Computational Photography⚓︎
约 1950 个字 预计阅读时间 10 分钟
核心知识
- HDR
- 曝光 = 增益(ISO)* 辐照度(光圈)* 时间(快门速度)
- 动态范围
- 实现思路:曝光包围 + 合并
- 去模糊
- 非盲图像反卷积(NBID
) :逆滤波器 + 维纳滤波器 - 优化:添加关于原图像的 L1 正则化项
- 盲图像反卷积(BID
) :再添加关于核的 L1 正则化项
- 非盲图像反卷积(NBID
- 明确不考的:上色、超分辨率
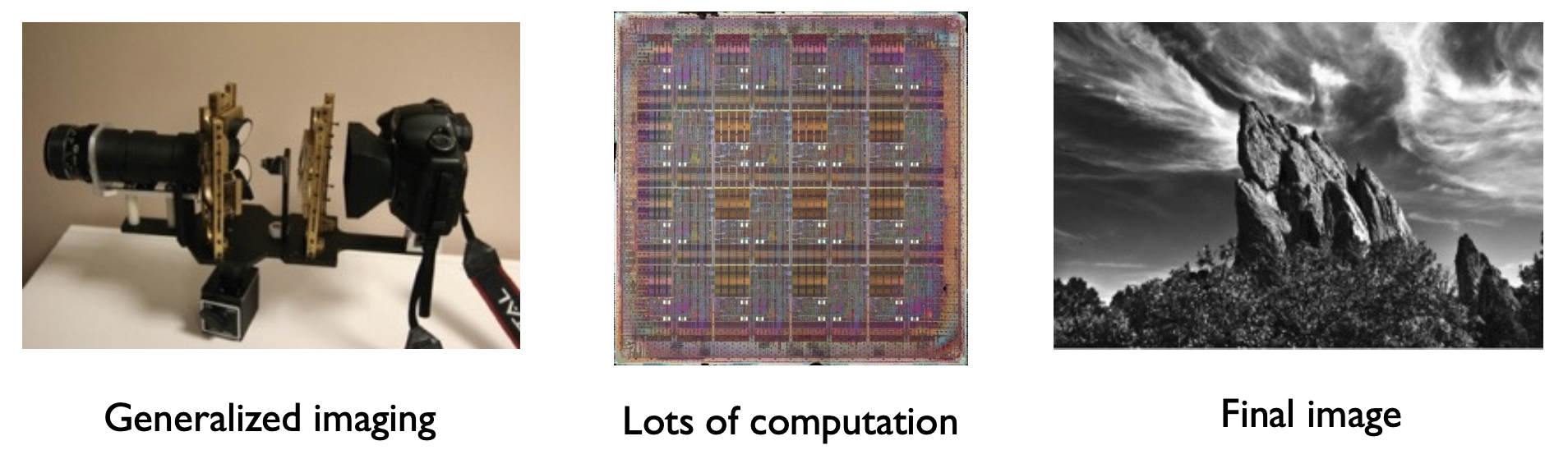
计算摄影学(computational photography)
- 传感器记录的数据并非最终图像
- 对最终图像进行一定计算,从而达到我们想要的效果
High Dynamic Range Imaging (HDR)⚓︎
例子

曝光(exposure):粗略地说,就是给定固定场景下捕获图像的「亮度」(brightness),可以用以下式子表示: $$ \text{Exposure} = \text{Gain} \times \text{Irradiance} \times \text{Time} $$
-
增益(gain) 由 ISO(感光度)控制
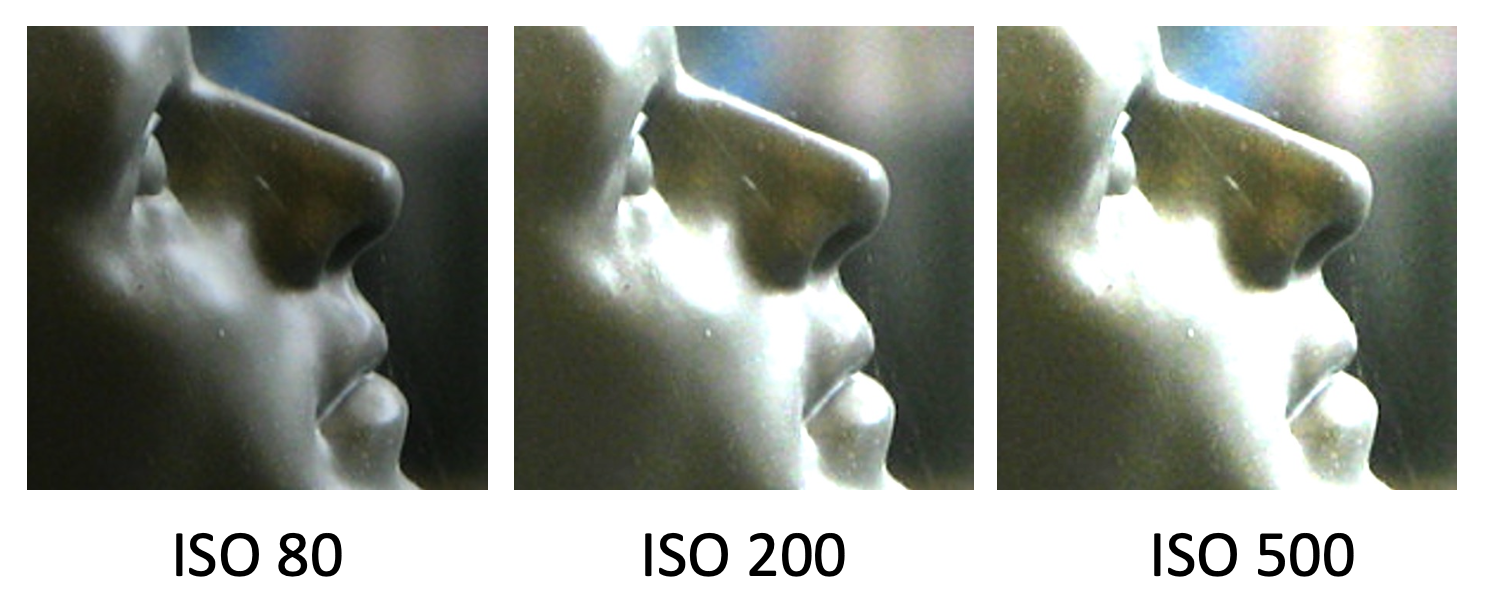
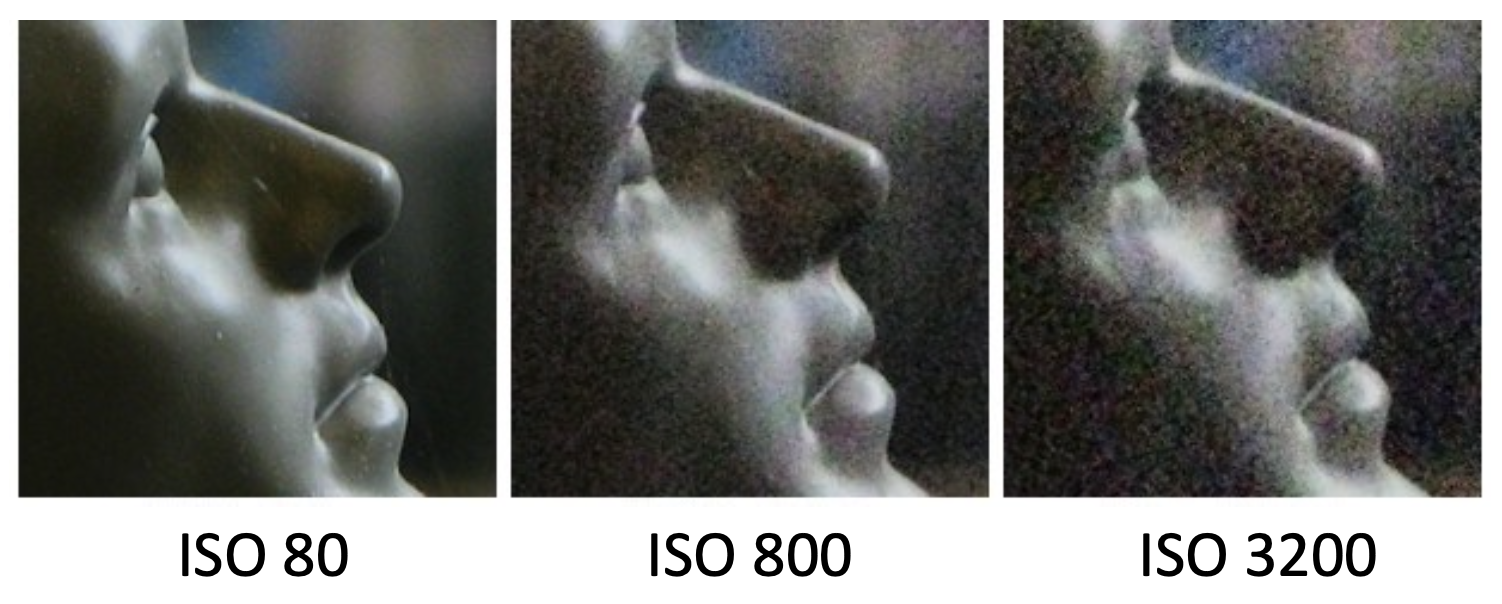
- ISO 的副作用:随着 ISO 的增大,图像会变得非常粗糙,因为噪音被放大了
