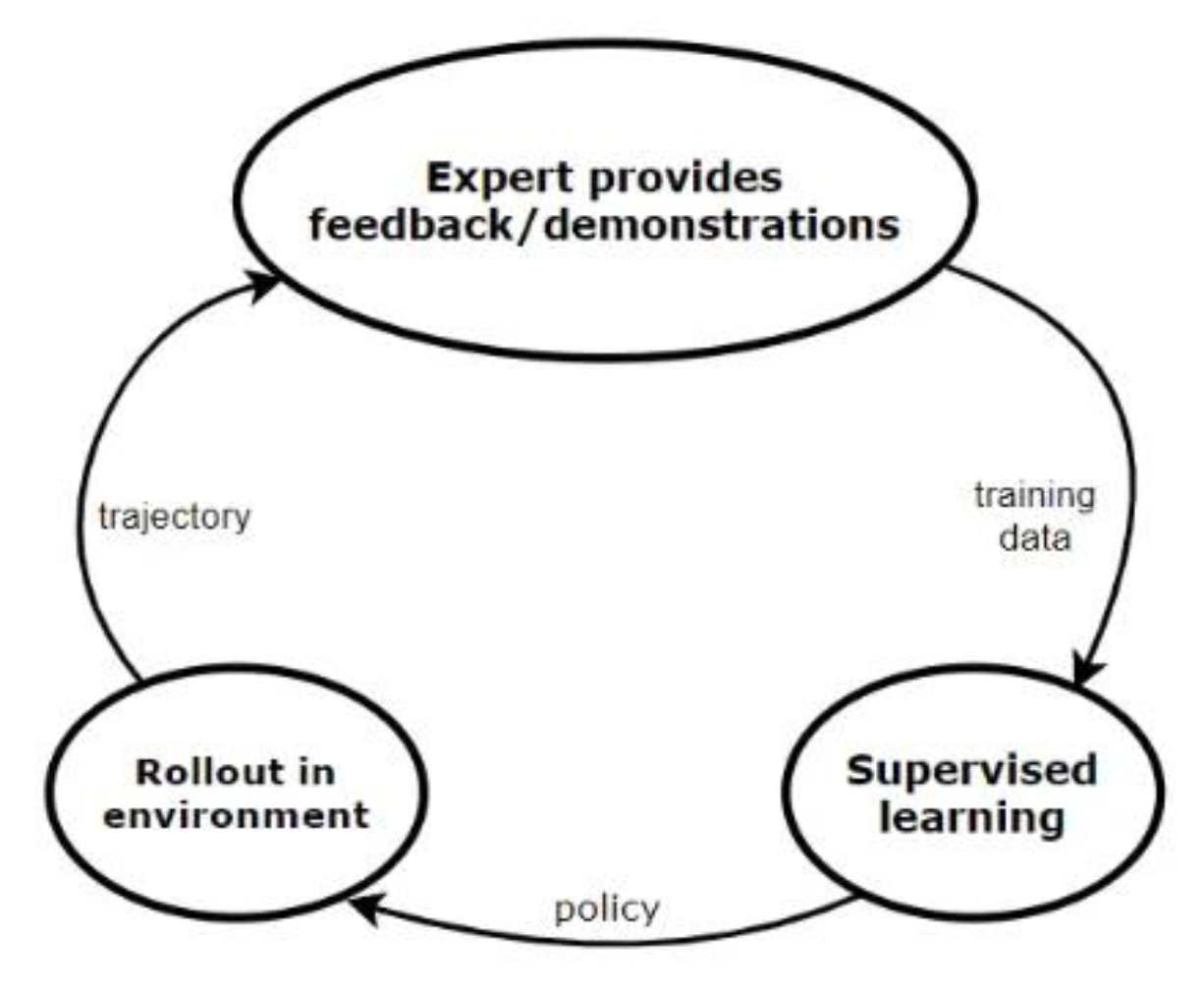
通过上述生命周期,数据集中不仅包含初始演示,还包含那些纠错行为(重回正轨
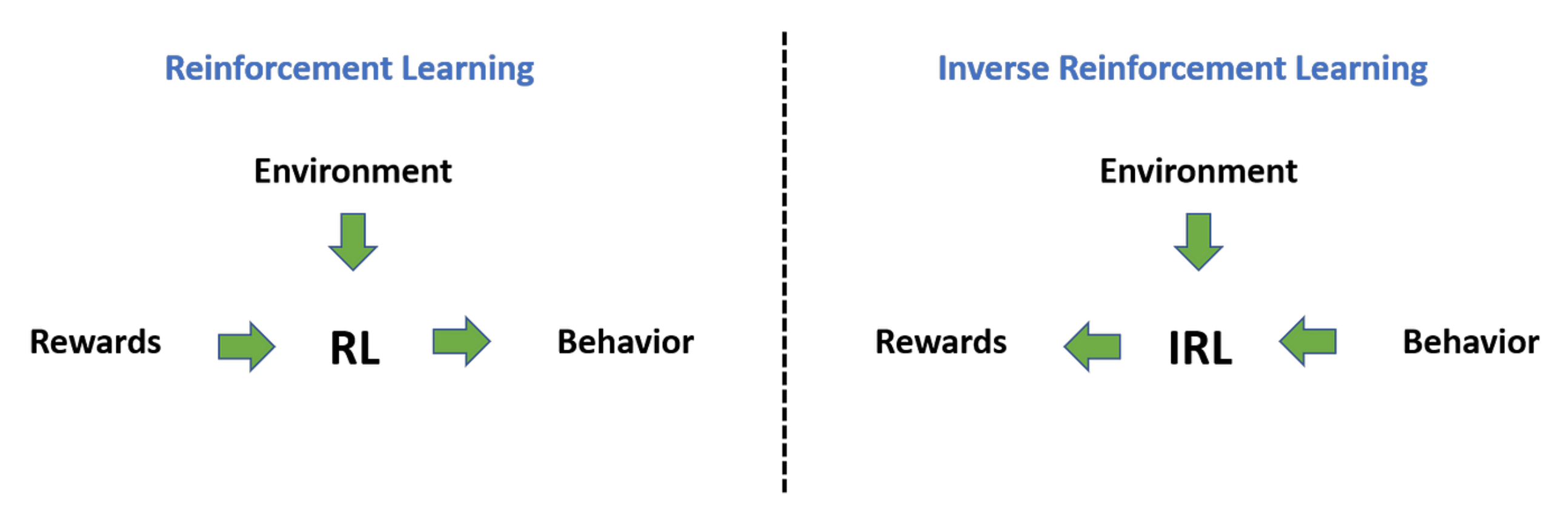
逆强化学习(inverse reinforcement learning, IRL):从演示中总结奖励,然后将这个奖励用在常规的强化学习中来学习算法。
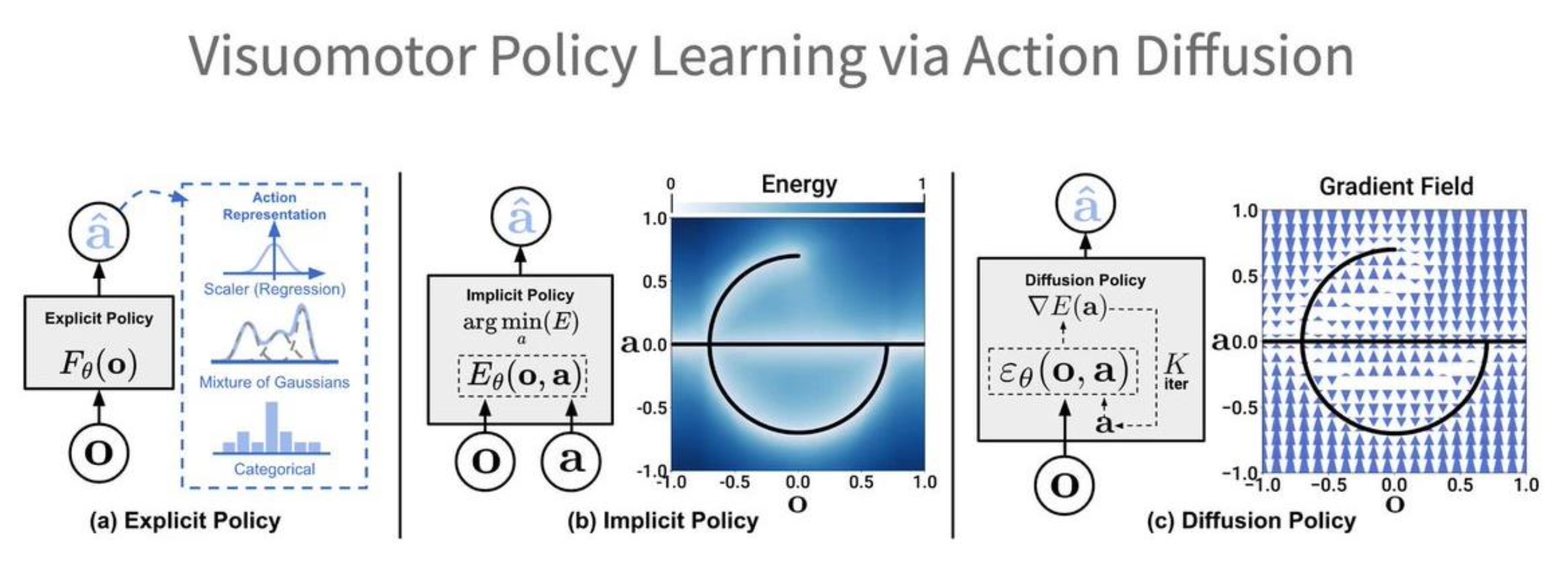
