Machine Learning - P2⚓︎
约 11193 个字 预计阅读时间 56 分钟
More Insight into Optimization⚓︎
Backpropogation⚓︎
在机器学习中,未知参数 \(\theta = \{w_1, w_2, \dots, b_1, b_2, \dots\}\) 通常会包含很多项。在使用梯度下降法时,每次都要对里面的每一项求偏微分;而且如果训练多次的话,计算量就会变得相当地大,因而效率就很低了。为了提高计算的效率,我们引入了一种新的计算技巧:反向传播(backpropogation)。
数学基础:偏微分的链式法则
-
情况 1:若 \(y = g(x), z = h(y)\)
\[ \dfrac{dz}{dx} = \dfrac{dz}{dy} \dfrac{dy}{dx} \] -
情况 2:若 \(x = g(s), y = h(s), z = k(x, y)\)
\[ \dfrac{dz}{ds} = \dfrac{\partial z}{\partial x} \dfrac{\partial x}{\partial s} + \dfrac{\partial z}{\partial y} \dfrac{\partial y}{\partial s} \]
记第 \(n\) 项数据 \(x^n\) 在神经网络中,训练得到的预测值 \(y^n\) 与实际值 \(\hat{y}^n\) 之差为 \(C^n\),并且记损失 \(L(\theta) = \sum\limits_{n=1}^n C^n(\theta)\)(\(N\) 项数据的误差和
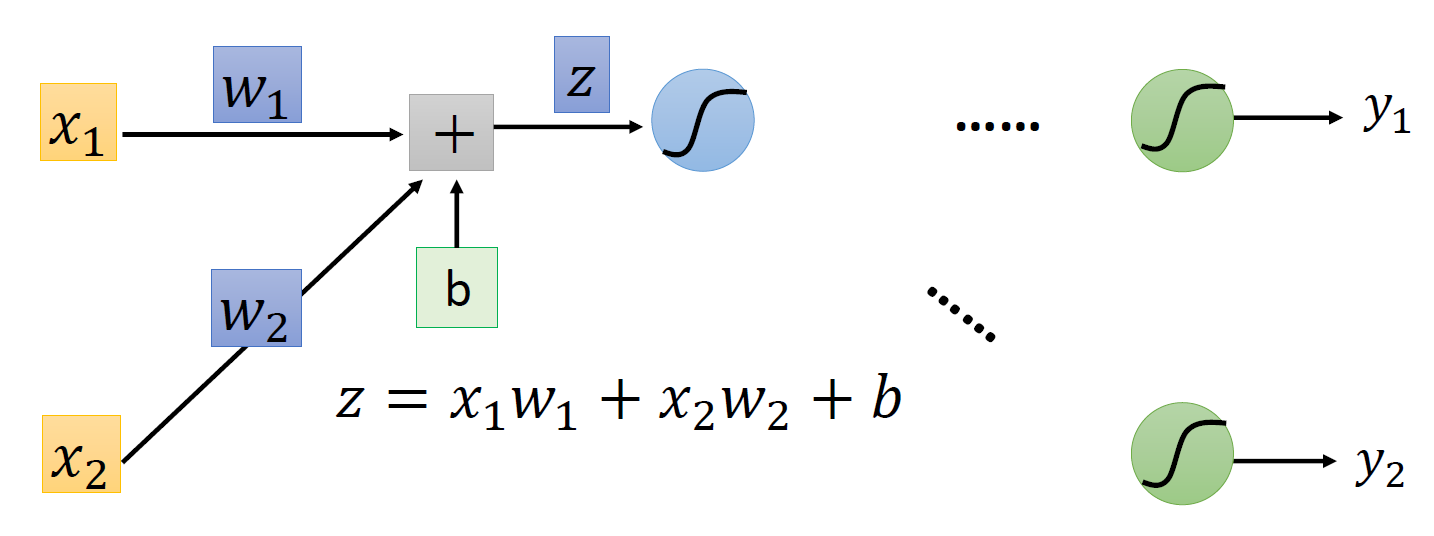
现在考虑如何计算 \(\dfrac{\partial C}{\partial w}\)——根据链式法则,我们可以将其转化为 \(\dfrac{\partial z}{\partial w} \dfrac{\partial C}{\partial z}\)。其中这个 \(z\) 是通过数据输入、权重和偏移计算得到的,如下图所示(简化版本
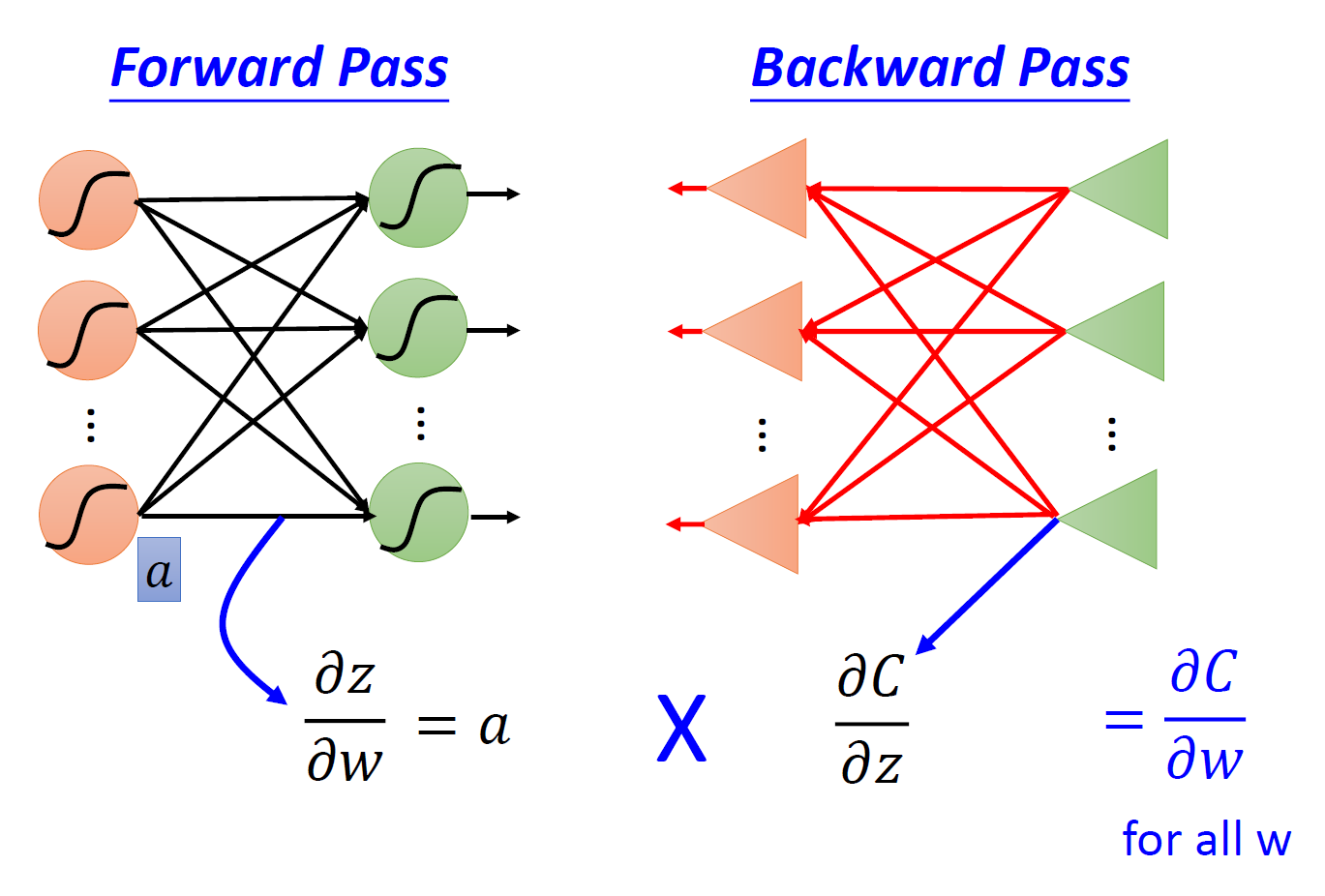
现在计算就被分为两部分了,这两部分同时也是反向传播的组成部分:
- 前递(forward pass):对所有的参数,计算 \(\dfrac{\partial z}{\partial w}\)
- 后递(backward pass):对所有的激活函数输入值 \(z\),计算 \(\dfrac{\partial C}{\partial z}\)
其中前递的计算相当简单:\(\dfrac{\partial z}{\partial w}\) 的值就是与权重相关联的输入数据,因此在训练的过程中,我们顺手就可以将这些值个计算出来。拿上图的例子来说,\(\dfrac{\partial z}{\partial w_1} = x_1, \dfrac{\partial z}{\partial w_2} = x_2\)。
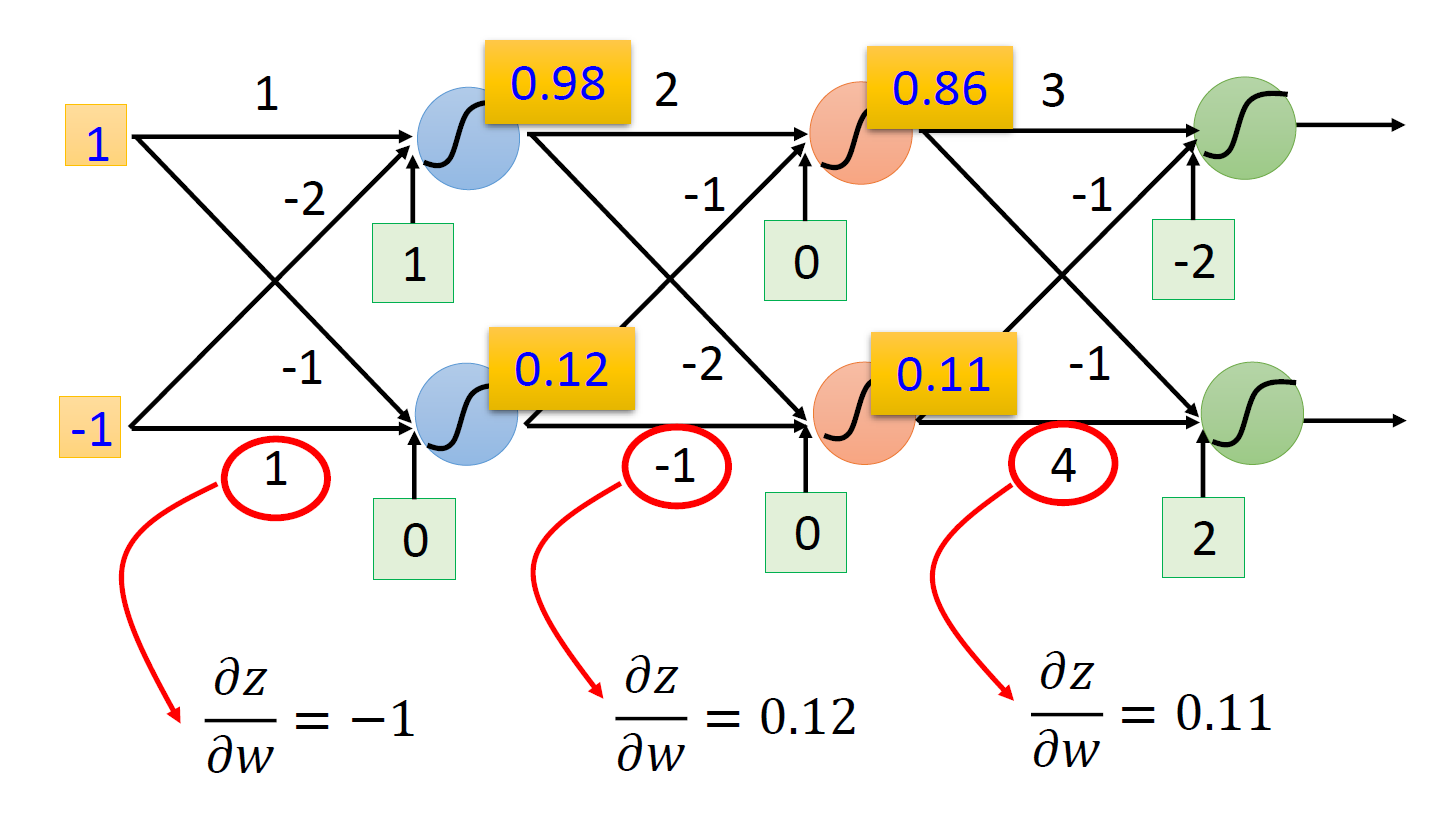
例子
对于更多次的训练,道理也是一样简单。
难点在于计算后递,乍看上去好像无从下手。事实上,后递的计算又一次用到了链式法则:\(\dfrac{\partial C}{\partial z} = \dfrac{\partial a}{\partial z} \dfrac{\partial C}{\partial a}\),其中 \(a = \sigma(z)\)(sigmoid 函数
-
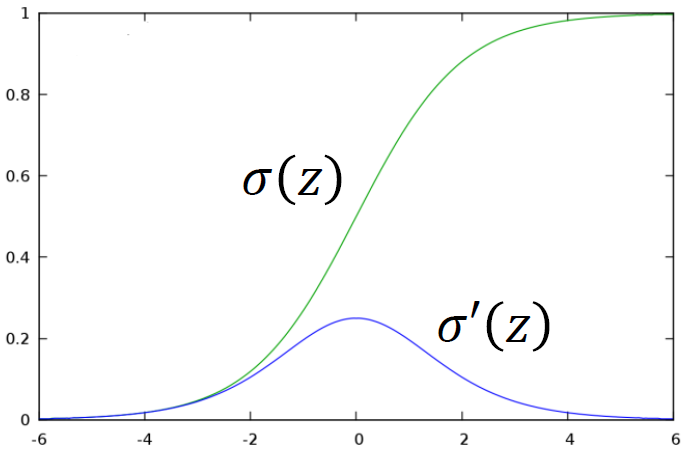
\(\dfrac{\partial a}{\partial z} = \sigma'(z)\),因为我们知道 \(z\) 的值(前面的计算中已经算过了
) ,所以 \(\sigma'(z)\) 就是一个常量sigmoid 函数及其导函数的图像
-
\(\dfrac{\partial C}{\partial a}\):又又一次用到链式法则,借助下图来理解这个过程:
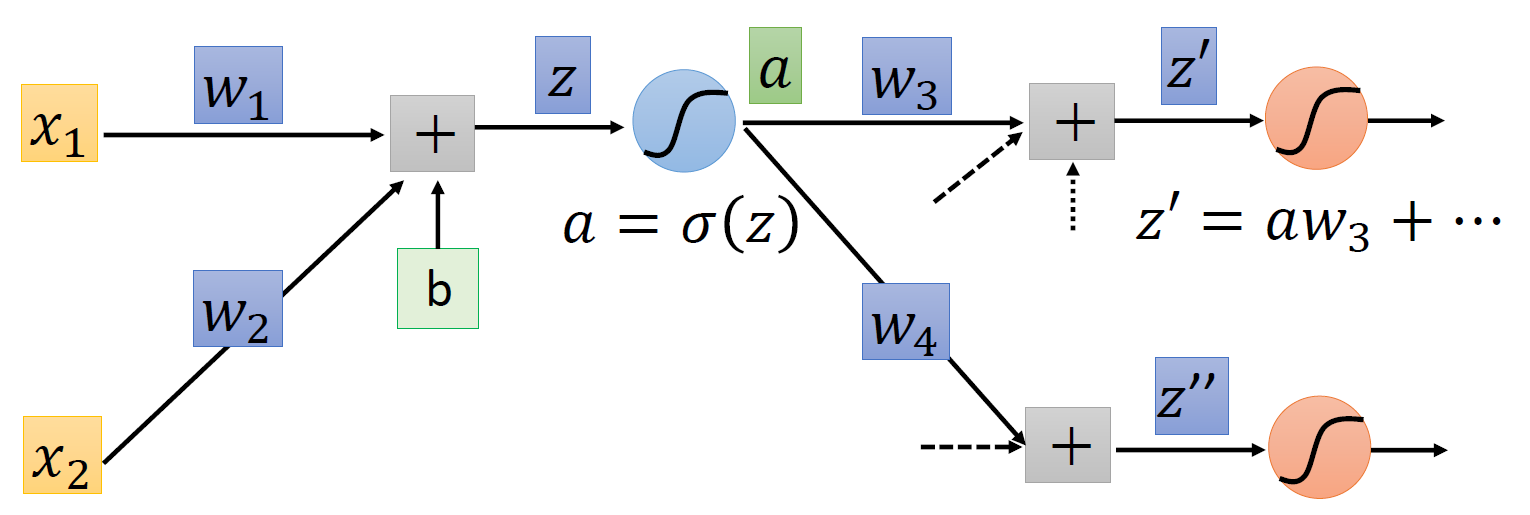
可以看到,\(a\) 的值会影响到 \(z', z''\),因此 \(\dfrac{\partial C}{\partial a} = \dfrac{\partial z'}{\partial a} \dfrac{\partial C}{\partial z'} + \dfrac{\partial z''}{\partial a} \dfrac{\partial C}{\partial z''}\)。其中 \(\dfrac{\partial z'}{\partial a}, \dfrac{\partial z''}{\partial a}\) 的值很容易计算,就是对应的权重 \(w_3, w_4\),而 \(\dfrac{\partial C}{\partial z'}, \dfrac{\partial C}{\partial z''}\) 的值我们先暂时假设它们是已知量
总结一下:\(\dfrac{\partial C}{\partial z} = \sigma'(z) \Big[w_3 \dfrac{\partial C}{\partial z'} + w_4 \dfrac{\partial C}{\partial z''}\Big]\)。最后有待求解的就是刚才假设已知的那两个偏导数,这里我们分为两种情况讨论:
-
如果它们位于最后一次的训练过程中(即在输出层中
) ,那么: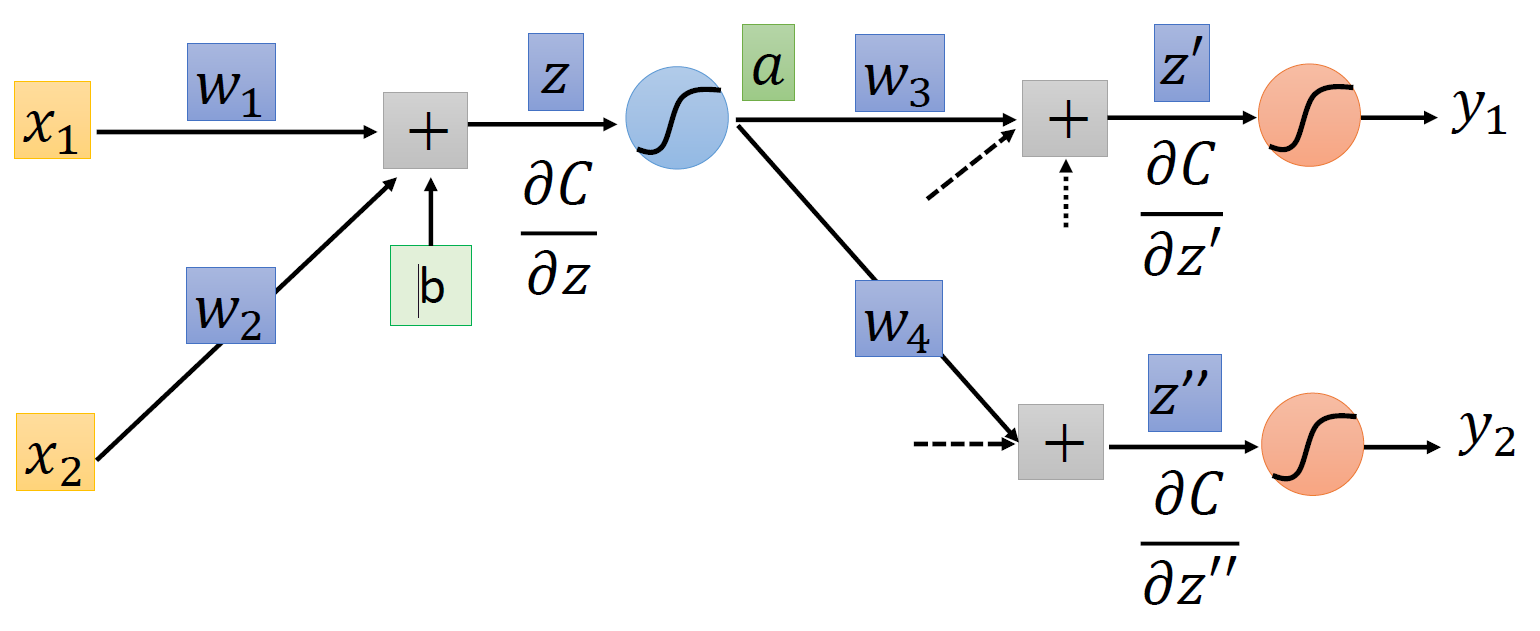 \[ \dfrac{\partial C}{\partial z'} = \dfrac{\partial y_1}{\partial z'} \dfrac{\partial C}{\partial y_1} \quad \dfrac{\partial C}{\partial z''} = \dfrac{\partial y_2}{\partial z''} \dfrac{\partial C}{\partial y_2} \]
\[ \dfrac{\partial C}{\partial z'} = \dfrac{\partial y_1}{\partial z'} \dfrac{\partial C}{\partial y_1} \quad \dfrac{\partial C}{\partial z''} = \dfrac{\partial y_2}{\partial z''} \dfrac{\partial C}{\partial y_2} \]这些量都是相当好计算的,所以结果自然就求出来了
-
如果是在中间的训练过程中,那计算思路如下图所示:
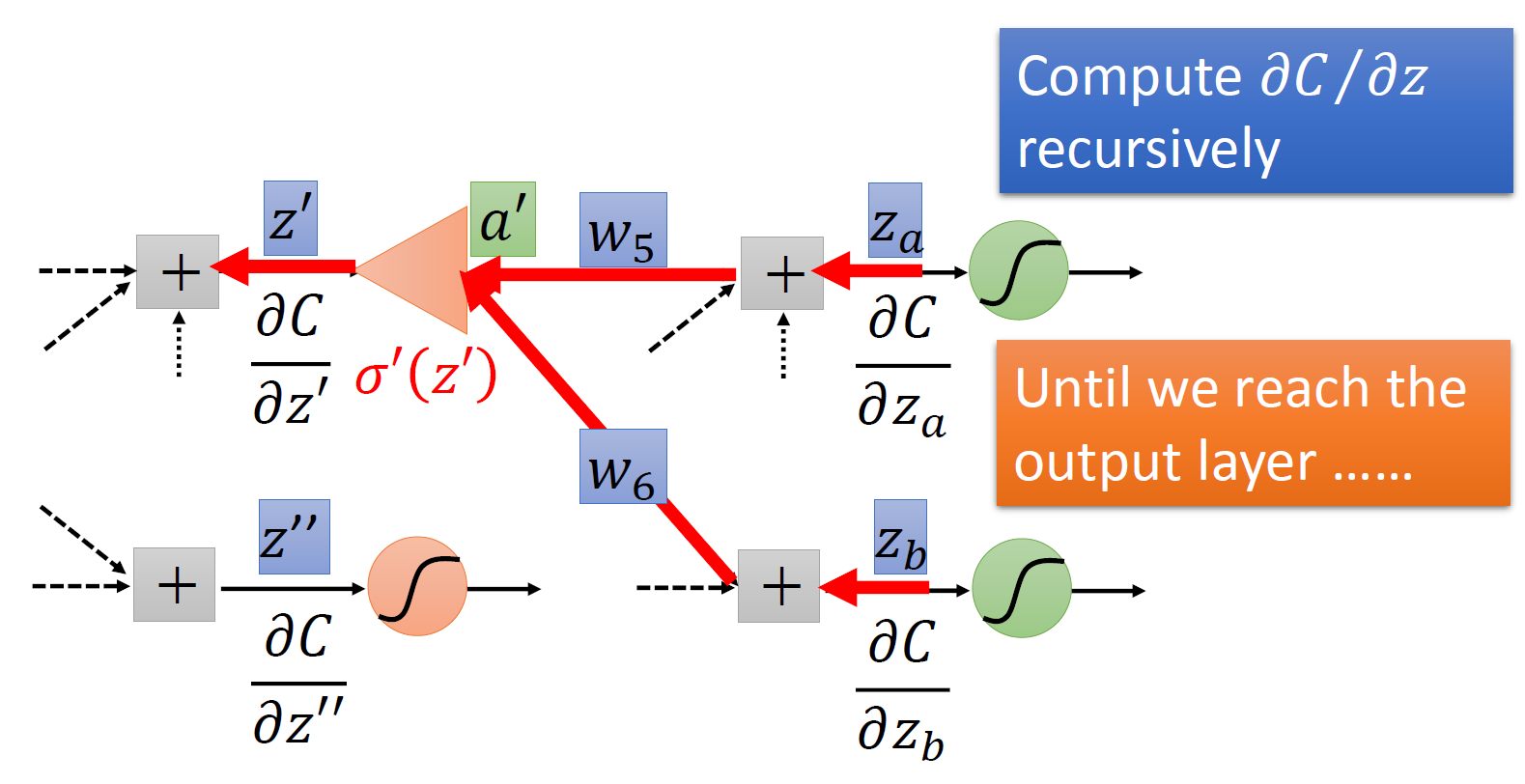
以 \(z'\) 为例稍作解释:要求 \(\dfrac{\partial C}{\partial z'}\),可以像求 \(\dfrac{\partial C}{\partial z}\) 那样继续借助后面的计算值 \(z_a, z_b\) 求解,连计算思路都是一样的。如此往复计算,直到计算到达输出层(即第一种情况时
) ,我们可以依次往前计算前面所有的这些偏导数了!
