Lec 8: Dynamic Programming⚓︎
约 4984 个字 198 行代码 预计阅读时间 27 分钟
噩梦开始的地方 ...
背景知识:动态规划の诞生
Theory Background⚓︎
动态规划的概念:
动态规划(dynamic programming, DP)是一个重要的算法范式,它将一个问题分解为一系列更小的子问题,并通过存储子问题的解来避免重复计算,从而大幅提升时间效率
。 (摘自 Hello 算法)
动态规划的问题特性:
- 重叠子问题:动态规划的子问题是相互依赖的(而分治算法处理的是独立的子问题)
- 最优子结构:原问题的最优解是从子问题的最优解构建得来的
- 无后效性:给定一个确定的状态,它的未来发展只与当前状态有关,而与过去经历的所有状态无关(否则难以用动态规划解决)
满足上述特性的问题用动态规划解决较为合适。
动态规划的基本思想:
- 每个子问题仅解决一次,将得到的解存入一张表中(数组 / 散列表)
- 如果某个子问题需要其他子问题的解,可先查表,看是否已经求过解,若是则直接用,否则再计算
- “以空间换时间”——记忆化搜索
注:下面的理论部分建议在阅读完 Examples 一节的前 4 个例子后再来阅读,这样理解会更深刻些。
 动态规划的解题步骤
动态规划的解题步骤
- 用符号化或数学化的语言描述问题的一个最优解,即定义状态
- 可能是最难的部分
