Generative Models⚓︎
约 5368 个字 45 行代码 预计阅读时间 27 分钟
Supervised vs Unsupervised Learning⚓︎
-
监督学习(supervised learning):
- 数据:(x, y),其中 x 是数据,y 是标签
- 目标:习得一个 x -> y 的函数
例子

-
无监督学习(unsupervised learning):
- 数据:x(只有数据,没有标签)
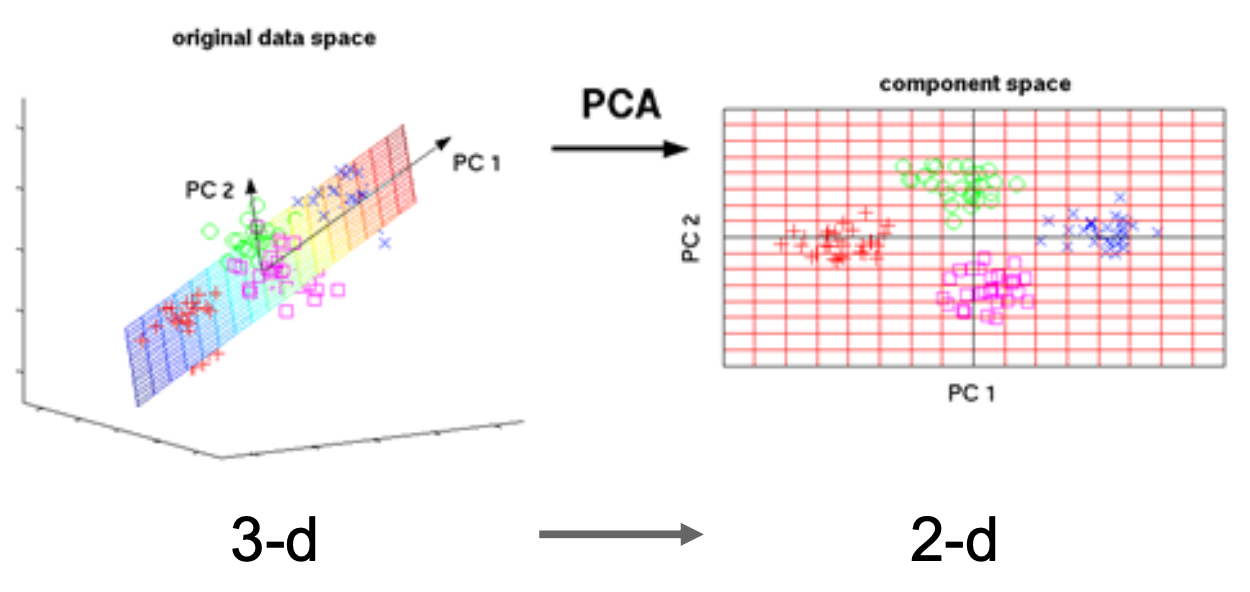
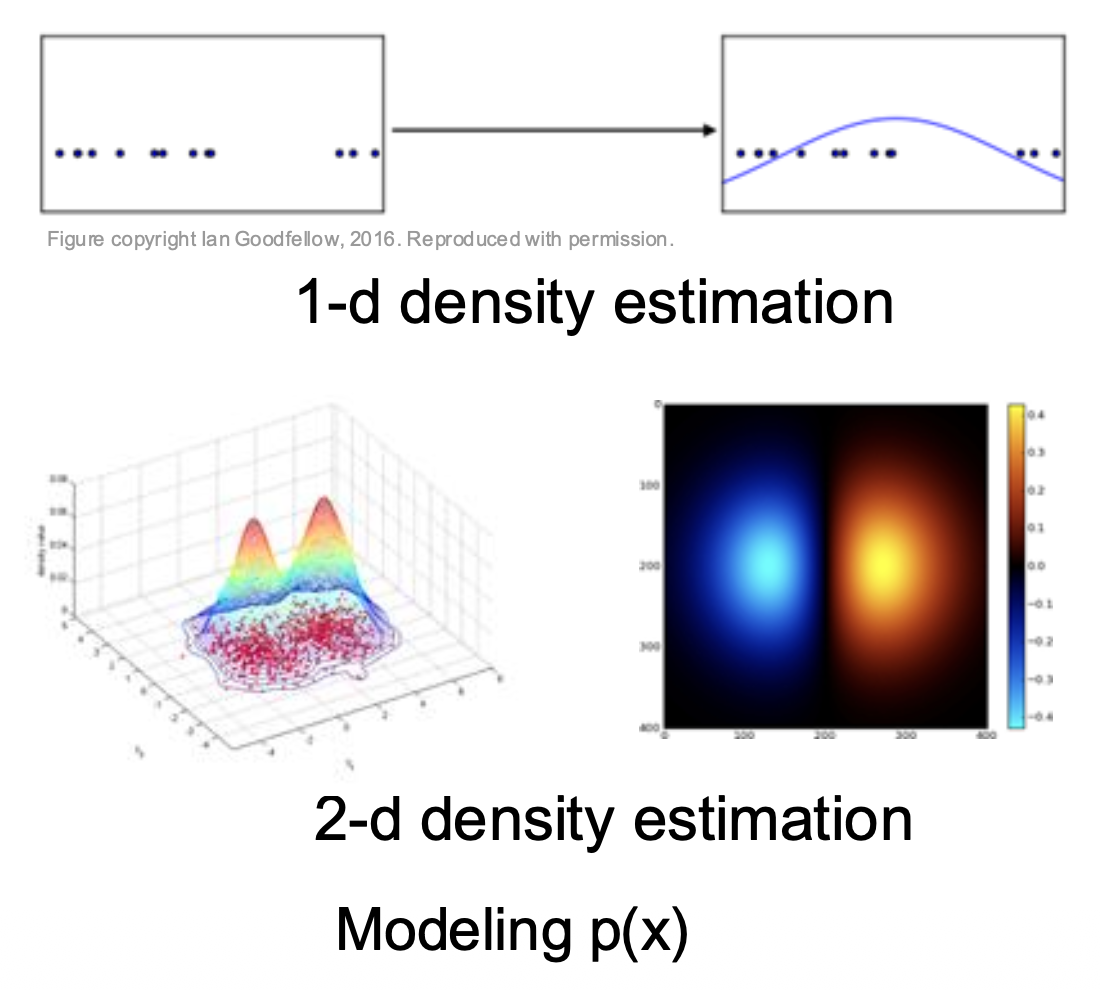
- 目标:习得数据背后的隐藏结构
- 例子:聚类、、特征学习、密度估计等
例子
Generative vs Discriminative Models⚓︎
约定
- \(x\) 为数据, \(y\) 为标签
- 回顾:
- 概率密度函数的归一化性质:\(\int_X p(x) dx = 1\)
- 贝叶斯定理:\(P(x|y) = \dfrac{P(y|x)}{P(y)} P(x)\)
-
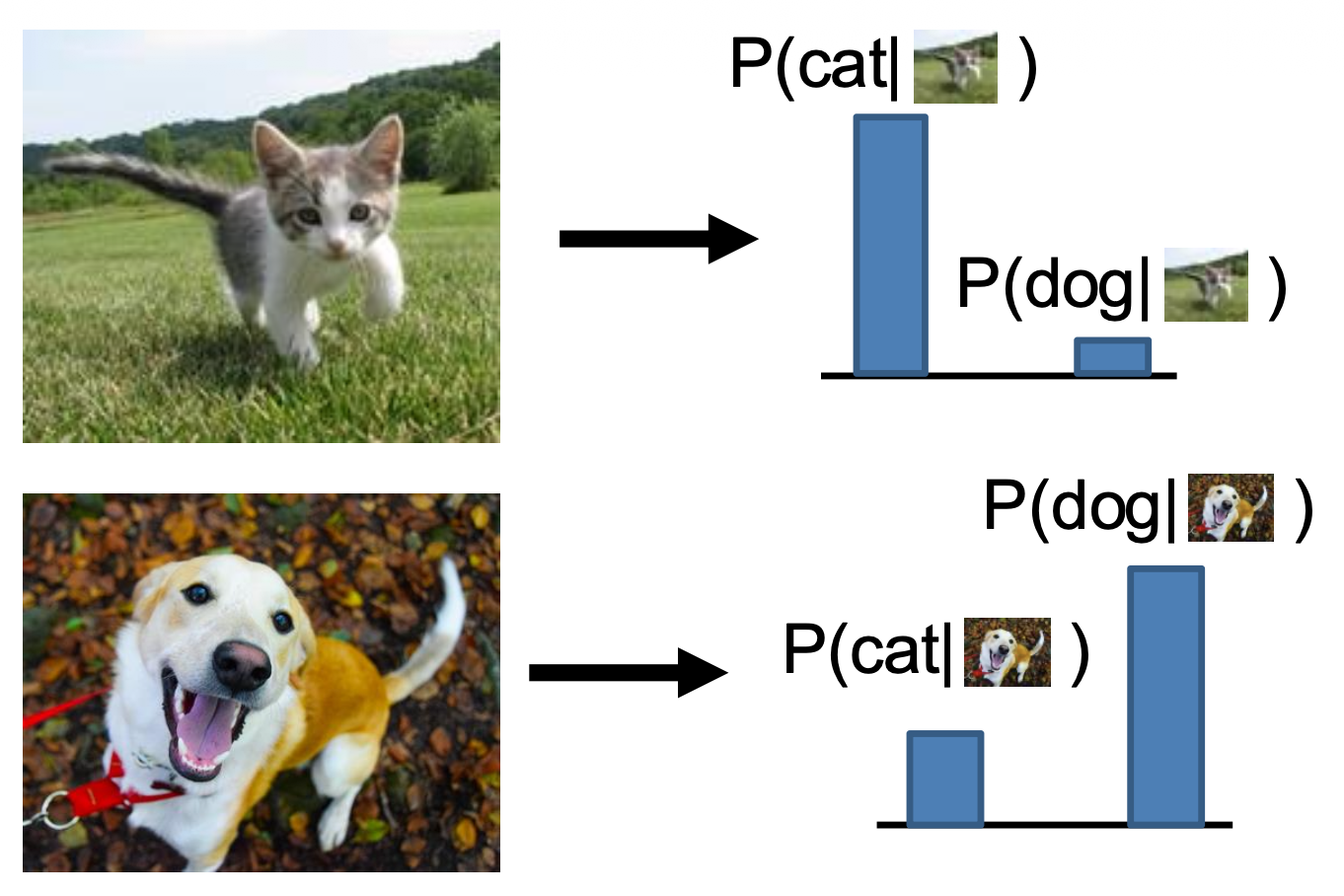
确定型模型(discrimitive model):习得概率分布 \(p(y|x)\)
-
每张图片的可能标签在概率上相互竞争,而图片之间无竞争
-
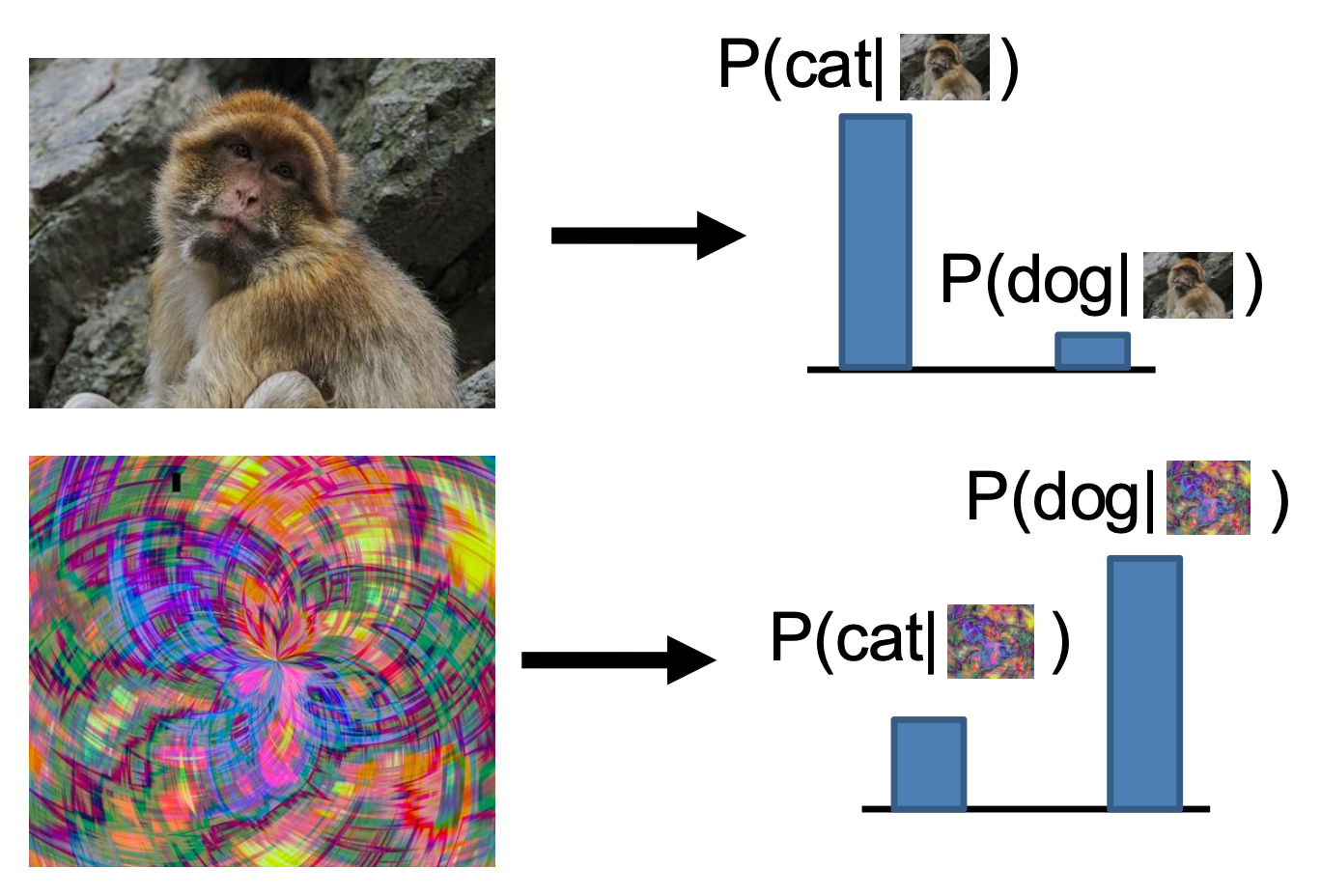
无法处理不合理的输入,必须为所有可能的输入提供标签的分布
-
将标签赋予数据 ->(带标签的)特征学习
-
-
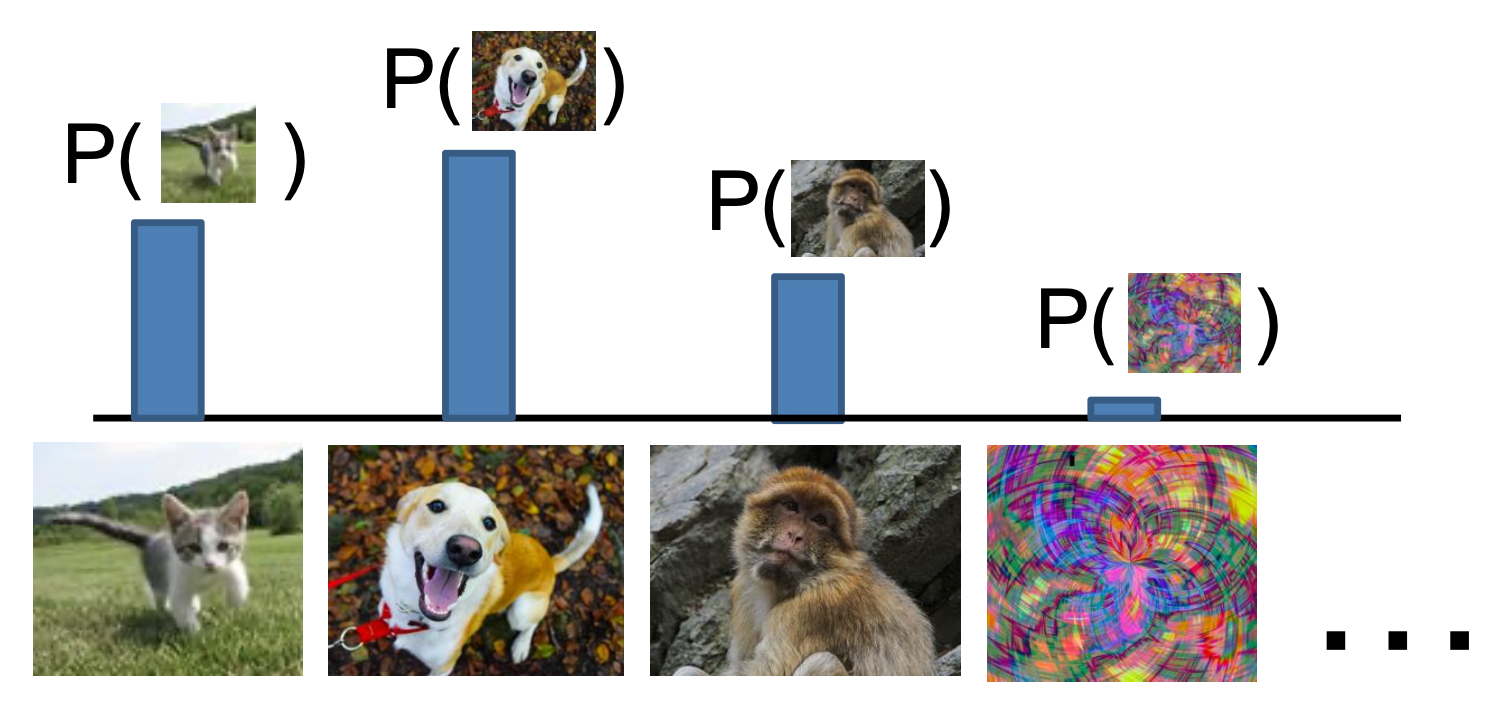
生成式模型(generative model):习得概率分布 \(p(x)\)
- 所有可能的图像都将争夺概率
- 需要对图像有深度的理解:比如狗是坐着还是站着,3 条腿的狗是否比 3 条手臂的猴子更多(
? ) - 通过给定很小的概率值来“拒绝”不合理的输入
- 检测异常点 ->(无标签的)特征学习,采样以生成最新的数据
-
条件生成式模型(conditional generative model):习得 \(p(x|y)\)
- 每个可能的标签在所有可能的图像中引发竞争
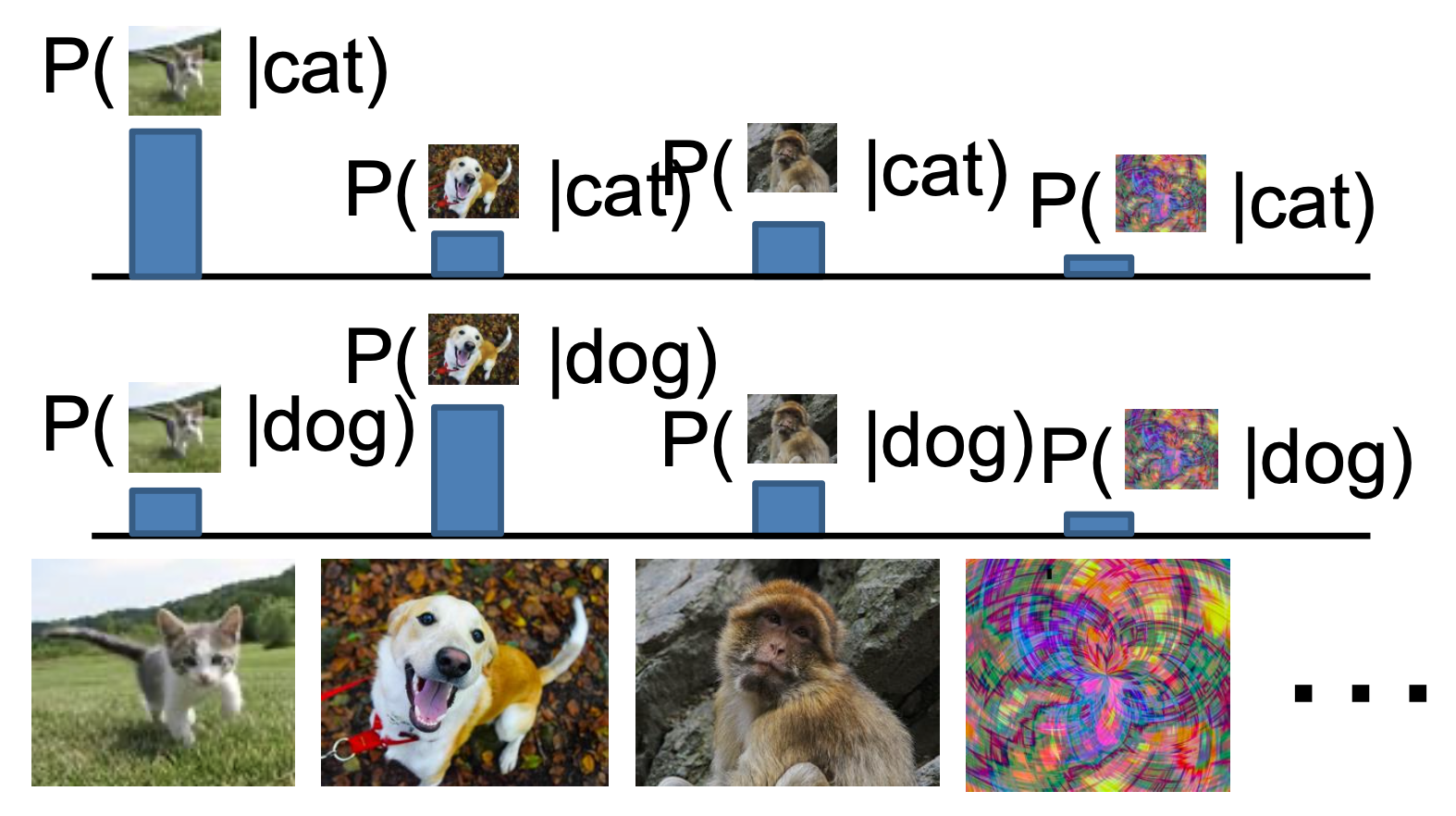
- 根据贝叶斯定理,可以根据上面两个模型构造条件生成式模型,但实际上这种做法并不常见
- 赋予标签的同时拒绝异常点
- 采样以根据标签生成数据
后两个模型都属于生成式模型,且后者在实际中最为常用。
Why Generative Models?⚓︎
使用生成式模型的主要原因是建模模糊性(modeling ambiguity) 的特性:对于输入 \(y\),有许多可能的输出 \(x\)(其概率为 \(P(x|y)\)
-
语言建模(language modeling):根据输入文本 \(y\) 输出文本 \(x\)

-
