Life-long Learning⚓︎
约 2610 个字 预计阅读时间 13 分钟
看到“终身学习”(life-long learning) 这样的标题,我们脑海中首先想到的可能是关于我们人类的终身学习,也就是“活到老,学到老”——不过本讲要介绍的是关于机器的终身学习。在还没学过机器学习相关知识前,我们对 AI 的想象也许是像下图这样:机器能一直从不同的任务重学习新技能,最终形成像《终结者》电影里的“天网”。
注:在机器学习中,终身学习还有像 continue learning, never ending learning, incremental learning 等同义词。
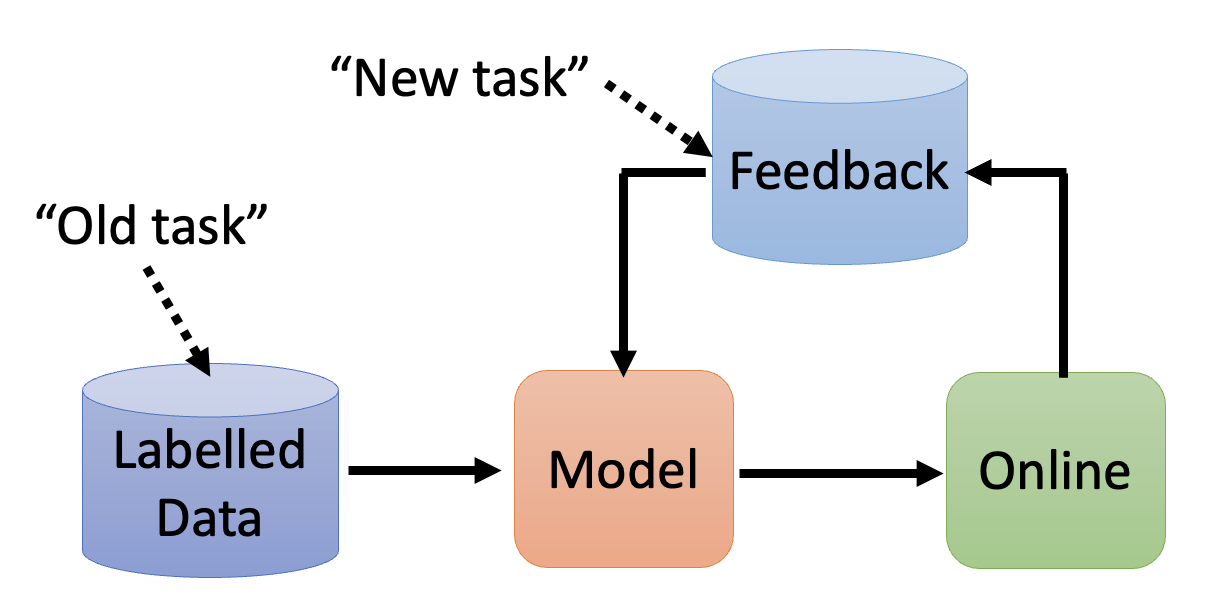
在现实应用中,终身学习的流程大概如下图所示那样:
例子
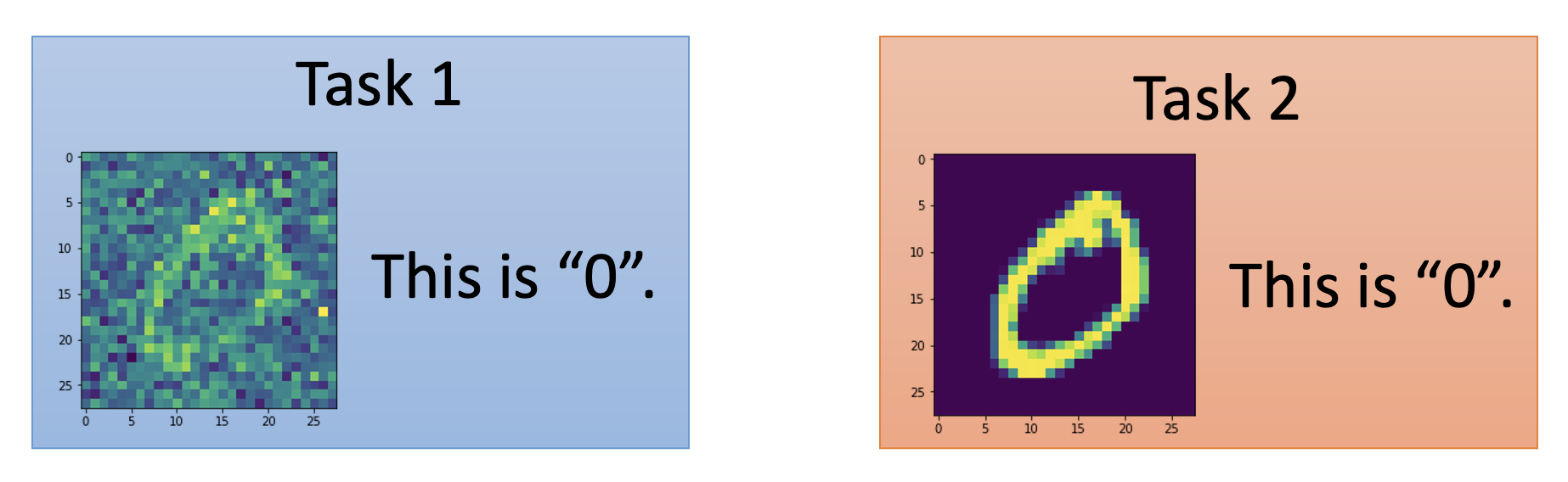
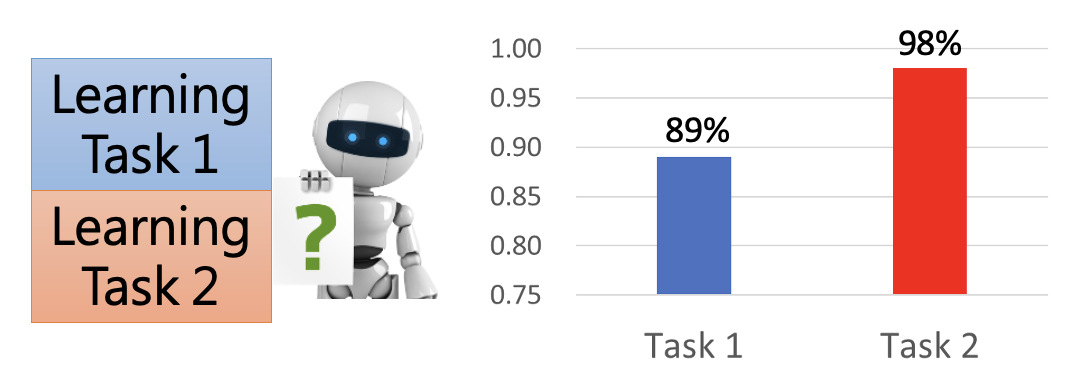
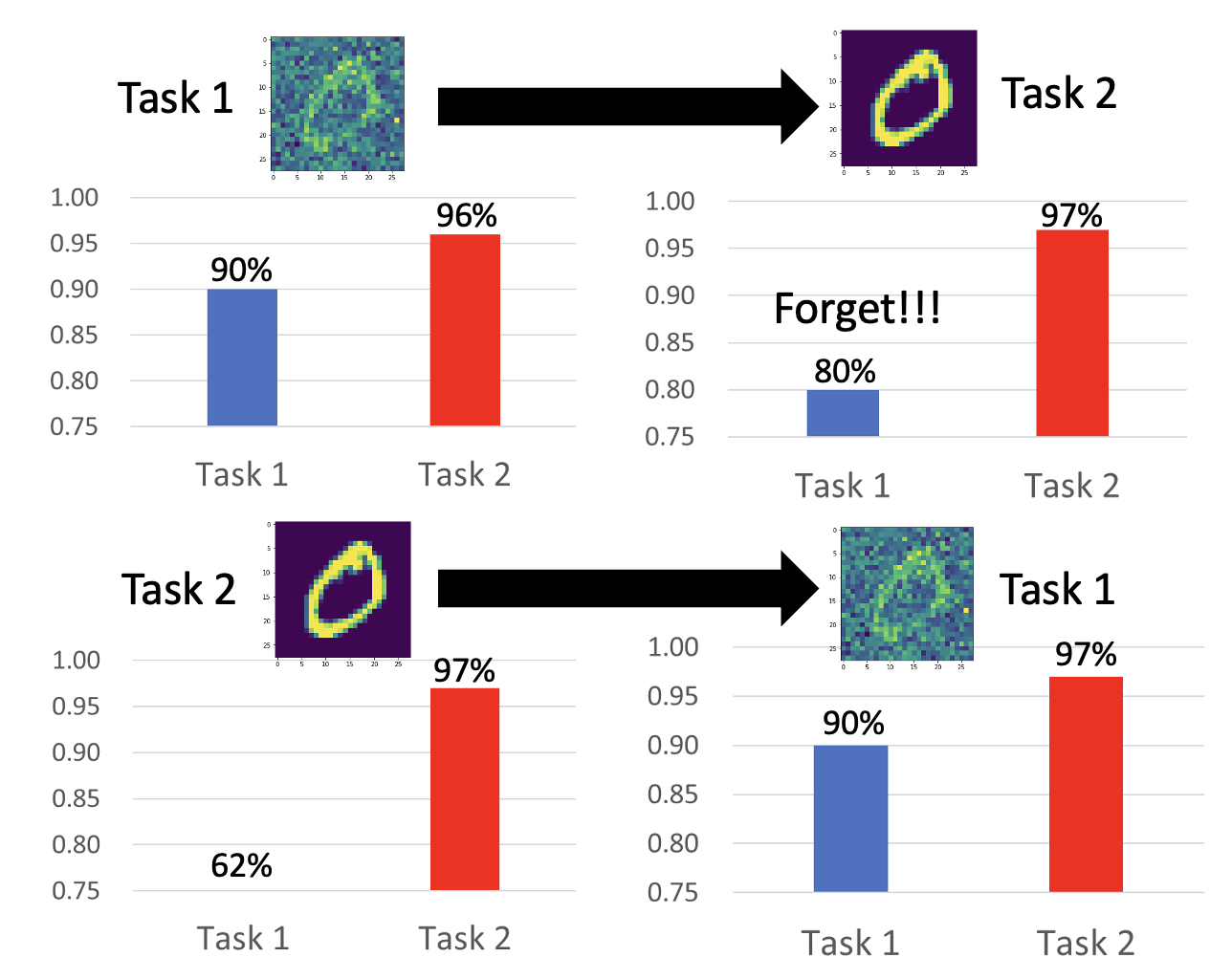
假如现在让一个简单的模型(只有 3 层,每层 50 个神经元)来完成下面两个手写数字识别任务:
如果先用任务 1 训练,再用任务 2 训练,得到的结果如下:
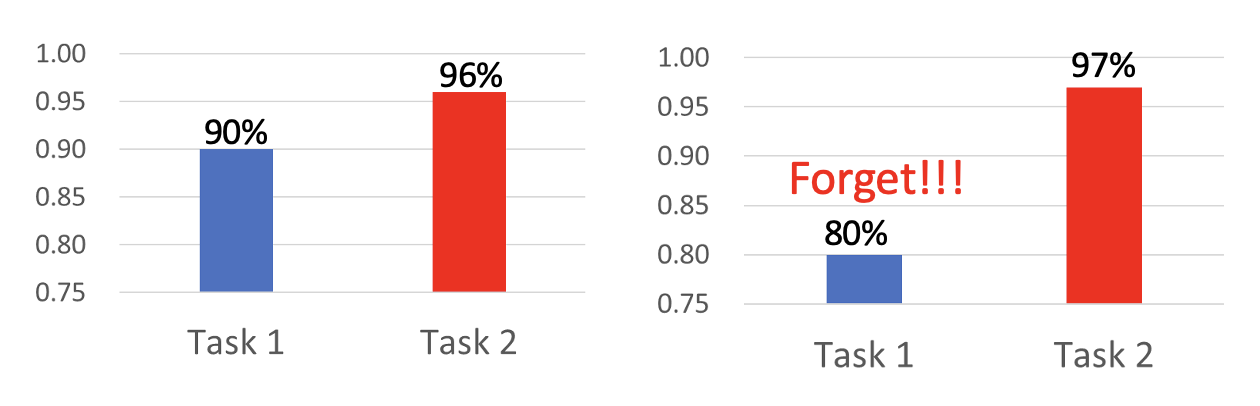