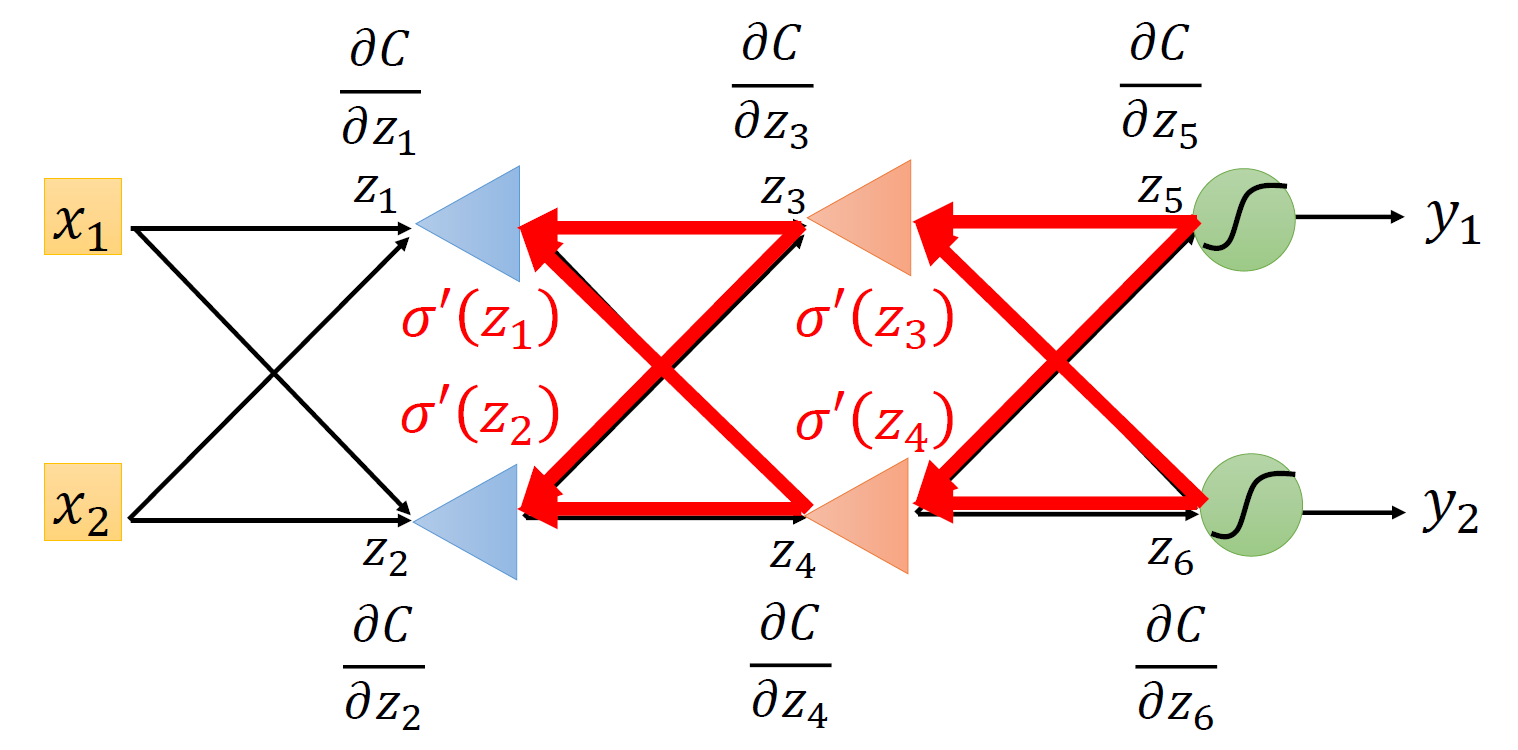
事实上,在计算形如 \(\dfrac{\partial C}{\partial z}\) 这类偏导数时,我们可以直接通过输出值 \(y_1, y_2, \dots\) 按反方向计算,这也就是该算法名称的由来。
总结
Critical Points⚓︎
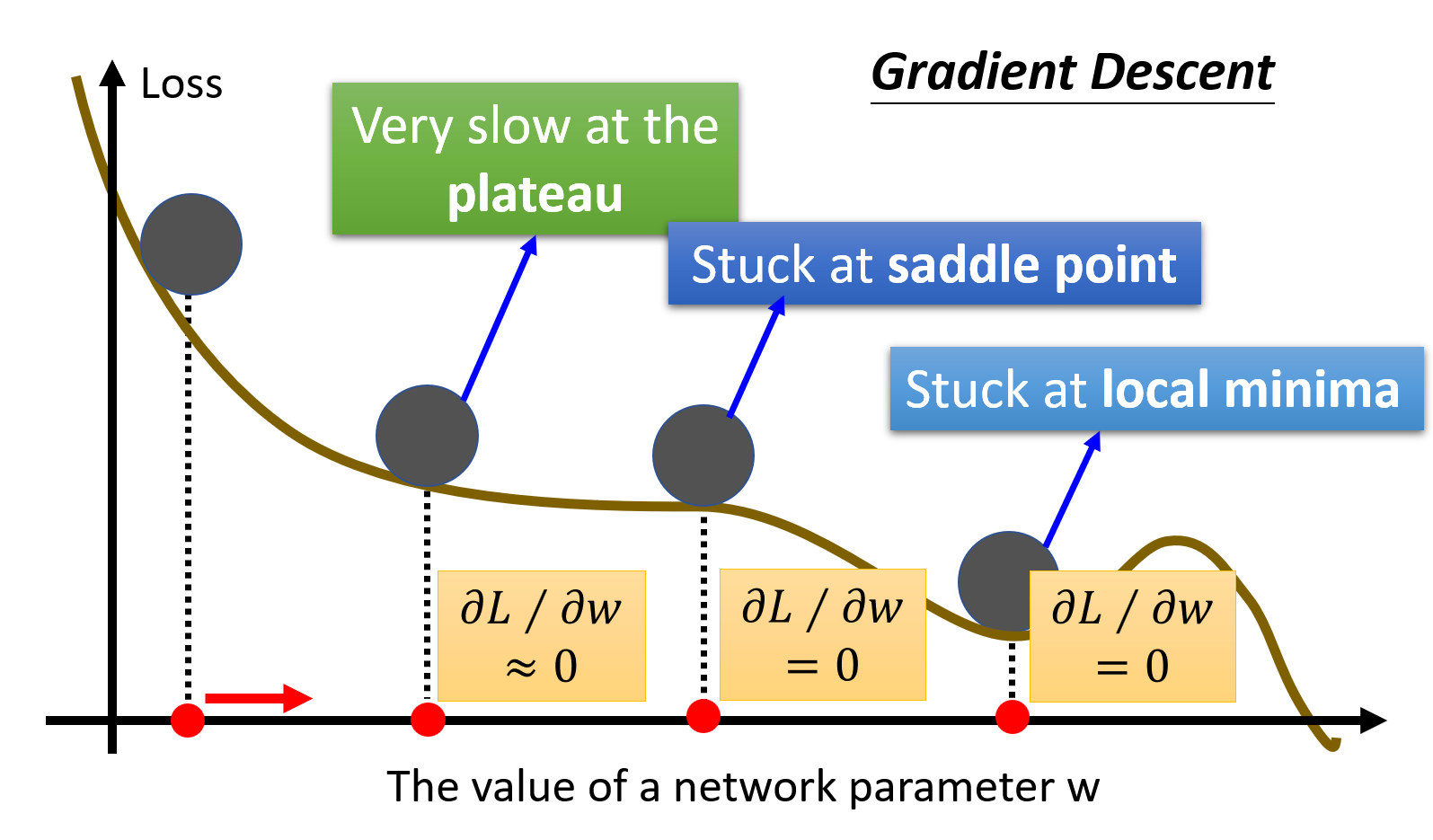
在训练模型的时候,我们可能会遇到模型的损失无法进一步减小,也就是无法继续优化的情况。以梯度下降法为例,当梯度接近 0的时候就会出现这种情况,如下图所示:
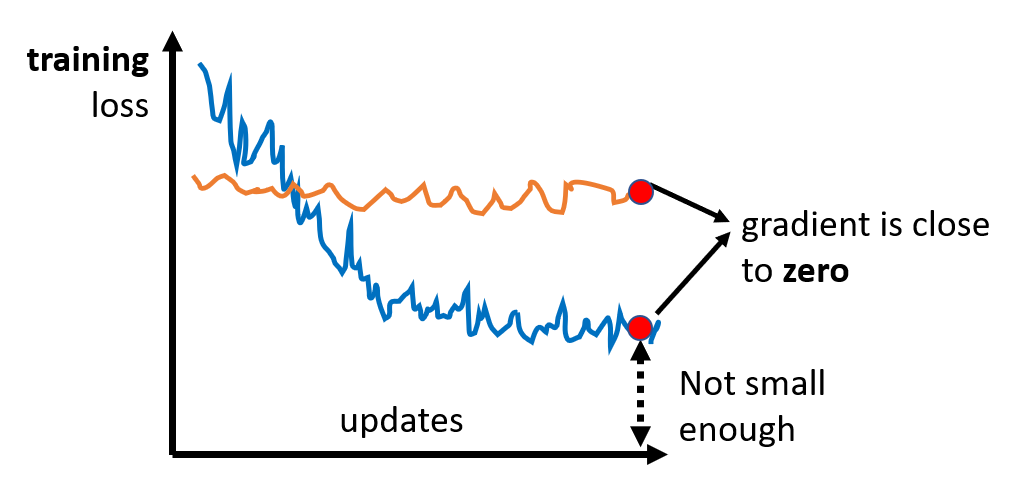
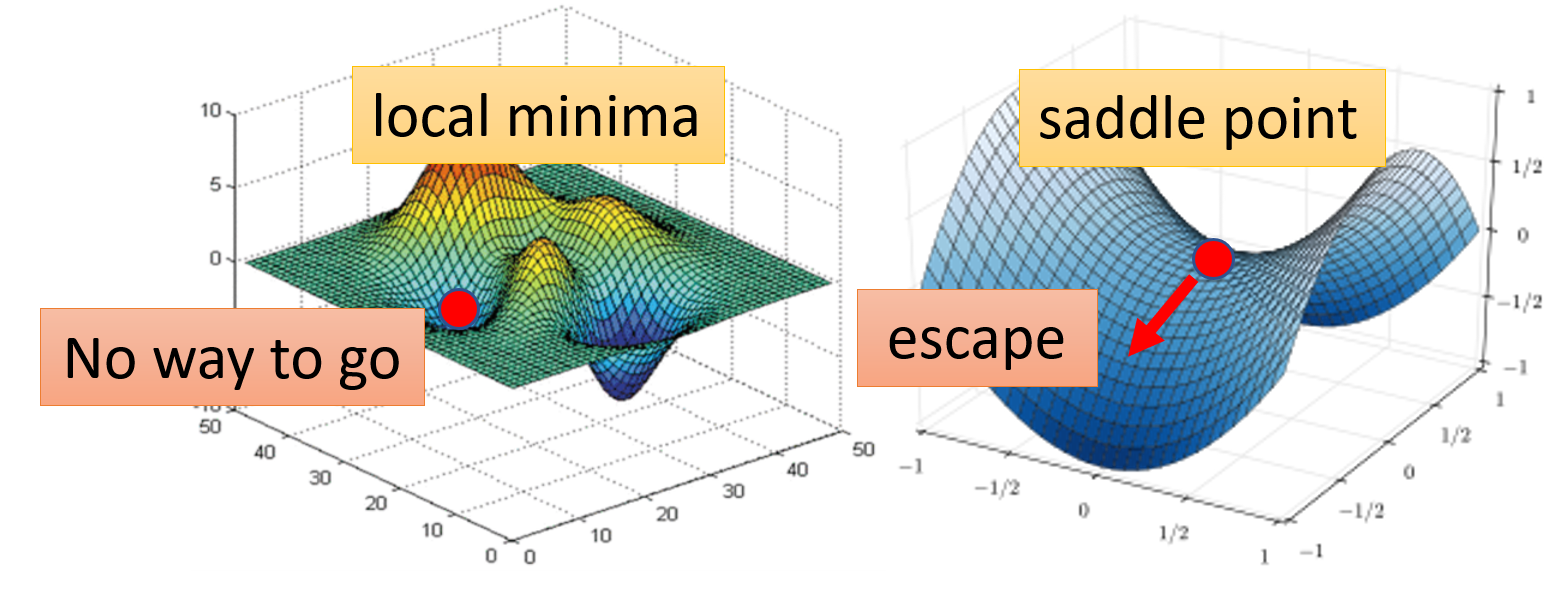
当梯度为 0 时,除了前面介绍过的局部最小(local minima) 的情况,还有一种情况是位于鞍点(saddle point):在某些方向上它是局部最小值,但是在另外的方向上它是局部最大值,因而可以逃脱局部最小值的困境。从形状看像一个马鞍,因而得名。我们将这两种情况统称为关键点(critical point)。
那么现在的问题是:已知梯度为 0,我们该如何区分这属于哪一类关键点呢?这里就要用到一些微积分和线性代数的知识了。
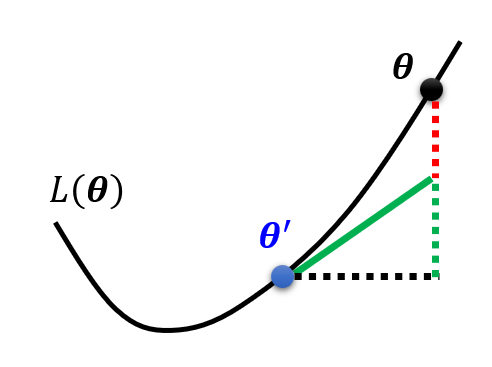
首先要利用泰勒级数(Taylor Series) 进行近似表示。假设某个参数下的损失为 \(L(\bm{\theta})\),并且已知 \(\bm{\theta}'\) 附近很小的一个范围内的有一个 \(\bm{\theta}\),那么 \(L(\bm{\theta})\) 可以被表示为:
其中:
- 梯度 \(\bm{g} = \nabla L(\bm{\theta}')\) 是一个向量,向量内元素 \(\bm{g}_i = \dfrac{\partial L(\bm{\theta}')}{\partial \bm{\theta}_i}\)
- 黑塞矩阵(Hessian matrix) \(H\) 的元素为 \(H_{ij} = \dfrac{\partial^2}{\partial \bm{\theta}_i \partial \bm{\theta}_j} L(\bm{\theta}')\)
如果遇到关键点的话,\(\bm{g} = 0\),那么中间项就可以消掉,只剩下:
我们正是通过最后一项来判断关键点的类型。为了便于后续讲述,先令 \(\bm{v}^T H \bm{v} = (\bm{\theta} - \bm{\theta}')^T H (\bm{\theta} - \bm{\theta}')\)。对于所有的 \(\bm{v}\),如果:
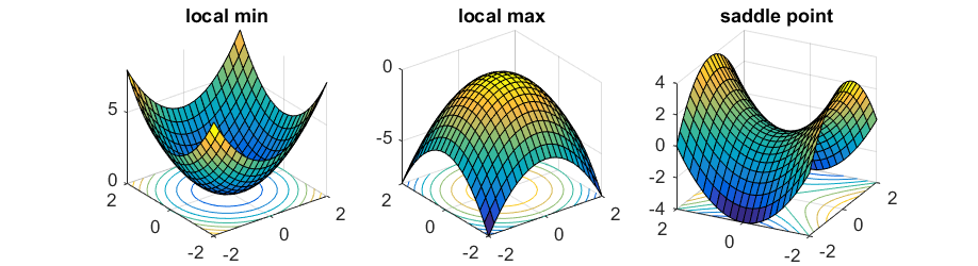
- \(\bm{v}^T H \bm{v} > 0\),那么对于在 \(\bm{\theta}'\) 附近的 \(\bm{\theta}\),满足 \(L(\bm{\theta}) > L(\bm{\theta}')\),因此这是一个局部最小点
- 等价表述:当 \(H\) 为正定(positive definite) 矩阵,即所有特征值 (eigen values) 均为正数时,表明到达了局部最小点
- \(\bm{v}^T H \bm{v} < 0\),那么对于在 \(\bm{\theta}'\) 附近的 \(\bm{\theta}\),满足 \(L(\bm{\theta}) < L(\bm{\theta}')\),因此这是一个局部最大点
- 等价表述:当 \(H\) 为负定(negative definite) 矩阵,即所有特征值均为负数时,表明到达了局部最大点
- 有时 \(\bm{v}^T H \bm{v} > 0\),而有时 \(\bm{v}^T H \bm{v} < 0\),那么这是一个鞍点
- 等价表述:当 \(H\) 的特征值有正有负时,表明到达了鞍点
例子
假设有一个很烂的模型 \(y = w_1 w_2 x\),且已知训练数据 \((x, \hat{y}) = (1, 1)\)(仅 1 组
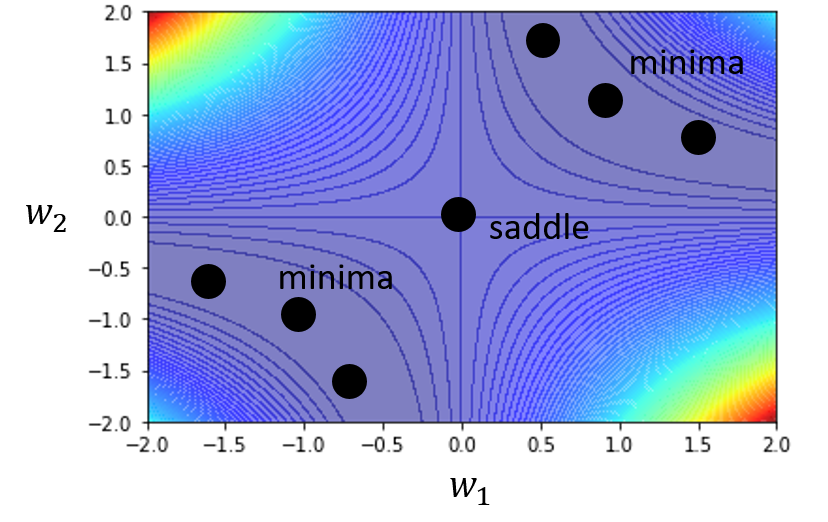
用 MSE 计算损失为:\(L = (\hat{y} - w_1 w_2 x)^2 = (1 - w_1 w_2)^2\)。然后计算每个参数关于损失的一阶和二阶微分,分别作为梯度和黑塞矩阵的元素:
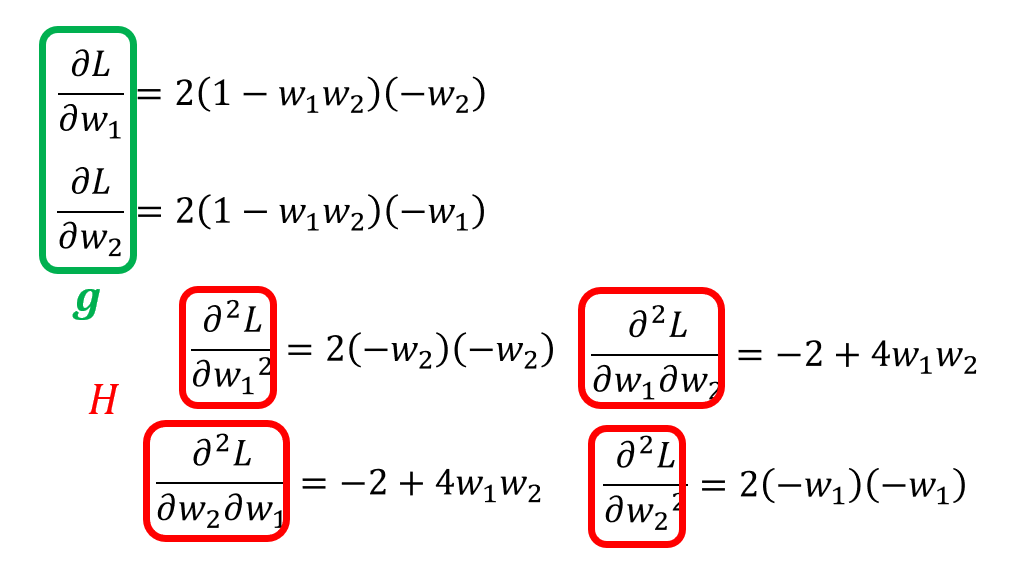
当 \(w_1 = w_2 = 0\) 时,发现梯度为 0,那么该点就是关键点。而且此时黑塞矩阵 \(H = \begin{bmatrix} 0 & -2 \\ -2 & 0\end{bmatrix}\),特征值 \(\lambda_1 = 2, \lambda_2 = -2\),因此可以判定该点为鞍点。
对于鞍点而言,黑塞矩阵除了能够用于判断外,还能为我们指示离开鞍点,即更新参数的方向。现在假设 \(\bm{u}\) 是 \(H\) 的一个特征向量,\(\lambda\) 是 \(u\) 的特征值,那么:
因此,如果 \(\lambda < 0\) 的话,那么 \(\bm{u}^T H \bm{u} < 0\)。回到前面关于损失的泰勒展开式 \(L(\bm{\theta}) = L(\bm{\theta}') + \dfrac{1}{2} (\bm{\theta} - \bm{\theta}')^T H (\bm{\theta} - \bm{\theta}')\),令 \(\bm{u} = \bm{\theta} - \bm{\theta}'\),那么 \(\bm{\theta} = \bm{\theta}' + \bm{u}\)。由于此时 \(L(\bm{\theta}) < L(\bm{\theta}')\),即 \(\bm{\theta}'\) 位于局部最大点,那么从该点沿 \(\bm{u}\) 的方向走的话,损失就会变小,从而离开局部最大点。总之,通过黑塞矩阵的特征向量,我们总能设法离开鞍点。
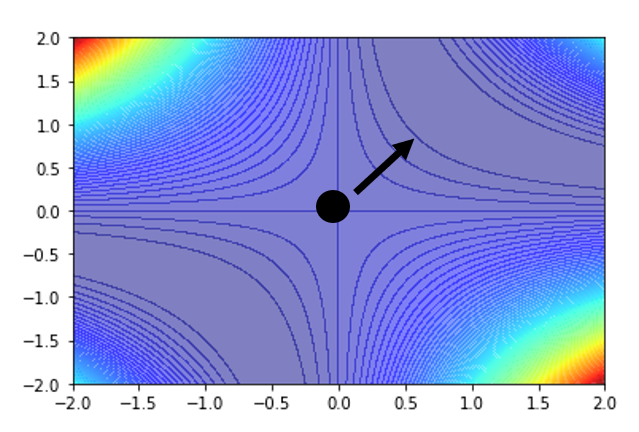
例子
接着前面的例子,第二个特征值为 \(\lambda_2 = -2\),对应特征向量 \(\bm{u} = \begin{bmatrix}1 \\ 1\end{bmatrix}\)。只要沿着 \(u\) 的方向更新参数,损失就会减小,如下面的误差曲面所示:
实践上,一般并不会实现这种方法,因为计算二次微分、特征值和特征向量等等运算太过复杂,效率不高。
那么鞍点和局部最小点这两种关键点,哪个更为常见呢?
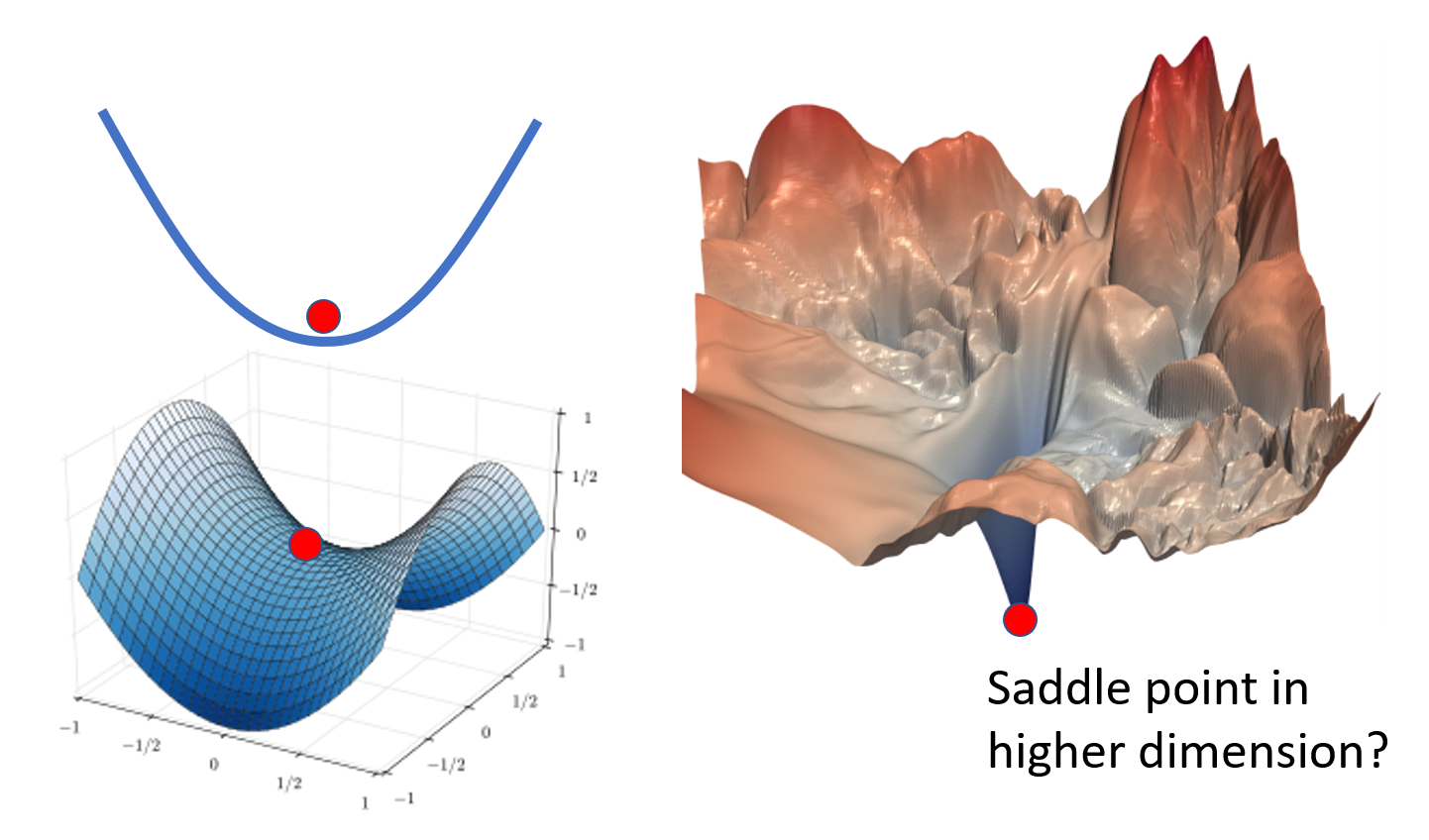
可以看到,二维平面上的局部最小点,可能到三维乃至更高位的空间内就是一个鞍点,因为更多的维数意味着更多的逃离局部最小的可能。所以当参数足够多的时候,鞍点的数量可能相对更多一些。
事实上,上述理论有实践经验的支撑,如下图所示:
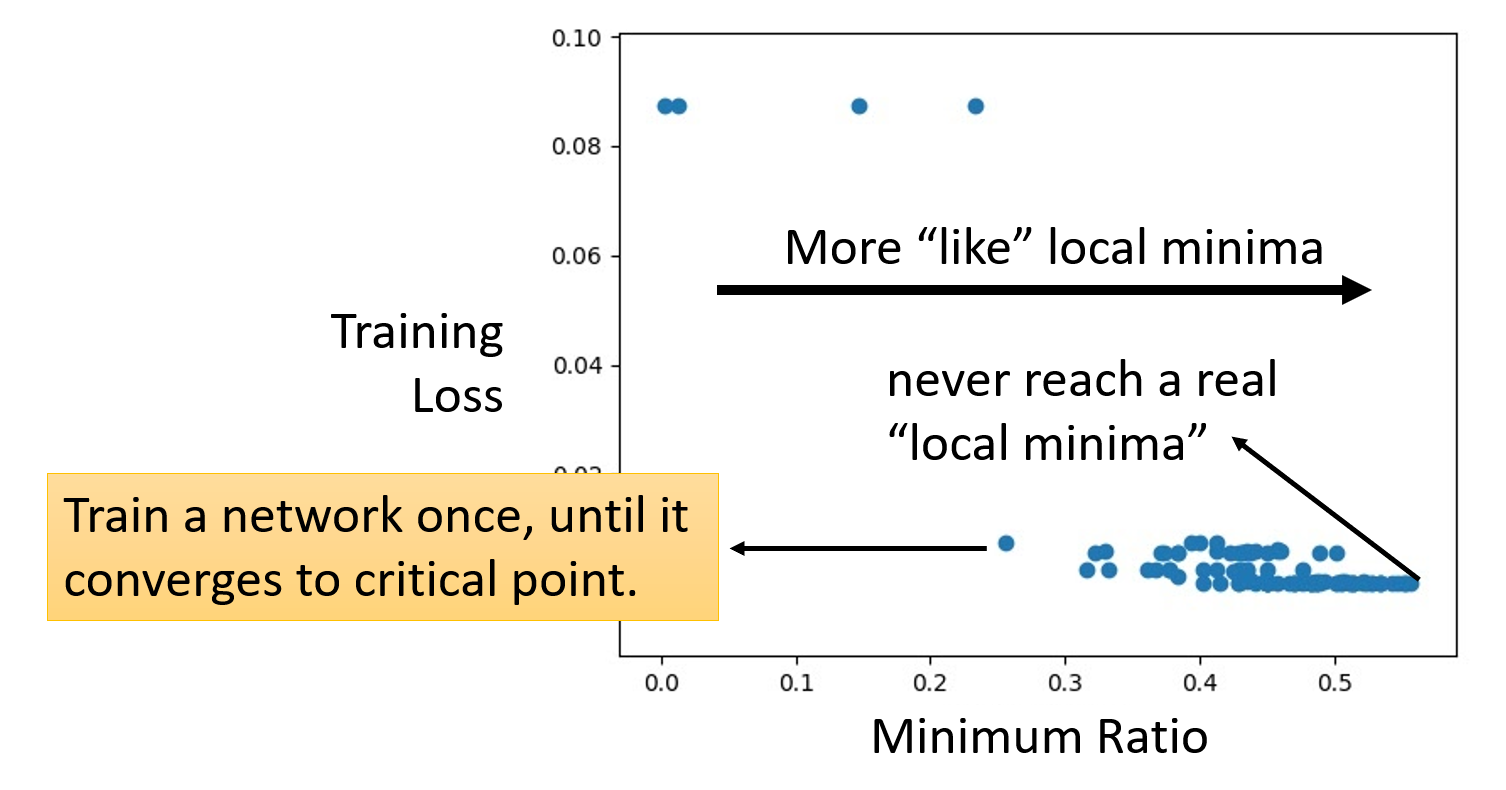
其中横轴表示最小值比率(minimum ratio),即局部最小点在所有关键点中的占比,计算公式为:
可以看到,当我们通过不断的训练将损失降得尽可能低时,最小值比率维持在 0.5-0.6 之间,也就是说始终没法达到真正的局部最小值(最小值比率 = 1
Batches⚓︎
前面提到过,对于参数量很大的模型,会分批(batch) 使用梯度下降法来更新参数,而不是一次性对所有参数求梯度。下面就通过对比更新小批量和大批量参数的效果,来说明为何需要分批更新。
假如模型有 N = 20 的参数,现提供两种(极端的)大小:大批的大小为 N,小批的大小为 1。下面通过误差曲面来分析两者的优化效果:
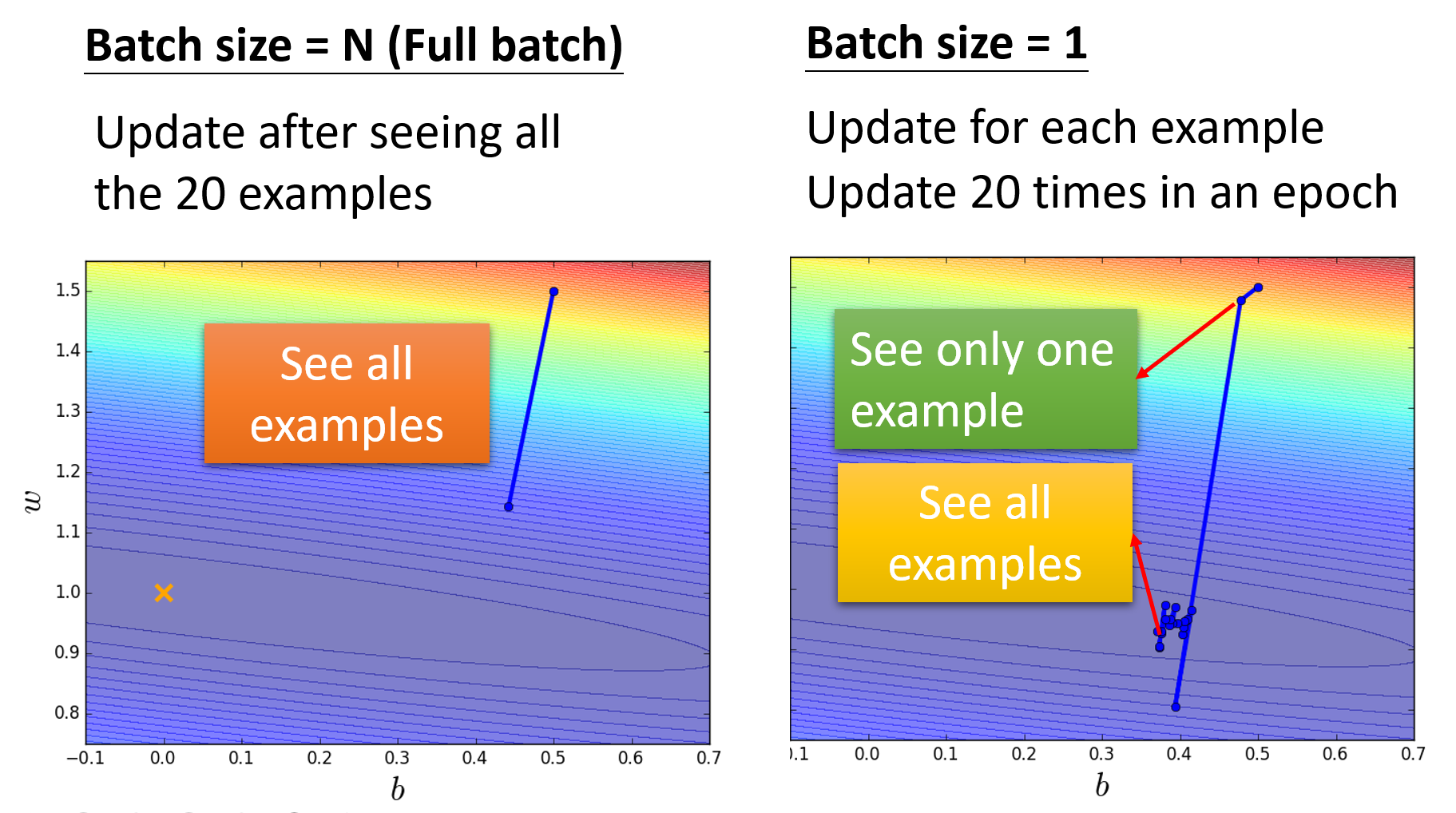
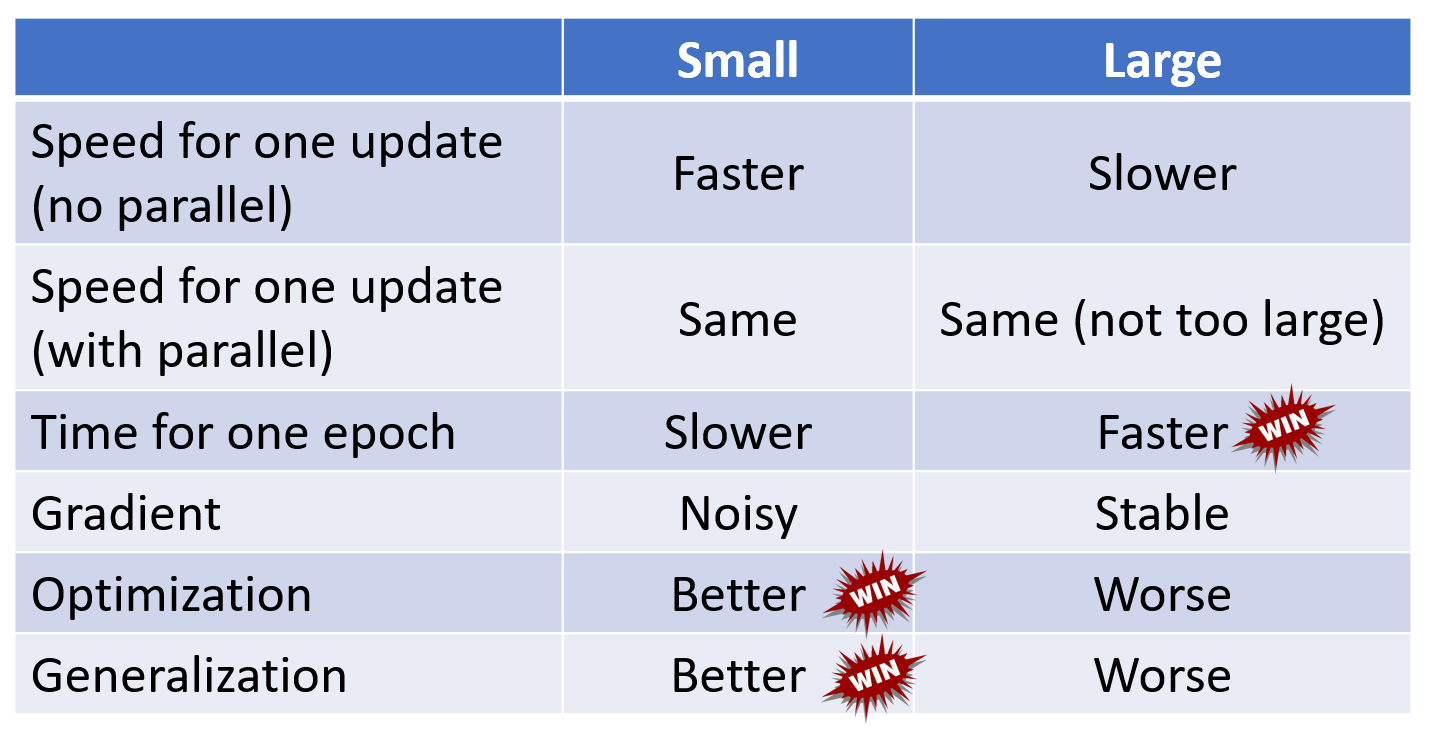
- 大批量:更新时间长(要处理 20 个参数
) ,但是优化效果很好(powerful) - 小批量:更新时间很短(1 次只更新 1 个参数
) ,但是有很多噪点(noisy)
因此直接看貌似看不出两者有哪个能占据很大优势。其实上面只是做了理论层面的分析,实际上在机器学习中常常用到 GPU,而 GPU 的一大优势在于支持并行计算,因此我们得重新考虑时间上的估量了:
-
大批量并不意味着需要花更长的时间计算梯度(除非批量太大)
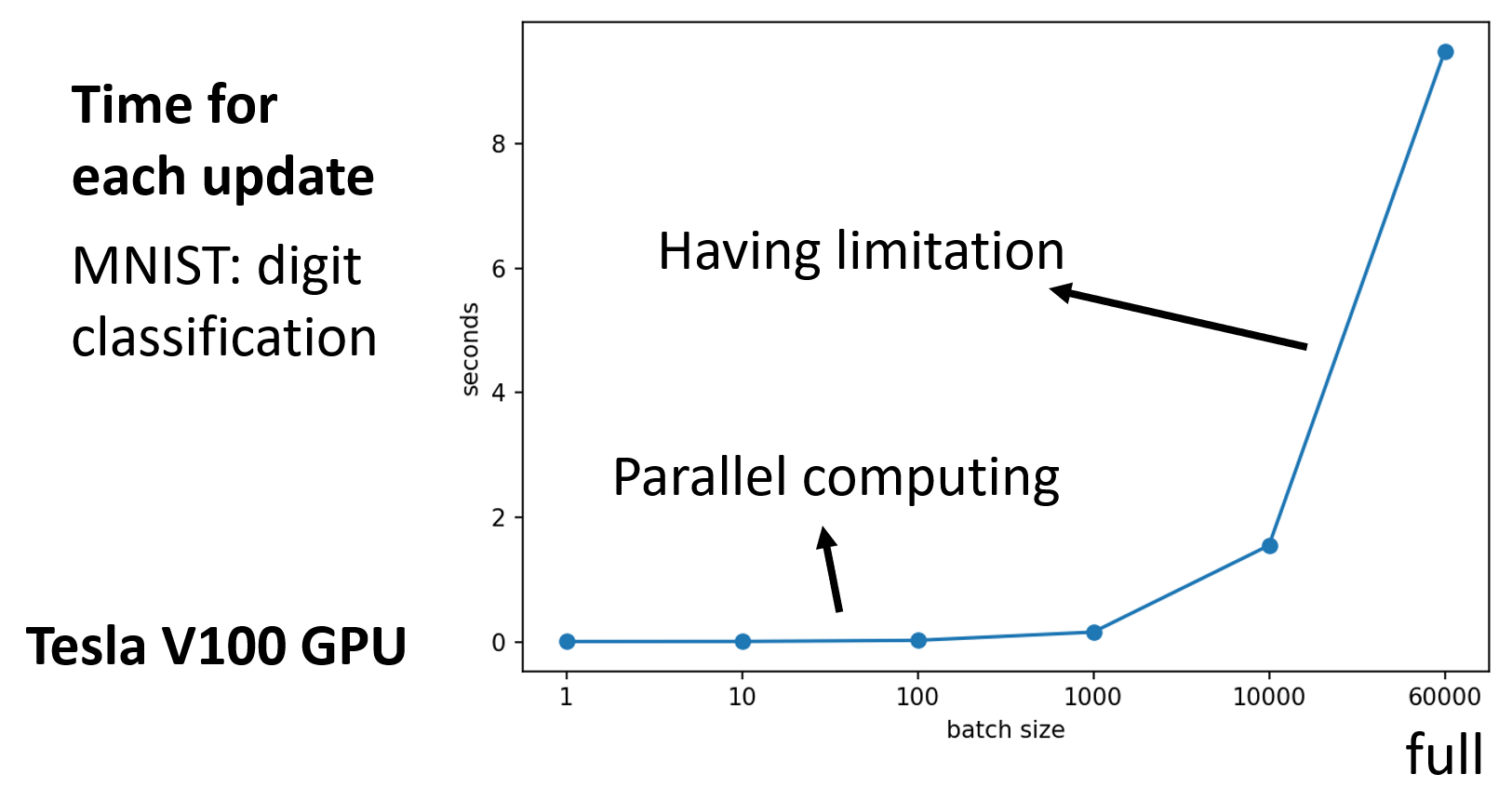
-
在一个时期 (epoch) 内,小批量反而需要花费更多的时间
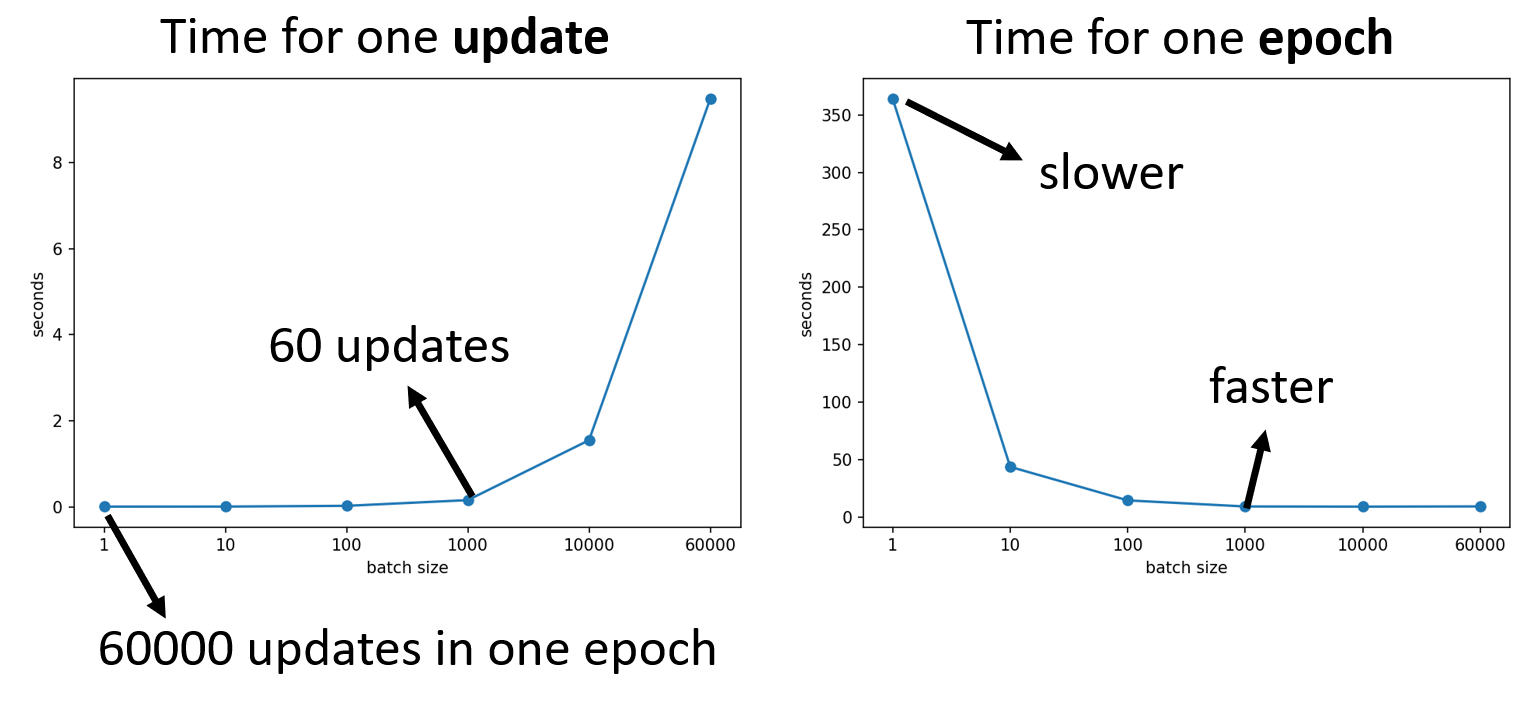
尽管小批量在时间上并不占据太大的优势,但是它的强大之处在于能确保训练模型的精度,使模型具备更好的表现。
例子
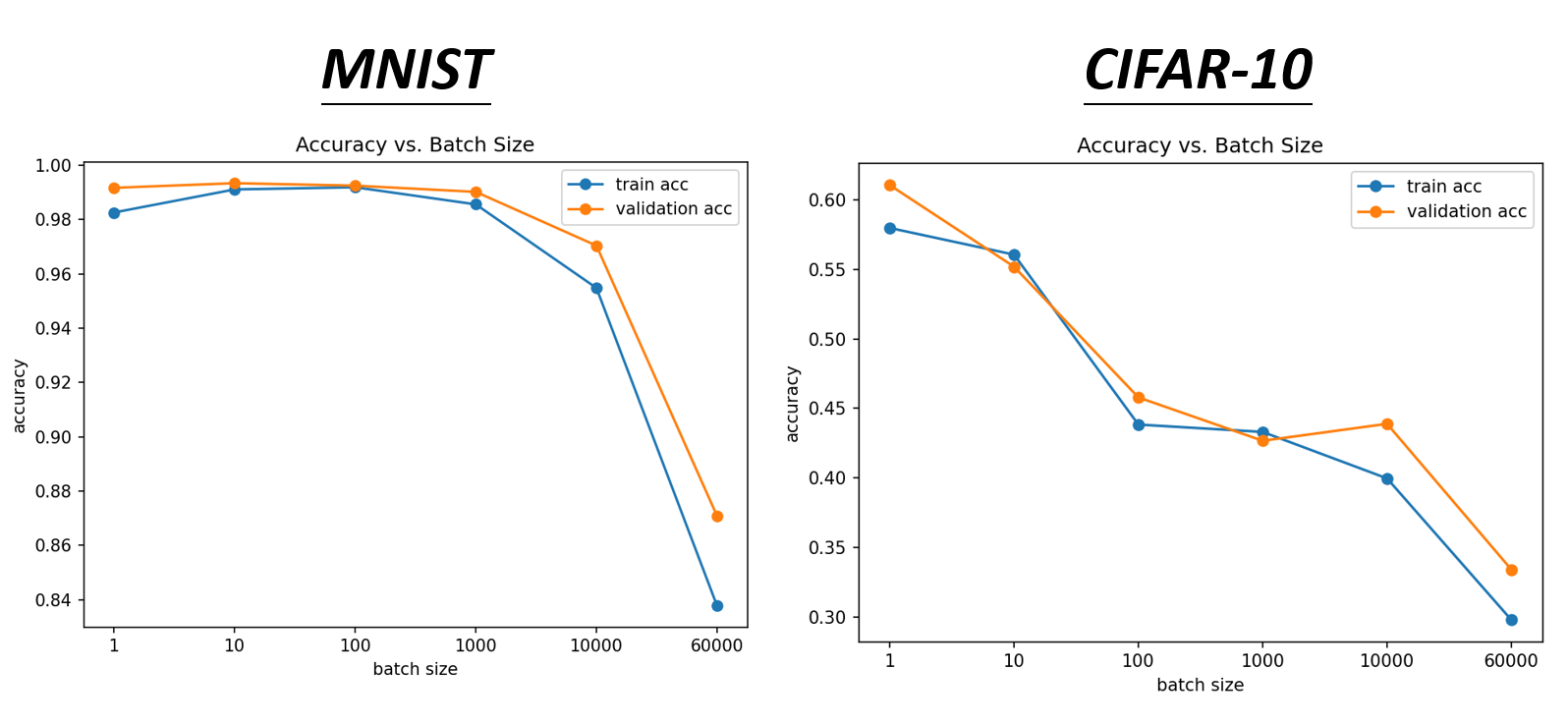
之所以大批量不好,并不是因为模型偏移或过拟合,而是优化上的不足:
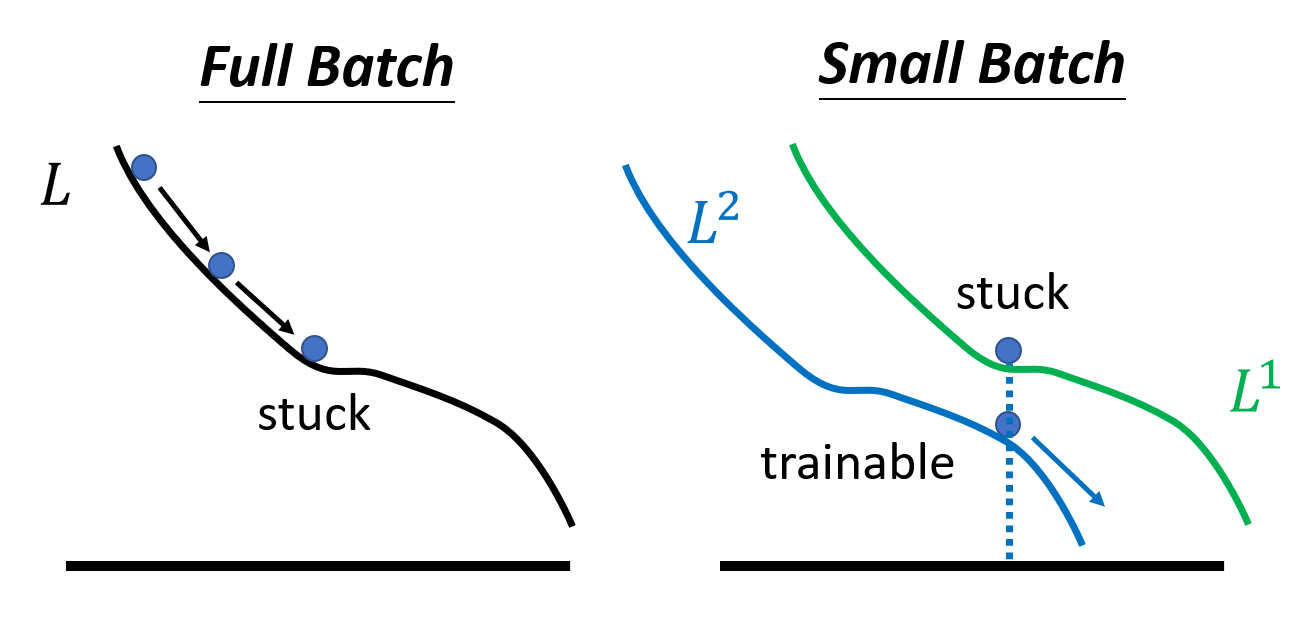
- 对于大批量,尤其是全批量,未知参数关于损失的函数通常只有少数几条甚至一条,因此每次更新都顺着几乎既定的路径走。如果遇到了关键点,那么就很容易卡在那里不动了
- 对于小批量,由于每次只更新一小部分,因此会产生不同的损失函数。即使模型在优化的时候卡在某个损失函数上,只需更新一下,就跳到另一个损失函数,从而有很大概率避开了关键点
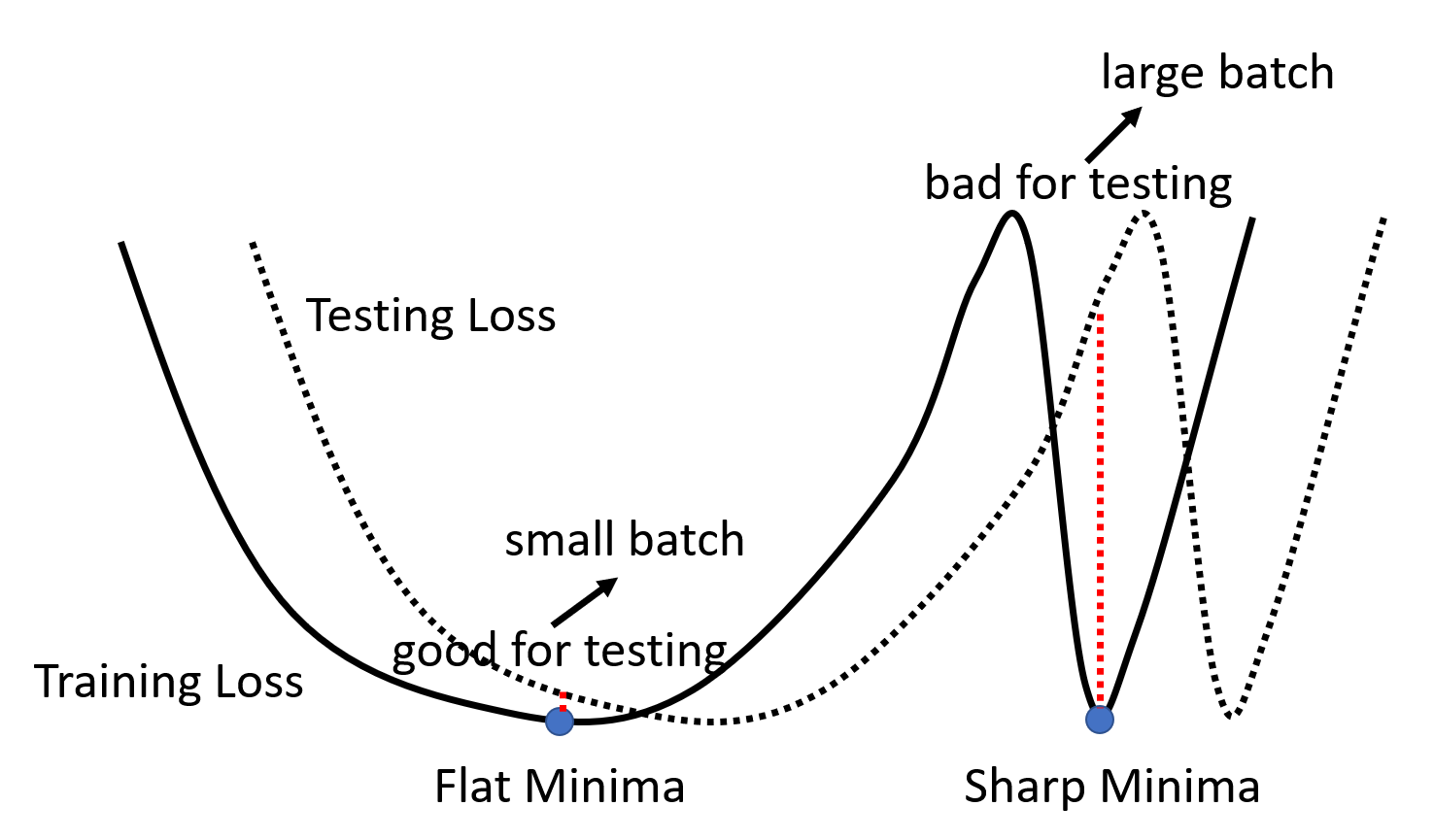
下面从另一个角度解释原因。对于训练数据上的损失函数,不同的局部最小点也有好坏之分,我们会认为狭窄的局部最小点是不利于测试的,而平坦的局部最小点相对而言比较好一些。如下图所示,假如训练数据上和测试数据上的损失函数有些错误匹配 (mismatch),那么局部最小点的好坏之分就表现得非常明显了:平坦的局部最小点在测试数据上没多大变动,而狭窄的局部最小点在测试数据上的损失就一下子变得很高。对于小批量而言,由于它的更新策略更具灵活性(noisy
总结
批量大小是一个超参数(hyperparameter),我们可以根据需要进行手工调整。
在线 vs 离线
我们可以将两种极端情况——一次只更新一笔数据(最小的批量
- 在线:当内存空间有限时,我们可以采用此法
- 离线:当内存空间足够时,且需要更简单的训练过程时,采用此法
在之后的讨论中,我们默认采用离线算法。
Batch Normalization⚓︎
由于误差曲面过于崎岖对训练带来不小的障碍,因此我们希望改善误差曲面的状况,而本节介绍的批量归一化(batch normalization) 正是其中一种解决方案。在正式介绍前,我们先来看这样一个误差曲面:
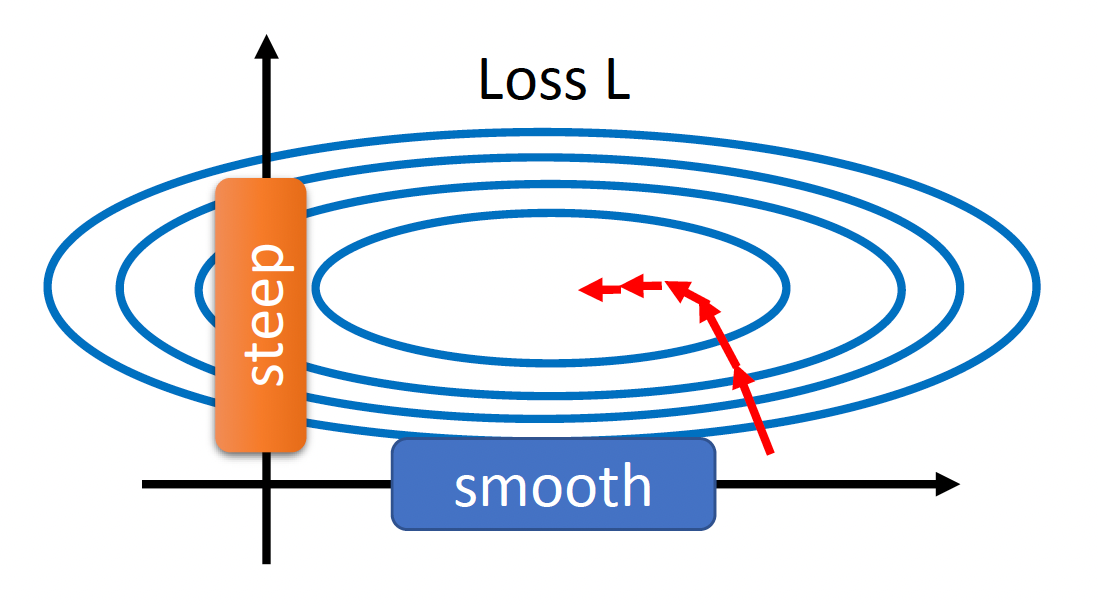
可以看到,沿着参数 \(w_1\) 变化的误差曲面较为平缓,而沿着参数 \(w_2\) 变化的误差曲面就比较陡峭。
一种可能的解释是:
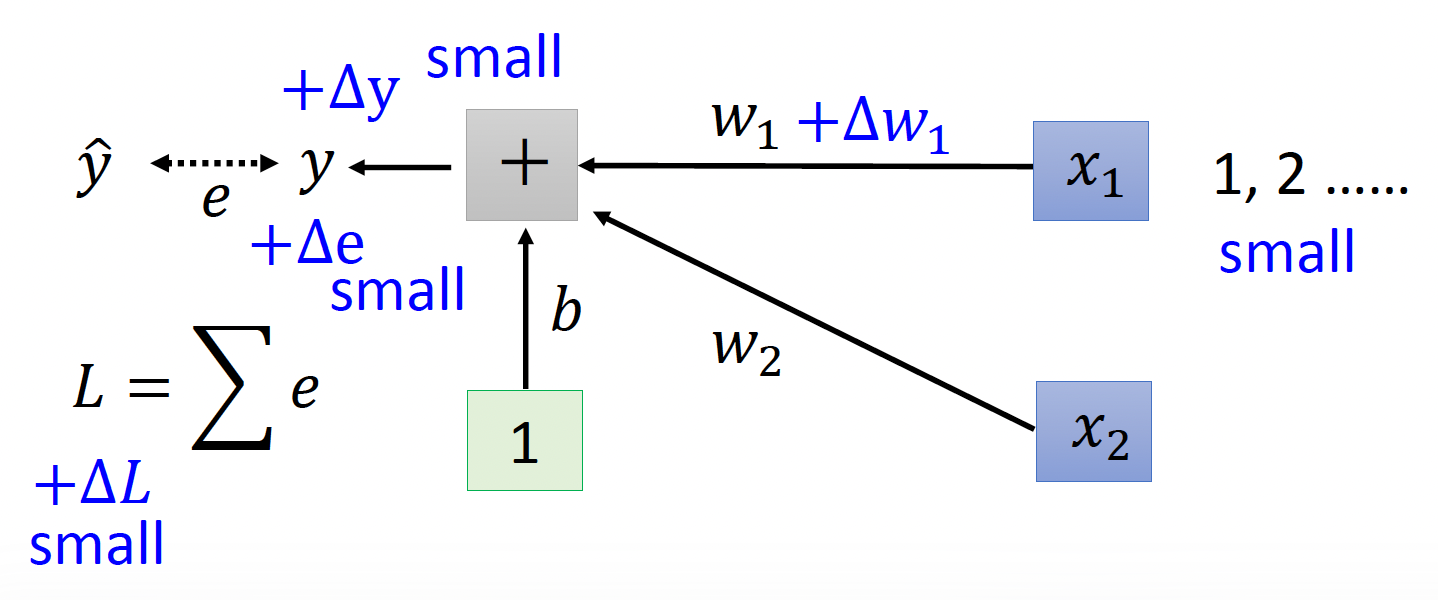
-
假如对 \(w_1\) 做一个微小扰动 \(\Delta w_1\),如果对应的输入值 \(x_1\) 很小的话,那么该扰动对误差的影响 \(\Delta L\) 也不会很大。
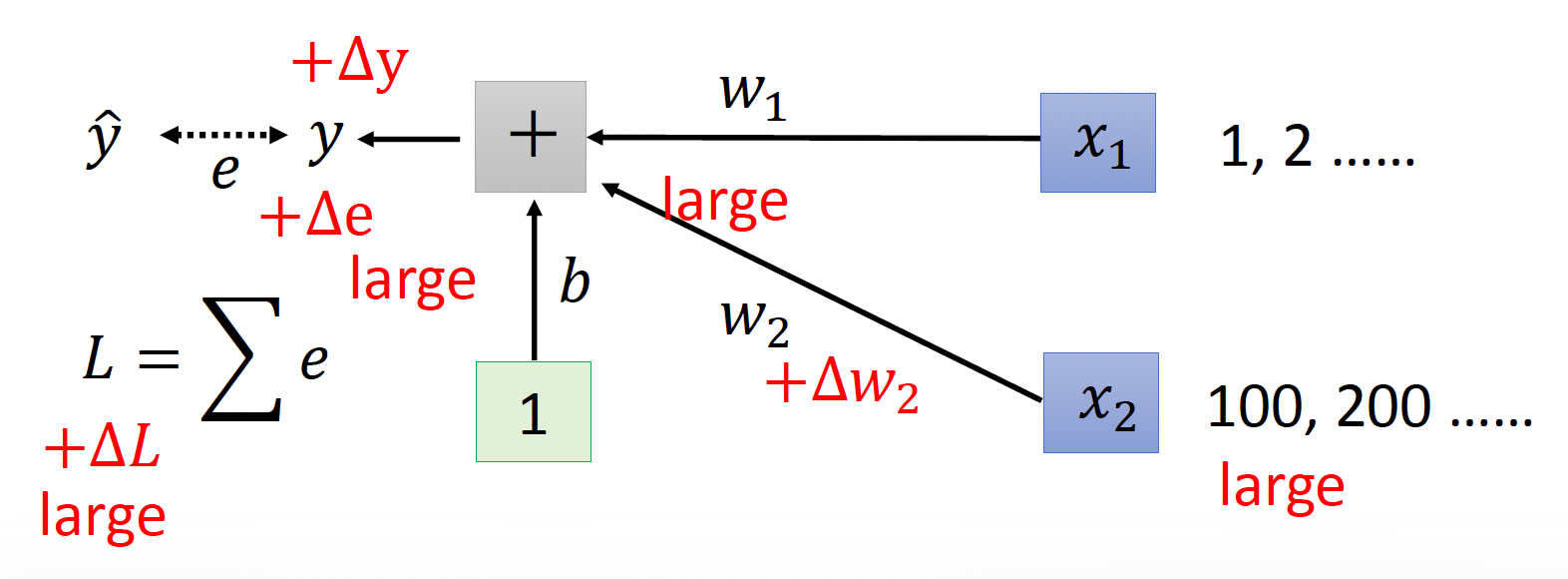
-
假如对 \(w_2\) 做一个微小扰动 \(\Delta w_2\),如果对应的输入值 \(x_2\) 较大的话,那么该扰动对误差的影响 \(\Delta L\) 就相对较大。
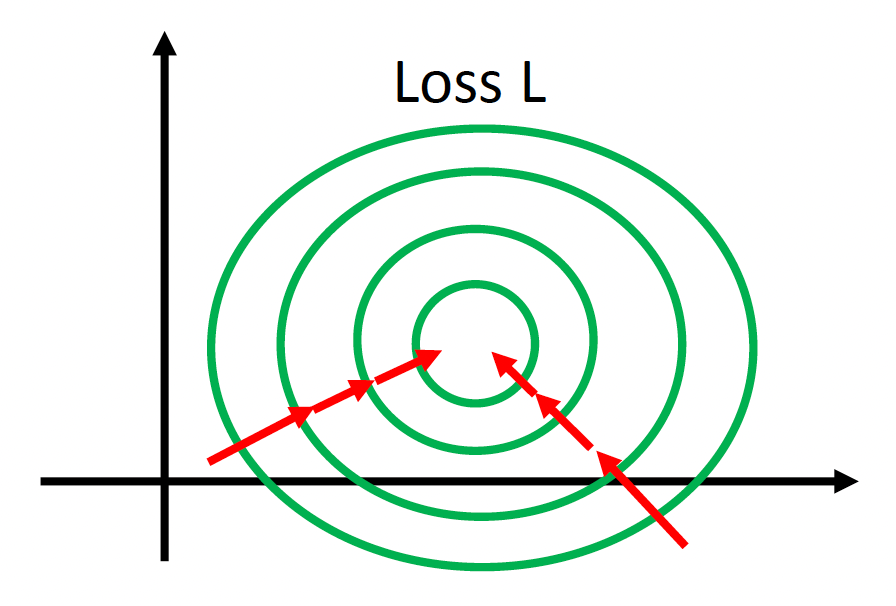
现在,我们的目标是让误差曲面无论沿 \(w_1\) 变化还是沿 \(w_2\) 变化,变化率的差别应尽可能接近,也就是让误差曲面变成这样:
再来看特征归一化(feature normalization) 的操作。下图给出了 \(R\) 个输入向量,每个输入向量 \(x^r\) 的每个元素对应一个维度(用绿色方框框出
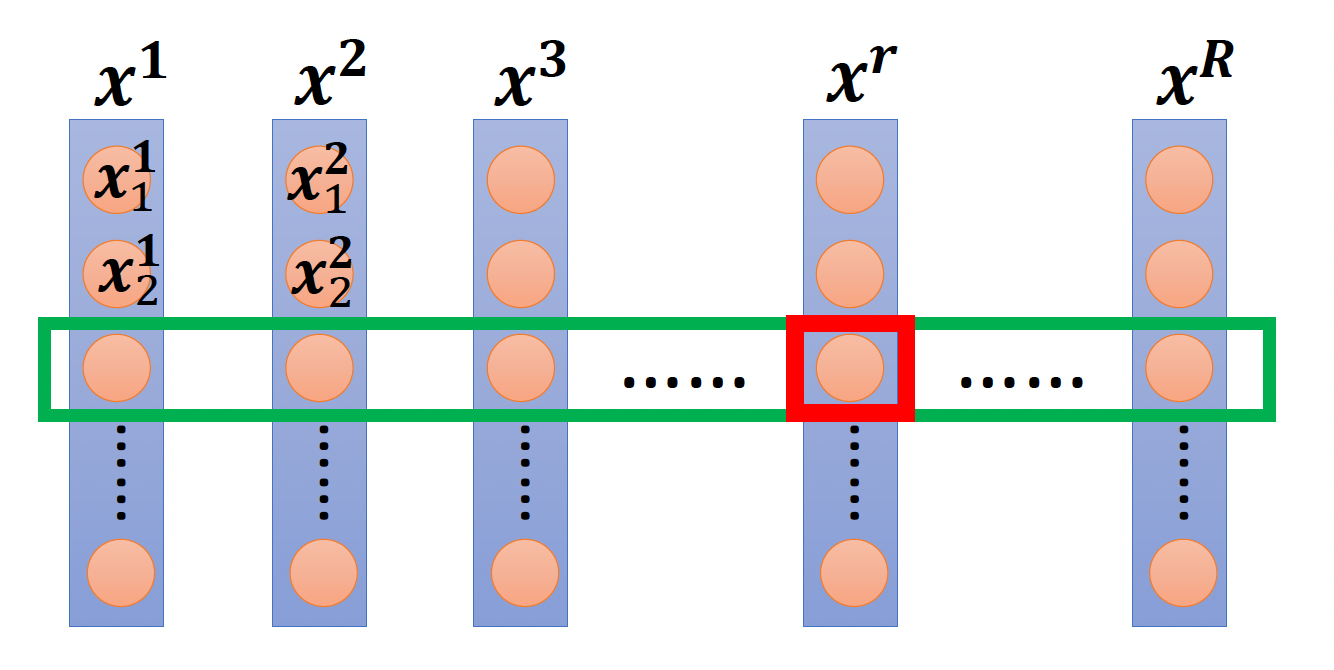
那么第 \(r\) 个向量在第 \(i\) 个维度上的归一化结果 \(\widetilde{\bm{x}}_i^r \leftarrow \dfrac{\bm{x}_i^r - m_i}{\sigma_i}\)。而归一化操作能确保所有维度的均值为 0,标准差为 1。
一般来说,特征归一化能让梯度下降收敛得更快。
接下来考虑特征归一化在深度学习中的应用:
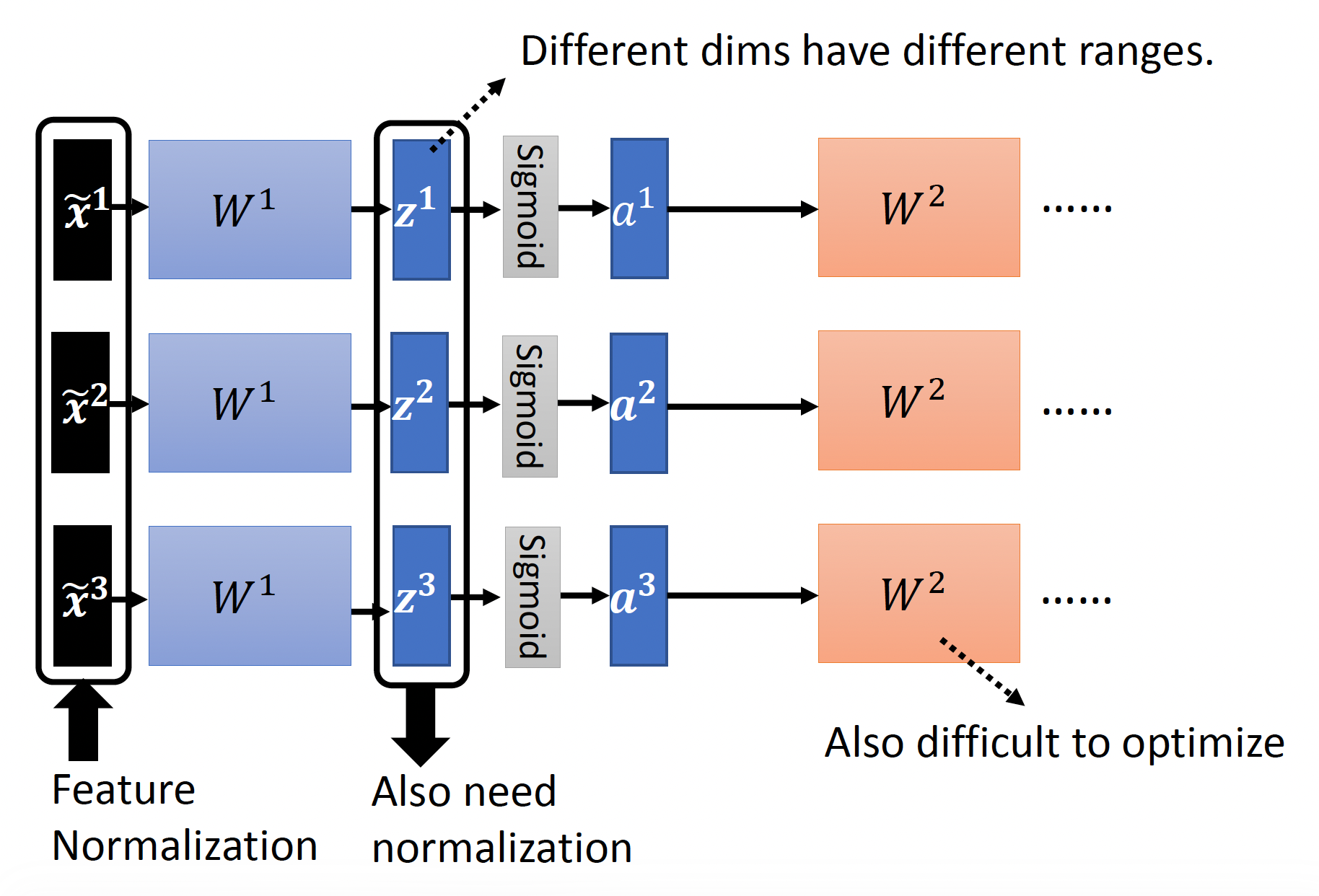
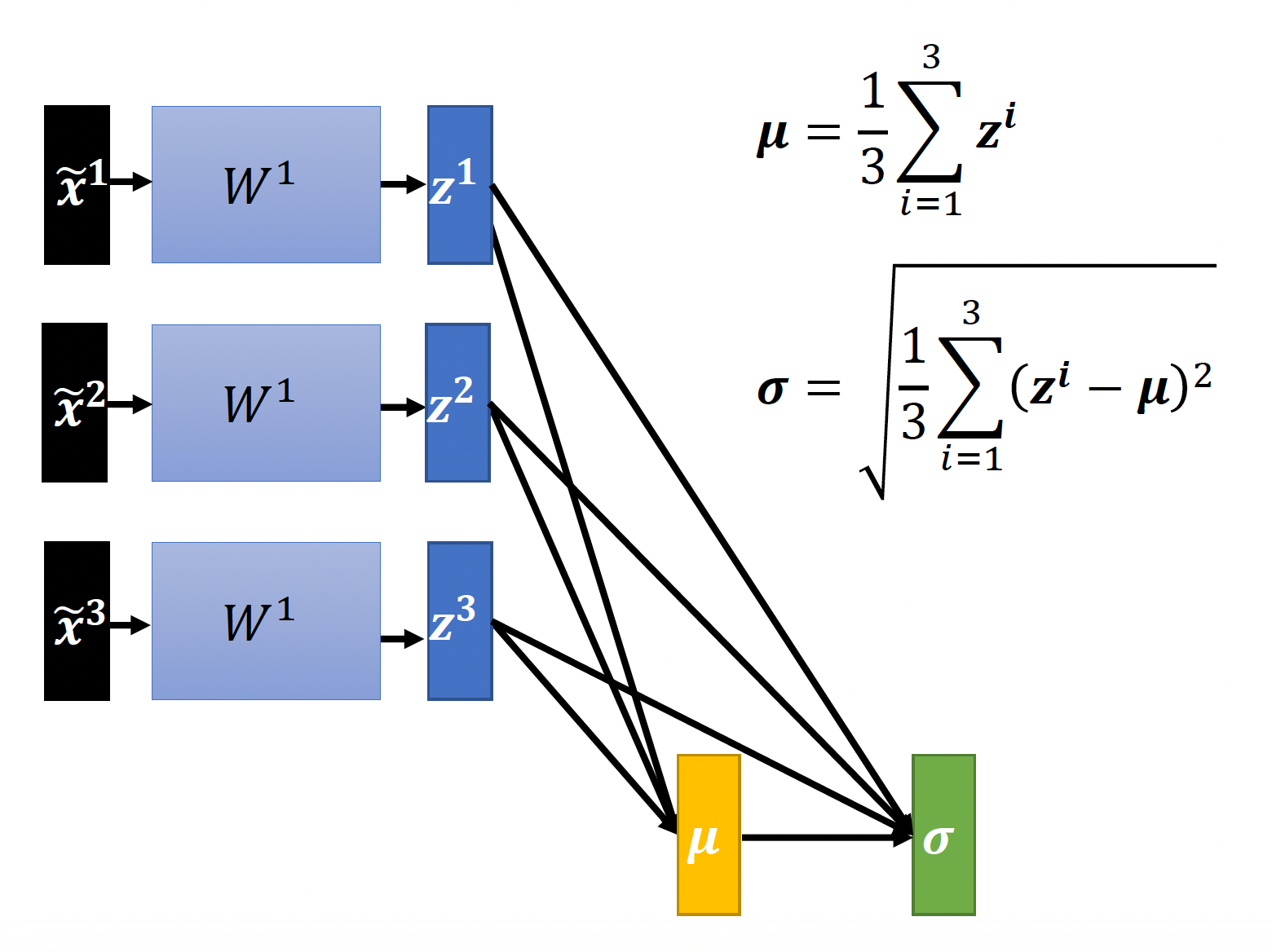
我们将特征归一化后的输入向量丢到隐藏层中继续计算,中间会得到与参数矩阵相乘后的向量 \(\bm{z}\) 和输出向量(或者是下一层的输入向量)\(\bm{a}\)。显然,在进行下一层的计算前也要进行归一化处理,那么到底是归一化 \(\bm{z}\) 还是归一化 \(\bm{a}\)。从实践上来看,两者效果差不多,而且当激活函数是 sigmoid 的时候对 \(\bm{z}\) 做归一化可能更好,所以后面我们就认准对 \(\bm{z}\) 做归一化。计算过程如下:
上述操作有个问题:如果这个网络接收的输入量很大很大(这里只画出了 3 个
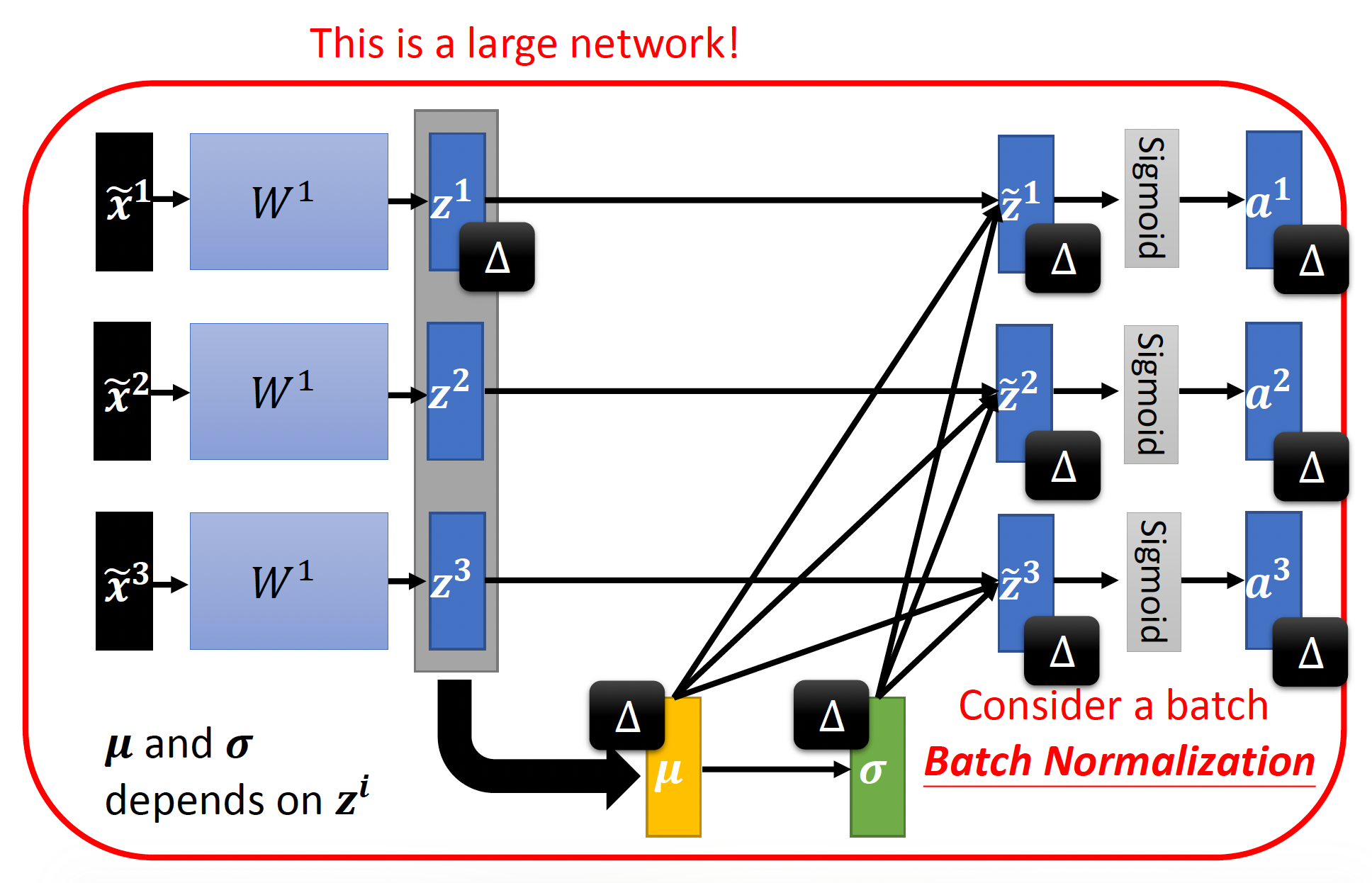
在硬件资源有限的情况下,这种计算量肯定是吃不消的。所以实际上我们不会一次性去看整个网络的输入,而是一批批地看(每批包含的输入个数不能太少,也不能太多
前面说过,归一化能保证结果均值为 0,标准差为 1。但有时我们不太希望有这样的限制(也许这种限制会带来负面影响
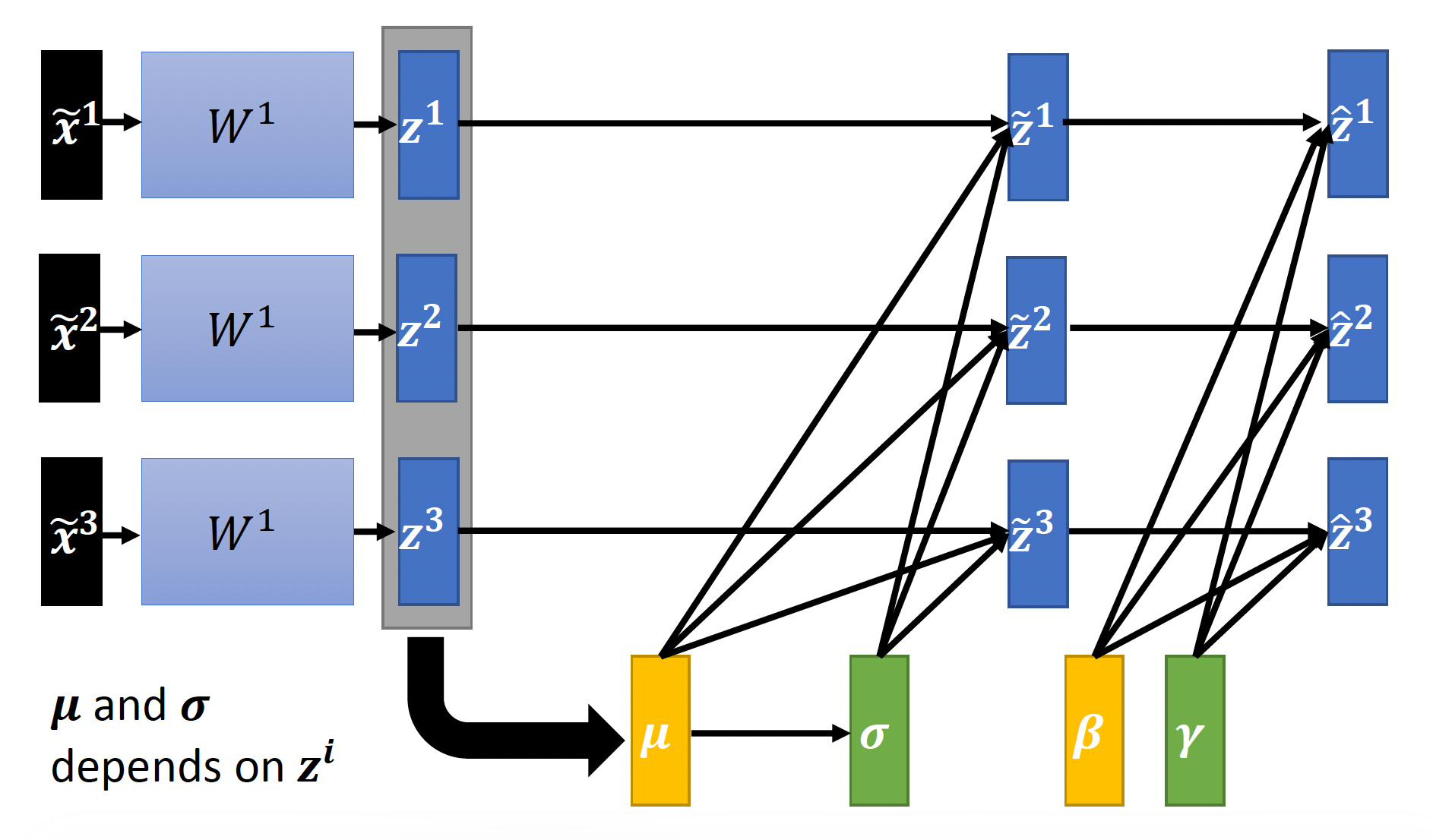
然而,在测试阶段的时候,我们无法保证测试数据都是一批批过来的(总不至于要等达到一定数量后再开始计算吧
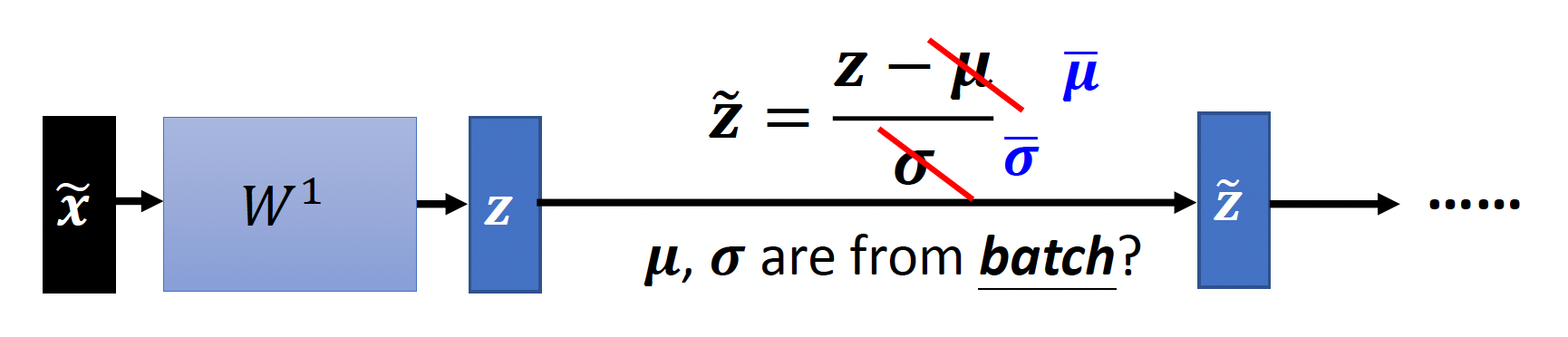
这里的 \(\overline{\mu}, \overline{\sigma}\) 是在训练过程中从每批的 \(\mu, \sigma\) 中得到的移动平均量(moving average)。以 \(\mu\) 为例,假如我们得到了每批对应的 \(\mu\) 为 \(\mu^1, \mu^2, \dots, \mu^t\),那么 \(\overline{\mu} \leftarrow p \overline{\mu} + (1 - p) \mu^t\)。
下图展现了各种方法在不同数据量的训练效果(纵轴表示准确率)
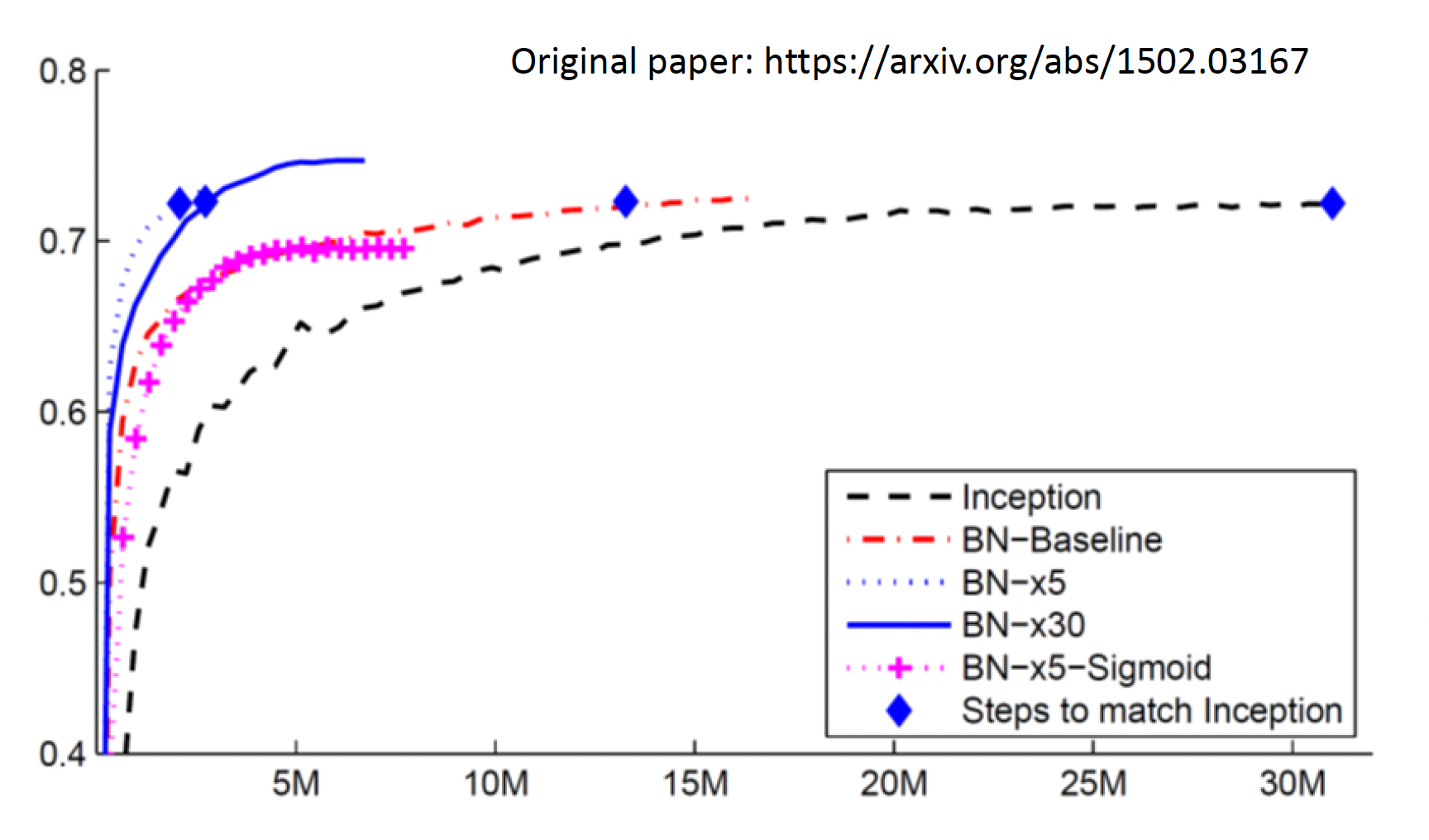
其中黑色曲线表示的是一般方法,红色曲线标识最基本的批量归一化。不难发现批量归一化相比一般方法能以更少数据达到相同的准确率,即收敛速度更快。而且如果学习速率更快的话,收敛得还要快。但并不是学习速率越大越好(可以看到 BN-x30 不如 BN-x5
那么为什么批量归一化能够取得这样好的效果呢?有人提出了一种称为内部协变量偏移(internal covariate shift) 的观点。来看这张图:
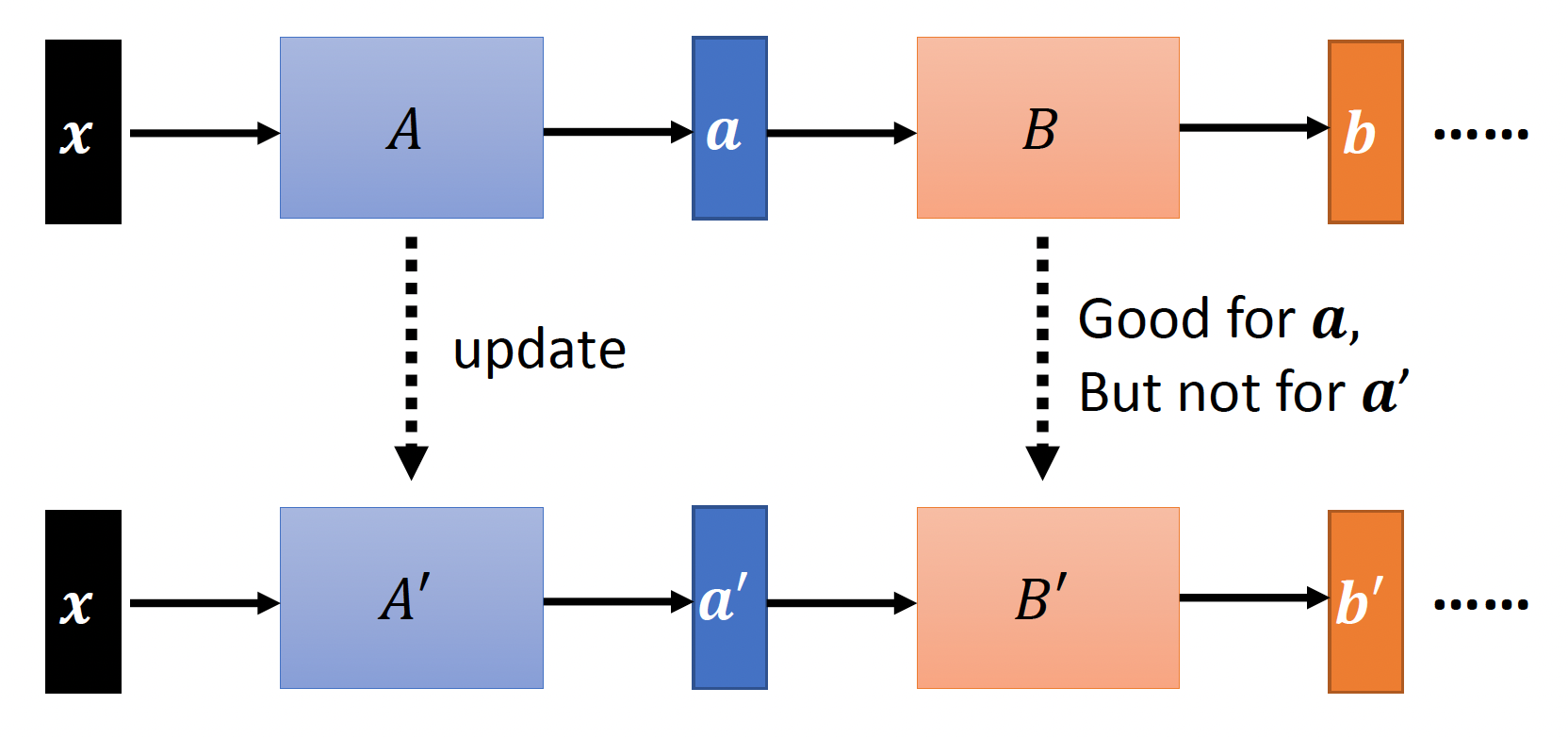
假如某一层的参数矩阵从 \(A\) 变成了 \(A'\),这样我们得到了更好的输出 \(a'\),但是这种改变会影响到后面隐藏层的计算——原来下一层的参数矩阵 \(B\) 更适合算 \(a\) 而不是 \(a'\),所以问题变得更复杂了。而批量归一化能够保证 \(a\) 和 \(a'\) 有着相似的统计学信息,因此能尽量减小上述问题的影响。
然而,一篇名为 How Does Batch Normalization Help Optimization? 的 paper 通过实验反驳上述观点。它说明了内部协变量偏移不一定是训练时的问题(就算 \(a, a'\) 相差很大也不会对训练效果有太大影响
