Transformer⚓︎
约 3669 个字 预计阅读时间 18 分钟
Sequence-to-sequence (Seq2seq)⚓︎
现在我们考虑一种输入和输出都是序列(sequence) 的模型。这类模型的输出长度由模型自己决定。像语音识别,机器翻译,语音翻译等场景下的模型都属于这类模型。

下面介绍一些 Seq2seq 的具体应用:
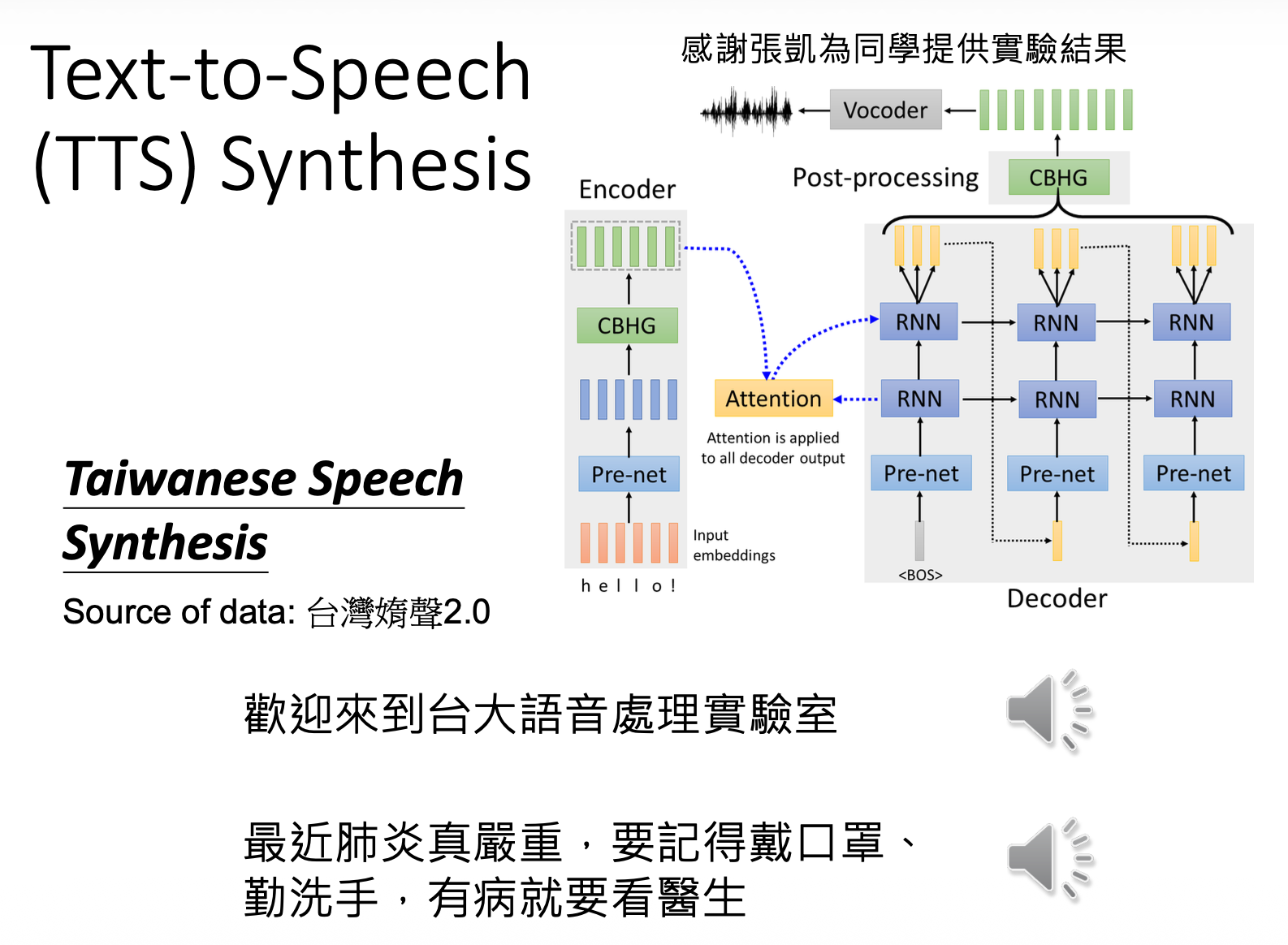
例子
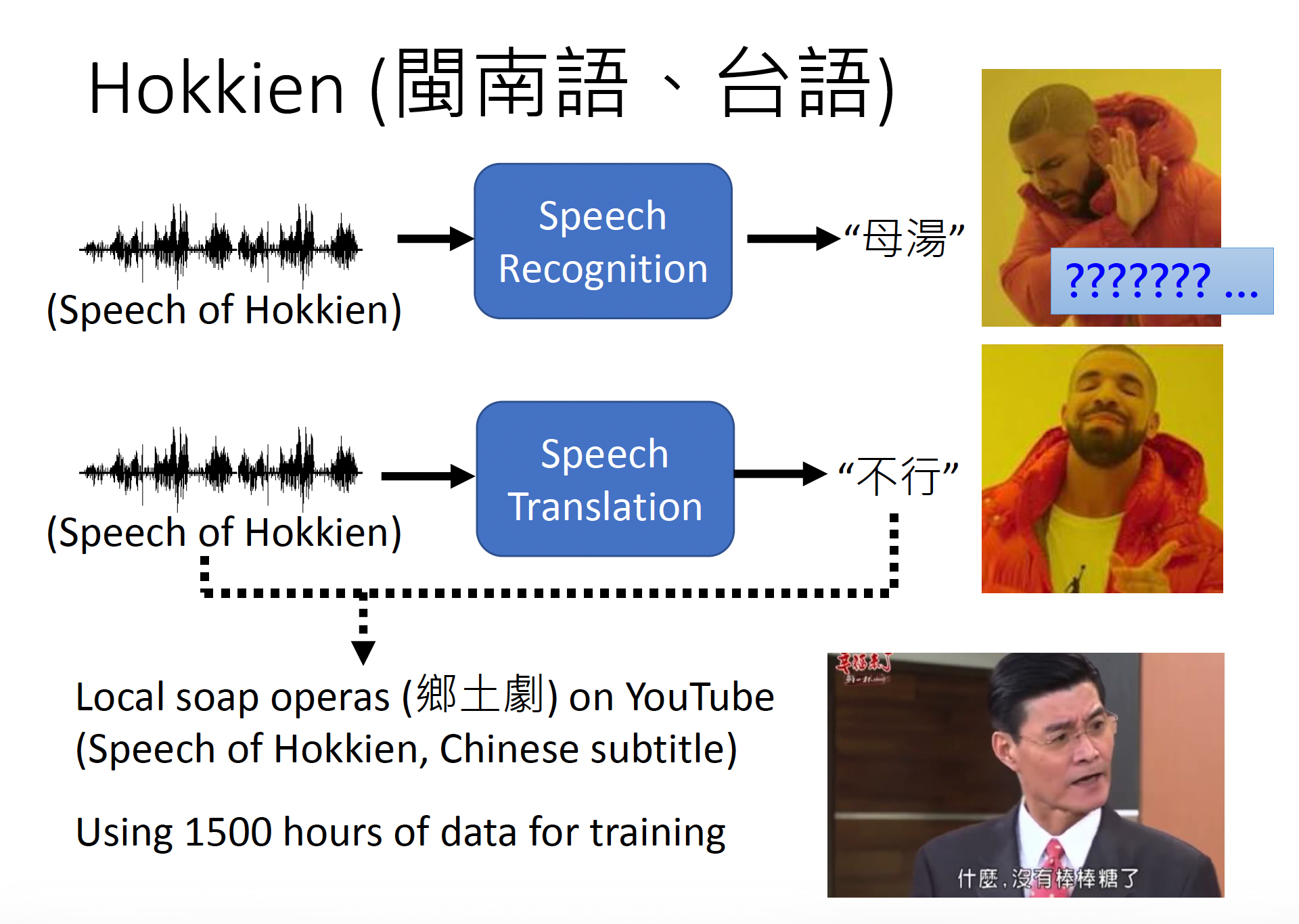
在训练的时候,我们不去考虑:
- (肥皂剧的)背景音乐和噪音
- (和声音对不上的)字幕
- 闽南语的发音
像这样不去考虑各种因素,直接拿数据训练的行为,李宏毅老师称之为“硬 train 一发”~
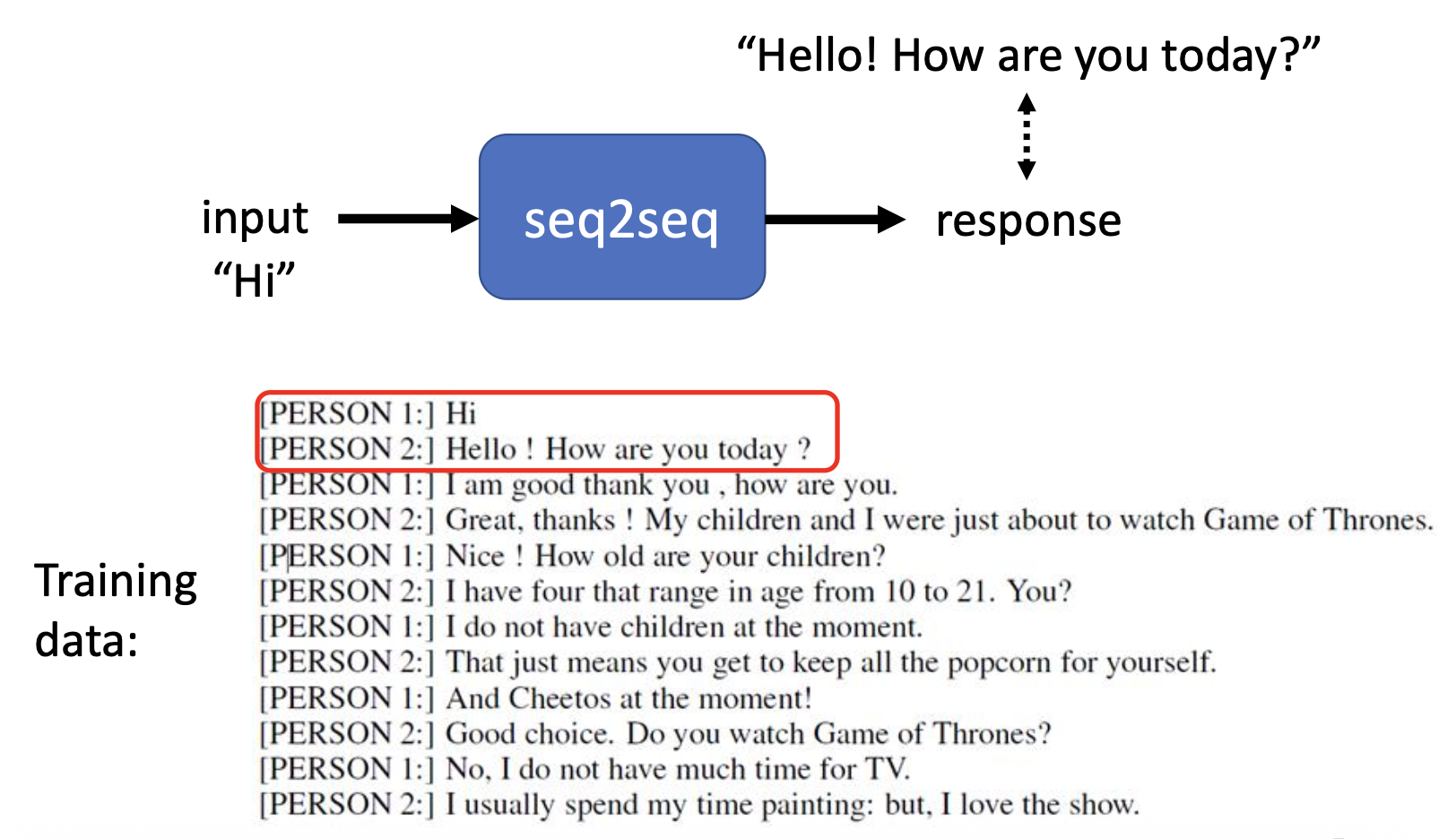
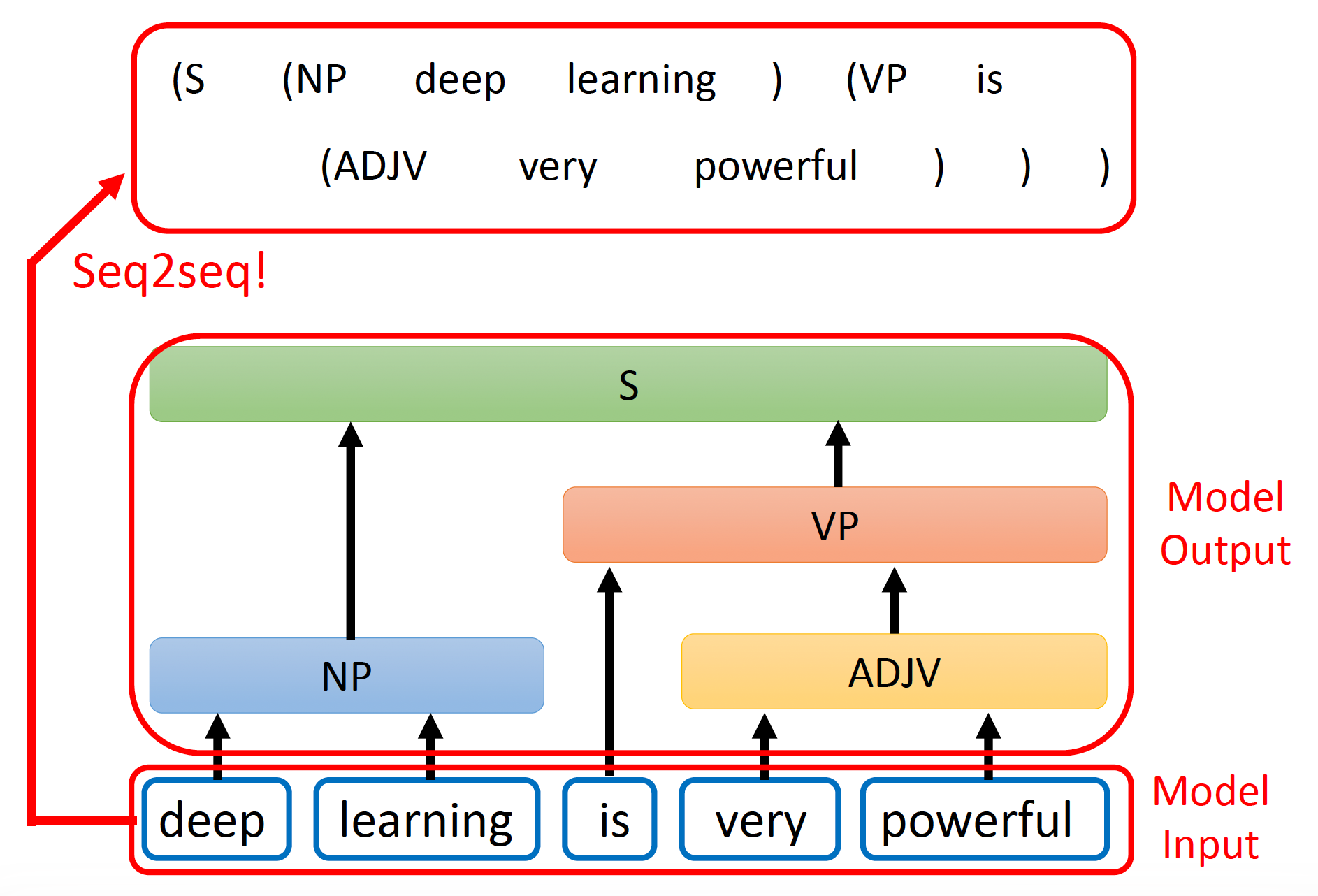
其实很多自然语言处理 (NLP) 的任务都可以看作是问题回答 (QA) 的任务,即使是一些看上去和 QA 没啥关系的任务也都可以想象成是 QA,比如机器翻译,为文章做摘要,情感分析 (sentiment analysis)(下图就是其中一个例子)等任务。
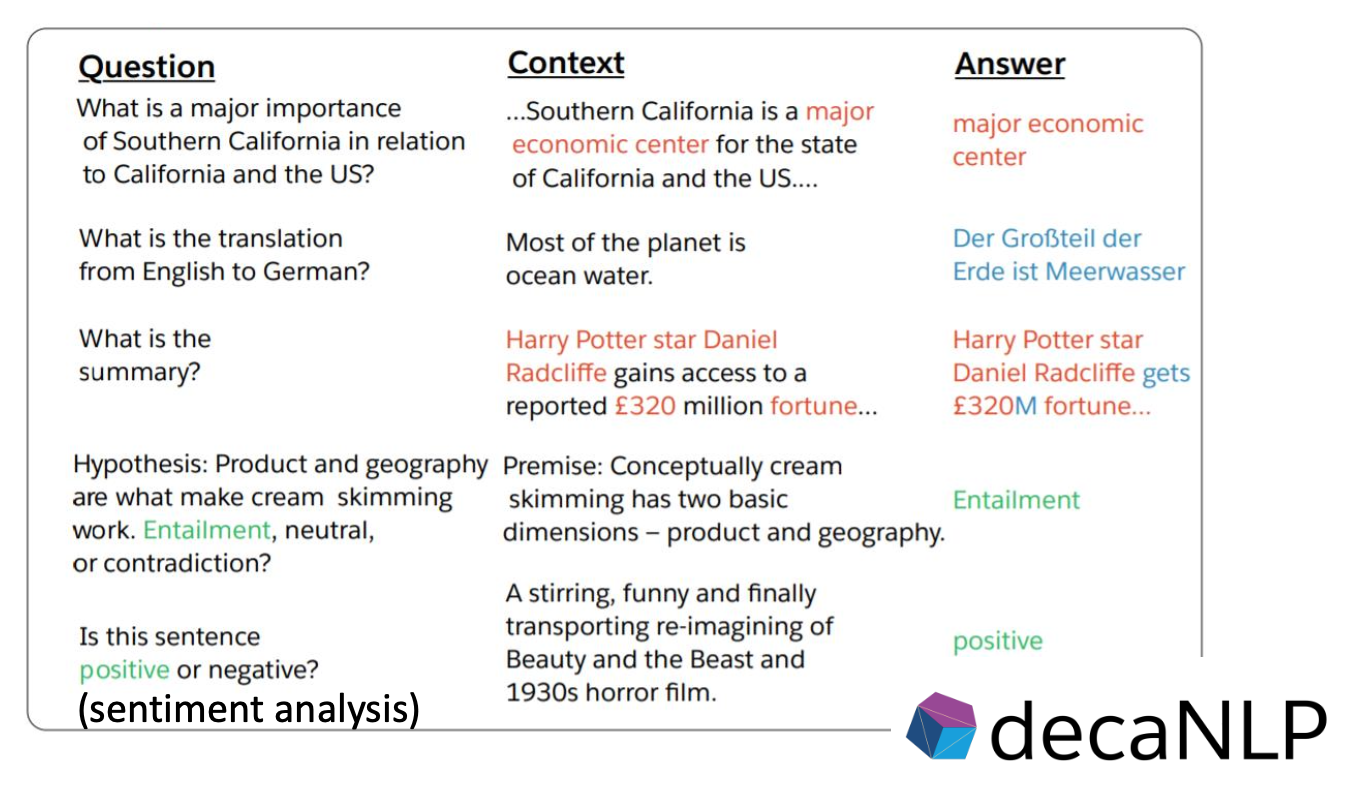
而 QA 这类问题就可以用 seq2seq 的模型来解决,相应的示意图如下所示:

但需要注意的是,多数 NLP 任务,特别是和语音相关的任务,往往需要为这些任务定制模型,这样才能得到更好的结果;换句话说,seq2seq 模型就像一把瑞士军刀,什么都能做,但给出的结果不一定是最好的。
注意
不要和前面介绍过的多类分类 (multi-class classfication) 弄混淆(前面介绍的分类都属于这种