隐式行为克隆(implicit behavior cloning, IBC):不会学习显式的策略,而是直接建立从观察到行动的映射(灵感来源于基于能量的模型
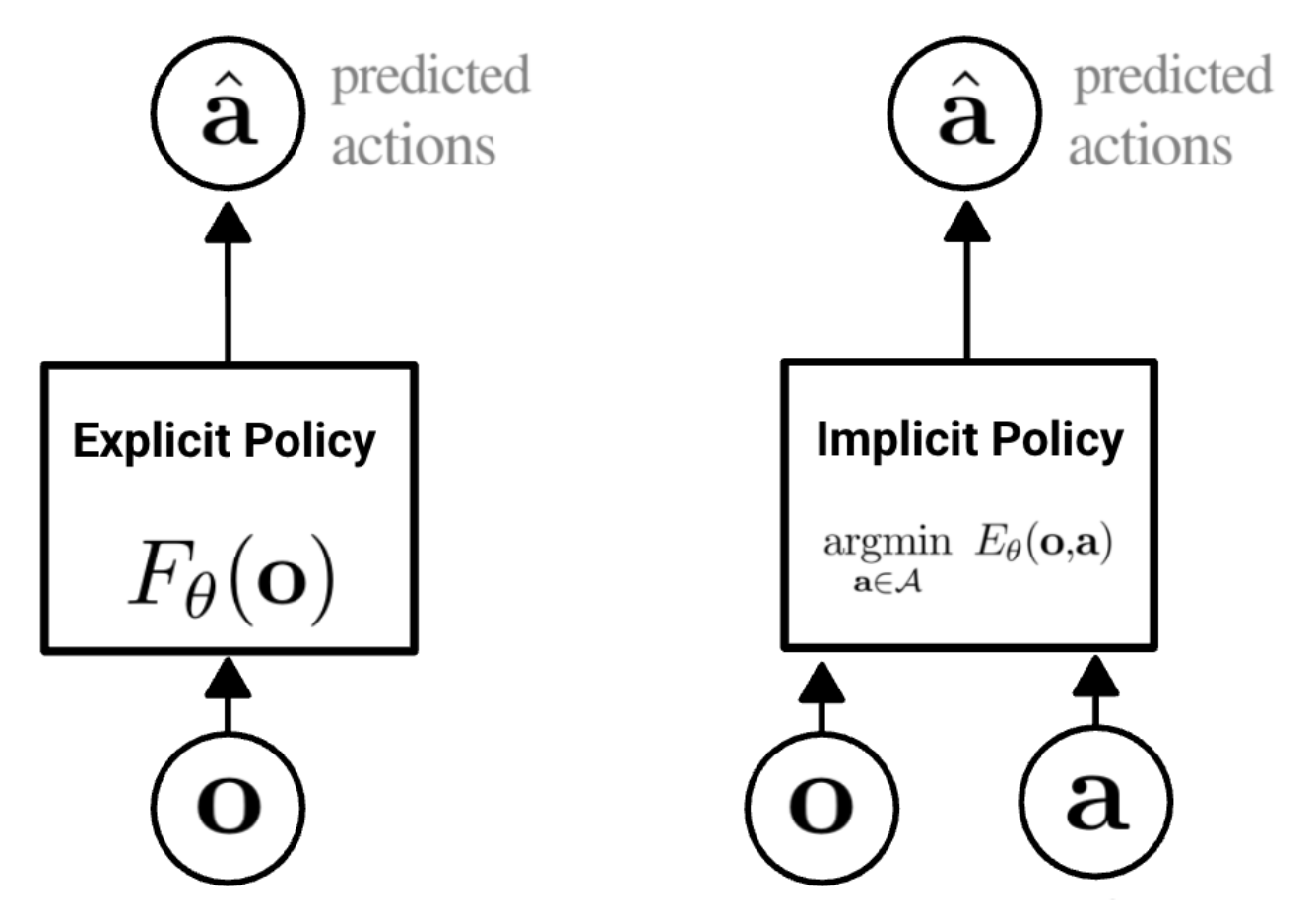
扩散策略(diffusion policies):将扩散模型作为策略函数,使得智能体继承扩散模型的优势和属性。
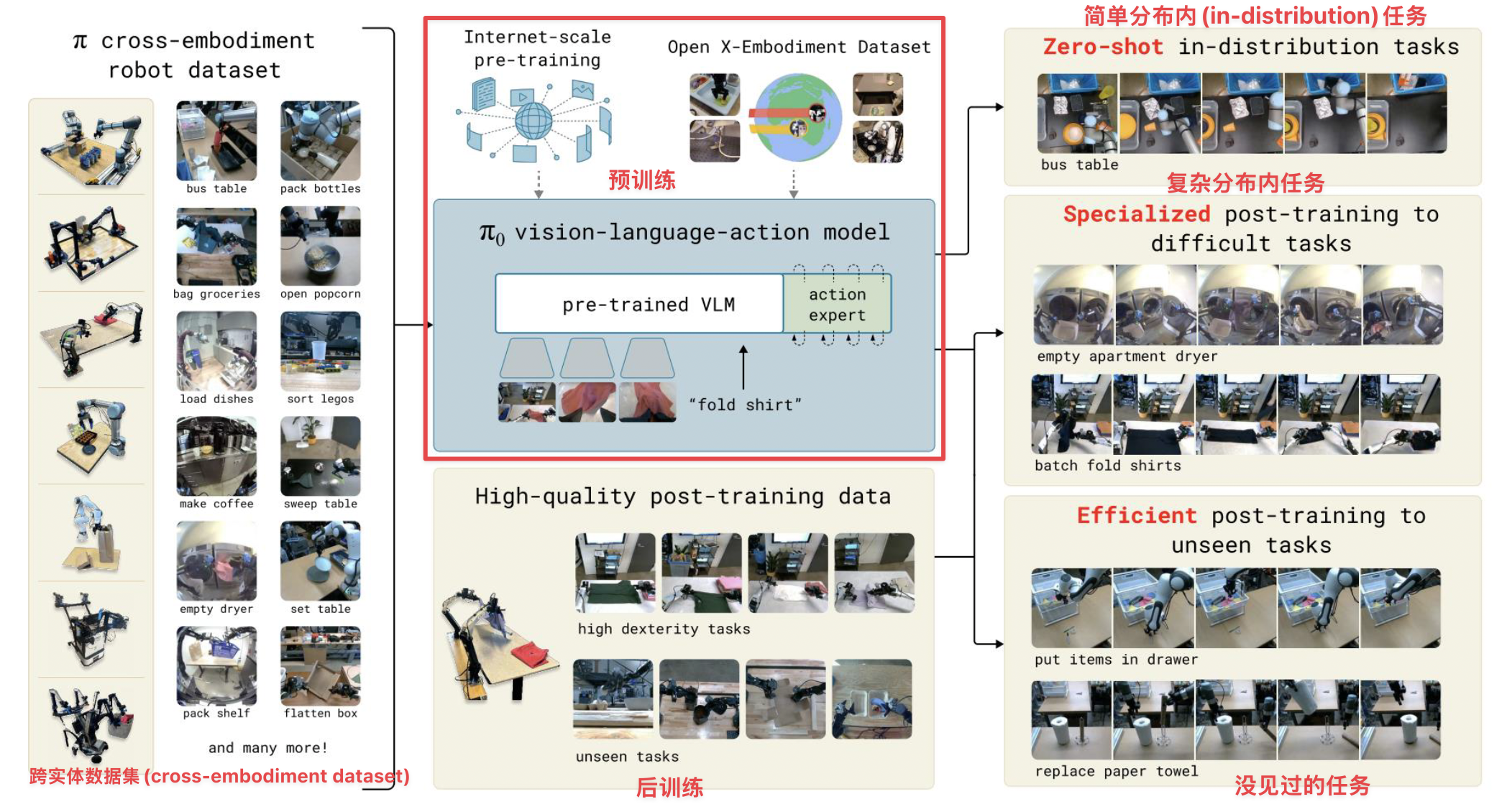
