Large-Scale Distributed Training⚓︎
约 3232 个字 54 行代码 预计阅读时间 17 分钟
要想训练 GPT-4、Llama 等超级大的模型,往往需要成千上万的 GPUs 才能满足要求。所以,模型在训练时会散布在众多 GPUs 上,于是我们称这样的训练为大规模分布式训练(large-scale distributed learning)。
在理解如何在多张 GPUs 上训练模型之前,我们先来了解一些有关 GPU 的硬件知识。
A Bit about GPU Hardware⚓︎
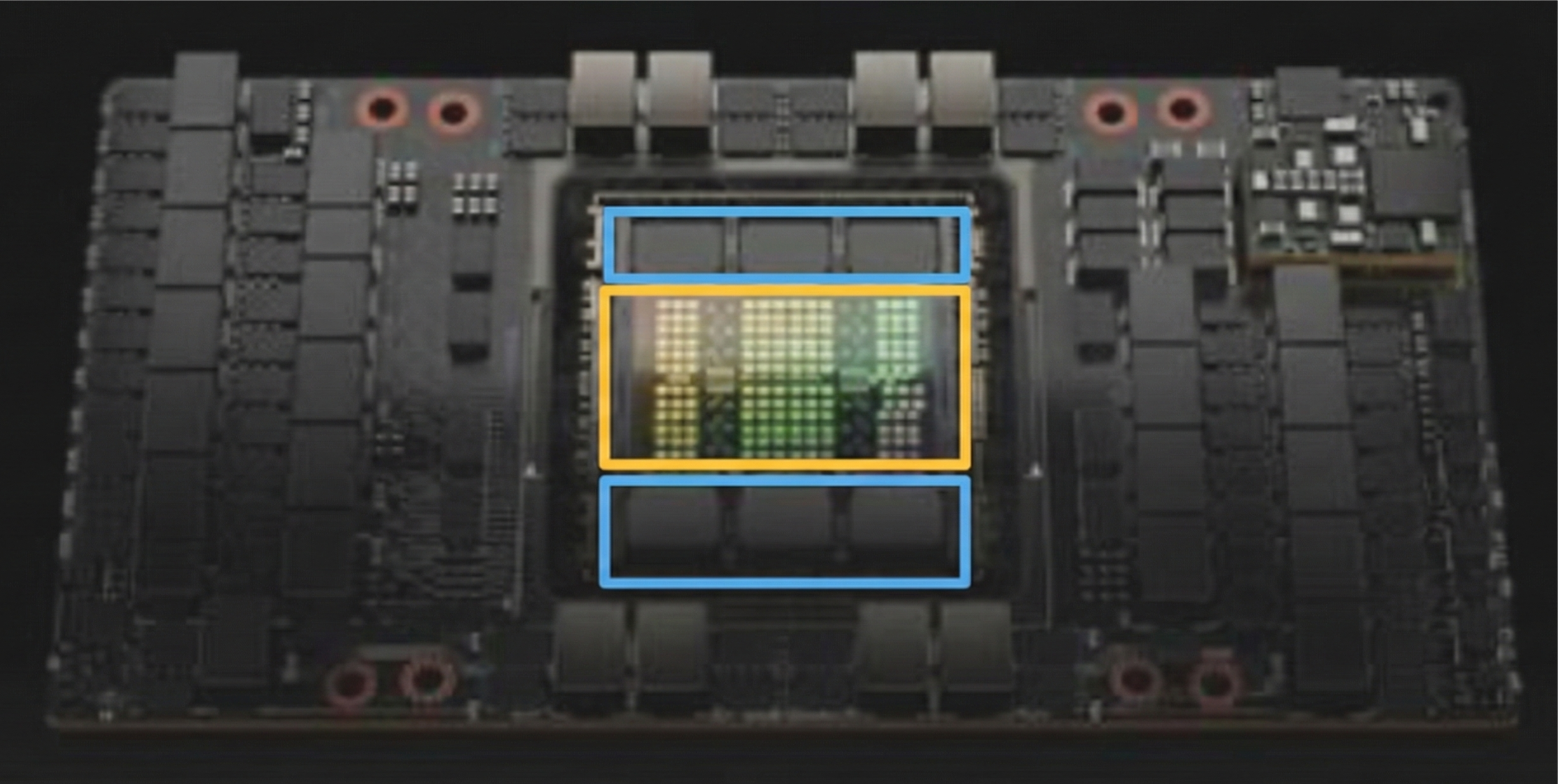
GPU 全称为图形处理单元(graphics processing unit)。顾名思义,它一开始是用于图形学的,不过现在可作为通用的并行处理器使用。它的关键组成部分有(以 Nvidia H100 为例
-
计算核(compute cores)(黄框)

- 50 MB 的 L2 高速缓存(中间的淡绿色框)
-
132 个流式多处理器(streaming multiprocessor, SMs),内含多个独立的并行核(紫框)
- 实际上有 144 个,但由于良率,只有 132 个被启用
- 有点像 CPUs 中支持向量指令的核
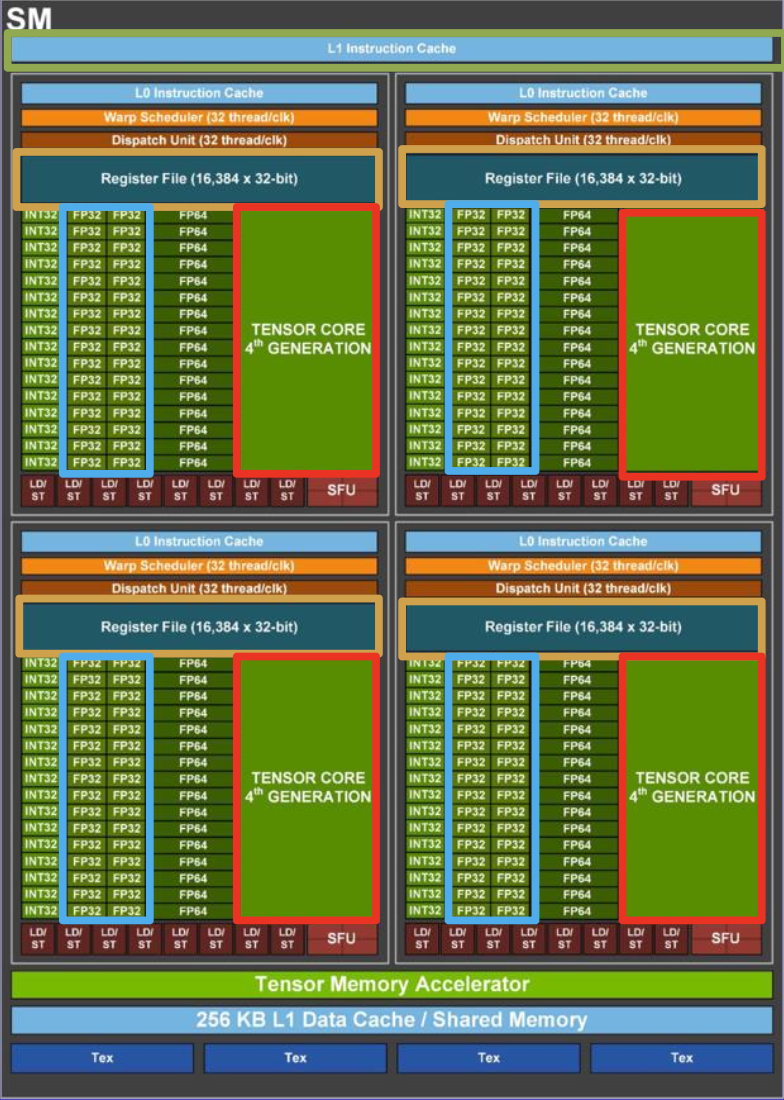
- 256 KB 的 L1 高速缓存(绿框
) ,256 KB 的寄存器(黄框) - 128 个 FP32(32 位浮点数)核(蓝框)
- 每时钟周期计算 ax + b