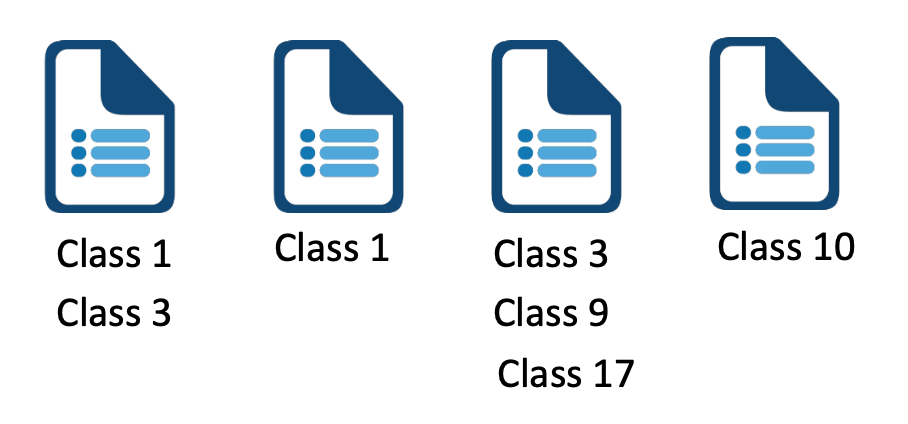
多标签分类任务允许某个对象属于多个类中(而原先介绍的分类问题每个对象仅属于一个类)

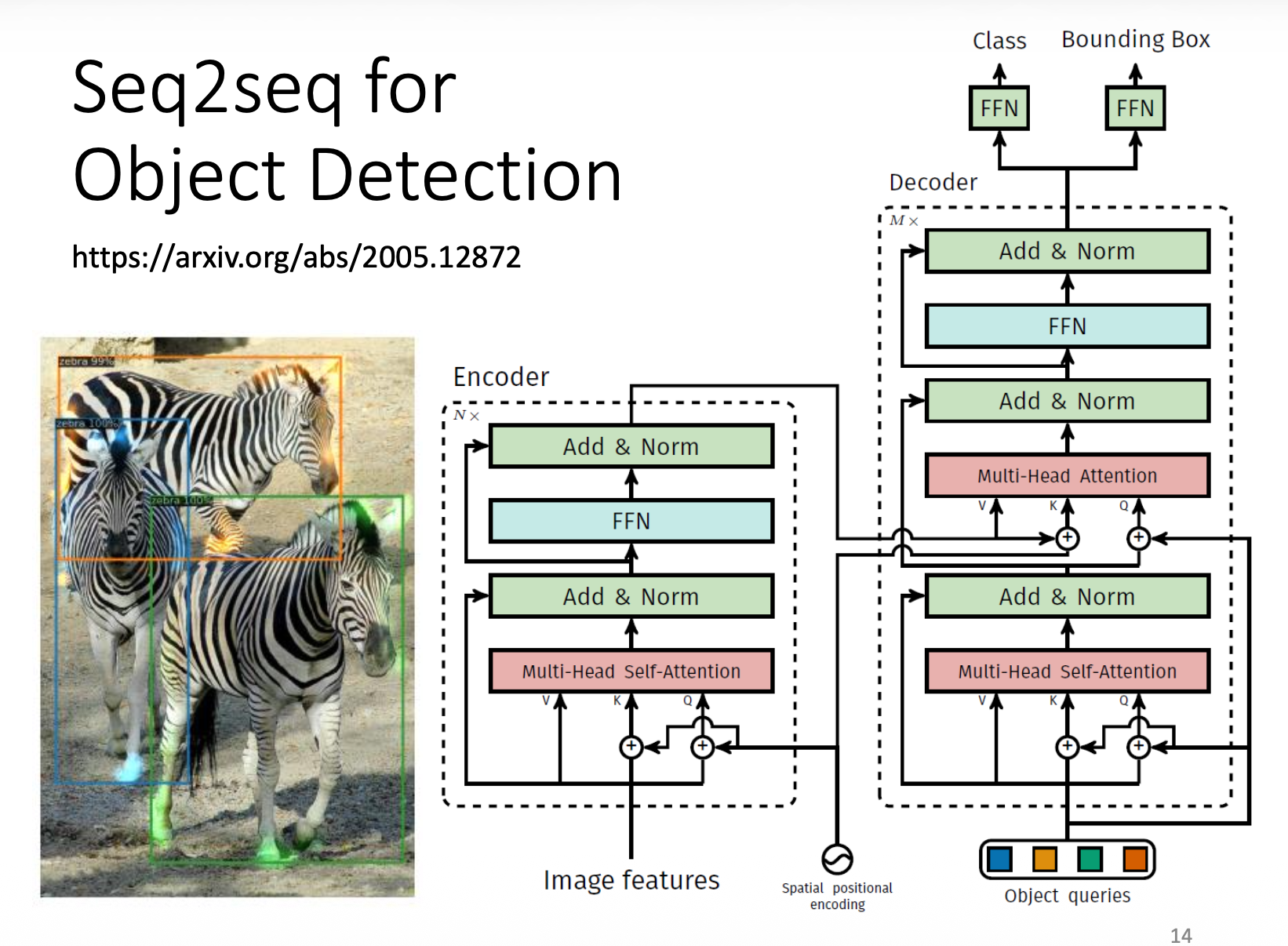
上面的众多例子是想让读者感受到 seq2seq 模型的强大!
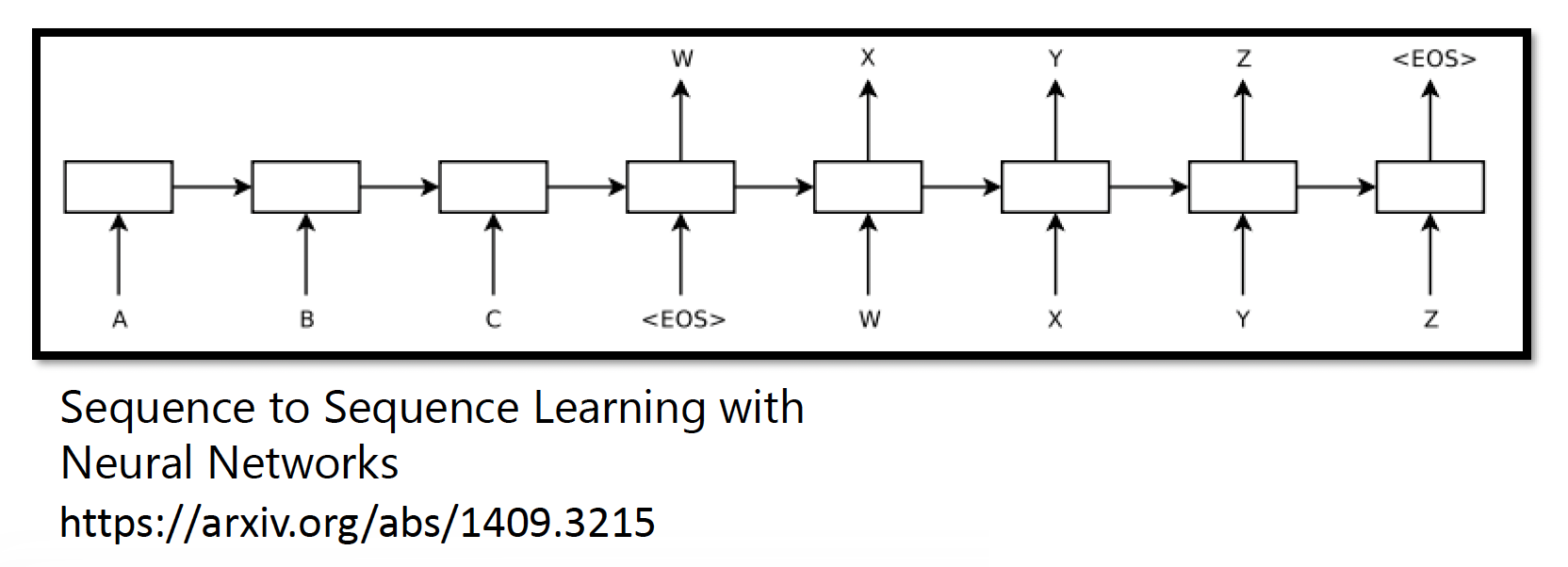
那么 seq2seq 模型具体是如何实现的呢?一般的 seq2seq 模型的组成如下所示:
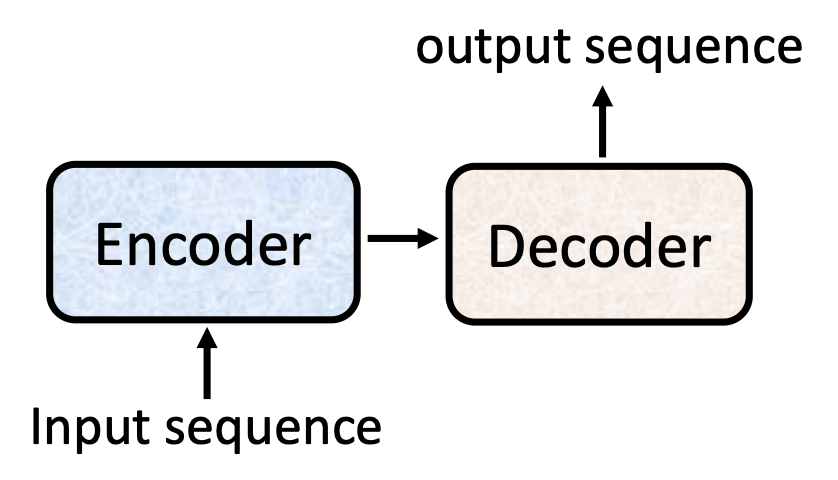
- 编码器(encoder):处理输入序列,并将处理好的结果传给解码器
- 解码器(decoder):决定输出序列
下面这篇 paper 是 seq2seq 模型的最早起源:
当然,最知名的模型莫过于 Transformer(它也是目前众多主流 LLM 的基石,可见其重要性
Transformer⚓︎
Encoder⚓︎
简单来说,编码器要做的事就是对于给定的一组(输入)向量,输出一组向量。也许读者会想:之前介绍的 RNN 或 CNN 也能完成这样的任务,那么这个编码器的高明之处在哪里呢?那我们就得关注编码器的具体实现了(右图)~
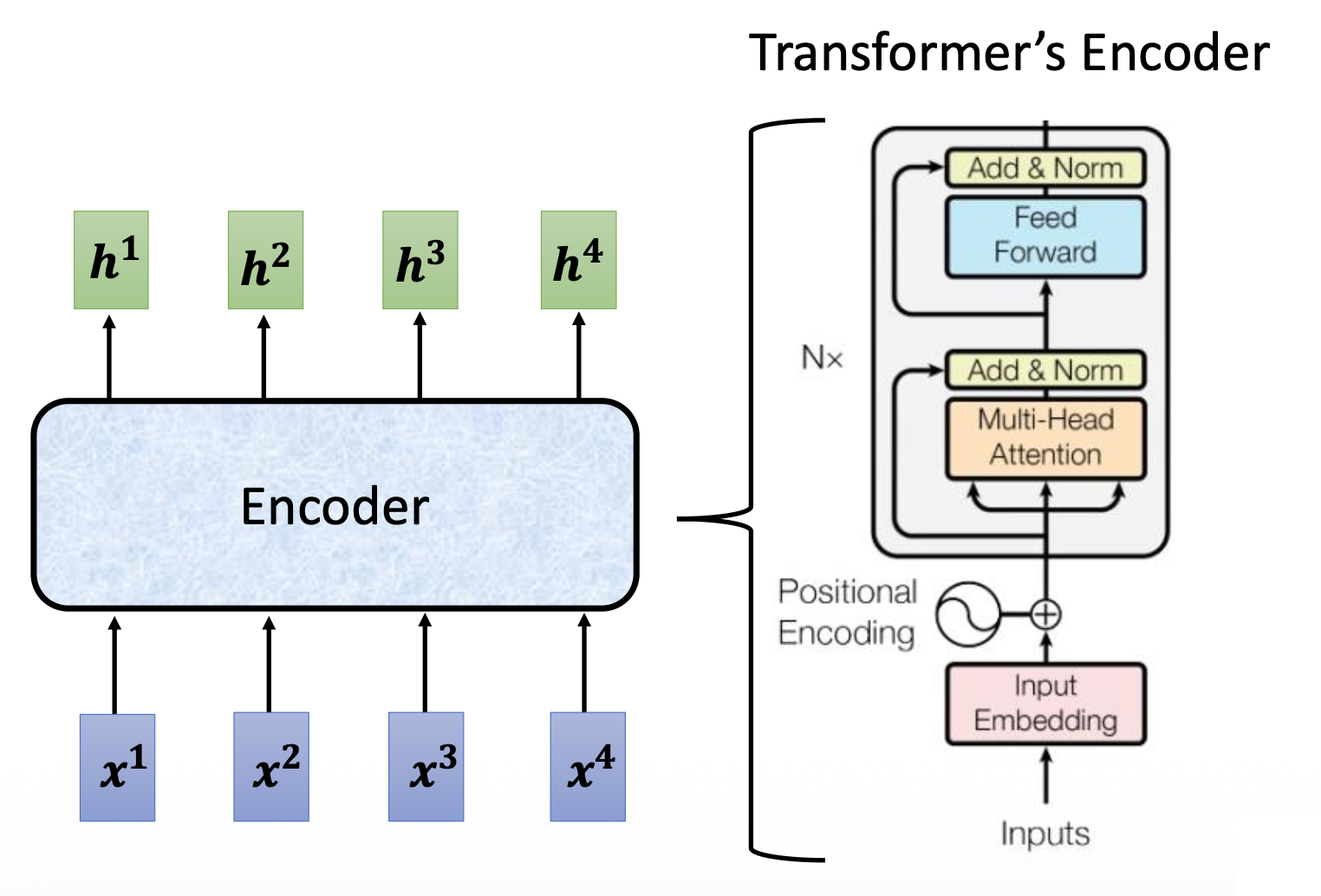
当然右图的结构有些复杂,所以下面给出简化后的样子:
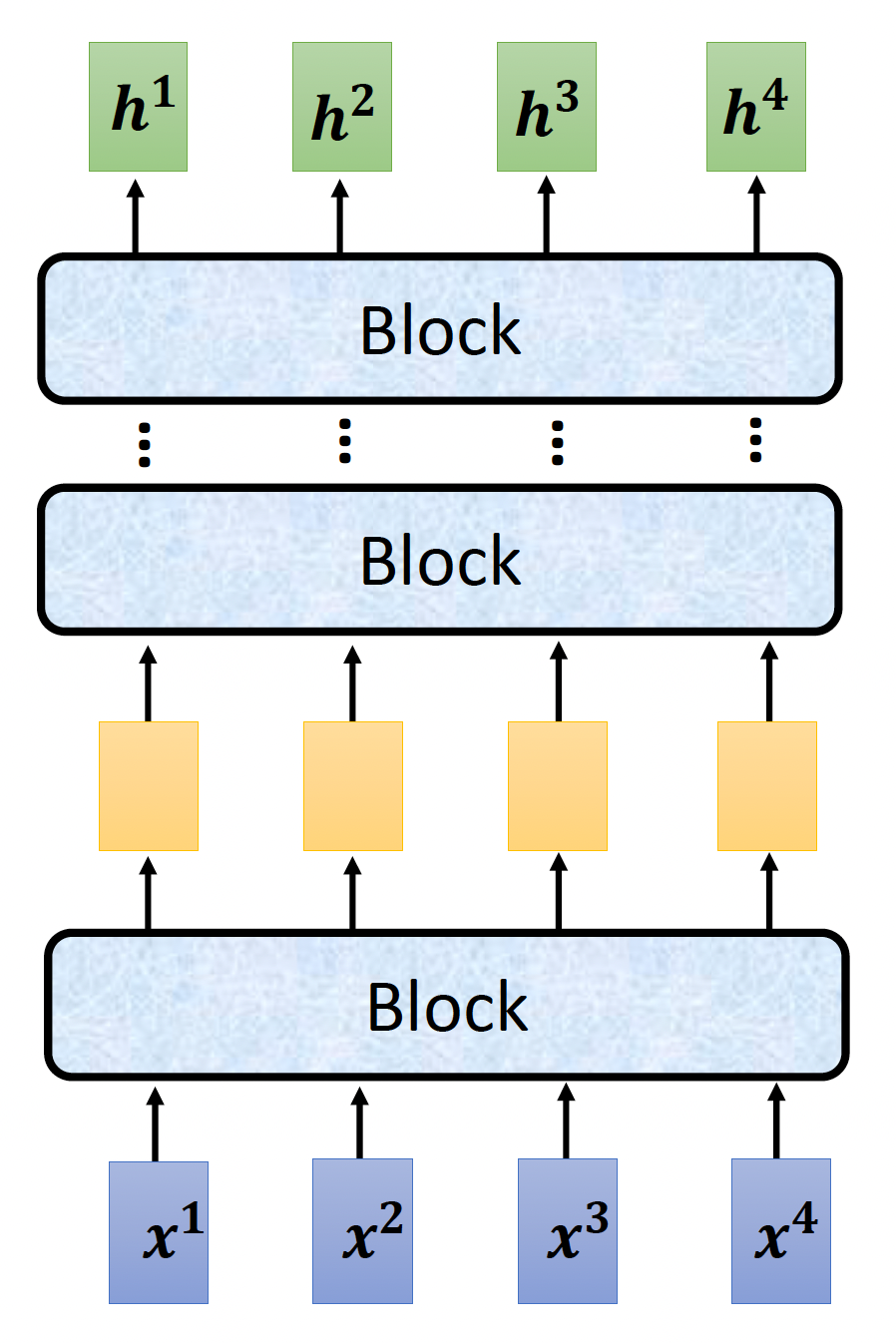
可以看到,编码器内部被划分成多个块 (block),每个块要做的就是接收一组向量,然后输出新的一组向量,传递给下一个块。而每个块内部的实现如下——实际上用的就是前面刚介绍的自注意机制 + 全连接神经网络
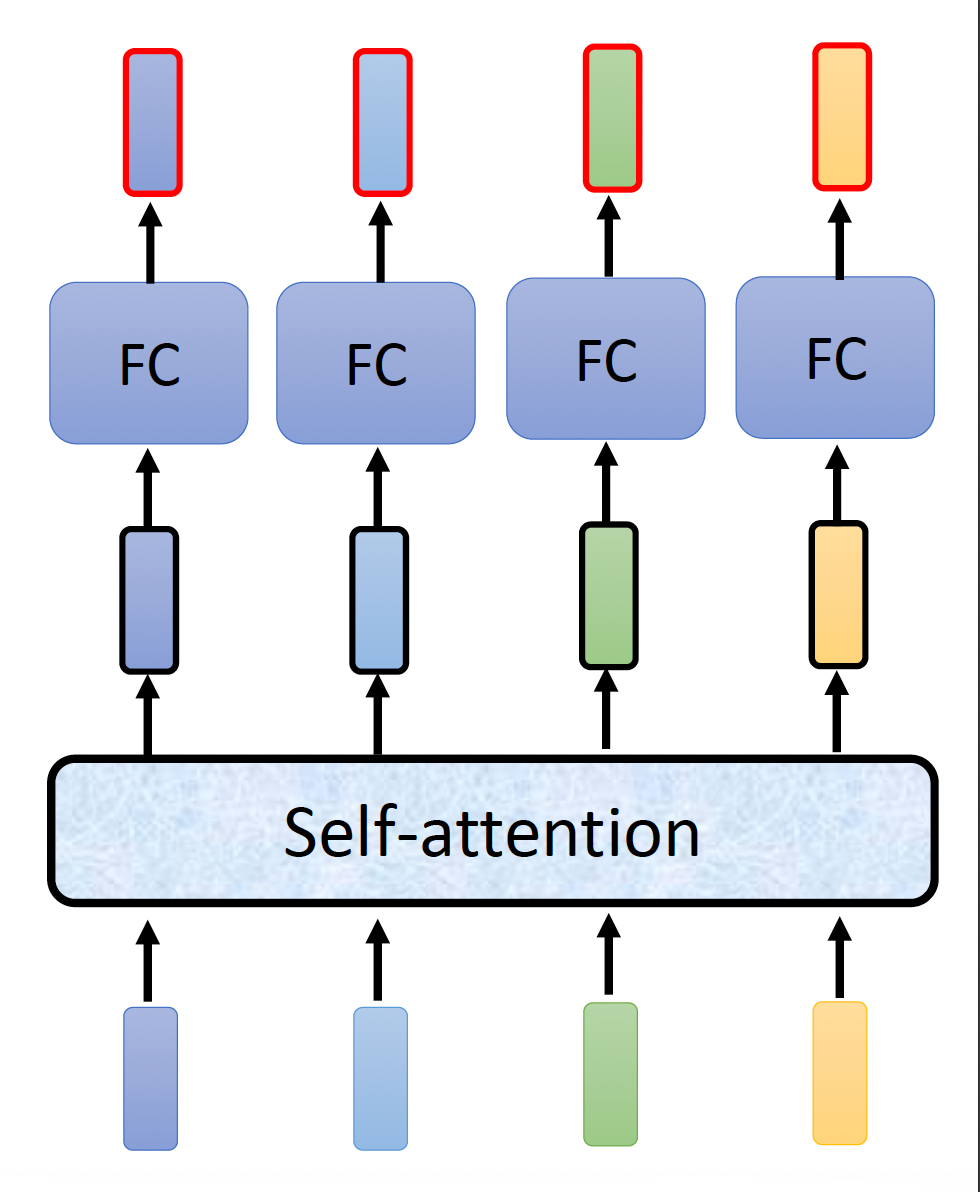