-
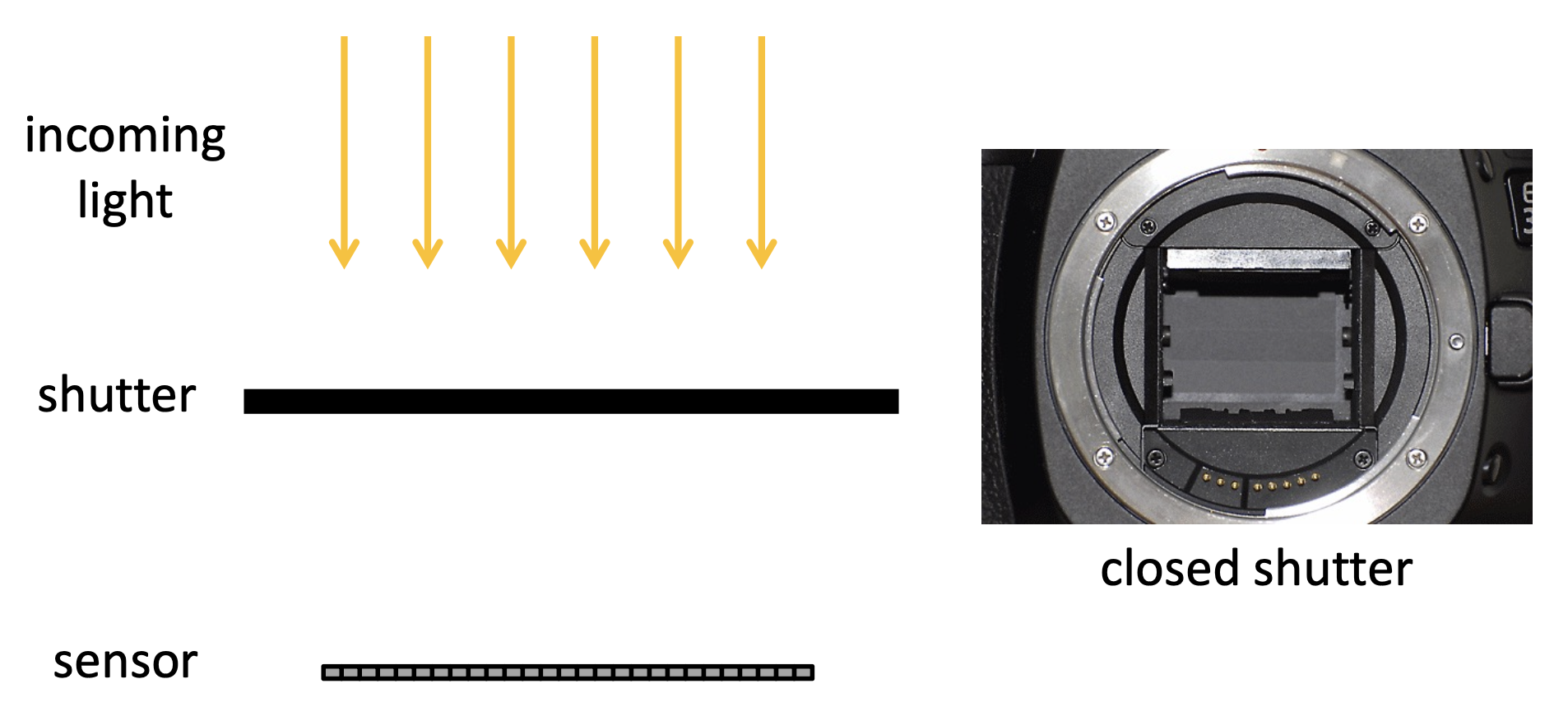
辐照度(irradiance) 由光圈(aperture) 控制

-
时间(time) 由快门速度(shutter speed) 控制
拍照时,平均曝光(averaged exposure) 应位于传感器测量范围的中间。这样照片既有亮部也有暗部,且细节丰富。
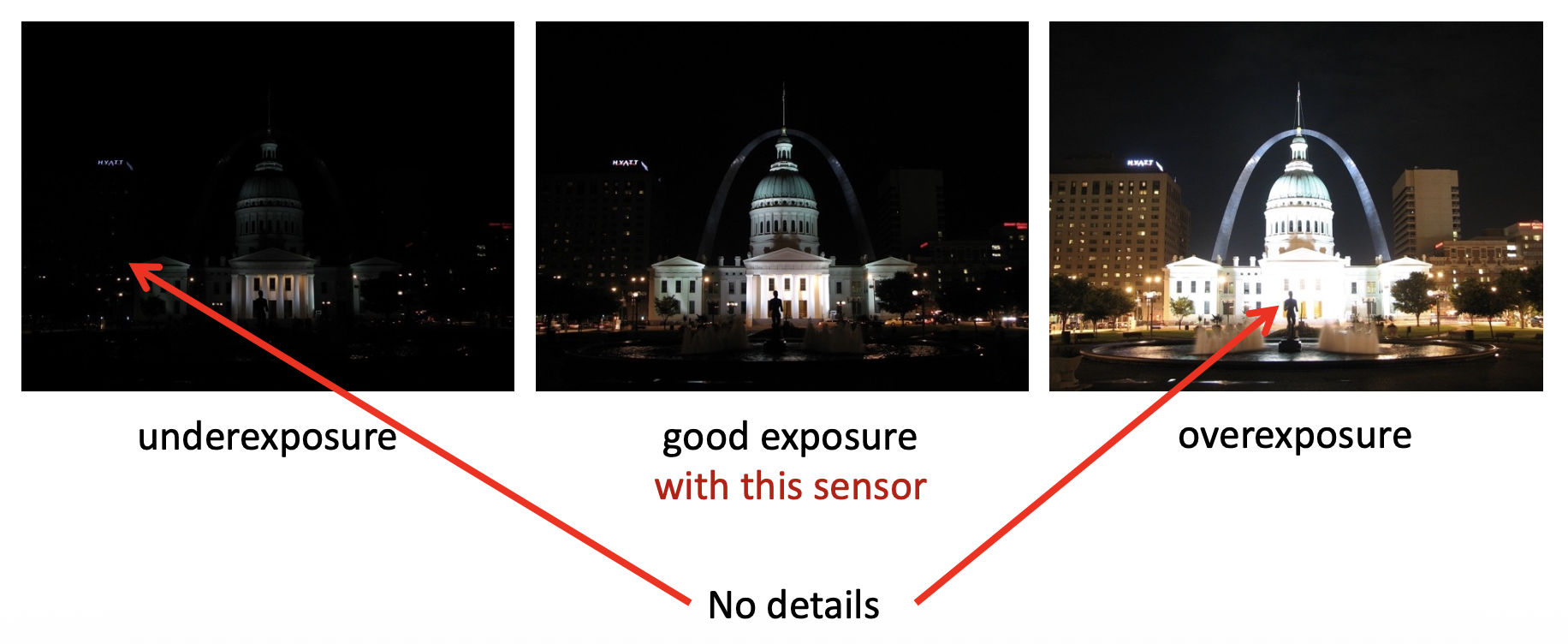
动态范围(dynamic range):某一定量(通常是亮度)的最大值和最小值之间的比例。
例子
- 10:1 -> 打印的照片(在光泽纸张上比例更高)
- 256:1 -> 8 位 RGB 图像
- 1000:1 -> LCD 显示器
- 4096:1 -> 数码单反相机 (digital SLR)(12 位)
- 100000:1 -> 现实世界
挑战
-
传感器的测量范围与世界的动态范围不匹配
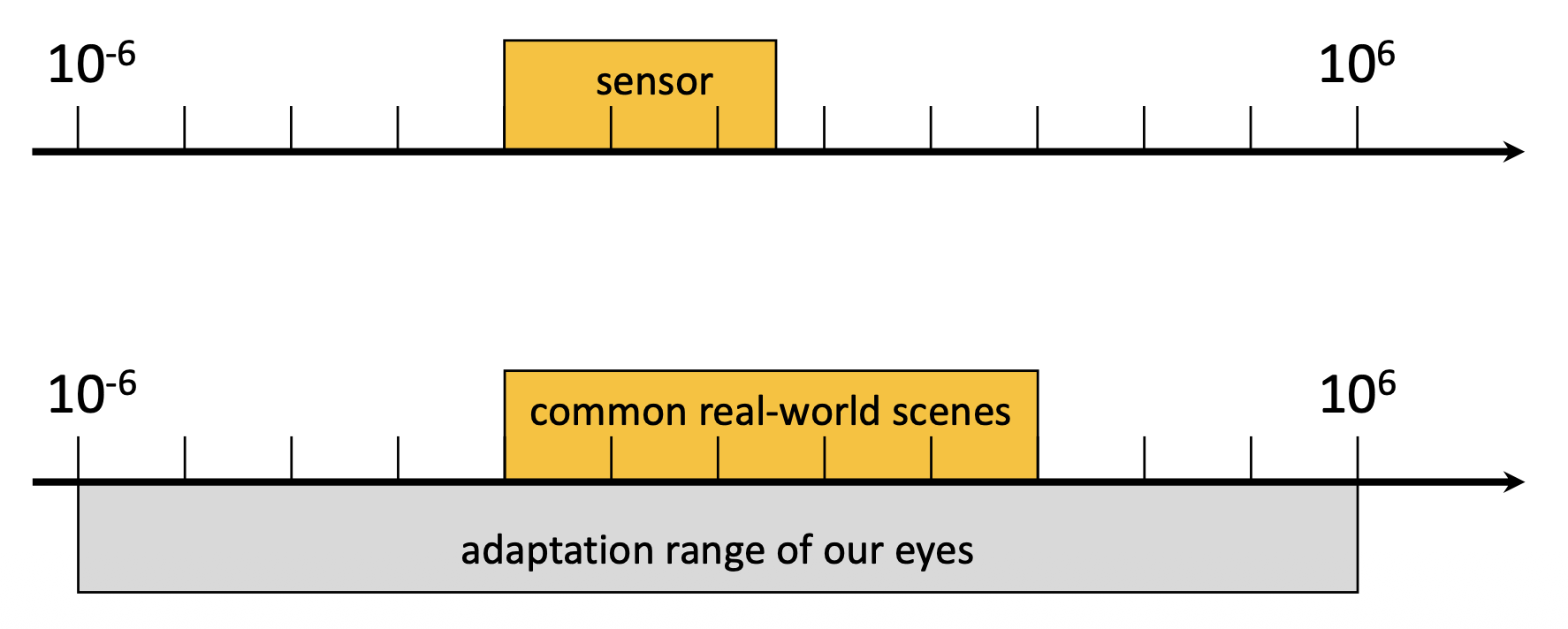
-
因为量化,图像的动态范围更低(8 位 -> 256)
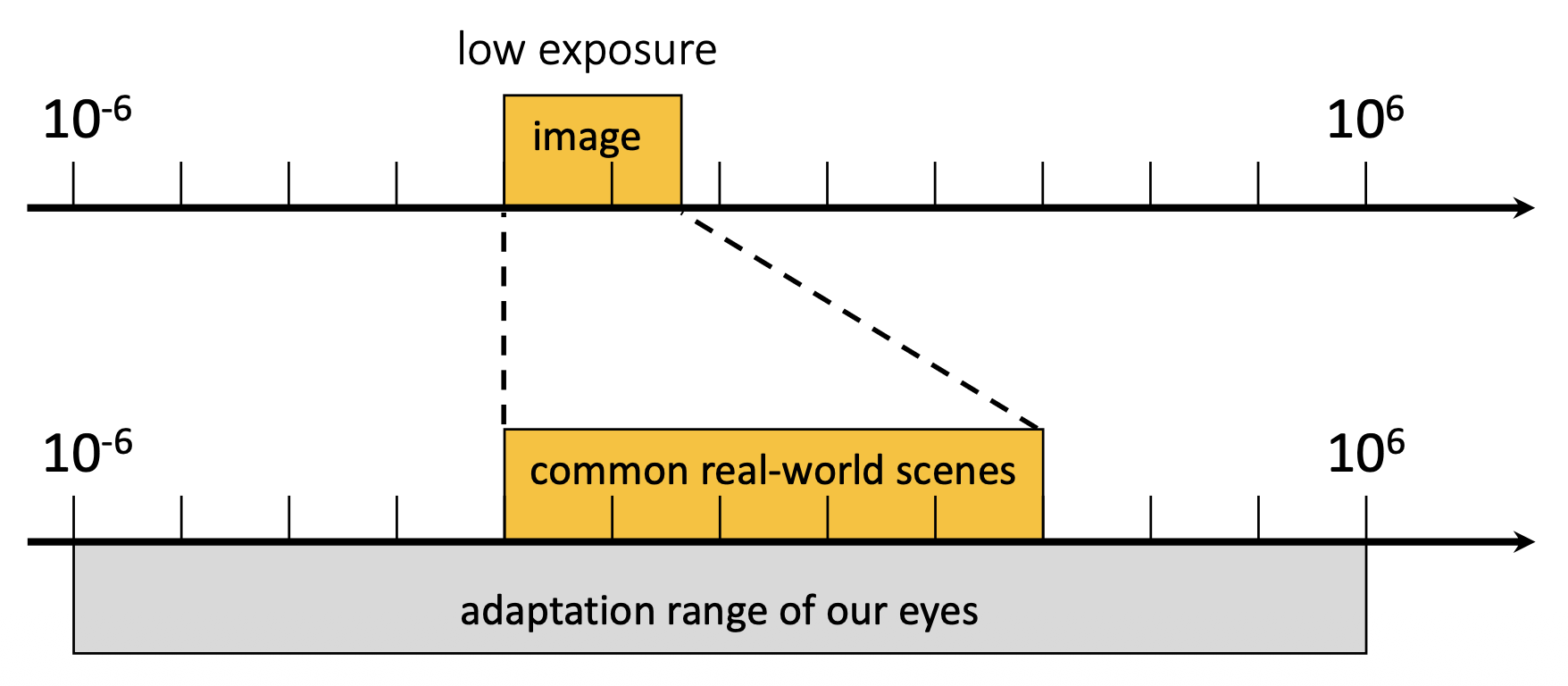
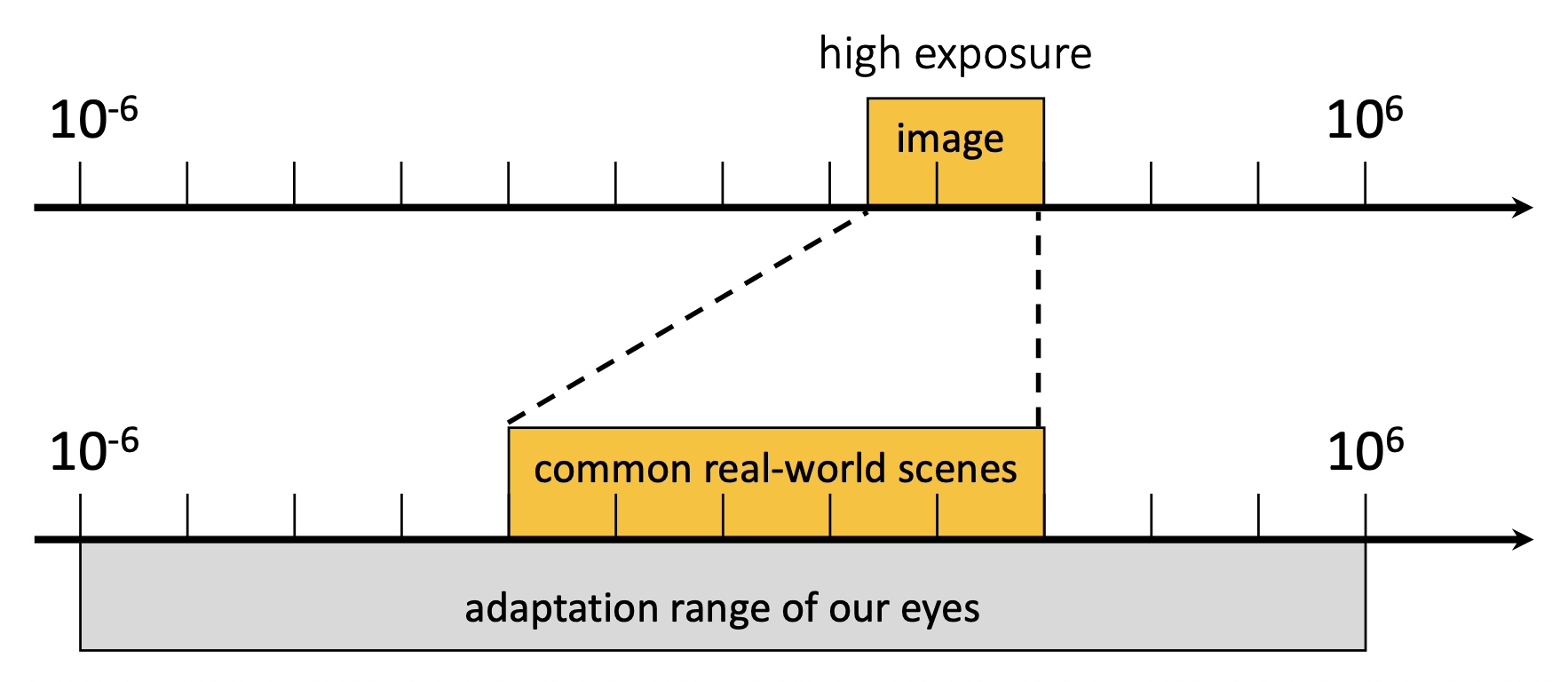
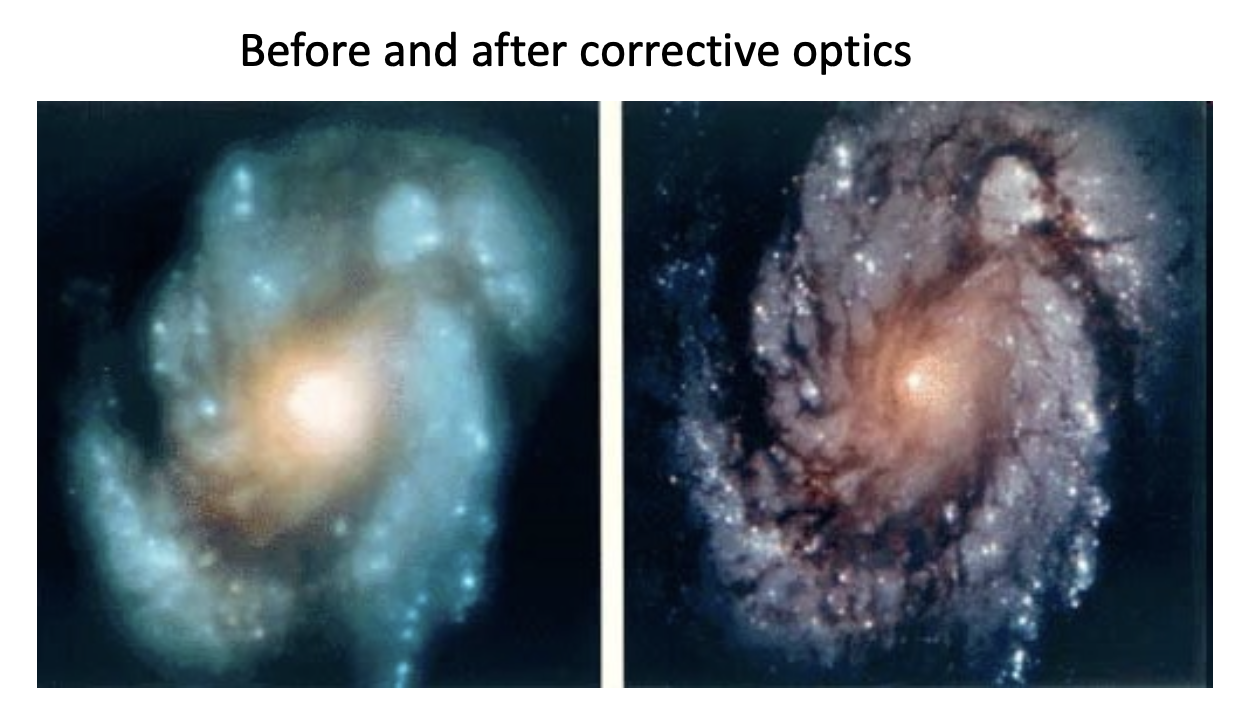
比对


关键思路:
-
曝光包围(exposure bracketing):在不同曝光下捕捉多个 LDR 图像