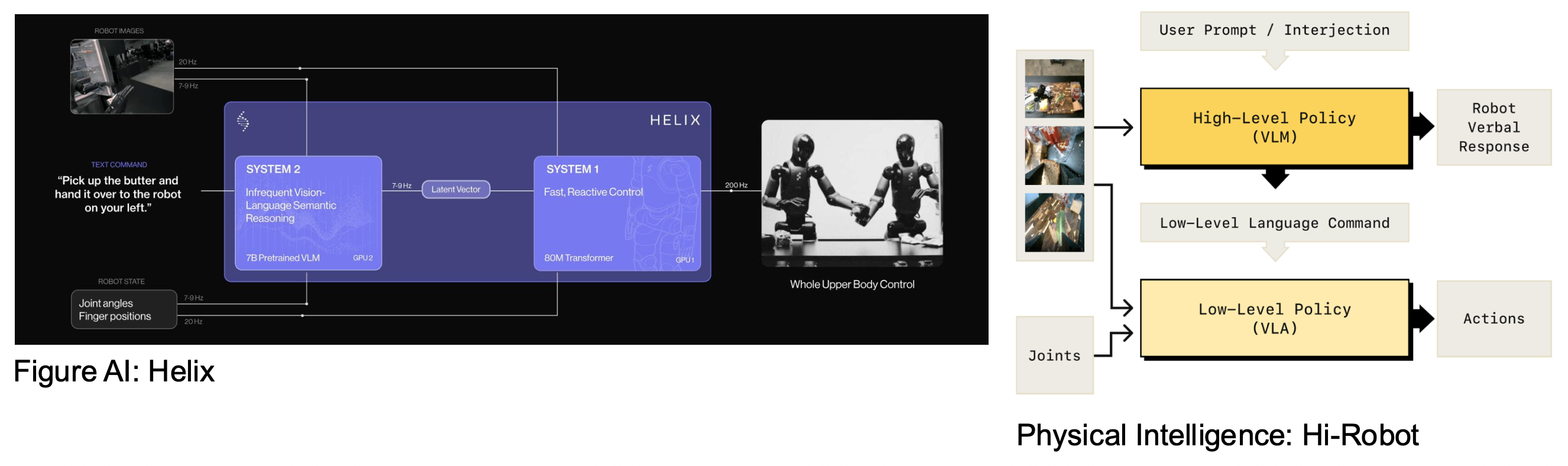
Robotic Foundation Models⚓︎
机器人基座模型(robotic foundation models) 的特点:
- 没有显式的状态 / 转移函数
- 采用将(观察 / 状态、目标)映射到行动的策略
关于当前的基座视觉 - 语言模型:
- 输出可能不够完美
- 总是能生成一些合理的东西
对应到机器人基座模型:
- 合成动作可能不是最优的
- 生成的轨迹总是优美且合理的