注意:前面的实现是简化过的,在 Transformer 中真正的实现是长这样子的(就拿其中一个输入向量分析
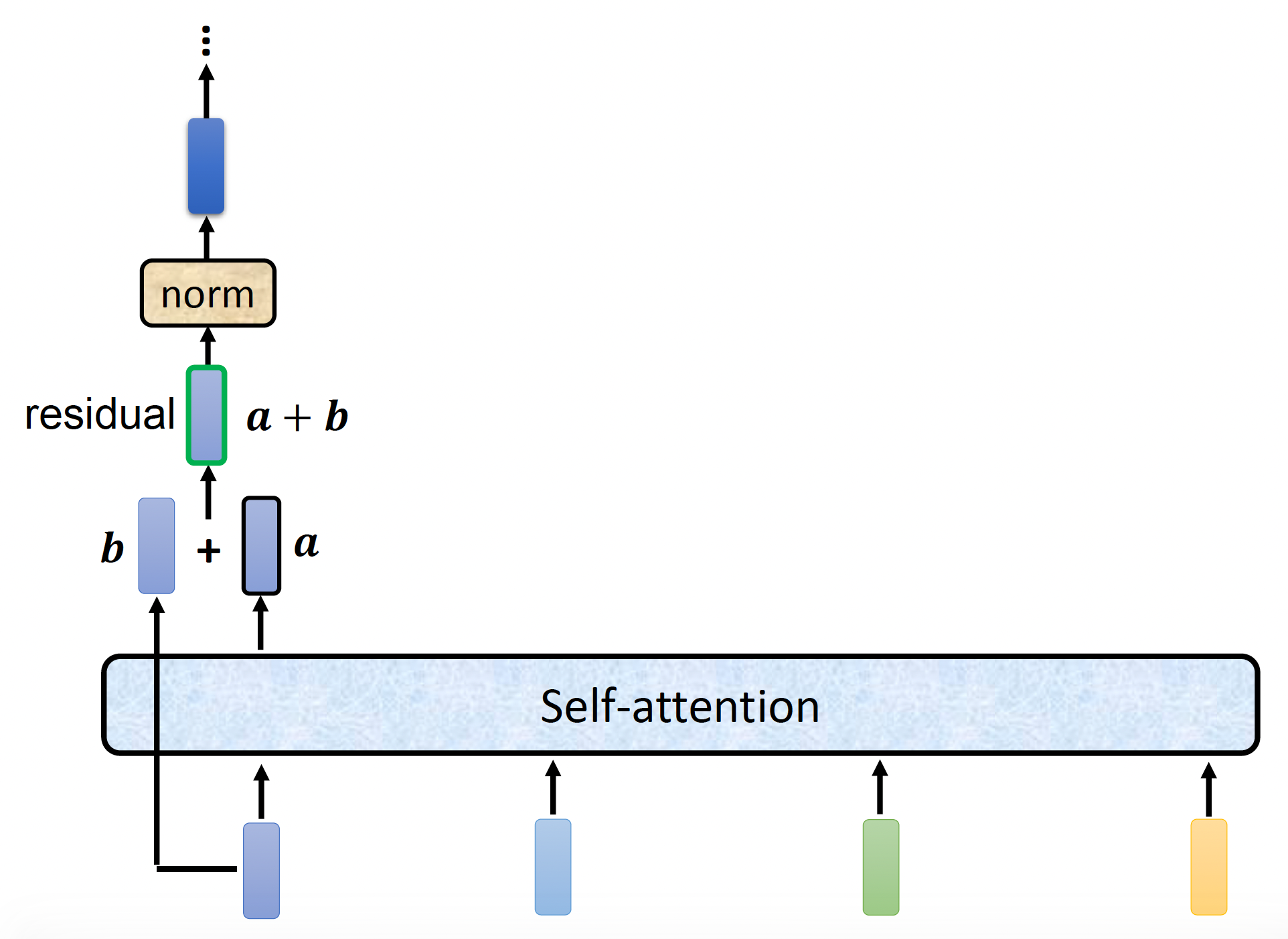
- 记经过自注意处理得到的向量为 \(\bm{a}\),原输入向量为 \(\bm{b}\)
- 先做一次残差连接(residual connection):\(\bm{a} + \bm{b}\)
-
然后将残差连接后的结果做层归一化(layer normalization) 处理
-
归一化要做的就是: $$ \begin{bmatrix}x_1 \ x_2 \ \dots \ x_K\end{bmatrix} \Rightarrow \begin{bmatrix}x_1' \ x_2' \ \dots \ x_K'\end{bmatrix} $$
其中 \(x_i' = \dfrac{x_i - m}{\sigma}\),\(m, \sigma\) 分别为原向量的均值和标准差
-
-
接着将层归一化后的向量传给 FC,做和自注意机制类似的处理(重复上面的步骤
) :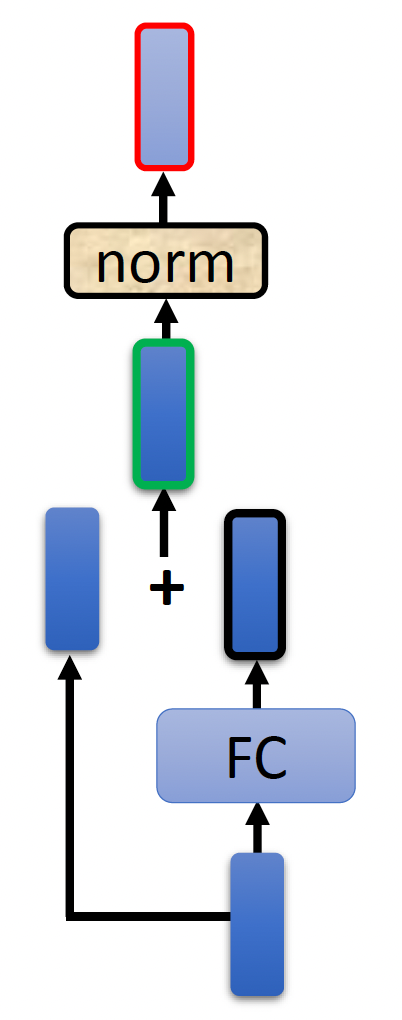
图中红色边框的向量才是一个块的输出向量
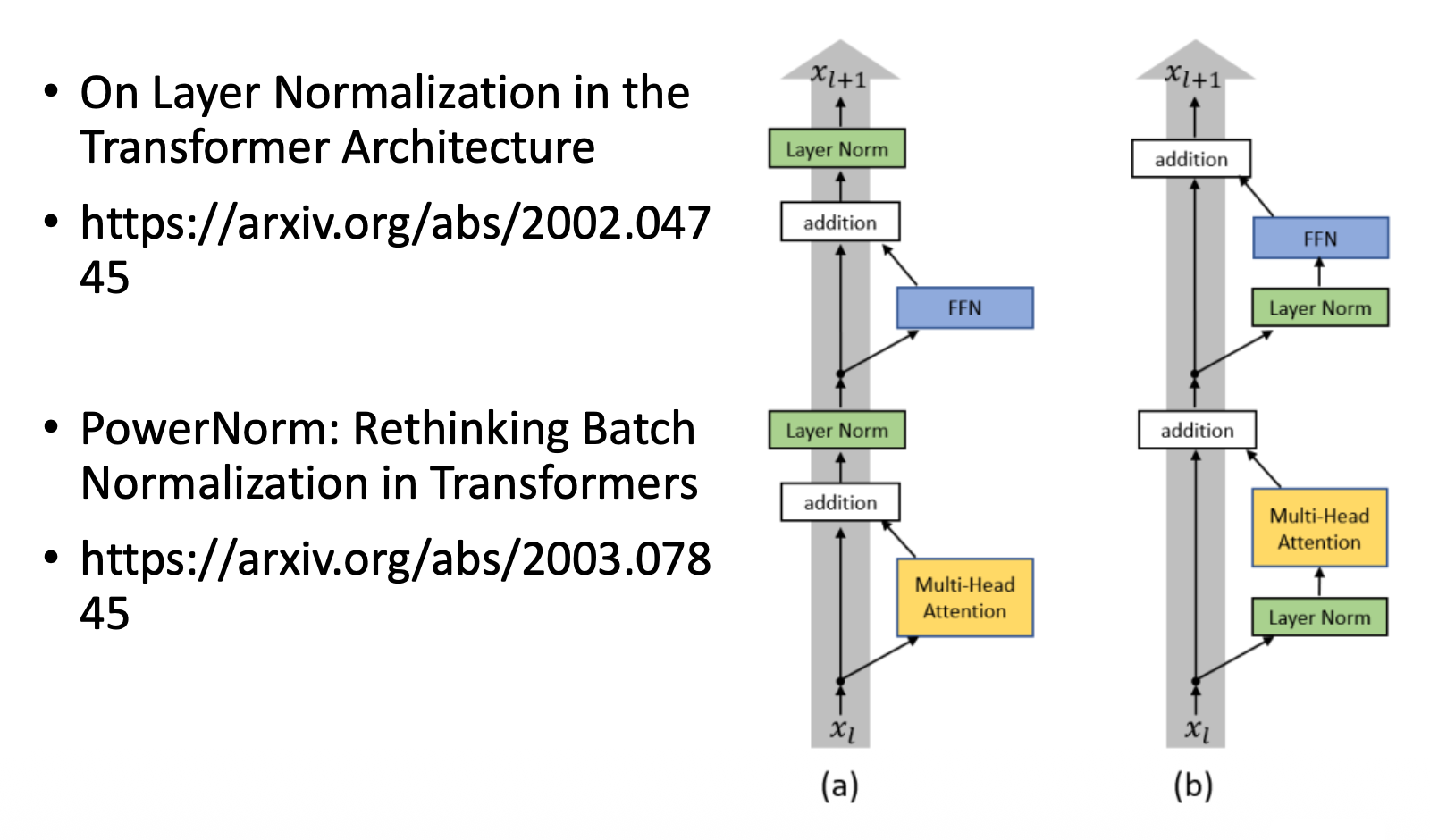
上面的分析其实还漏了一些细节:
知名的 BERT 模型采用和 Transformer 编码器相同的网络架构。
原始的 Transformer 编码器中各模块的排列顺序不一定是最好的——有一些研究就是从这里出发做出一些改进:
Decoder⚓︎
解码器有 2 种,比较常见的是自回归(autoregressive) 的解码器,所以先来介绍这个。
Autoregressive (AT)⚓︎
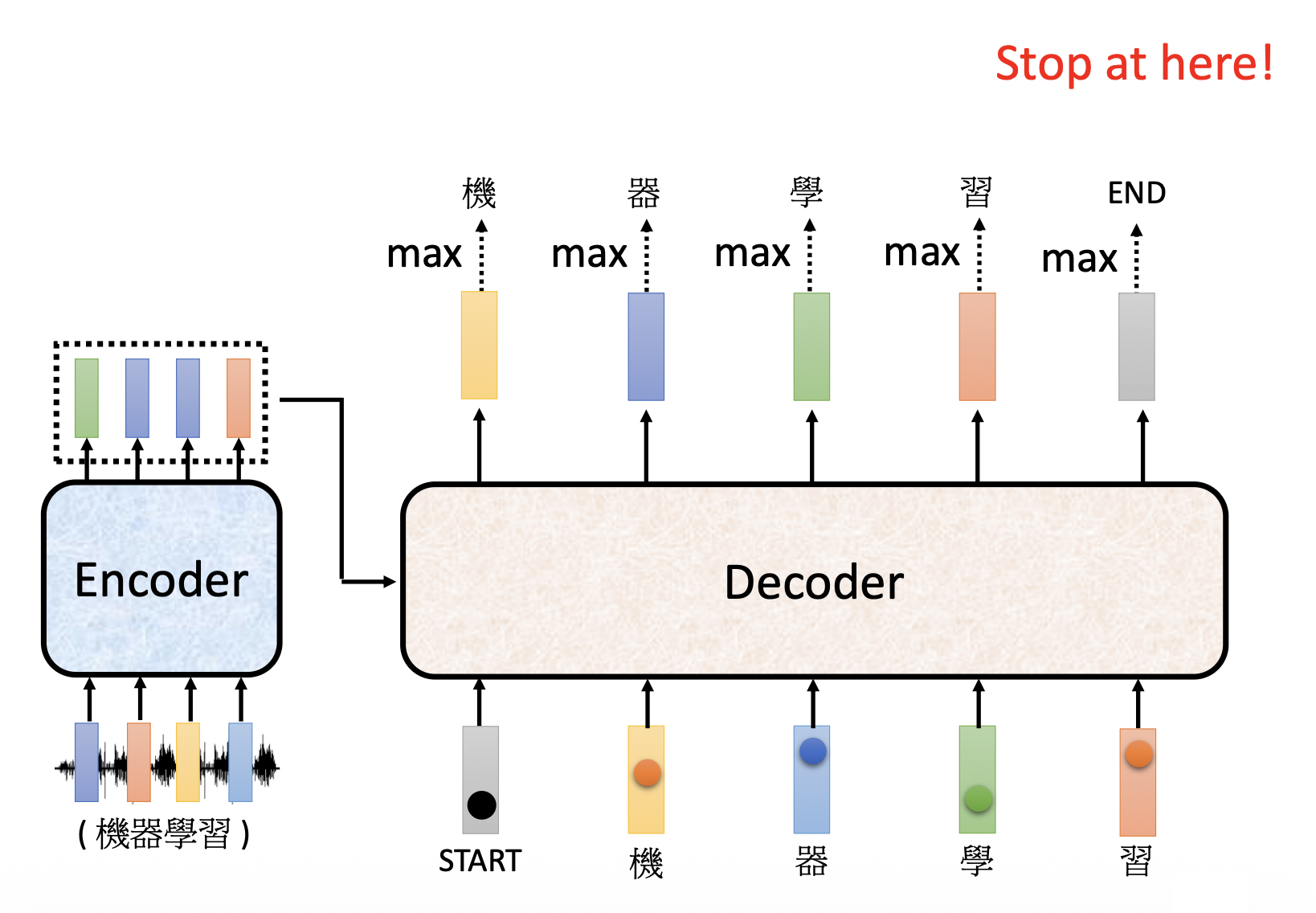
下面以语音识别这一应用为例介绍。