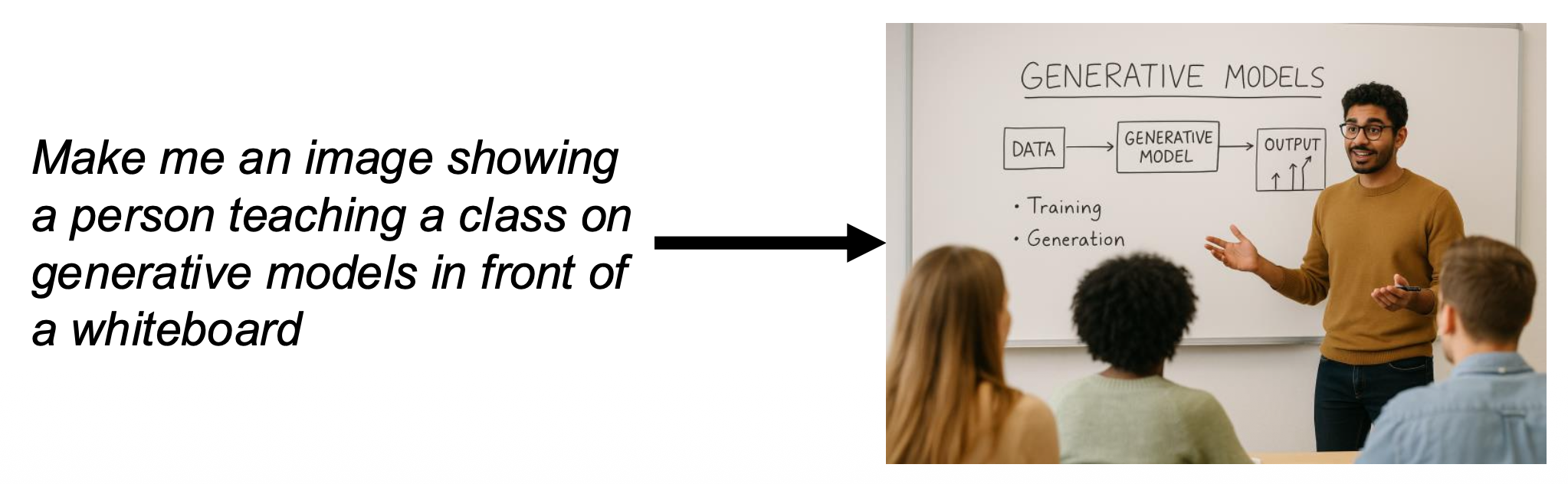
文生图(text to image):根据输入文本 \(y\) 输出图像 \(x\)
-
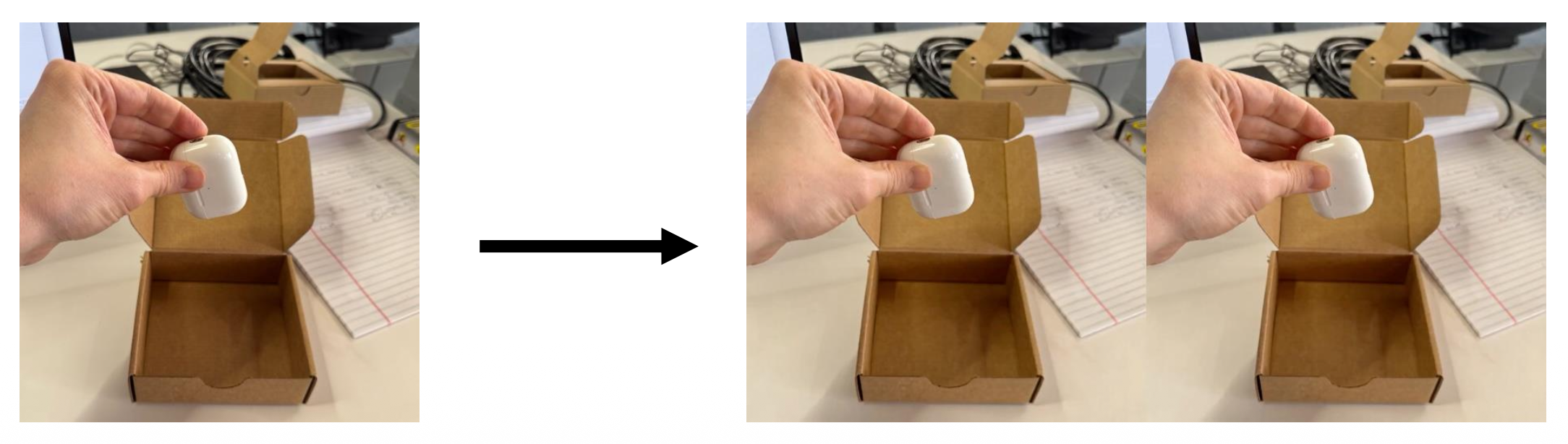
图生视频(image to video):预测接下来发生什么
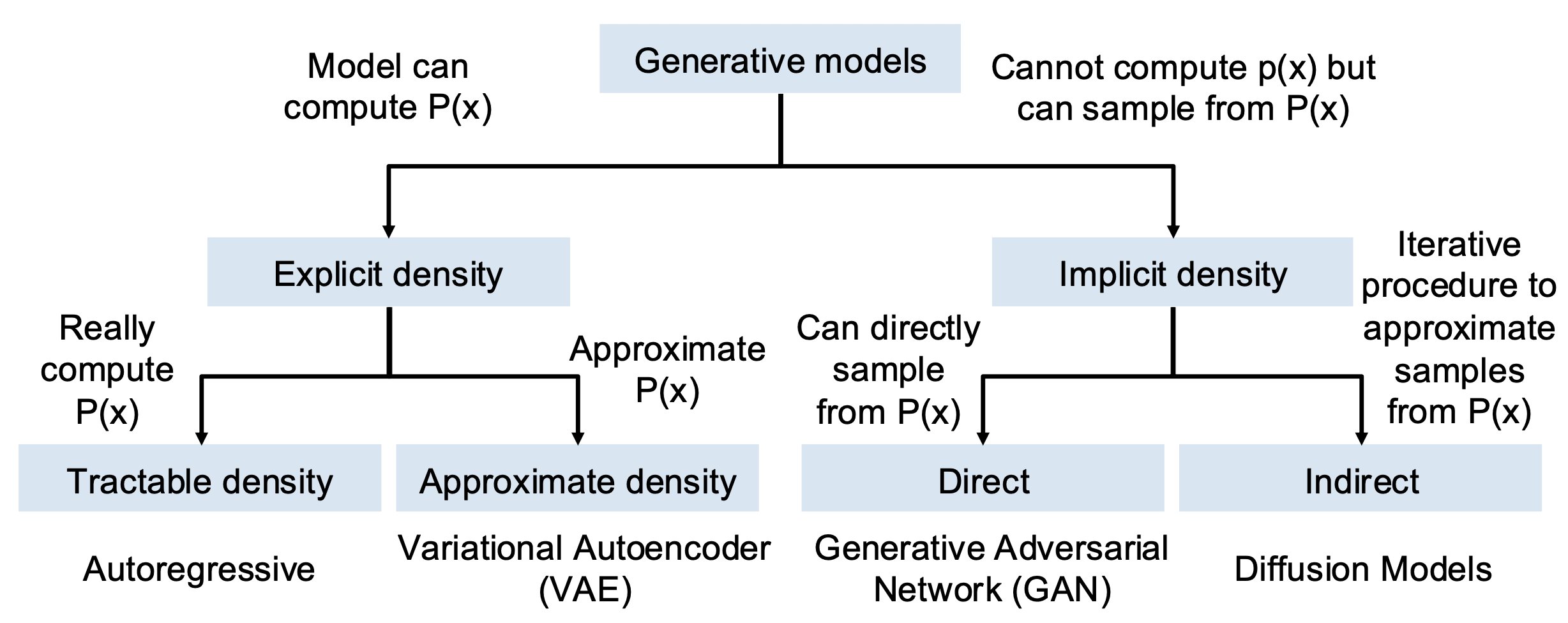
生成式模型的分类 (taxonomy)
Autoregressive Models⚓︎
Maximum Likelihood Estimation⚓︎
自回归模型(autoregressive models) 的目标是:写下一个显式函数 \(p(x) = f(x, W)\)
对于给定数据集 \(x^{(1)}, x^{(2)}, \dots, x^{(N)}\),通过解以下方程来训练模型:
- 第一行:最大化训练数据的概率(最大似然估计(maximum likelihood estimation))
- 第二行:对数技巧:乘积 -> 求和
- 第三行:最终的损失函数,使用梯度下降将其最大化
Autoregressive Models⚓︎
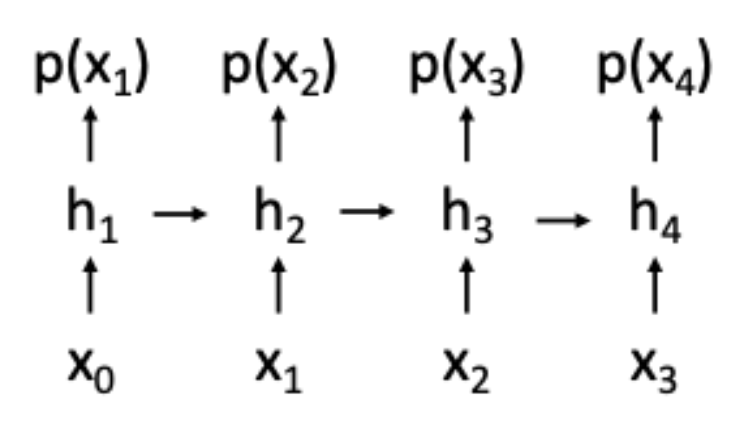
假设 \(x\) 是一个序列,即 \(x = (x_1, x_2, \dots, x_T)\),那么可以使用概率的链式法则求解:
这和 RNN 的思路很像,也和掩码 Transformer 很像。
-
RNN
-
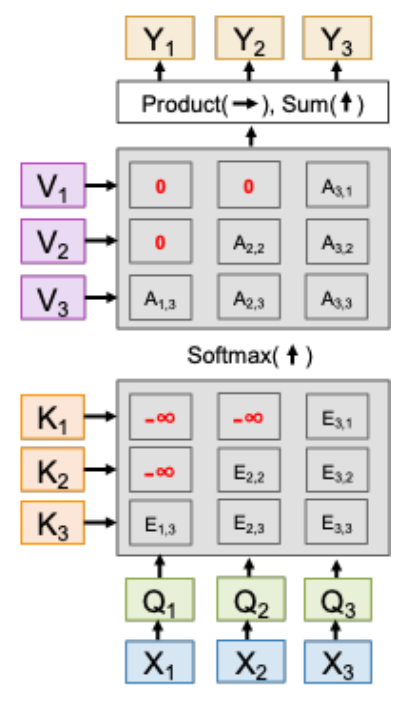
掩码 Transformer
Autoregressive Models of Images⚓︎
- 将图像看作一个包含多个 8 位子像素(subpixel) 值的序列(按扫描顺序)
- 将每个子像素预测为在 256 个值 [0 ... 255] 中的分类
- 使用 RNN 或 Transformer 建模
- 问题:成本太高,比如 1024x1024 的图像就是一个包含 3M 个子像素的序列
- 解决方法:将图像看作由块(tile) 构成的序列
Variational Autoencoders (VAEs)⚓︎
PixelRNN / PixelCNN 明确地用神经网络参数化密度函数,因此我们可以通过训练来最大化训练数据的似然性: $$ p_W(x) = \prod_{t=1}^T p_W(x_t | x_1, \dots, x_{t-1}) $$
变分自编码器(variational autoencoders, VAE) 定义了一种不可处理的(intractable)密度(无法显式计算或优化
Autoencoders (AEs)⚓︎
(非变分)自编码器的思路是通过无监督方法学习从无标签的输入 x 中提取特征 z。
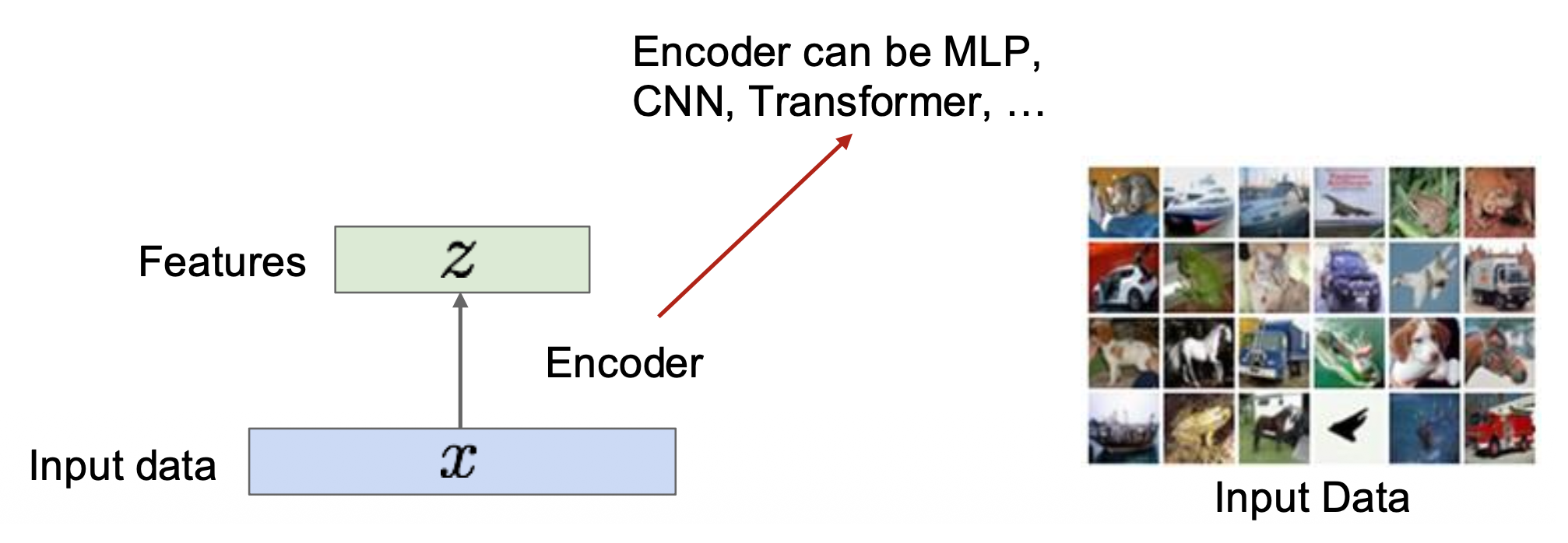
特征应当能提取能被用在下游任务中的有用信息(比如目标身份、外观、场景类型等
思考
如何在无标签的情况下学习?