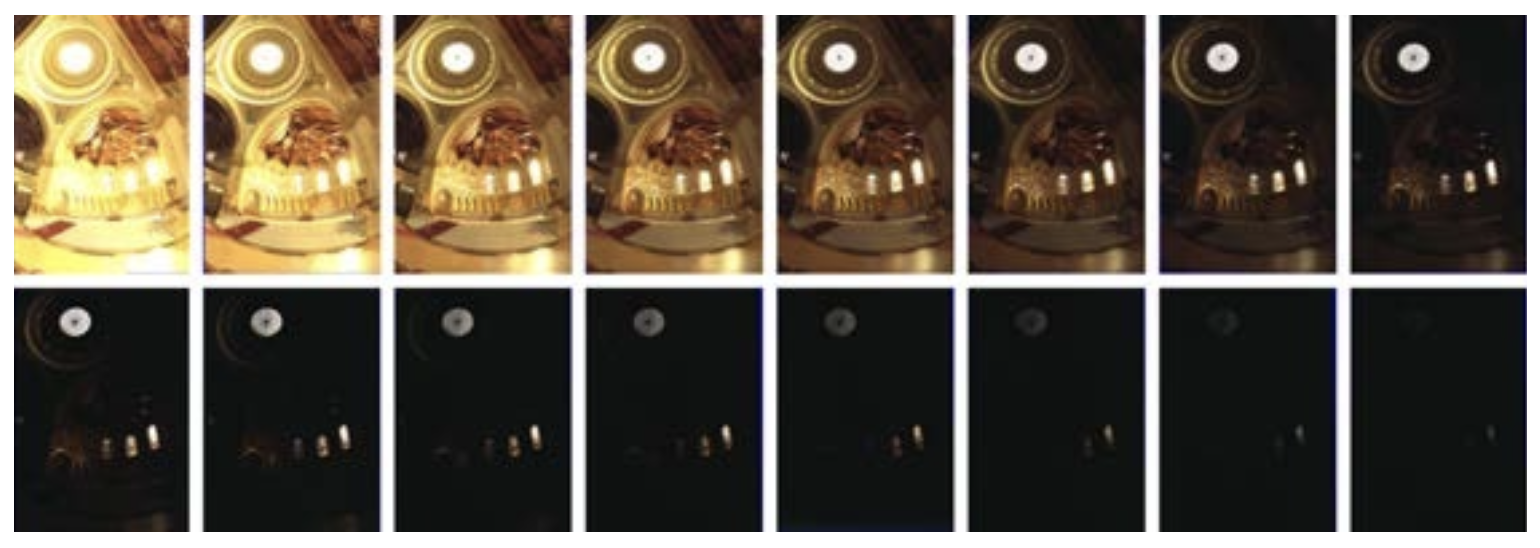
- 假设对于图像像素 \((x, y)\),其场景辐射率 (radiance) 为 \(L(x, y)\)
-
不同曝光时间下拍摄的图像:
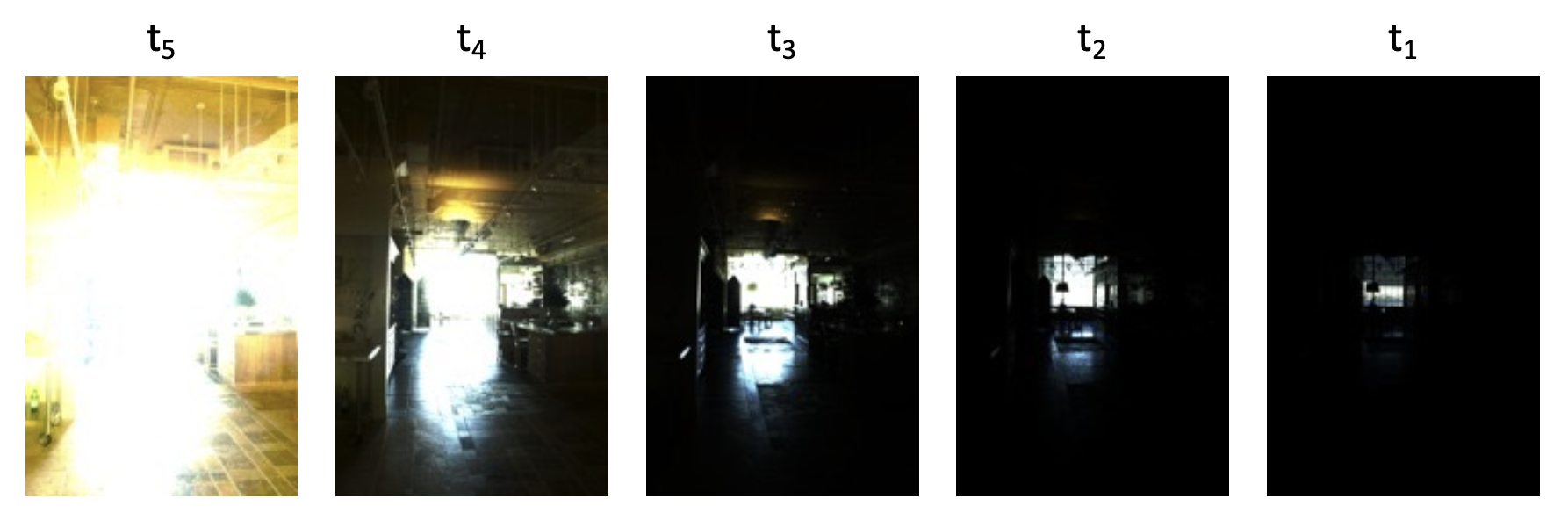
-
作为关于 \(L(x, y)\) 的函数,图像 \(I(x, y)\) 的表达式为:
\[ I(x, y) = \text{clip}[t_i \cdot L(x, y) + \text{noise}] \]注:\(\text{clip}\) 函数限制像素值在合法范围内,比如超过最大值就强制设置为最大值
-
合并(merging):将它们合并成一张单张 HDR 图像
-
对每个像素:
-
寻找每张图像上的“有效像素”
( (噪声)0.05 < 像素 < 0.95(裁剪 (clipping)) )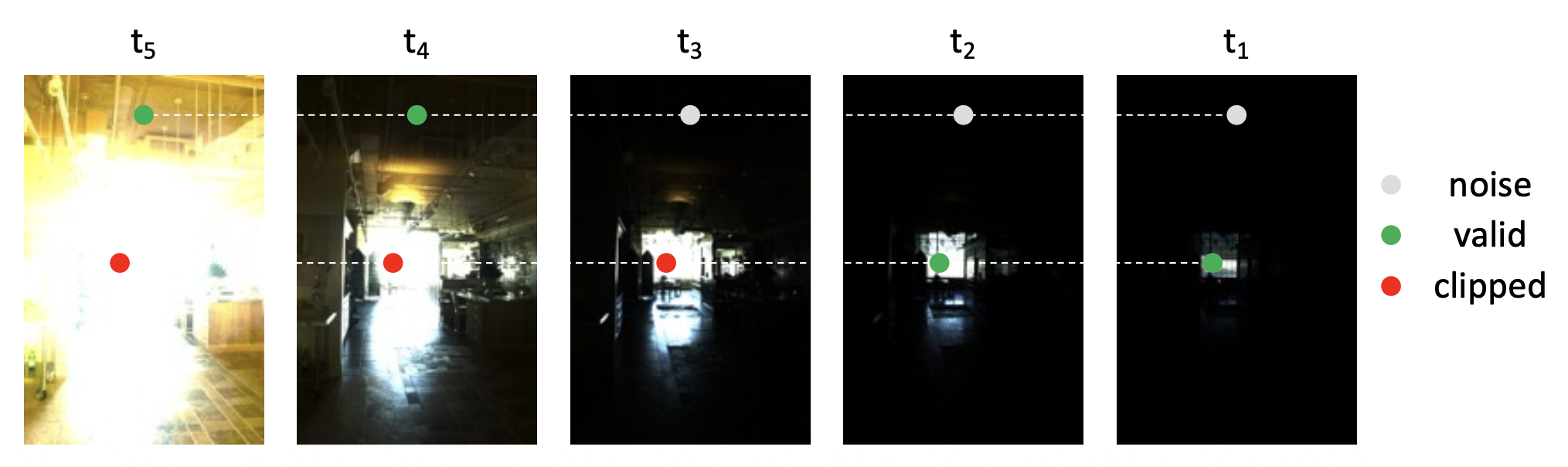
-
为有效像素值进行适当加权(像素值 / t i)
- 形成一个新的像素值,作为有效像素值的加权平均
-
-
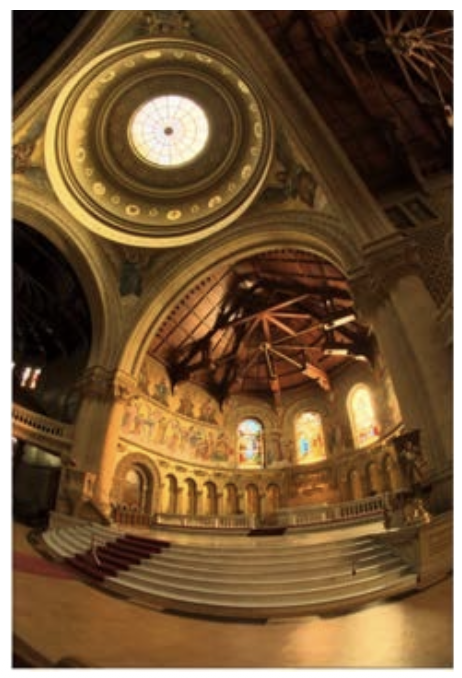
合并结果:

-
Deblurring⚓︎
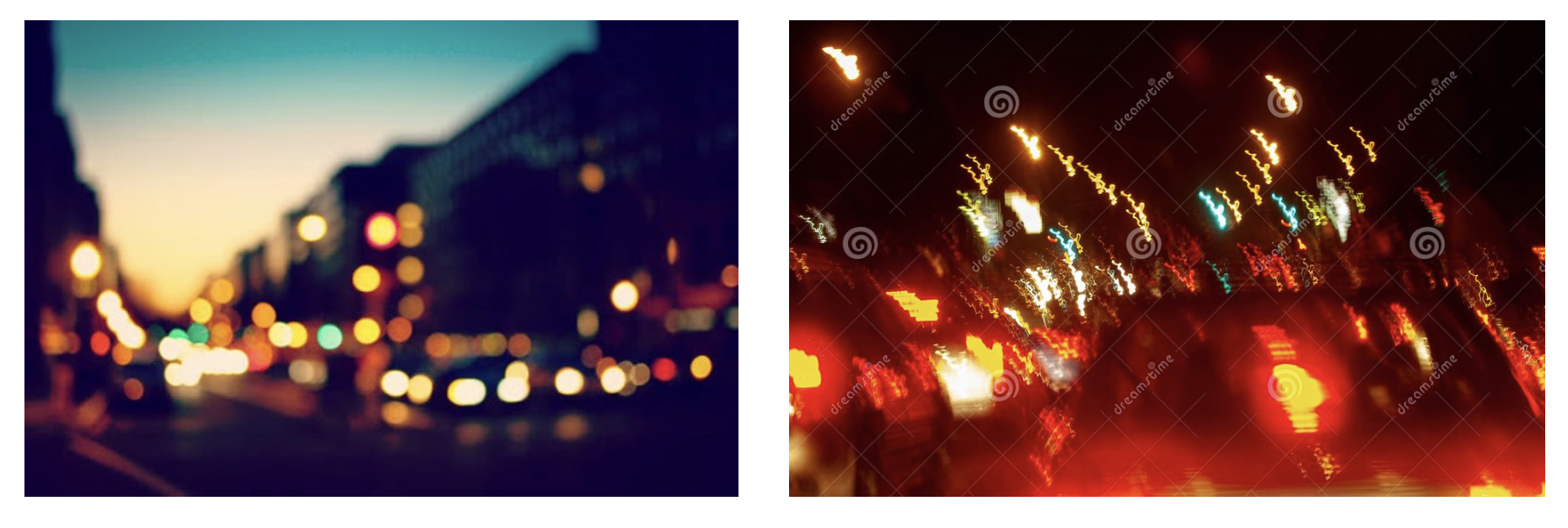
图像模糊(blurring) 的原因:
-
失焦(defocus):拍摄对象不在景深范围内

-
运动模糊(motion blur):物体移动或相机不稳定