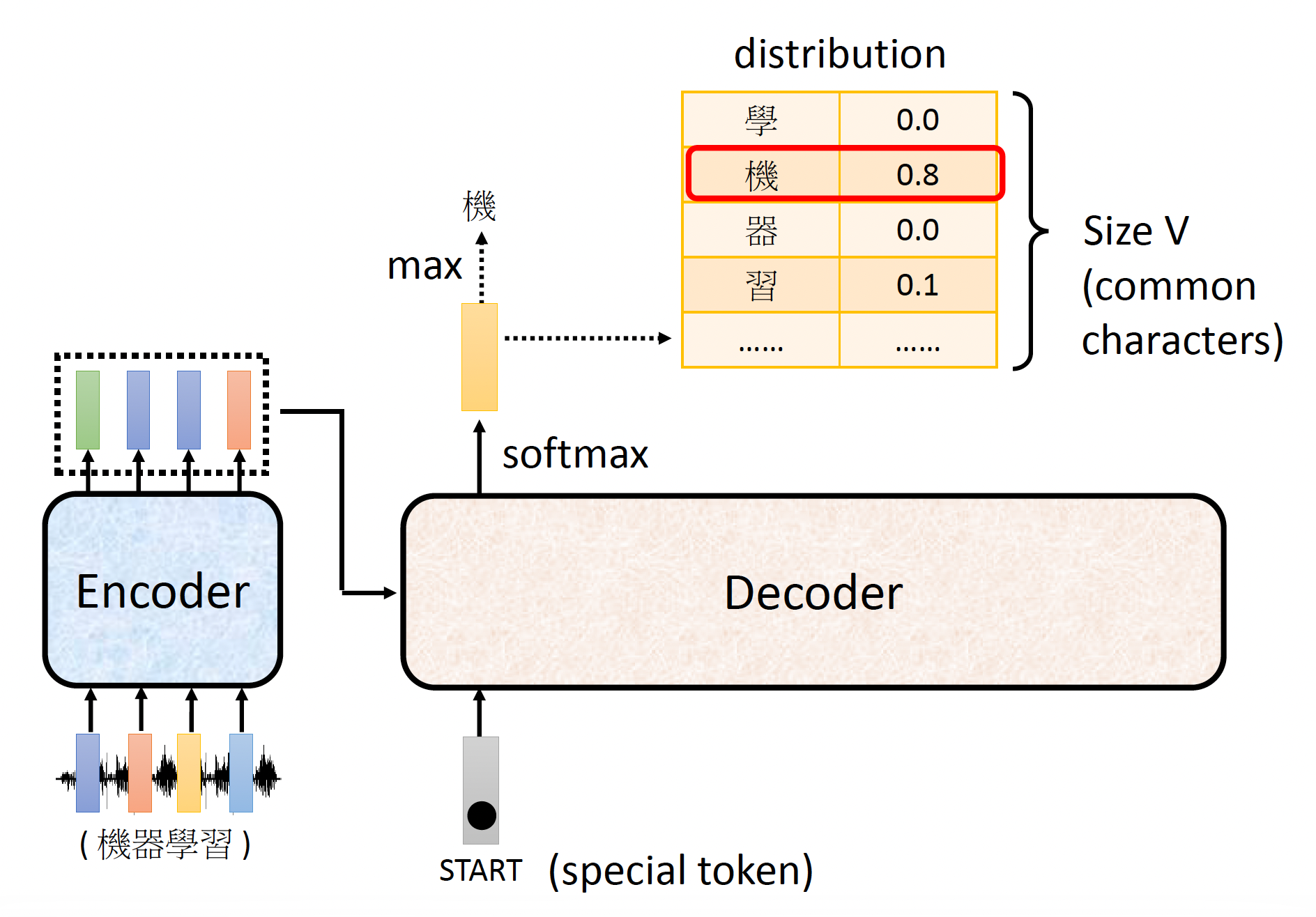
- 解码器读取编码器的输出(至于怎么读之后再说)
- 解码器还接收一个表示开始 (START) 的特殊记号,这个记号可以用一个独热向量来表示
- 解码器输出的向量长度和词汇表(这里包含了所有常见的汉字)的长度一致(因此很长)
- 在解码器生成向量前要经过 softmax 处理(类似做分类任务
) ,使得向量所有元素之和 = 1,此时输出向量就是一个概率分布(distribution) - 向量元素值最大的对应的字就是最终的输出
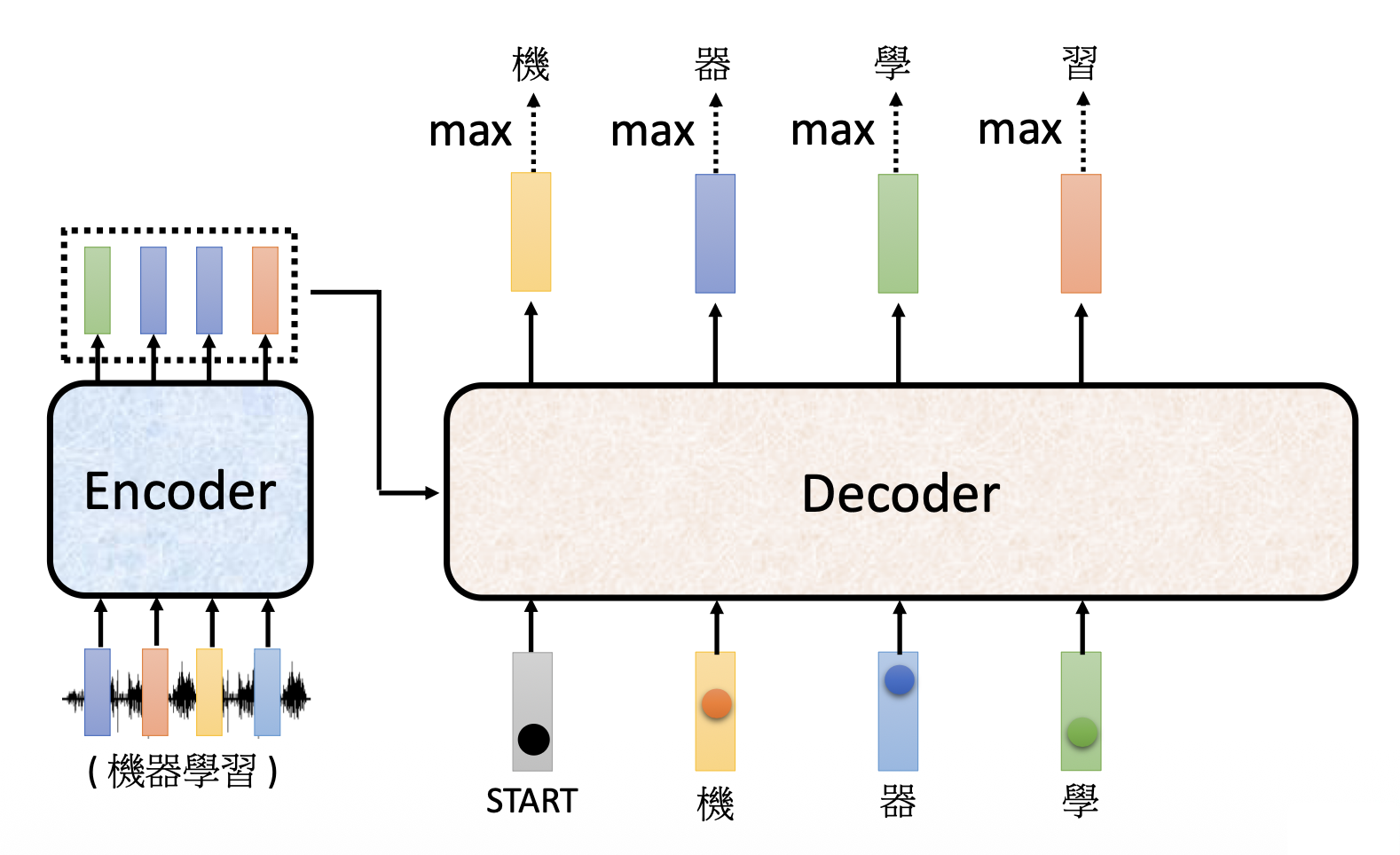
接下来就要将第一个输出(上图的“机”)作为解码器的第二个输入(也用独热向量表示
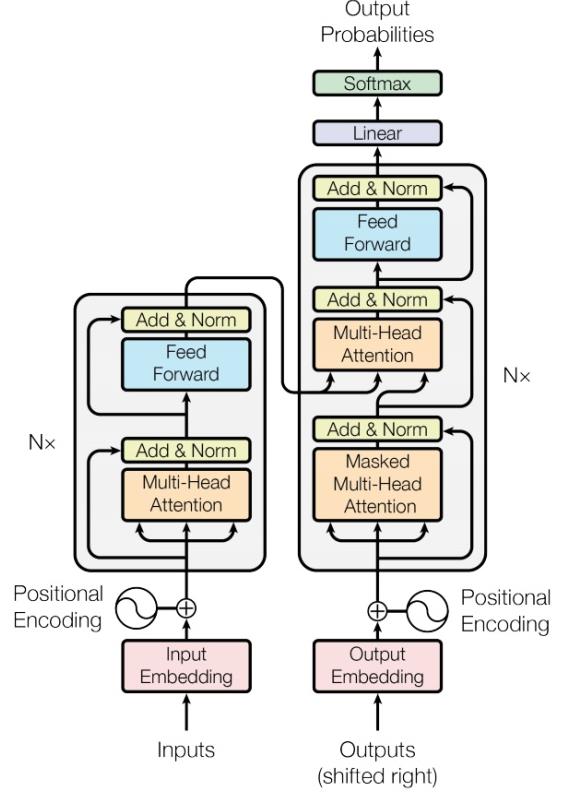
解码器的内部结构如下(比编码器更复杂
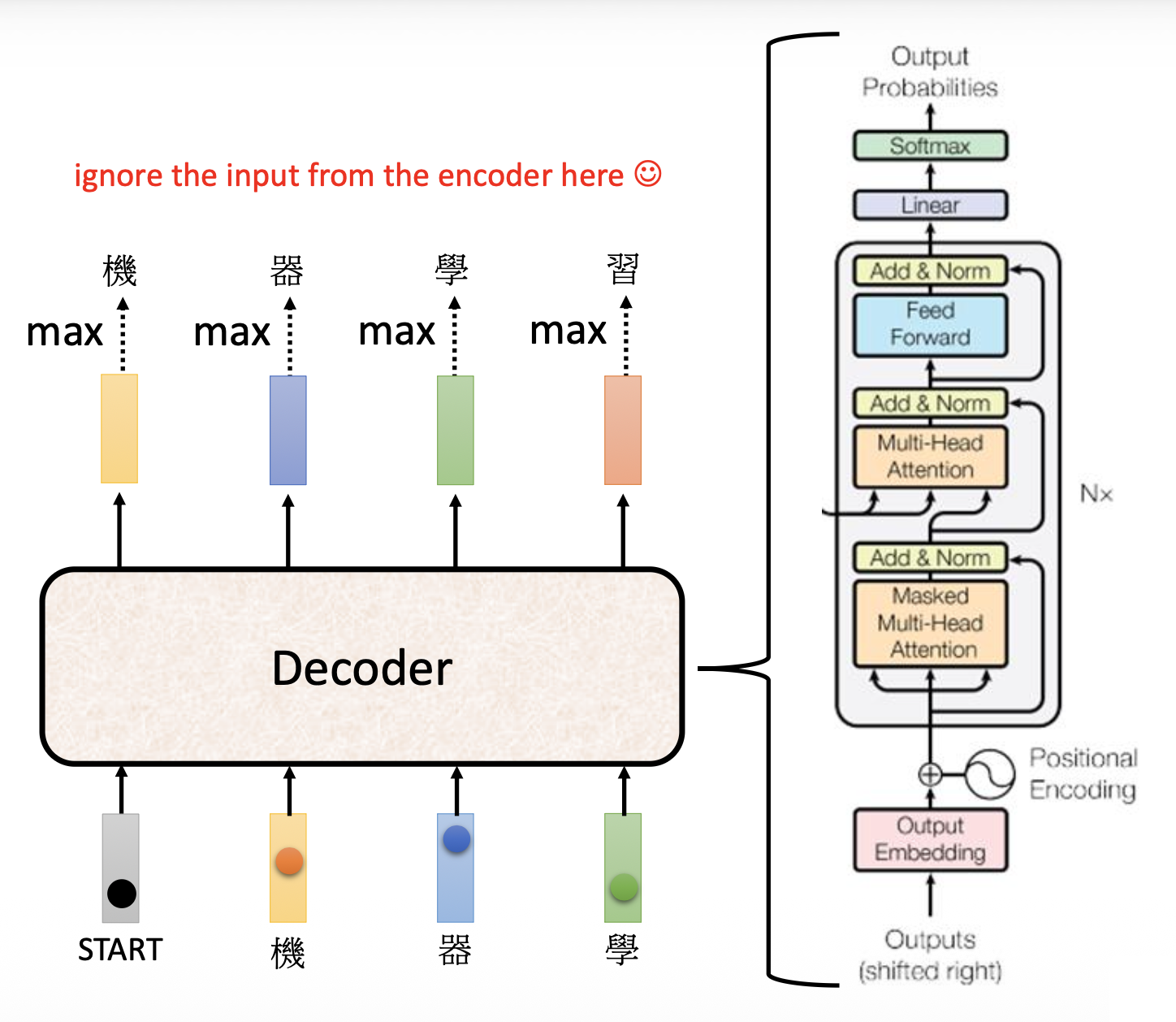
我们将编码器和解码器的结构图放在一起看,发现如果将解码器中间的模块遮起来后,二者的结构几乎一模一样,除了:
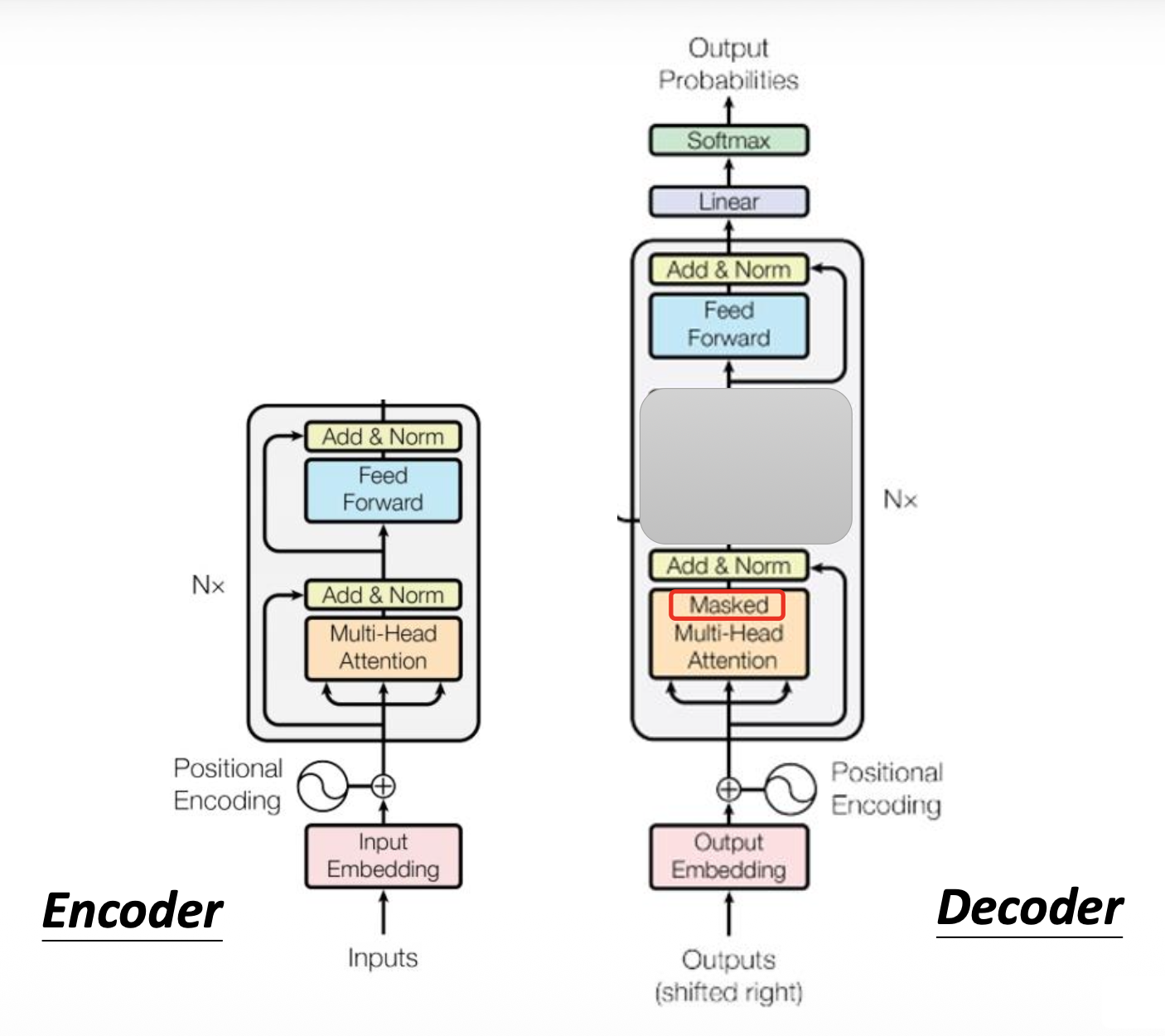
- 因为解码器输出的是一个概率而非向量,因此最后要做一步 softmax 处理
- 解码器的自注意是一种掩码 (masked) 多头自注意,下面就来分析其细节
先来回顾一下一般的自注意机制的样子:
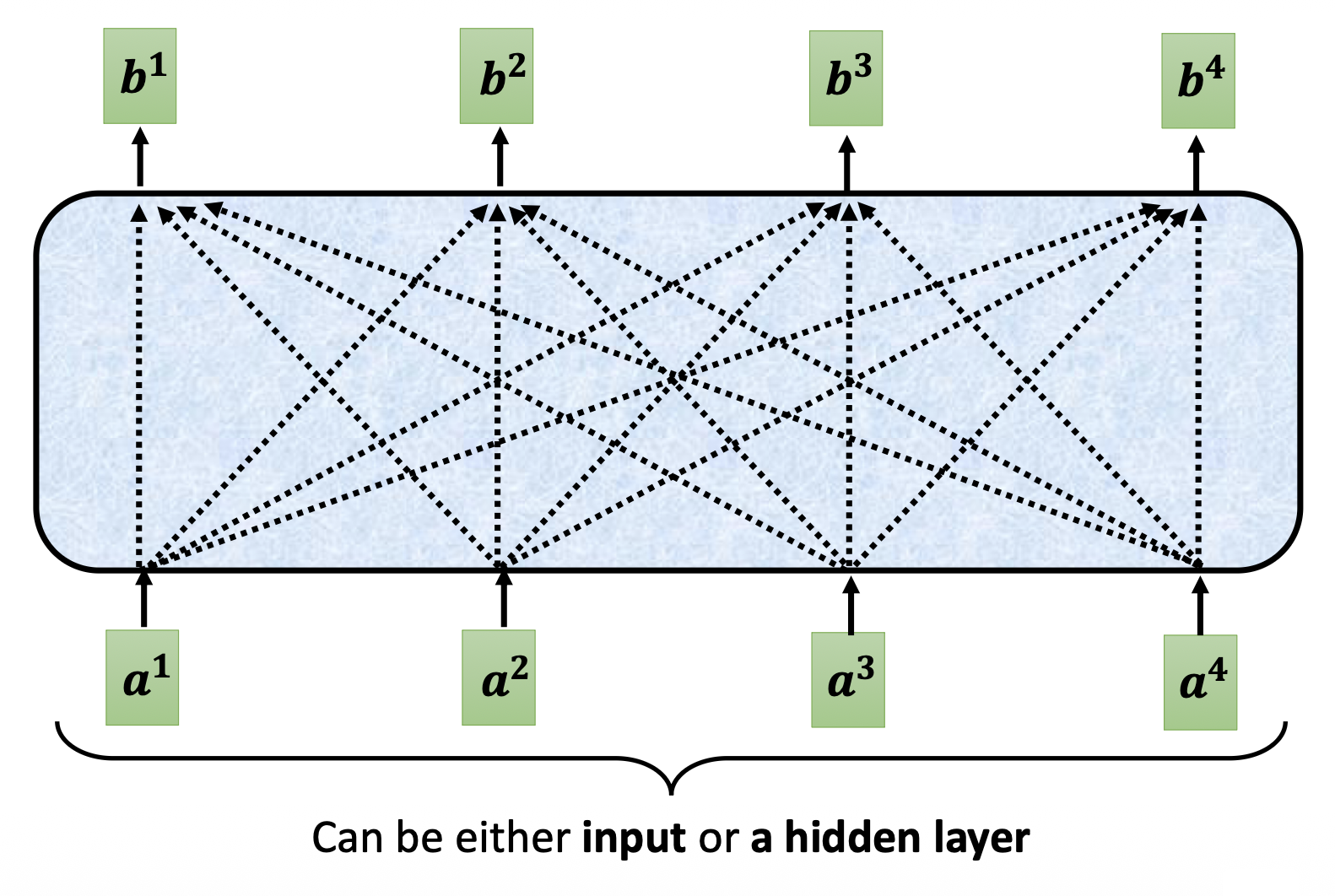
而这是掩码后的自注意机制:
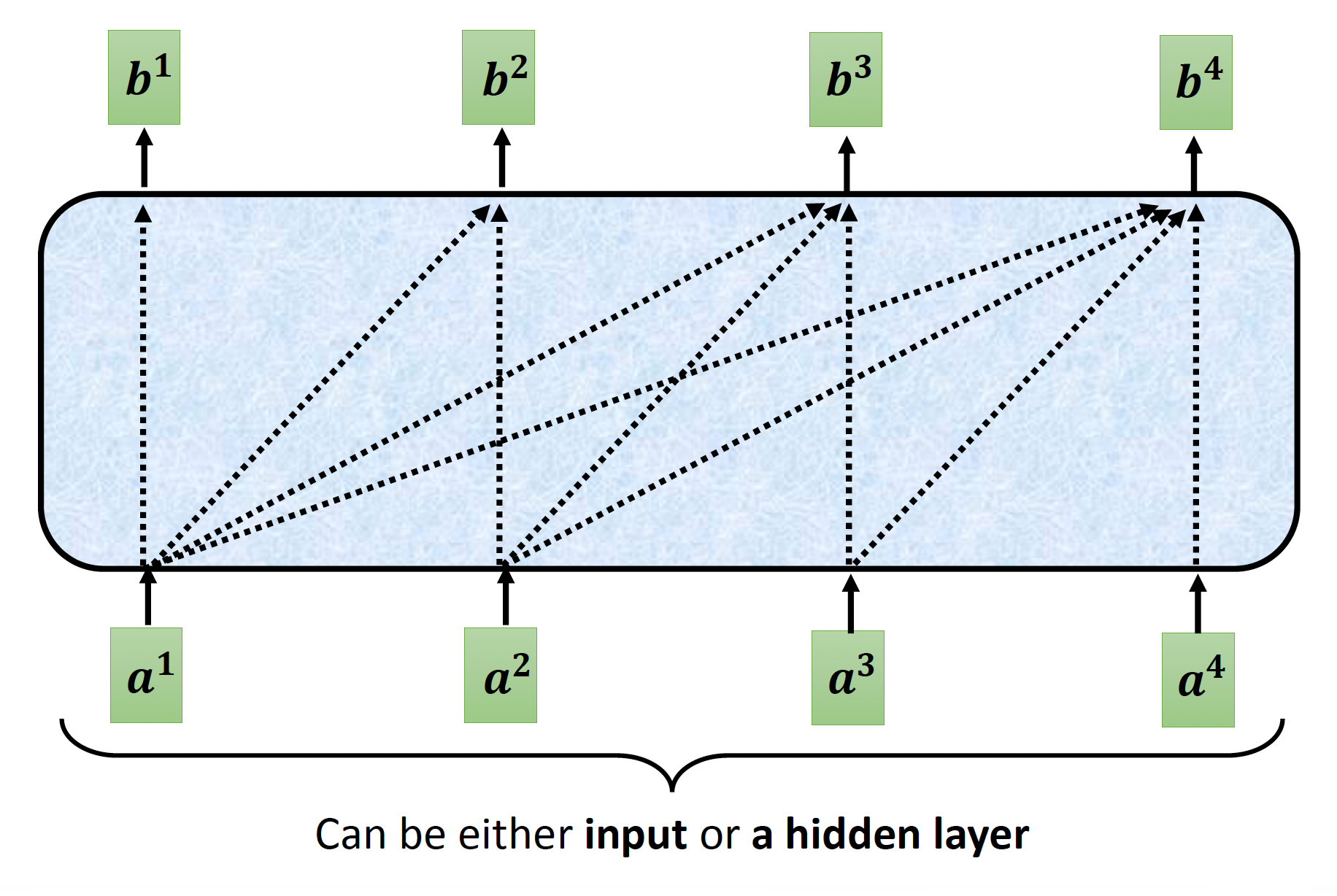
不难发现,在掩码版本的自注意机制中,输出向量 \(\bm{b}^i\) 只能读取其左边的输入向量(从 \(\bm{a}^1\) 到 \(\bm{a}^{i}\)
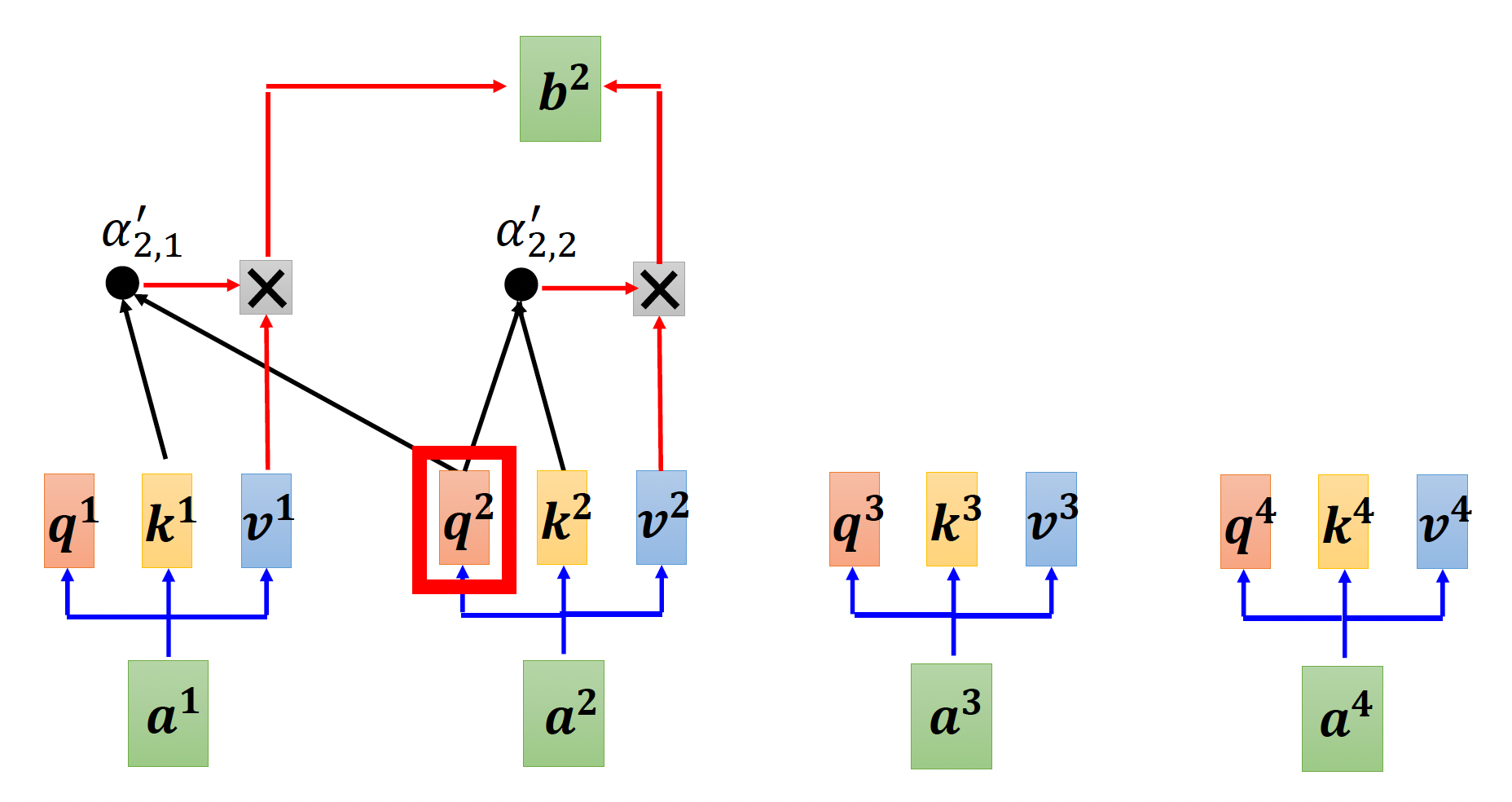