不同的名称:视觉 - 语言 - 行动模型 (vision-language-action models, VLAs)、大行为模型 (large behavior models, LBMs)。
发展历程:
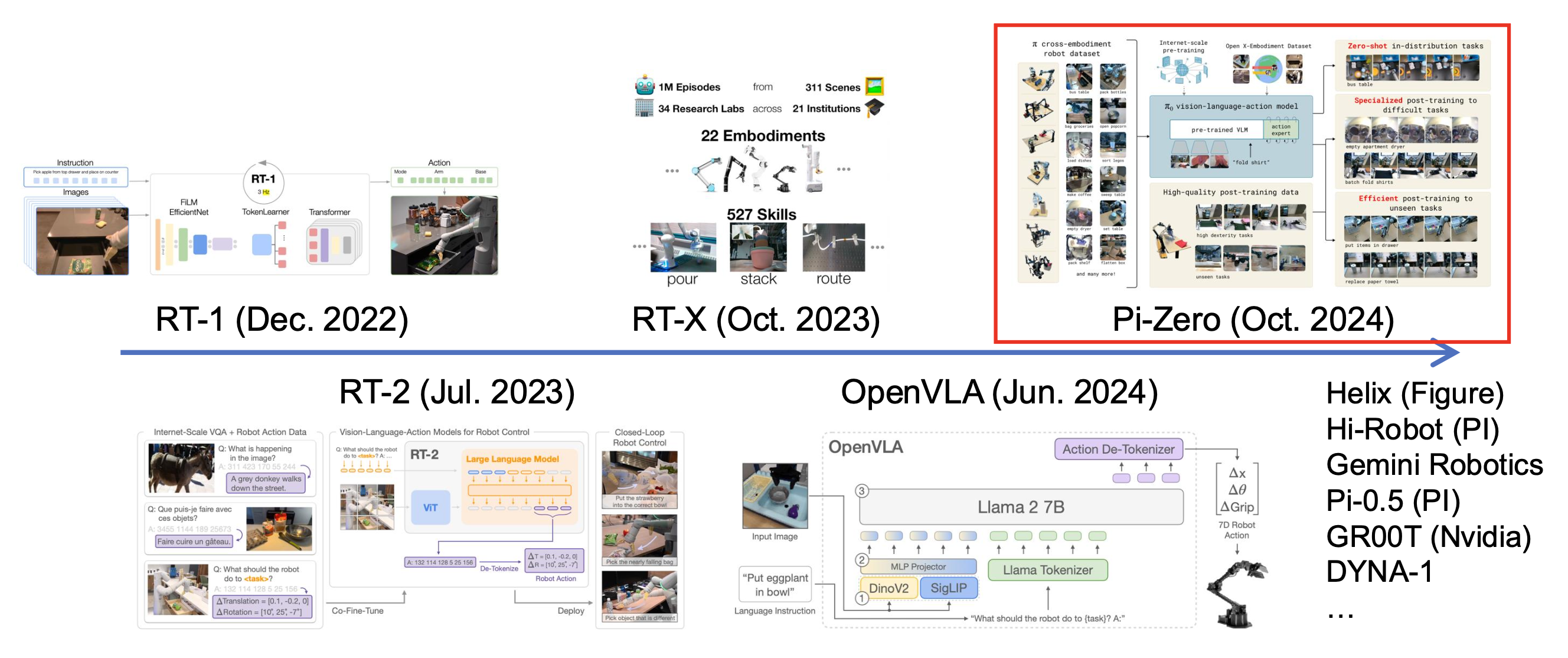
下面重点介绍 Pi-Zero(由 Physical Intelligence 开发
结果

架构图:
Remaining Challenges⚓︎