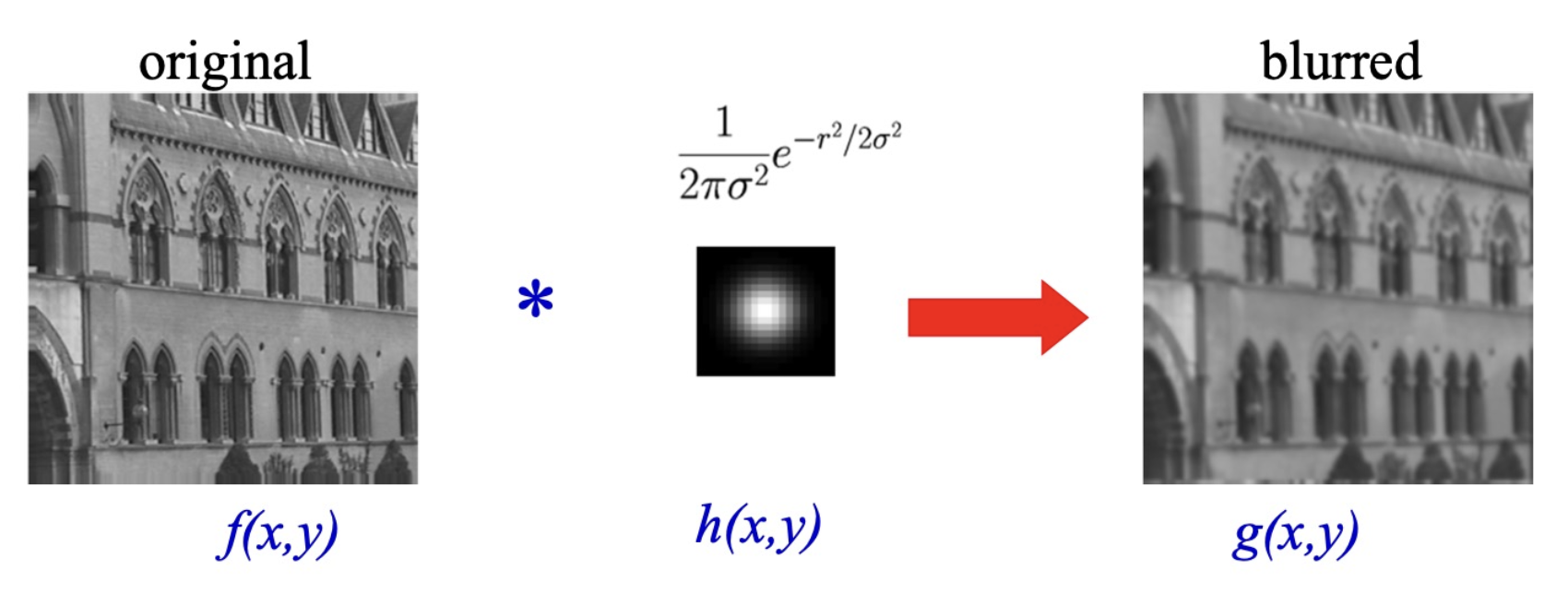
下面我们用数学建模来描述图像模糊:
- 模糊的过程可以通过卷积来描述
- 模糊后的图像称为卷积核(convolution kernel)
- 失焦模糊的模式取决于光圈形状
- 抖动(shaking) 模糊的模式取决于相机轨迹
例子

因此,去模糊(deblurring) 的操作等同于反卷积(deconvolution)。下面给出具体的实现方法:
Non-Blind Image Deconvolution (NBID)⚓︎
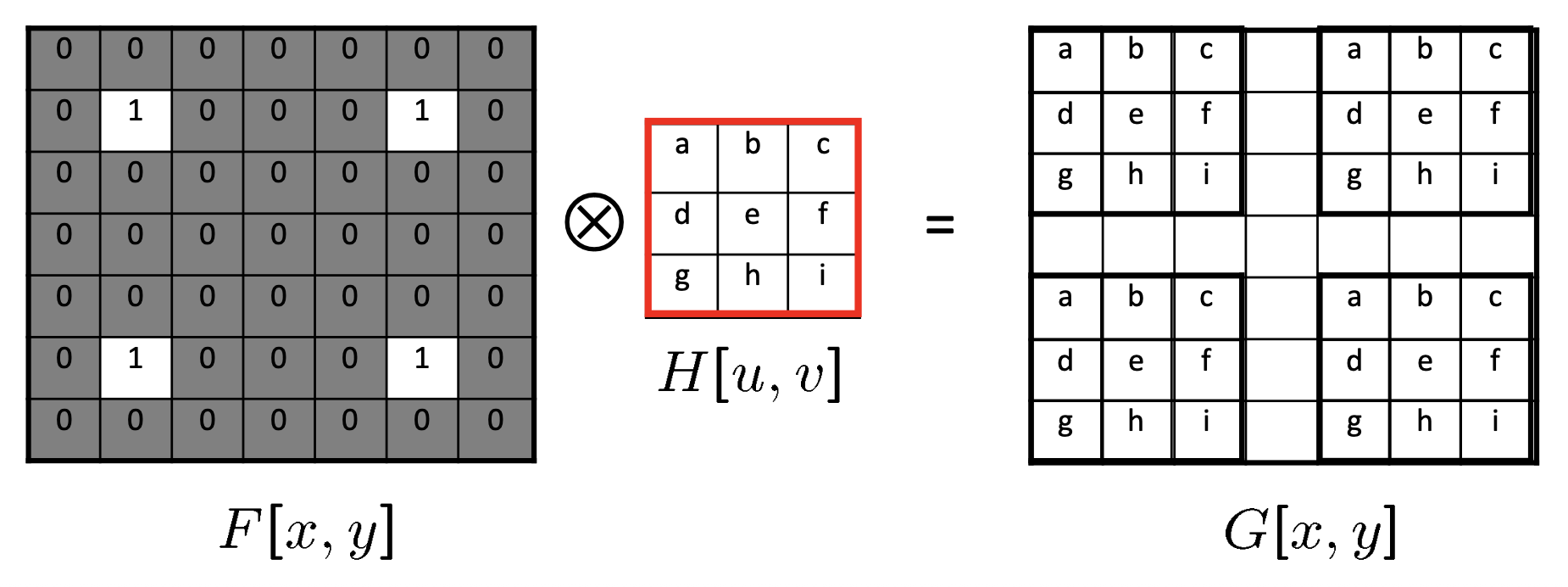
非盲图像反卷积(non-blind image deconvolution, NBID)

- \(G\):捕获图像(已知)
- \(F\):待求解图像(未知)
- \(H\):卷积核(已知)
频域 (frequency domain) 反卷积:
-
空间域中的卷积 = 频率域中的乘积
\[ FFT(G) = FFT(F \otimes H) = FFT(F) \times FFT(H) \] -
那么,空间反卷积 = 频域中的除法
\[ F = IFFT(FFT(G) \div FFT(H)) \] -
通常称为逆滤波器(inverse filter)

例子
高斯模糊:
逆滤波的结果:
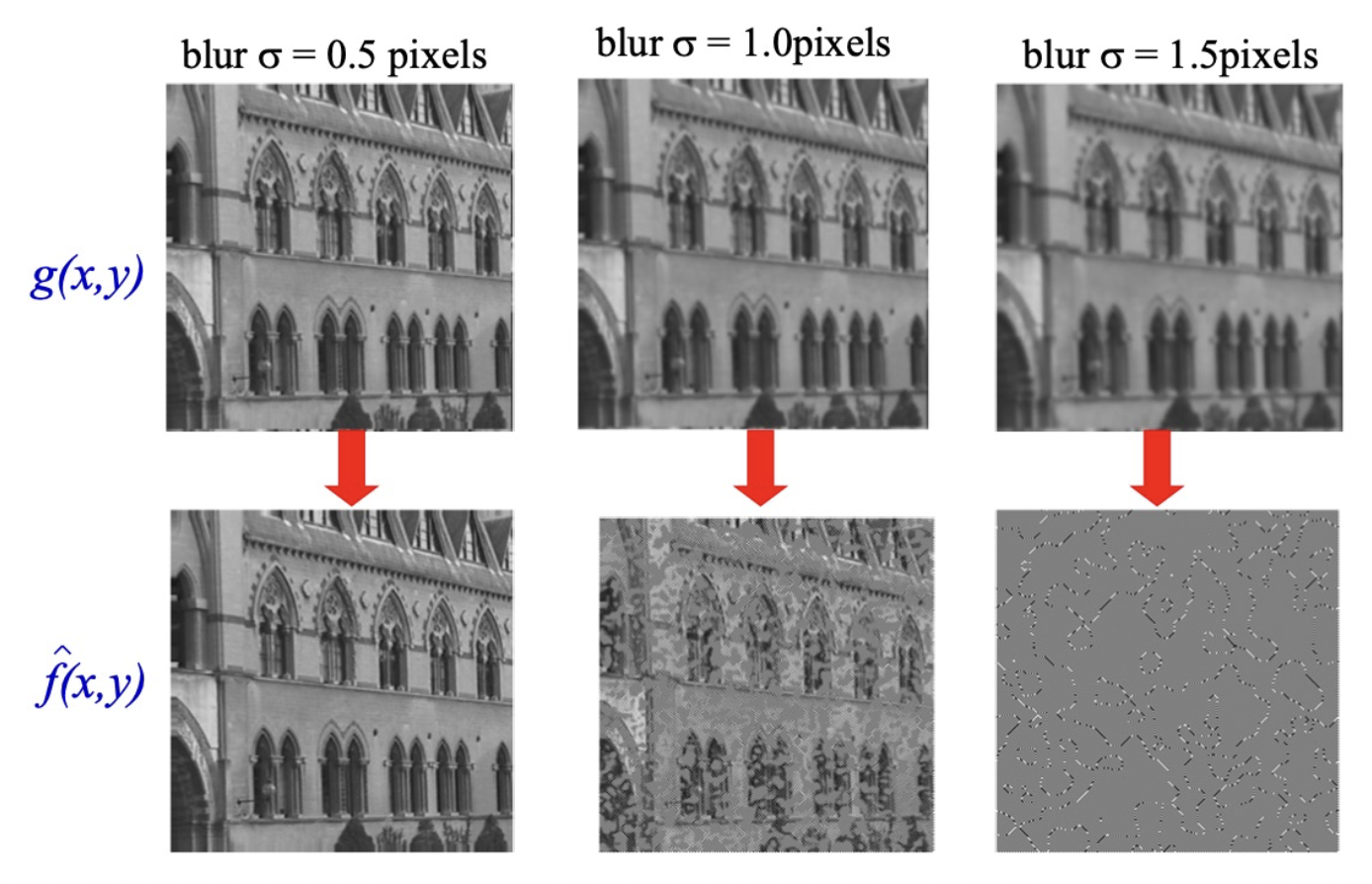
模糊核通常是一个低通滤波器,而逆滤波器会放大高频成分。
因此逆滤波器有可能会放大噪声:
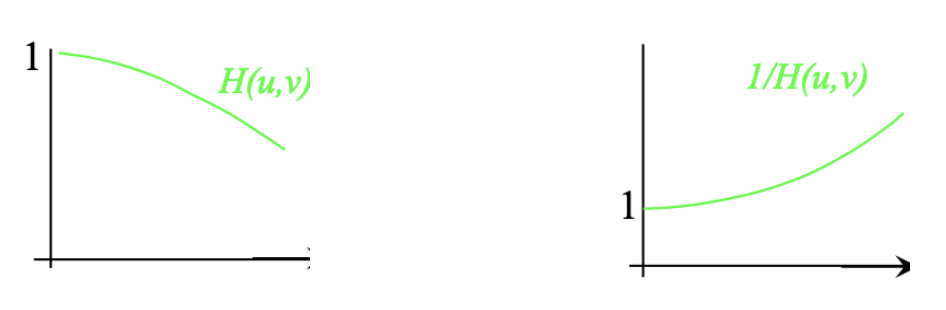
维纳滤波器(Wiener filter):在逆滤波时抑制高频。
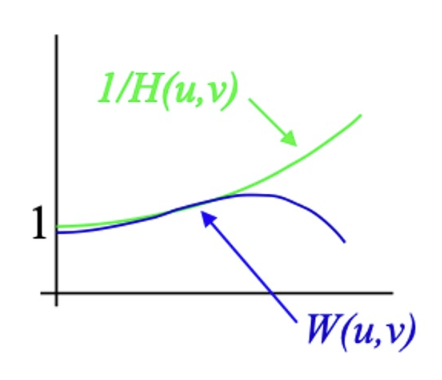
- 若 \(K = 0\),那么 \(W(u, v) = 1 / H(u, v)\),即逆滤波器
- 若 \(u, v\) 很大时,\(K \gg |H(u, v)|\),那么高频将会衰减 (attenuated)
- \(K\) 是一个常量标量,根据经验设置
例子
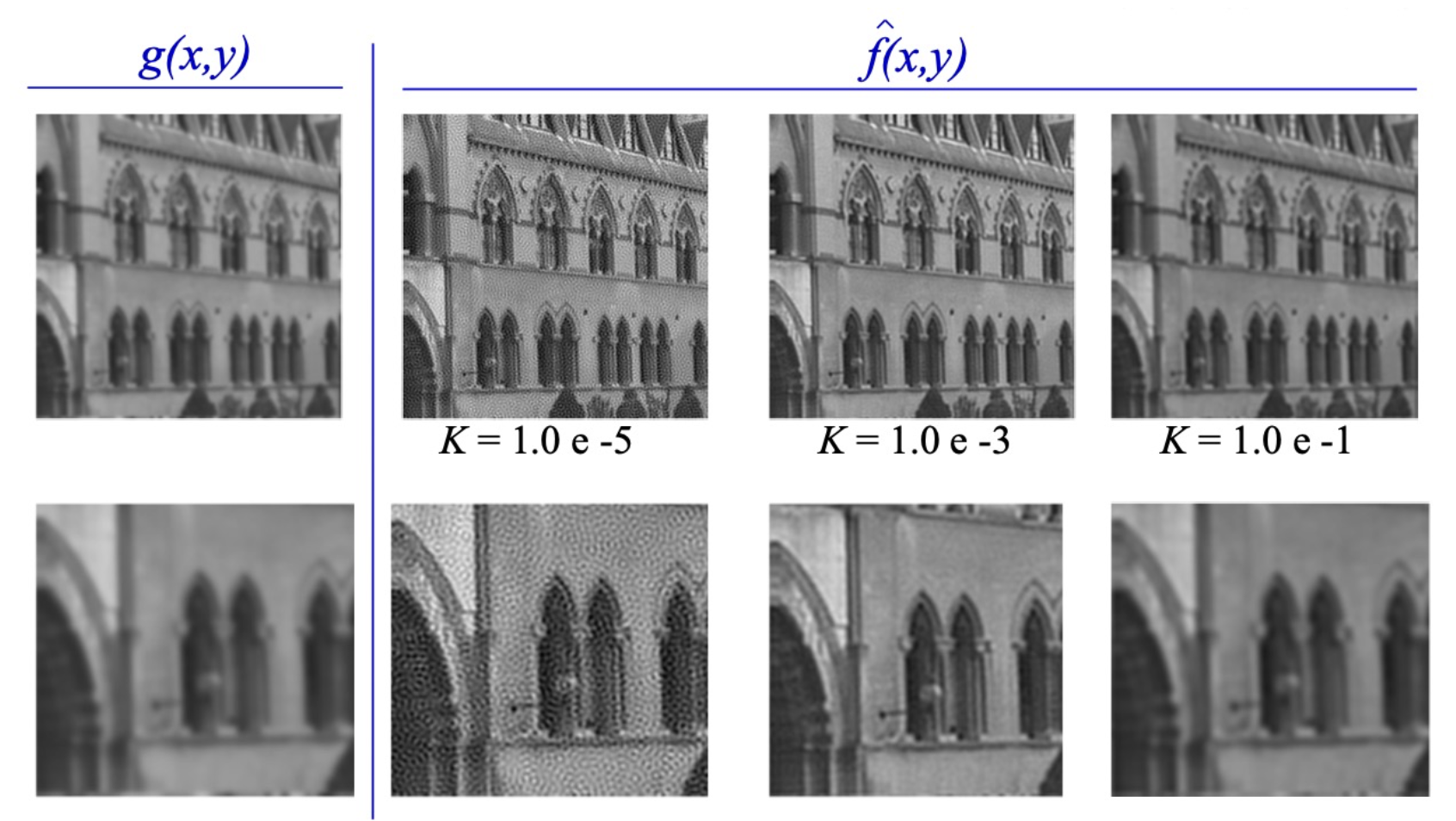
应用
Optimization⚓︎
还可以通过优化(optimization) 来实现反卷积。
- 优化的变量就是要被恢复的图像
- 目标函数
- 模糊图像与给定模糊图像的相似度(可能性)
- 恢复的图像看起来很真实(先验)
模糊图像生成过程: $$ G = F \otimes H + N $$
假设噪声 \(N\) 是高斯噪声,可能性可以通过均方误差(MSE)来衡量:
问题:反卷积是病态的(ill-posed)
换句话说就是存在多解:
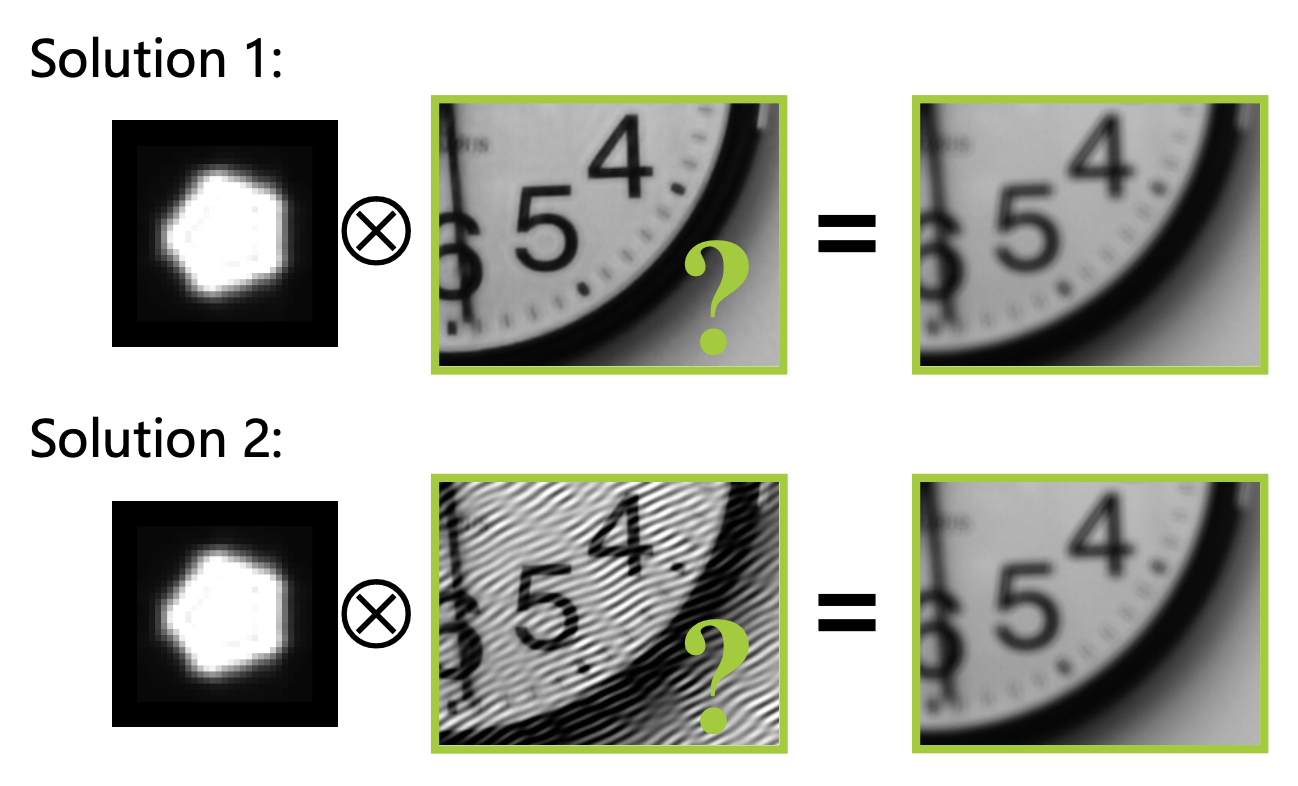
可以看到,两个不同的解可以得到相同的 MSE。
因此需要解的先验信息(prior information)。
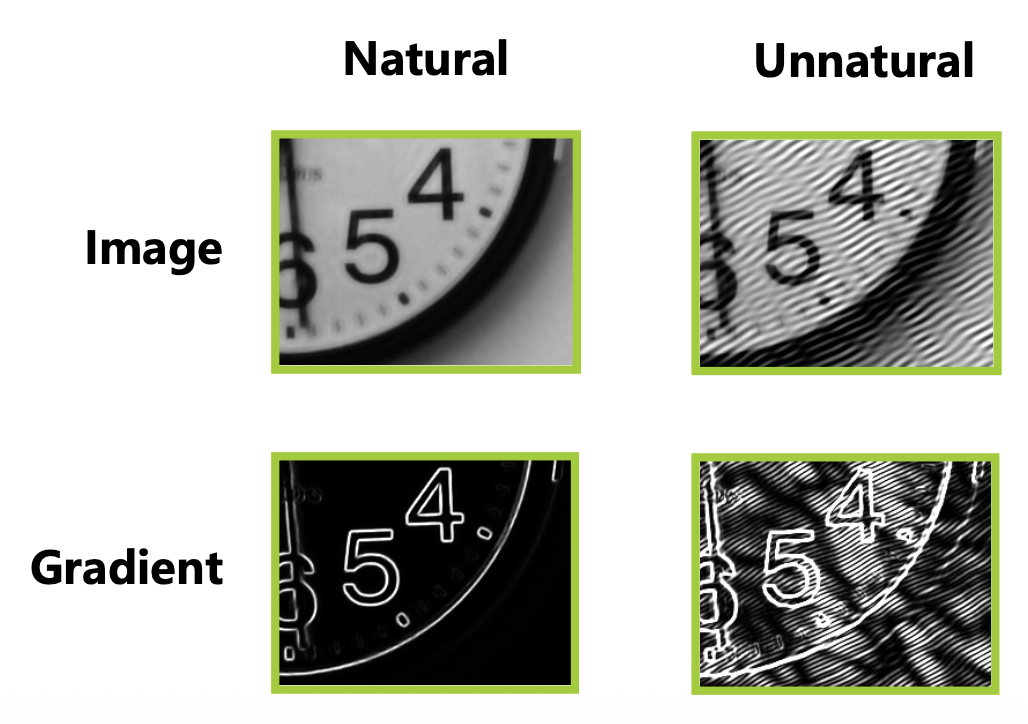
- 自然图像在片段 (segments) 上通常平滑
- 梯度图是稀疏的