但为什么要这么做呢?答案就在解码器的工作机制中——前面提到过,解码器第 \(i\) 个位置上的输出向量是根据之前的输出向量(左侧)得到的,所以它只知道前面的向量是什么,无法得知所有的输入向量。这就是为什么解码器的自注意比较特殊的原因。
由于我们无法预先得知正确的输出长度,所以如果不加处理的话,模型可能会一直输出下去,停不下来了,这显然不符我们的预期。
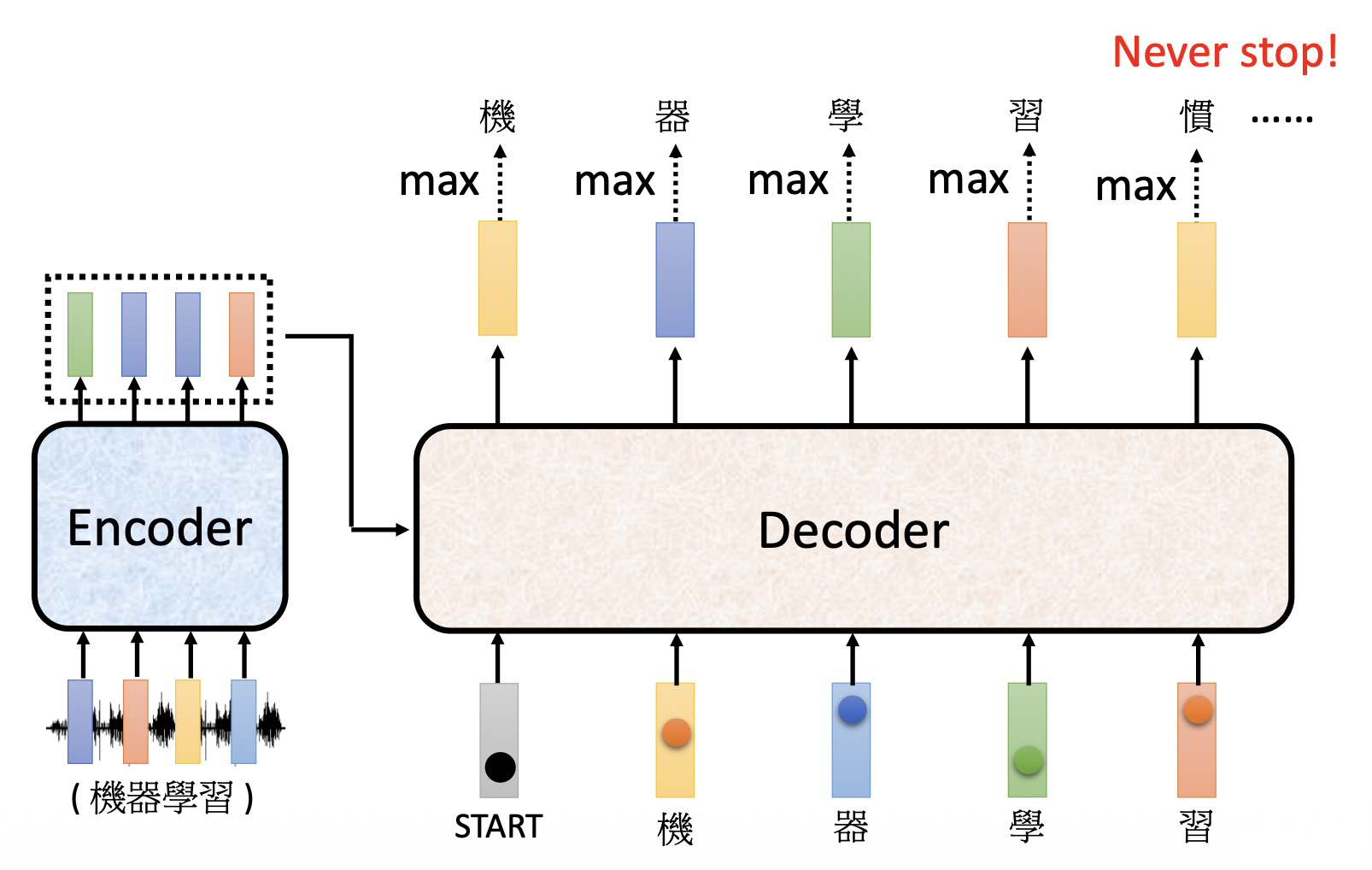
和解码器最初接收的 START 特殊记号一样,我们引入一种停止记号,记作 END。对于前面“机器学习”这四个字的语音识别,我们要求解码器在看到 BEGIN 记号和这四个字对应的输入向量后,就知道语音识别要结束了,应该输出 END 记号,从而结束输出。
Non-Autoregressive (NAT)⚓︎
下面仅简单介绍 NAT。
对比自回归 (AT) 和非自回归 (non-autoregressive, NAT) 这两类解码器:
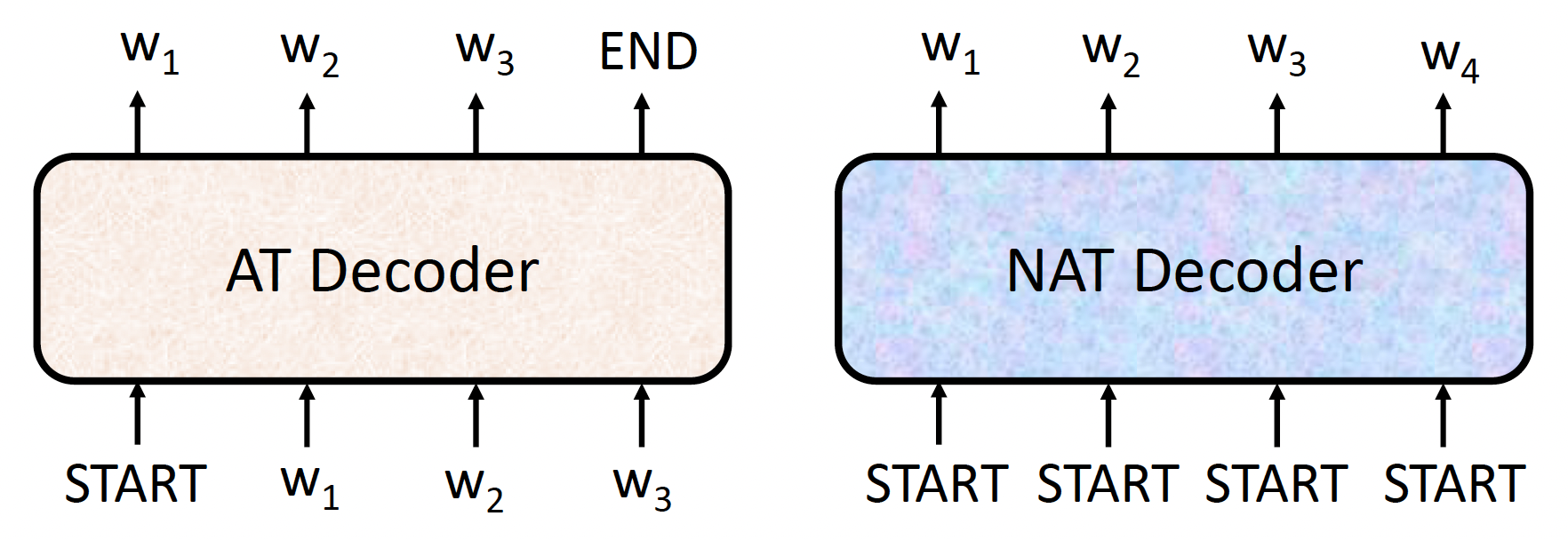
不同于 AT 解码器一次只吐一个输出,NAT 解码器可以一次性吐出所有输出;并且 NAT 接收的是输入都是 BEGIN 记号。
- 如何决定 NAT 解码器的输出长度
- 用一个预测器来决定
- 允许输出一个非常长的序列,但是忽略 END 记号后面的输出
- 优点:并行程度高,更易控制输出长度
- 但 NAT 通常不敌 AT(原因:多模态(multi-modality),这里不具体展开)
Encoder-Decoder⚓︎
接下来考虑前面被我们忽略掉的一个问题:编码器和解码器之间是如何传递数据的?这个结构就藏在前面被遮挡的解码器模块——交叉注意(cross attention) 中:
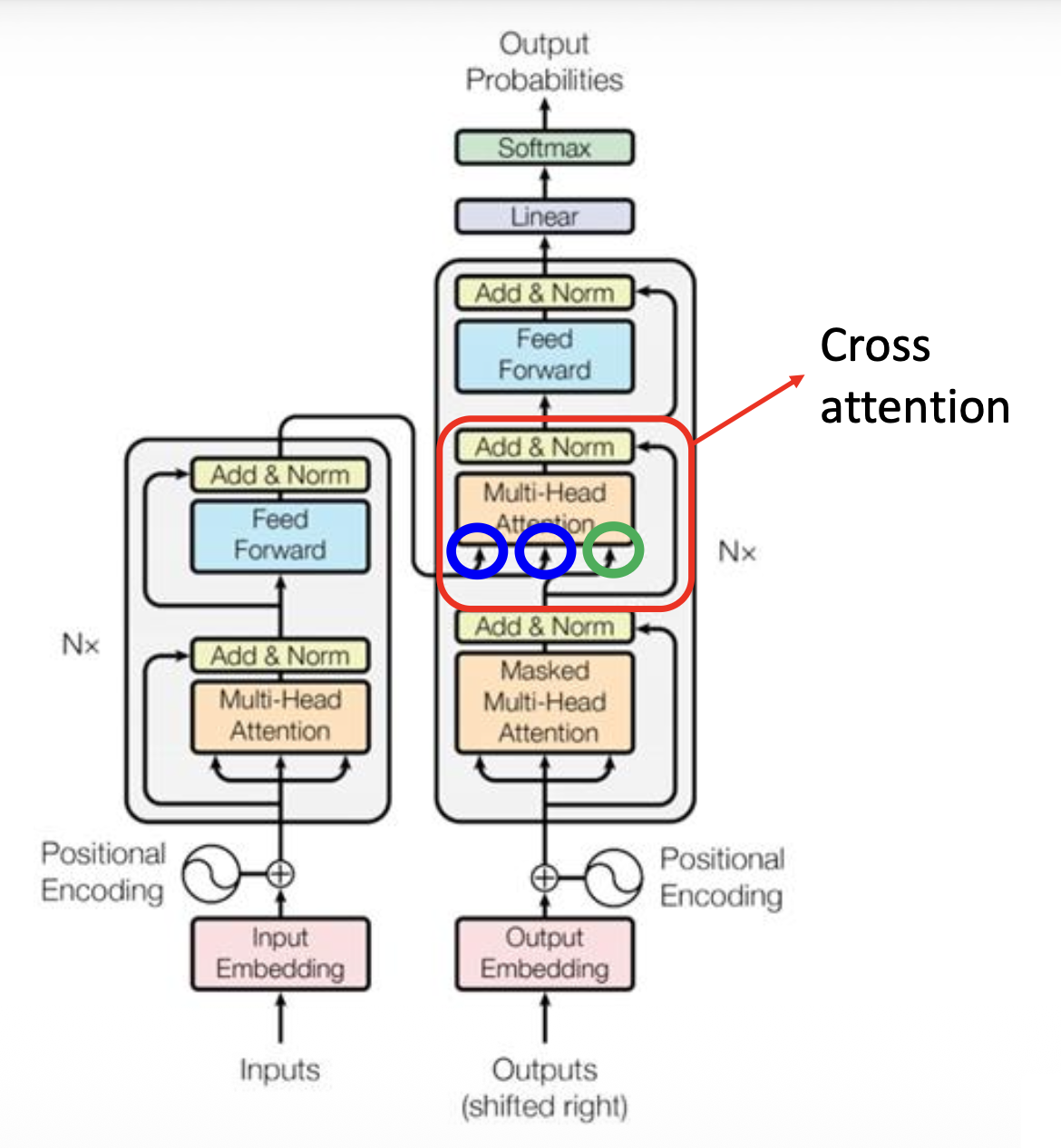