可以看到,模型能够仅根据任务 1 的训练掌握了一定的完成任务 2 的能力,而且接着在任务 2 上训练能够继续提升该能力。但是在任务 2 上训练后,模型在任务 1 上的能力是明显下降的,说明模型对任务 1 有所“遗忘”。
然而,如果让模型同时从任务 1 和任务 2 学习,那么模型能够在两个任务中同时取得不错的表现,这说明不是模型本身能力的不足,而是在一个接一个的训练中存在一些问题。
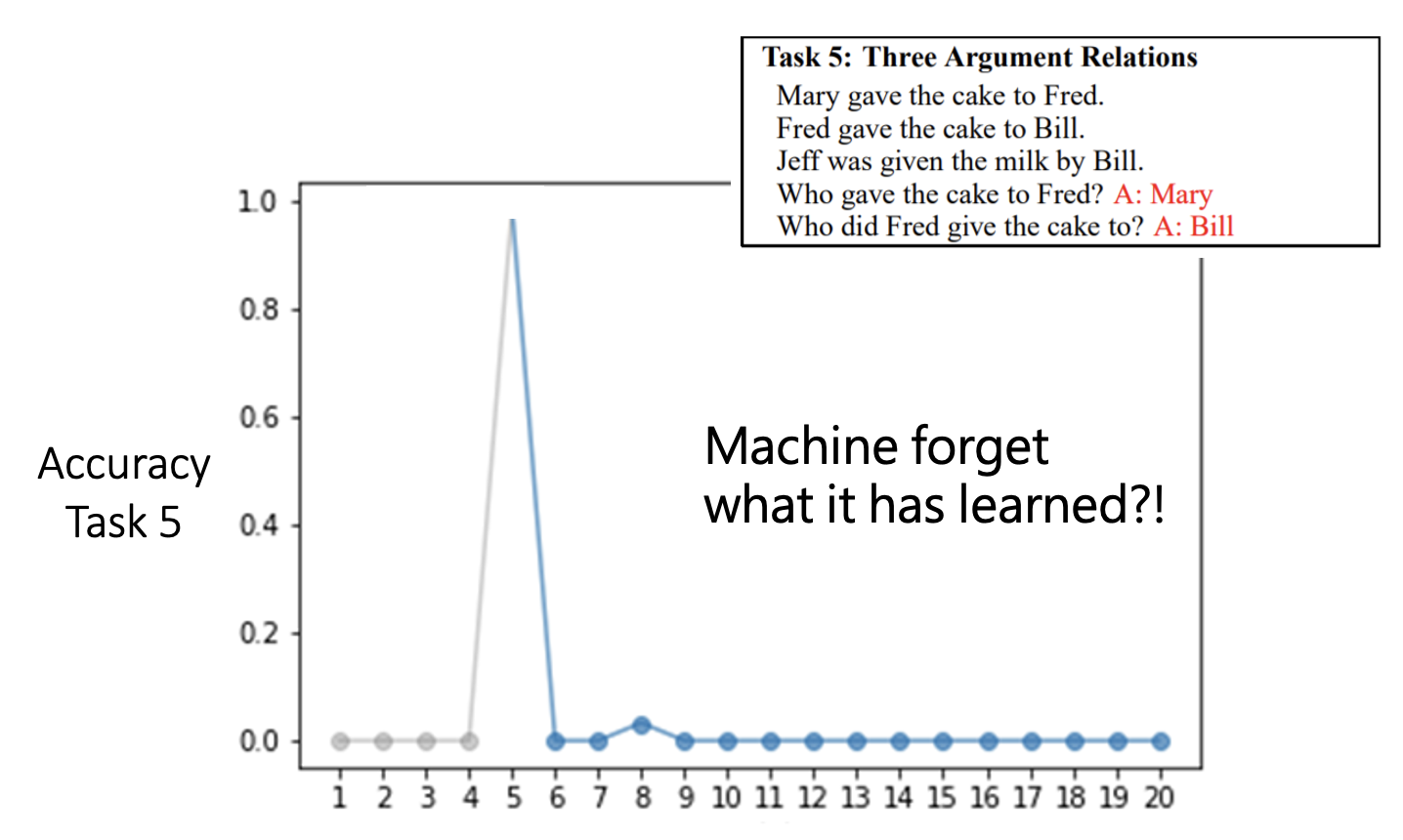
另一个例子是在 bAbi 语料库上训练一个 QA 模型,其中 bAbi 语料库包含了 20 个简单的 QA 任务,如下所示:

如果是按任务顺序一个个来训练模型的话,模型在任务 5 上的准确率如下所示,可以看到只有在训练完任务 5 的那一刻,模型才能在任务 5 上取得较高的准确率,而无论在之前(没有训练过)还是之后(忘记了)准确率都很低。
但如果让模型同时在 20 个任务上进行训练的话,模型在每一个任务上的准确率基本都很高。
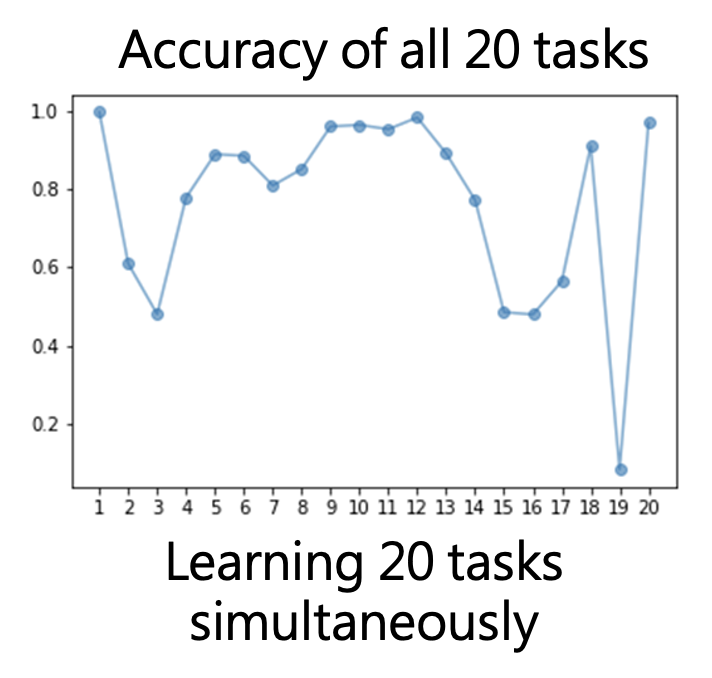
这就说明了不是模型没能力学得更好,而是它没有做到这么好,正如孟子所说
鉴于模型糟糕的记忆力,我们将这种现象称为灾难性遗忘(catastrophic forgetting)。
从前面的 2 个例子中不难发现,多任务训练(multi-task learning) 比所谓的终身学习效果更好,那为什么不这么做呢?