- 这里之所以强调“一个”,是因为一个问题可能有多个最优解
- 递归地定义最优解的值
- 得到一个递推关系式(或者称为状态转移方程
) 、base case 和其他边界条件
- 得到一个递推关系式(或者称为状态转移方程
- 确定好计算的顺序
- 自底向上 / 自顶向下
- 迭代计算,得到一张状态表
- (可选)重构解决问题的策略
- 有些题目可能要求画出最优解情况的方案,比如画出一棵树或一条路径等,这就需要我们在计算最优解的时候时刻记录计算的过程
注
虽然在大多数情况下我们都是用迭代来实现动态规划的,但是实际上也是可以用递归来做的:
- 将递归计算的结果存在一个数组或散列表中
- 自顶向下计算,如果表中没有对应的计算结果,就需要根据状态转移方程递归向下求;若表中有对应结果,则直接返回该结果
陷阱
如果一个问题能用动态规划解决,并不意味着它一定能在多项式时间内被算出来。
Examples⚓︎
Climbing Stairs Problem⚓︎
问题描述
楼底和楼顶之间有 n 段台阶,每步可以上 1 个或 2 个台阶,请问有多少种爬到楼顶的方法。
- 假如我们现在站在第 i 个台阶上,因为每步可以上 1 个或 2 个台阶,所以在上一步我们应该站在第 i-1 或第 i-2 个台阶上
- 令爬到第 i 个台阶的方案树为 \(F_i\),那么很自然地,我们得到了一个递推关系式:\(F_i = F_{i - 1} + F_{i - 2}\)