更多的归一化方法
Momentum⚓︎
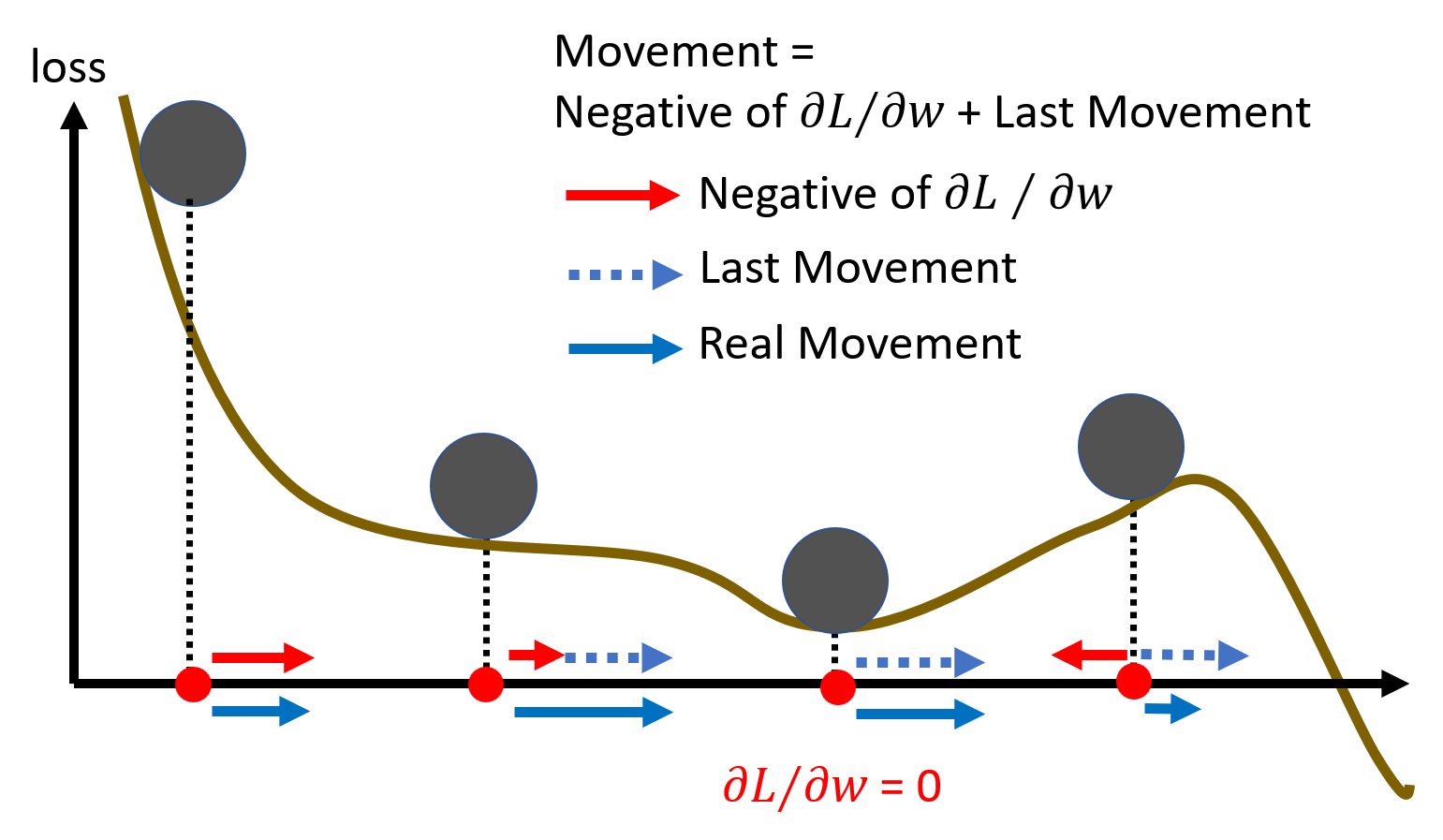
在梯度下降法中,当梯度接近于 0 的时候,就会停在这些点上了。但是在物理世界中,即使某段路相当平坦(鞍点
对比
在正式介绍该方法前,先来总结一下一般的梯度下降法,如下图所示。由于比较直观,这里就不再赘述了。
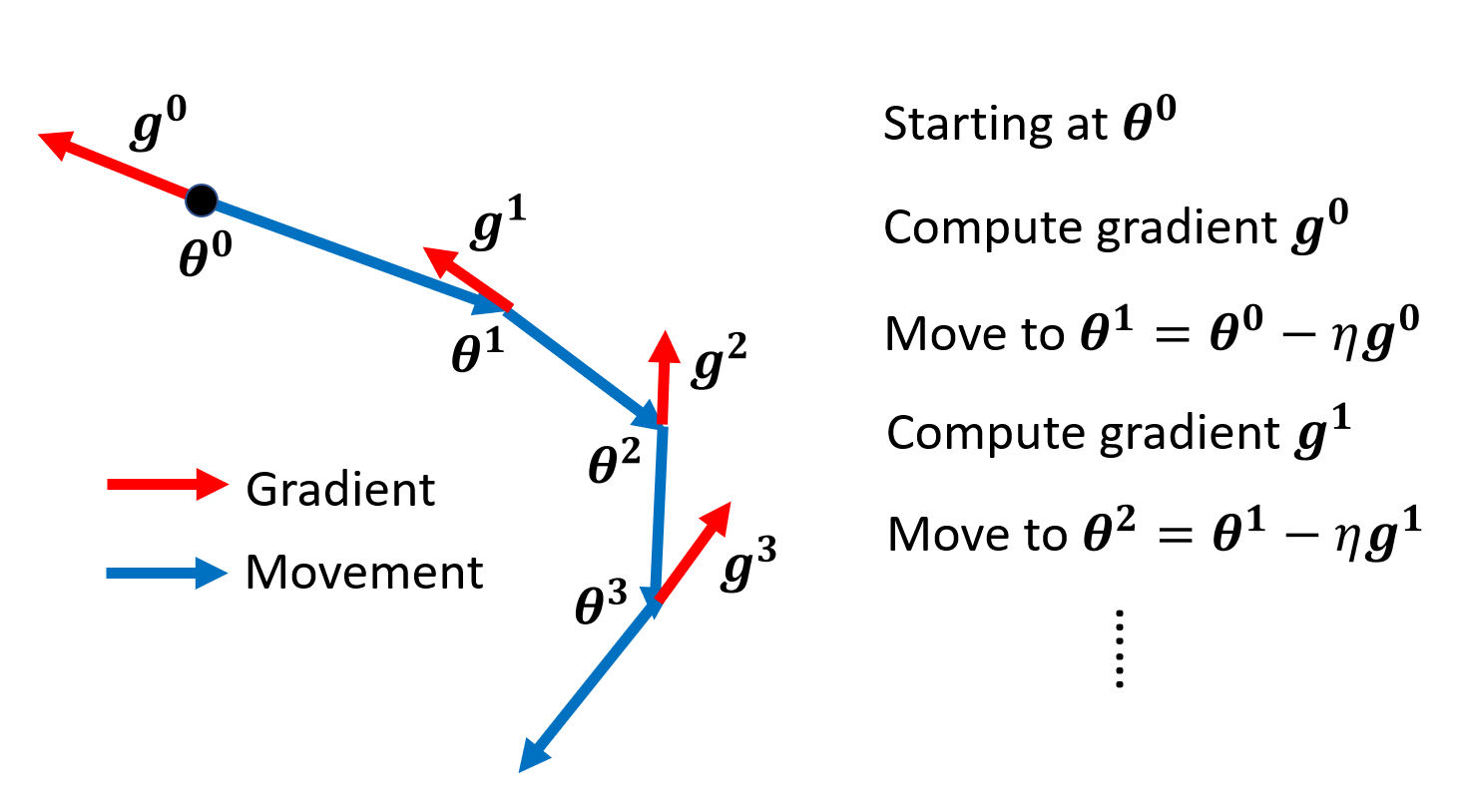
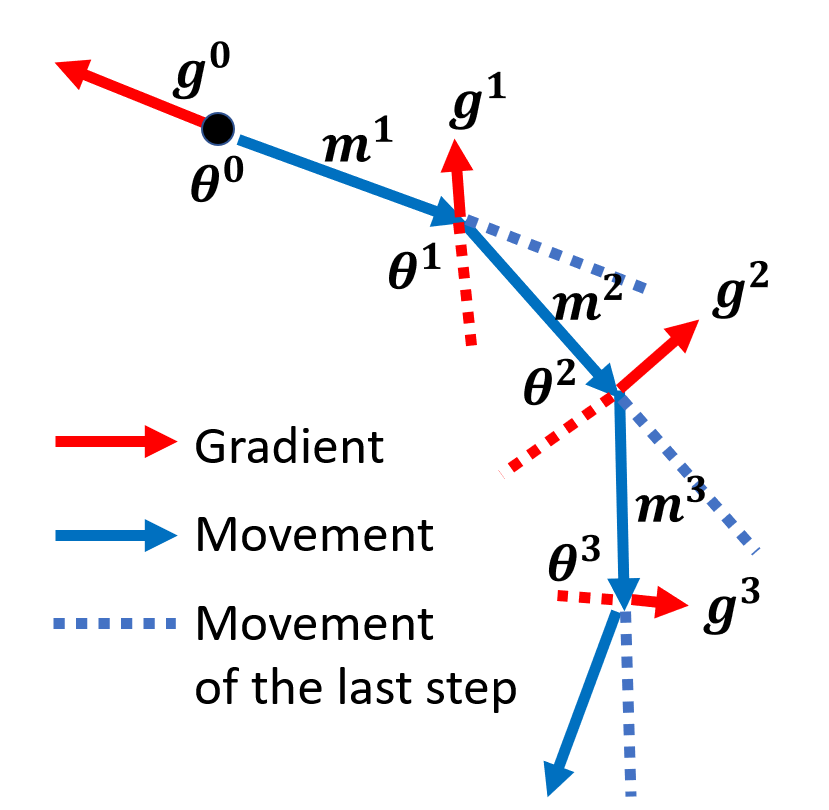
现在引入动量,那么每步的移动就是上一步的移动与当前梯度的差,具体来说:
- 令初始点为 \(\bm{\theta}^0\),移动量 \(\bm{m}^0 = 0\),梯度 \(\bm{g}^0\)
- 第一步移动 \(\bm{m}^1 = \lambda \bm{m}^0 - \eta \bm{g}^0\),下一个目标点 \(\bm{\theta}^1 = \bm{\theta}^0 + \bm{m}^1\),然后计算梯度 \(\bm{g}^1\)
- 第二步移动 \(\bm{m}^2 = \lambda \bm{m}^1 - \eta \bm{g}^1\),下一个目标点 \(\bm{\theta}^2 = \bm{\theta}^1 + \bm{m}^2\),然后计算梯度 \(\bm{g}^2\)
- 以此类推 ...
上述过程如下所示:
观察发现,第 \(i\) 次移动量为前几次梯度 \(\bm{g}^0, \bm{g}^1, \dots, \bm{g}^{i-1}\) 的加权和,比如:
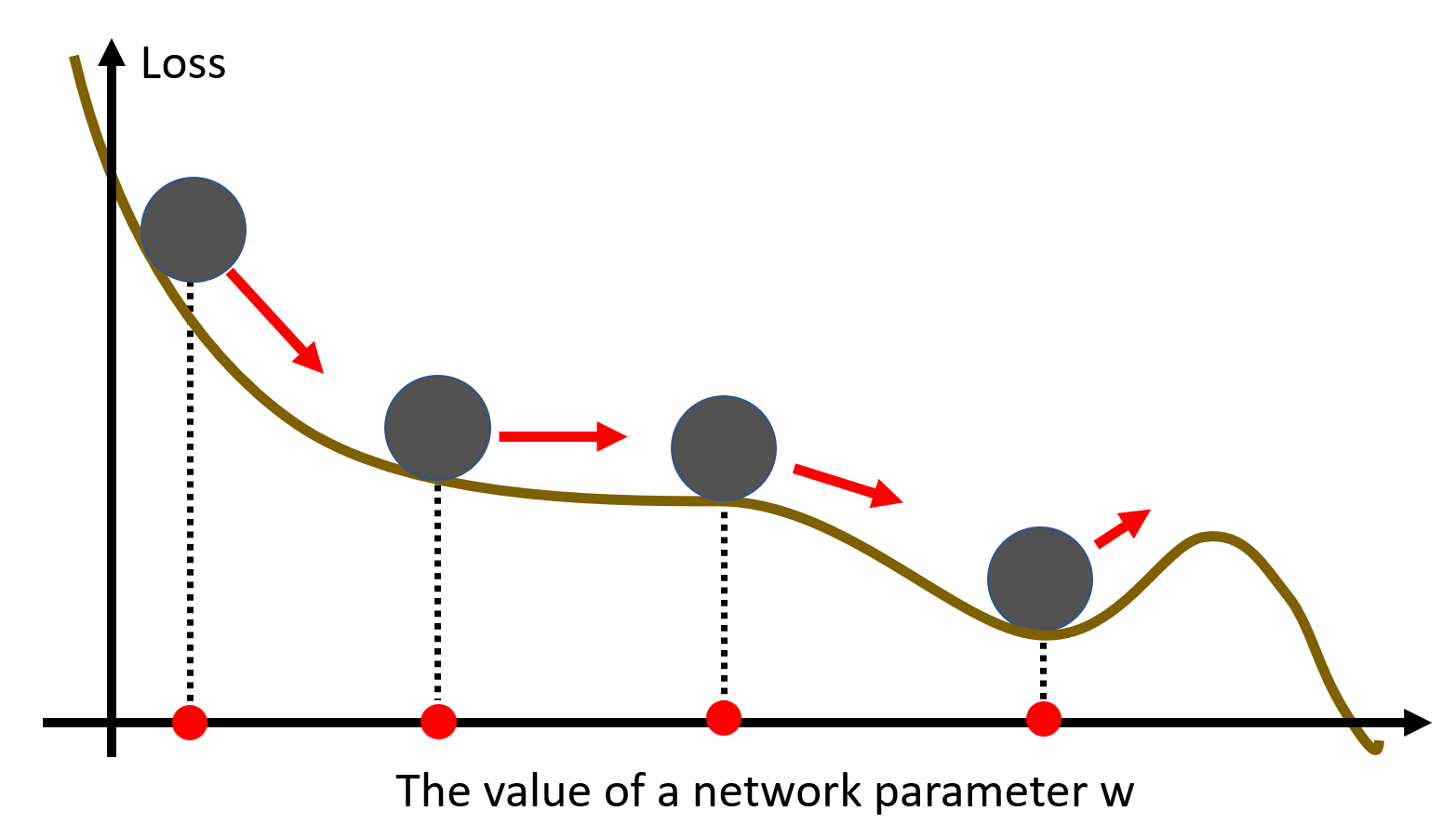
有了动量后,对于本节最开始提到的例子,现在的优化过程就可能像下图一样,不会被某些关键点给困住。
注
梯度下降法 + 动量的优化方法一般简称为 SGDM。
Adaptive Learning Rate⚓︎
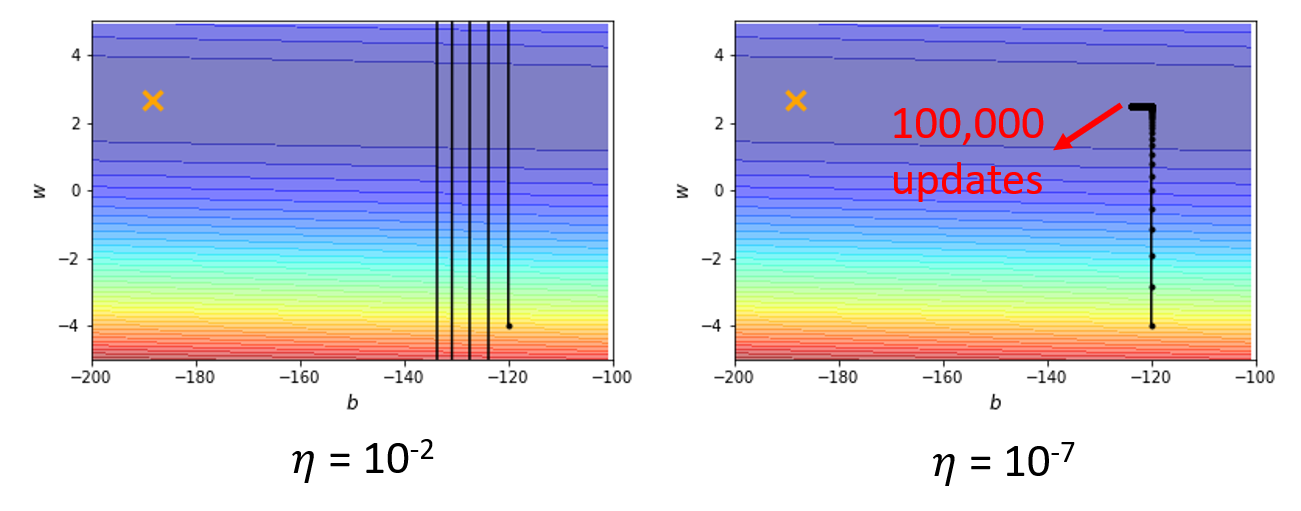
不少人会认为在训练过程中,如果模型无法得到进一步的优化(假定使用梯度下降法优化
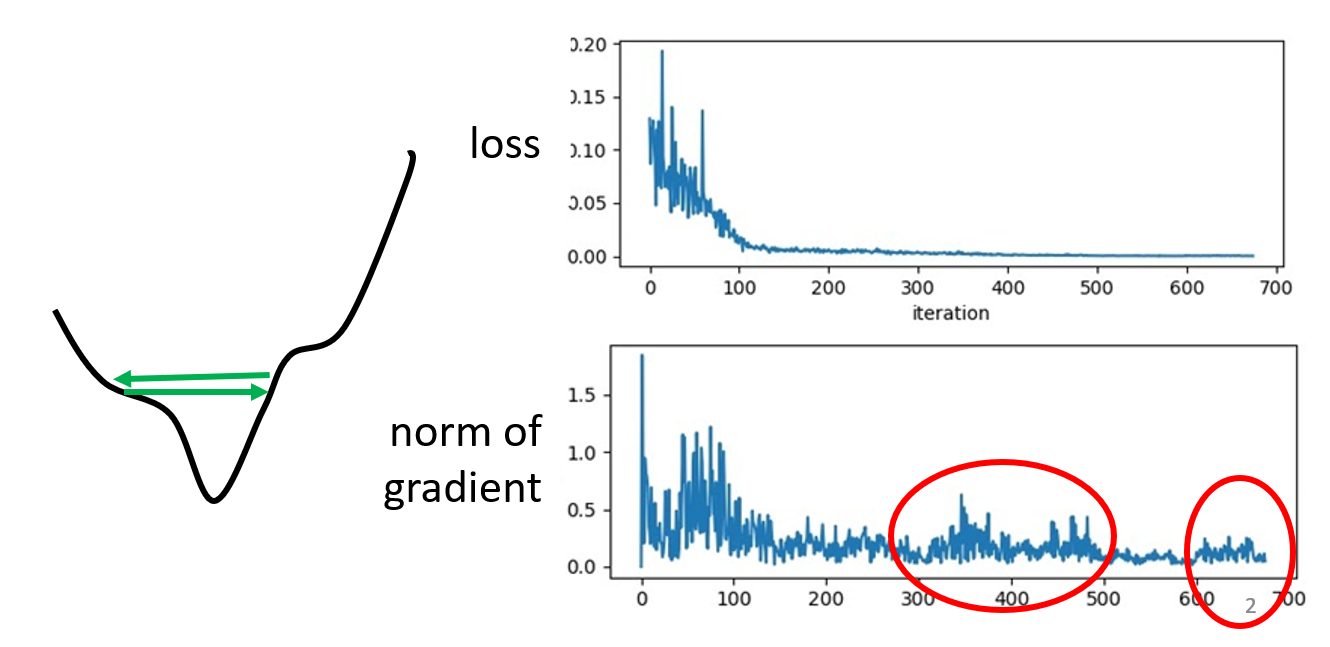
如上图所示,虽然损失值随着迭代次数的增加而逐渐减小,最终趋于稳定,但是梯度的模值仍然不断跳动,这就说明参数并不一定抵达关键点,而有可能出现了像左图所示的情况:由于每次迭代更新的步幅(学习速率)过大,导致参数点在“山坡”之间来回跳动,但此时的梯度值并不接近于 0。接下来再看一个例子:
例子
假如有一张凸 (convex) 的误差曲面,如下所示:
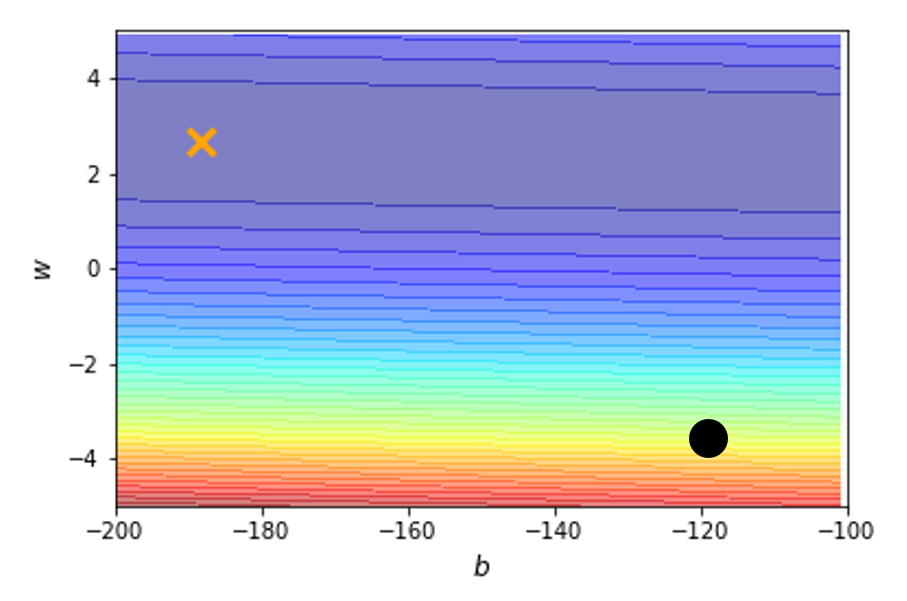
下面是不同学习速率下模型的优化过程:
- 如果学习速率过大,每次迭代更新的步幅就会很大,有些“刹不住车”,难以减小损失
- 如果学习速率过小,每次迭代更新的步幅就会很小,因此当参数点到达了平缓的(梯度较小)区域时,更新速度就会变得很慢很慢,效率就太低了
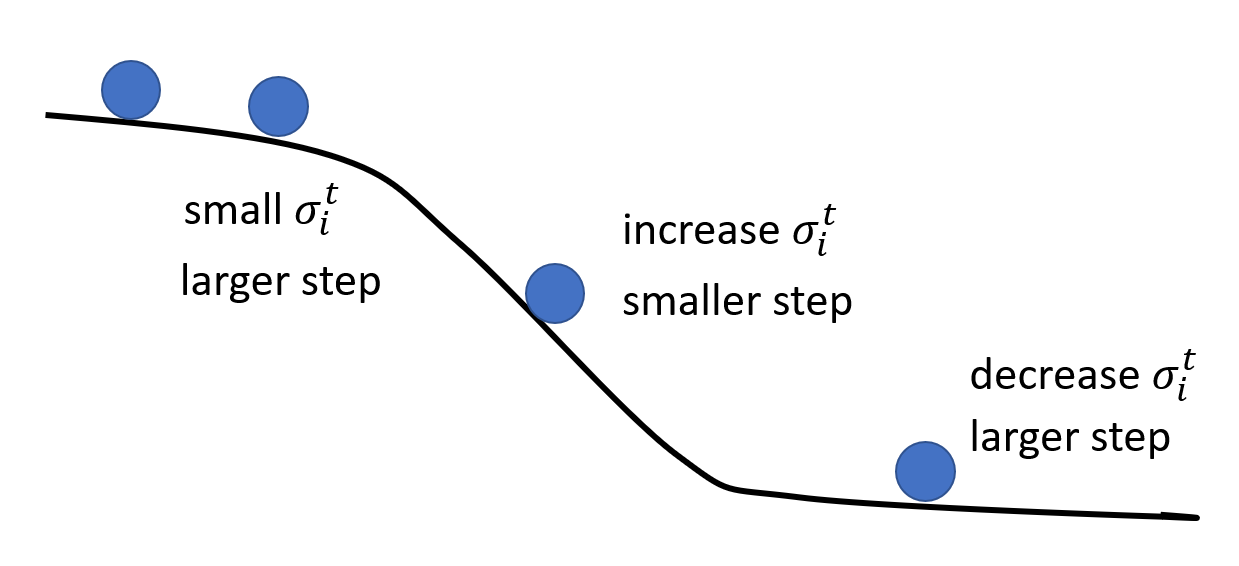
综上,如果学习速率保持不变,就很难达到理想的优化效果。因此,不同的参数应当有不同的学习速率,以适应具体情况:
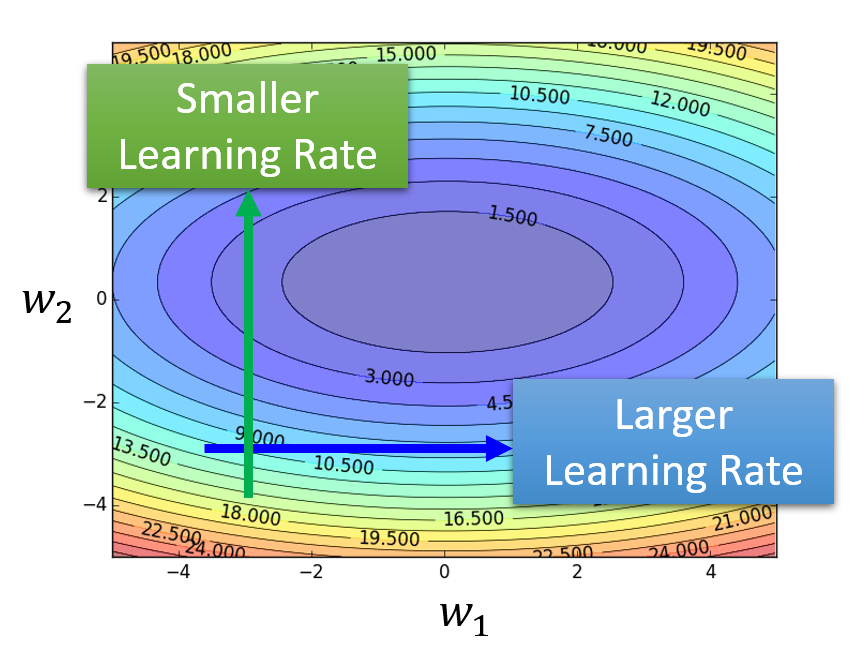
- 当参数在陡峭的误差曲面上的时候,学习速率应该变得更小
- 当参数在平坦的误差曲面上的时候,学习速率应该变得更大
注
方便起见,在本节之后的分析中我们仅考虑参数集 \(\bm{\theta}\) 的其中一个参数 \(\theta_i\)。
Adagrad⚓︎
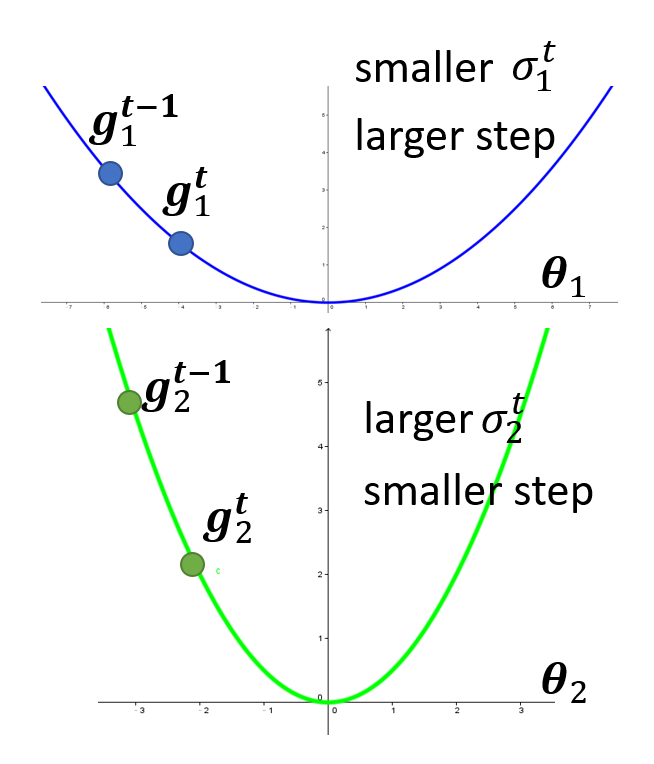
在原来的第 \(t\) 次迭代优化中,参数更新的式子为:\(\theta_i^{t+1} = \theta_i^t - \eta \bm{g}_i^t\),其中 \(\bm{g}_i^t = \dfrac{\partial L}{\partial \bm{\theta}_i} \Big|_{\bm{\theta} = \bm{\theta}^t}\),此时的学习速率是固定的 \(\eta\)。为了让学习速率与参数有关,我们将迭代更新的式子转化为:
其中 \(\sigma_i^t\) 的值为前 \(t\) 次(\(0 \sim t - 1\))迭代的梯度的均方根(root mean square),即:
实际上,这种优化方法称为 Adagrad。这样,对于不同的参数,便可以做到在梯度小的地方,迈的步子更大;在梯度大的地方,迈的步子更小。
RMSProp⚓︎
Adagrad 的问题
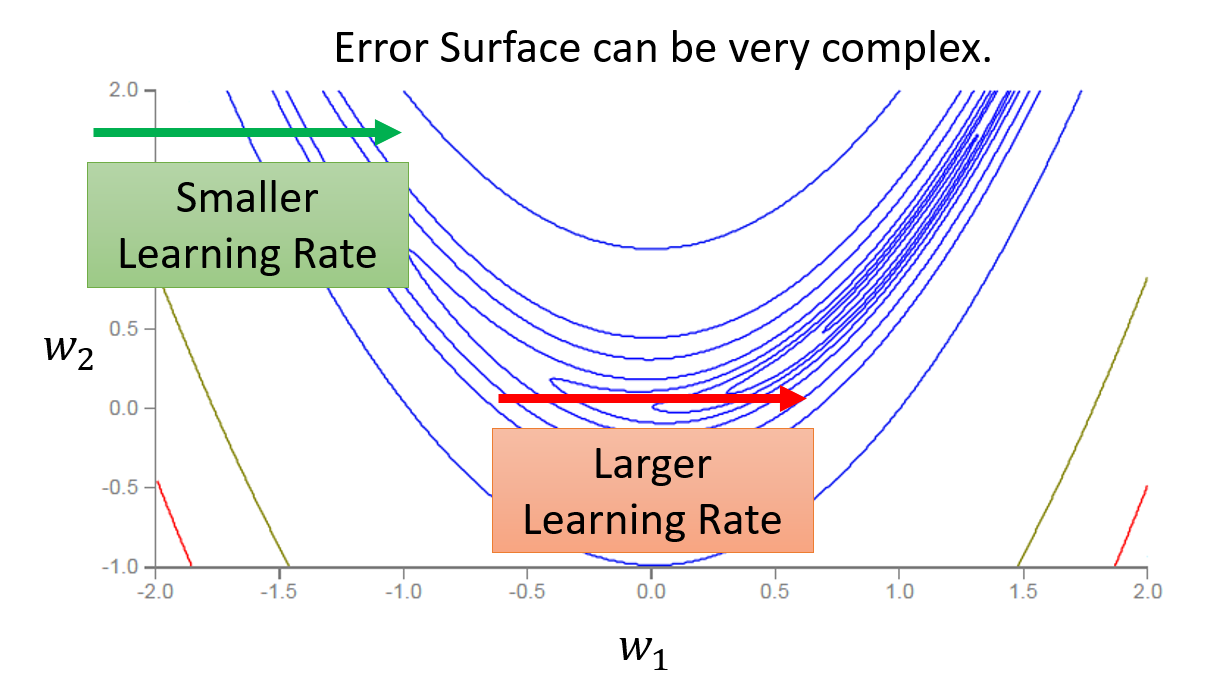
然而,上述方法仍然有缺陷。对于更为复杂的误差曲面,即使是同一个参数,沿同一个方向(梯度)变化时,所经过的误差曲面有平坦的,也有陡峭的。上述方法在这种情况下仍然保持相同的学习速率,而这是不符合我们预期的。
不难发现,Adagrad 在更新参数的时候会不断累积之前的梯度,那么如果在训练开始的时候,梯度就非常大的话,那么 \(\sigma\) 也变得非常大,所以没走几步就走不下去了,影响到训练的效果了。
所以,接下来引入一种更好的优化方法,称为 RMSProp。它的迭代更新公式与 Adagrad 类似,区别在于 \(\sigma_i^t\) 的公式发生了变化:
此时 \(\sigma_i^t\) 的值不仅和当前的梯度有关,还受之前迭代的梯度的影响(可通过展开 \(\sigma_i^t\) 发现
Adam⚓︎
将前面介绍过的动量方法与 RMSProp 结合起来,我们便可以得到一种很常用的优化方法,称为 Adam,其算法实现如下所示:
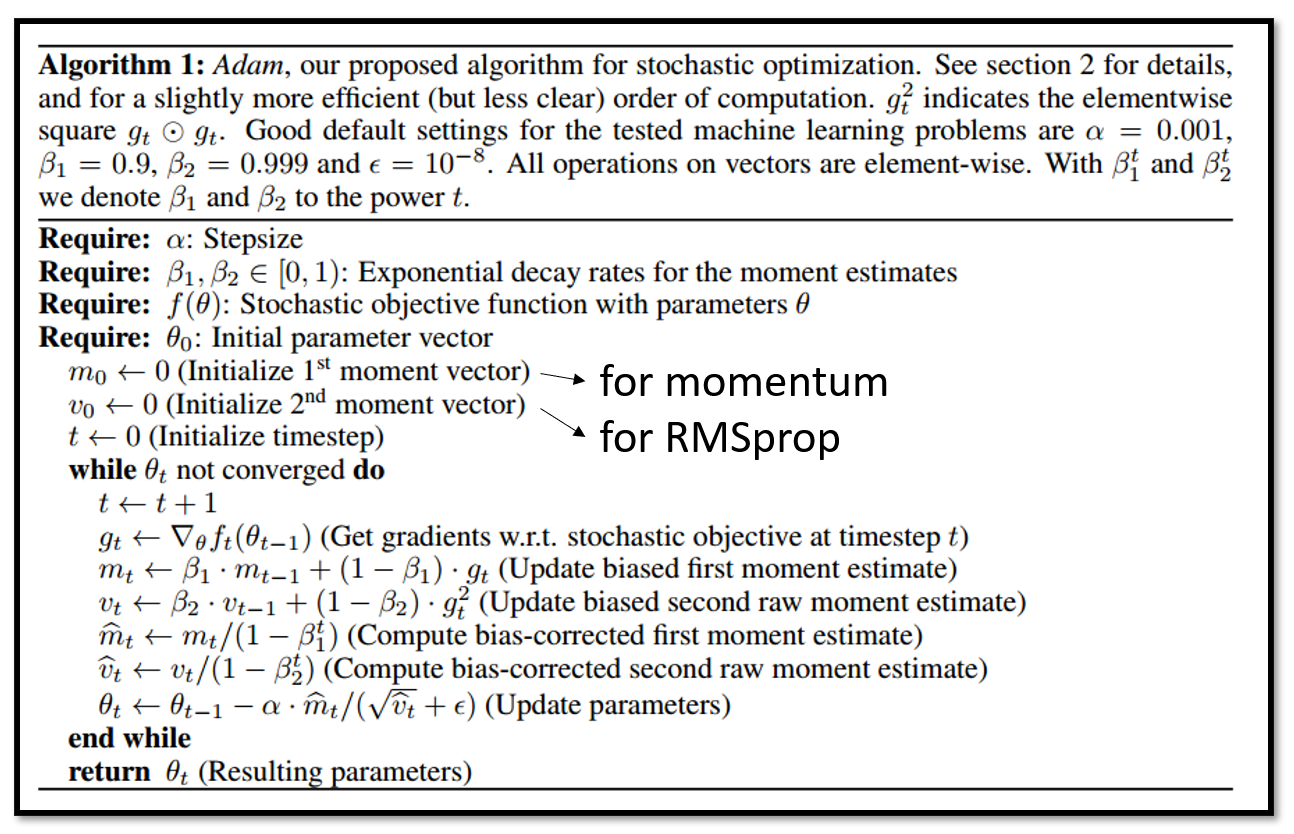
更新公式为:\(\theta_i = \theta_{i-1} - \dfrac{\eta}{\sqrt{\hat{v_t}} + \varepsilon} \hat{m_t}\),其中:
- \(\hat{m_t} = \dfrac{m_t}{1 - \beta_1^t} = \dfrac{\beta_1 m_{t-1} - (1 - \beta_1)g_{t-1}}{1 - \beta_1^t}\)
- 当 \(t\)(迭代次数)比较小的时候,\(\hat{m_t}\) 会比较大,因为初始情况下不会有多少动量,所以需要适当增大,以避免在一开始就陷入关键点的情况出现;随着迭代次数的增加,\(\hat{m_t}\) 会越来越小,趋于稳定
- \(\hat{v_t} = \dfrac{v_t}{1 - \beta_2^t} = \dfrac{\beta_2 v_{t-1} + (1 - \beta_2)(g_{t-1})^2}{1 - \beta_2^t}\)
- 其设置也和 \(\hat{m_t}\) 同理
- \(\beta_1 = 0.9\)
- \(\beta_2 = 0.999\)
- \(\varepsilon = 10^{-8}\)
- 这些常数值是 Adam 的作者提出来的,通常不需要我们调整(
调一下往往会得到更烂的结果)
- 这些常数值是 Adam 的作者提出来的,通常不需要我们调整(
比较 SGDM 和 Adam
- 速度:Adam 更快
- 收敛性:SGDM 的收敛效果更好,而 Adam 可能不收敛
- 稳定性:SGDM 稳定,而 Adam 不稳定
- 泛化障碍:SGDM 的泛化障碍更小
- 适用场景:
- SGDM:CV 领域,包括图像分类、分段 (segmentation)、目标检测 (object detection) 等
- Adam:NLP(问答、机器翻译、总结
) 、语音合成、GAN、强化学习等
Learning Rate Scheduling⚓︎
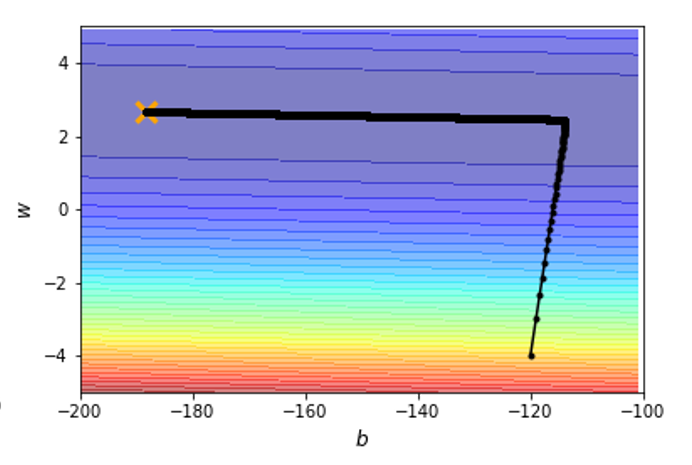
回到前面提到过的凸误差曲面的例子,如果采用 Adagrad 方法的话,结果为:
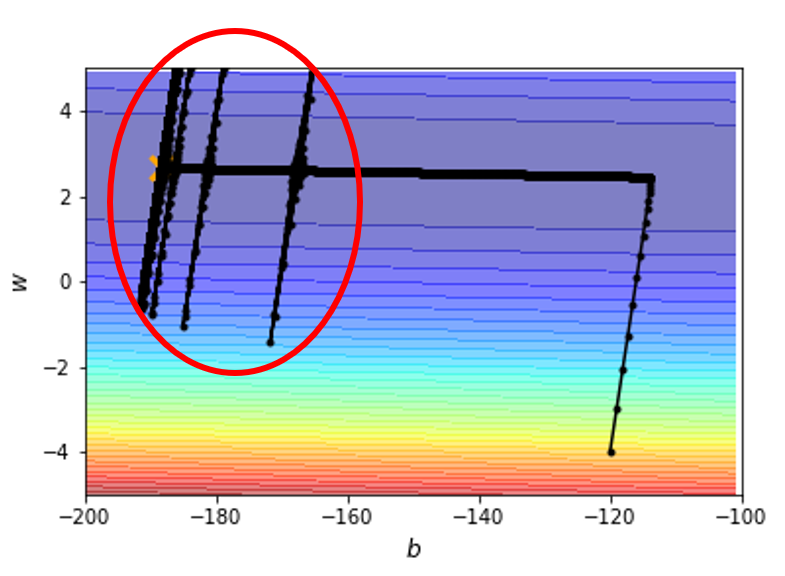
可以看到,使用这种方法可以使模型获得最优的参数,但是在优化过程中会出现红圈所示的一些“爆炸”的情况。这是因为刚开始的时候沿竖直方向的梯度很大,但后来梯度变得很小(来到了平坦的区域
但是该优化方法有办法修正这一偏离,因为当偏出去后,梯度就会变大,那么学习速率就会减小(好比有股“摩擦力”
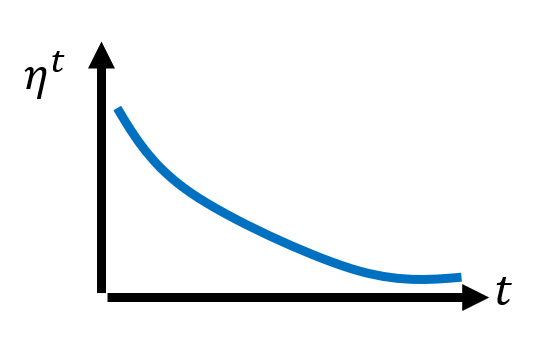
这样的优化并不完美,还有改进的空间,使其不会出现这么多的偏离现象,具体做法是使用一种叫做学习速率调度(learning rate scheduling) 的方法,让学习速率不仅随梯度(空间)变化,还随迭代次数(时间)的变化而变化(下面记第 \(t\) 次迭代的学习速率为 \(\eta^t\)
-
学习速率衰减(learning rate decay):由于随着训练的深入,模型逐渐靠近最合适的参数目标,因此学习速率会随迭代次数的增加而下降,如下图所示:
在上面的凸误差曲面的例子中,采用该方法后的优化过程为:
现在的优化过程变得非常“丝滑”了 ~
-
热身(warm up):随着迭代次数的增加,学习速率先增后减
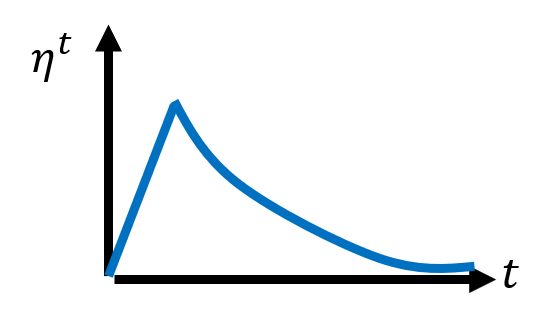
之所以这样设定,是因为在训练刚开始的时候,还不清楚具体的误差曲面应该长什么样子,此时得到的 \(\sigma_i^t\) 就有可能偏离过大,因而需要更小的学习速率以降低影响。而随着训练的进行,会逐渐摸清楚误差曲面大致的样子,因此学习速率会逐渐上升。
- 残差神经网络和 Transformer 都提到了这种方法
- RAdam -> Adam + 热身
总结
结合前面提到的各种改进优化的技巧,可以得到以下式子:
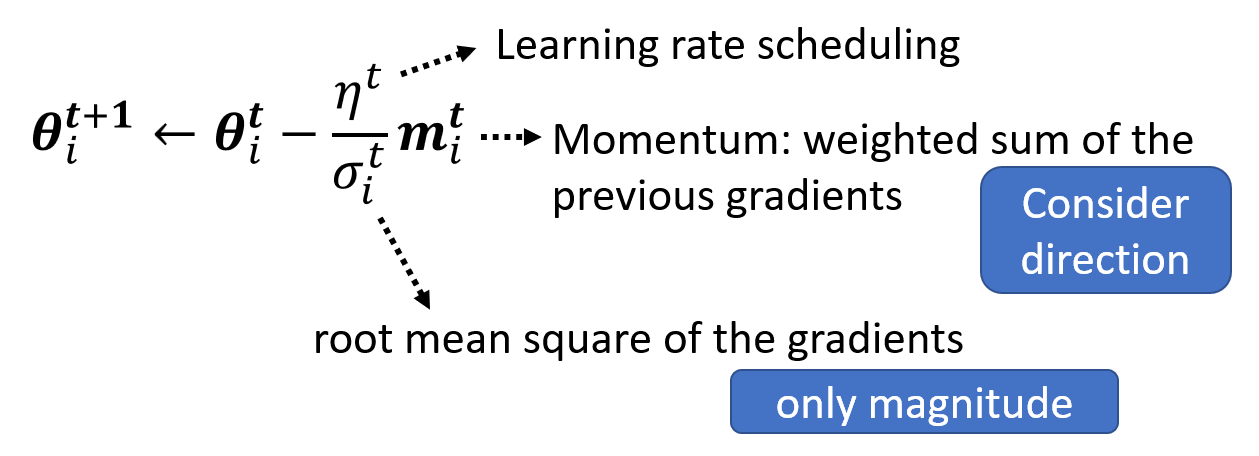
\(\sigma_i^t\) 和 \(\bm{m}_i^t\) 都与前面的梯度有关,但是一个在分母,一个在分子上。然而这并不意味着两者的效果会相互抵消,因为前者是标量,只影响学习速率的大小;而后者是向量,需要考虑方向,因此两者无法完全抵消。
Other Optimizer⚓︎
现在的优化器大多数可以分为 SGD 和 Adam 两大阵营:
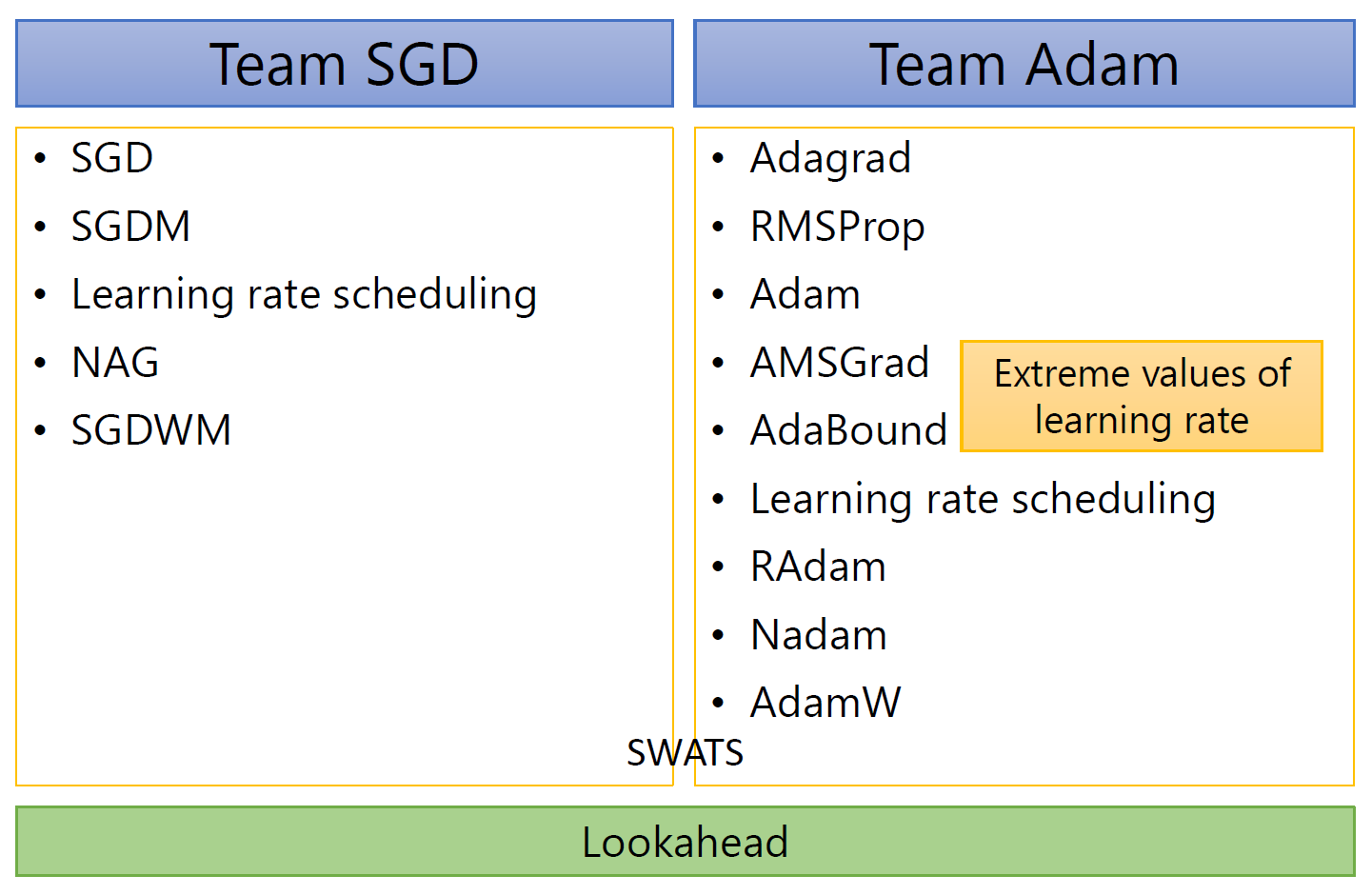
- SWATS 同时利用了 SGD 和 Adam
- Lookahead 是一个对所有优化器都适用的包装器 (wrapper),大致思路是每向前走 k 步就向后退 1 步,这样的好处是更稳定,且具备更好的泛化能力
遗憾的是,世界上没有一种通用的优化器,还需后人不断地探索出更棒的优化器!