使用解码器(decoder) 重建输入数据;解码器可以是 MLP,CNN 或 Transformer。
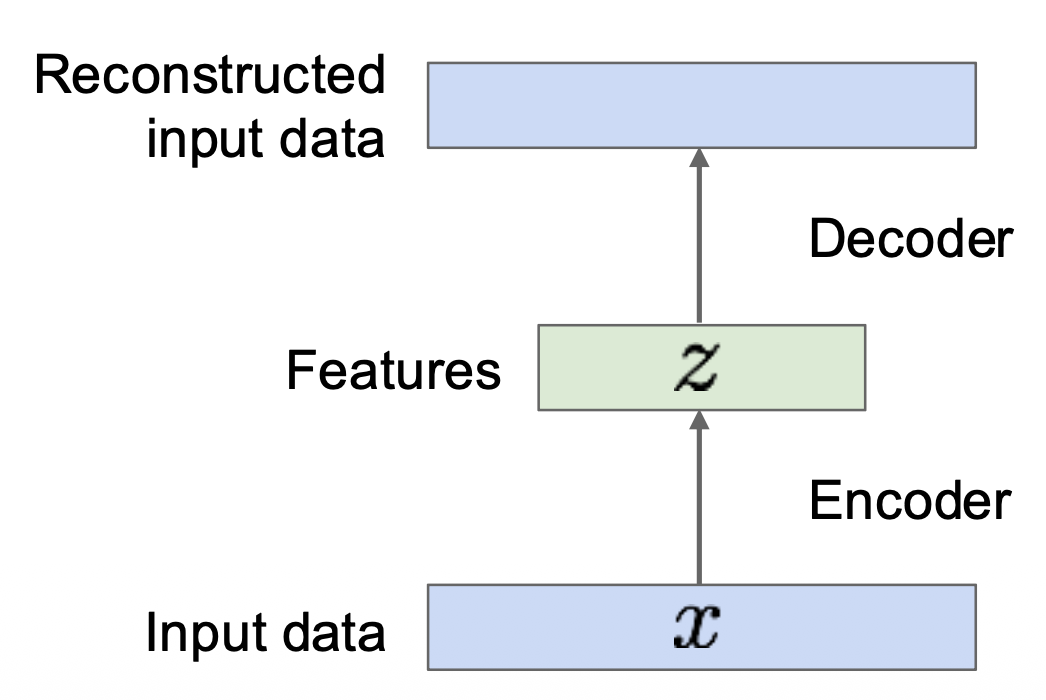
损失用输入数据 \(x\) 和重建数据 \(\hat{x}\) 的 L2 距离衡量,即 \(\|\hat{x} - x\|_2^2\)。
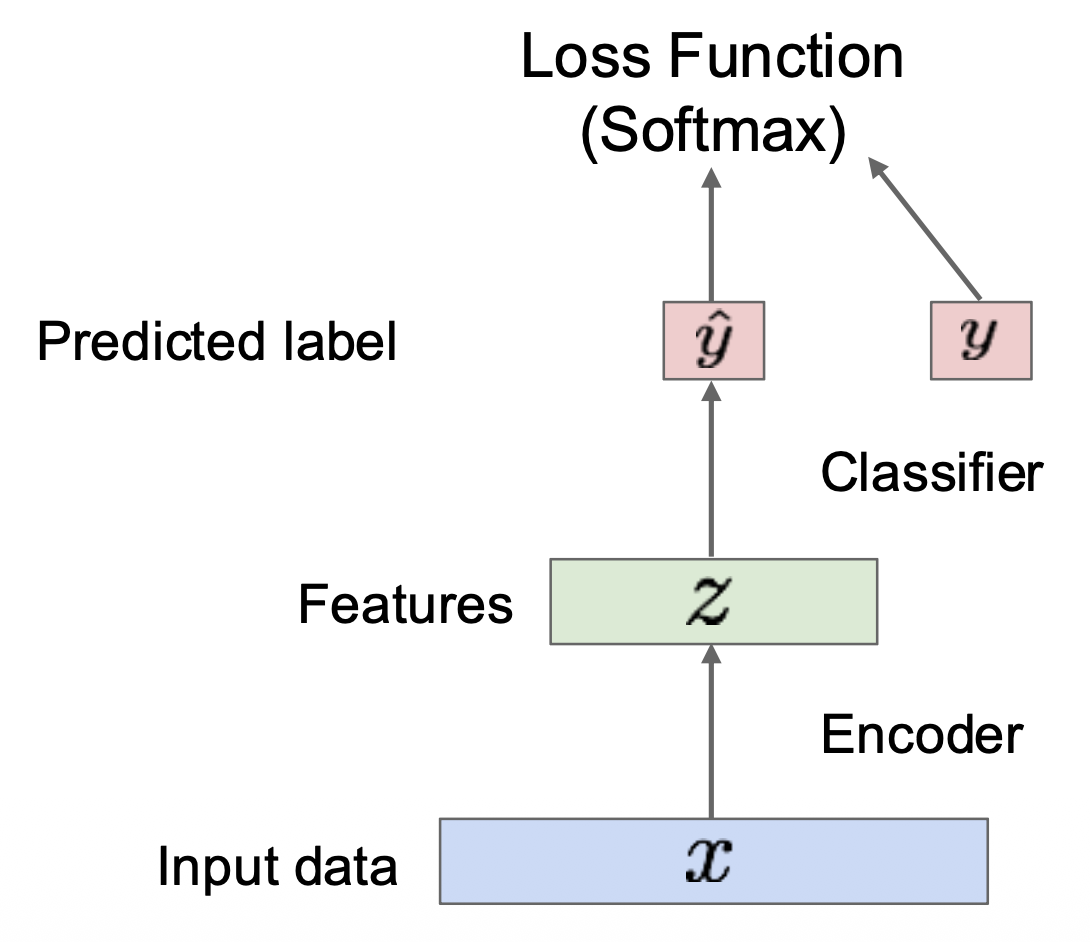
训练后,使用编码器,用于下游任务中:
如果能生成新的 \(z\),那就能用解码器来生成图像了。
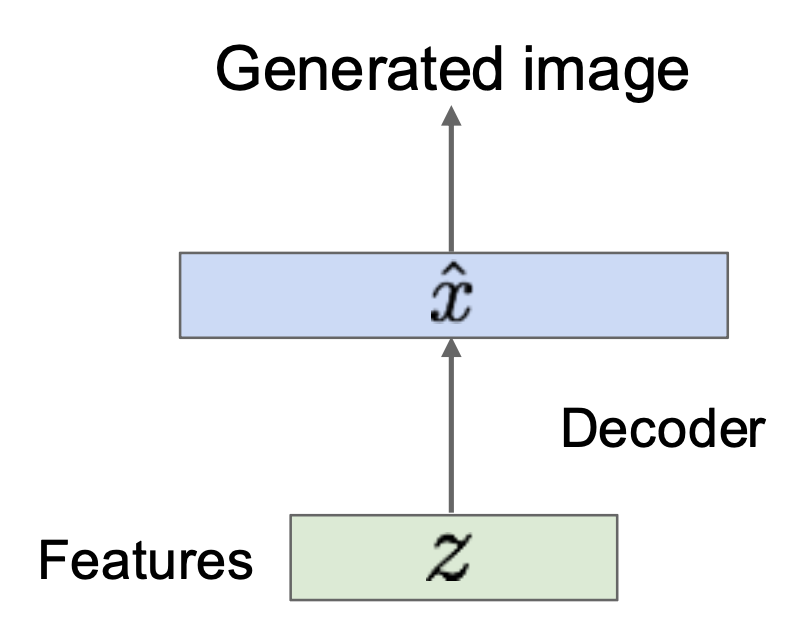
但问题是生成新的 \(z\) 不会比生成新的 \(x\) 容易。解决方案是强迫所有 \(z\) 来自一个已知的分布。
Variational Autoencoders (VAEs)⚓︎
- 从原始数据习得潜在特征(latent feature) \(z\)
- 从模型中采样以得到新的数据
假设训练数据 \(\{x^{(i)}\}_{i=1}^N\) 生成自未观察到的(潜在)表示 \(z\)。直觉上看,若 \(x\) 是一张图像,那么 \(z\) 就是用于生成 \(x\) 的潜在因子,比如属性、方向等。
训练后,像这样采样新的数据:
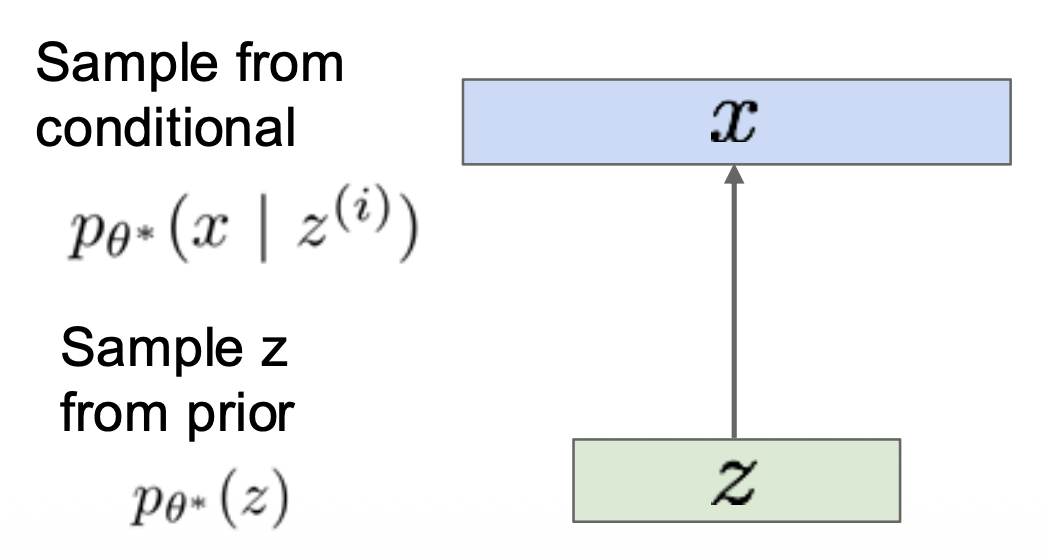
- 对于下半部分(绿色
) ,假设是简单的先验概率 \(p(z)\),比如高斯分布 -
对于上半部分(蓝色)
- 训练的基本思想依然是最大似然
- 若有关于 \((x, z)\) 的数据集,那么训练一个条件生成式模型 \(p(x|z)\)
-
我们没有观察 \(z\),因此进行边缘化(marginalize):
\[ p_\theta (x) = \int p_\theta (x, z) dz = \int p_\theta (x|z) p_\theta (z) dz \]- 其中 \(p_\theta (x|z)\) 能用解码器计算出来,\(p_\theta (z)\) 已经假设为高斯先验概率
- 问题:我们无法对所有的 \(z\) 积分
-
尝试另一个思路:贝叶斯定理
\[ p_\theta (x) = \dfrac{p_\theta (x|z) p_\theta (z)}{p_\theta (z|x)} \]- 但 \(p_\theta (z|x)\) 没法算出来
- 解决思路:训练另一个网络,得到 \(q_\phi (z|x) \approx p_\theta (z|x)\)
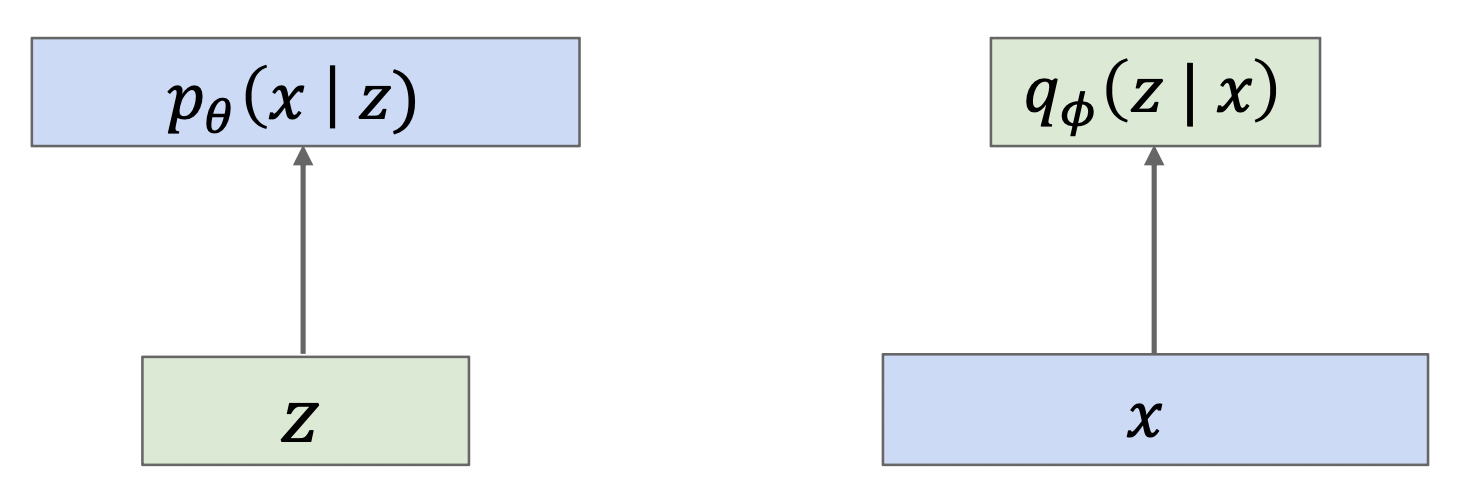
于是,整个 VAE 分为两个部分:
- 解码器网络:输入潜在编码 \(z\),输出关于数据 \(x\) 的分布(左图)
- 编码器网络:输入数据 \(x\),输出关于潜在编码 \(z\) 的分布(右图)
如果能确保 \(q_\phi (z|x) \approx p_\theta (z|x)\),那么我们就能近似表示 \(p_\theta (x)\),即:
所以现在的思路是:联合训练编码器和解码器。
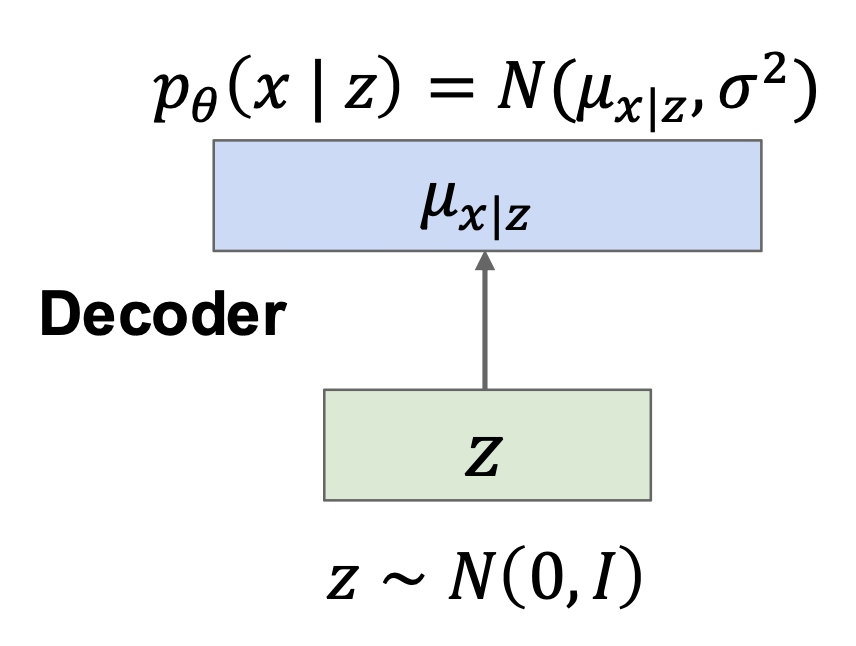
神经网络是通过输出(对角线)分布的均值(和标准差)来输出概率分布的,因此将上图转变为以下形式:
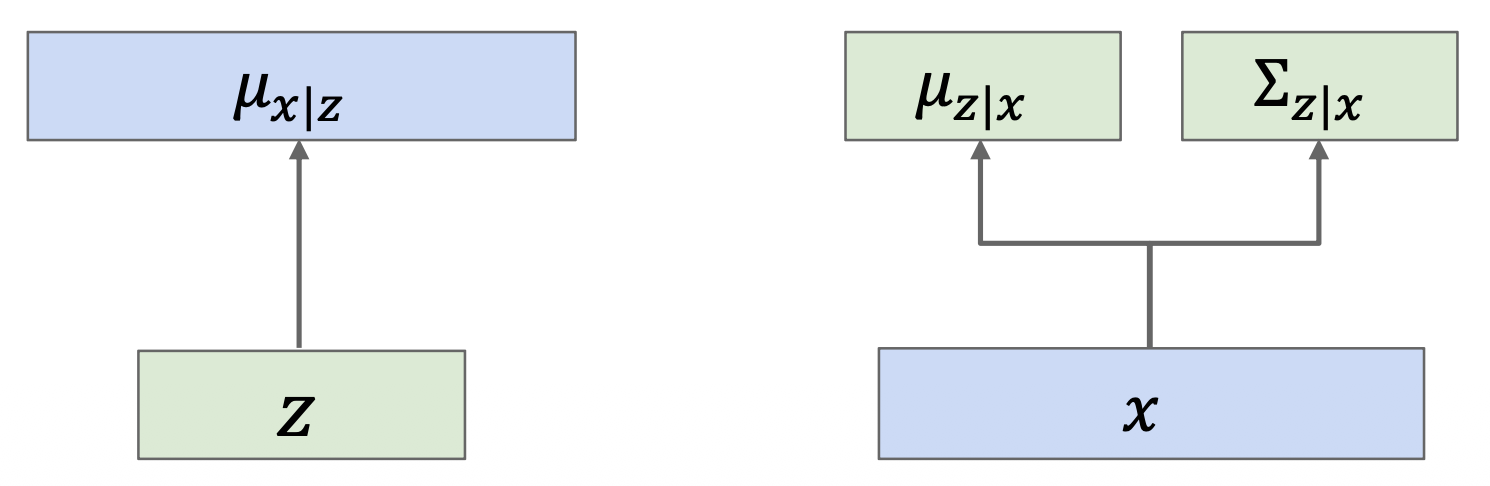
- \(p_\theta (x|z) = N(\mu_{x|z}, \sigma^2)\) -> \(\log p_\theta (x|z) = -\dfrac{1}{2\sigma^2} \|x - \mu\|_2^2 + C_2\)
- \(q_\phi (z|x) = N(\mu_{z|x}, \Sigma_{z|x})\)
不难发现,最大化 \(\log p_\theta (x|z)\) 等价于最小化 \(x\) 和网络输出的 L2 距离。
继续计算 \(\log p_\theta (x|z)\):
由于上式不依赖于 \(z\),因此可以将其包装成期望的形式,即: $$ \begin{aligned} \log p_\theta(x) & = E_{z \sim q_\phi(z|x)}[\log p_\theta (x)] \ & = E_z[\log p_\theta(x|z)] - E_z \left[\log \dfrac{q_\phi(z|x)}{p(z)}\right] + E_z \left[\log \dfrac{q_\phi(z|x)}{p_\theta(z|x)} \right] \ & = E_{z \sim q_{\phi}(z|x)}[\log p_{\theta}(x|z)] - D_{KL}(q_{\phi}(z|x), p(z)) + D_{KL}(q_{\phi}(z|x), p_{\theta}(z|x)) \end{aligned} $$
最后三项分别代表:
- 数据重建(data reconstruction):
- x => 解码器 => 编码器的过程应该能重建 x