- 2 FLOPs(floating point operations)
- 每个 SM 在每时钟周期执行 256 FLOPs
- 4 个张量核(红框)
- 每时钟周期计算 AX + B
- 矩阵运算:[16x4][4x8] + [16x8] = 16*4*8*2 = 1024 FLOPs
- 每个 SM 在每时钟周期执行 4096 FLOPs
- 混合精度:16 位 / 32 位
-
80GB 的 HBM(高带宽,3352 GB/s)内存(蓝框)
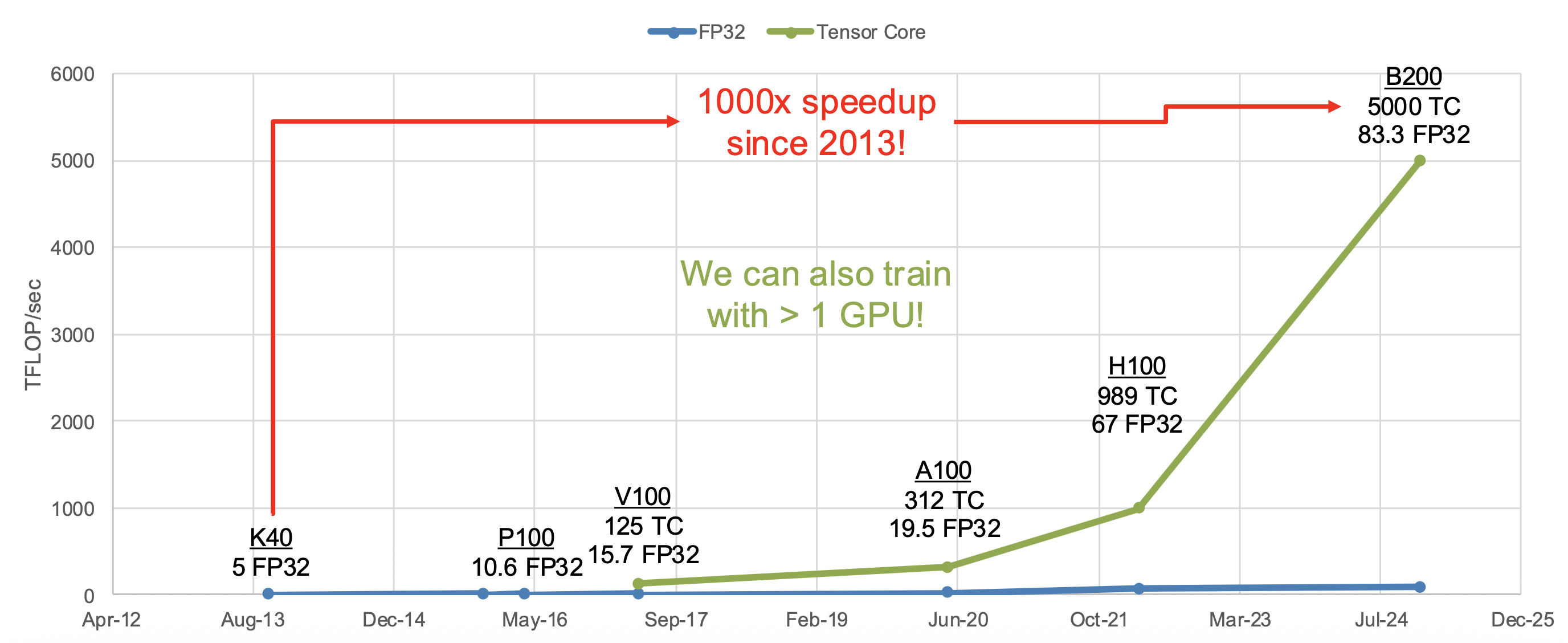
近十几年 GPUs 的发展速度超级快!
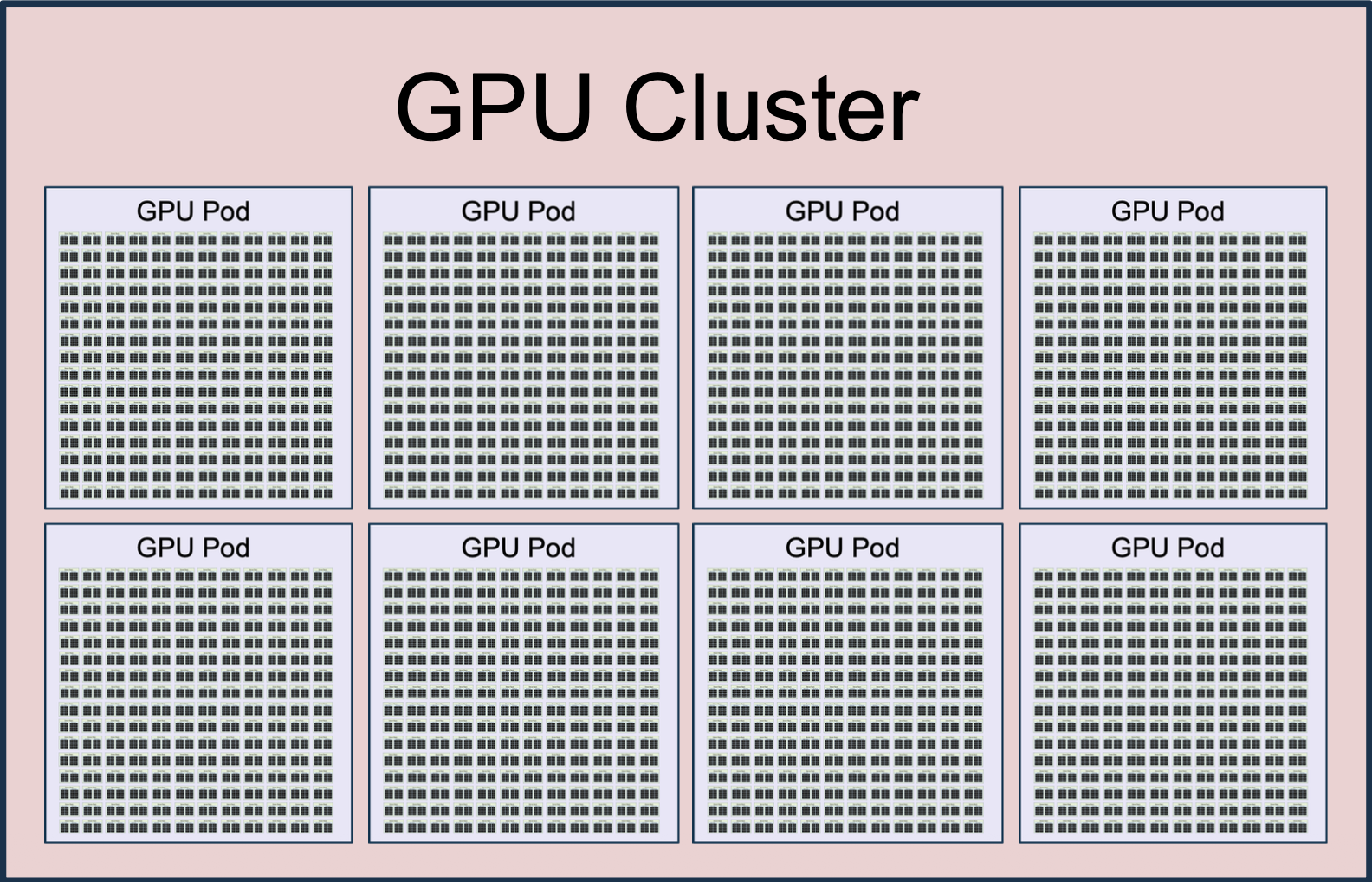
既然有成千上万个 GPUs,那就很有必要将它们组织起来。以下是 Llama 3 时采用的 GPU 架构:
- H100 GPU:GPU 内部带宽为 3352 GB/s
- 服务器(server) = 8x GPU,GPUs 之间的带宽为 900 GB/s
- 机架(rack) = 2 台服务器 = 16 个 GPUs
- 机舱(pod) = 192 个机架 = 3072 个 GPUs,GPUs 之间的带宽为 50 GB/s
- 集群(cluster) = 8 个机舱 = 24,576 个 GPUs,GPUs 之间的带宽小于 50 GB/s
总的统计信息:
- 24,576 个 GPUs
- 1.875 PB GPU 内存
- 415M FP32 核
- 13M 张量核
- 24.3 EFLOP/s = 24.3 x 1018 FLOP/s
整个 Llama 神经网络需要在这么大一个集群内训练!