注意到该模块有 3 个输入,其中有 2 个输入来自编码器的输出(蓝圈表示
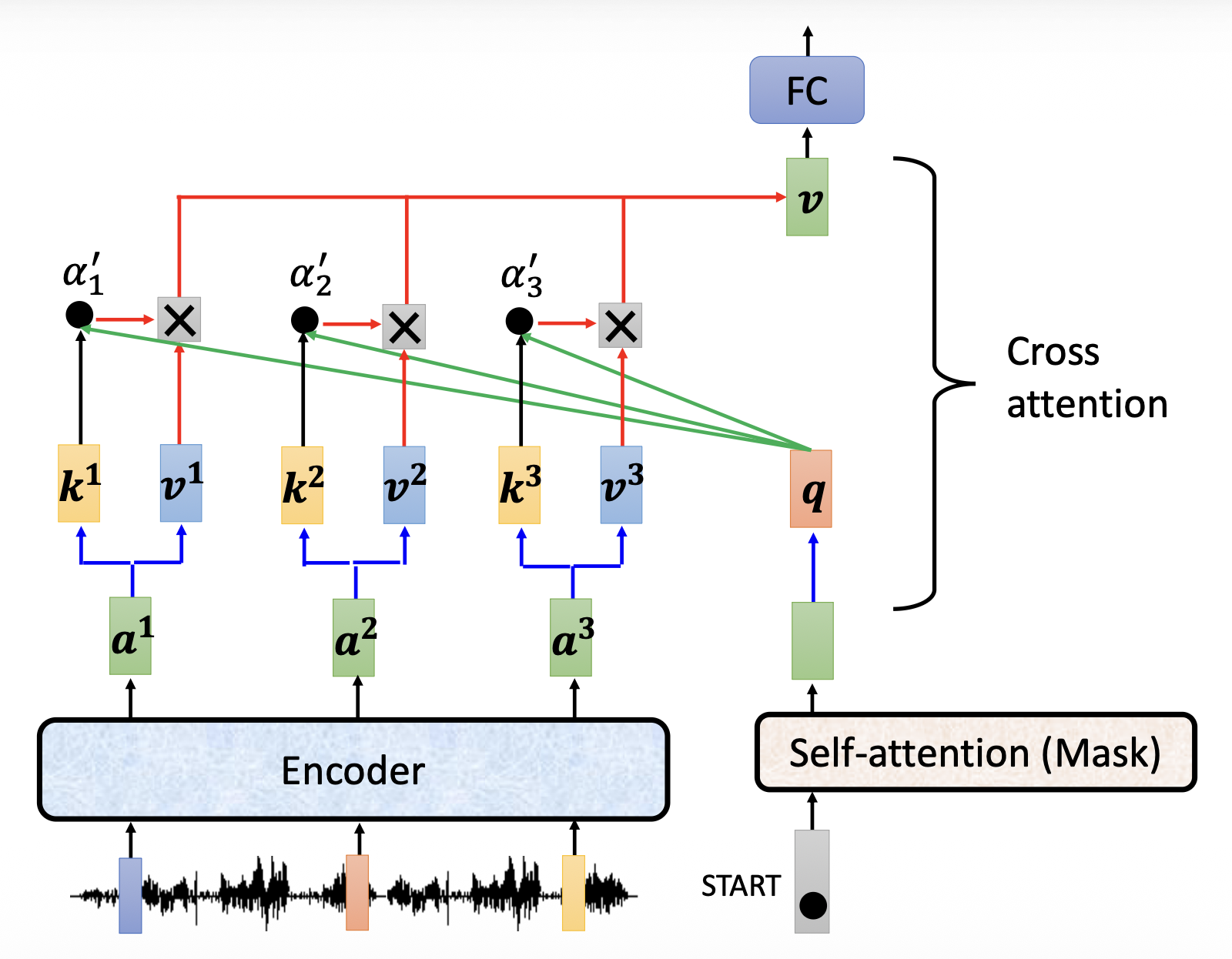
其实和一般的自注意很像,不同之处在于 \(\bm{k}, \bm{v}\) 和 \(\bm{q}\) 是来自两个不同的地方(这应该就是 cross 的含义
交叉注意的实际案例如下(注意:下图不来自于 Transformer
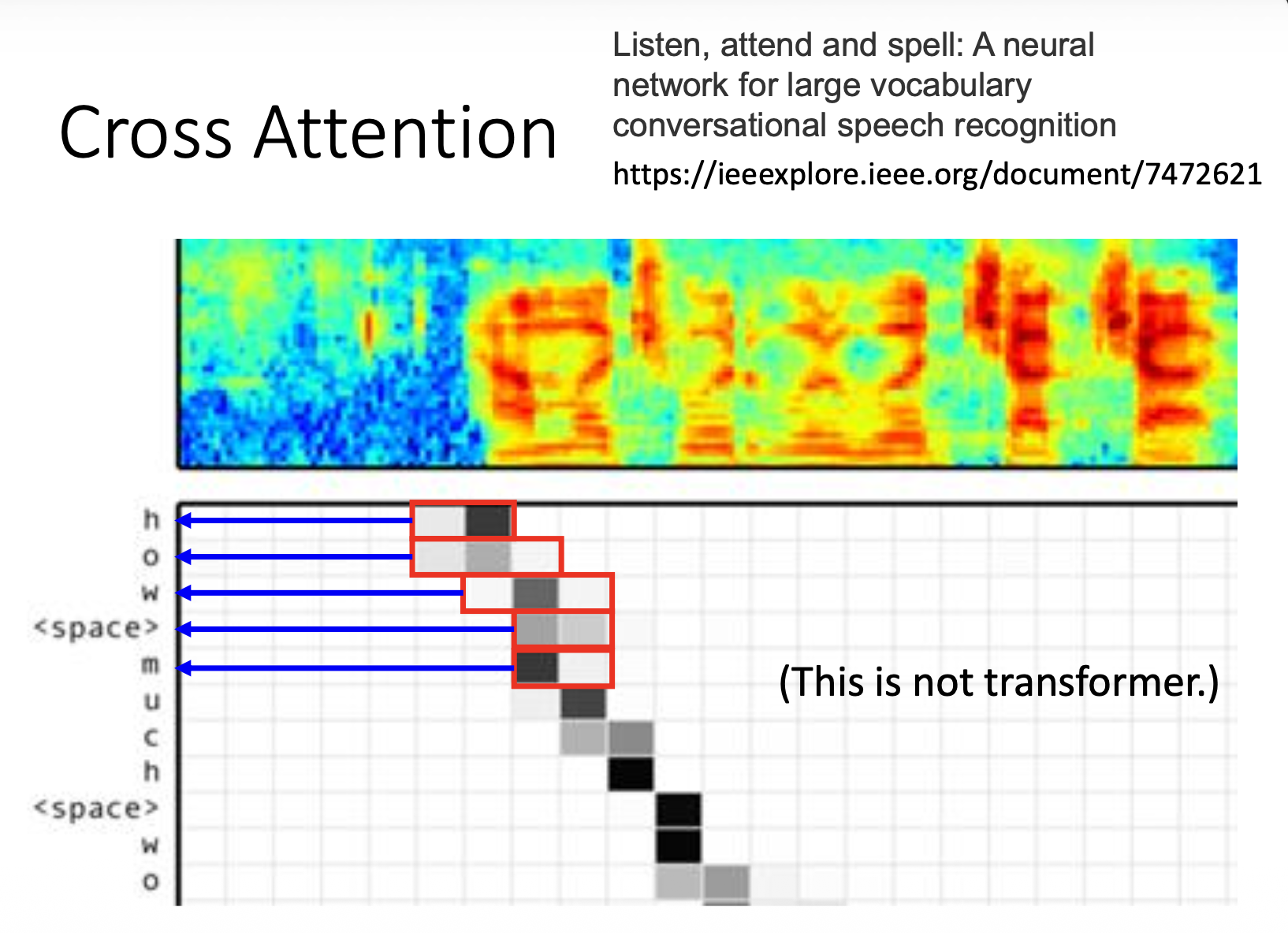
上图是编码器的输入(一列表示一个向量
) ,下图是解码器的输出
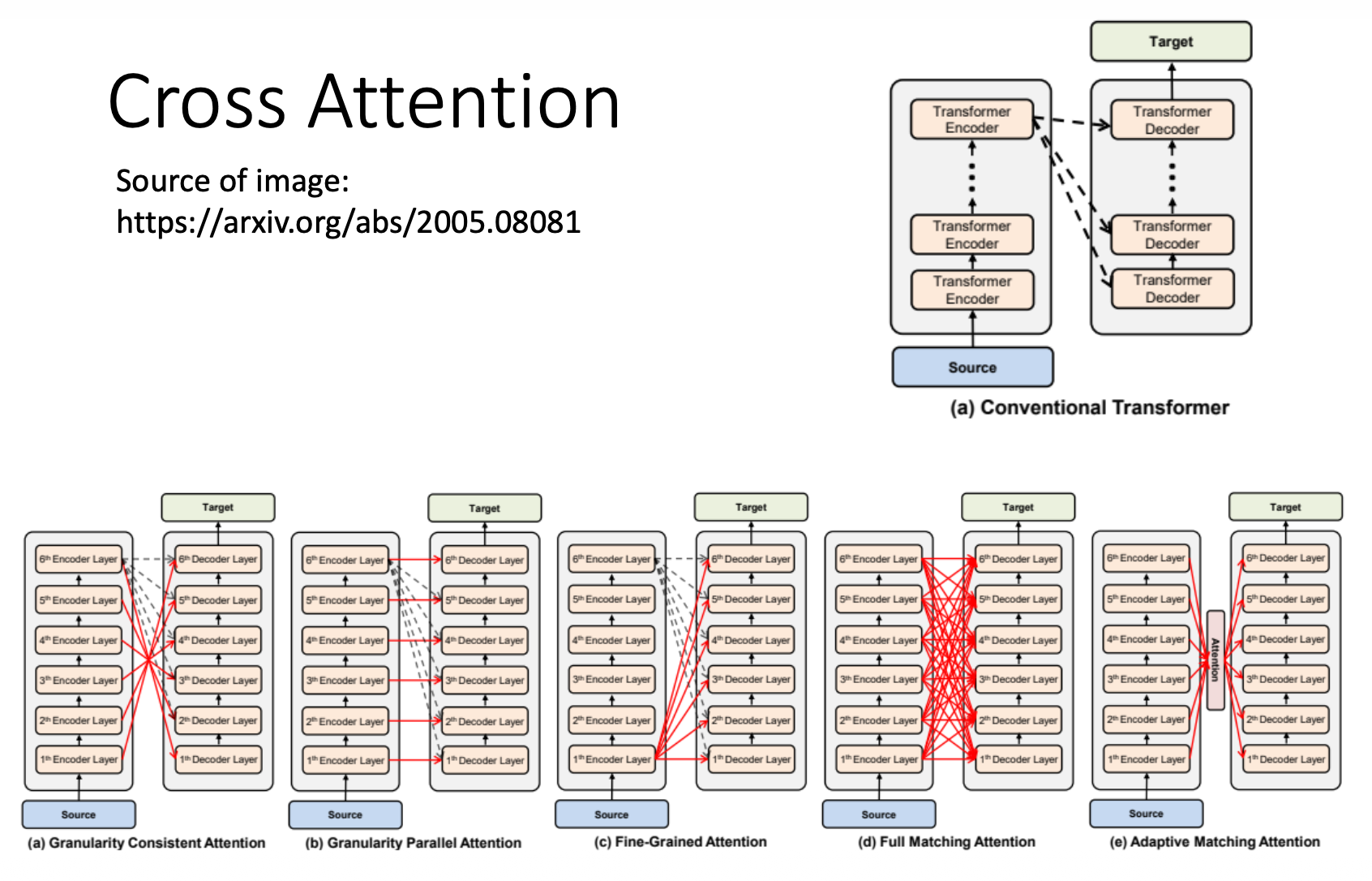
还有人研究了不同的交叉注意的效果:
Training⚓︎
前面只介绍了 Transformer 模型的运作机制(对应模型的测试(testing) 或推理(inference)
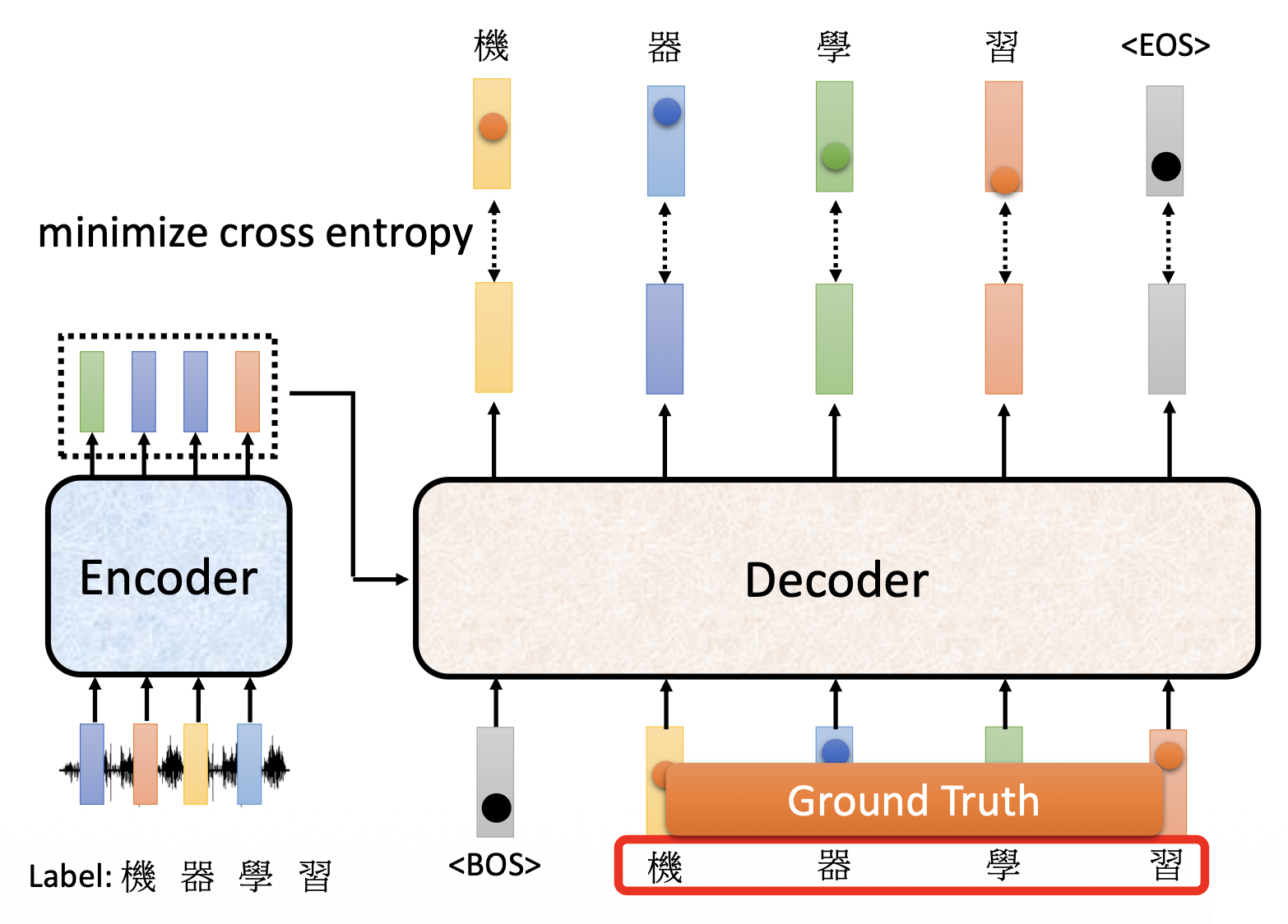
还是以“机器学习”这四个字的语音识别为例——
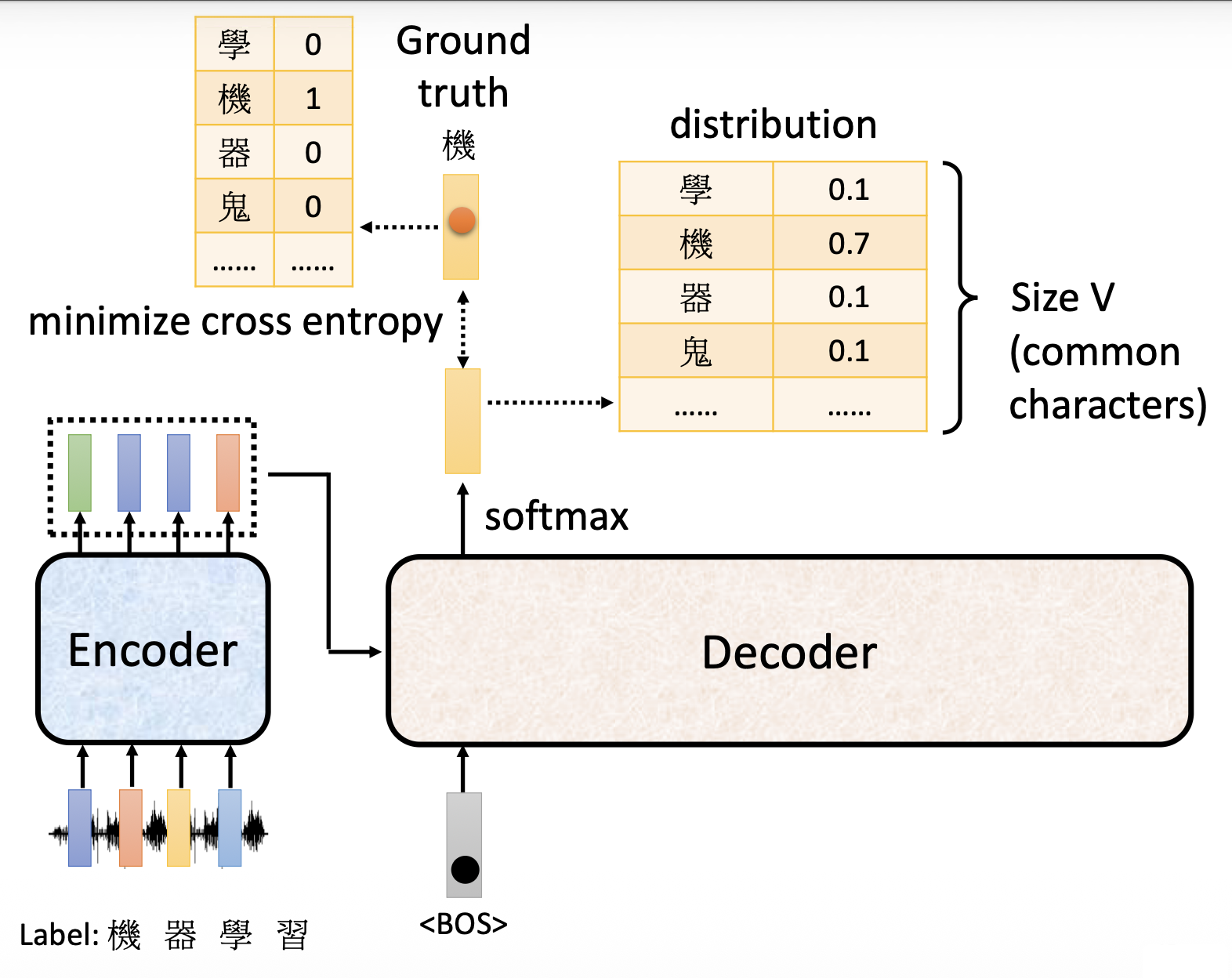
模型训练的目标就是让输出向量(概率分布)和基准事实(ground truth)(一种独热向量,就是标准答案)之间的差距越小越好。而这个差距就用交叉熵(cross entropy) 来量化(和分类差不多
常用的一种训练方法叫做教师强迫(teacher forcing)(好奇怪的术语
读者不难想到,这样的训练方法存在问题:测试的时候我们是让解码器读取前面的输出作为输入的,但训练的时候却读取基准事实,这中间就不太匹配。这个问题在后面会得到解决,先暂时放一下。
Tips⚓︎
注意
这里的 tips 不局限于 Transformer,其他的 seq2seq 模型同样适用。
Copy Mechanism⚓︎