- 计算得到关于高斯分布的封闭形式
- 先验概率(prior):
- 编码器的输出 \(q_{\phi}(z|x)\) 需要和关于 z 的先验概率 \(p(z)\) 匹配
- 计算得到关于高斯分布的封闭形式
- 后验近似(posterior approximation):
- 编码器的输出 \(q_{\phi}(z|x)\) 需要和 \(p_{\theta}(z|x)\) 匹配
- 无法进行关于高斯分布的计算
- 解码器的输出 \(q_{\phi}(z|x)\) 需要和 \(p_{\theta}(z|x)\) 匹配
- 由于 KL >= 0,所以我们可以删除这项,获取似然的下限
综上,我们的 VAE 的训练目标为:
像这种共同训练编码器 q 和解码器 p,以最大化数据似然的变分下界,也称为证据下界(evidence lower bound, ELBo)。
Training⚓︎

训练步骤如下:
- 通过编码器运行输入数据,以得到关于 \(z\) 的概率分布
- 先验损失:编码器输出应该是单位高斯(标准正态分布,均值为 0,单位方差)
- 从编码器输出 \(q_\phi (z|x)\) 中采样 \(z\)(重参数化 (reparameterization) 技巧)
- 通过解码器运行 \(z\),得到预测的数据均值
- 重建损失:预测均值需要在 L2 上和 \(x\) 匹配
损失项之间处于相互抗争的状态:
- 重建损失(\(E_{z \sim q_{\phi}(z|x)}[\log p_{\theta}(x|z)]\))希望 \(\Sigma_{z|x} = 0\) 且 \(\mu_{z|x}\) 对每个 \(x\) 而言是唯一的,因此解码器能确定得重建 \(x\)
- 先验损失(\(D_{KL}(q_{\phi}(z|x), p(z))\))希望 \(\Sigma_{z|x} = \mathbf{I}\) 且 \(\mu_{z|x} = 0\),因此编码器输出始终遵循标准正态分布
Sampling⚓︎
采样步骤如下:
- 从先验分布中采样 \(z\)
- 运行解码器以获取图像
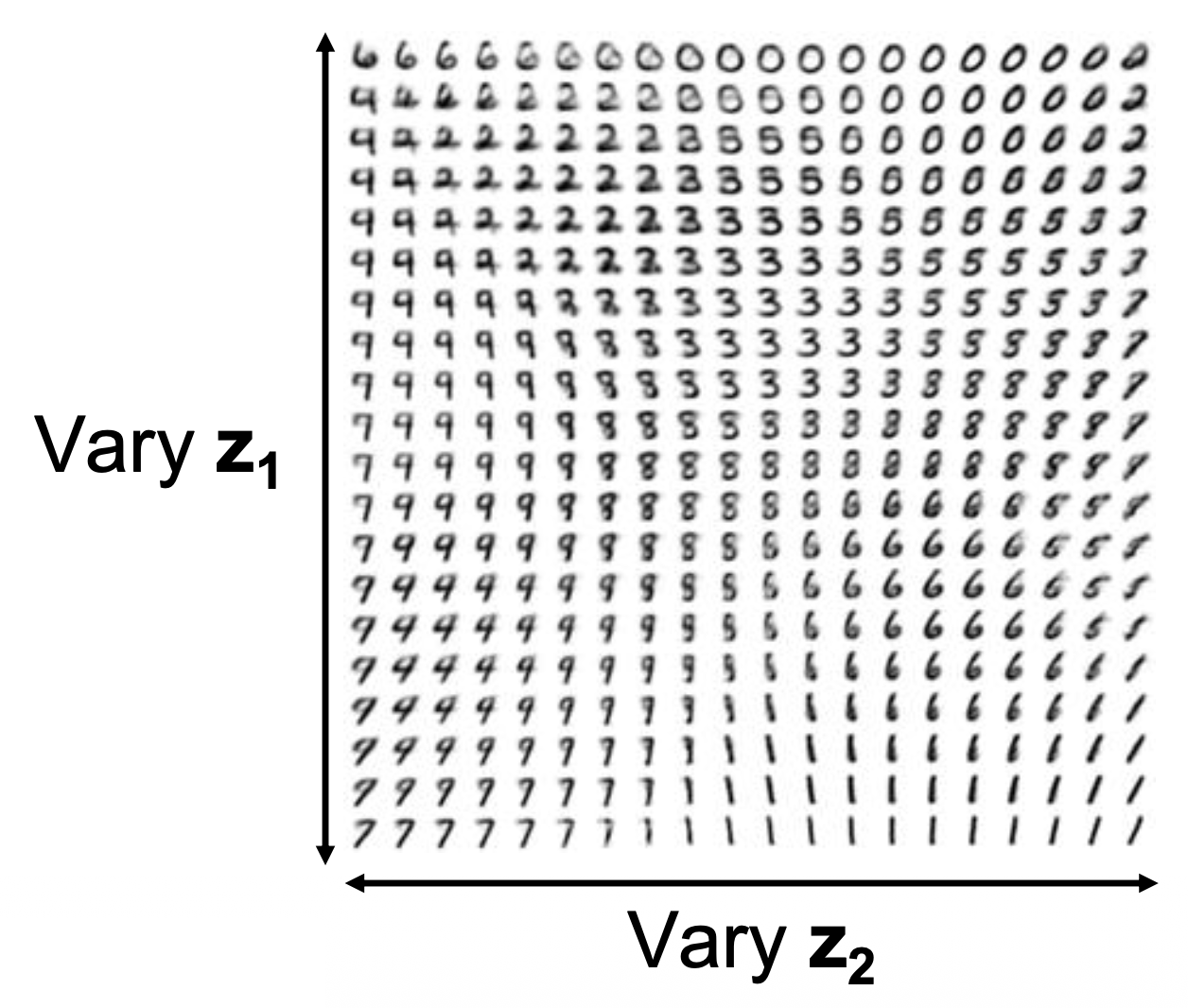
Disentangling⚓︎
- \(p(z)\) 的对角先验分布导致 \(z\) 的维度相互独立
- “解耦变化因素 (disentangling factors of variation)”
Generative Adversarial Networks⚓︎
回顾目前学过的生成式模型
-
自回归模型直接最大化训练数据的似然
\[ p_{\theta}(x) = \prod_{i=1}^{N} p_{\theta}(x_i | x_1, \dots, x_{i-1}) \] -
变分自编码器引入潜在特征 \(z\),并最大化下限
\[ p_{\theta}(x) = \int_{z} p_{\theta}(x|z)p(z)dz \geq \mathbb{E}_{z \sim q_{\phi}(z|x)}[\log p_{\theta}(x|z)] - D_{KL}(q_{\phi}(z|x), p(z)) \]
生成式对抗网络(generative adversarial network, GAN) 放弃对 \(p(x)\) 建模,而是允许我们根据 \(p(x)\) 抽取样本。
- 设置:从分布 \(p_{\text{data}}(x)\) 中抽取数据 \(x_i\),想从 \(p_{\text{data}}\) 中采样
- 思路:
- 引入潜变量 \(z\),它具有简单的先验 \(p(z)\)(例如单位高斯分布)
- 从分布 \(z \sim p(z)\) 采样,将其传递给生成器网络(generator network) \(x = G(z)\);此时 \(x\) 就是来自生成器分布 \(p_G\) 的一个样本,我们希望 \(p_G = p_{\text{data}}\)
GAN 的架构图如下:
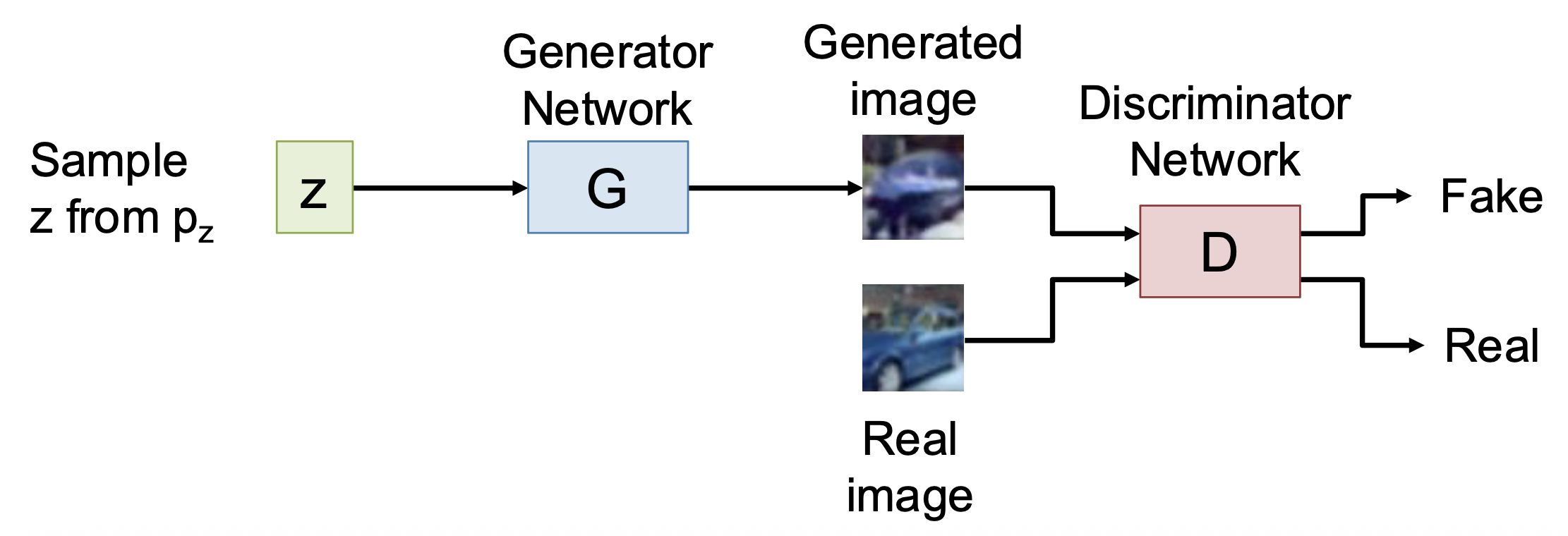
- 训练生成器网络 \(G\),将 \(z\) 转换从 \(p_G\) 中采样得到的假数据 \(x\),用于欺骗判别器 \(D\)
- 训练判别器网络(discriminator network) \(D\) 来为数据的真假分类
Training Objective⚓︎
\(G, D\) 应当共同训练,目标是让 \(p_G\) 收敛于 \(p_{\text{data}}\),即完成以下极小极大博弈(minimax game)(方程中的颜色和上图对应
其中:
-
\(D(x) = P(x \text{ is real})\)
- $D(x) = 0 \Rightarrow $ 假数据
- $D(x) = 1 \Rightarrow $ 真数据
-
训练 \(D\) 时想象固定 \(G\)