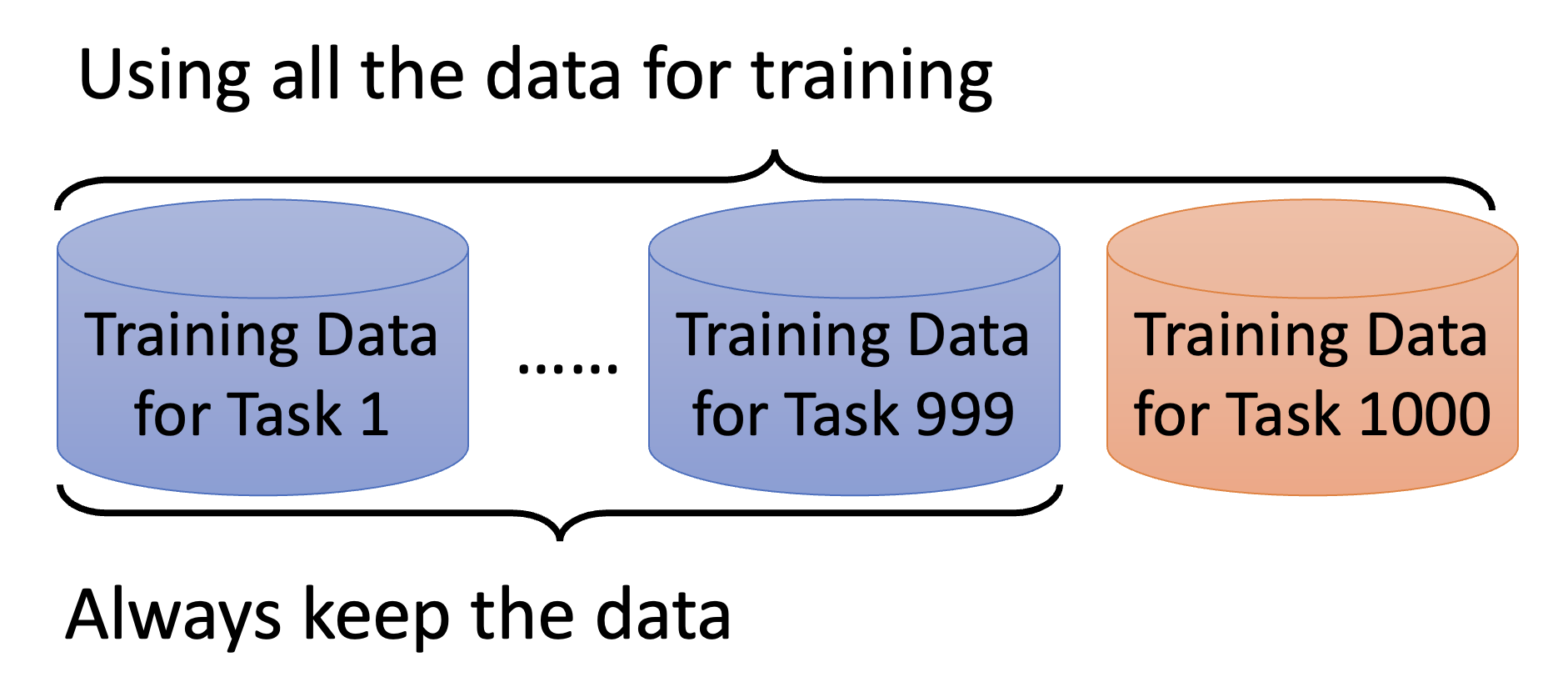
- 之前任务的数据都要保留下来,这会让存储空间变得更紧张
- 训练的时候要拿前面所有的数据一起训练,计算十分缓慢
不过由于多任务训练的效果更好,因此其结果常常作为终身学习的上界。
另一个思路是为每个任务训练不同的模型(“术业有专攻”
- 但每个模型都有各自的参数,也需要存储起来,一旦任务多起来后模型参数量就会很大,到最后也会更快耗尽存储空间。
- 还有一个问题是不同的模型无法迁移各自从不同任务中学到的知识,缺少“举一反三”的能力
终身学习和迁移学习(transfer learning) 的原理是差不多的,但最大的区别在于:
- 迁移学习要求在学完任务 1 后就能具备解决任务 2 的能力,至于机器之后还能不能完成任务 1 则不是我们要关心的
- 终身学习要求即便在学完任务 2 后,模型仍然具备完成任务 1 的能力
Evaluation⚓︎
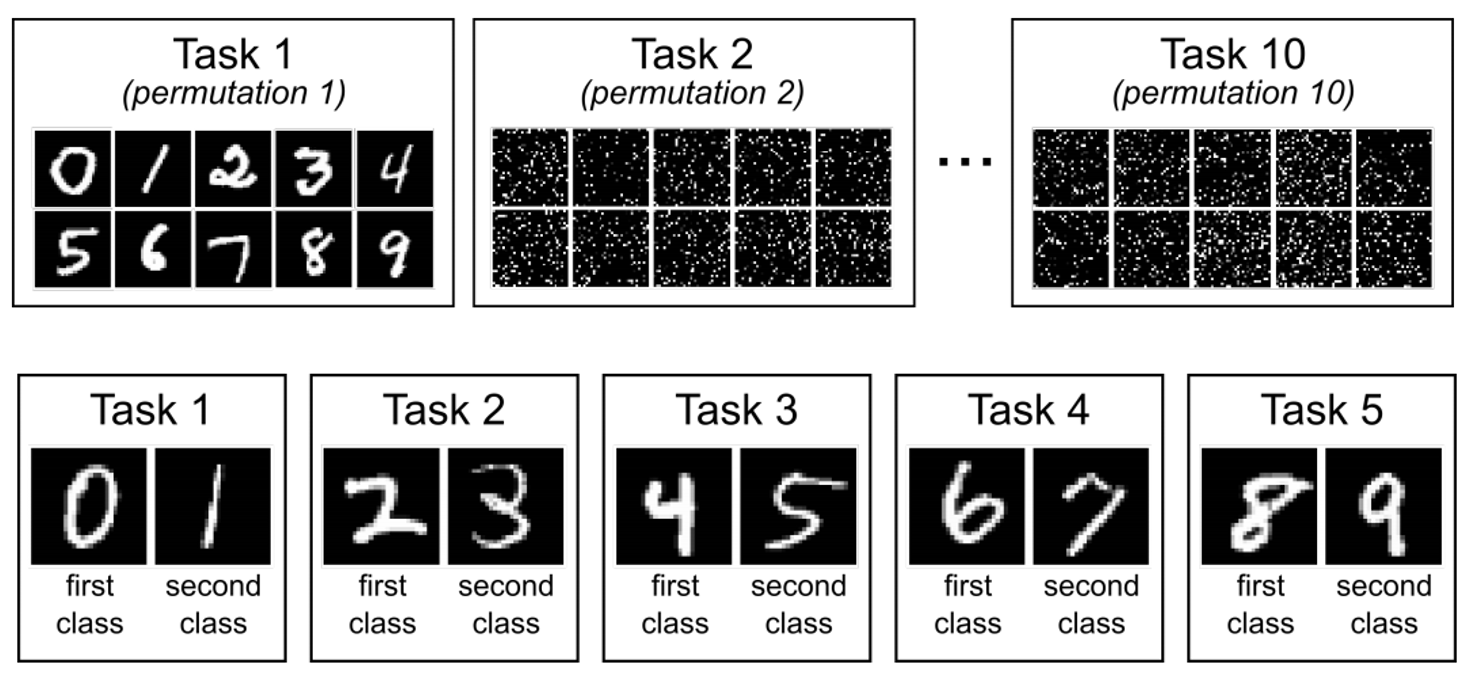
在评估终身学习的效果前,我们需要准备好一个任务序列,比如:
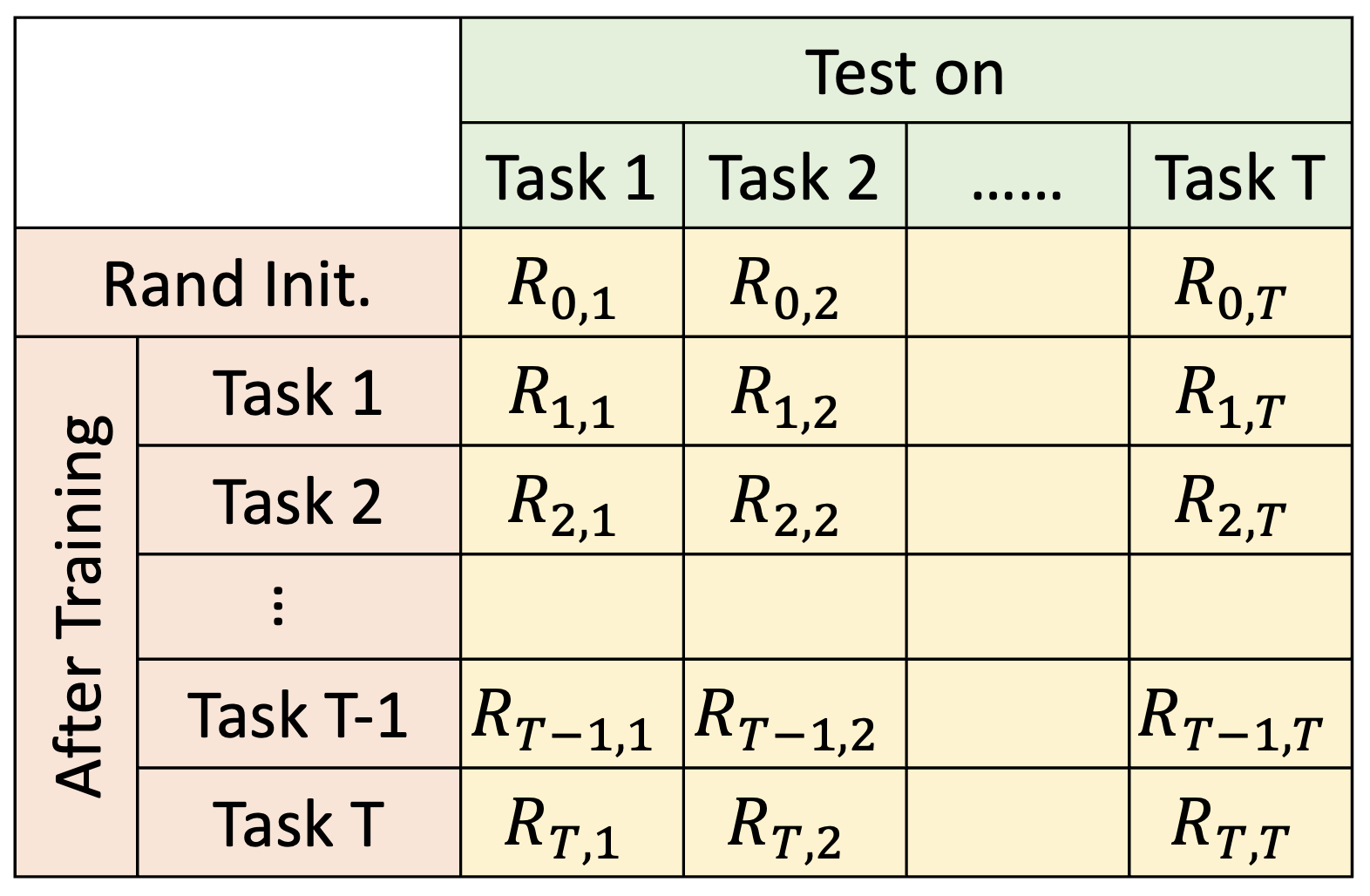
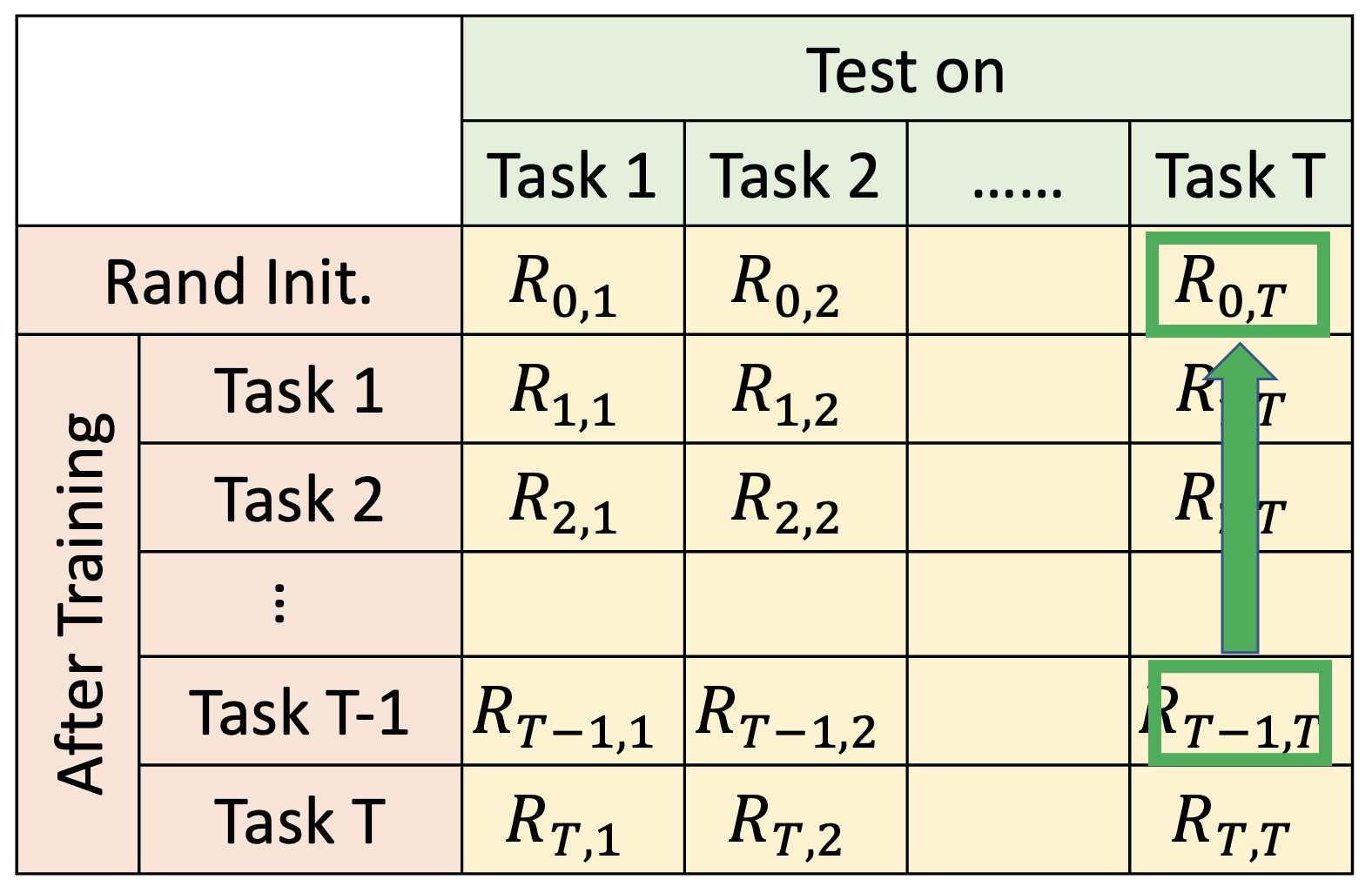
考虑更一般的情况:假如有 \(T\) 个待训练的任务,我们绘制了一个 \((T + 1) \times (T + 1)\) 大小的表格,每个单元格 \(R_{i, j}\) 代表在完成任务 \(i\) 的训练后,模型在任务 \(j\) 上的表现。