一般我们要求解码器自己产生输出,但有时解码器没有必要自己创造输出,而是从输入中复制一部分内容作为输出,这便是复制机制(copy mechanism)。下面列出一些可以用到这种技术的场景:
例子
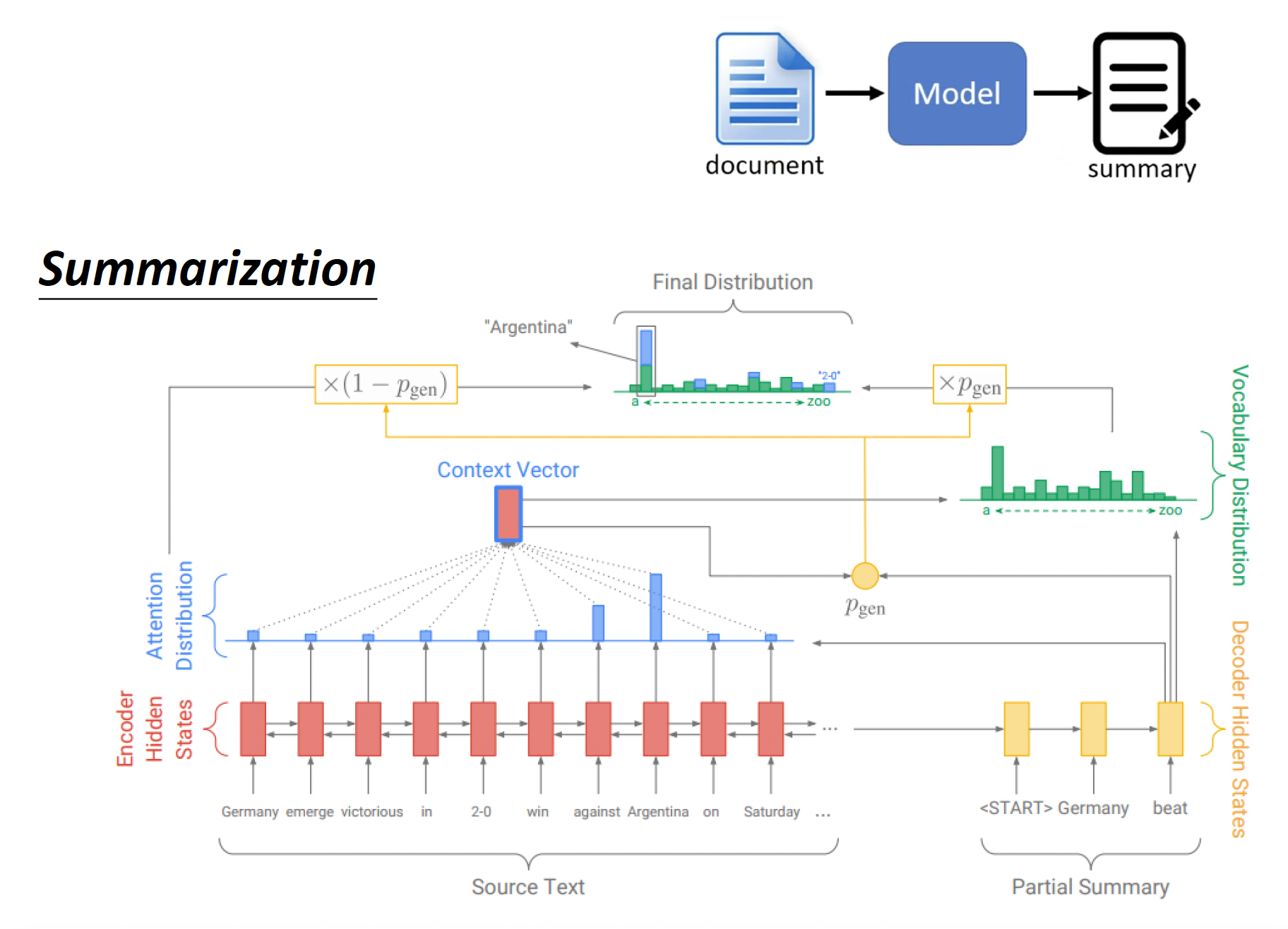
最早具备这种复制机制的模型是指针网络(pointer network),之后还有一种称为复制网络 (copy network) 的变体,这里就不展开介绍了。
Guided Attention⚓︎
问题
在语音合成时,可能会遇到以下古怪的问题:
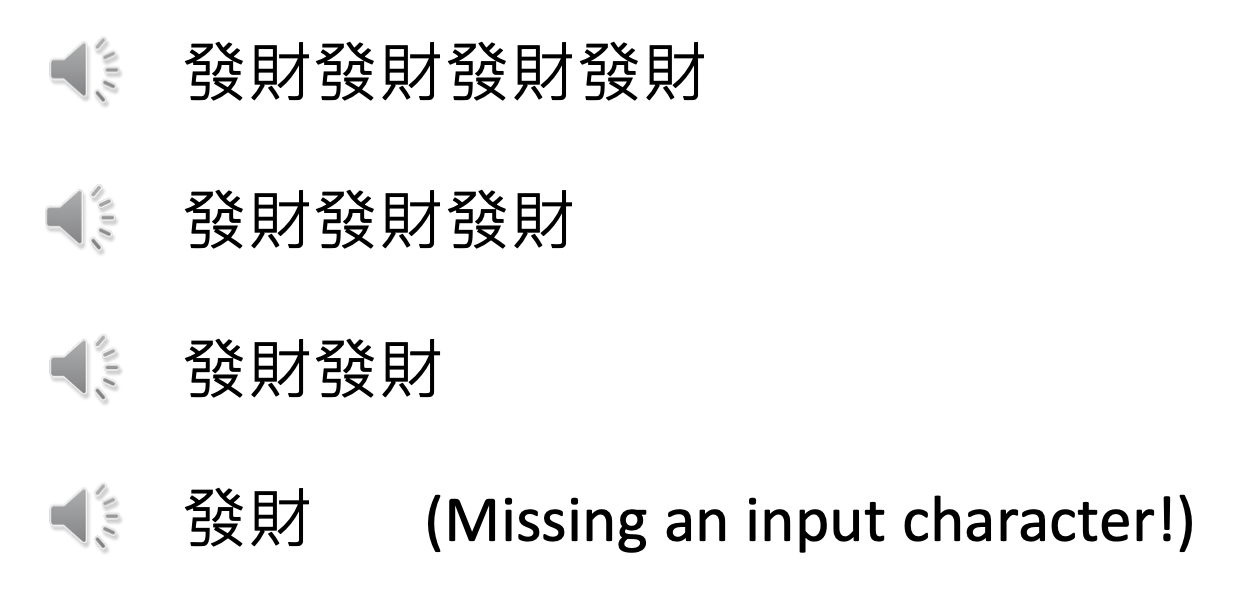
当机器连说多个“发财”的时候是正常的,但只说一个“发财”的时候,机器就只说了“财”没说“发”。这意味着模型可能漏掉了一个输入。
像语音合成、语音识别这样的任务,输入和输出都是单调对齐的 (monotonically aligned),就很有可能出现类似上面的问题。解决方案是一种被称为导向注意(guided attention) 的技术,强迫模型以固定的方式读取每一个输入。
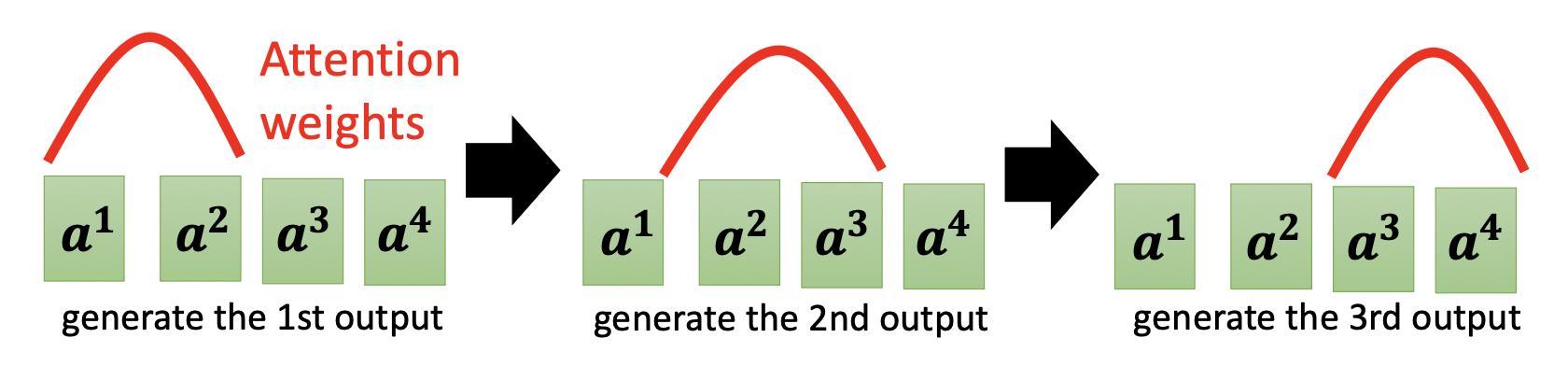
以语音合成为例,我们希望模型的输出顺序是从左向右的,所以在运行的时候会为模型提供一个注意权重(attention weight)(或者注意分数
如果不加这种约束,就很有可能出现这种乱序的情况,这显然是有问题的:
具体的导向注意应用有:
- 单调注意 (monotonic attention)
- 位置感知注意 (location-aware attention)
Beam Search⚓︎
注
假设解码器只有两个可能的输出 A 和 B。
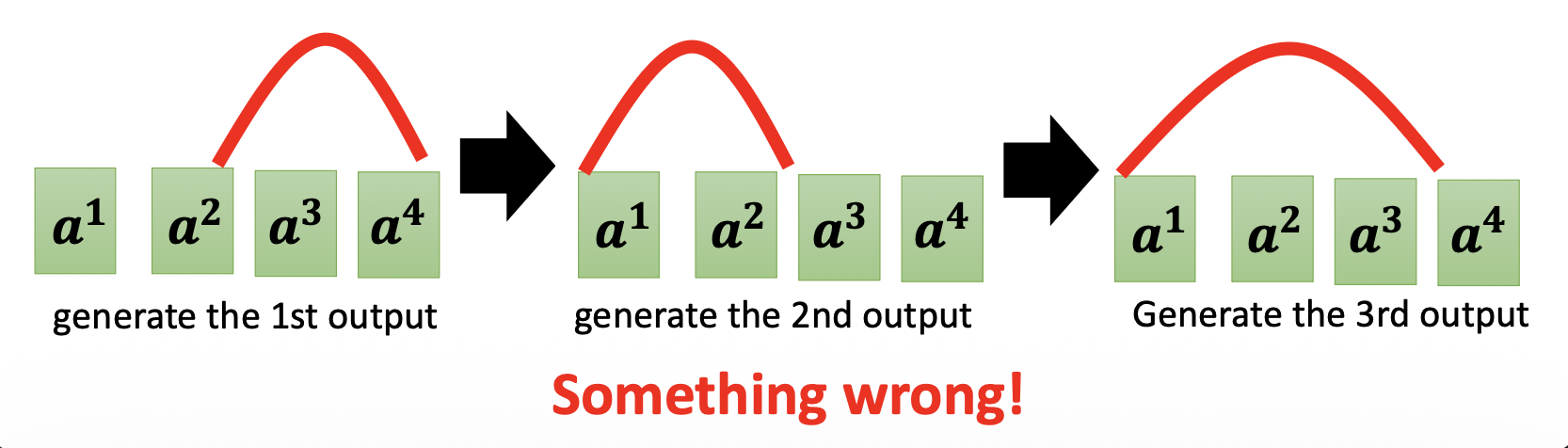
下面的树状图列出了模型所有可能的输出情况
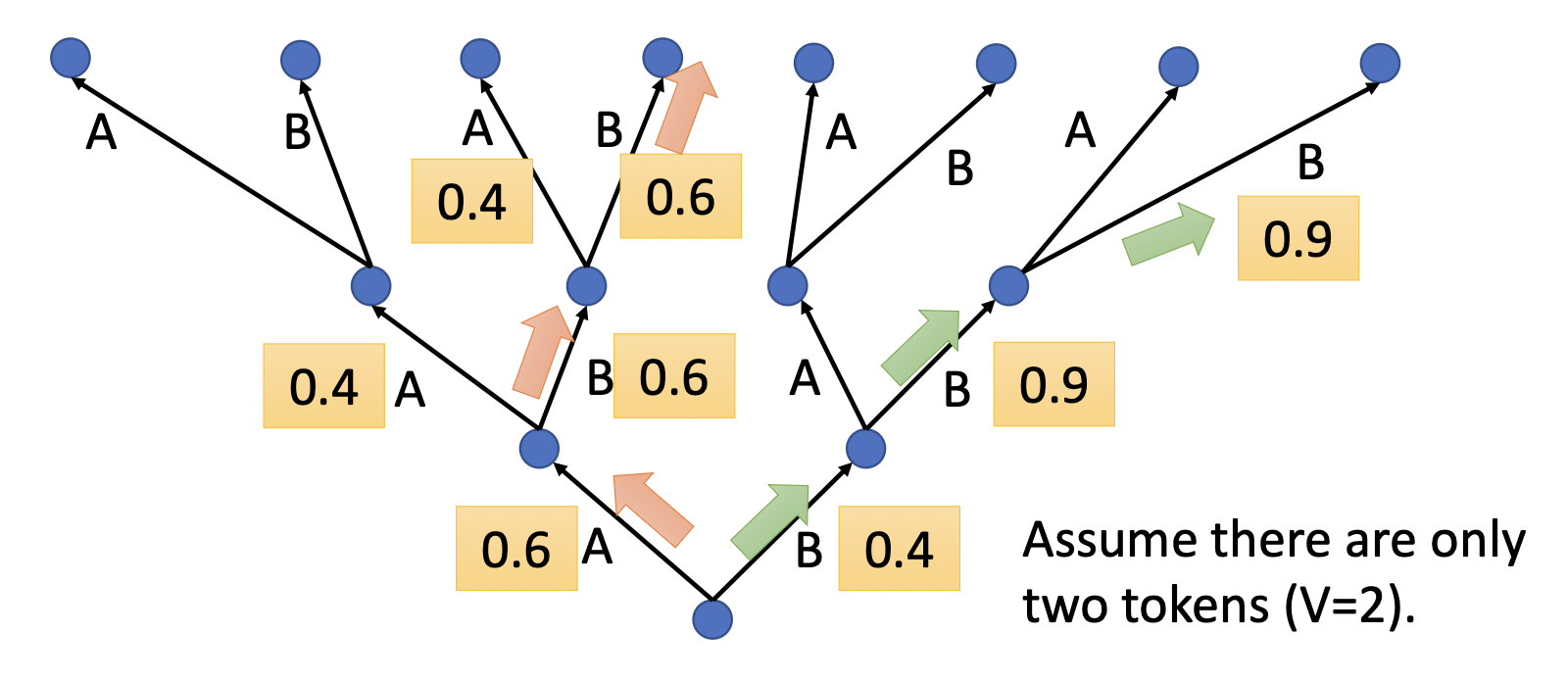