\[ \min_{\textcolor{cornflowerblue}{G}} \max_{\textcolor{red}{D}} \left( \overbrace{E_{x \sim p_{data}} [\log \textcolor{red}{D(}x\textcolor{red}{)}]}^{\textcolor{red}{\substack{\text{Discriminator wants} \\ D(x) = 1\text{ for real data}}}} + E_{\textcolor{yellowgreen}{z \sim p(z)}} [\overbrace{\log(1 - \textcolor{red}{D(}\textcolor{cornflowerblue}{G(}\textcolor{yellowgreen}{z}\textcolor{cornflowerblue}{)}\textcolor{red}{)})}^{\textcolor{red}{\substack{\text{Discriminator wants} \\ D(x) = 0\text{ for fake data}}}}] \right) \] -
训练 \(G\) 时想象固定 \(D\)
\[ \min_{\textcolor{cornflowerblue}{G}} \max_{\textcolor{red}{D}} \left( \overbrace{E_{x \sim p_{data}} [\log \textcolor{red}{D(}x\textcolor{red}{)}]}^{\textcolor{cornflowerblue}{\substack{\text{This term oes not} \\ \text{depend on } G}}} + E_{\textcolor{yellowgreen}{z \sim p(z)}} [\overbrace{\log(1 - \textcolor{red}{D(}\textcolor{cornflowerblue}{G(}\textcolor{yellowgreen}{z}\textcolor{cornflowerblue}{)}\textcolor{red}{)})}^{\textcolor{cornflowerblue}{\substack{\text{Generator wants} \\ D(x) = 1\text{ for fake data}}}}] \right) \]
具体来说,使用交替的梯度更新来训练 \(G, D\)。先将方程简写为 \(\min\limits_G \max\limits_D V(G, D)\),那么:
注意
我们不是在最小化总体损失,并且没有可参考的训练曲线。
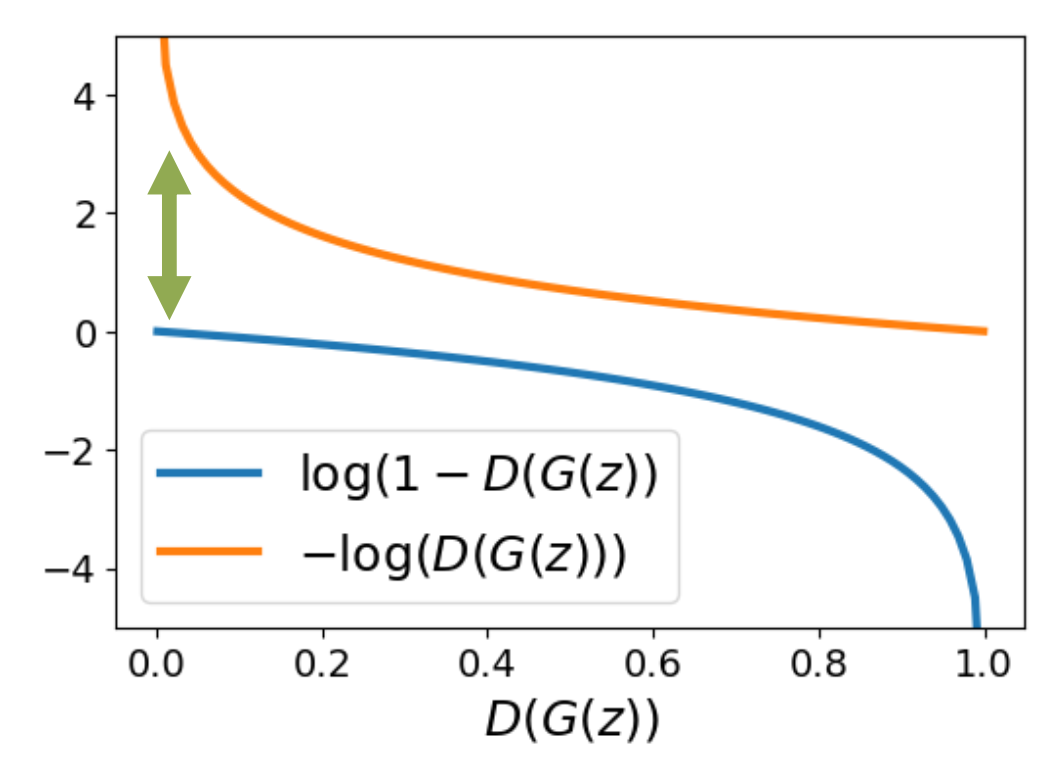
- 在训练开始时,生成器表现非常糟糕,而判别器能够轻松区分数据的真假,因此 \(D(G(z))\) 的结果接近 0
- 问题:\(G\) 的梯度接近 0,导致训练不起来
- 解决方案:生成器希望 \(D(G(z)) = 1\),那就通过训练生成器以最小化 \(-\log D(G(z))\),训练判别器以最大化 \(\log (1 - D(G(z)))\),这样生成器在一开始获得很大的梯度
思考
为何上述方程是一个好的目标函数?
-
内在目标通过以下方程最大化(对任何 \(p_G\),证明略
) :\[ D_G^* (x) = \dfrac{p_{\text{data}}(x)}{p_{\text{data}}(x) + p_G(x)} \] -
外在目标通过以下方程最小化:\(p_G(x) = p_{\text{data}}(x)\)
注意
具有固定容量的神经网络可能无法表示最优的 \(D, G\),这并没有告诉我们关于有限数据解的收敛性的任何信息。
GAN Architecture⚓︎
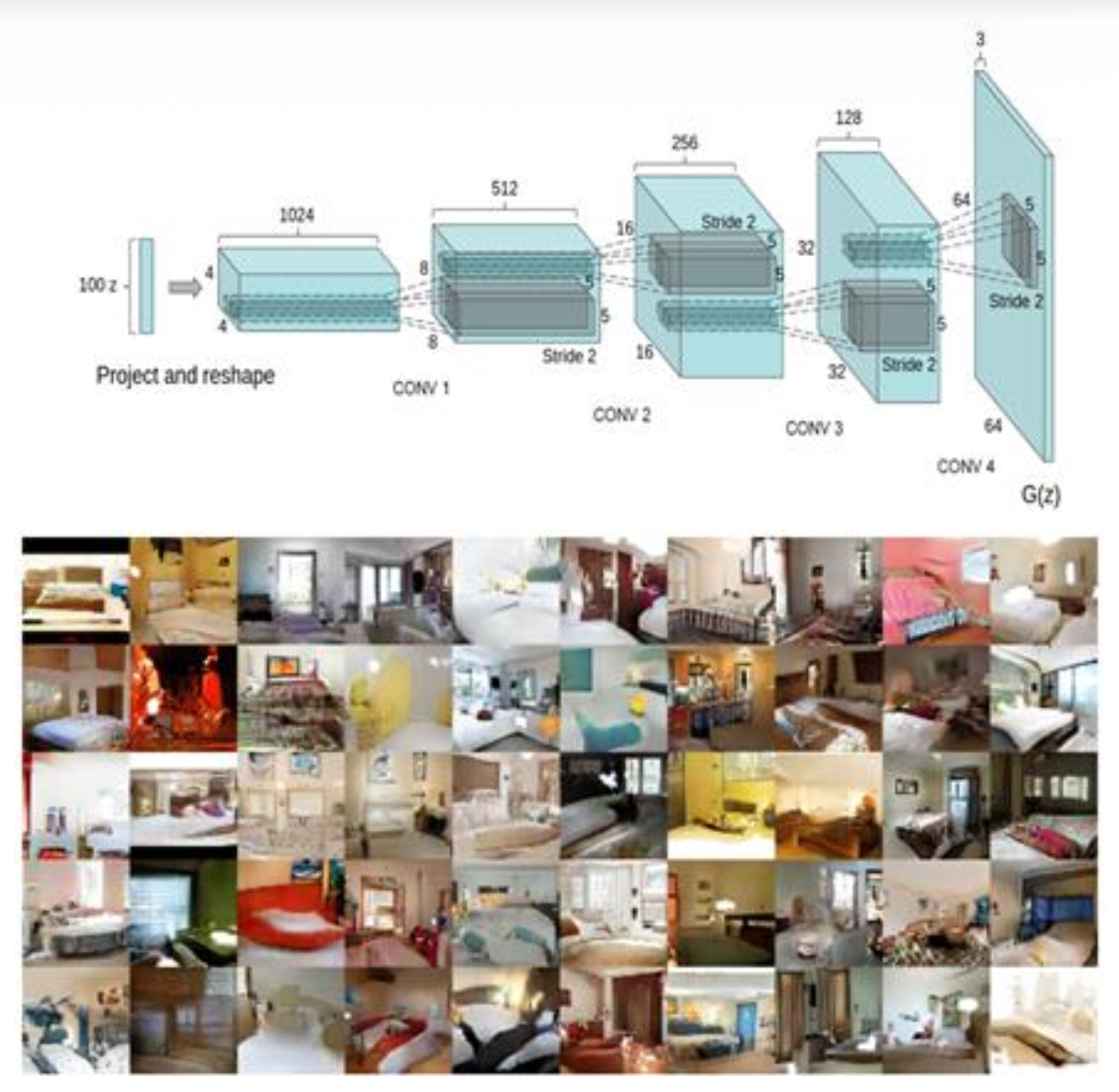
DC-GAN⚓︎
- 生成器和判别器都是神经网络
- 神经网络通常是 CNNs,在 Vit 诞生前 GAN 并不受欢迎
- DC-GAN 是第一个在非玩具数据上运行的 GAN 架构
注:作者 Radford 后来参与了 GPT-1 和 GPT-2 的设计。
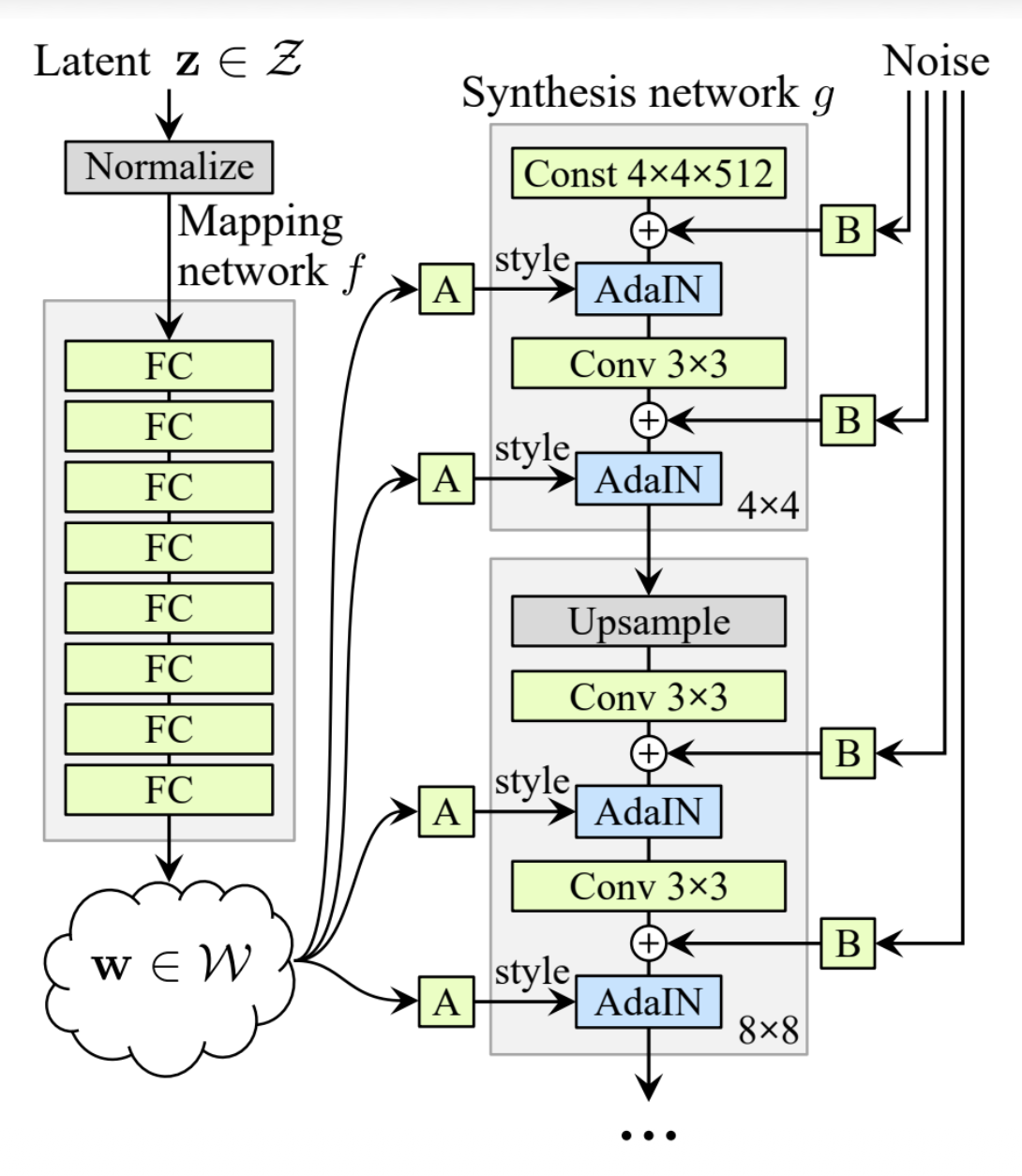
StyleGAN⚓︎
- StyleGAN是一种更复杂的架构,它通过自适应归一化(adaptive normalization) 来注入噪音
-
在每一层预测一个与 \(x\) 相同形状的缩放因子 \(w\) 和偏移量 \(b\):
\[ AdaIN(x, w, b)_w = w_i \dfrac{x_i - \mu(x)}{\sigma(x)} + b_i \]
Latent Space Interpolation⚓︎
- 潜在空间是平滑的(smooth)
-
给定潜在向量 \(z_0, z_1\),我们能在两者之间做插值:
\[ \begin{aligned} z_t & = tz_0 + (1 - t)z_1 \\ x_t & = G(z_t) \end{aligned} \] -