来看看其他例子:
-
Google 的张量处理单元(tersonr processing units, TPUs)

- 由 Google 个性化设计
- TPU v5p:
- 每个芯片执行 BF16 运算的速度为 459 TFLOP/s
- 每个芯片有 96 GB 的内存
- 一个机舱内排布了 8960 个芯片
-
AMD MI325X
- 执行 BF16 运算的速度为 1300 TFLOP/s
- 256 GB 内存
-
AWS Trainium2
- 执行 BF16 运算的速度为 667 TFLOP/s
- 96 GB 内存
- 超服务器 (UltraServer) 内包含 64 个这样的芯片
How to Train on Lots of GPUs⚓︎
假设:一个具有 L 层的模型在形状为 (Batch, Sequence, Dim) 的张量上操作。
由于是在多个 GPUs 上进行训练,因此可以考虑采用不同的并行策略,包括:
- 数据并行(data parallelism):按批量 (batch) 维度划分
- 上下文并行(context parallelism):按序列 (sequence) 维度划分
- 流水线并行(pipeline parallelism):按层数(L)维度划分
- 张量并行(tensor parallelism):按 Dim 维度划分
Data Parallelism⚓︎
回忆一下:损失通常是在 N 个样例的小批量 (minibatch) 上进行平均值计算。数据并行的思路便是使用 MN 个样例的小批量,并且划分到 M 个 GPUs 上。
由于梯度是线性的,所以每个 GPU 可计算自己的梯度:
-
每个 GPU 计算在 N 个样例上的梯度
\[ L = \dfrac{1}{MN} \sum_{i=1}^M \sum_{j=1}^N l(x_{i, j}, W) \] -
计算 M 个 GPUs 上的平均梯度
\[ \dfrac{\partial L}{\partial W} = \dfrac{1}{M} \sum_{i=1}^M \left(\frac{1}{N} \sum_{j=1}^N \frac{\partial}{\partial W} l(x_{i, j}, W)\right) \]
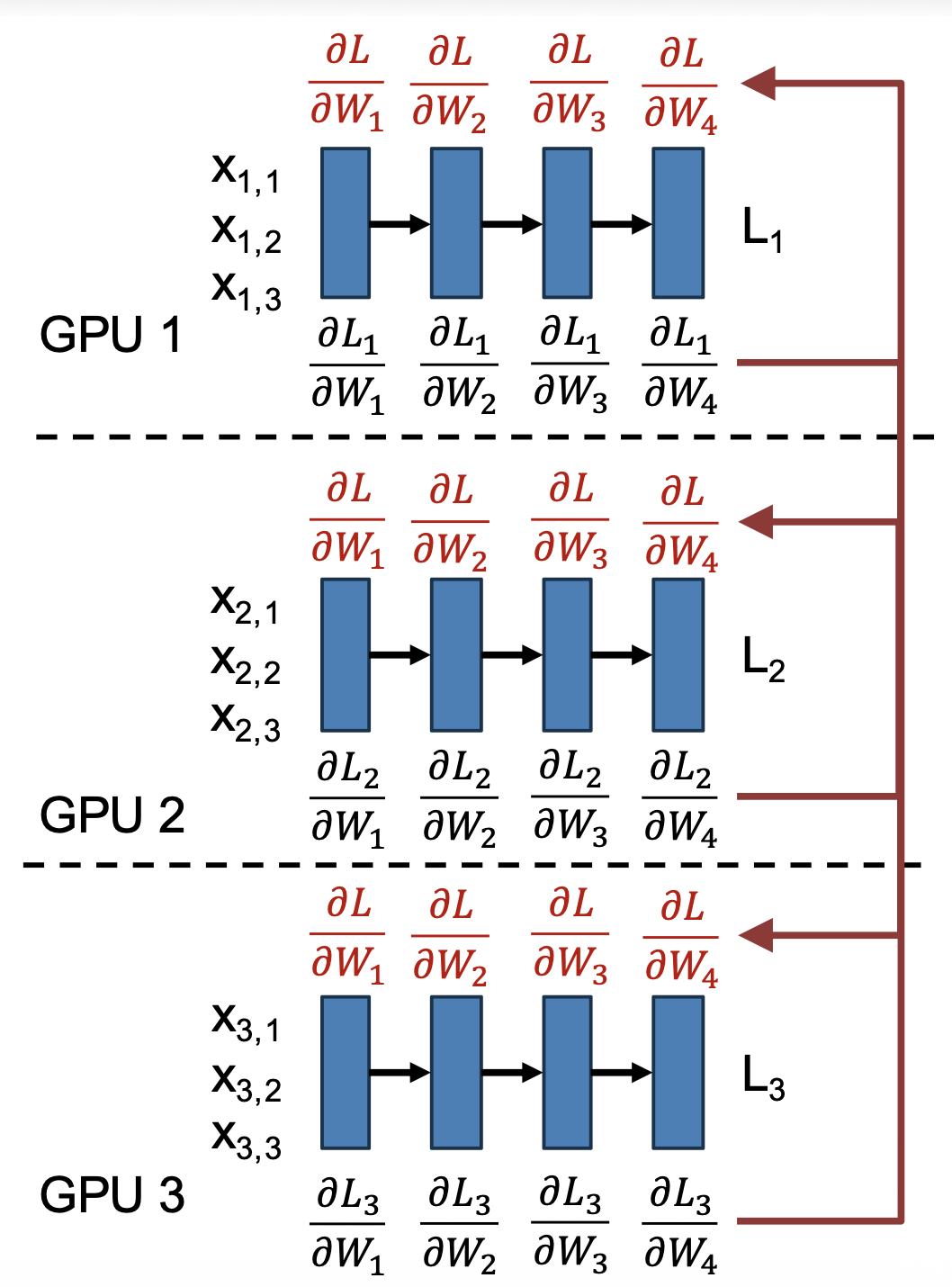
具体步骤如下:
- 每个 GPU 有自己的模型 + 优化器的副本
- 每个 GPU 加载自己批次的数据
- 每个 GPU 正向运行,以计算损失
- 每个 GPU 反向运行,以计算梯度
- 计算所有 GPUs 的平均梯度
- 每个 GPU 更新自己的权重
注意:4, 5 两步可并行运行!