- 红色路径是贪心解码(greedy decoding)
- 绿色路径是最好的路径
要想找到最好的路径,最简单的做法是暴力搜索,把所有可能的路径遍历一遍。但路径树是可能输出数的指数,所以可能的输出数很多的时候,路径数就会变得特别大,显然是无法全部遍历一遍的。这时就要采用一种称为束搜索(beam search) 的近似算法,寻找近似解。一件有趣的事是,该算法有时得到不错的结果,有时结果会很烂。

比如这篇 paper,两张图分别展示了用了束搜索和没用的结果。可以看到前者会陷入一个死循环(蓝色部分
Optimizing Evaluation Metrics⚓︎
课程作业采用的评估标准是 BLEU score,它的做法是将解码器输出的完整句子和正确答案比较,也就是以句为单位做比较。但我们训练模型的时候是一个词一个词看的,分开来看每个词的交叉熵的。两者的关联不大,因此让交叉熵最小化不一定能提高 BLEU 分数。

那么怎样做优化呢?一个口诀是:如果不知道如何优化的话,那就用强化学习(RL) 解决!
Scheduled Sampling⚓︎
前面还放跑了一个问题:测试(左图)和训练(右图)结果的不匹配,这种现象称为暴露偏移(exposure bias)。由于测试的时候解码器读取的是之前的输出,假如之前的输出是错的,那么解码器就会根据这个错误的输入来接着输出,这样很有可能导致“一步错,步步错”的情况。
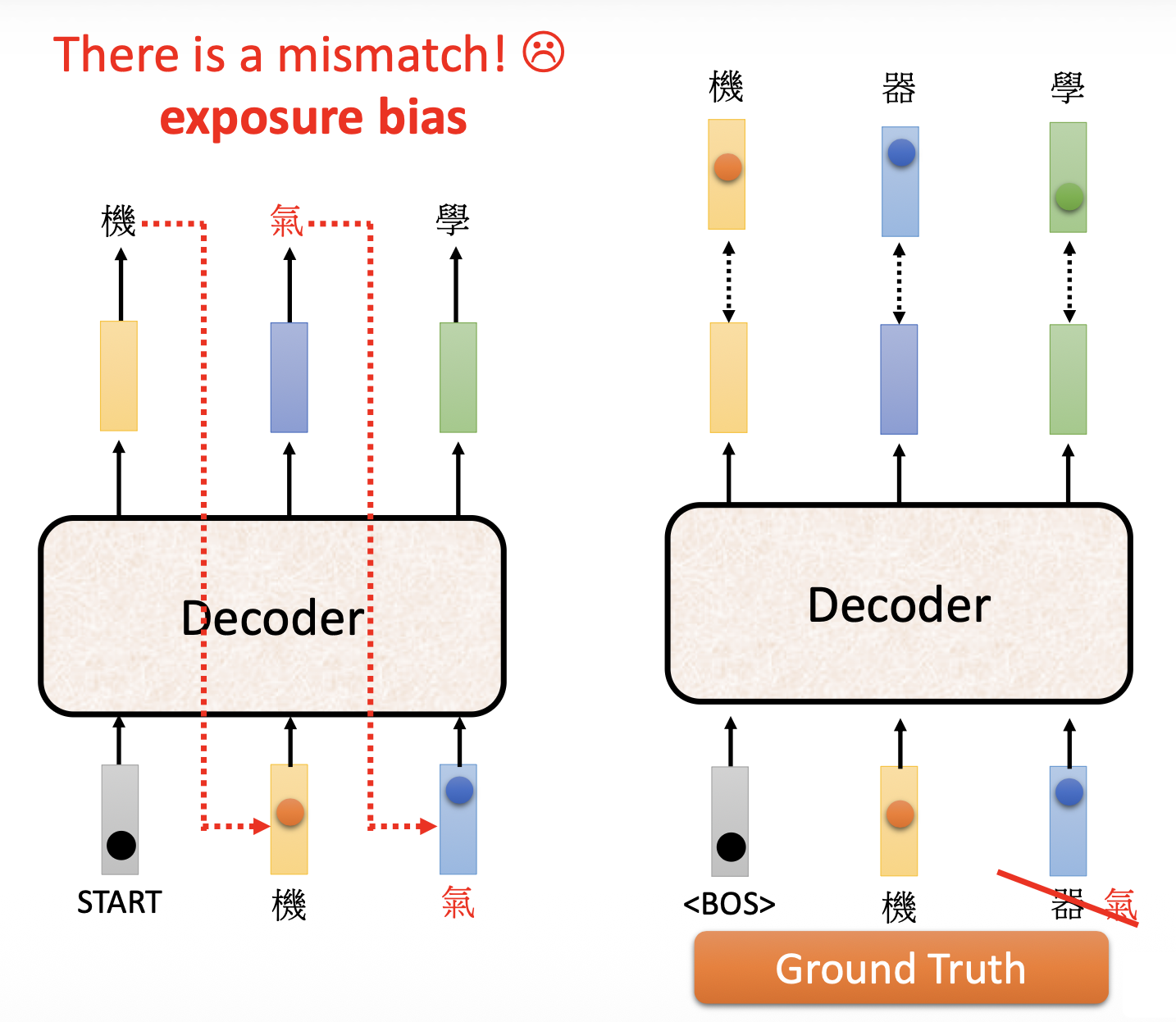
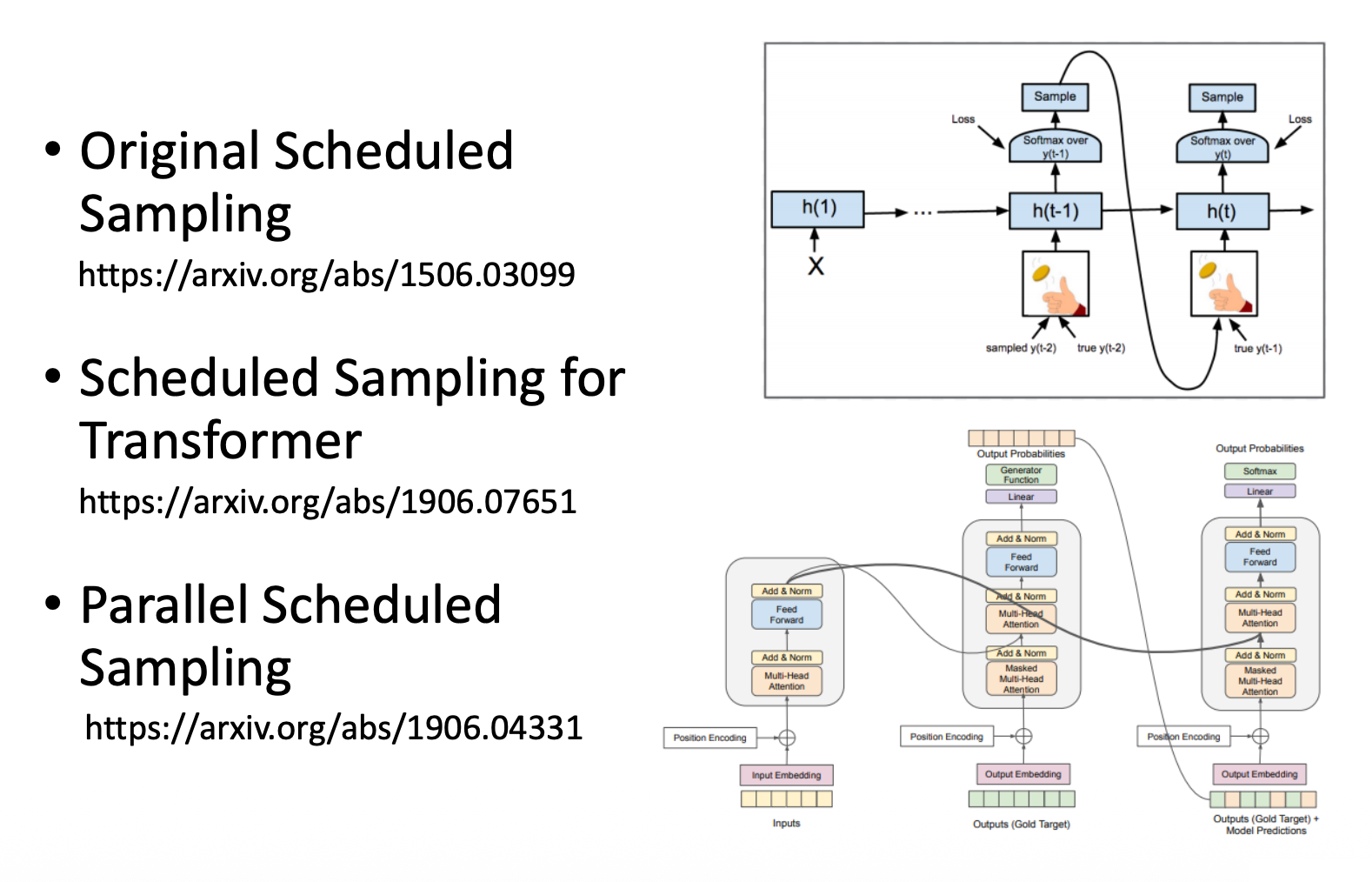
一种解决思路是:在训练的时候不要完全用基准事实,可以偶尔给一些错误的输入,这样反而模型会学的更好。这种技术称为调度采样(scheduled sampling)。
下面是一些有关该技术的参考资料,感兴趣的读者可自行到网上搜寻。
评论区