- 添加 L1 正则化使图像梯度稀疏
带先验信息的反卷积:目标函数 = 可能性函数 + 正则化项 $$ \min\limits_F |G - F \otimes H |_2^2 + |\nabla F|_1 $$
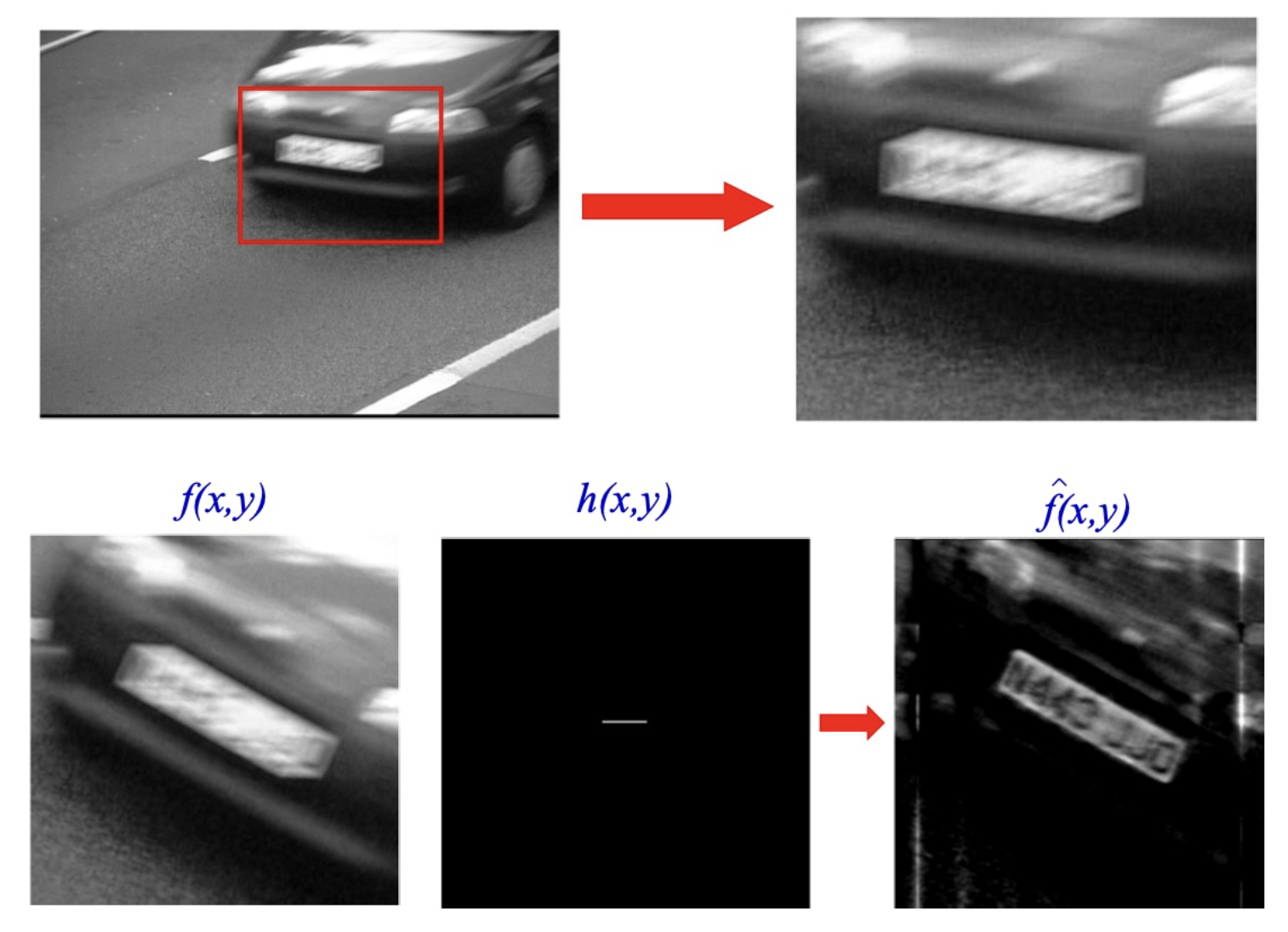
Blind Image Deconvolution (BID)⚓︎
盲图像反卷积(blind image deconvolution, BID)
- 卷积核也是未知的
- 这显然更难,因此需要更多的先验知识
核先验(kernel prior):
- 模糊核是非负且稀疏的
- 优化目标函数
例子
以下是来自论文 Removing Camera Shake from a Single Photograph, SIGGRAPH 2006 的例子:

Colorization⚓︎
直到 1970 年,彩色照片仍然非常罕见,人们只能通过黑白照片回顾历史。如今,利用技术将黑白照片转换为彩色照片是一件轻而易举的事。
上色(colorization) 指借助计算机为单色图片或视频添加颜色的过程。
有两种主要的为灰度图像上色的方法:
-
基于样本的上色 (sample-based colorization):使用样本图像
扫描目标图像,对每个像素:
- 在样本中找到最佳匹配点(比如考虑亮度与相邻像素的标准差 (standard deviation))
- 将匹配点的颜色分配给像素
-
交互式上色:用画笔交互式地绘制
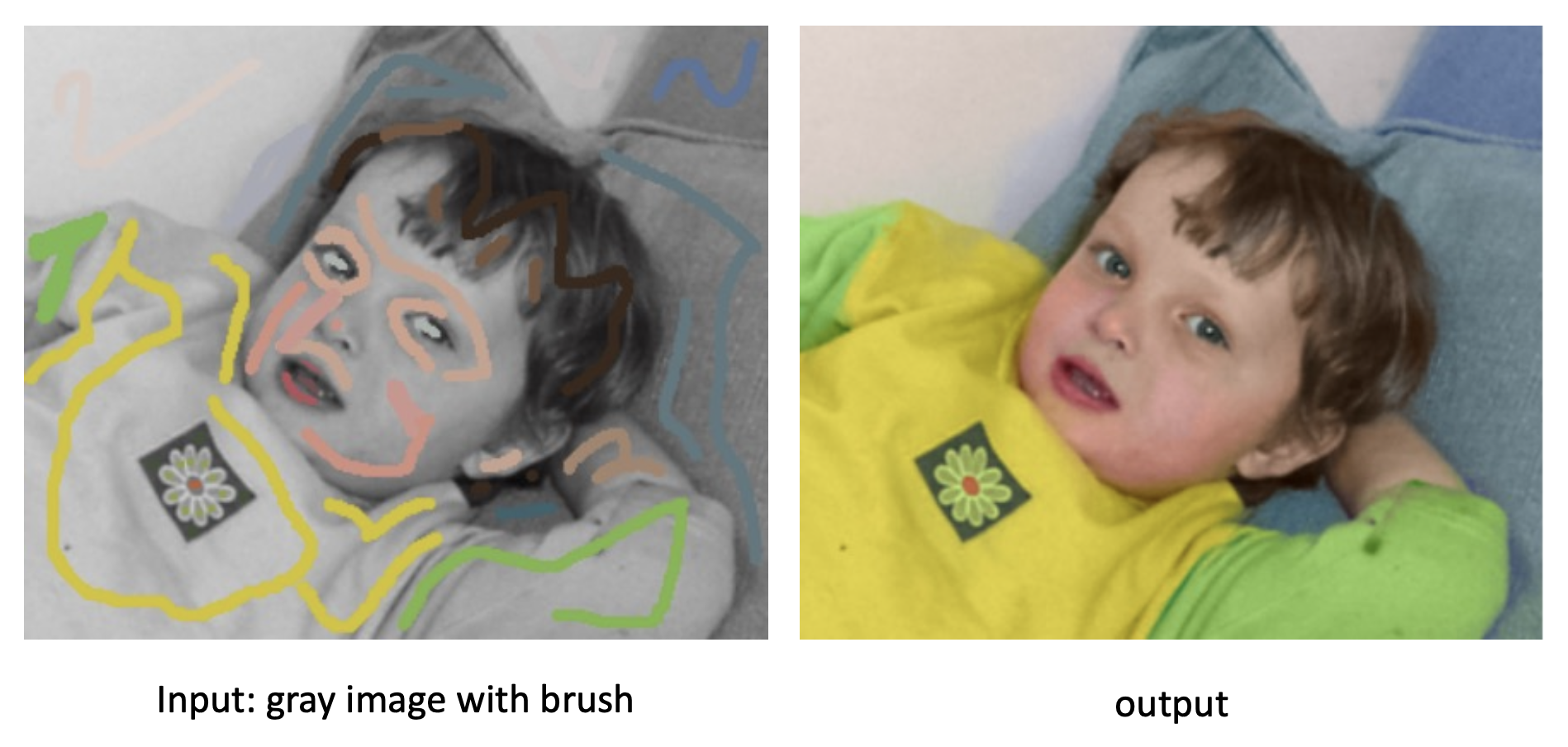