- \(i > j\):\(R_{i, j}\) 表明在训练完任务 \(i\) 后模型是否忘了任务 \(j\)
- \(i < j\):\(R_{i, j}\) 表明模型是否能将任务 \(i\) 的训练成果迁移到任务 \(j\) 上
常见的评估方法有:
- 平均值:\(\dfrac{1}{T} \sum\limits_{i=1}^T R_{T, i}\)(仅看表格最后一行)
-
后向迁移(backward transfer):\(\dfrac{1}{T-1} \sum\limits_{i=1}^{T-1} R_{T, i} - R_{i, i}\)
- 显然这个值通常为负(如果读者能找到让这个值为正的技术,那就很 nb 了)
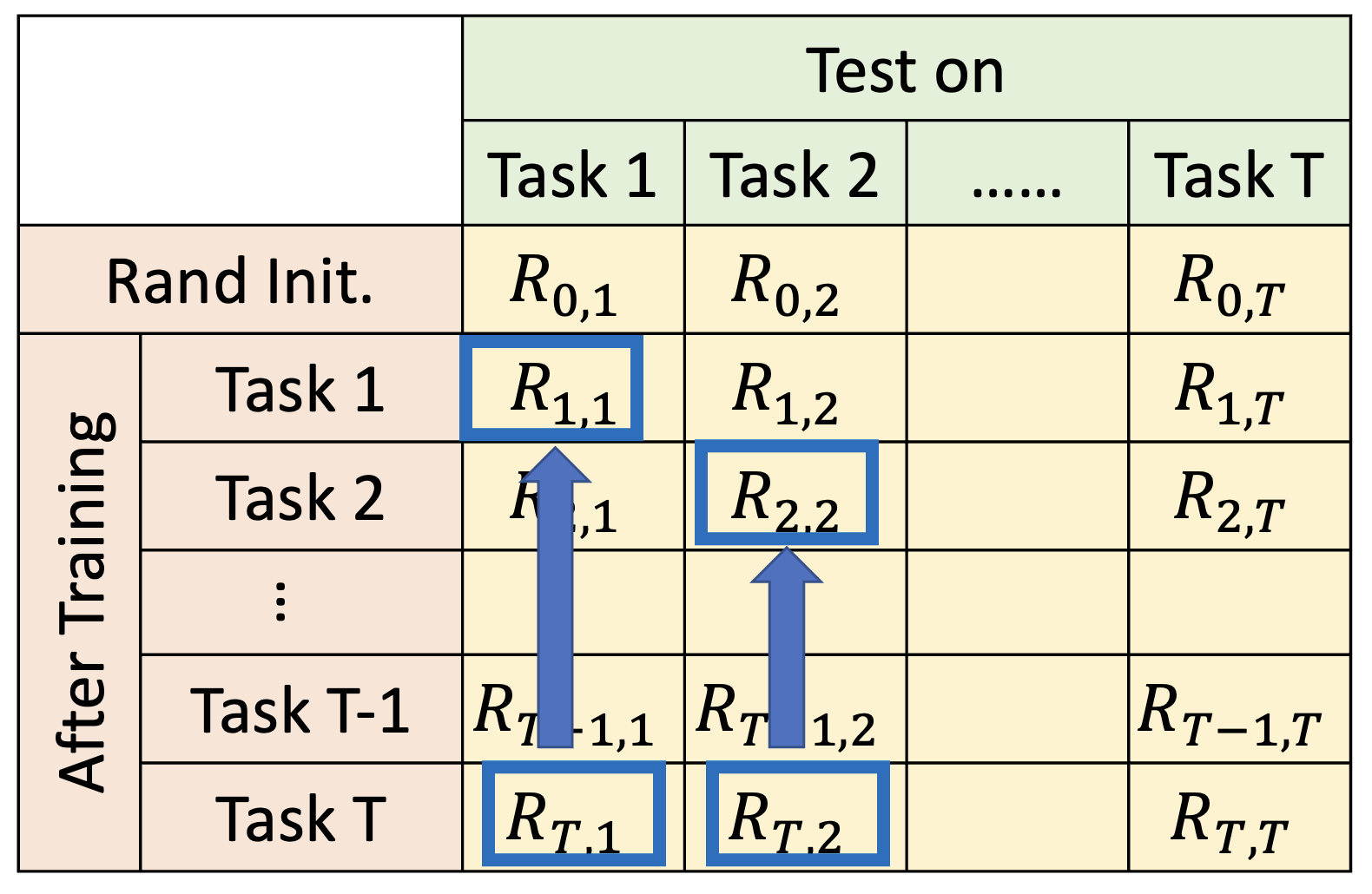
-
前向迁移(forward transfer):\(\dfrac{1}{T-1} \sum\limits_{i=2}^{T} R_{i - 1, i} - R_{0, i}\)
接下来将介绍三个常见的研究方向~
Selective Synaptic Plasticity⚓︎
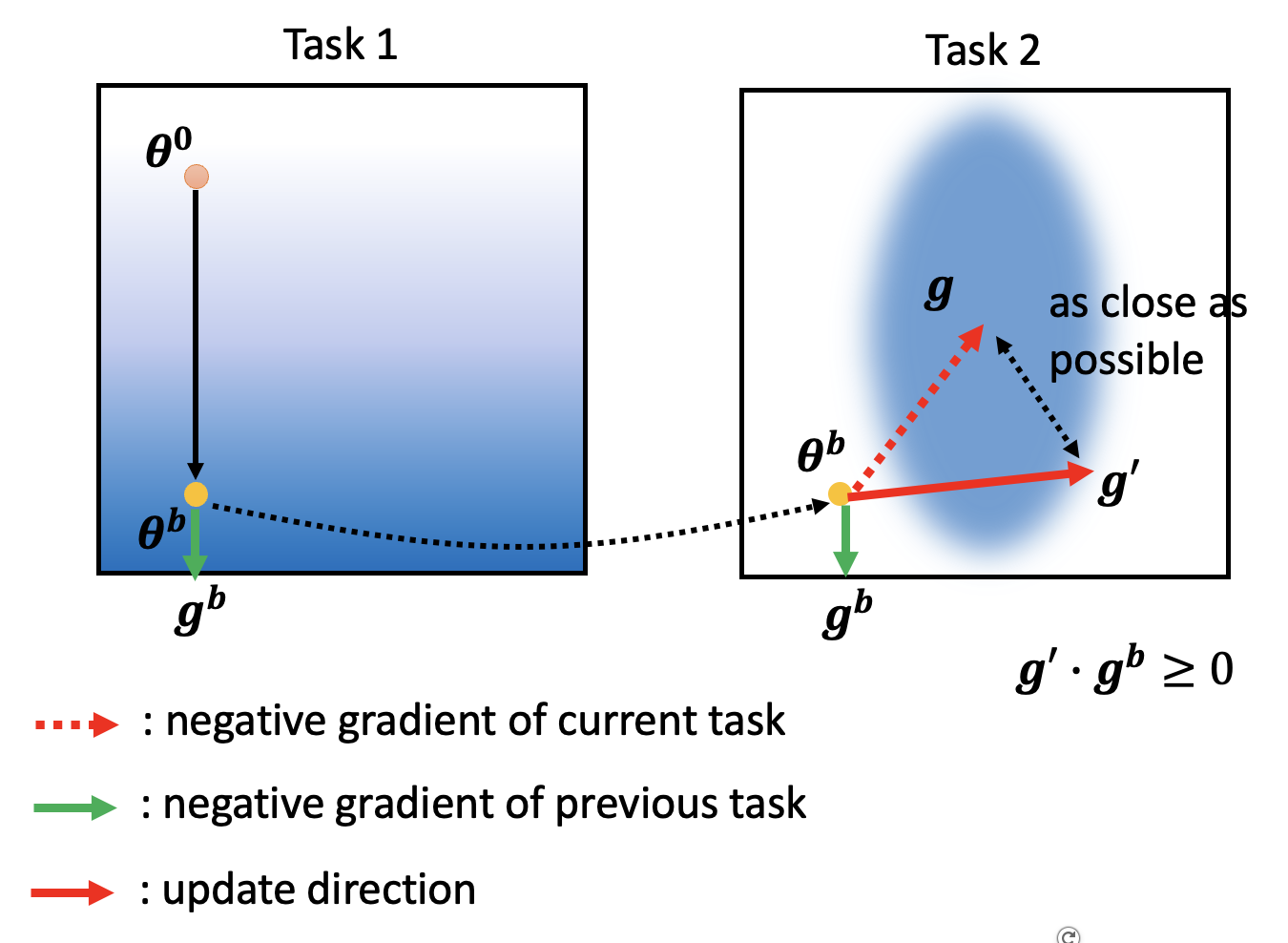