结果图像 \(x_t\) 可以在样本之间平滑插值
效果

Karras et al, ”Alias-Free Generative Adversarial Networks”, NeurIPS 2021
总结
GAN 在大约 2016-2021 年是首选的模型。
- 优点:
- 形式化简单
- 非常好的图像质量
- 缺点:
- 无法查看损失曲线
- 训练不稳定
- 很难扩展到大模型 + 数据
Diffusion Models⚓︎
警告
该领域的术语和符号没有统一:存在许多不同的数学表达;不同论文的术语和符号存在大量差异。所以下面只介绍现代的“干净”实现(即校正流)的基础知识。
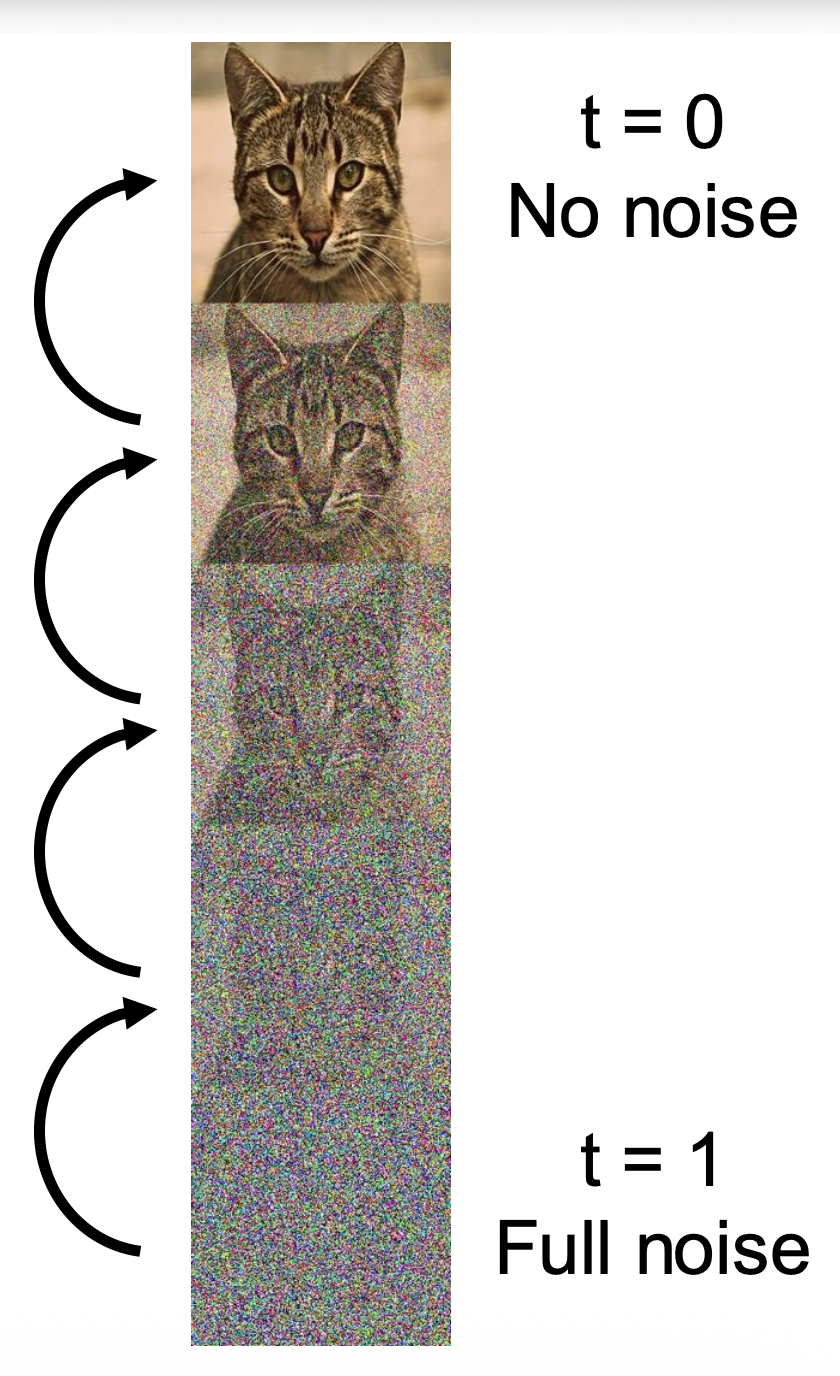
扩散模型(diffusion models) 的大致思路如下:
- 选取一个噪声分布(noise distribution) \(z \sim p_{\text{noise}}\)(通常使用单位高斯分布)
- 数据 \(x\) 被不同噪声等级(noise levels) \(t\) 破坏后得到的噪声数据 \(x_t\)
- 训练一个神经网络 \(f_\theta(x_t, t)\),以移除一些噪声
- 在推理期间,从 \(x_1 \sim p_{\text{noise}}\) 采样并且连续多次应用 \(f_\theta\),以生成无噪声的样例 \(x_\theta\)
Rectified Flow⚓︎
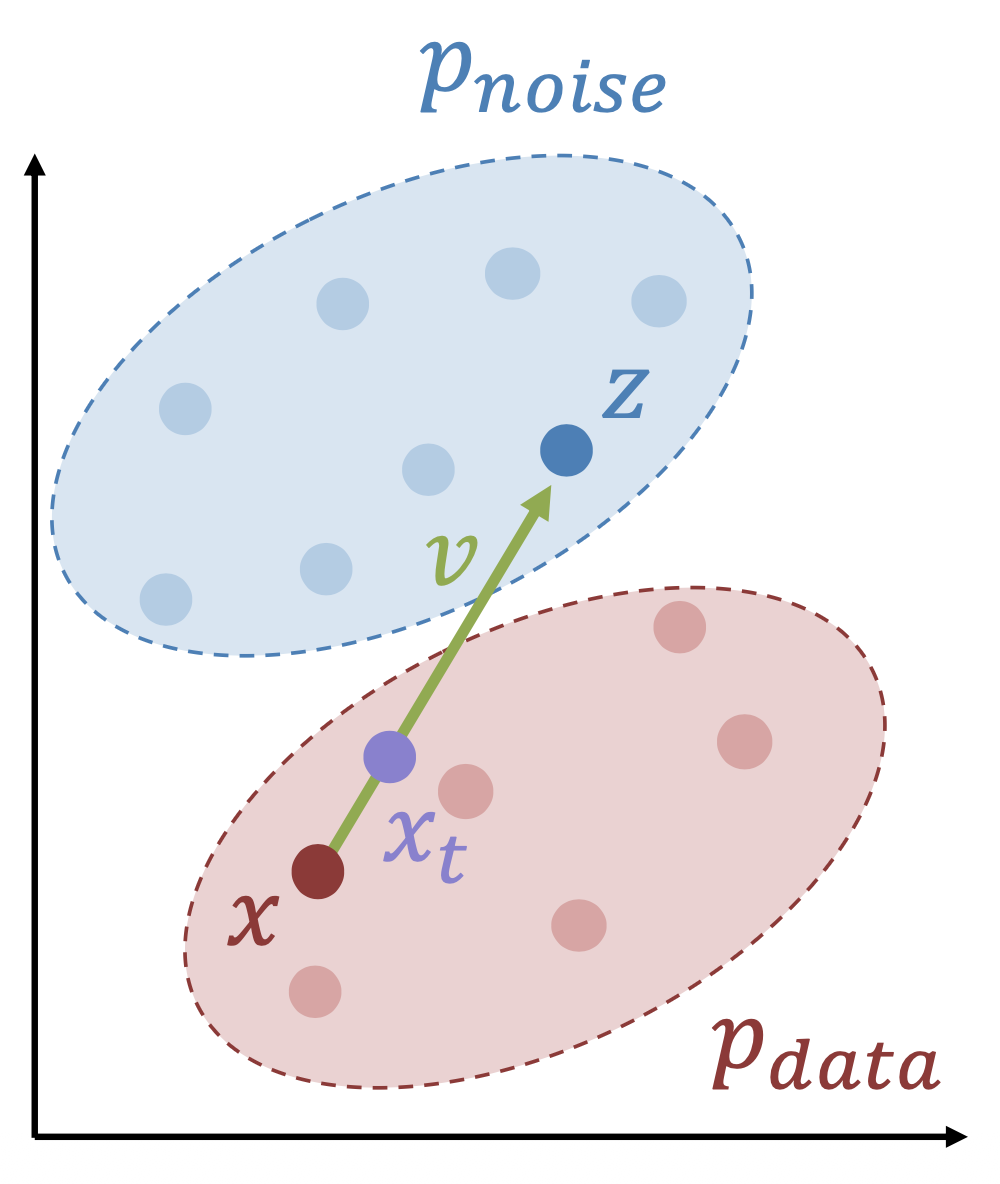
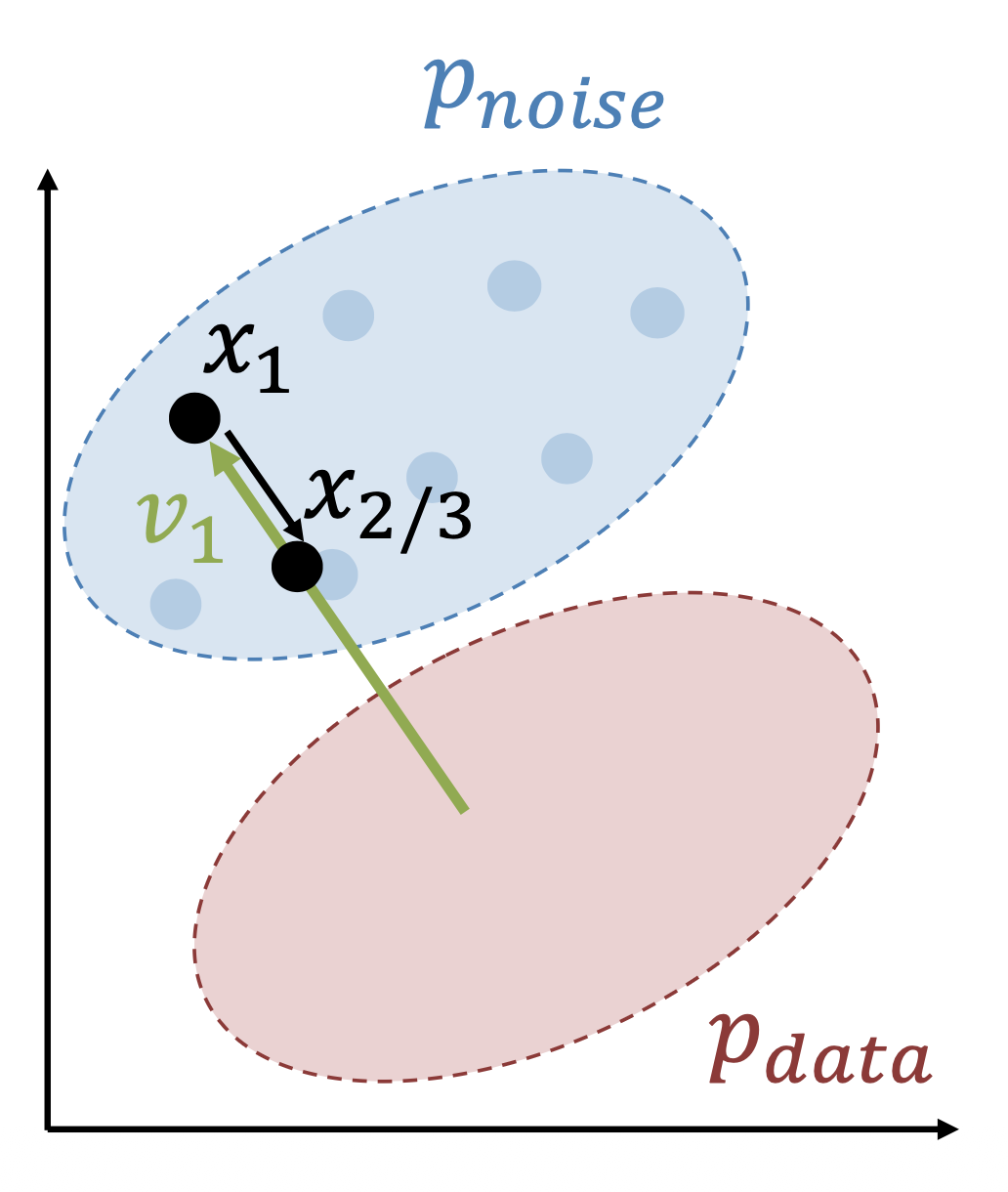
校正流(rectified flow) 的思路:
- 假设有来自 \(\textcolor{red}{p_{\text{data}}}\) 的一个简单噪声 \(\textcolor{cornflowerblue}{p_{\text{noise}}}\)(比如高斯分布)和样本
-
在每一次训练迭代中,在以下分布中采样:
\[ \textcolor{cornflowerblue}{z} \sim \textcolor{cornflowerblue}{p_{\text{noise}}} \quad \textcolor{red}{x} \sim \textcolor{red}{p_{\text{data}}} \quad t \sim \text{Uniform}[0, 1] \] -
设置 \(\textcolor{plum}{x_t} = (1 - t)\textcolor{red}{x} + tz, \textcolor{yellowgreen}{v} = \textcolor{cornflowerblue}{z} - \textcolor{red}{x}\)
-
训练一个预测 \(v\) 的神经网络:
\[ L = \|f_\theta(\textcolor{plum}{x_t}, t) - \textcolor{yellowgreen}{v}\|_2^2 \] -
核心的训练循环仅需几行代码:
-
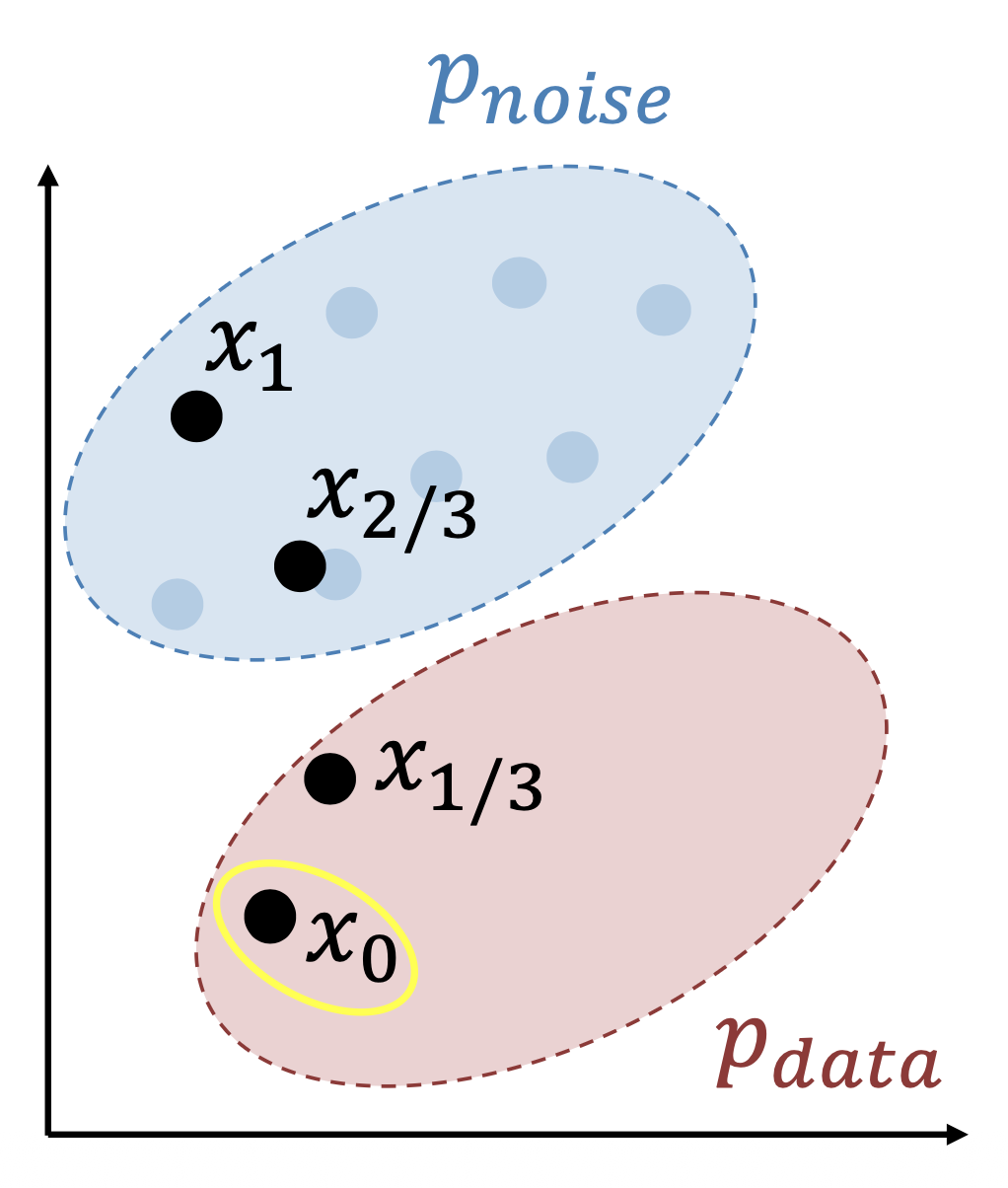
采样阶段:
- 选择迭代次数 \(T\)(通常 \(T = 50\))
-
从 \(\textcolor{cornflowerblue}{x} \sim \textcolor{cornflowerblue}{p_{\text{noise}}}\) 采样
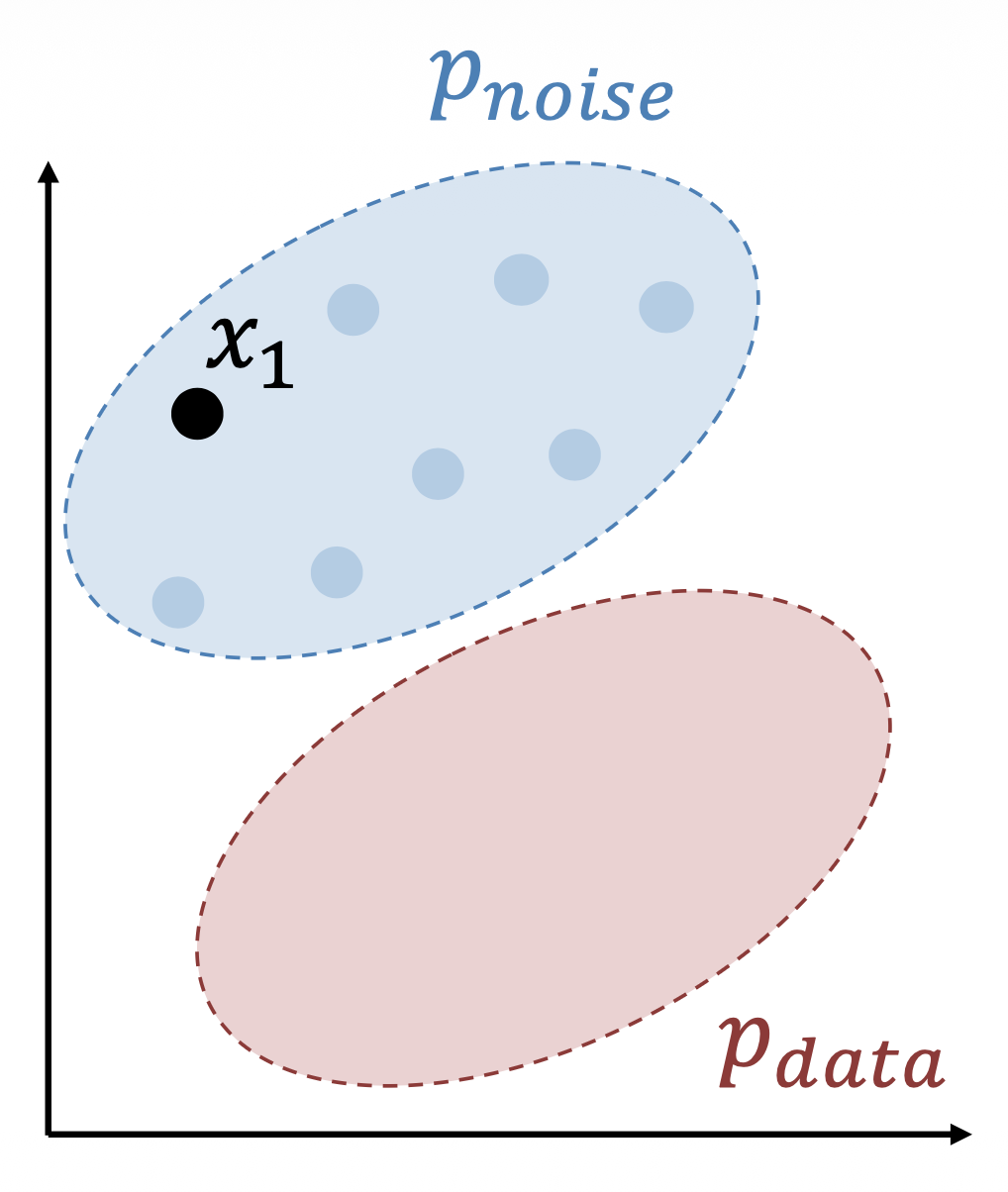
-
对于在 \([1, 1 - \dfrac{1}{T}, 1 - \dfrac{2}{T}], \dots, 0\) 内的 \(t\)
-
求解 \(\textcolor{yellowgreen}{v_t} = f_\theta(x_t, t)\)

-
\(x = x - \dfrac{v_t}{T}\)
-
-
返回 \(x\)
-
对应代码为:
Conditional Rectified Flow⚓︎
条件校正流在原版基础上有了以下修改:
-
训练:
-
采样:
Classifier-Free Guidance (CFG)⚓︎
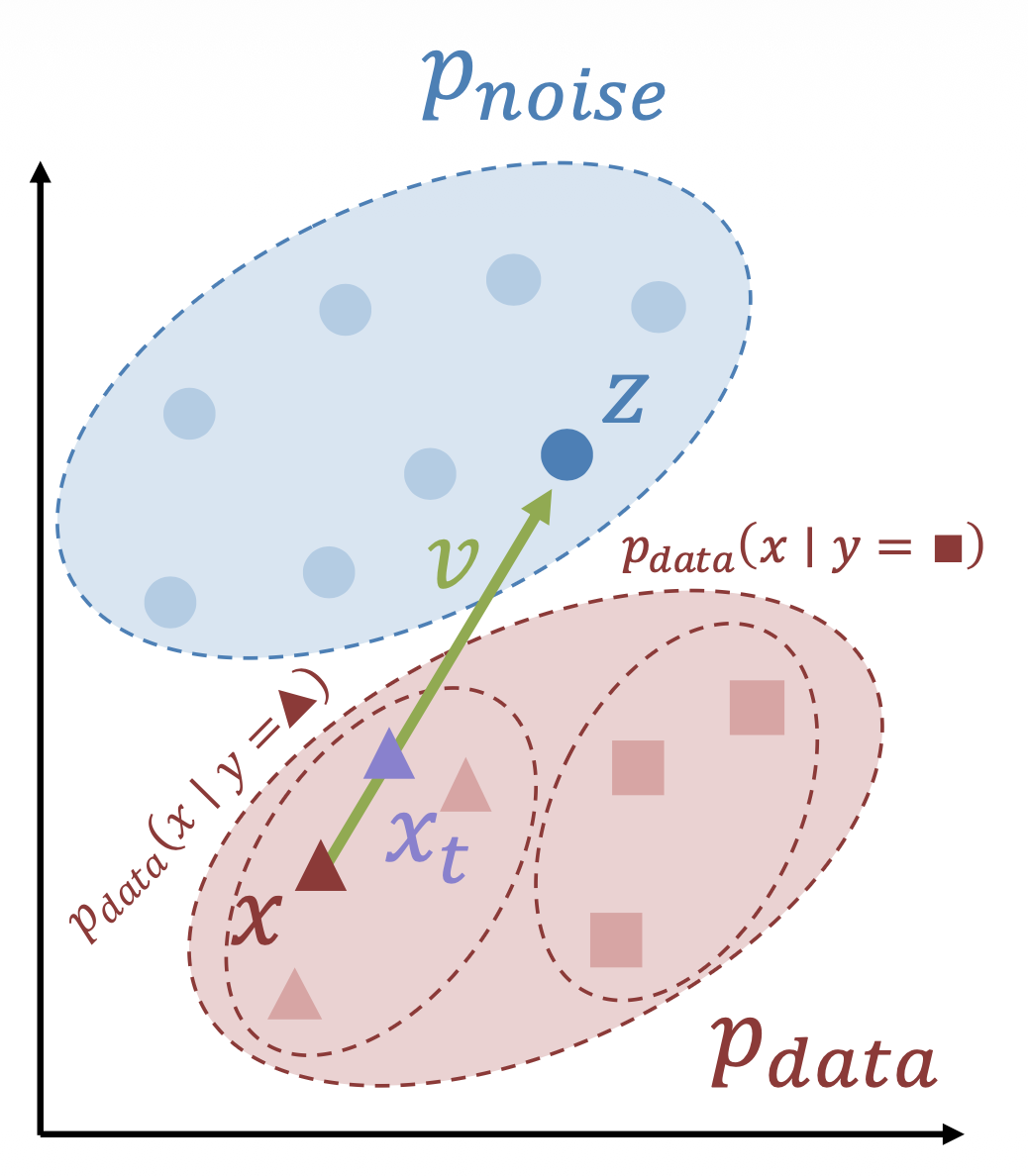
无分类器指导(classifier-free guidance, CFG) 是在条件校准流的基础上实现对条件 \(y\) 强调程度的控制。

-
训练:
for (x, y) in dataset: z = torch.randn_like(x) t = random.uniform(0, 1) xt = (1 - t) * x + t * z if random.random() < 0.5: y = y_null v = model(xt, y, t) loss = (z - x - v).square().sum()- 在训练过程中随机删除 \(y\),此时模型可同时是条件的和无条件的
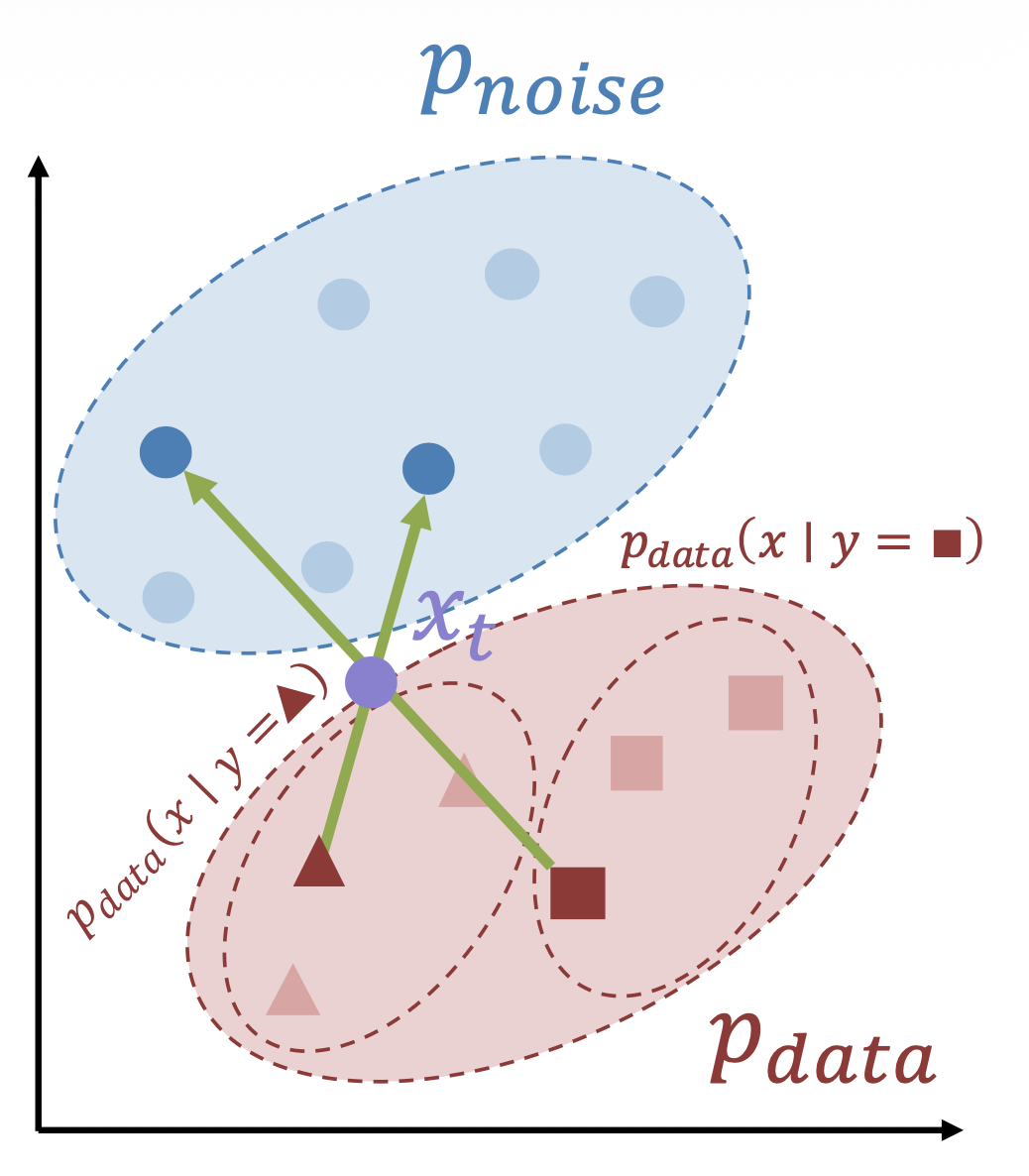