问题
模型大小受限于 GPU 内存:
- 每个权重需要 4 个数字(权重、梯度、Adam 的 \(\beta_1, \beta_2\),每个数字占据 2 字节
- 1B 的参数需要 8GB 空间,10B 参数就能占满 80 GB 的 GPU
解决方案:在多个 GPUs 之间划分模型权重,即下面介绍的方法:全共享数据并行(fully sharded data parallelism, FSDP)。
Fully Sharded Data Parallelism (FSDP)⚓︎
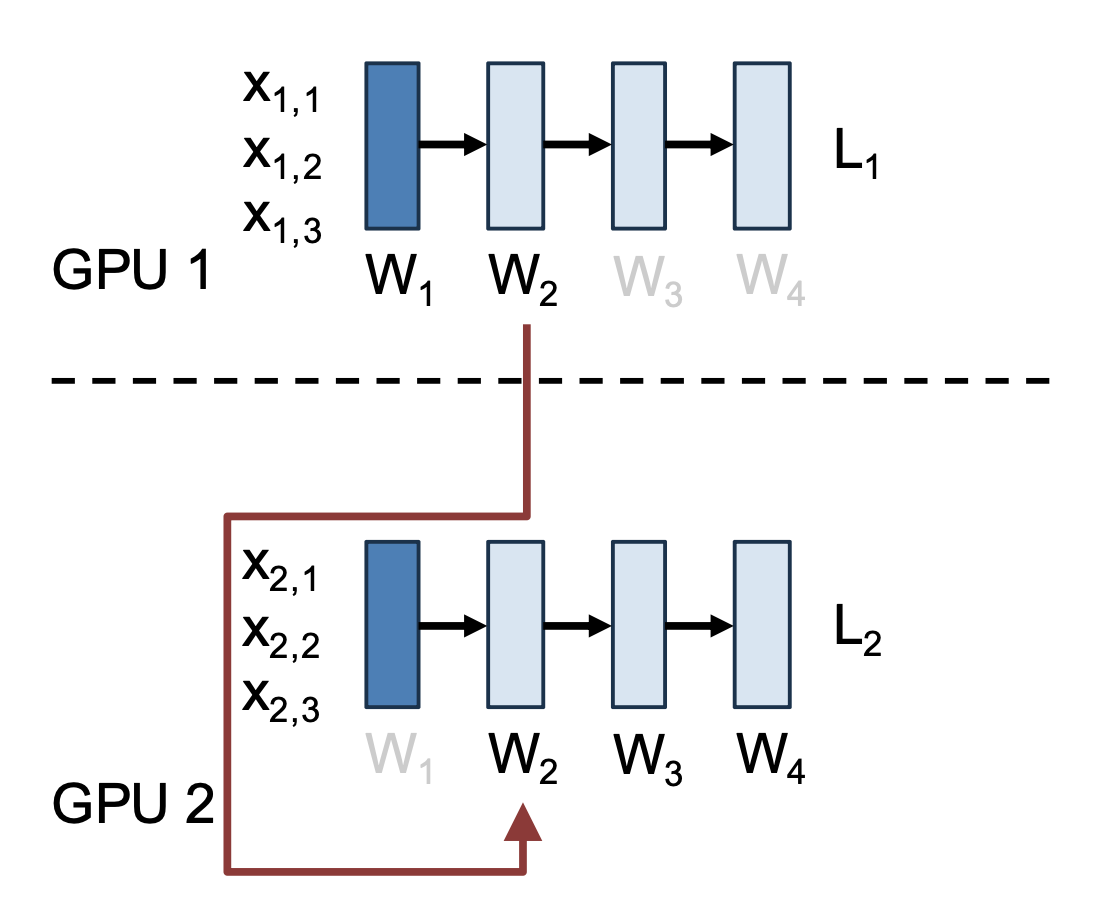
全共享数据并行的具体思路为:每个权重 W i 仅为一个 GPU 所有,同时包含梯度和优化信息。
-
在正向进入第 i 层前,拥有 W i 的 GPU 会将其广播到所有的 GPUs 上

-
所有的 GPU 在第 i 层正向运行,然后删除 W i 的局部副本
注:在使用 W i 正向计算的同时可以获取 W i+1
-
在反向进入第 i 层前,拥有 W i 的 GPU 会将其广播到所有的 GPUs 上
- 优化:在正向计算结束时不要删除最后的权重,以避免之后立马再次发送
-
所有的 GPU 在第 i 层反向运行,计算局部的 \(\dfrac{\partial L}{\partial W_i}\),然后删除 W i 的局部副本
-
在第 i 层反向计算后,所有 GPU 将局部 \(\dfrac{\partial L}{\partial W_i}\) 发送到拥有 W i 的 GPU,并删除自己的 \(\dfrac{\partial L}{\partial W_i}\)

-
W i 的拥有者更新梯度
注:可在计算 W i+1 的同时获取 W i,并且可在发送 \(\dfrac{\partial L}{\partial W_i}\) 并更新 W i 的同时与 W i-1 进行计算。
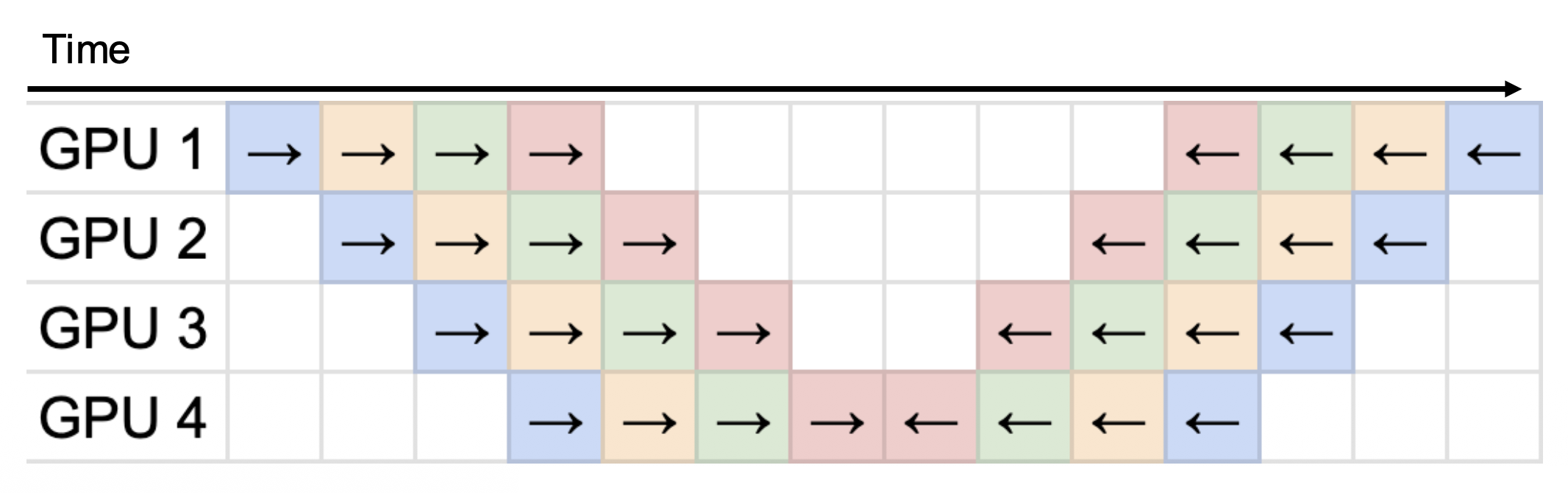
对于上图,以下这些计算可同时发生:
- 发送梯度并更新 W 3
- 在 W 2 上反向运行
- 获取 W 1
Hybrid Sharded Data Parallelism (HSDP)⚓︎
一种更高级的数据并行策略是混合共享数据并行(hybrid shared data parallelism)。
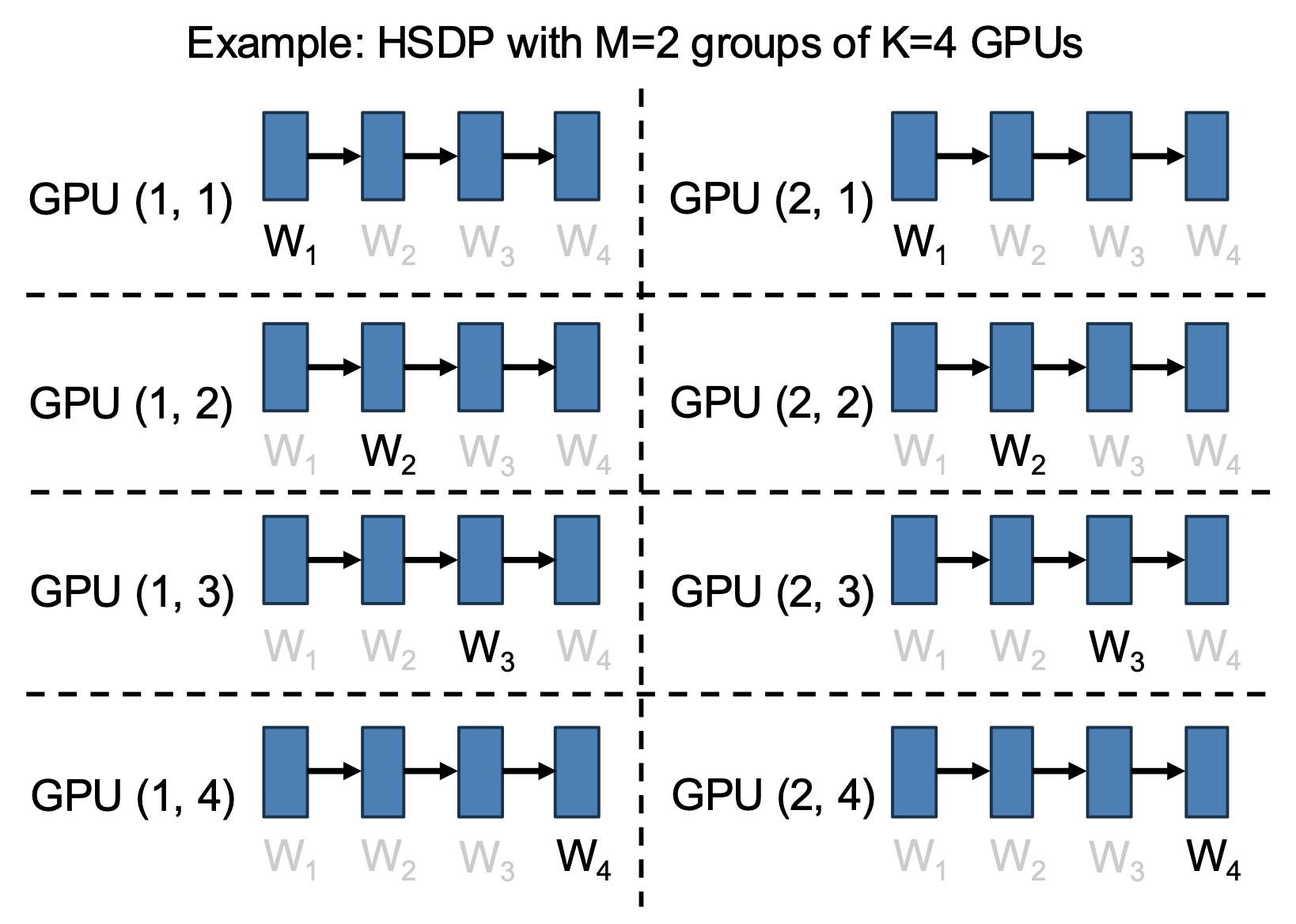
- 将 N = M*K 个 GPUs 划分到 M 个大小为 K 的组中
- 包含 K 个 GPU 的一组执行 FSDP,将模型权重分配到所有 K 个 GPU 上;K 可以是 O(100) 个 GPU
- 在 M 个组上进行数据并行