先来看为什么会出现灾难性遗忘的现象。考虑一个很简单的例子:模型只有两个参数 \(\theta_1, \theta_2\)。在任务 1 中,初始参数为 \(\bm{\theta}^0\),训练结束后参数为 \(\bm{\theta}^b\)。接着将在任务 2 上训练该模型(仍然沿用刚训练得到的参数
下图展示了模型在两个任务中的误差曲面,其中颜色越蓝表明损失越小:
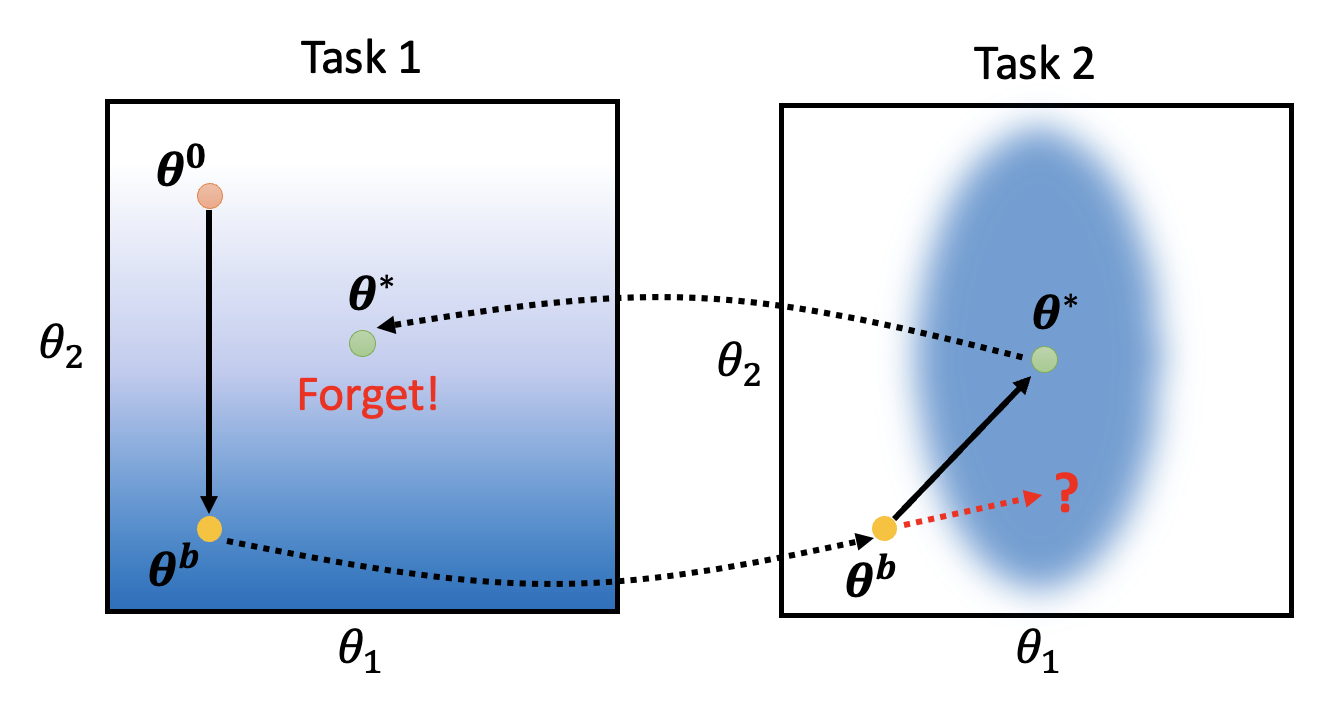
要是模型在任务 2 的训练中能够沿红色虚线箭头前进,那么它就能保证其原来解决任务 1 的能力。
其中一个解决方案叫做选择性突触可塑性(selective synaptic plasticity),它是一种基于正则化的方法 (regularization-based approach)。它的基本思想是:只有部分参数对之前的任务来说是重要的,所以只需改变那些不重要的参数。假设 \(\bm{\theta}^b\) 为模型从先前任务中习得的参数,并且令每个参数 \(\theta^b_i\) 都有一个“守卫” \(b_i\)。那么重新定义损失函数为:
- \(L'(\bm{\theta})\):将要被优化的损失
- \(L(\bm{\theta})\):当前任务的损失
- \(b_i\)
: “守卫”,反映第 \(i\) 个参数的重要程度 - \(\theta_i\):将要学习的参数
- \(\theta_i^b\):从之前任务中习得的参数