- 不难发现,这是一个斐波那契数列,因此我们可以采用 FDS 介绍的暴力搜索算法来解决这一问题
然而,也是在 FDS 中,我们已经分析过,这种算法(实际上是递归算法)的时间复杂度是指数级的,有点吓人。之所以速度如此之慢,原因在于几乎所有的子问题都被重复计算了很多次,产生了大量的冗余计算。正在学习 ADS 的我们是时候拿出更高级的算法——动态规划来优化一下了:
- 根据递推关系,要得到 \(F_N\),只需知道 \(F_{N-1}\) 和 \(F_{N-2}\) 的值
- 那么我们可以在计算过程中仅保留这两个值,即上一次和上上次计算的结果,将它们相加即可得到本次计算的结果,无需存储所有 \(F_i\) 的值(空间复杂度 \(O(N) \rightarrow O(1)\))
- 然后更新上一次和上上次的值,进入下一轮的计算(\(F(N+1)\))
- 所以这种方法是自底向上计算的,而递归算法是自顶向下计算的
代码实现
int Fibonacci(int N) {
int i, Last, NextToLast, Answer;
if (N <= 1)
return 1;
Last = NextToLast = 1; // F(0) = F(1) = 1
for (i = 2; i <= N; i++) {
Answer = Last + NextToLast; // F(i) = F(i - 1) + F(i - 2)