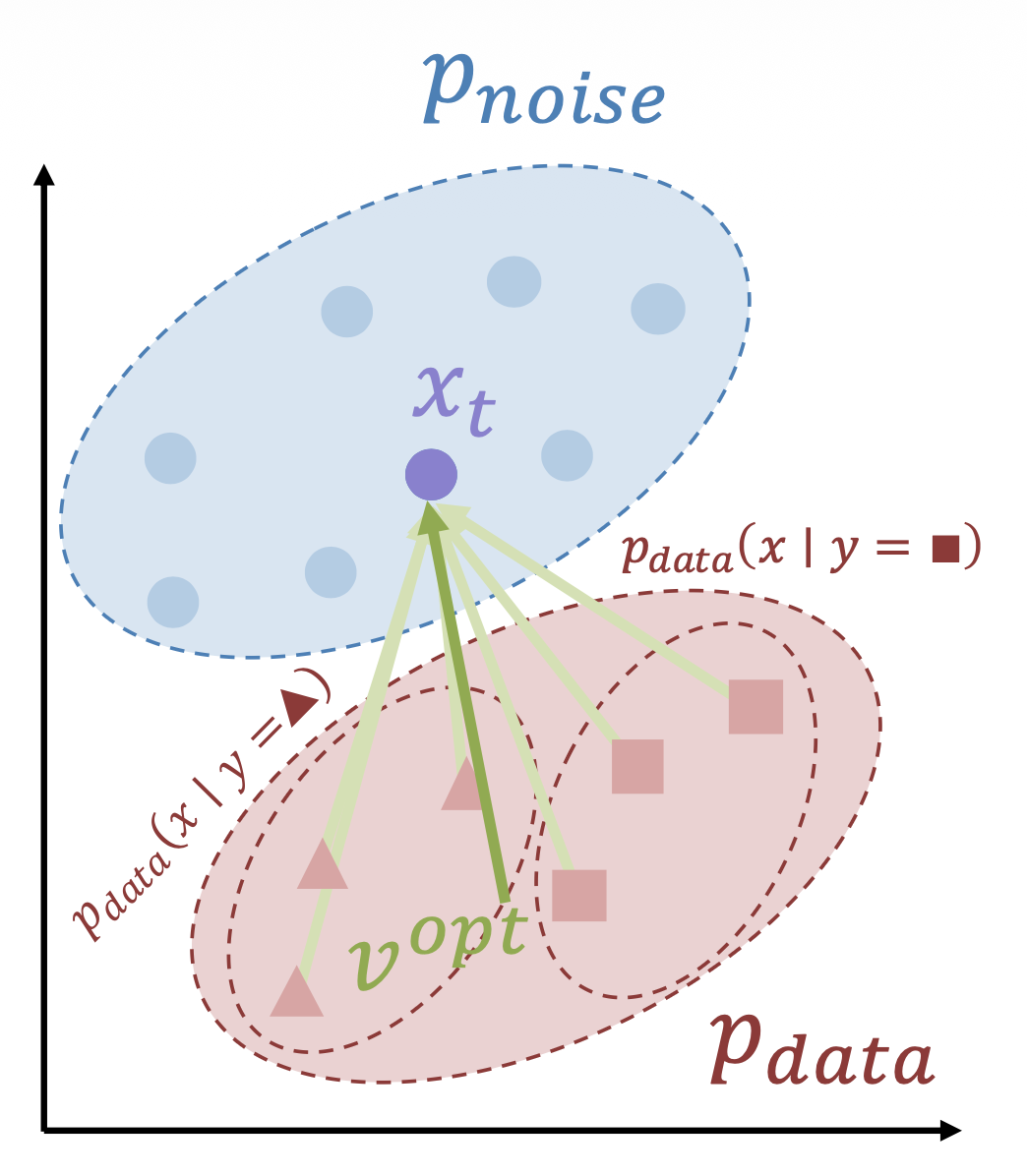
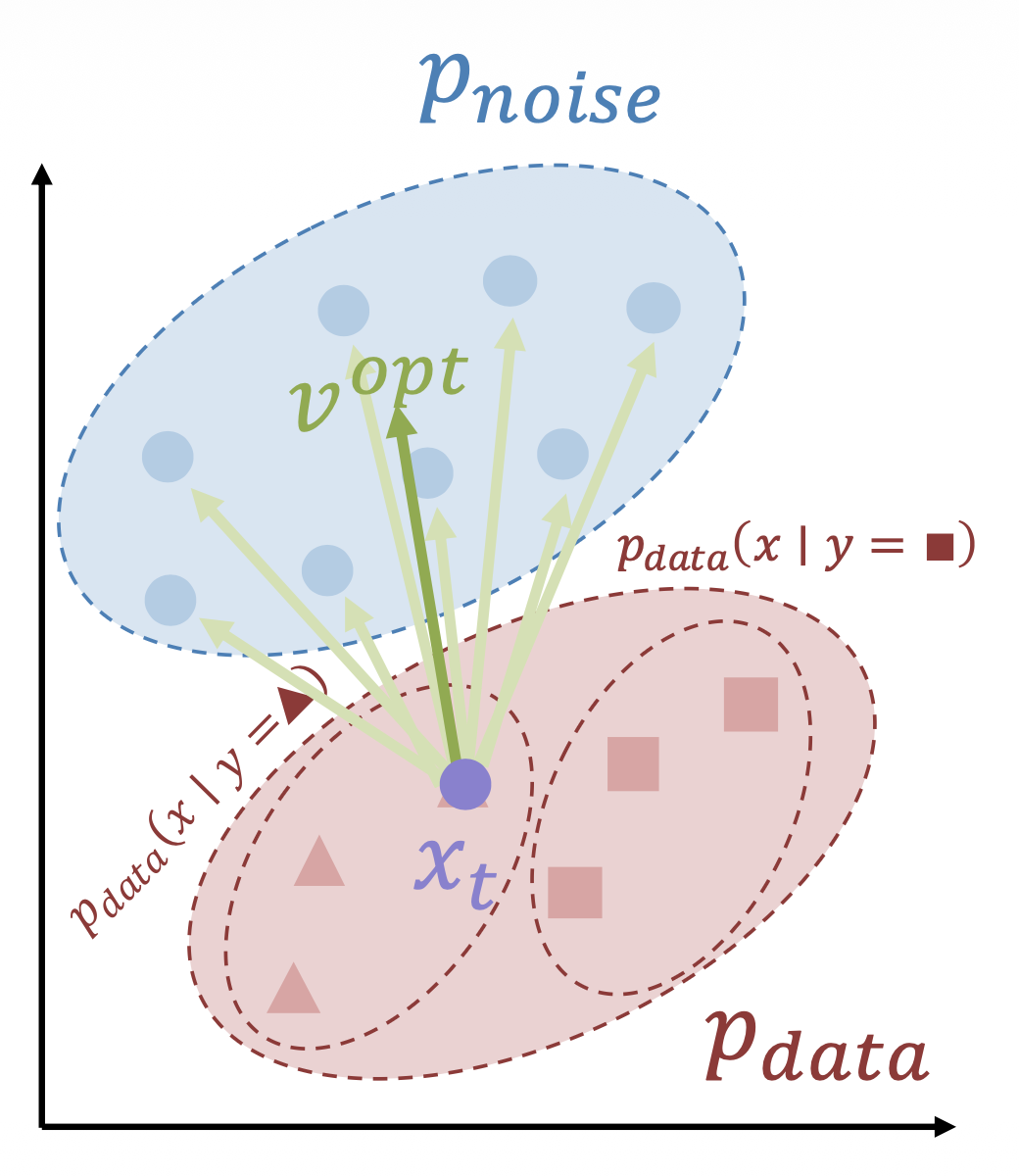
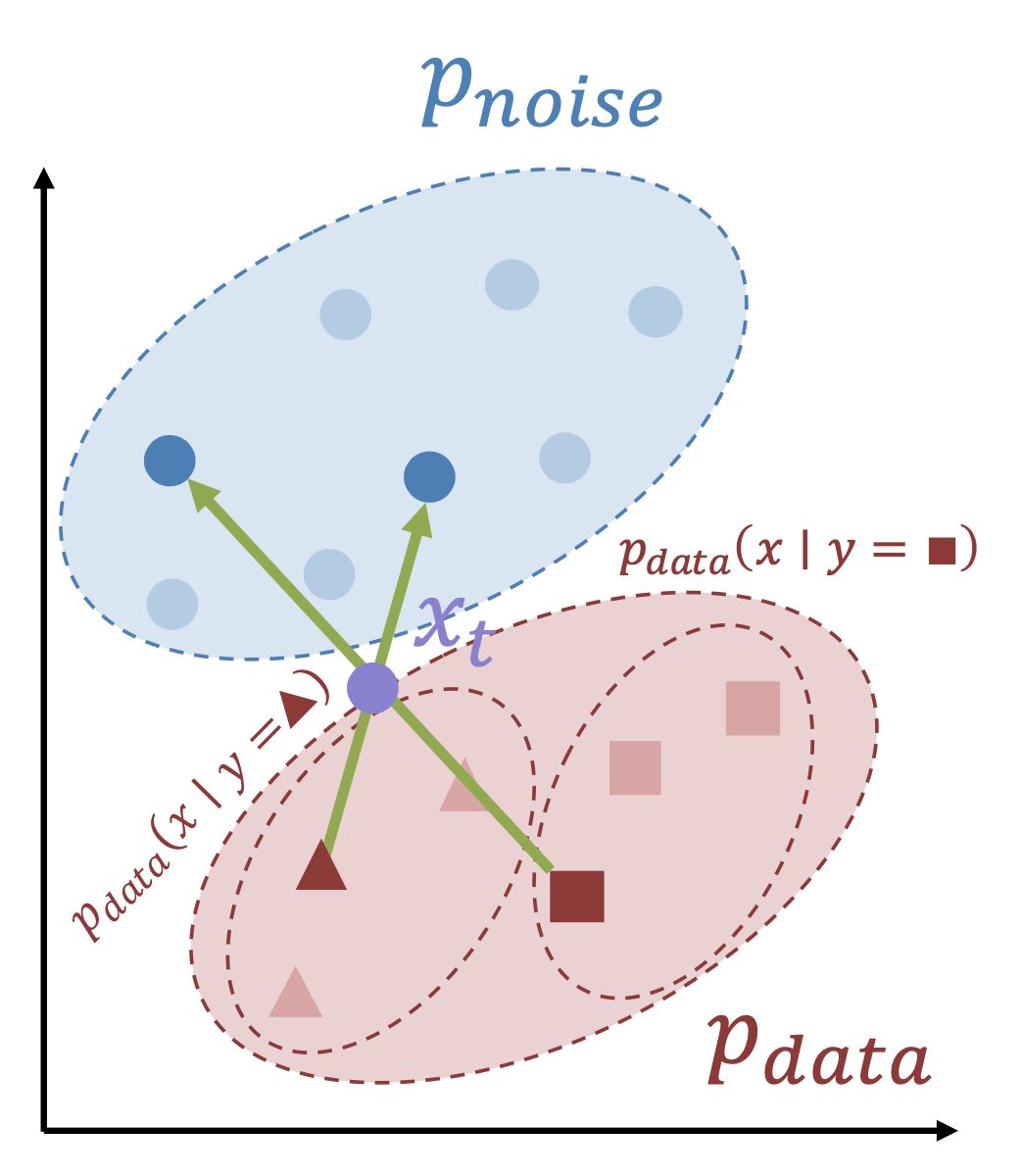
- 如右图所示,考虑噪声 \(\textcolor{plum}{x_t}\):
- \(\textcolor{orange}{v^{\emptyset} = f_\theta (x_t, y_\emptyset, t)}\) 指向 \(p(x)\)
- \(\textcolor{yellowgreen}{v^y = f_\theta (x_t, y, t)}\) 指向 \(p(x | y)\)
- \(\textcolor{cornflowerblue}{v^{cfg}} = (1 + w)\textcolor{yellowgreen}{v^y} - w \textcolor{orange}{v^{\emptyset}}\) 更多指向 \(p(x | y)\)
- 在采样过程中,根据 \(\textcolor{cornflowerblue}{v^{cfg}}\) 步进
-
采样:
y = user_input() sample = torch.randn(x_shape) for t in torch.linspace(1, 0, num_steps): vy = model(sample, y, t) v0 = model(sample, y_null, t) v = (1 + w) * vy - w * v0 sample = sample - v / num_steps- 实际上到处使用,对于高质量的输出而言非常重要
- 问题:采样成本加倍
之所以叫做 "classifier-free",是因为先前的方法使用单独的判别模型 \(p(y|x)\) 来计算步进方向 \(\dfrac{\partial}{\partial x} \log p(y|x)\) 的。
Optimal Prediction (Noise Schedules)⚓︎
上述方法中,存在多个 \((x, z)\) 对给出相同的 \(x_t\),网络必须计算它们的平均值
-
完全噪声(\(t=1\))很容易:最优的 \(v\) 是 \(p_\text{data}\) 的均值
-
没有噪声(\(t=1\))也很容易:最优的 \(v\) 是 \(p_\text{noise}\) 的均值
-
中间的噪声是最困难也是最模糊的,但问题是我们为所有的噪声等级赋予了相同的权重
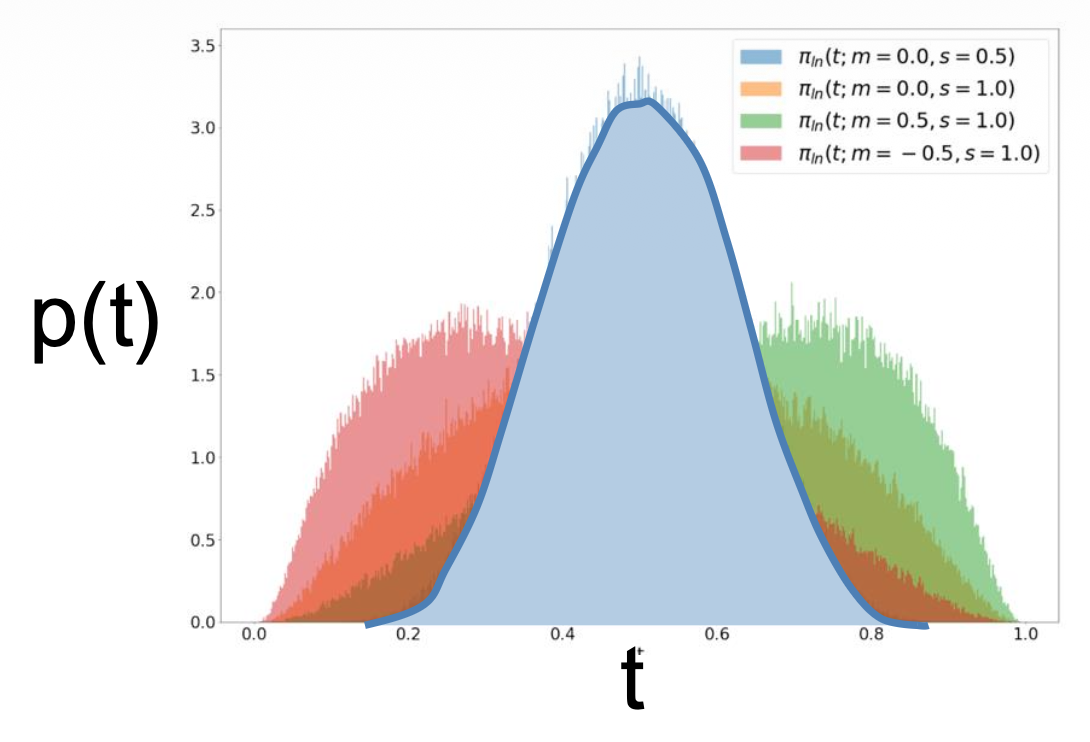
解决方法:使用非均匀噪声调度(noise schedule)。
- 在中间多放置一些噪声
-
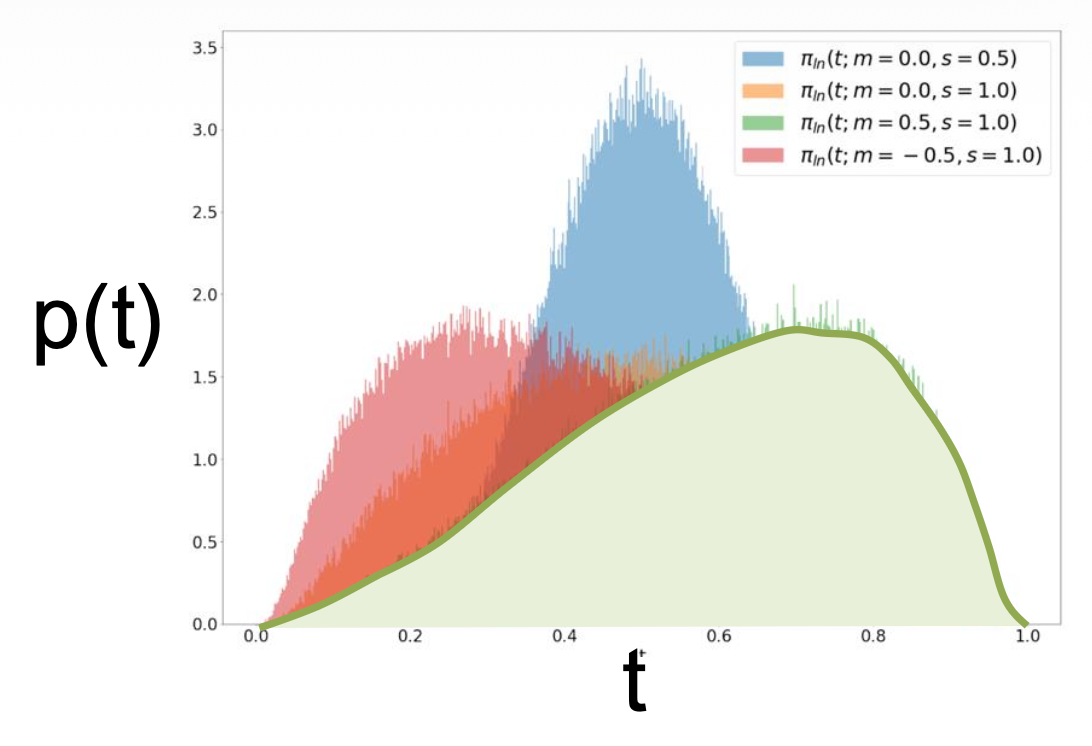
常用方法:对数正态采样(logit normal sampling)
-
对于高分辨率区域,考虑像素相关性,通常转向更高的噪声
对应代码如下:
for (x, y) in dataset:
z = torch.randn_like(x)
t = torch.randn(()).sigmoid()
xt = (1 - t) * x + t * z
if random.random() < 0.5: y = y_null
v = model(xt, y, t)
loss = (z - x - v).square().sum()
- 优点:对于多数生成式建模问题而言是简单且可扩展的设置
- 缺点:无法在高分辨率数据上简单工作
Latent Diffusion Models (LDMs)⚓︎
潜扩散模型(latent diffusion models, LDMs) 的思路为:
-
训练编码器 + 解码器,将图像转换为潜变量(latent)
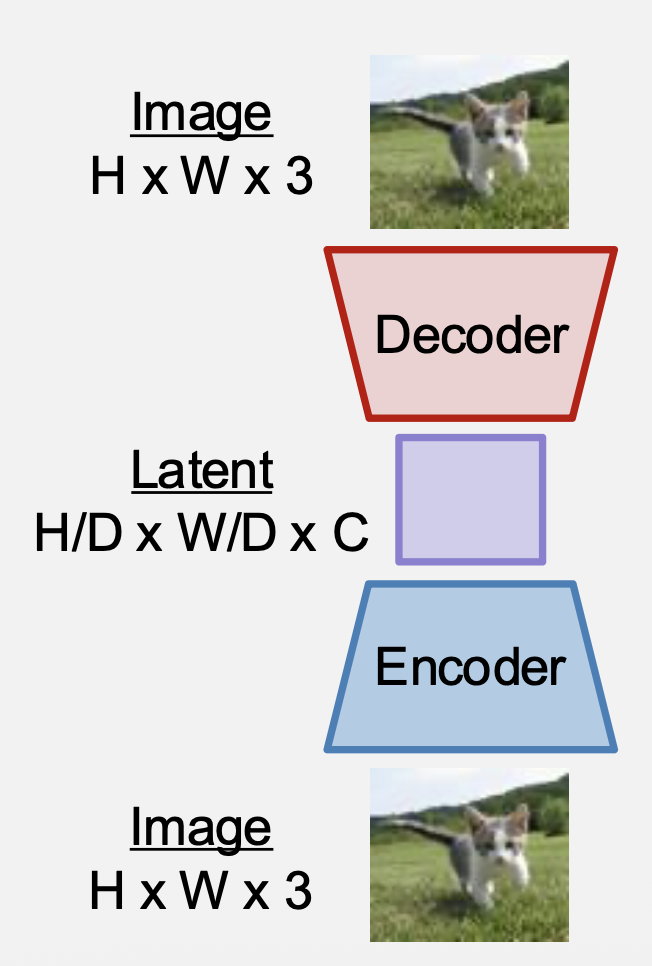
- 常用设置:D=8, C=16
- 图像(256x256x3)=> 潜变量(32x32x16)
- 编码器和解码器是带注意力的 CNNs
-
训练扩散模型,以移除潜变量的噪声(编码器被固定住)
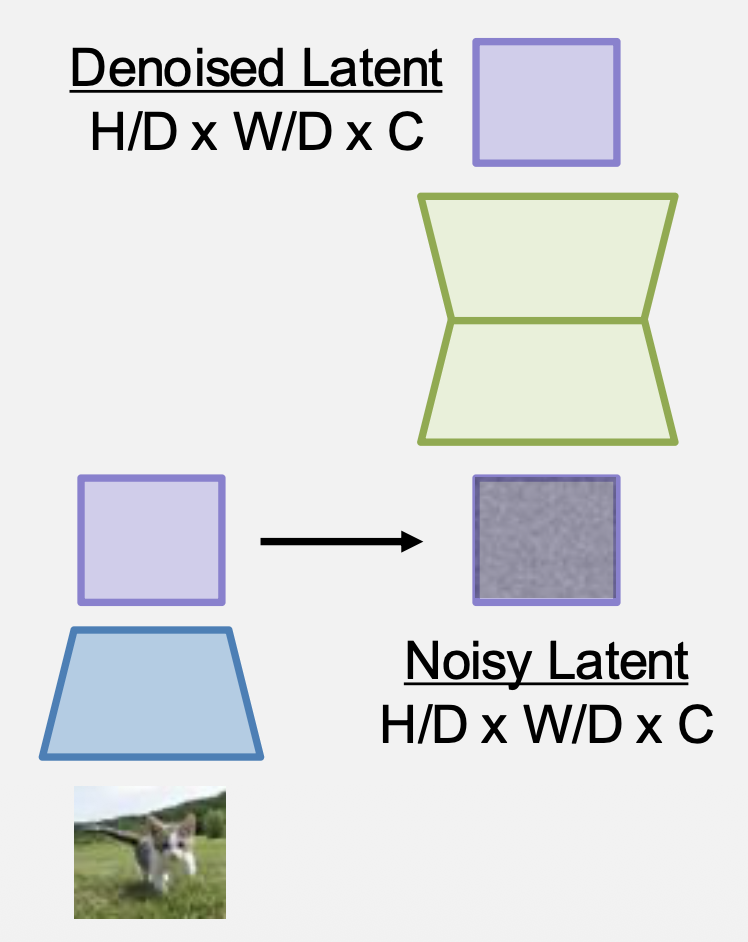
-
训练后:
- 采样随机潜变量
- 迭代应用训练模型以移除噪声
- 运行解码器以获得图像

潜扩散是目前最常用的形式。
不难发现,这种架构也是一种 VAE,而且带有很小的 KL 先验权重。所以就按 VAE 的训练方式来训练编码器和解码器。
但有一个问题:解码器的输出不确定 (blurry)。解决方案是加一个判别器,形成类似 GAN 的架构。
综上,现代的 LDM 流水线是 VAE + GAN + 扩散的结合。
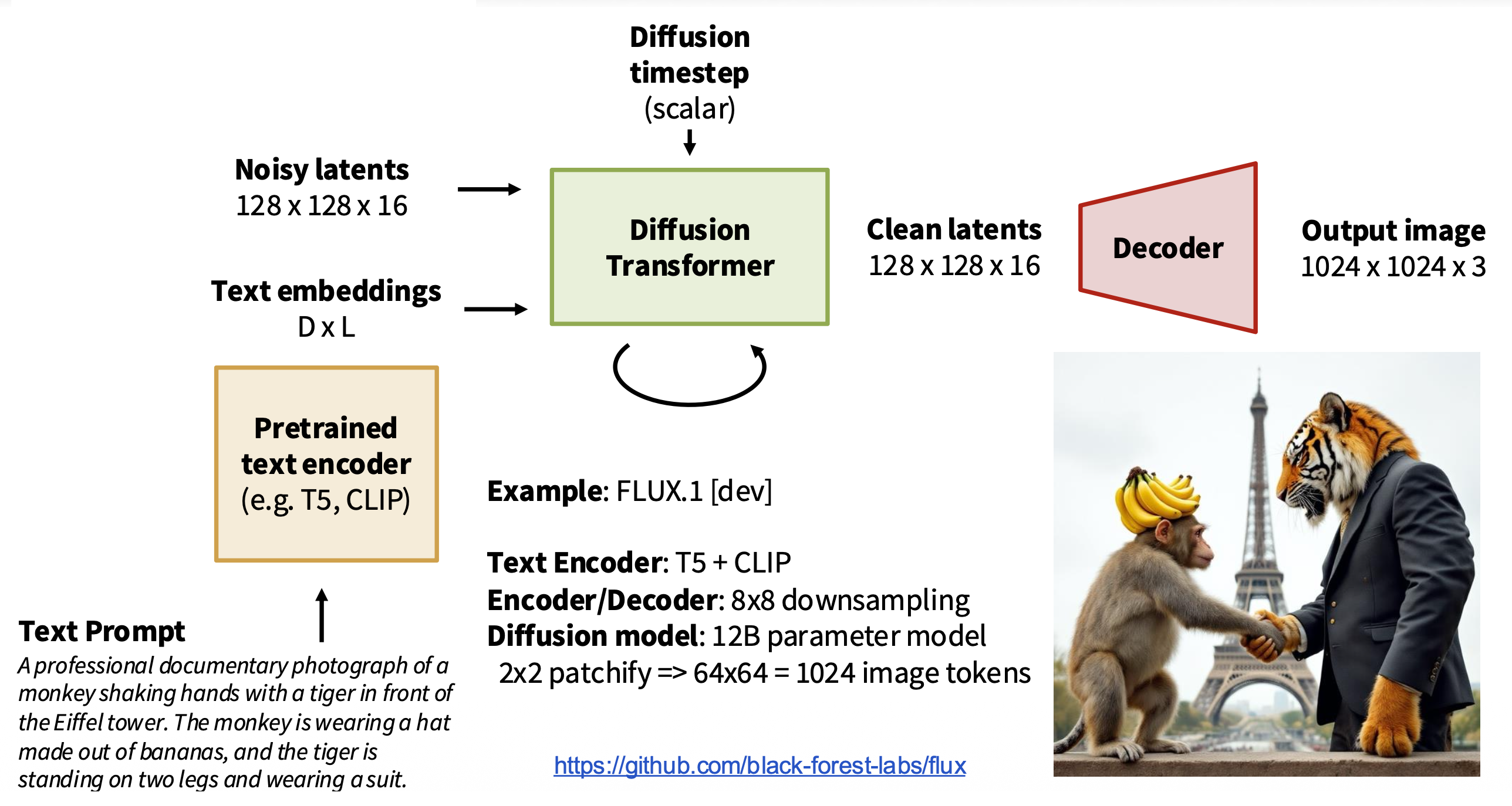
Diffusion Transformer (DiT)⚓︎
扩散模型采用标准的 Transformer 块。
主要问题:如何注入条件(时间步 t,文本 ...