- 因而 \(\sum\limits_i b_i (\theta_i - \theta_i^b)^2\) 反映了 \(\bm{\theta}, \bm{\theta}^b\) 之间在某个方向上要有多近
- 灾难性遗忘:若 \(b_i = 0\),\(\theta_i\) 没有任何约束(反正无论多大这项都没有影响)
- 固执(intransigence):若 \(b_i = \infty\),\(\theta_i\) 和 \(\theta_i^b\) 应当始终相等
那么接下来要讨论的问题是如何寻找合适的 \(b_i\)?下面仍然通过前面的例子来讲述大致的思路。假如已经在任务 1 上找到最优参数 \(\bm{\theta}^b\)。从这个点出发,沿 \(\theta_1\) 方向看,损失没有太大的变化,说明这个参数不重要,是可以改变的,因而 \(b_1\) 比较小;但沿 \(\theta_2\) 方向看,损失变化明显,表明它是重要参数,\(b_2\) 应当大一些。
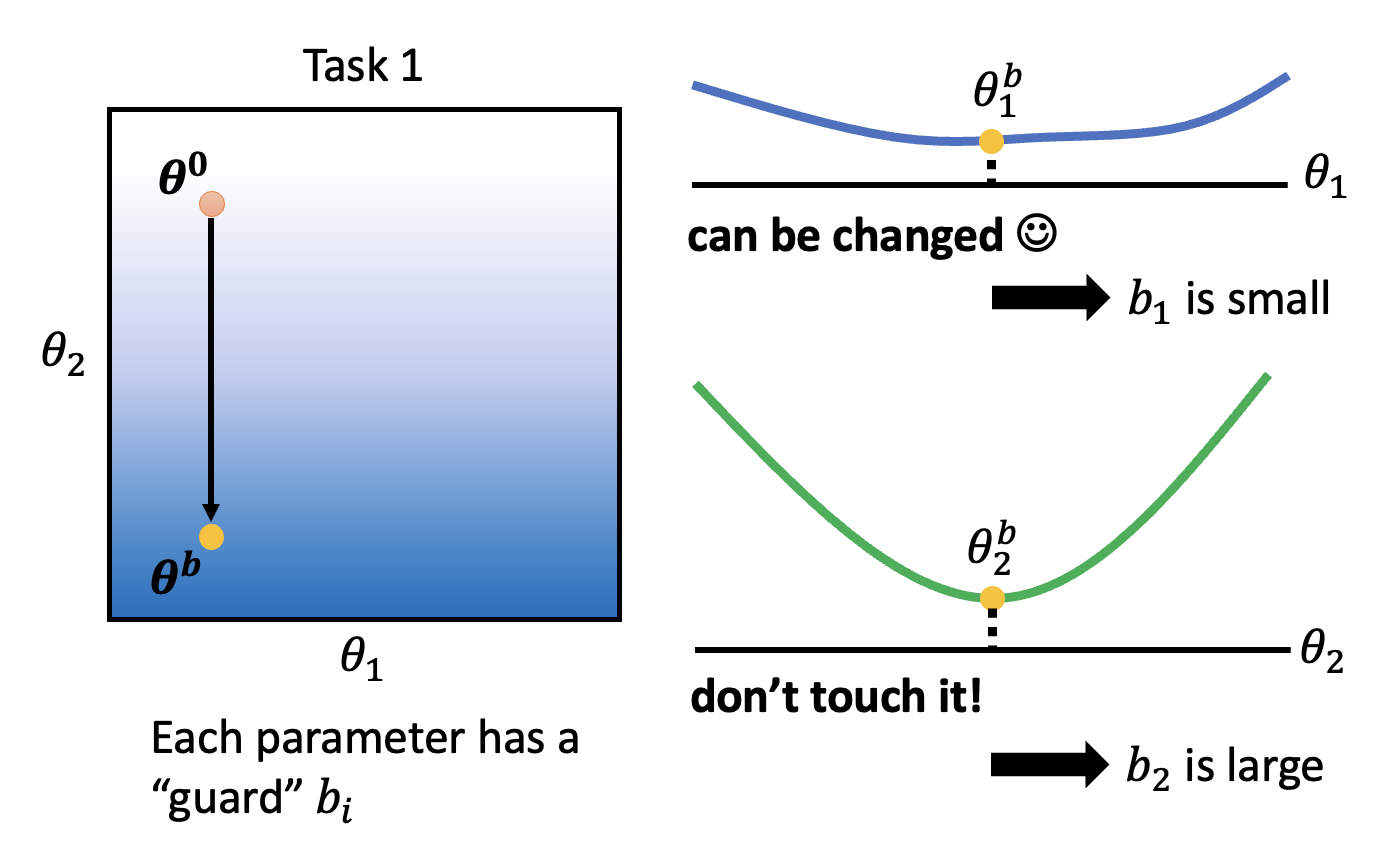
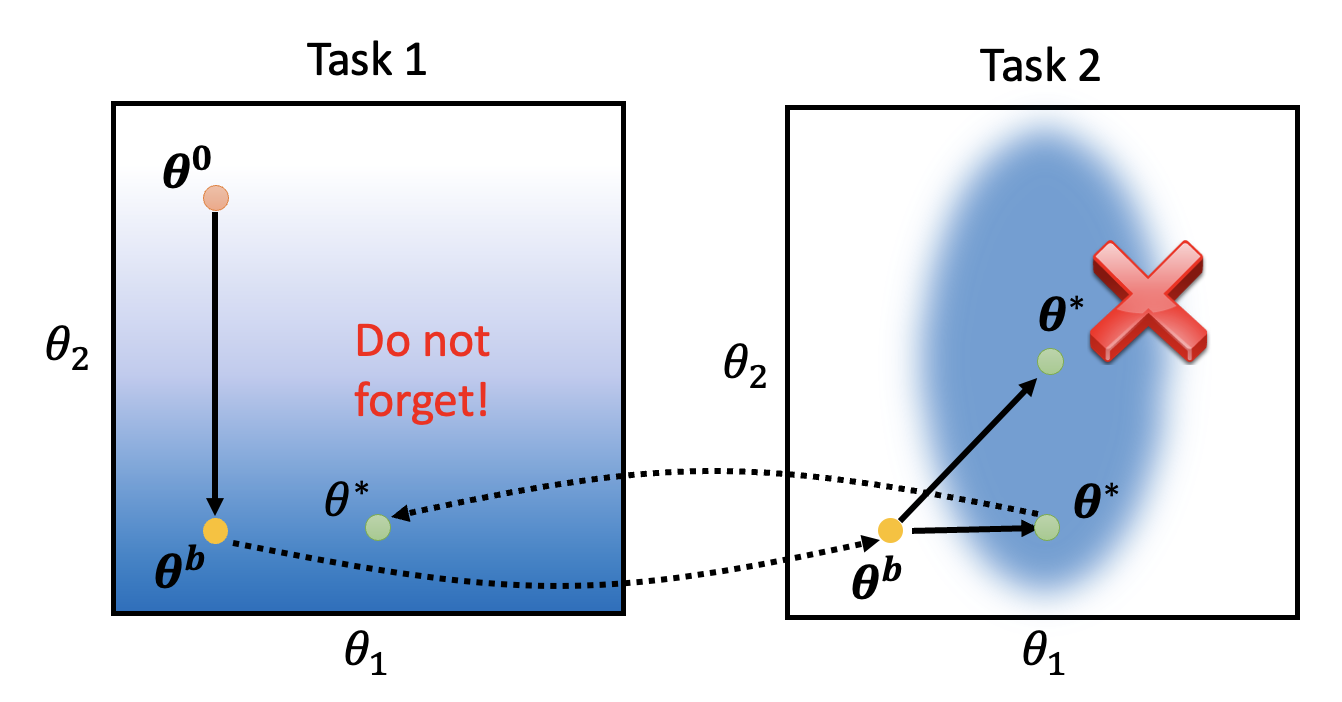
有了上面的发现后,在任务 2 上训练模型的时候就要有意地让模型尽可能沿 \(\theta_1\) 方向变化而不是沿 \(\theta_2\) 方向,这样模型可以兼顾两个任务上的能力。
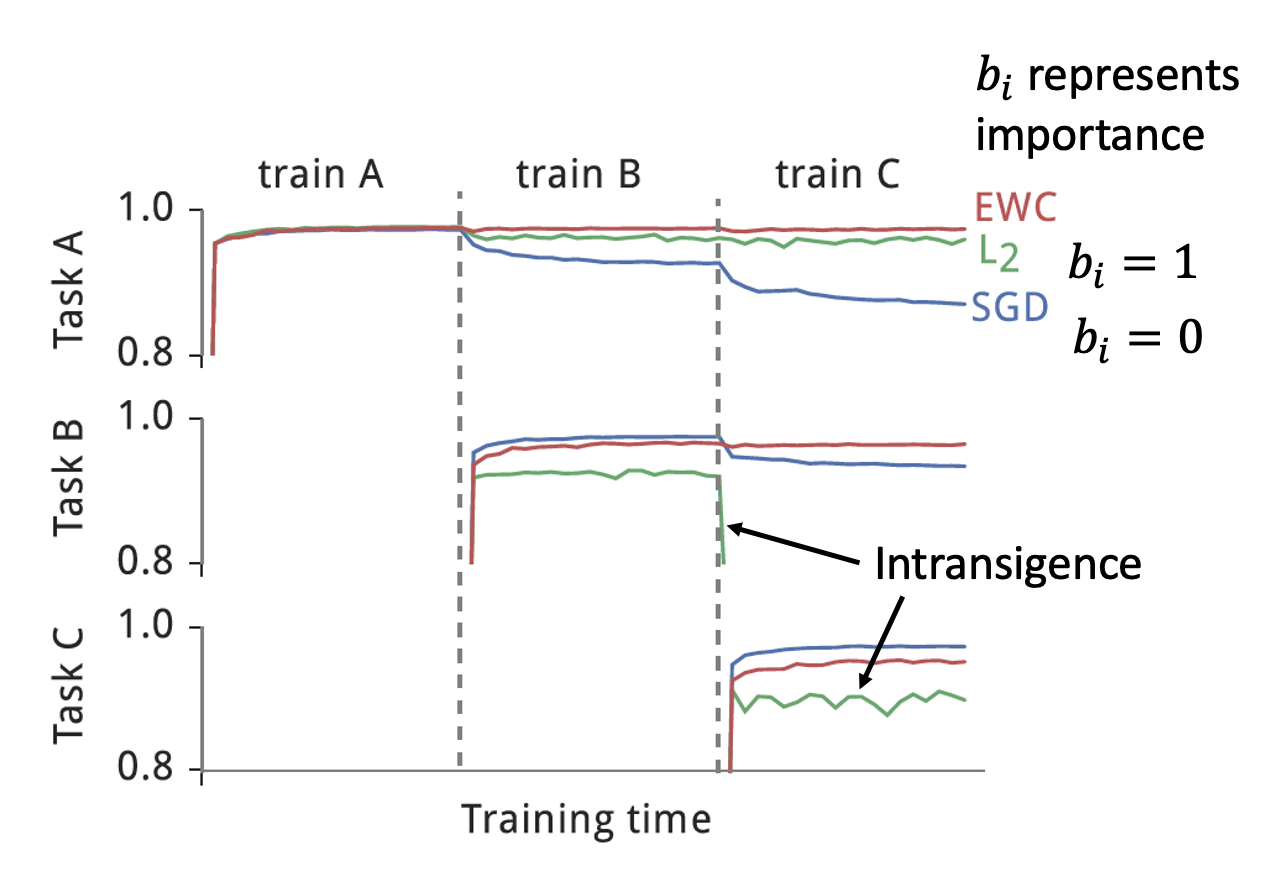
下面来看这种方法的效果。
- 蓝色曲线为 \(b_i = 0\) 的情况(就是一般的梯度下降法)