- 对于两个相邻的像素,如果亮度相似,那么颜色也应该保持相似
-
基于这个假设,着色问题被转化为一个优化问题,相应的目标函数如下:
\[ J(U) = \sum\limits_r \left(U(r) - \sum\limits_{s \in N(r)} w_{rs} U(s)\right)^2 \]- \(U(r), U(s)\):像素 \(r, s\) 的 RGB 颜色
- \(N(r)\):像素 \(r\) 的邻居像素
- \(w_{rs}\):测量 \(r, s\) 相似度的权重
-
约束条件:用户指定的笔刷像素颜色保持不变
例子



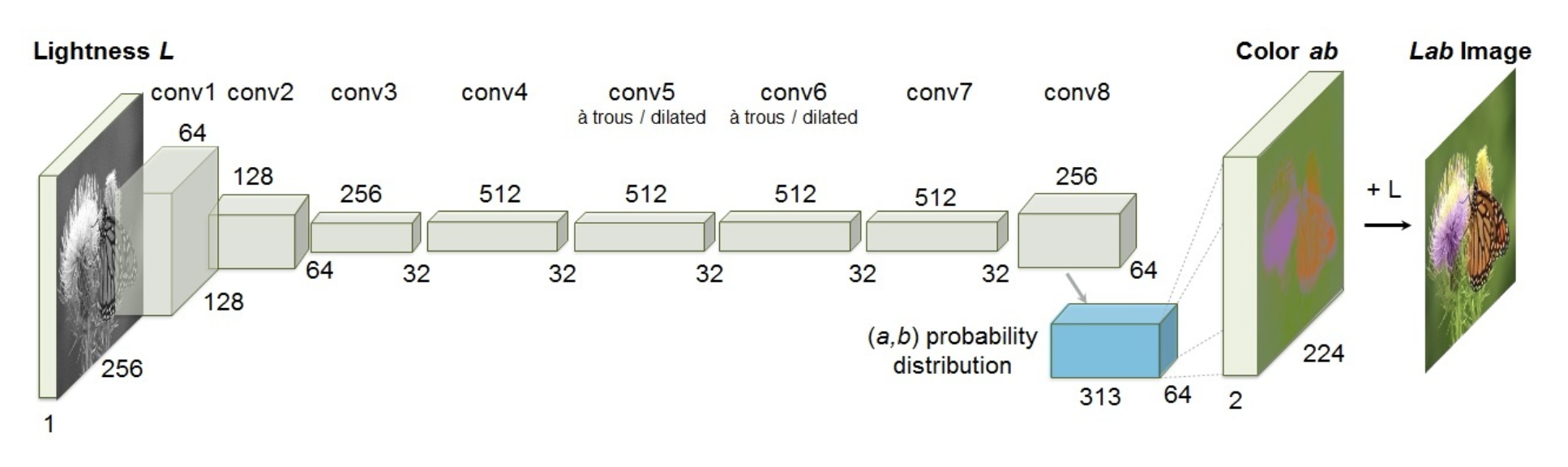
Modern Approach⚓︎
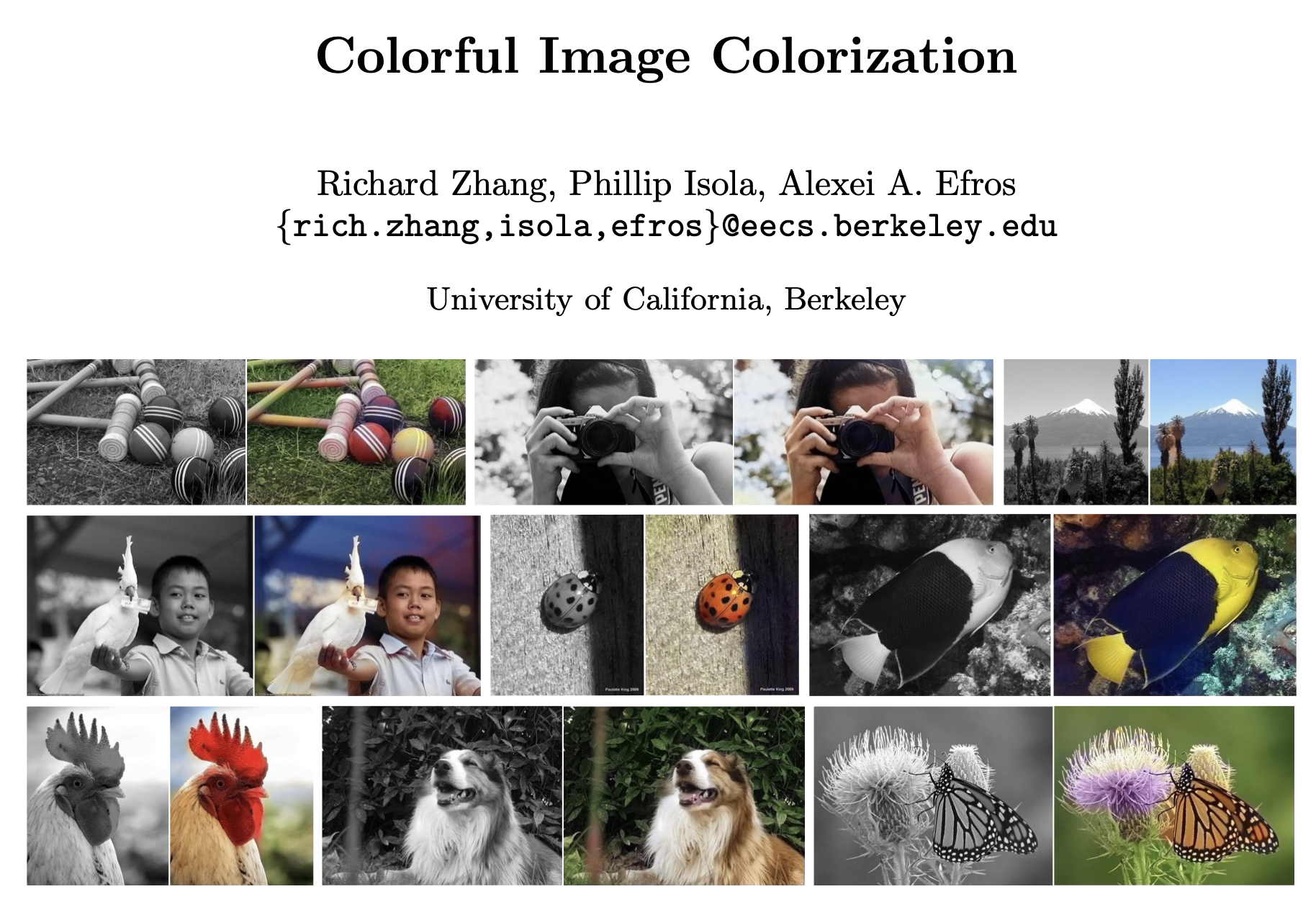
CNN(链接:http://richzhang.github.io/colorization/
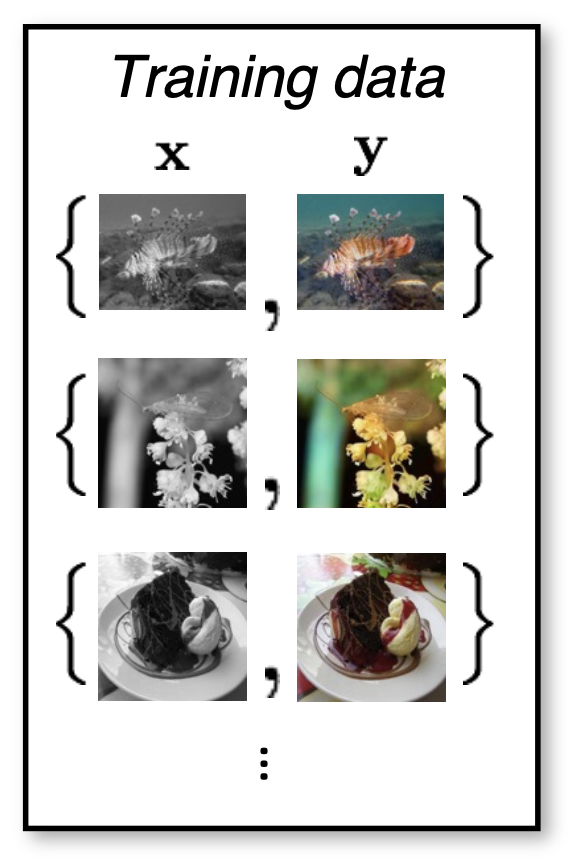
用于图像合成的损失函数:
- 重构损失:\(L(\Theta) = \|F(X; \Theta) - Y\|^2\)
- 问题:
- 无法处理多解的情况
- 无法测量图像的真实性
我们可以学习一个衡量图像是否真实的损失函数——利用生成式对抗网络(generative adversarial network, GAN):
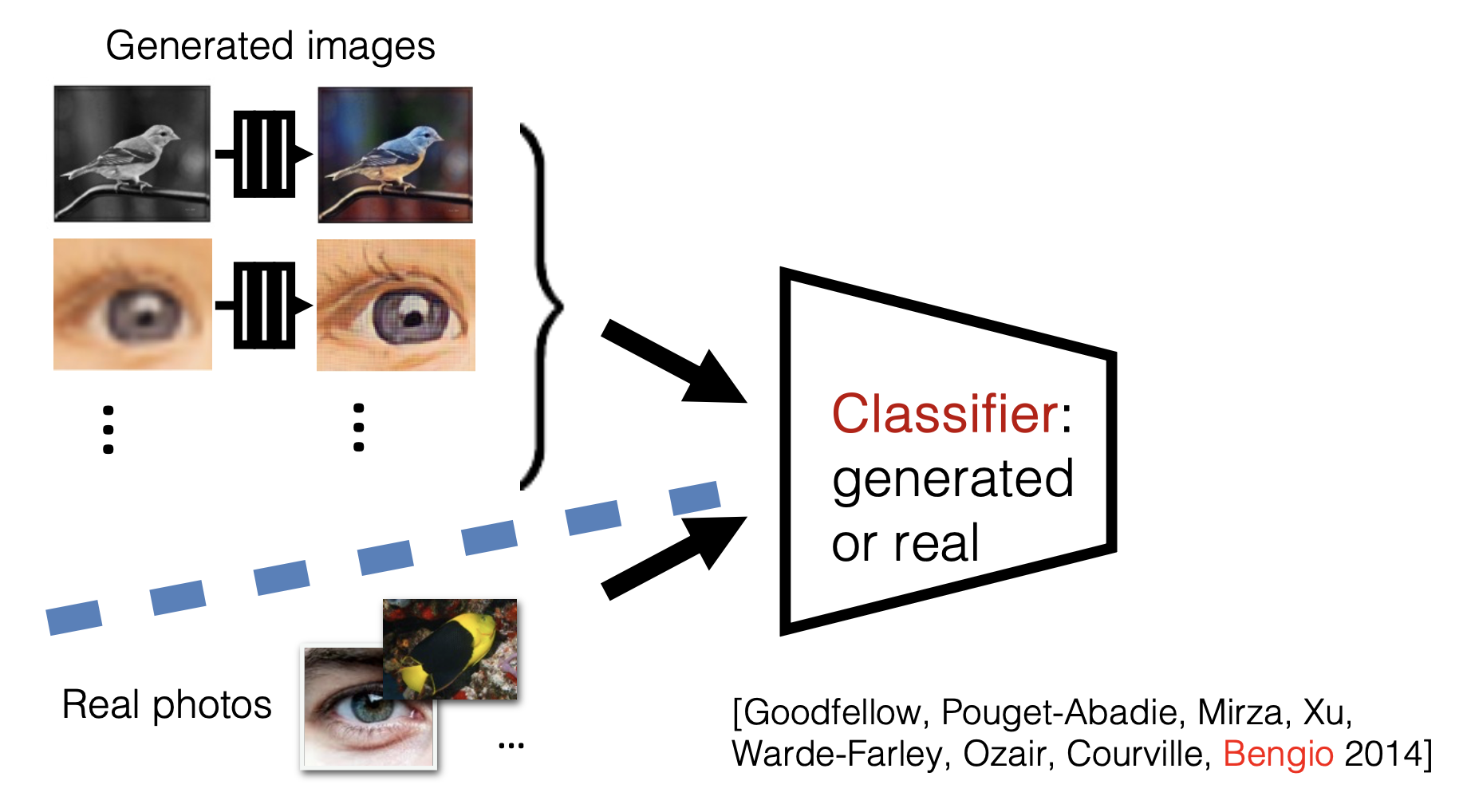