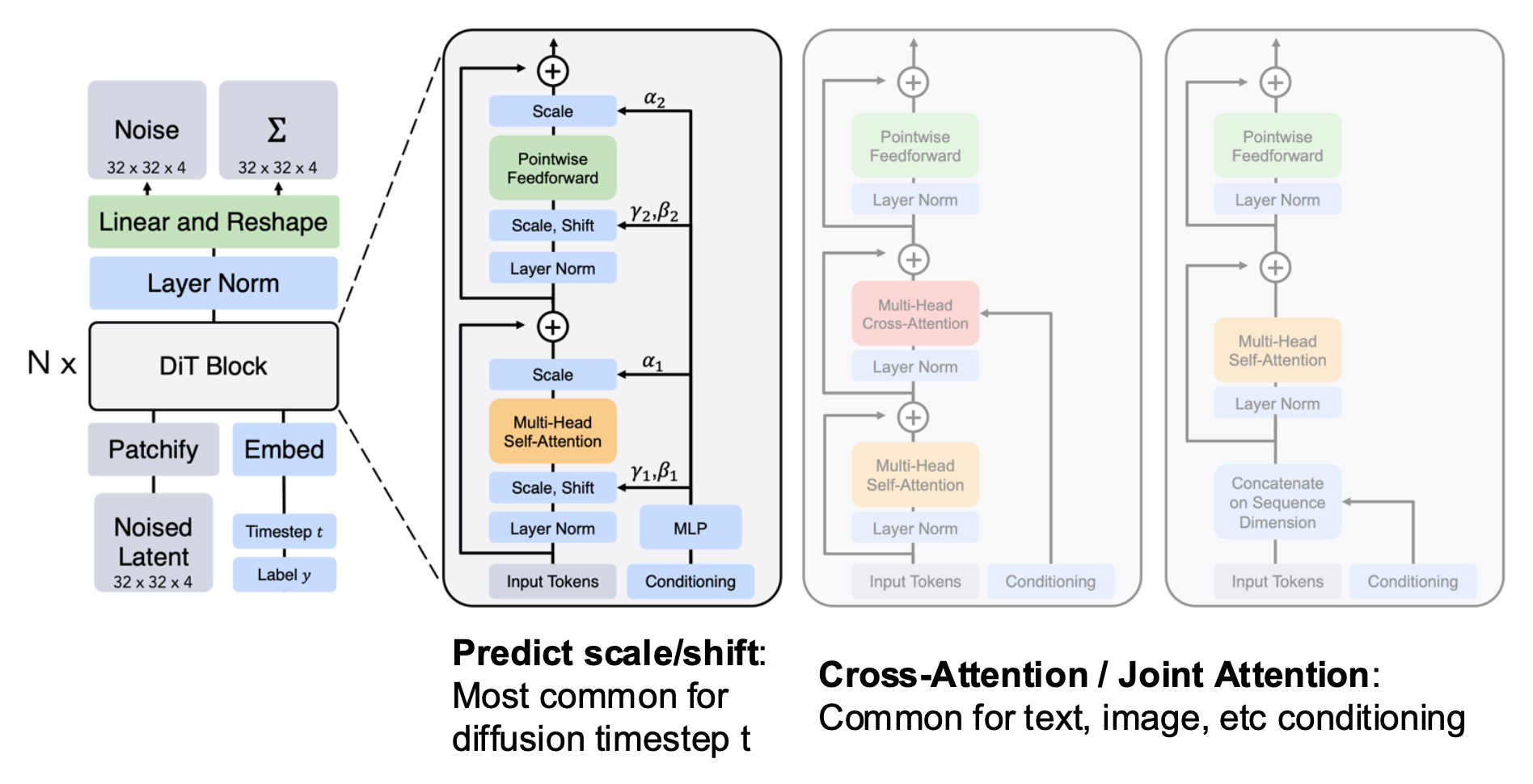
- 预测尺度 / 偏移:常用于扩散时间步 t
- 交叉注意 / 联合注意:常用于文本、图像等条件
Text-to-Image⚓︎
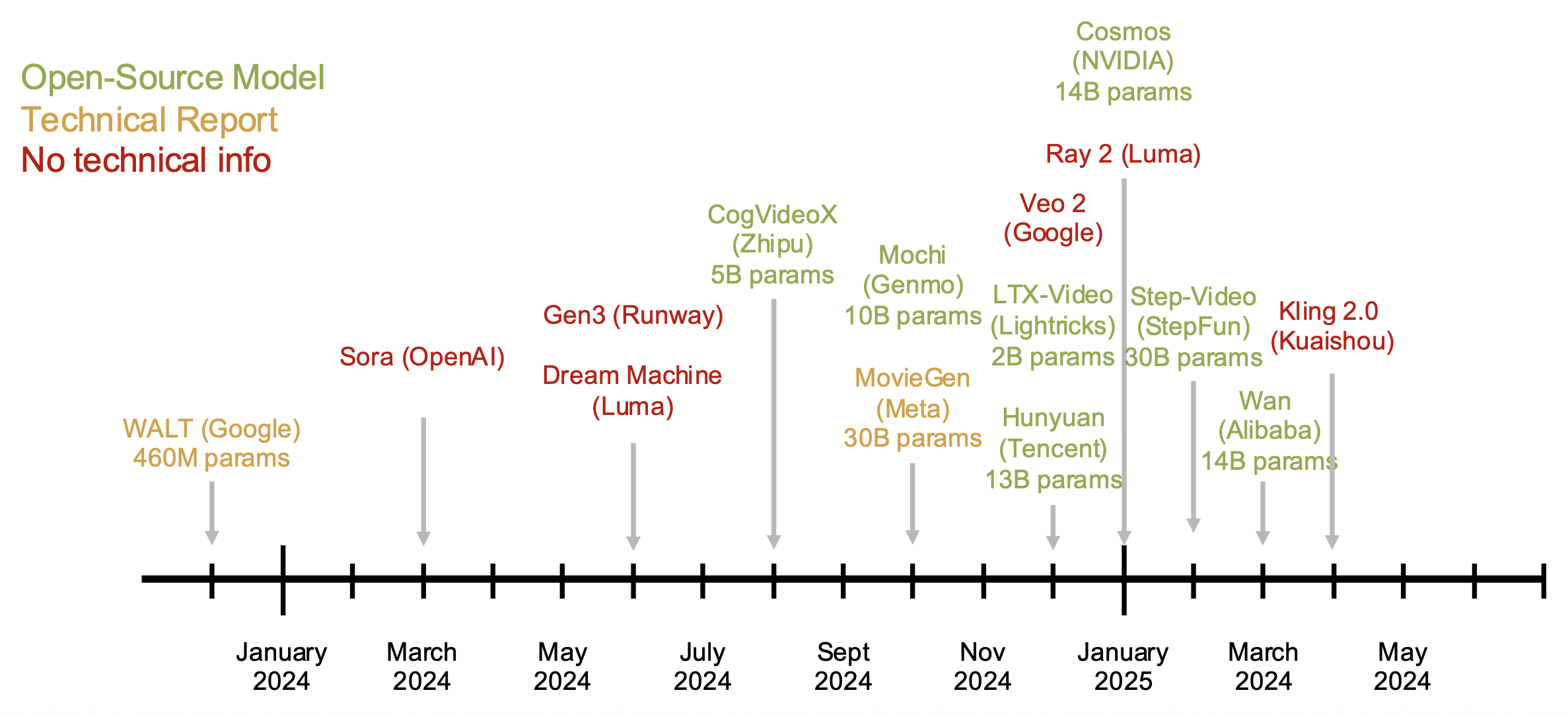
Text-to-Video⚓︎

视频扩散模型的时代:
Diffusion Distillation⚓︎
问题
在采样过程中,我们需要多次运行扩散模型(在校正流中大约是 30-50 次
解决方案:使用蒸馏算法(distillation algorithms),减少步数。该方法也可在 CFG(无分类器指导)中烘培。
相关论文
- Salimans and Ho, “Progressive Distillation for Fast Sampling of Diffusion Models”, ICLR 2022
- Song et al, “Consistency Models”, ICML 2023
- Sauer et al, “Adversarial Diffusion Distillation”, ECCV 2024
- Sauer et al, “Fast High-Resolution Image Synthesis with Latent Adversarial Diffusion Distillation”, arXiv 2024
- Lu and Song, “Simplifying, Stabilizing and Scaling Consistency Models”, ICLR 2025
- Salimans et al, “Multistep Distillation of Diffusion Models via Moment Matching”, NeurIPS 2025
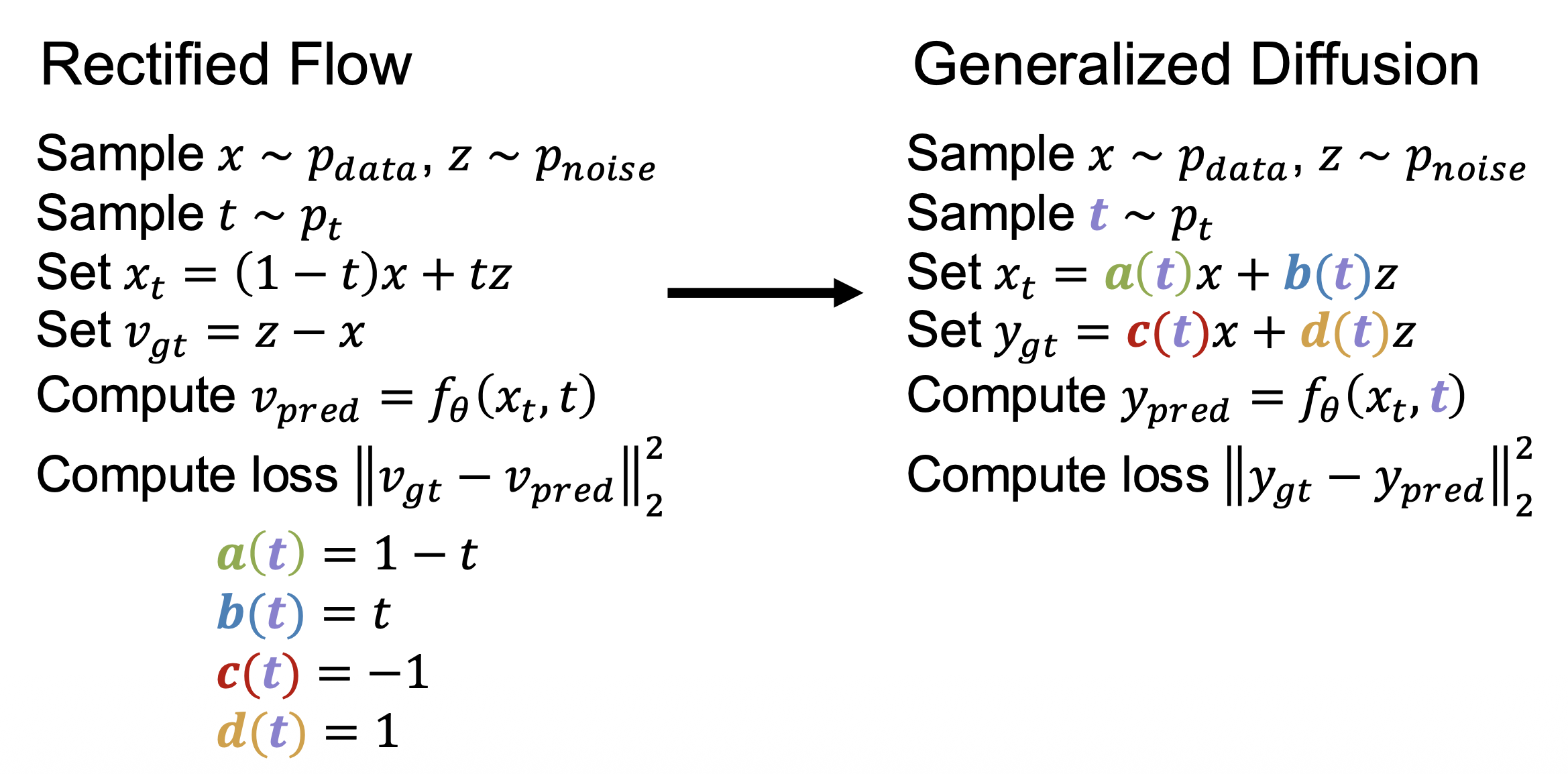
Generalized Diffusion⚓︎
广义扩散(generalized diffusion) 模型的数学公式如下图右侧所示(和校正流对应
各种变体:
-
方差保留(variance preserving, VP):
- \(a(t) = \sqrt{\sigma(t)}\)
- \(b(t) = \sqrt{1 - \sigma(t)}\)
- 若 \(x, z\) 独立且方差为 1,那么 \(x_t\) 的方差也为 1
-
方差爆炸(variance exploding, VE):
- \(a(t) = 1\)
- \(b(t) = \sqrt{\sigma(t)}\)
- \(\sigma(1)\) 需要足够大,以抽取在 \(x\) 中的全部信号
-
\(x\)- 预测
\[ y_{gt} = x \quad [\textcolor{red}{c(}\textcolor{plum}{t}\textcolor{red}{)} = 1; \textcolor{orange}{d(}\textcolor{plum}{t}\textcolor{orange}{)} = 0] \] -
\(\varepsilon\)- 预测
\[ y_{gt} = \bm{z} \quad [\textcolor{red}{c(}\textcolor{plum}{t}\textcolor{red}{)} = 1; \textcolor{orange}{d(}\textcolor{plum}{t}\textcolor{orange}{)} = 0] \] -
\(v\)- 预测
\[ y_{gt} = \textcolor{cornflowerblue}{b(}\textcolor{plum}{t}\textcolor{cornflowerblue}{)} z - \textcolor{yellowgreen}{a(}\textcolor{plum}{t}\textcolor{yellowgreen}{)} x \quad [\textcolor{red}{c(}\textcolor{plum}{t}\textcolor{red}{)} = \textcolor{cornflowerblue}{b(}\textcolor{plum}{t}\textcolor{cornflowerblue}{)}; \textcolor{orange}{d(}\textcolor{plum}{t}\textcolor{orange}{)} = -\textcolor{yellowgreen}{a(}\textcolor{plum}{t}\textcolor{yellowgreen}{)}] \]
通常通过一些数学形式主义 (mathematical formalism) 来选择上述函数。
Miscellaneous⚓︎
-
扩散是一个潜变量模型
-
前向过程:增加高斯噪声

-
学习一个用于近似后向过程的网络
- 优化变分下界(和 VAE 一样)
-
-
扩散习得一个分数函数
-
对于任意在 \(x \in \mathbb{R}^N\) 上的分布 \(p(x)\),分数函数
\[ s: \mathbb{R}^N \rightarrow \mathbb{R}^N \quad s(x) = \dfrac{\partial}{\partial x} \log p(x) \]是一个指向高概率密度区域的向量场
-
扩散习得一个用于逼近关于 \(p_\text{data}\) 的分数函数的神经网络
-
-
扩散能解出随机微分方程 (stochastic differential equations, SDE)
-
我们能以 SDE 形式描述一个连续的增加噪声过程
\[ d\bm{x} = f(\bm{x}, t) dt + g(t) d\bm{w} \] -
上式给出了数据 \(x\)、时间 \(t\) 和噪声 \(w\) 之间的无穷小 (infinitesimal) 变化关系
- 扩散习得一个用于近似求解该 SDE 的神经网络
-
-
扩散的不同视角:
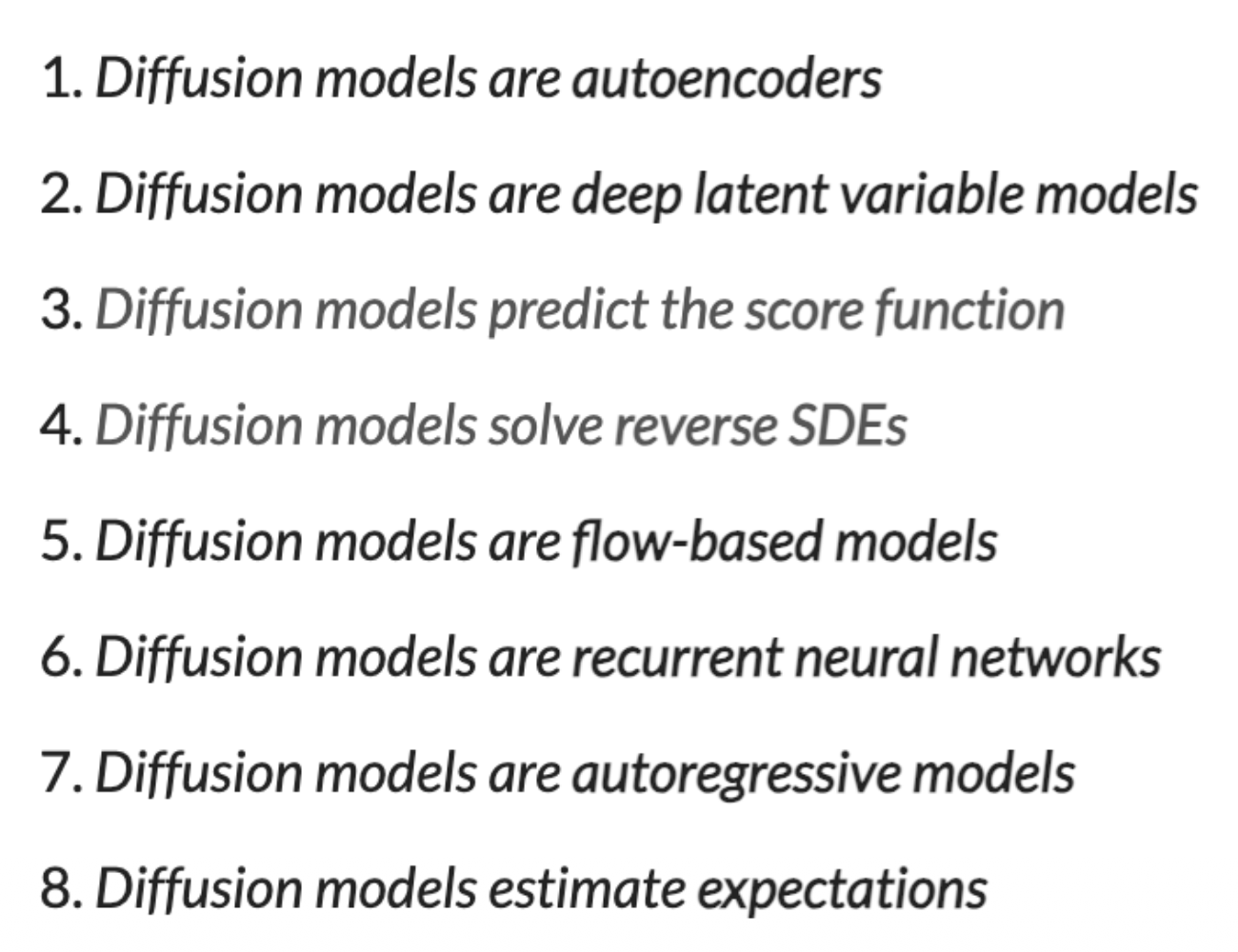
截图来自 Sander Dieleman 的博客。
评论区