Evaluation of the Robot Learning Models⚓︎
评估(evaluation) 主要在现实世界中执行。
- 但现实实际的评估是昂贵且嘈杂的
不过也许有足够多的预算支持研究取得进展
- 训练损失和现实世界的成功率是弱相关的
- 训练目标 vs 任务特定的指标,训练 vs 测试视野
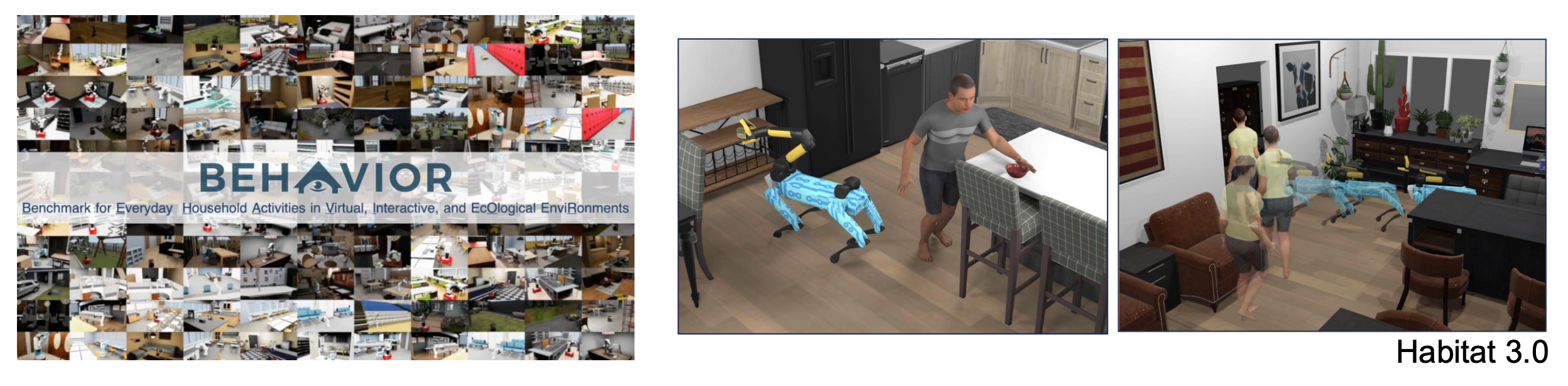
既然现实世界的评估不那么容易,于是很自然地想到通过模拟(simulation) 进行评估。