Classfication⚓︎
前面介绍的机器学习研究的都是回归(regression) 问题,即模型根据输入数据集,输出单个标量 \(y\),并于真实值(标签)\(\hat{y}\) 比较。现在我们来探讨分类(classification) 问题,它与回归的不同在于:模型会从多个选项(称为类别 (classes))中挑选一个作为输出。
那我们是否可以将分类问题转化为回归问题呢?因为输出的都是单个量,那么也许可以尝试用单个标量表示挑选出来的类别;并且规定每个选项都用一个数值表示,便于将输出 \(y\) 与标签 \(\hat{y}\) 比较。然而,这样会带来一个明显的问题:类别之间的关系可不像数值之间的大小这么直接,也许类别之间的关系很复杂,也许压根没有关系,那么 \(\hat{y} - y\) 也就无法准确表示输出类别与真实类别之间的关系,所以这不是一个好方法。
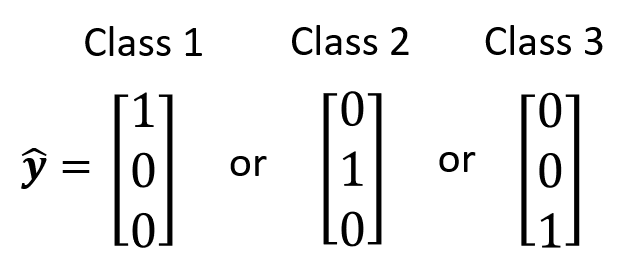
实际上,我们采用独热向量(one-hot vector) 来表示每个类别。独热向量的特点是:向量里面的元素只有 0 和 1,而且只有其中一位是 1,其余位均为 0。对于任意两个不同类别的独热向量,它们值为 1 的元素是不同的。这种方法的好处在于:任意不同两个类别之间的区别是一致的,因为它们对应的独热向量之间的距离是一样的,这样便于输出类别与真实类别的比较。
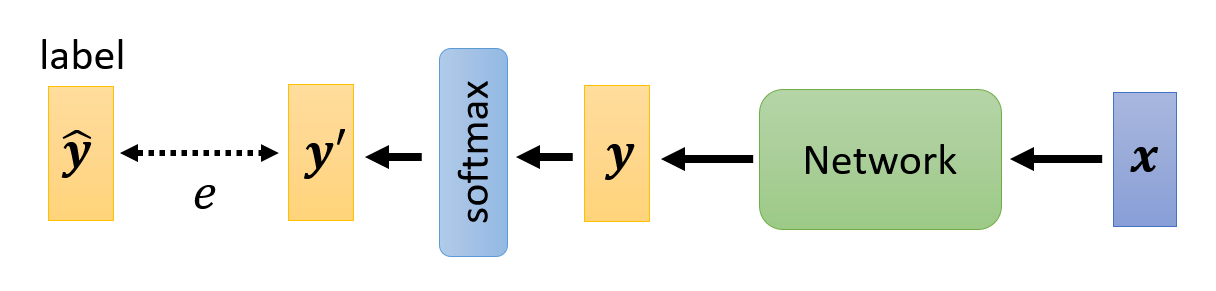
因为向量里面包含多个标量,那么模型就要从输出单个值转变为输出多个值,因此需要稍微改变一下模型的样子,如下所示:
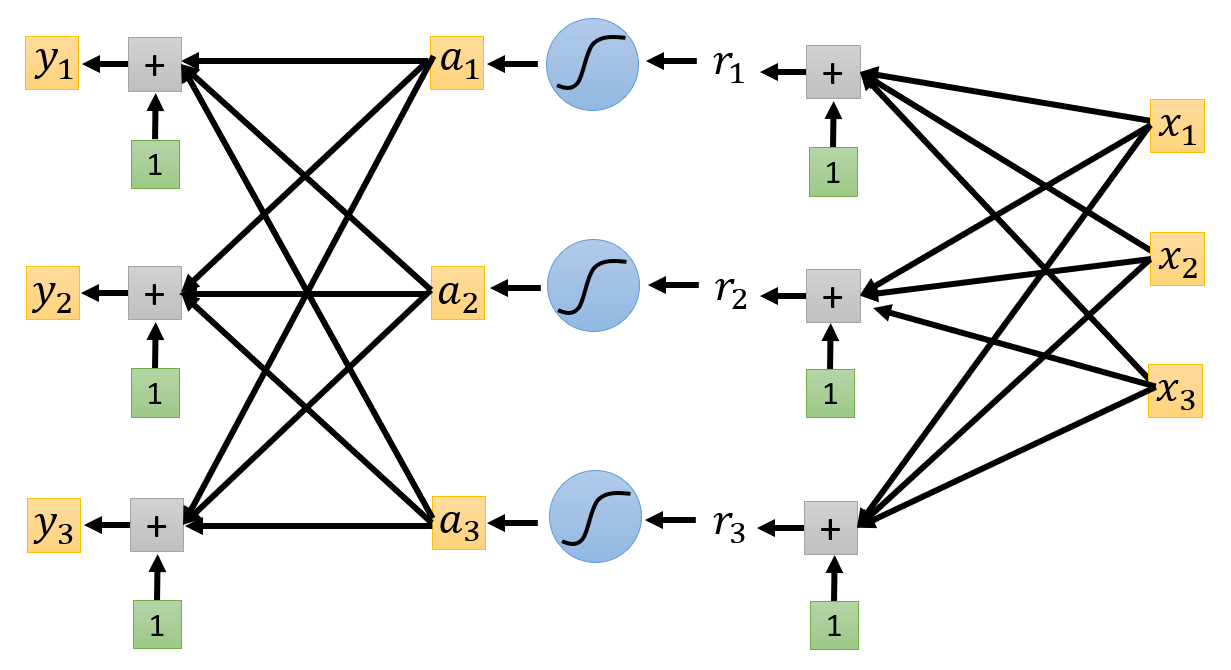
重点关注输出部分的改变。以上图为例,现在的输出由 \(y_1, y_2, y_3\) 三部分构成,每个输出都有各自不同的权重和偏移,但接收的都是来自激活函数的输出。
现在来比对一下回归和分类两类问题对应的模型(方程
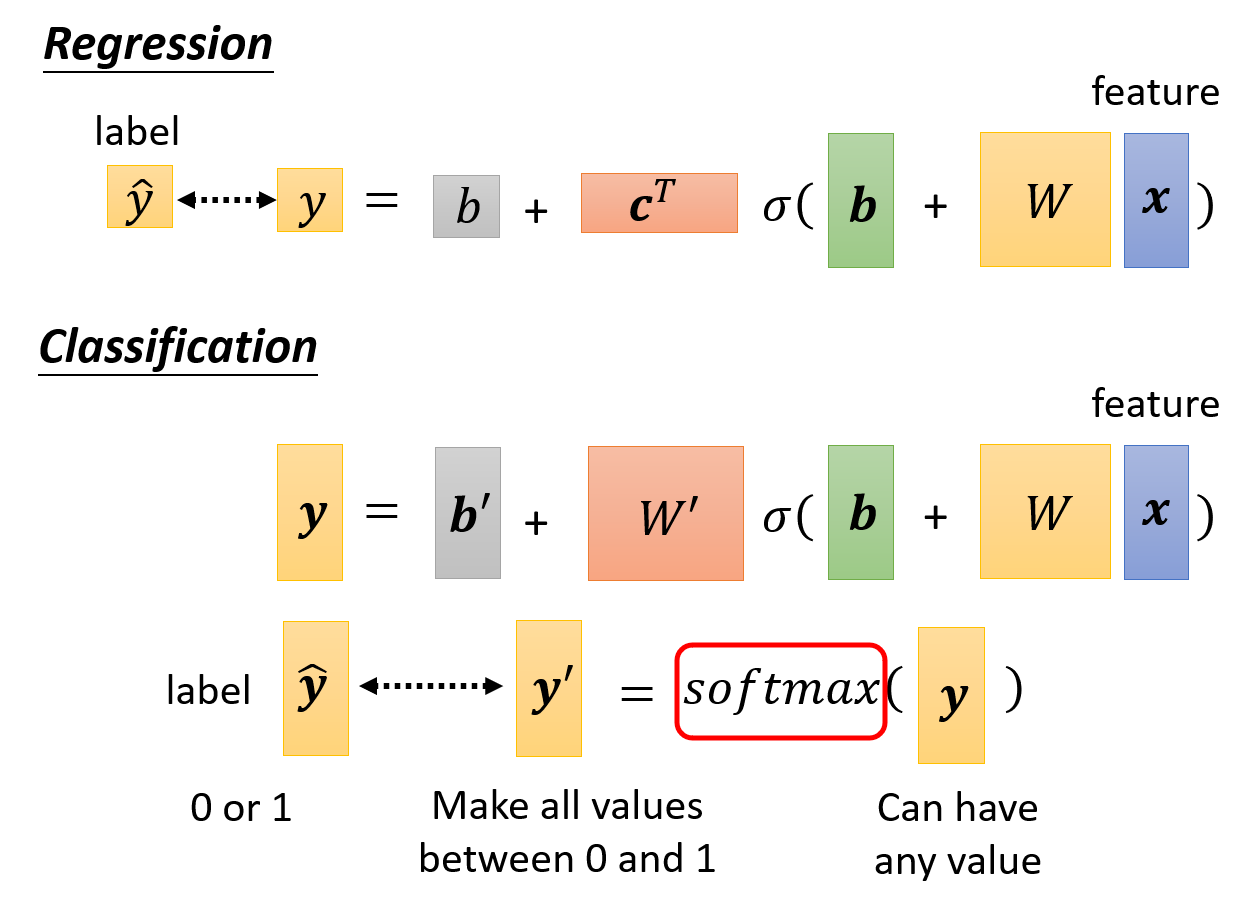
相比回归模型,分类模型有一些小变化:
- 由于输出量从标量变为向量,因此对应地,权重从向量 \(\bm{c}^T\) 变为矩阵 \(W'\),偏移从标量 \(b\) 变成向量 \(\bm{b}'\)
- 最后,还要将模型的输出值放到 softmax 函数做进一步的转化。这是因为通过模型得到的输出量可以是任意值,而我们要求的输出量中每个元素只能是 0 和 1。而 softmax 就帮我们做了这步转化,它能将任何值映射到 0 或 1 上
Softmax⚓︎
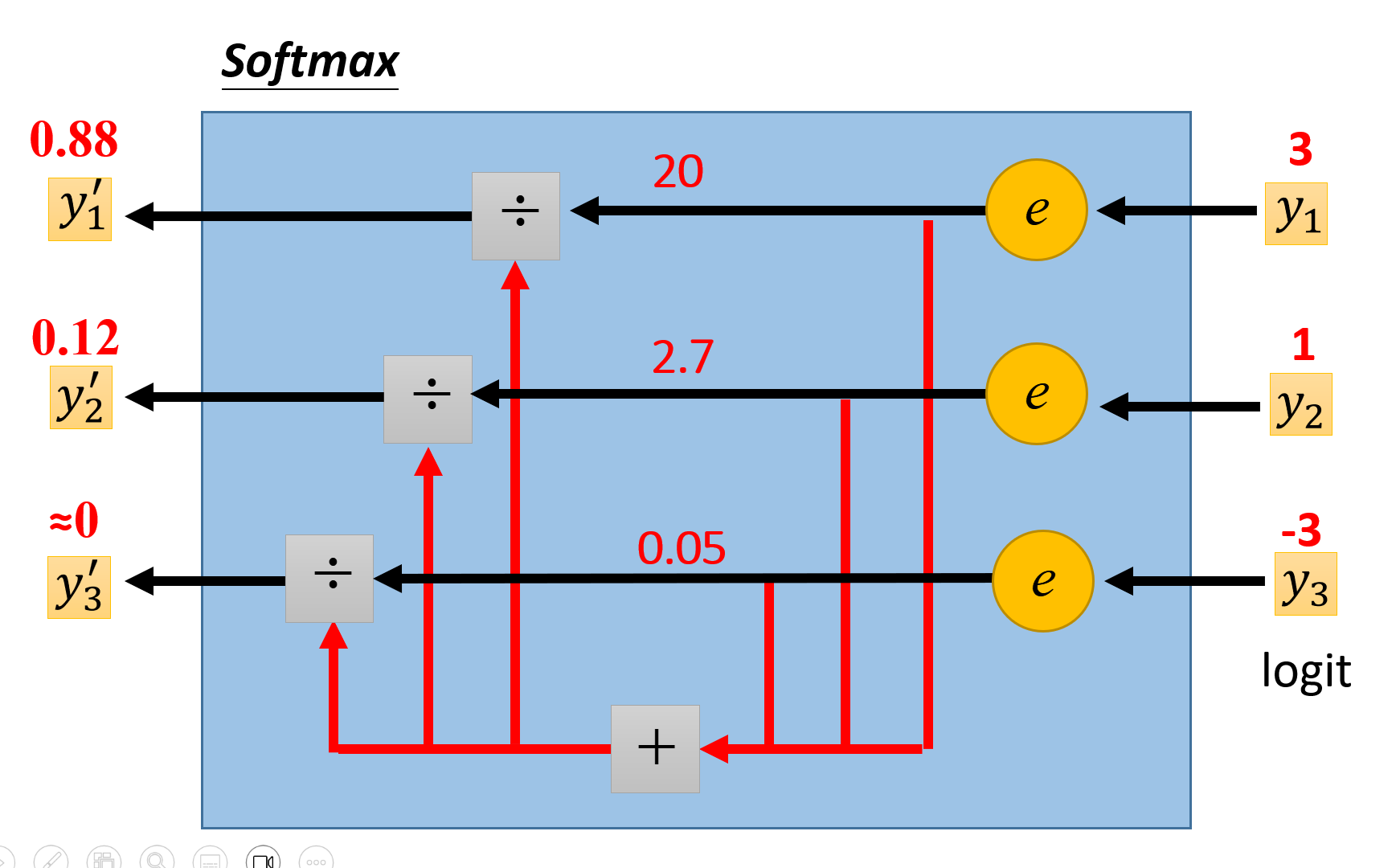
下面大致介绍一下 softmax 函数的原理。假设原始的输出向量中包含 \(y_1, y_2, y_3\) 三个元素,它们在 softmax 函数的输出分别为 \(y_1', y_2', y_3'\),那么 softmax 的计算公式为:
下图形象展示了这一过程:
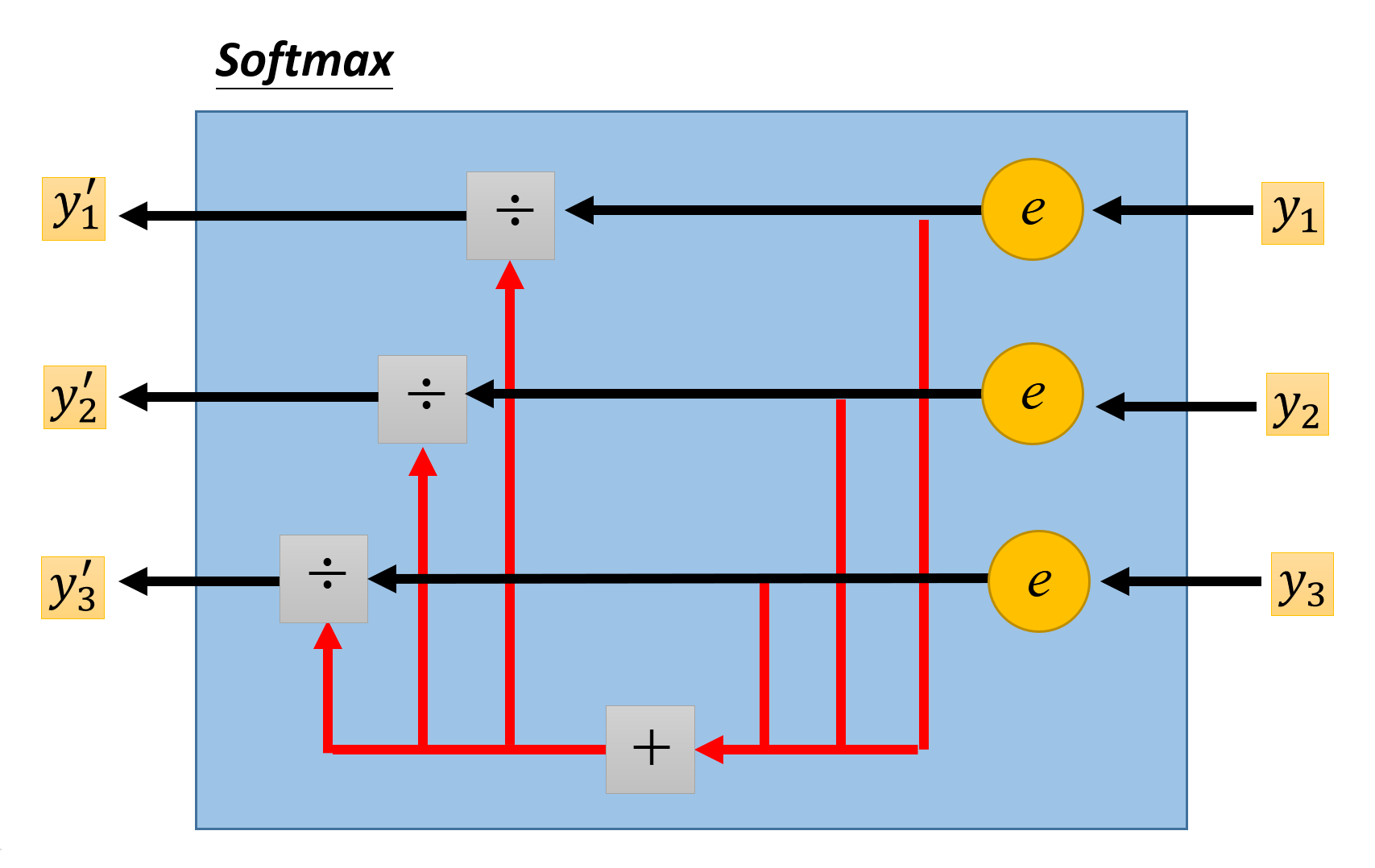
\(y_i'\) 还有以下性质:
- \(y_i' \in (0, 1)\)
- \(\sum_i y_i' = 1\)
- 对于原始输出向量中的两个元素,它们之间的差距大小也能在对应的 softmax 结果中体现出来
例子
实际上,如果只有两个类别的话,sigmoid 函数与 softmax 函数是等价的,但在这种情况下 sigmoid 函数会用的更多一些(虽然两者并没有孰优孰劣
Loss⚓︎
完善好我们的分类模型的输出后,现在来考虑如何计算损失。
- 损失 \(L\) 还是可以用误差的均值计算
-
误差 \(e\) 也可以继续沿用回归模型中的 MSE,即 \(e = \sum\limits_i (\hat{\bm{y}}_i - \bm{y}_i')^2\)。然而,在分类模型中,更好的误差计算方法是交叉熵(cross-entropy),即 \(e = -\sum\limits_i \hat{\bm{y}}_i \ln \bm{y}_i'\)。虽然两者都能正确反映误差的大小,但是交叉熵更适用于分类模型的优化过程。下面通过一个例子来解释原因(严谨的数学推导过程见过去的视频
) :例子
给定以下分类模型:
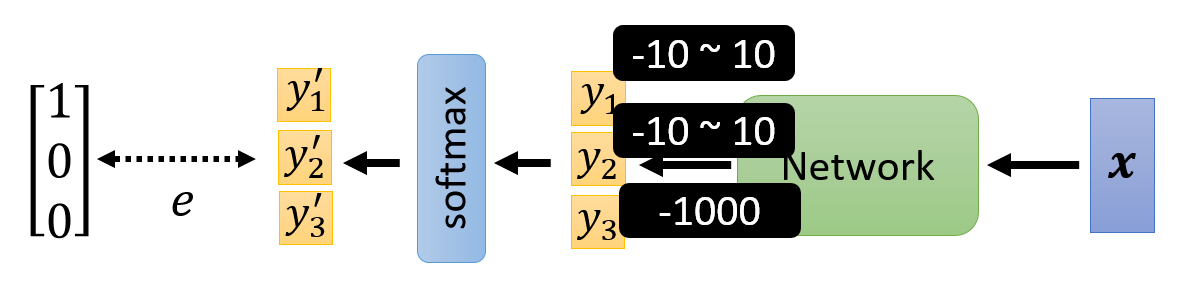
- 方便起见,规定输出量的范围为:\(y_1, y_2 \in [-10, 10]\),\(y_3 = -1000\)(很小的常量,通过 softmax 后就接近于 0)
- 标签为 \(\begin{bmatrix}1 \\ 0 \\ 0\end{bmatrix}\)
现在来比较通过 MSE 和交叉熵得到的误差曲面:
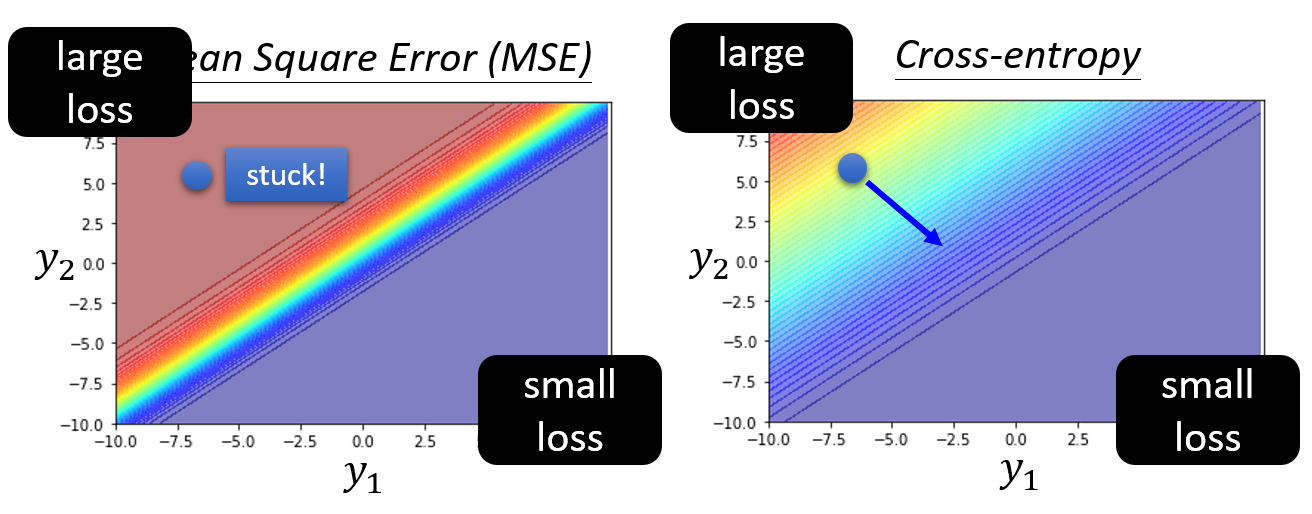
可以看到:
- 当 \(y_1\) 很大,\(y_2\) 很小的时候,两者得到的损失都很小;当 \(y_1\) 很小,\(y_2\) 很大的时候,两者得到的损失都很大
- 然而,如果初始参数位于图上蓝点所示位置,并且使用一般的梯度下降法(即学习速率不变)的话,由于 MSE 的误差曲面过于平坦,即梯度很小,因此就会卡在原地不走了;而交叉熵的误差曲面较为陡峭,即有一定的梯度,因此可以继续走下去
所以在分类模型中,交叉熵的计算方法更适用于优化过程。
注
- 最小化交叉熵 == 最大化可能性 (likelihood)
- 改变损失函数也许就能降低优化的难度
Example: Pokémon/Digimon Classifier⚓︎
下面将以宝可梦 / 数码宝贝分类器为例,加深对机器学习原理的认识,同时也会学习到模型复杂度(model complexity) 对训练的影响。
Function with Unknown Parameters⚓︎
回顾一下训练的过程——第一步是基于我们的领域知识,去找一个带有未知参数的函数。这个函数大致长这样:
现在从宝可梦和数码宝贝中进行随机采样,观察它们的特征:

比对两者的画风,不难发现数码宝贝的线条较为复杂,而宝可梦的线条更为简单。为了验证这一发现的正确性,可以用一些图像处理工具来提取这些图片的线条:
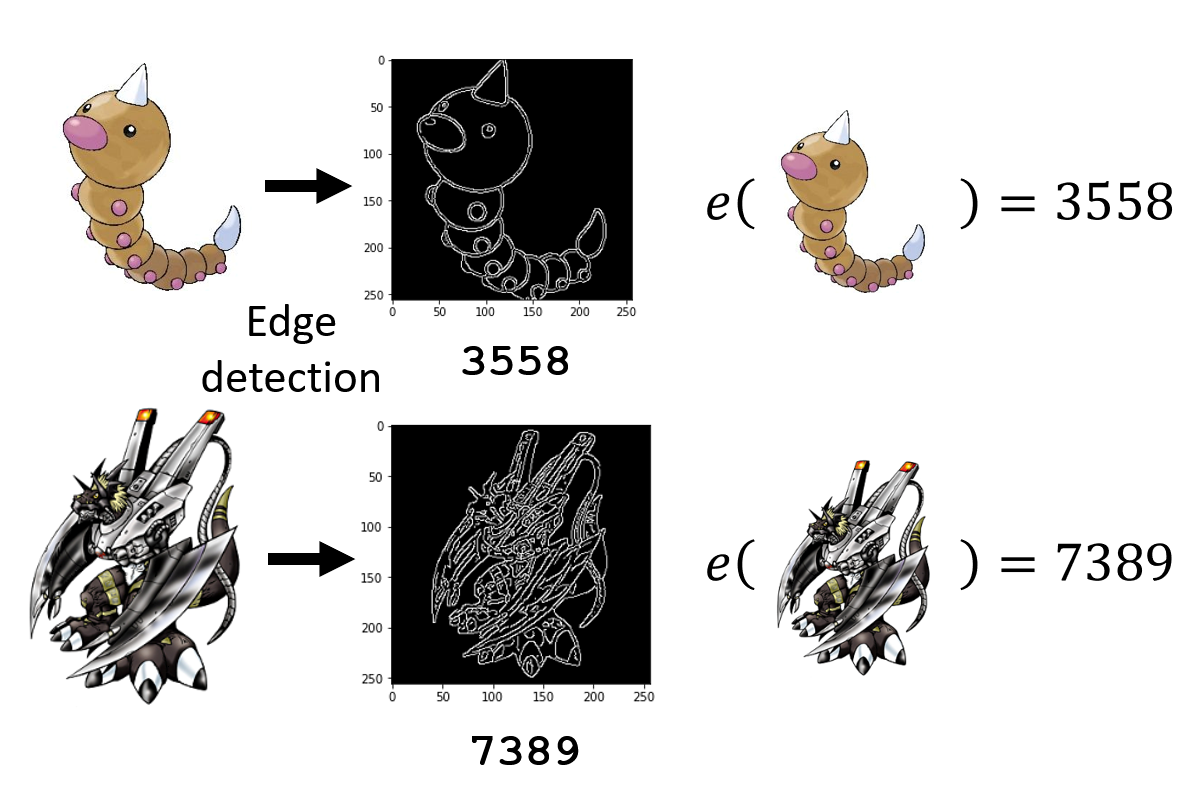
使用边缘检测工具后,可以得到中间的图片,其中白色的像素表示精灵的线条。很明显,上面的宝可梦的线条比下面的数码宝贝的线条少得多。根据这一发现,我们可以确定大致的函数形式为:
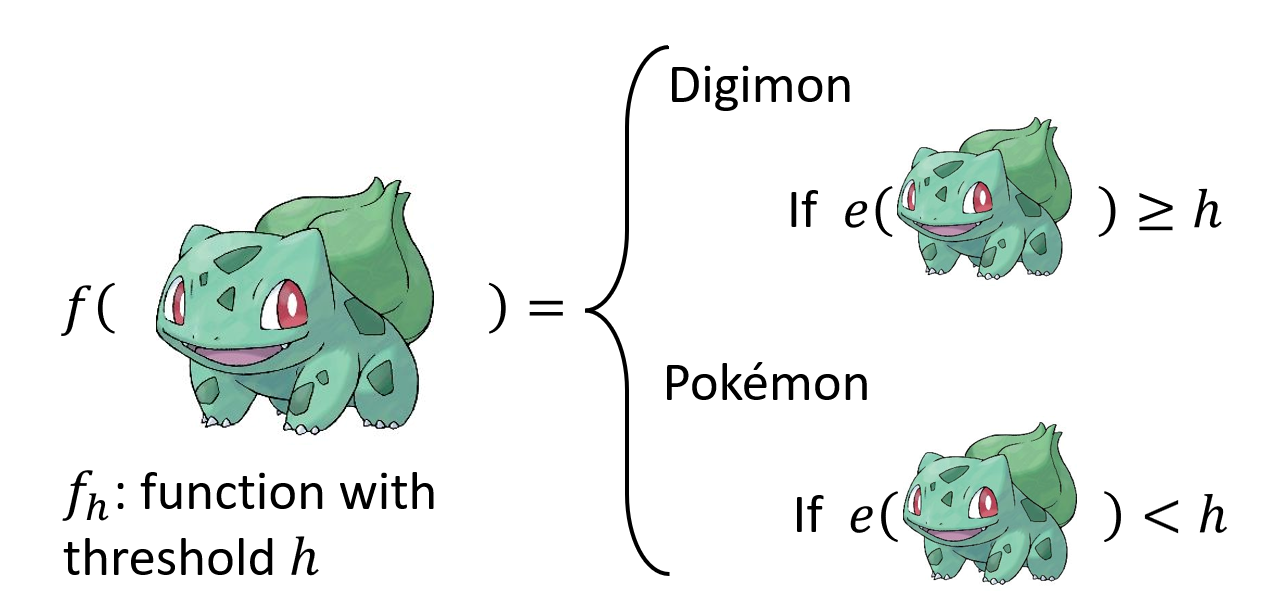
- 函数用 \(f_h\) 表示,其中 \(h\) 是一个阈值,作为划分宝可梦和数码宝贝的依据:当超过该阈值时,说明该图像表示的是数码宝贝,否则的话就是宝可梦
- 并且假定阈值的取值范围为 \(H = \{1, 2, \dots, 10000\}\)(图片最多有 10000 个像素点
) ,因此 \(|H|\) 可以表示候选函数的个数,即模型的“复杂度”(model "complexity")
- 并且假定阈值的取值范围为 \(H = \{1, 2, \dots, 10000\}\)(图片最多有 10000 个像素点
- 另外用函数 \(e\) 表示边缘检测工具计算得到的线条像素数
Loss of a Function⚓︎
接下来进入训练的第二步:对于给定的数据,定义一个损失函数。
- 假如给定一个数据集 \(D = \{(x^1, \hat{y}^1), (x^2, \hat{y}^2), \dots, (x^N, \hat{y}^N)\}\),其中 \(x^n\) 表示输入的图片,\(y^n\) 表示输出的宝可梦 / 数码宝贝的选项
-
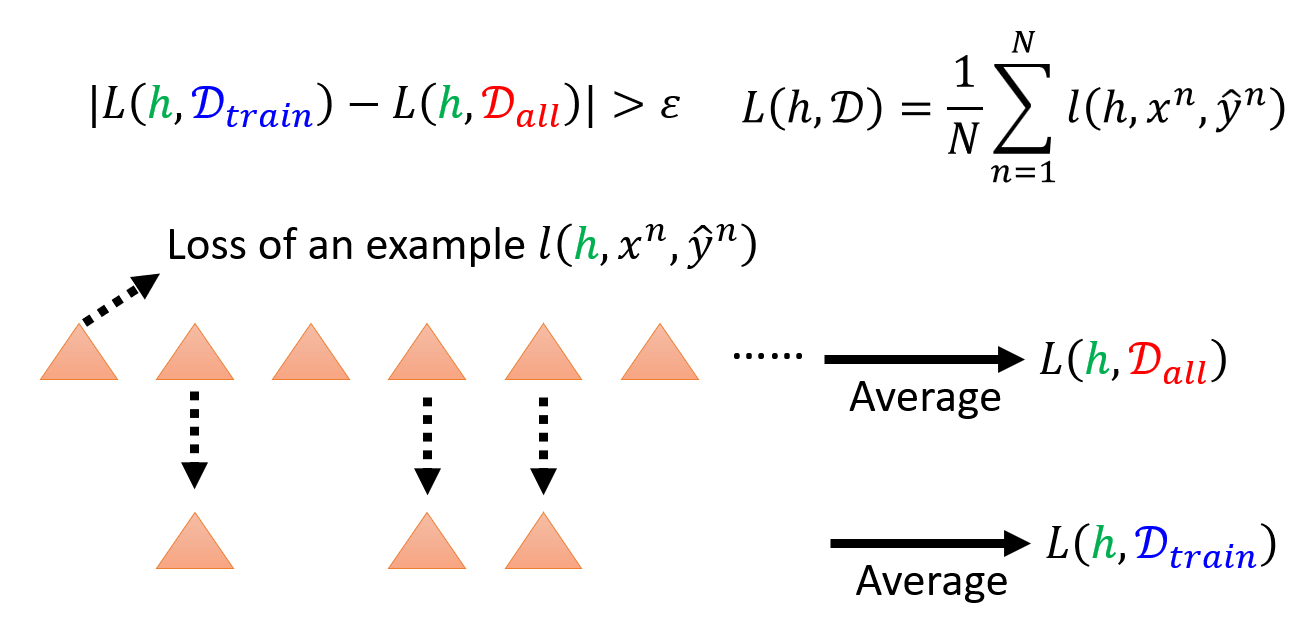
此时损失函数是一个关于阈值 \(h\) 和数据集 \(D\) 的函数,即:
\[ L(h, D) = \dfrac{1}{N} \sum\limits_{n=1}^N l(h, x^n, \hat{y}^n) \]- 每个数据的损失(或者说误差)可以用一个简单的函数计算:\(I(f_h(x^n) \ne \hat{y}^n) = \begin{cases}1 & \text{If } f_h(x^n) \ne \hat{y}^n \\ 0 & \text{Otherwise}\end{cases}\)
- 那么损失函数的取值范围为 \([0, 1]\),因此这里的损失函数又称为错误率(error rate)
- 当然,由于这是一个分类问题,所以也可以用交叉熵来计算误差。但为了方便后续的解释,而且这是一个二项分类问题,所以后面还是按照这里定义的误差函数来分析
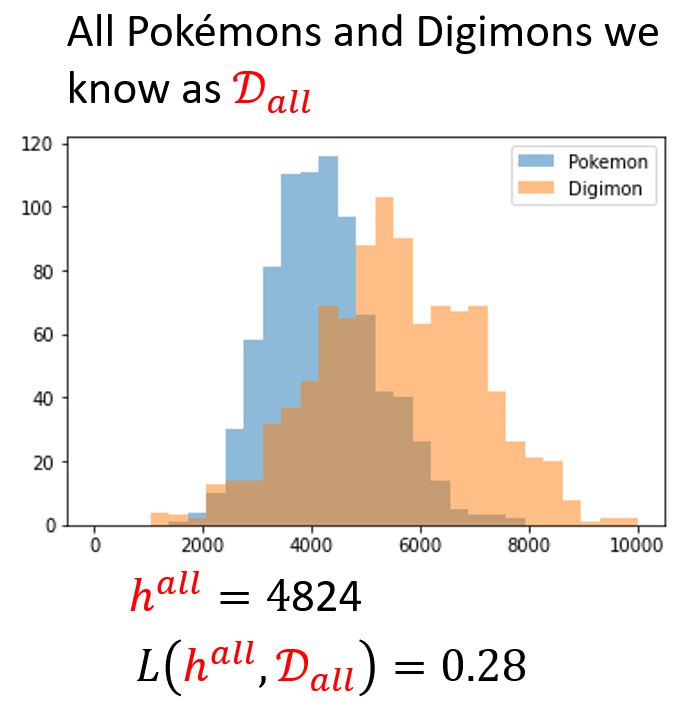
如果我们能够收集世界上所有的宝可梦和数码宝贝,由此构建了一个数据集 \(\textcolor{red}{D_{all}}\),那么就能从中找出最佳的阈值 \(\textcolor{red}{h^{all}}\),即 \(\textcolor{red}{h^{all}} = arg \min\limits_h L(h, \textcolor{red}{D_{all}})\)。然而,事实上我们只能从 \(\textcolor{red}{D_{all}}\) 中收集部分的例子 \(\textcolor{cornflowerblue}{D_{train}} = \{(x^1, \hat{y}^1), (x^2, \hat{y}^2), \dots, (x^N, \hat{y}^N)\}\),其中 \(\{x^n, \hat{y}^n\} \sim \textcolor{red}{D_{all}}\) 是独立同分布的 (i.i.d.);而从 \(\textcolor{cornflowerblue}{D_{train}}\) 上得到阈值为 \(\textcolor{cornflowerblue}{h^{train}} = arg \min\limits_{h} L(h, \textcolor{cornflowerblue}{D_{train}})\)。
所以,\(\textcolor{red}{h^{all}}\) 只是我们的理想,但现实是我们只能通过机器学习得到 \(\textcolor{cornflowerblue}{h^{train}}\)(理想很丰满,现实很骨感(悲)
例子
假设我们收集到了世界上所有的宝可梦和数码宝贝。下面给出了相应的数据分布图,并计算了最佳阈值及其损失:
注意
要清楚实际上是不可能获得所有数据的,这里只是一个假设。在现实中,一般会用测试数据 \(D_{test}\) 作为 \(D_{all}\) 的代表,因为 \(D_{test}\) 可以反映 \(D_{all}\) 的数据特征。
现在随机采样得到 200 只宝可梦和数码宝贝,得到以下数据分布图,并计算了最佳阈值及其损失:
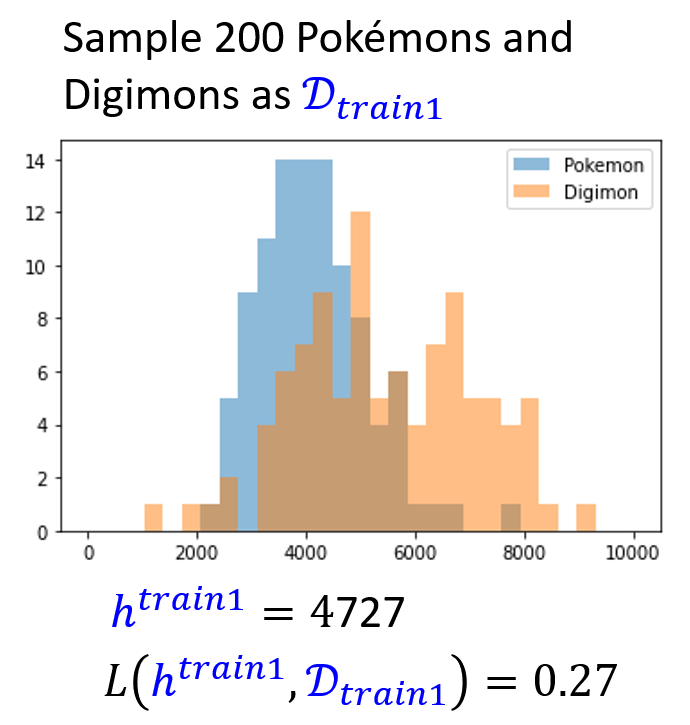
思考
诶,怎么 \(L(\textcolor{cornflowerblue}{h^{train1}}, \textcolor{cornflowerblue}{D_{train1}})\) 比 \(L(\textcolor{red}{h^{all}}, \textcolor{red}{D_{all}})\) 还要低呢?事实上,这样的比较是没有意义的,因为这两个损失值是根据不同的数据集计算得到的,两者没有可比性。
我们应该关注的是 \(L(\textcolor{cornflowerblue}{h^{train1}}, \textcolor{red}{D_{all}})\) 的值。在这个例子中,其值为 0.28,与 \(L(\textcolor{red}{h^{all}}, \textcolor{red}{D_{all}})\) 一致,这说明了“现实与理想”近乎一样 ~
然而,这只是最理想的情况,后面的“现实”可没有这么“理想”!