- 蓝色曲线随训练任务的继续,会逐渐遗忘解决先前任务的能力
- 绿色曲线为 \(b_i = 1\) 的情况
- 可以看到绿色曲线多数情况下处在偏下的准确率,说明它学习新本领的能力不足(有些“固执”)
- 红色曲线就用到了现在这种方法,虽然表现不一定是最好的,但是最稳定
相关研究:
- Elastic Weight Consolidation (EWC)
- 上面的实验结果来自这篇论文
- Synaptic Intelligence (SI)
- Memory Aware Synapses (MAS)
- RWalk
- Sliced Cramer Preservation (SCP)
还有一种基于正则化的方法叫做梯度情景记忆(gradient episodic memory, GEM),它的大致思路是让训练先前任务的梯度影响训练当前任务的梯度。但这种方法的问题在于它需要先前任务的数据,会占据更多空间。不过如果需要的数据量不大,那还是可以接受的。
Additional Neural Resource Allocation⚓︎
第二个方向是尝试改变每个任务中对神经元的资源分配,具体有以下可行的做法:
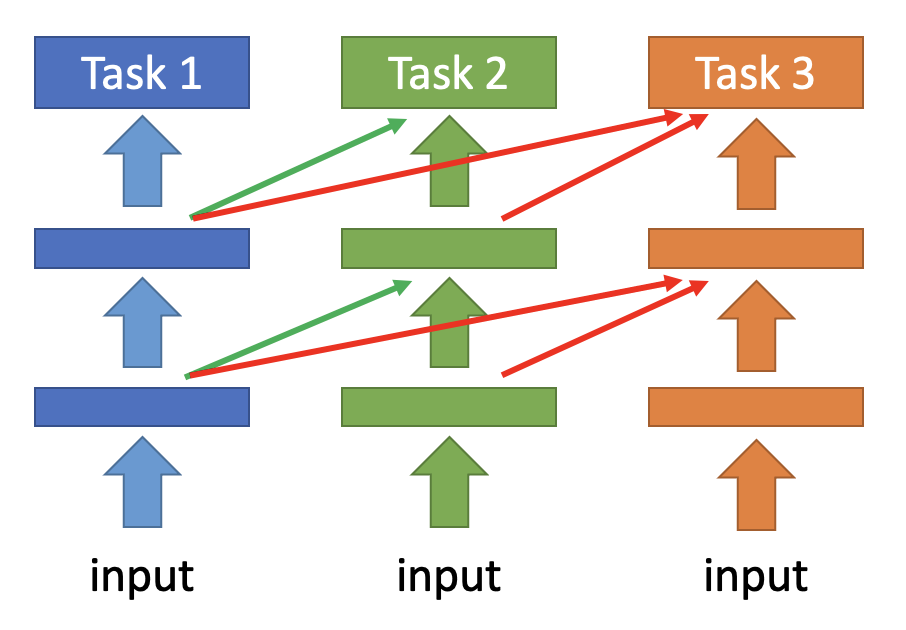
-
渐进神经网络 (progressive neural network):每多训练一个任务,就往原来的模型中增添更多的参数,并保留先前任务中训练得到的参数