- 模拟与现实之间的差距:刚性 / 可变形 / 布料
- 高效资产生成
- 真实世界的数字化
- 逼真且多样场景的程序生成
- 模拟与现实之间的关联
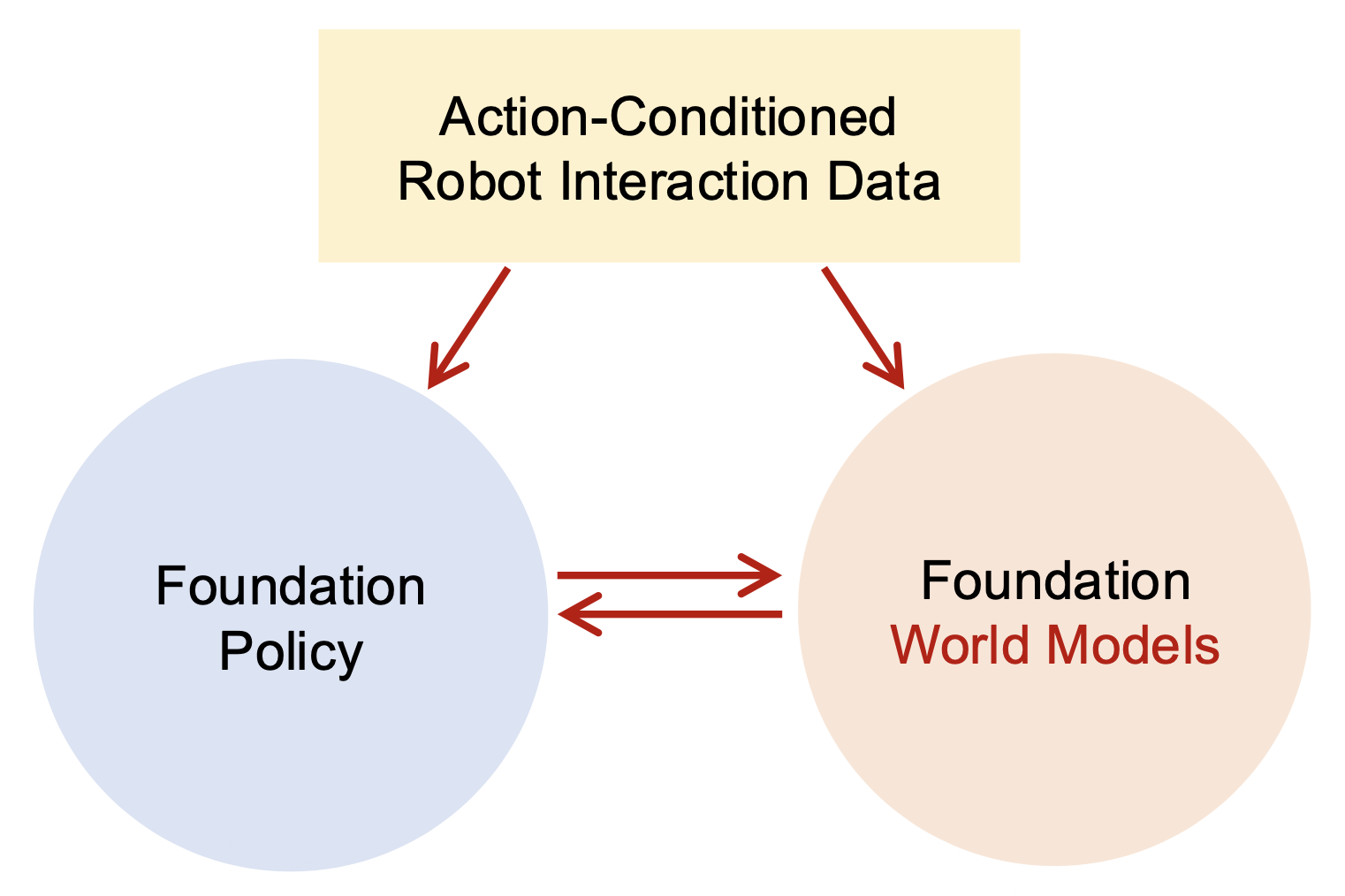
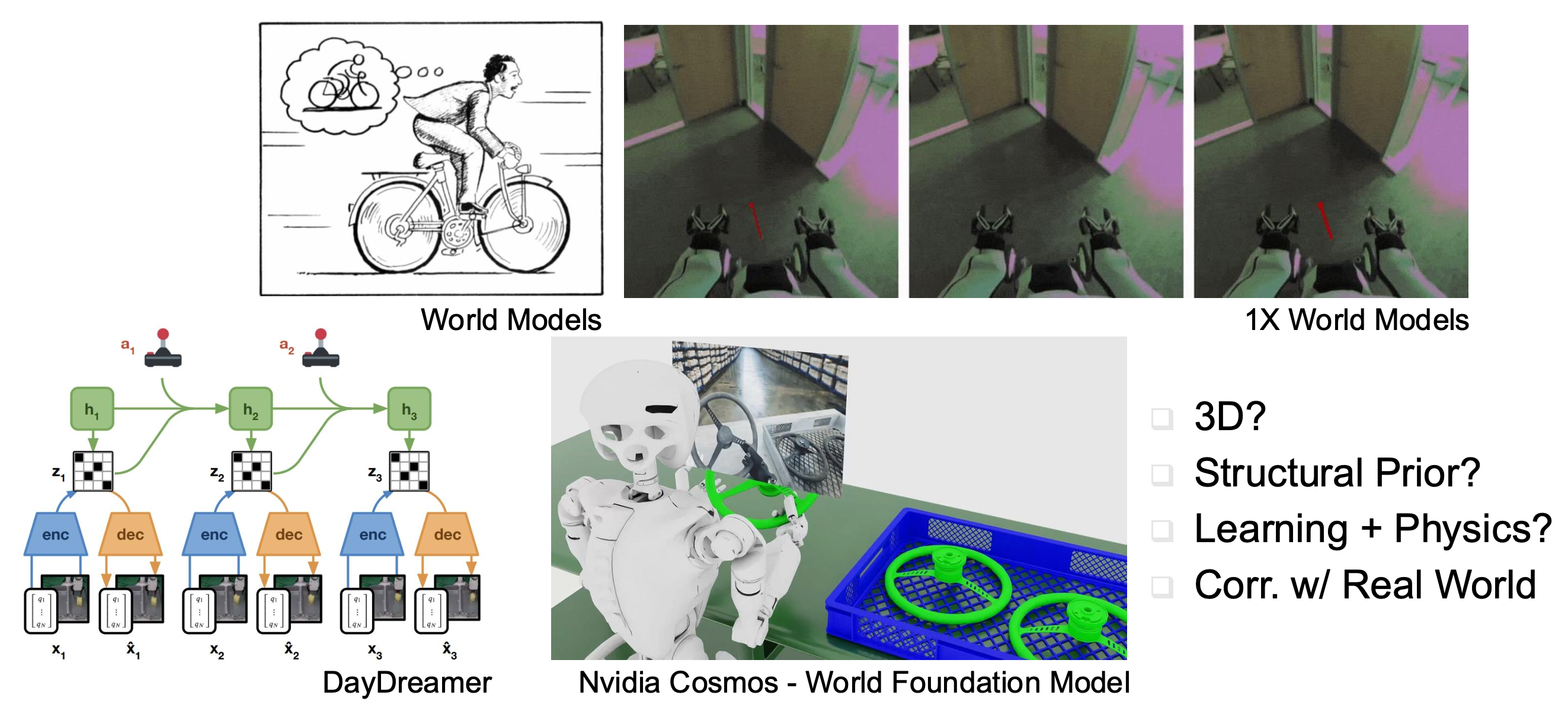
Foundation World Models⚓︎