上述策略反映了多维并行性(multidimensional parallelism):同时使用不同的并行策略,将 GPU 组织成二维网格。
- 组内的 3x 通信:
- 正向:W,反向:W + dL/dW
- 将它们保存在相同的节点 / 机舱内
- 组间的 1x 通信:
- 反向:dL/dW
- 能使用更慢的通信手段
通过 FSDP 和 HSDP,我们解决了因 GPU 内存限制模型参数量的问题:假如要训练一个 100B 的大模型
- 原本需要 800GB 的 GPU 内存
- 现在分摊到 80 个 GPU 上,每个 GPU 只需 10 GB 内存就行了
新的问题
模型激活可能会占用内存。
- Llama3-405B Transformer 有 126 层,D=16,384,序列长度 4096
- 仅 FFN 隐藏激活就需要 2*126*(4*16384)*4096 B = 63GB
- 另外还有其他的激活
解决方案:不要在内存中保留所有的激活,运行时重新计算。
Activation Checkpointing⚓︎
上述方案的具体实现叫做激活检查点(activation checkpointing)。具体思路为:网络中的一个层包含两个函数,分别是:
-
正向:计算下一层的激活
\[ A_{i+1} = F_i^\rightarrow (A_i) \] -
反向:计算上一层的梯度
\[ G_i = F_i^\leftarrow (A_i, G_{i+1}) \]
思考
假设 \(F_i^\rightarrow, F_i^\leftarrow\) 的时间和空间复杂度均为 \(O(1)\),那么总的时间和空间复杂度是多少呢?
- 时间复杂度:\(O(N)\)
- 空间复杂度:\(O(N)\)
思路:在反向传递阶段重新计算激活。
- 时间复杂度:\(O(N^2)\)
- 空间复杂度:\(O(1)\)

问题:\(O(N^2)\) 的时间复杂度太糟糕了!
思路:不要重新计算所有东西;每 C 层保存一个检查点。
- 时间复杂度:\(O(N^2 / C)\)
- 空间复杂度:\(O(C)\)
- 时间复杂度:\(O(N \sqrt{N})\)
- 空间复杂度:\(O(\sqrt{N})\)
将 HSDP 和激活检查点方法相结合,我们得到了一套不错的训练方法,其步骤为:
- 使用多达约 128 个 GPU,以及约 1B 参数量的模型
- 始终将每个 GPU 批次大小设置得尽可能大,以最大限度地利用 GPU 的内存
- 若模型参数量 > 1B,考虑用 FSDP
- 增加激活检查点以适配 GPU 更大的批次
- 若有 >256 个 GPUs,考虑用 HSDP
- 若有 >1K 个 GPUs,>50B 参数量的模型或序列长度 > 16K,那么采用更高级的策略(CP, PP, TP)