NextToLast = Last; // update F(i - 1) and F(i - 2)
Last = Answer;
} // end-for
return Answer;
}
时间复杂度:\(T(N) = O(N)\)
Ordering Matrix Multiplications⚓︎
问题描述
对于多个矩阵的乘法,乘法的顺序相当关键,如果顺序选择不当,会让计算次数变得相当多。
例子
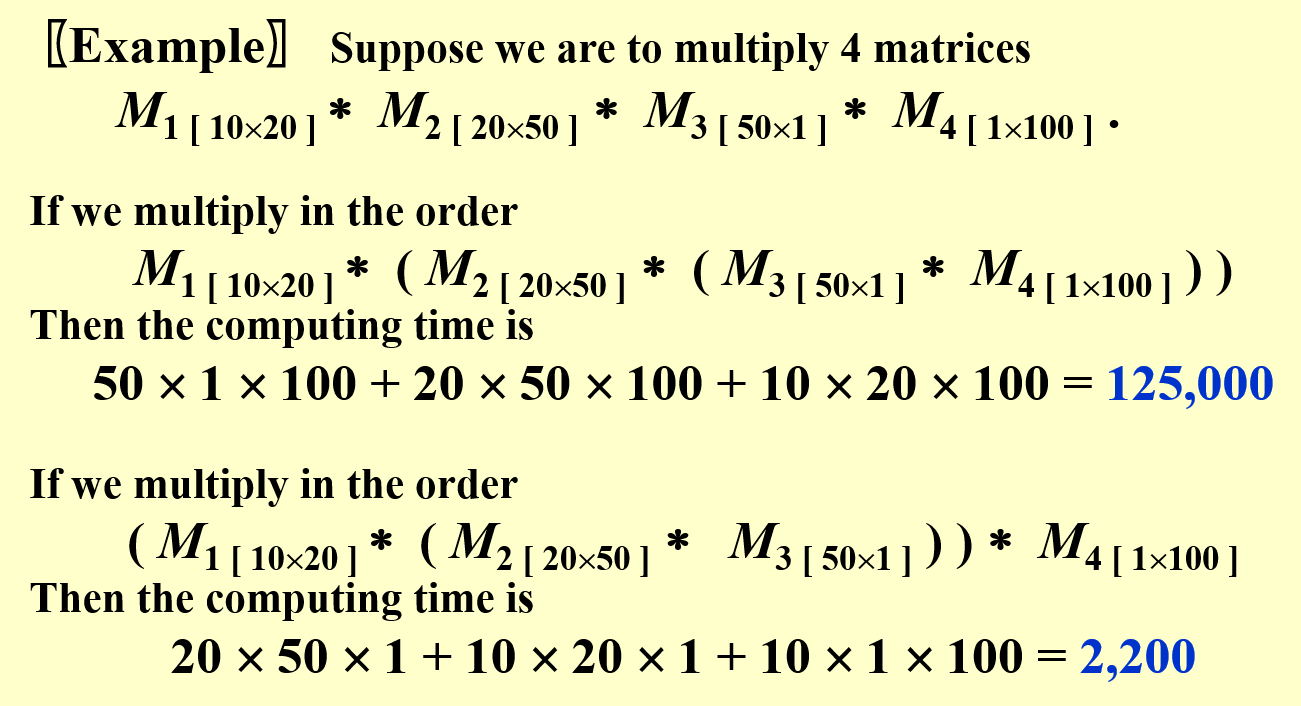
对于一个给定的多矩阵乘法,请找出最优的乘法顺序。
Bad idea:穷举法
令 \(b_n\) 的值为计算矩阵乘法 \(\mathbf{M}_1 \cdot \mathbf{M}_2 \cdot \dots \cdot \mathbf{M}_n\) 的顺序数。易知前几项为 \(b_2 = 1, b_3 = 2, b_4 = 5, \dots\)。
再令 \(\mathbf{M}_{ij} = \mathbf{M}_i \cdot \dots \cdot \mathbf{M}_j\),那么 \(\mathbf{M}_{1n} = \mathbf{M}_1 \cdot \dots \cdot \mathbf{M}_n = \mathbf{M}_{1i} \cdot \mathbf{M}_{i+1\ n}\)。