现在另外随机采样得到 200 只宝可梦和数码宝贝,得到以下数据分布图,并计算了最佳阈值及其损失:
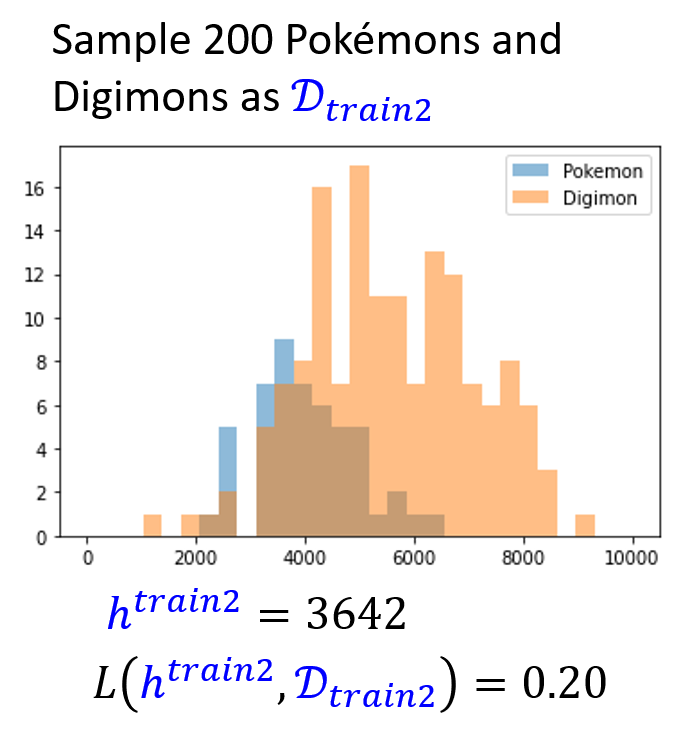
通过前面的分析,我们知道即使 \(L(\textcolor{cornflowerblue}{h^{train2}}, \textcolor{cornflowerblue}{D_{train2}})\) 再小也无济于事,效果好不好还得看 \(L(\textcolor{cornflowerblue}{h^{train2}}, \textcolor{red}{D_{all}})\)——其结果为 0.37,比 \(L(\textcolor{red}{h^{all}}, \textcolor{red}{D_{all}})\) 大好多,这说明了本次训练的效果比较糟糕。
下面从定量的角度分析训练的目标——我们希望 \(L(\textcolor{cornflowerblue}{h^{train}}, \textcolor{red}{D_{all}}) - L(\textcolor{red}{h^{all}}, \textcolor{red}{D_{all}}) \le \delta\),其中 \(\delta\) 是我们人为设定的范围——如果希望理想和现实很接近,那么就调小这个值。接下来就要考虑什么样的 \(\textcolor{cornflowerblue}{D_{train}}\) 能够满足这一不等式的要求呢?这里直接给出结论:
当这一不等式满足时,我们希望的不等式条件就能成立。此时在对任意 \(\textcolor{green}{h}\) 求解损失 \(L\) 时,这个 \(\textcolor{cornflowerblue}{D_{train}}\) 是 \(\textcolor{red}{D_{all}}\) 的一个不错的代表。
证明
更一般地,我们希望采样得到一个好的数据集 \(\textcolor{cornflowerblue}{D_{train}}\),满足:
那么我们便想知道采样到一个坏的数据集 \(\textcolor{cornflowerblue}{D_{train}}\) 的概率是多少,下面就来讨论这一问题
Probability of Failure⚓︎
注
下面的讨论不局限于特定的模型、特定的数据分布和特定的损失函数,我们讨论的是很一般的情况。
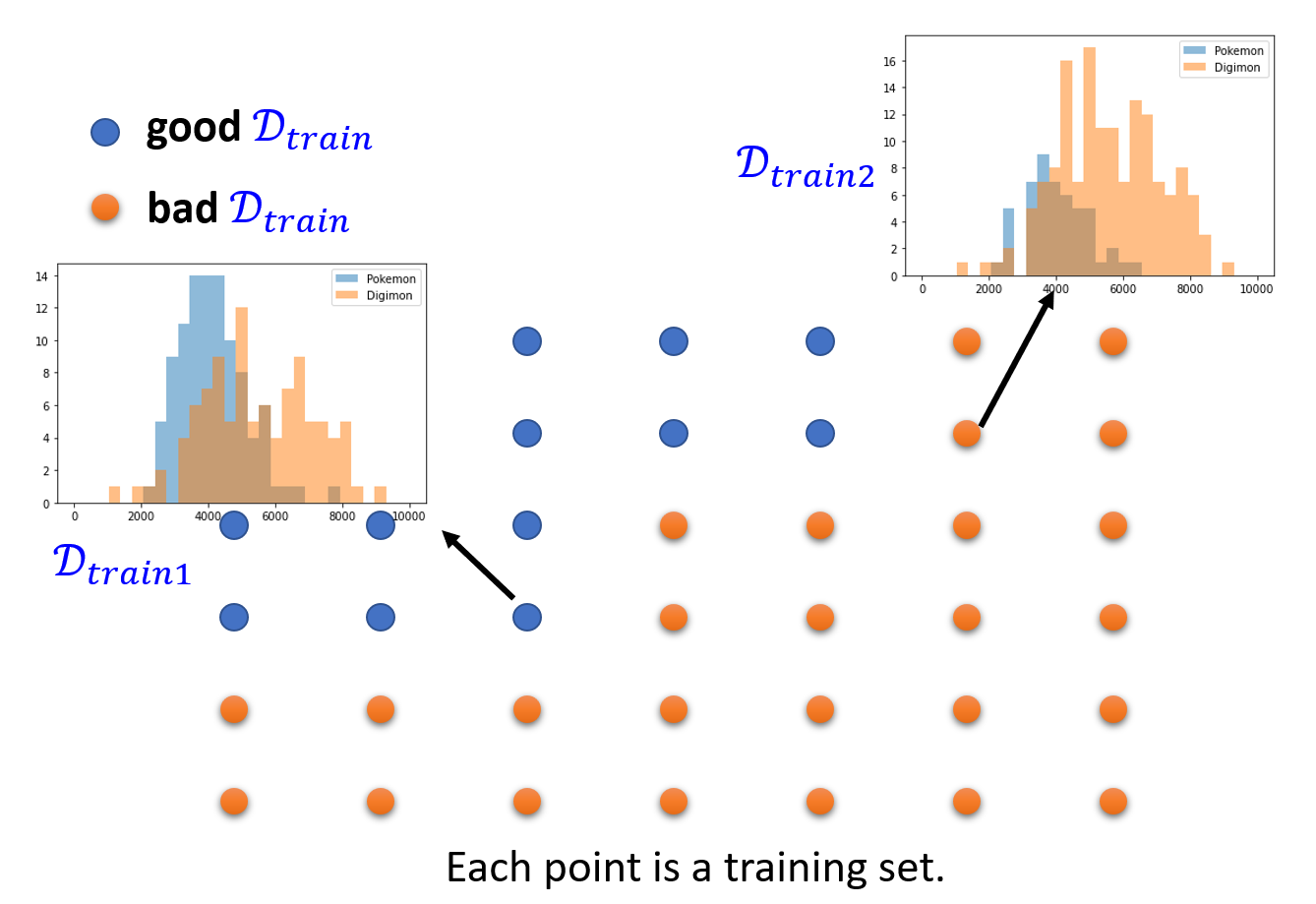
假设我们随机采样多次,得到多组如下所示的训练数据集。其中用蓝色的点表示好的数据集,黄色的点表示坏的数据集。那么黄色点的数量占所有点的数量就是采样到坏的数据集的概率 \(P(\textcolor{cornflowerblue}{D_{train}}\ is\ \bm{bad})\)。
如果 \(\textcolor{cornflowerblue}{D_{train}}\) 是坏的话,那么至少有一个阈值 \(\textcolor{green}{h}\),使得 \(\forall \textcolor{green}{h} \in H, |L(\textcolor{green}{h}, \textcolor{cornflowerblue}{D_{train}}) - L(\textcolor{green}{h}, \textcolor{red}{D_{all}})| > \varepsilon\)。下图展示了其中一种可能的情况:
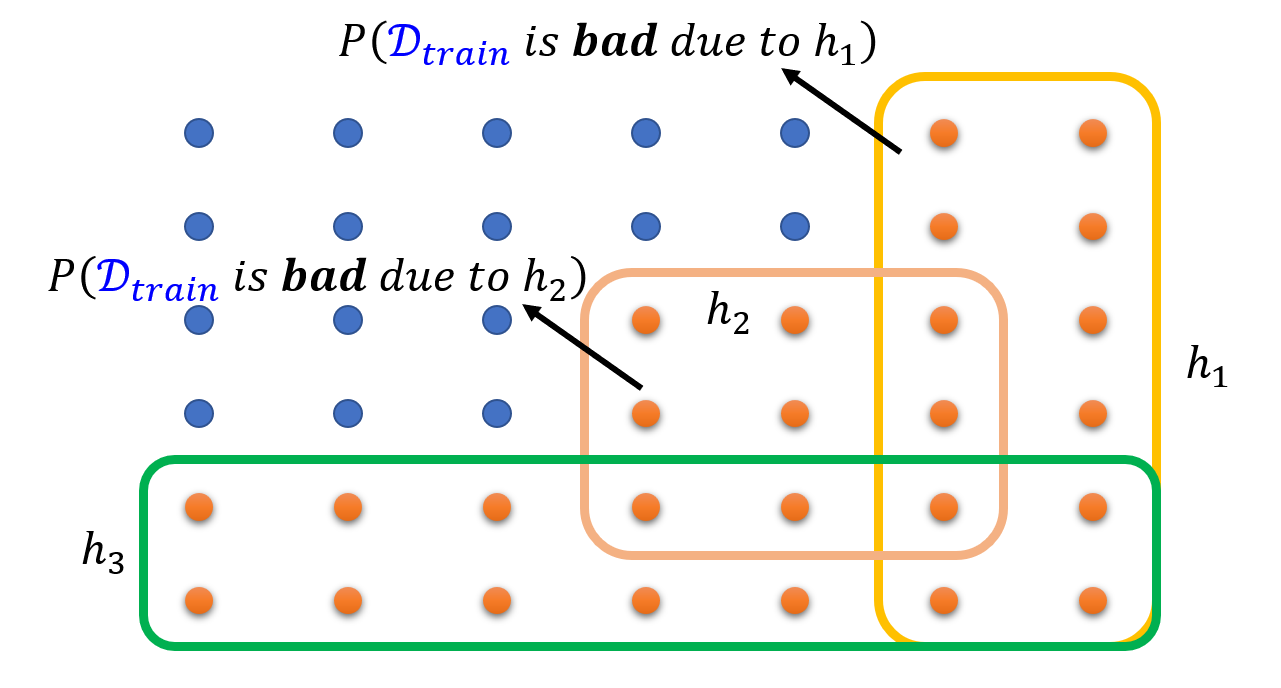
用数学语言描述为:
- 为了计算方便,我们将集合的并运算转化为求和公式。这一放缩比较大胆,因为求和的结果很可能超过 1,但为了后续讲解的方便,所以就不再深究这个问题了
-
下面用数学公式和一些图形来回顾何为“\(\textcolor{cornflowerblue}{D_{train}}\ is\ \bm{bad}\ due\ to\ \textcolor{green}{h}\)”
-
用霍夫丁不等式计算这个概率值:
\[ P(\textcolor{cornflowerblue}{D_{train}}\ is\ \bm{bad}\ due\ to\ \textcolor{green}{h}) \le 2exp(-2N \varepsilon^2) \]- 该不等式要求损失值 \(L \in [0, 1]\)
- \(N\) 表示 \(\textcolor{cornflowerblue}{D_{train}}\) 中的样例数
继续化简式子:
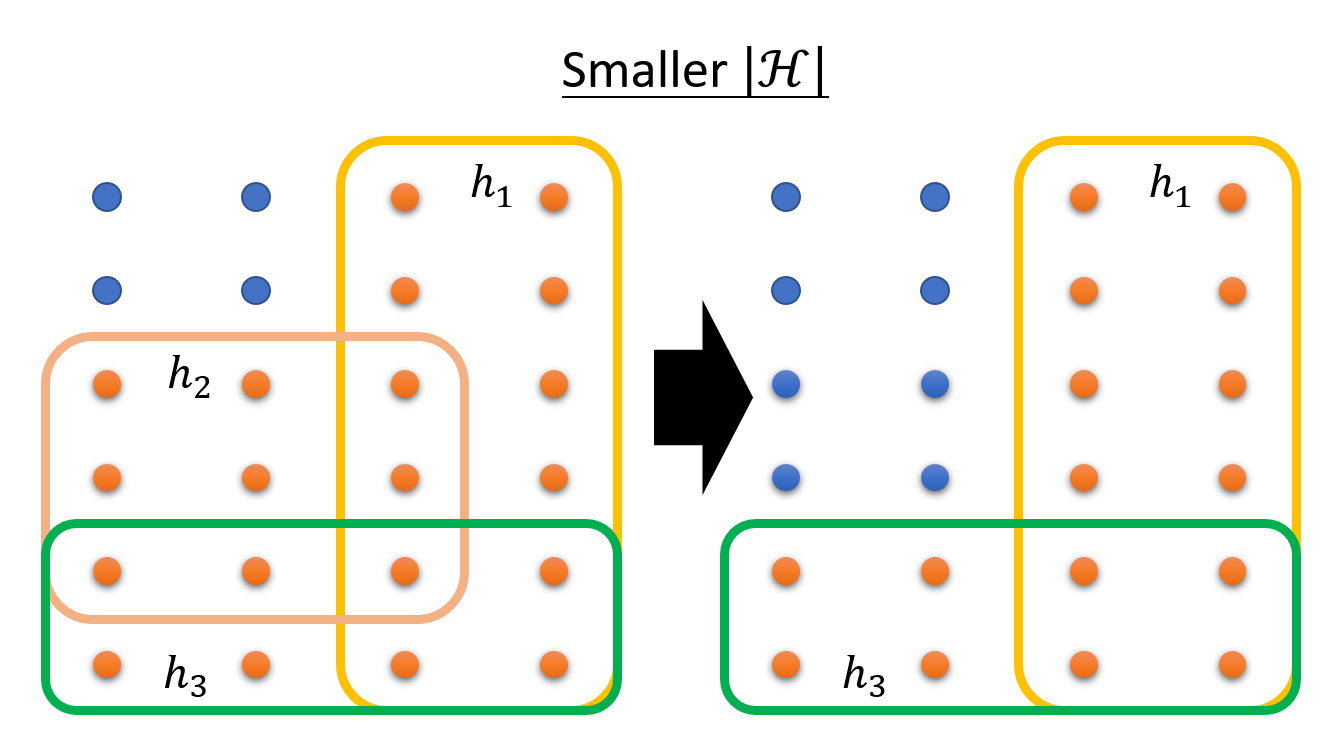
很明显,要想减小概率 \(P(\textcolor{cornflowerblue}{D_{train}}\ is\ \bm{bad})\),可以做的调整有:
-
增大 \(N\)
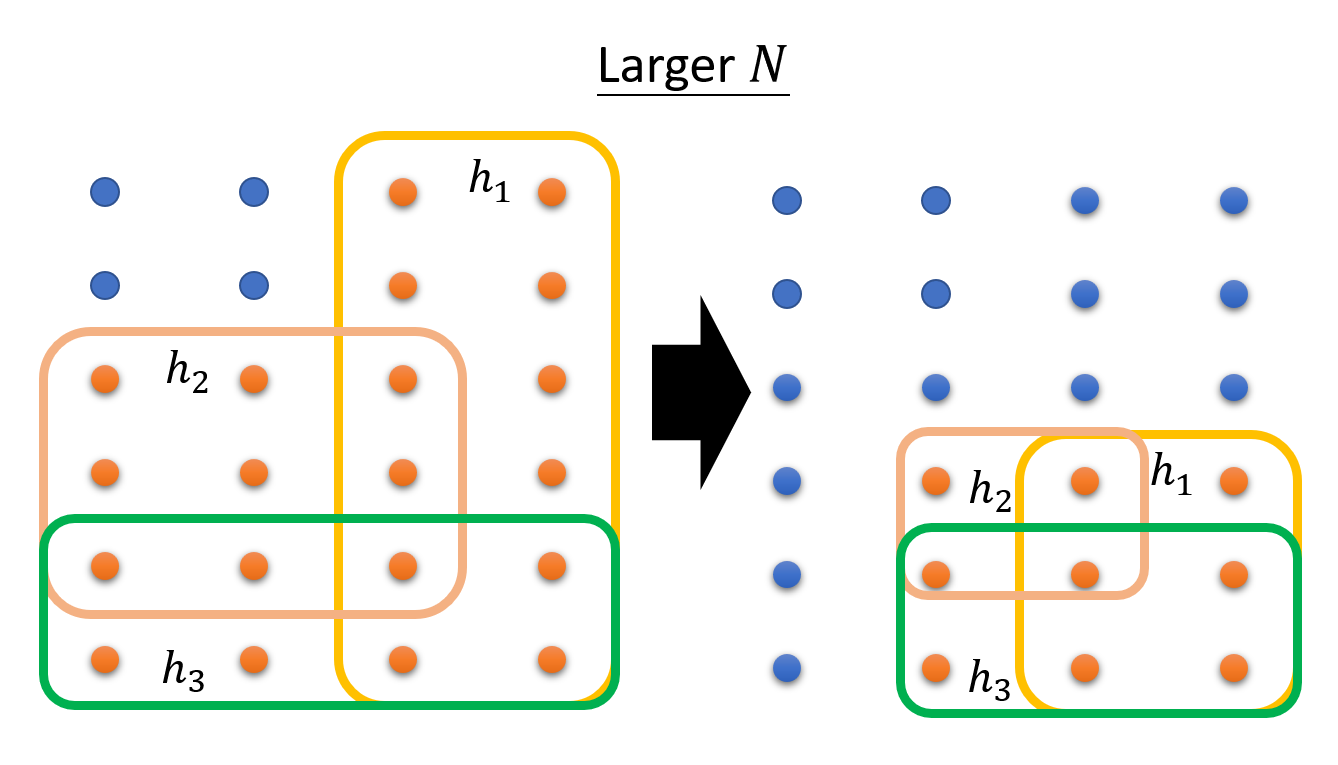
-
减小 \(|H|\)
例子
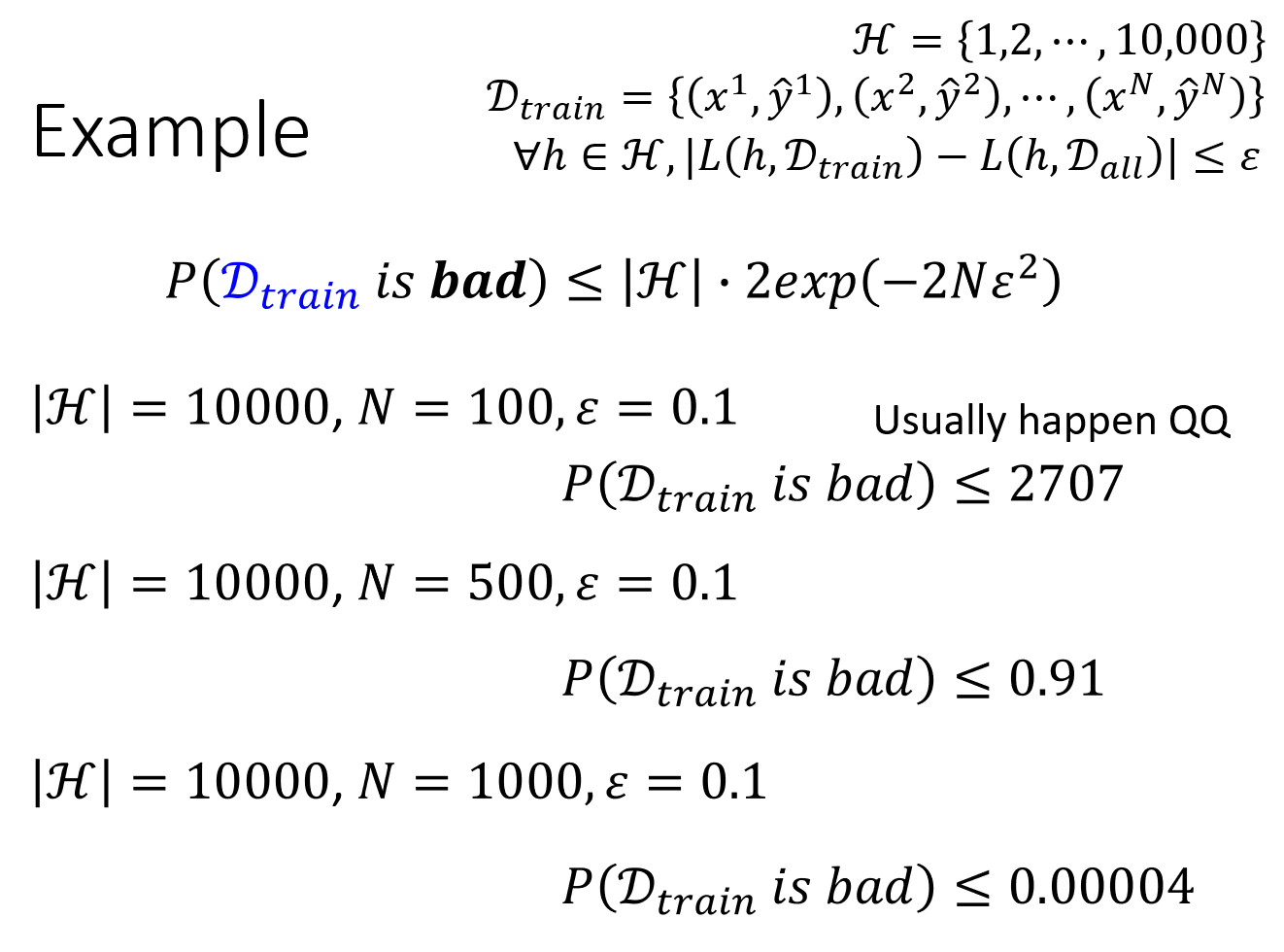
如果我们希望 \(P(\textcolor{cornflowerblue}{D_{train}}\ is\ \bm{bad}) \le \delta\),需要多少的训练样本呢?
假设 \(|H| = 10000, \delta = 0.1, \varepsilon = 0.1\),可以解得 \(N \ge 610\)
Model Complexity⚓︎
再次观察霍夫丁不等式:其中的 \(|H|\) 表示可选的函数个数。然而,可能会出现一种情况:函数的参数是连续的,那么 \(|H|\) 不就是 \(\infty\) 了吗,此时上面的不等式也就没有用了。关于这个问题,有以下几种解答:
- 计算机能做的事情都是离散的(
好像很有道理) - 使用 VC-dimension(本笔记中不会涉及到)
既然可以通过减小 \(|H|\) 来降低 \(P(\textcolor{cornflowerblue}{D_{train}})\),但为什么实际上我们不会让 \(|H|\) 变得很小?原因在于:更小的 \(H\) 意味着更少的候选函数(模型
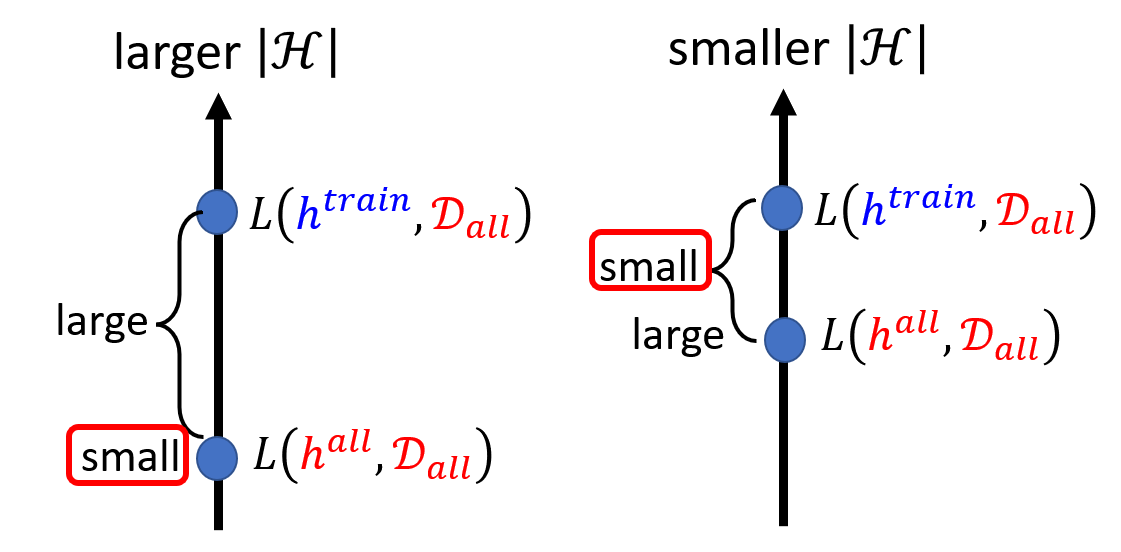
那么,是否存在一种“鱼和熊掌可以兼得”的方法呢?答案便是下一节介绍的深度学习(deep learning)!
评论区