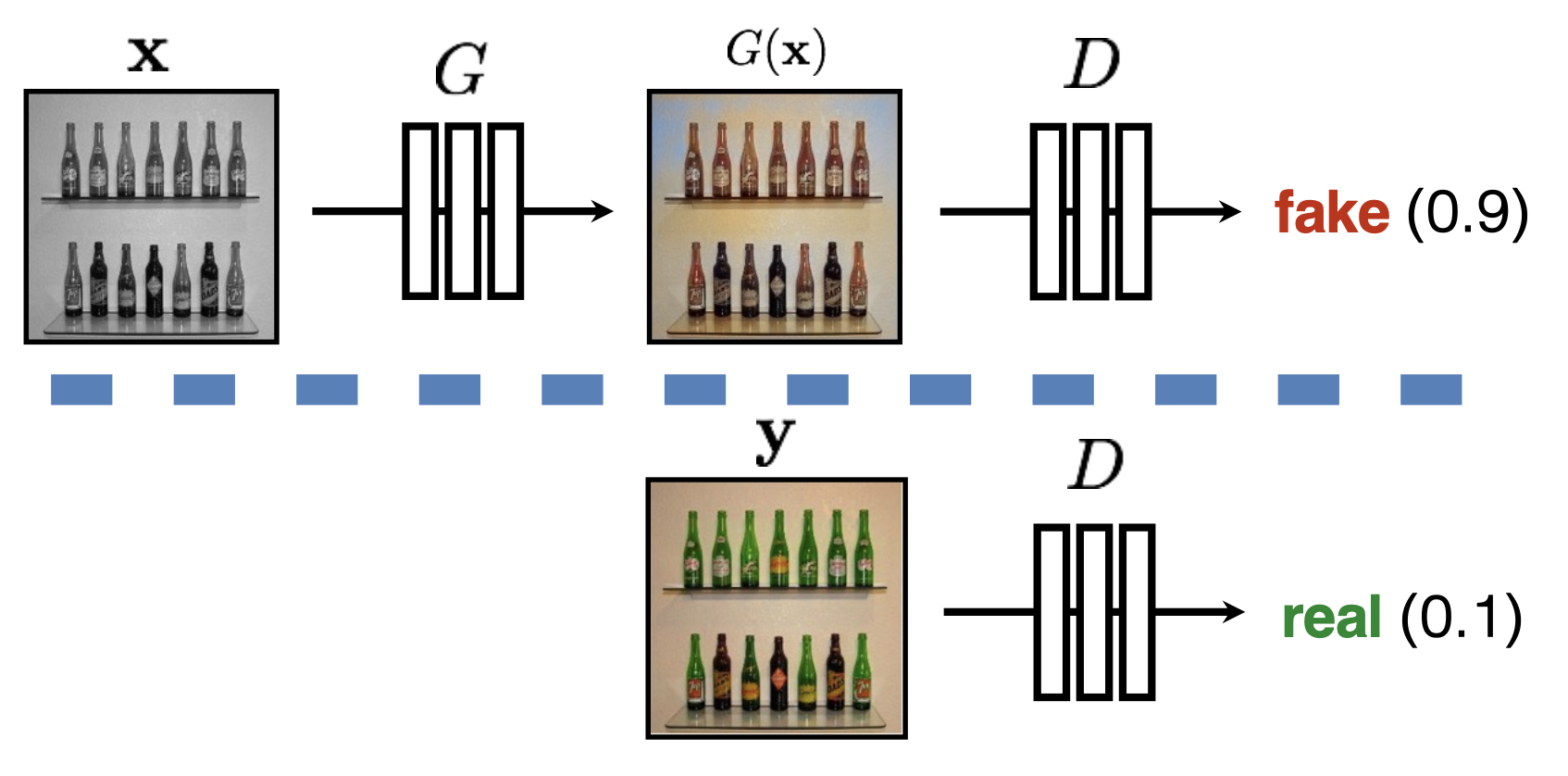
-
G 尝试合成能够欺骗 D 的假图像
- 而且是最好的 D
\[ \arg\min_{G} \max_D \mathbb{E}_{\mathbf{x},\mathbf{y}} \left[ \log D(G(\mathbf{x})) + \log(1 - D(\mathbf{y})) \right] \] -
D 尝试识别出假图像
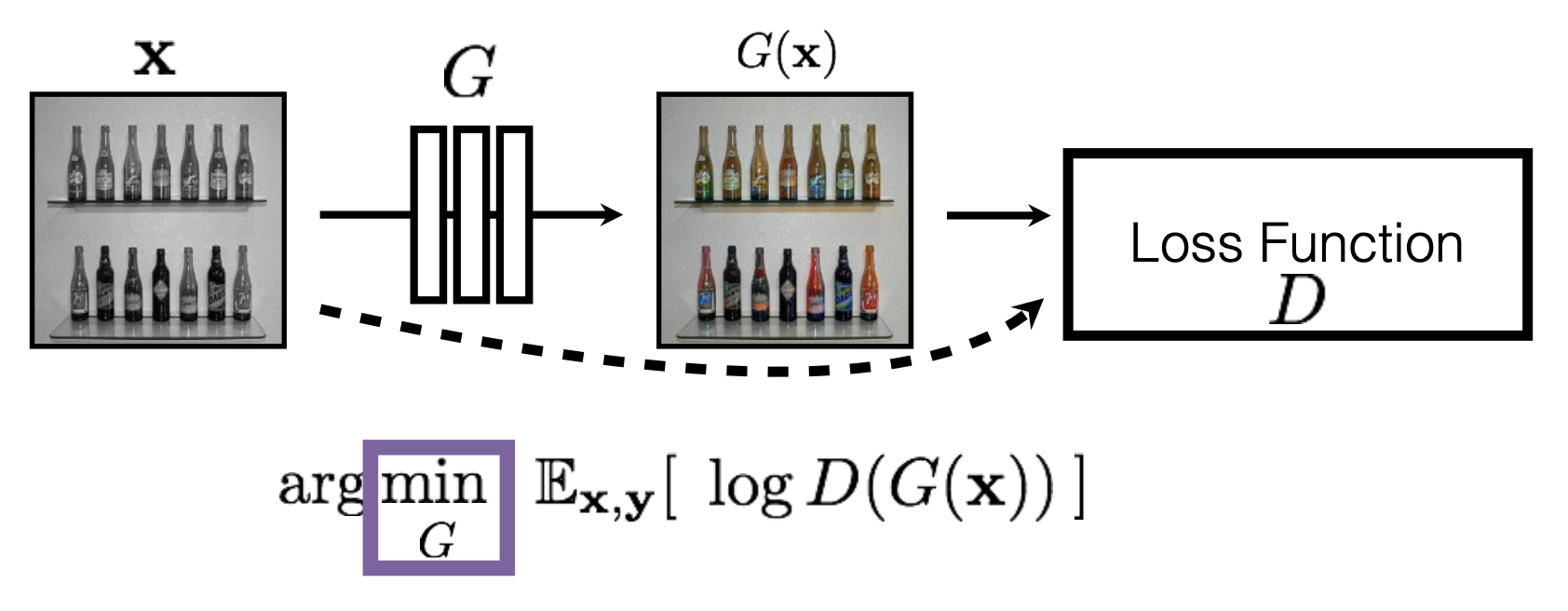
可以把 D 看做用于训练 G 的损失函数
- 称为对抗损失(adversarial loss)
- 通过学习而非手工设计
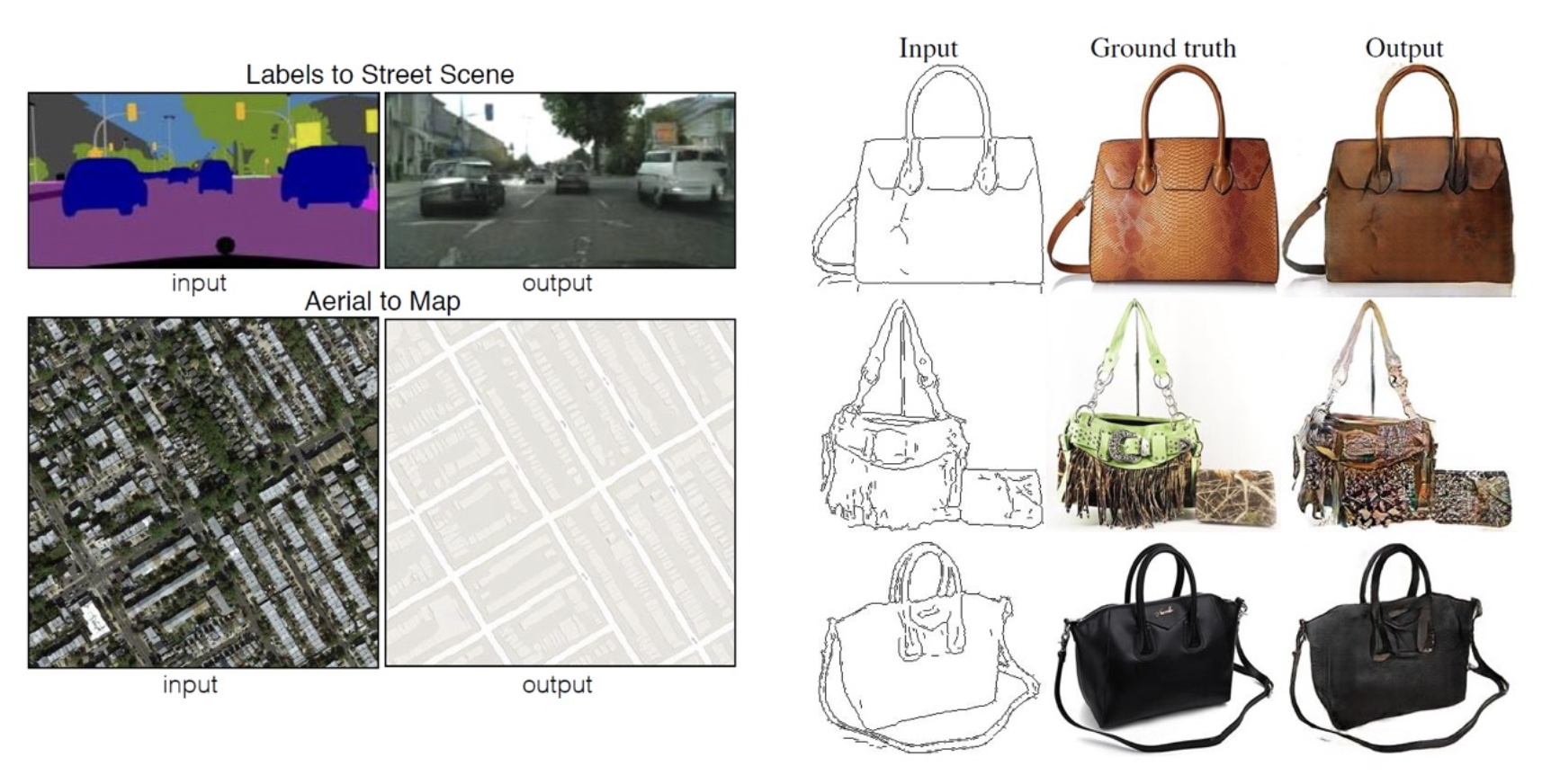
- 可应用于任何图像合成任务
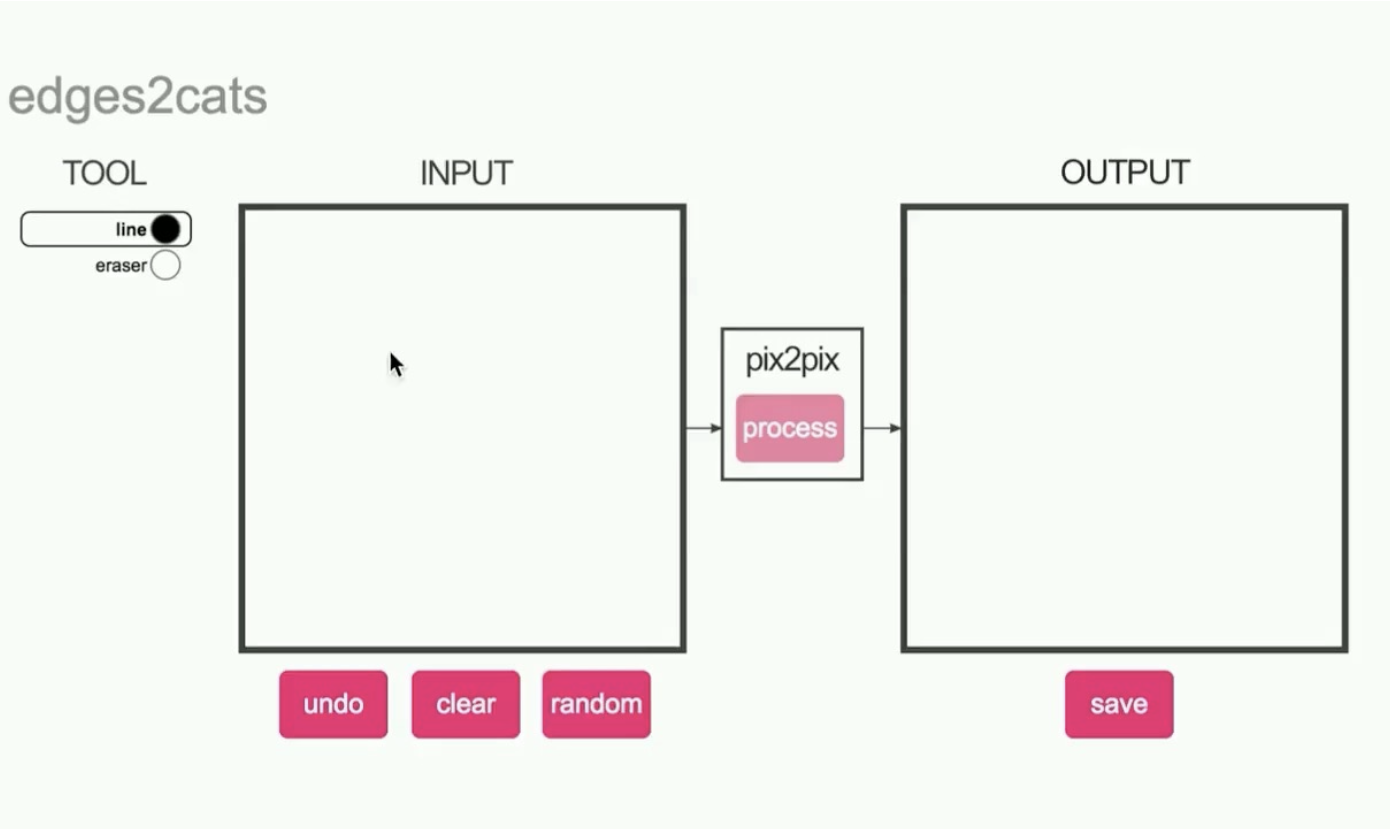
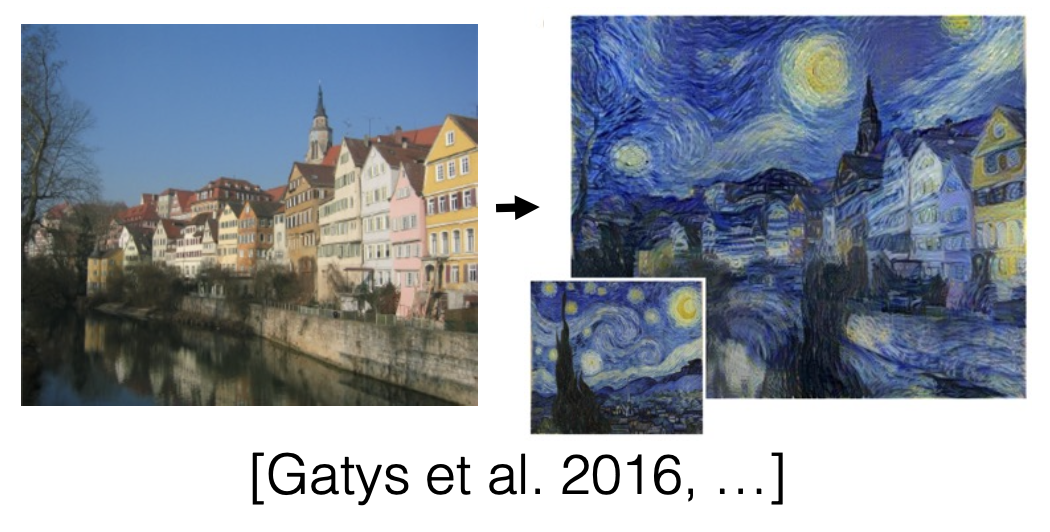
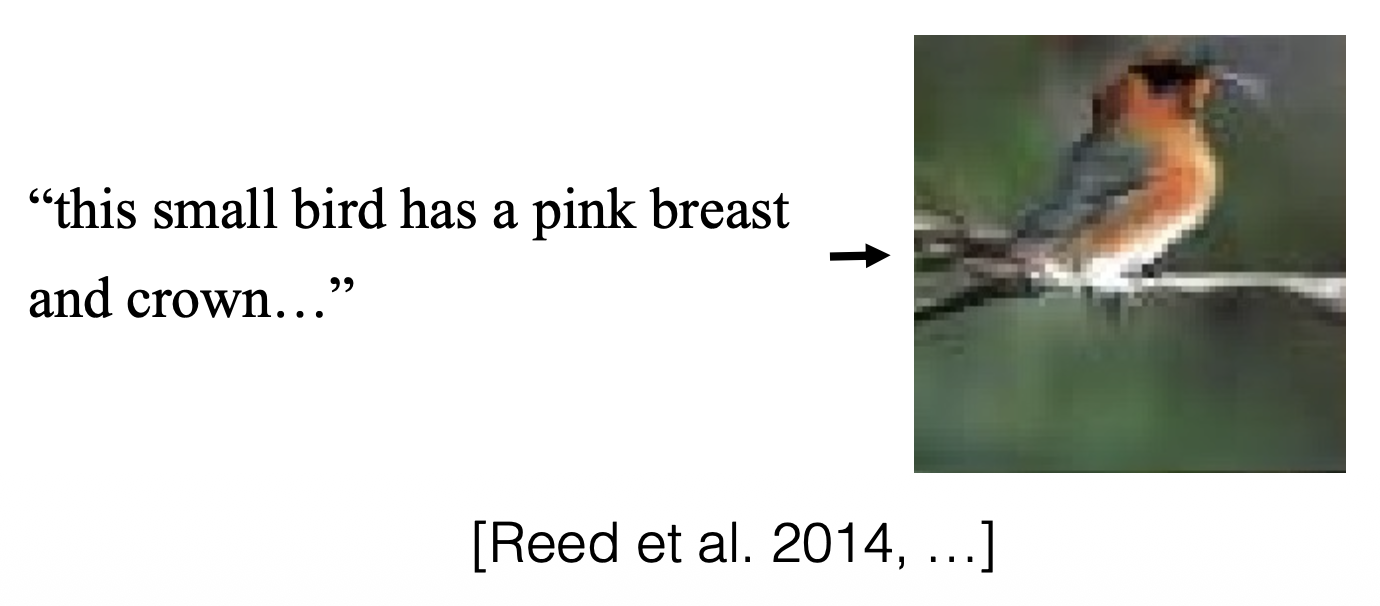
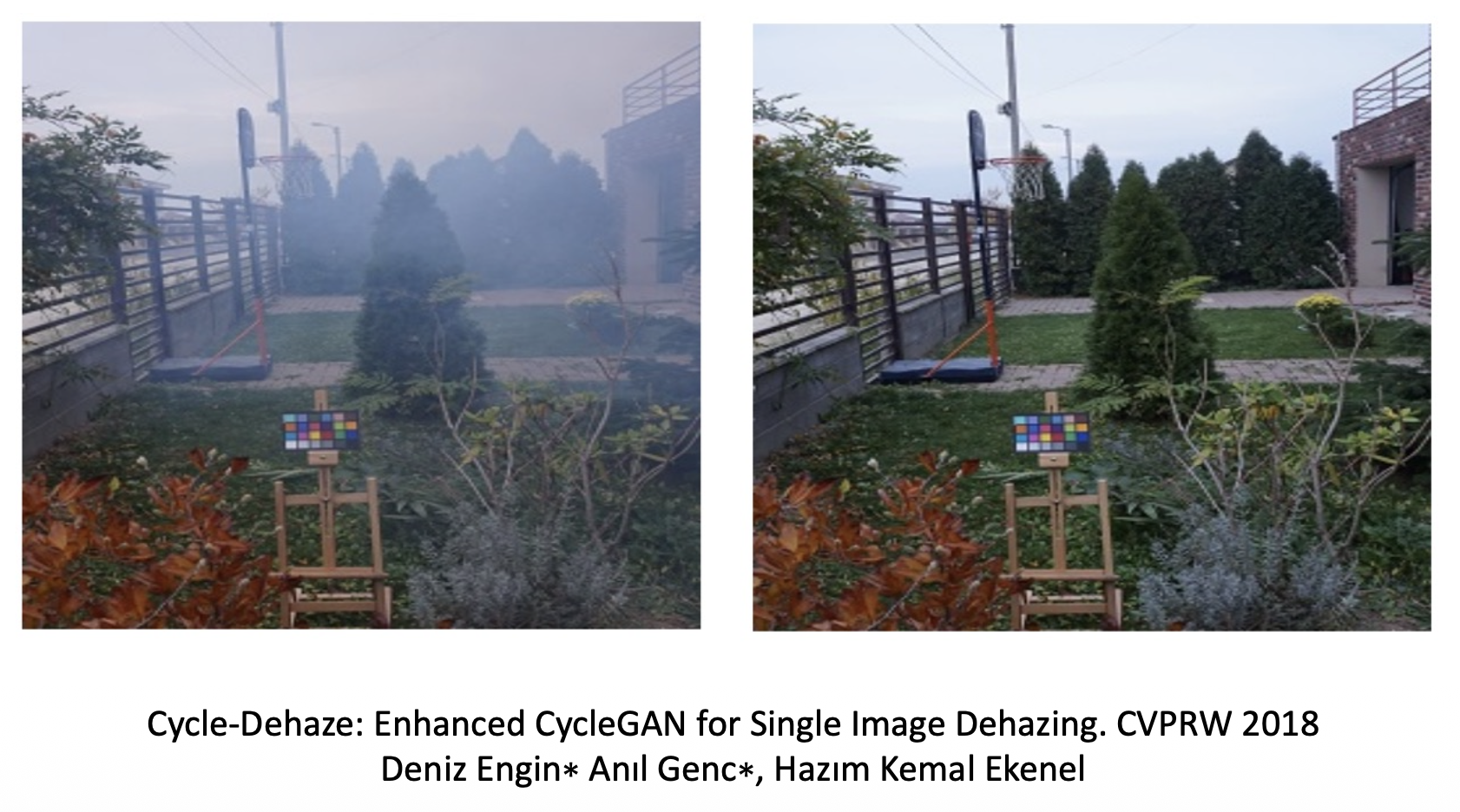
更多的图像合成任务
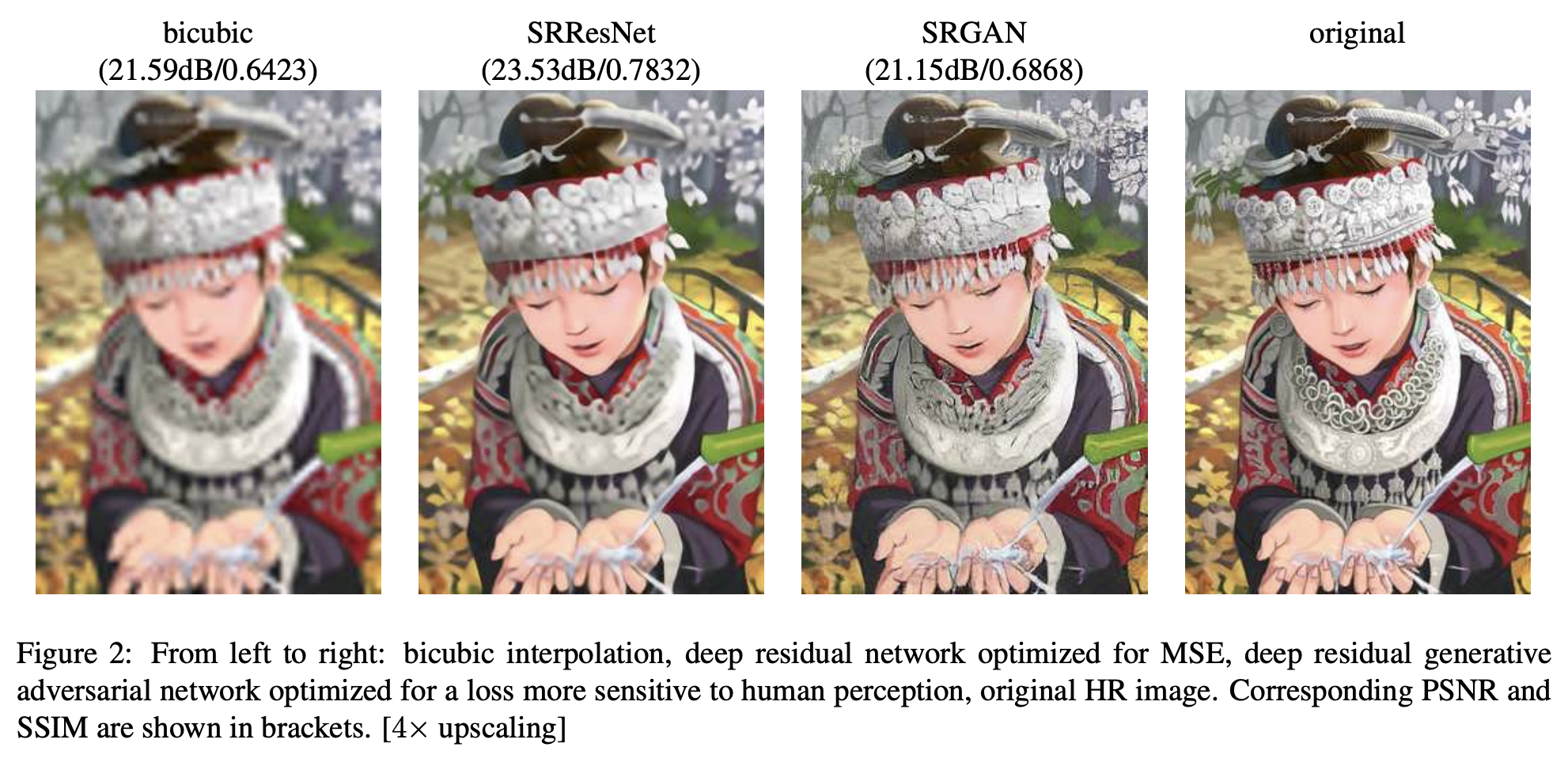
Super Resolution⚓︎
超分辨率(super resolution):

利用 GAN 实现超分辨率:
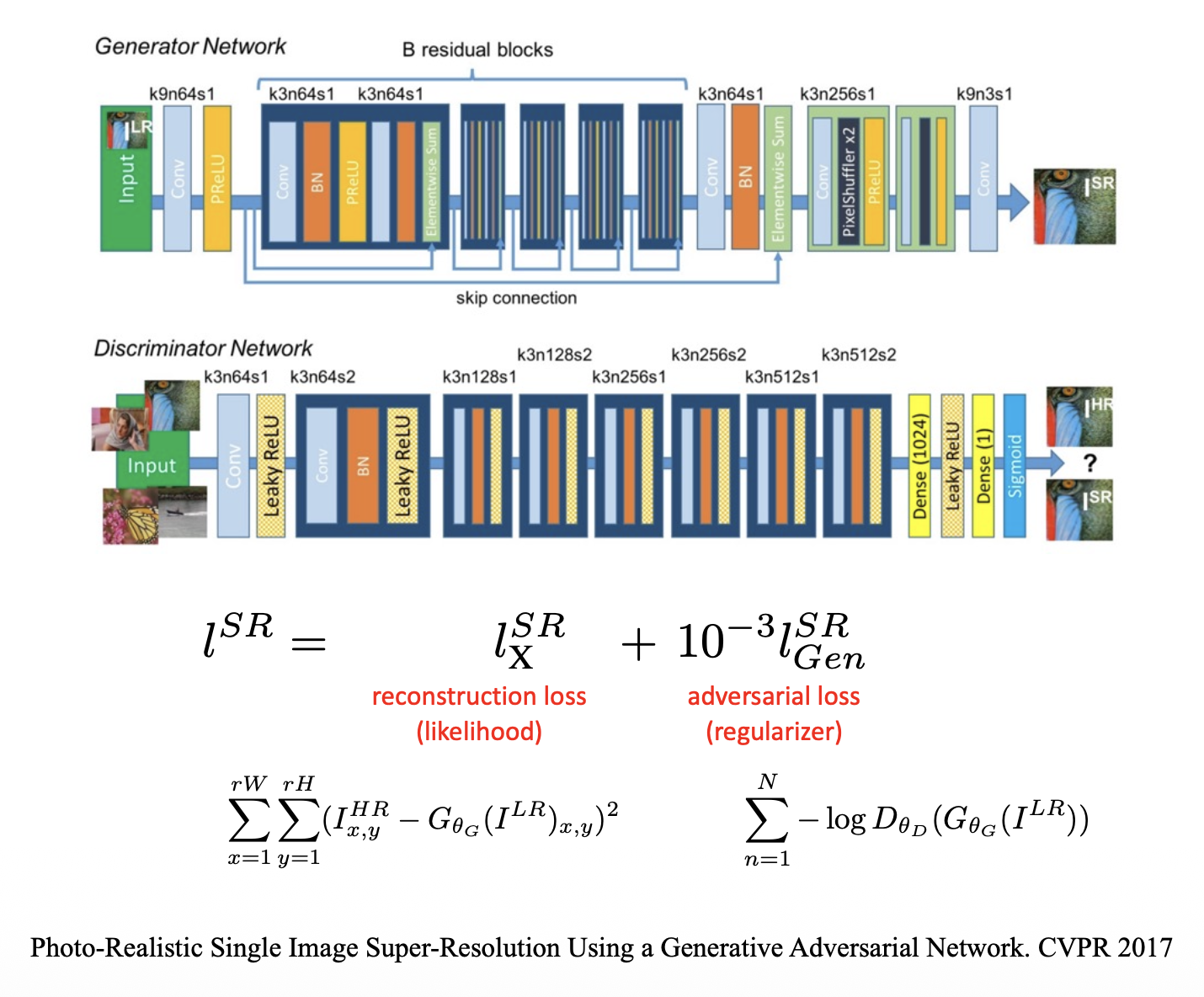
效果:
评论区