「世界模型(world models)」的一种可能定义:行动条件下的未来预测 (action-conditioned future prediction)。
例子
Foundation Models for Embodied Agents⚓︎
当前的基座模型并未针对具身智能体 (embodied agents) 进行定制。
- LLM/VLM 在与具身相关的任务中可能会失败
- 对几何 / 具身 / 物理交互的理解有限
- 从人类反馈中进行强化学习(RL)-> 从具身反馈(embodied feedback) 中进行强化学习

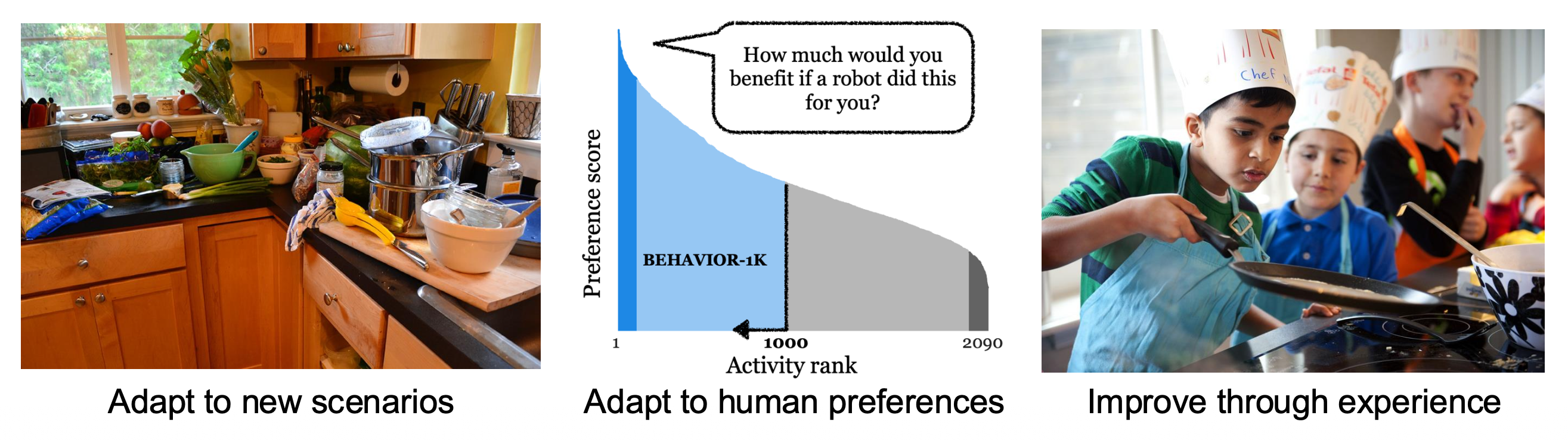
Adaptation / Life-Long Learning⚓︎
- 适应新场景
- 适应人类偏好
- 自我提升 / 终身学习 (life-long learning)
Practical Considerations of Foundation Models⚓︎
- 每个机器人工作都是一个系统工作
- 系统级考虑:延迟 / 计算 / 模块之间的通信
评论区