可以看到,这些步骤中有好多可以调优的地方,那么该怎么设置它们呢?答案是最大化模型浮点运算利用率(model FLOP utilization, MFU)。
Hardware FLOPs Utilization (HFU)⚓︎
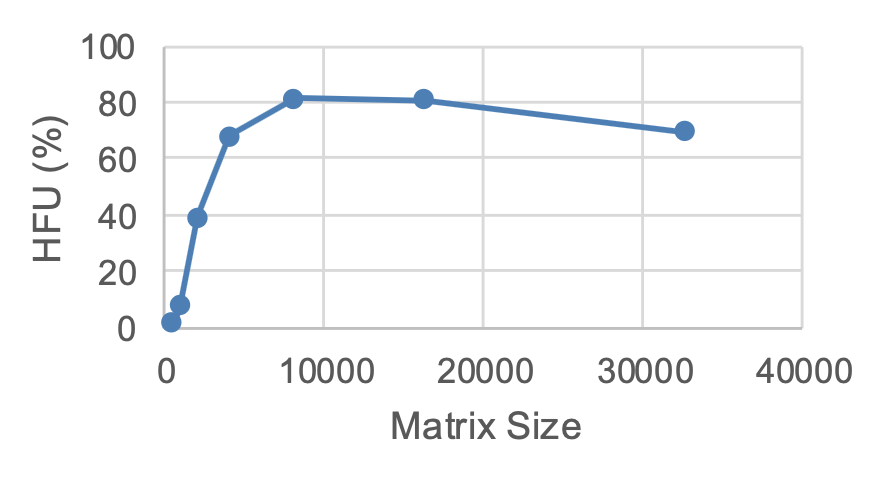
理论上,H100 能在张量核上以 989.4 TFLOP/s 的速度完成 16 位的矩阵乘法。实际上能看到的吞吐量可以用硬件浮点运算利用率(hardware FLOP utilization, HFU) 来衡量,它表示实际能到达的理论矩阵乘法性能的比例。
以下代码可作为用于最佳情况的基准测试(仅考虑矩阵乘法
h100_tflop_per_sec = 989.4
sizes = [512, 1024, 2048, 4096,
8192, 16_384, 32_768]
for N in sizes:
x = torch.rand(N, N, device="cuda"
dtype=torch.bfloat16)
flops = 2 * N * N * N
times = []
for i in range(12):
tO = time.time()
y = x @ x
if i > 2:
times.append(time.time() - t0)
sec = np.mean(times)
tflops_per_sec = flops / sec / 10**12
hfu = 100 * tflops_per_sec / h100_tflop_per_sec
print(f"N: {N}, "
f"TFLOP/sec: {tflops_per_sec: 2f}, "
f"HFU: {hfu: .2f}%"
)
注:运行此命令时请设置
CUDA_LAUNCH_BLOCKING=1,否则 GPU 内核将异步启动,导致测量结果不正确。
在 H100 上运行此代码,发现在大矩阵乘法上取得约 80% 的 HFU。
问题
HFD 并没有考虑激活检查点,或者像数据增强、优化器、预处理等辅助计算。
Model FLOPs Utilization (MFU)⚓︎
所以我们引入了“模型浮点运算利用率”这一指标。它衡量了用于有效模型计算的 GPU 理论峰值 FLOPs 的比例。
- 计算 FLOP theoretical = 在正向和反向传递阶段中矩阵乘法的 FLOPs 的总数
- 反向 ≈ 2x 正向
- 忽略非线性、归一化和像残差等的逐元素运算,因为它们在 FP32 核上运行
- 查找 FLOP/sec theoretical = 理论的设备最大吞吐量(H100:989 TFLOP/sec)