-
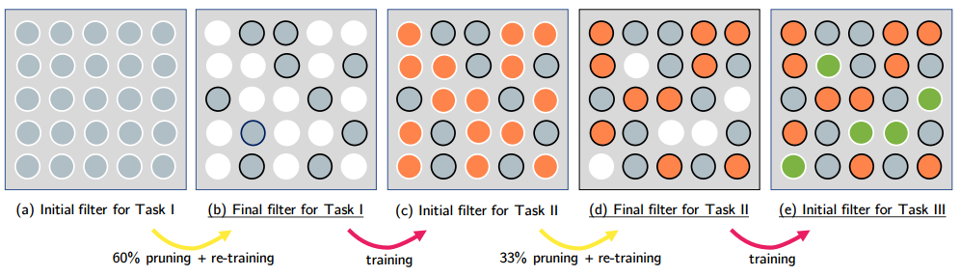
-
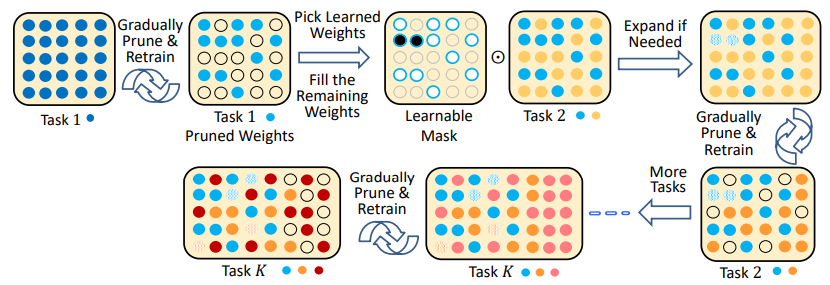
Compacting, Picking, and Growing (CPG)
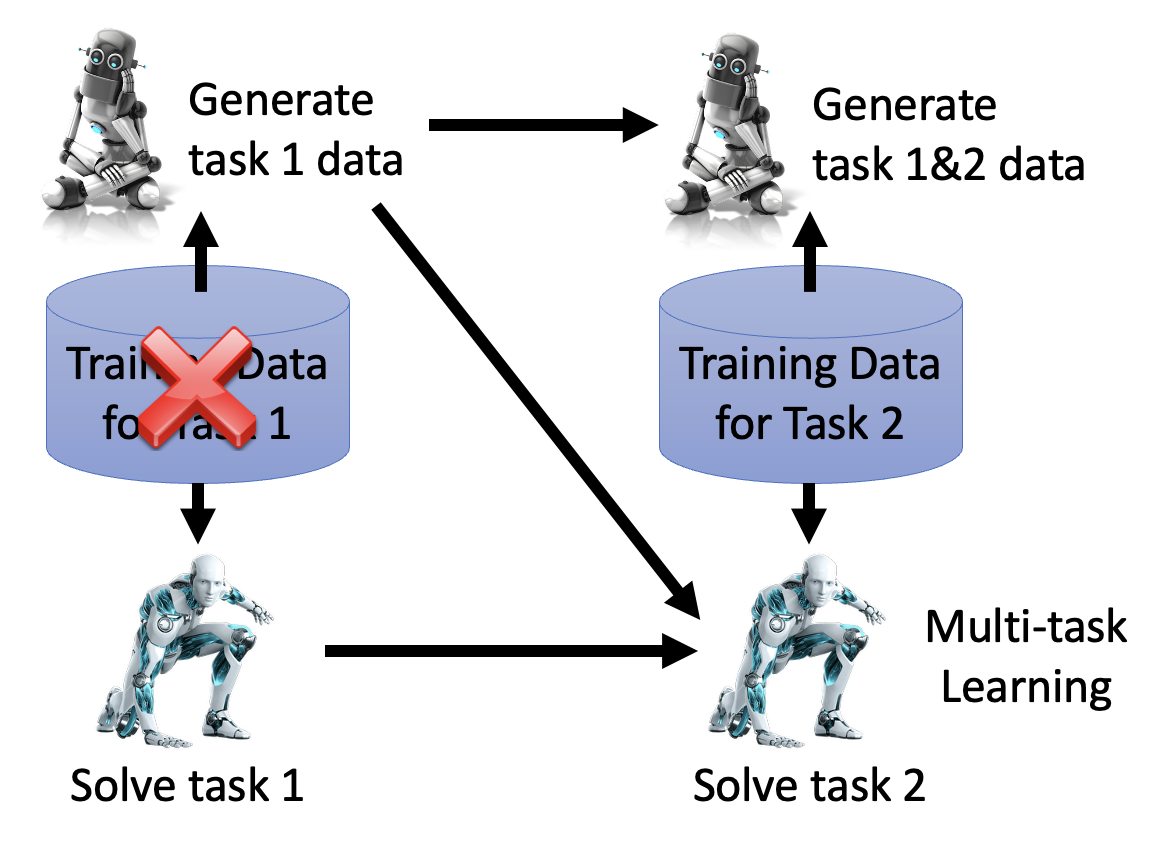
Memory Replay⚓︎
前面讲过,要是能集中所有任务的数据,那模型就不会出现灾难性遗忘的现象,但又规定不能保留先前任务的数据。我们可以从这个看似自相矛盾的要求中寻求一个平衡:额外训练一个生成模型(注意它也会占据一定空间
相关研究链接:
- https://arxiv.org/abs/1705.08690
- https://arxiv.org/abs/1711.10563
- https://arxiv.org/abs/1909.03329
Others⚓︎
前面介绍的模型过于简化,其中一个忽略的点是每个任务要求的分类数量可能是不同的(而我们默认是一样的
本讲只介绍了最简单的一类情况,其实还有两类更有挑战性的情况,感兴趣的读者可阅读论文 Three scenarios for continual learning。
也许读者已经注意到,任务的顺序对终身学习而言也是有不小影响的,有时可能因为任务顺序的改变,模型准确率就能有一些提升。
有关这一主题的研究叫做课程学习(curriculum learning)(什么鬼名字?
评论区