- 计算 t theoretical = FLOP theoretical / FLOP/sec theoretical
- 测量 t actual = 关于数据加载、正向、反向、优化的一次完整迭代所需的实际时间
- MFU = ttheoretical / tactual
例子
较宽的 MLP 使用较大的批量大小能在 H100 上获得约 49% 的 MFU。
L, D, N = 8, 8192, 8192
flop_fwd = N * L * 2 * D * D
flop_bwd = 2 * flop_fwd
flop_theoretical = flop_fwd + flop_bwd
t_theoretical = flop_theoretical / (989.4 * 10 ** 12)
layers = []
for _ in range(L):
layers += [torch.nn.Linear(D, D), torch.nn.ReLU()]
model = torch.nn.Sequential(*layers).cuda()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
for _ in range(20):
torch.cuda.synchronize()
t0 = time.time()
X = torch.randn(
N, D, device="cuda",
dtype=torch.float32
)
with torch.autocast(
device_type="cuda",
dtype=torch.bfloat16,
):
y = model(X)
loss = ((X - y) ** 2.0).sum()
loss.backward()
optimizer.step()
optimizer.zero_grad()
torch.cuda.synchronize()
t_actual = time.time() - t0
mfu = t_theoretical / t_actual
print(f"MFU:{100*mfu:.2f}%")
优化分布式训练的目标就是最大化 MFU。实际上,当 MFU > 30%,说明效果已经不错了;当 MFU > 40%,说明表现非常优秀。

然而,更现代的设备有时会出现更差的 MFU,这是因为它们的峰值 FLOPs 增长速度远快于它们的内存带宽。
- 比如:A100 => H100,3.1x FLOPs,2.1x 内存带宽
Context Parallelism⚓︎
第二种并行策略是上下文并行,它通常用在 Transformer 上。
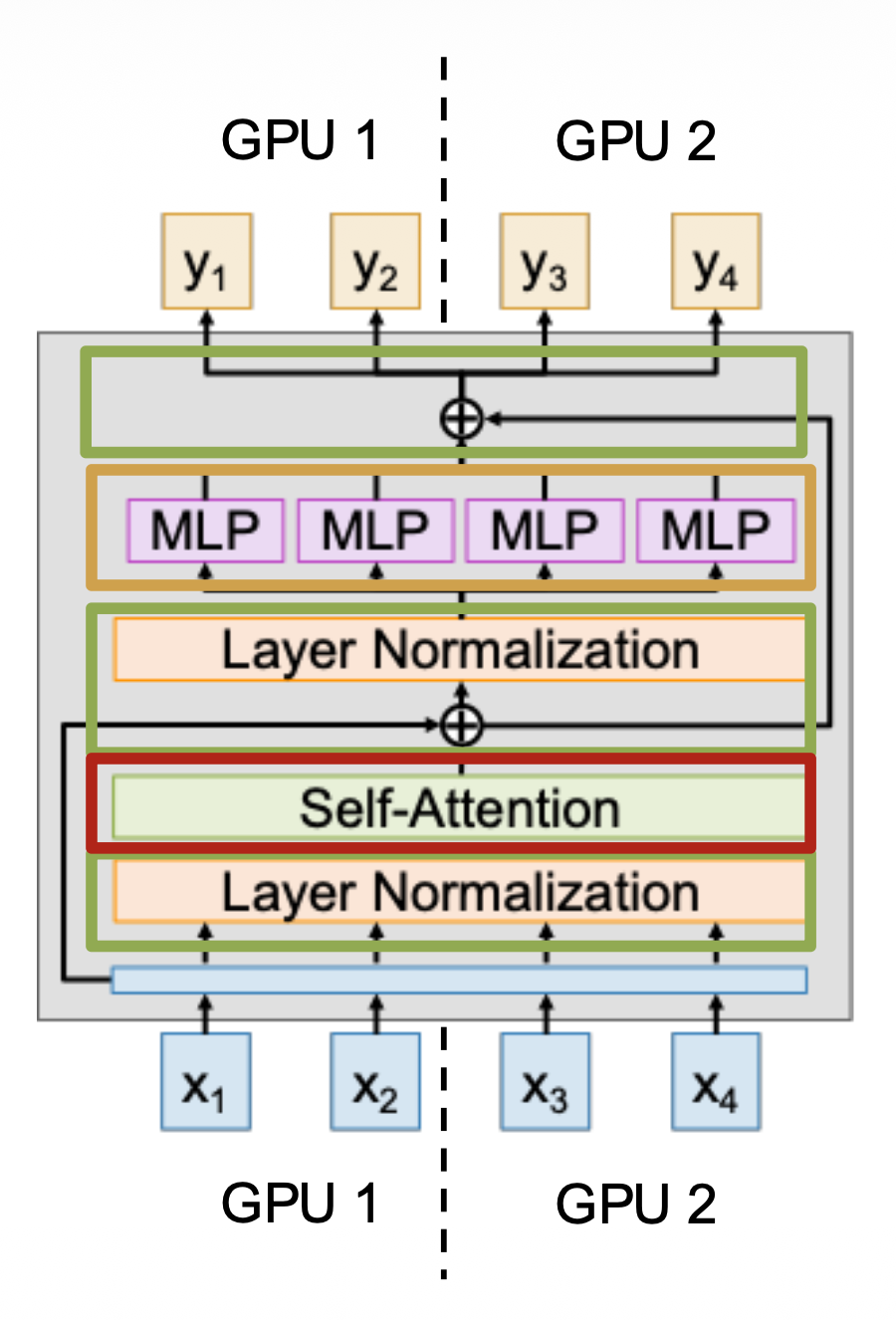
- 思路:Transformer 在长为 L 的序列上运行,使用多个 GPU 来处理单个长序列
- 正则化、残差连接:它们没有权重,因此很容易并行化
- MLP:并行化简单,但有权重;每个 GPU 需要保留一份权重的副本,并且要像在 DP 那样和梯度通信
- 注意力:更加复杂,需要深挖
- QKV 投影:和 MLP 一样,在序列上并行化,并和梯度同步
-
注意力算子:难以并行化,解决方法有:
-
环注意力(ring attention):
- 将数据分成块,并在 GPU 上分配
- 内循环遍历键 / 值,外循环遍历查询
- 实现复杂,但可扩展到非常长的序列
-
Ulysses:
- 不要尝试分配注意力矩阵,而是并行处理多头注意力中的头部
- 更简单,但最大并行度 = 头部数量
-
例子
Llama3-405B 的训练:
- 阶段 1:S=8192,无上下文并行
- 阶段 2:S=131072,16 路上下文并行(每个 GPU 分配到长为 8192 的序列)
Pipeline Parallelism⚓︎
第三种并行策略是流水线并行,其思路是在 GPU 之间拆分模型的层,并在 GPU 边界之间复制激活。
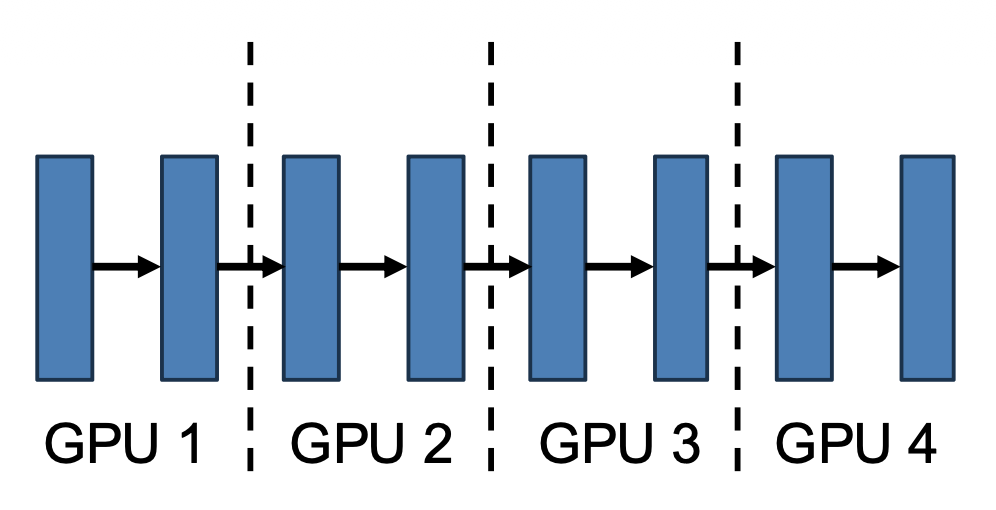
问题
顺序依赖,导致大多数 GPU 处于空闲状态。N 路流水线并行的最大 MFU 是 1/N。
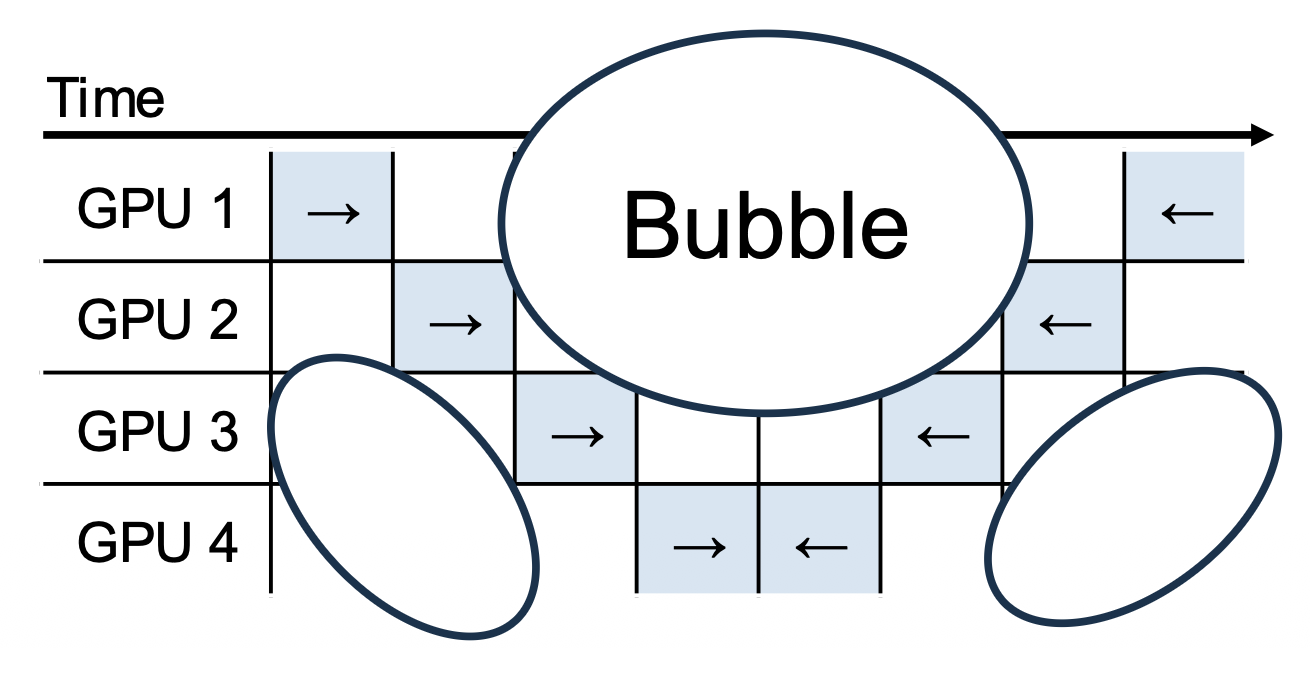
解决方法是同时运行多个微批次(microbatches),通过 GPU 进行流水线处理。
例子
4 路流水线并行,有 4 个微批次。最大 MFU 从 1/4 = 25% 增长至 16/28 ≈ 57.1%
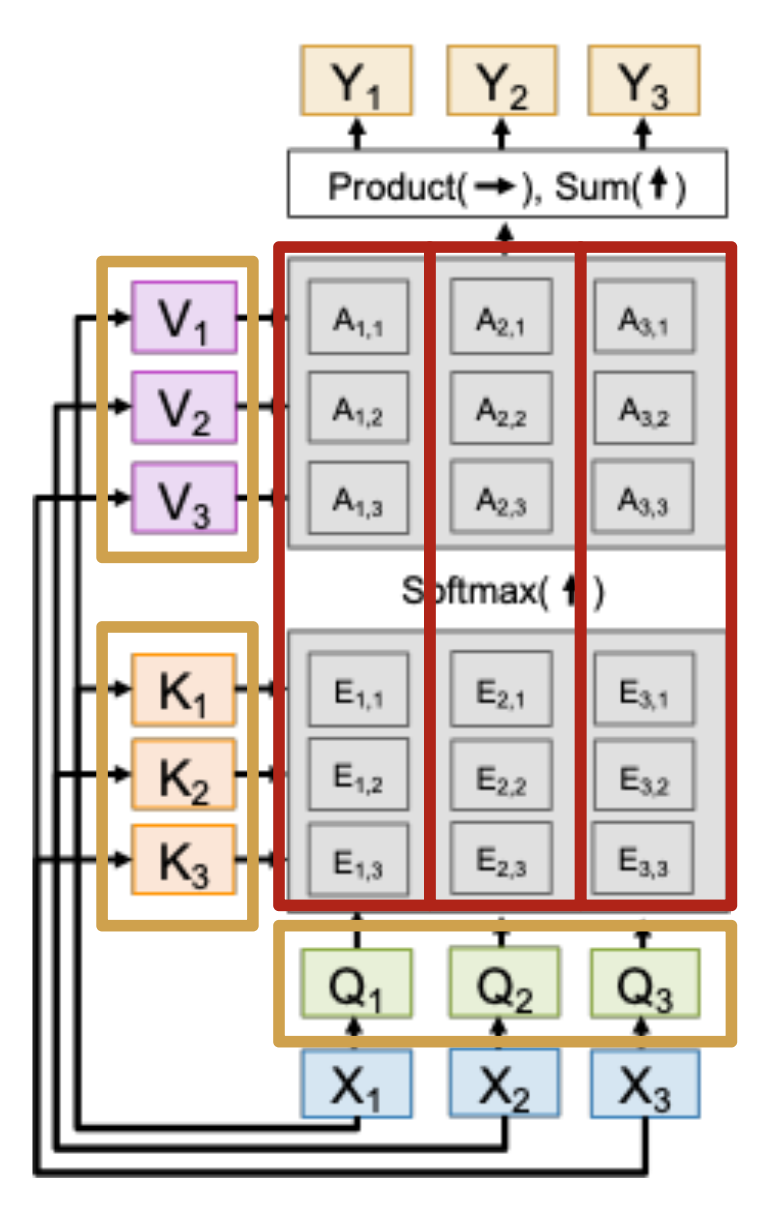
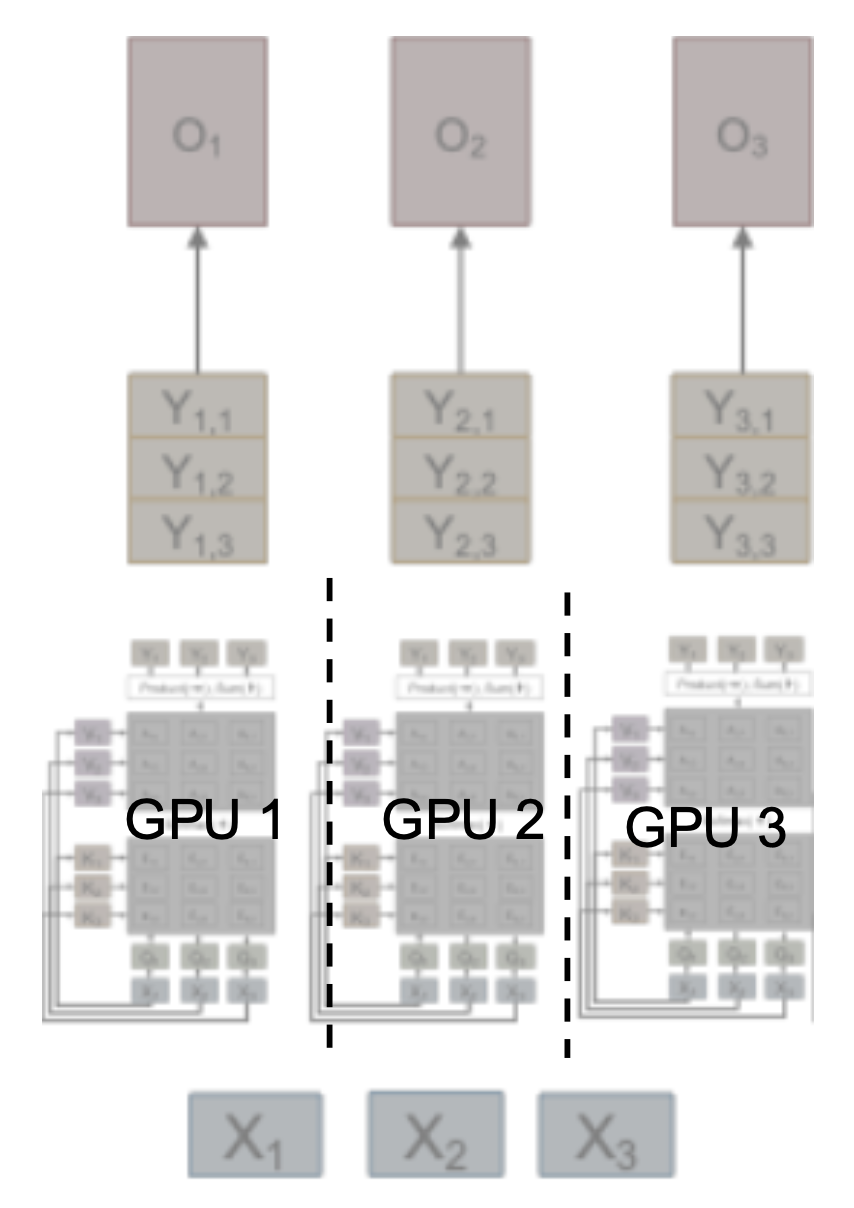
Tensor Parallelism⚓︎
最后一种要介绍的并行策略为张量并行,其思路是将每个线性层的权重分配到 GPU 上,并使用块矩阵乘法。
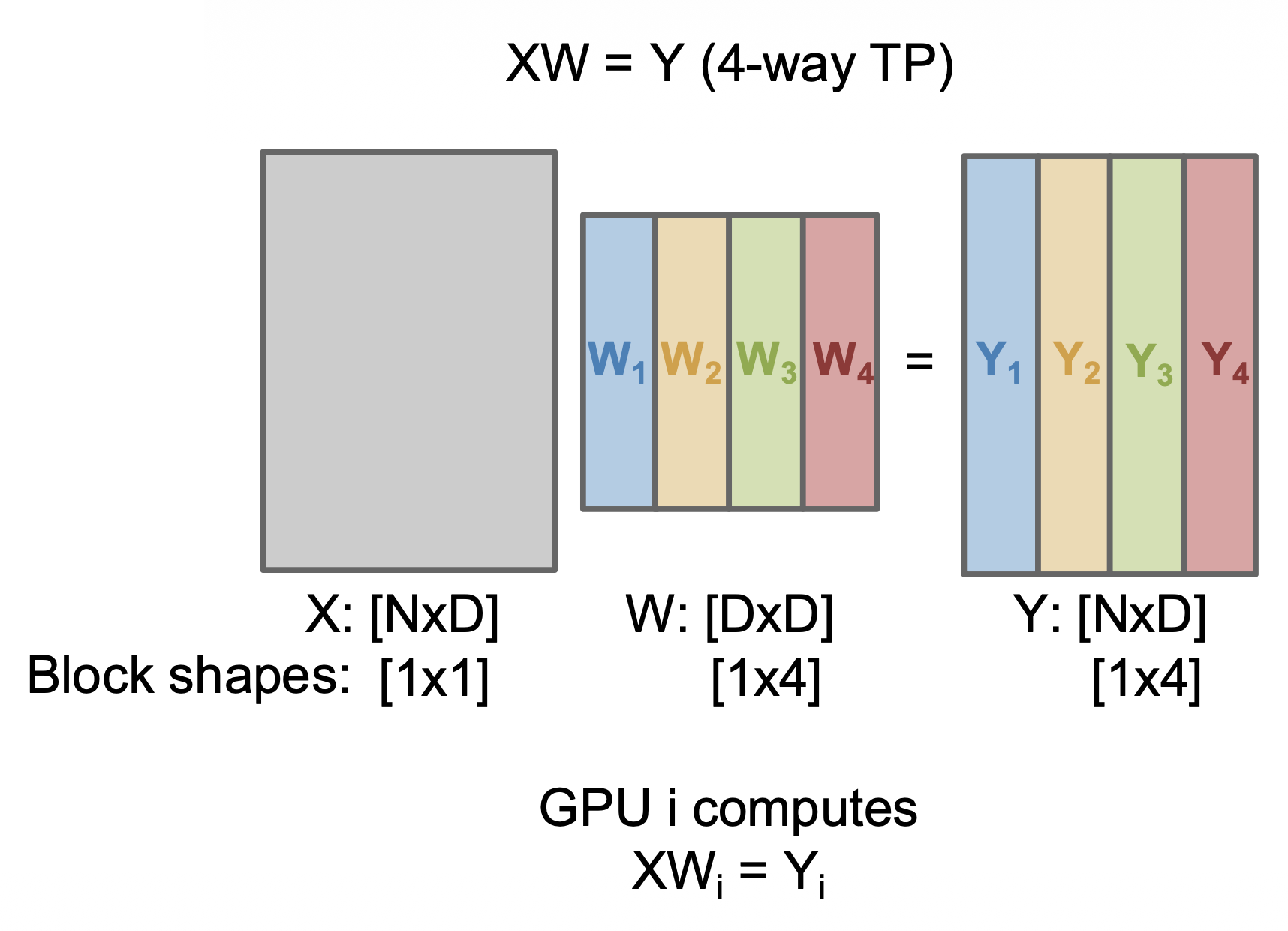
问题
需要在正向传递后收集 Y 的部分,不能与通信重叠。
解决技巧:使用两个连续的 TP 层,首先在行上分片 (shard),然后在列上分片,从而避免通信。

在 XW=Y 之后无需通信;每个 GPU 计算 Z 的一个项,然后广播给所有其他 GPUs。
实际上这 4 种并行技术可以同时使用,即 ND 并行。
- 在一个 4D 网格上安排 GPU
- GPU 在网格中的索引给出了其在每个并行维度上的排名
- 优化目标依然是最大化 MFU

评论区