如果令 \(b_n = \mathbf{M}_{1n}\) 的乘法顺序数,\(b_i = \mathbf{M}_{1i}\) 的乘法顺序数,\(b_{n - i} = \mathbf{M}_{i + 1\ n}\) 的乘法顺序数,不难想到 \(b_n = \sum\limits_{i = 1}^{n - 1}b_i b_{n - i}\),其中 \(n > 1\) 且 \(b_1 = 1\)。
经计算,\(b_n = O(\dfrac{4^n}{n\sqrt{n}})\),且 \(b_n\) 是一个卡特兰数 (Catalan number),时间复杂度如此之大,因而想要实现穷举就不太现实了。
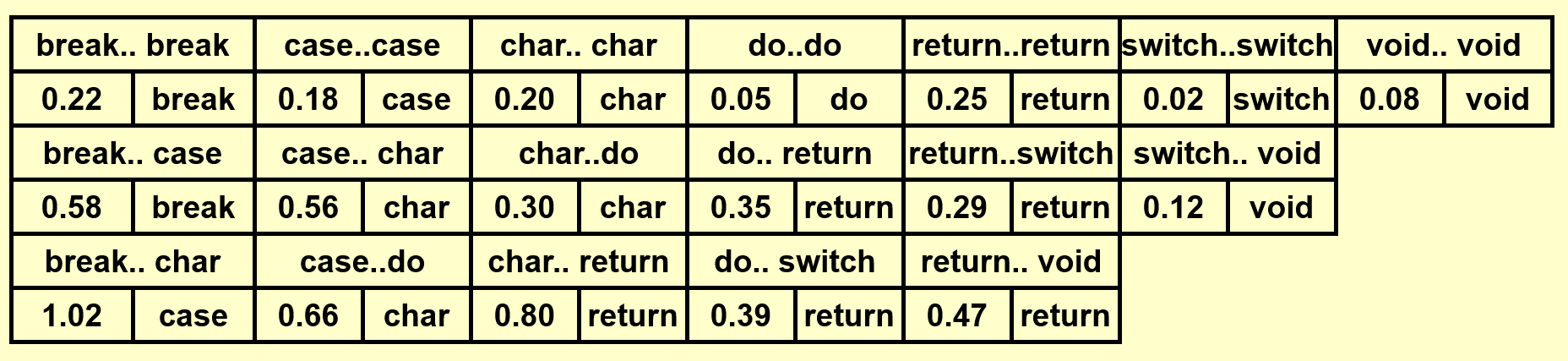
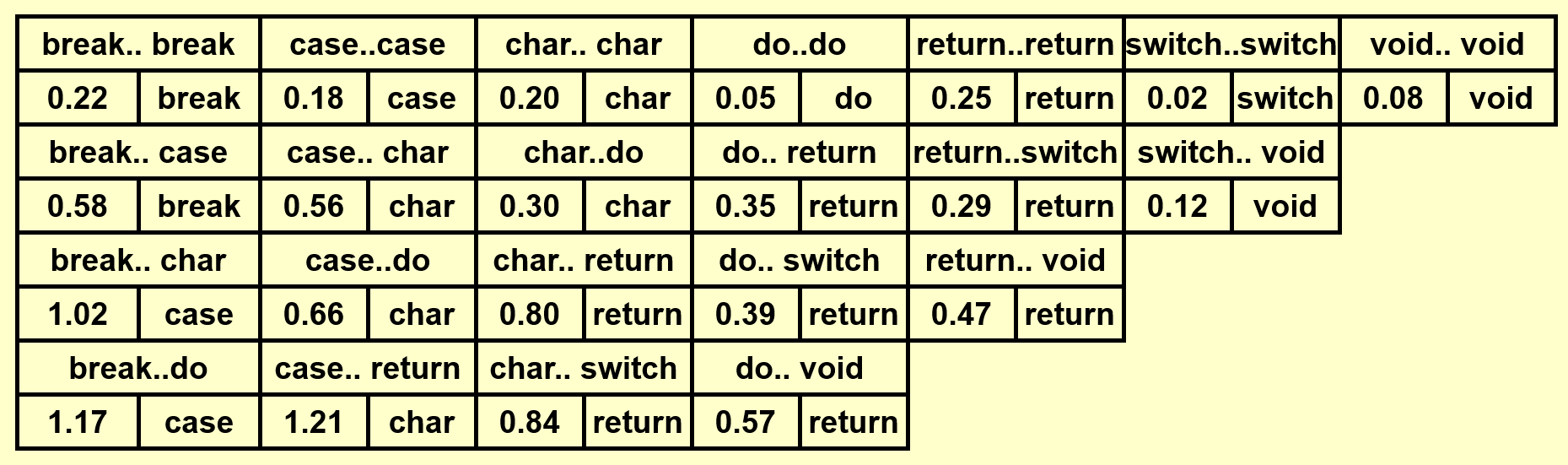
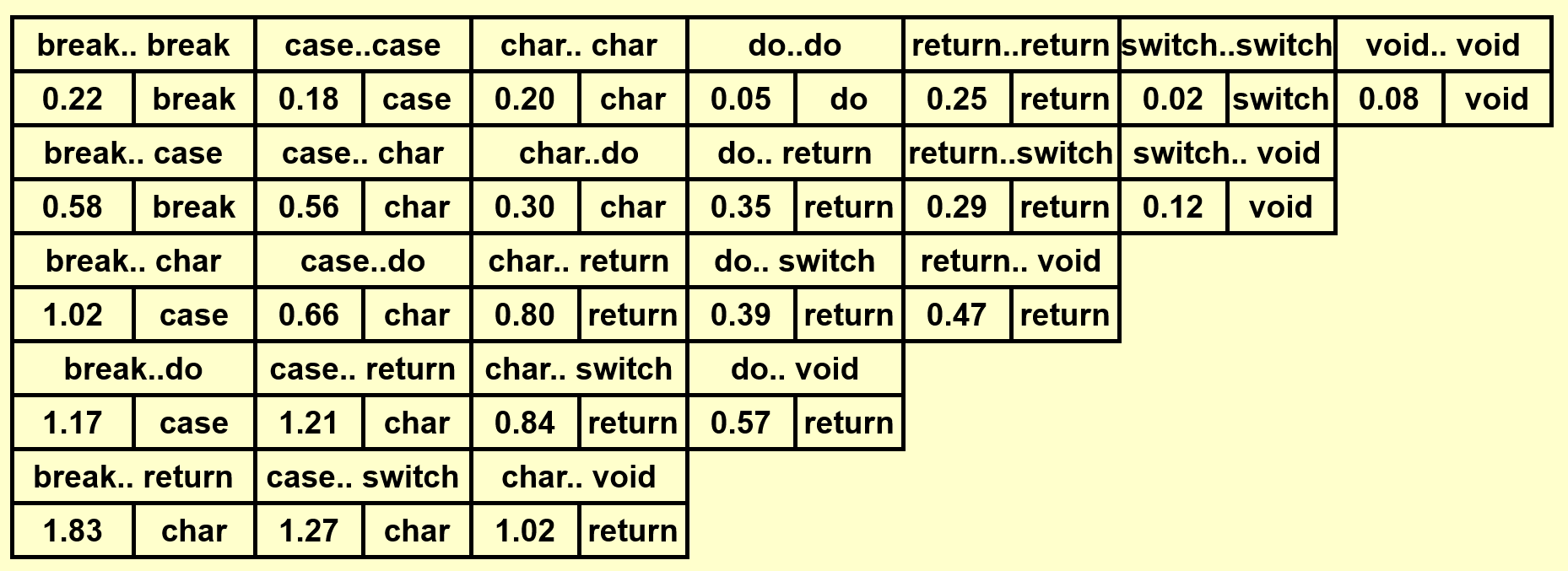
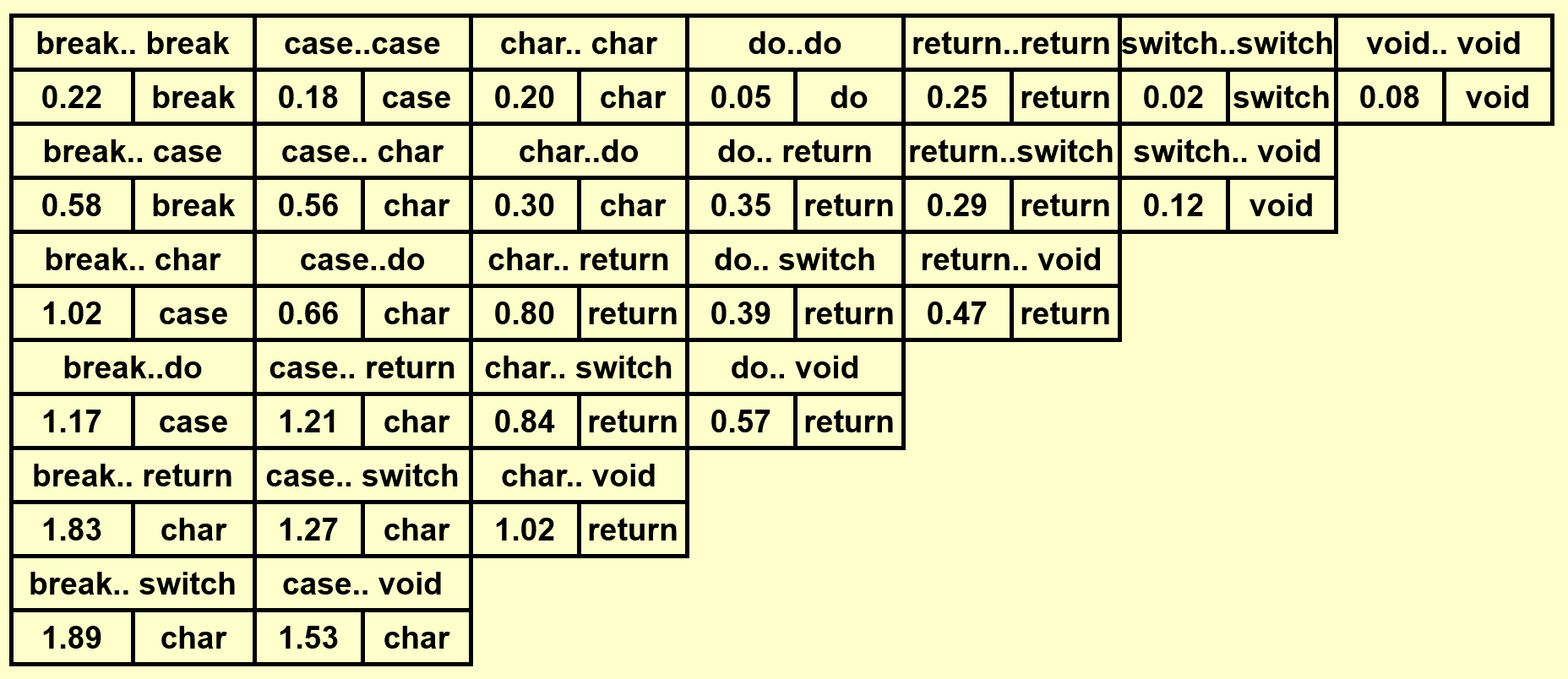
假设我们计算 \(n\) 个矩阵的乘法 \(\mathbf{M}_1 \cdot \dots \cdot \mathbf{M}_n\),其中 \(\mathbf{M}_i\) 是一个规模为 \(r_{i-1} \times r_i\) 的矩阵。令计算矩阵乘法 \(\mathbf{M}_i \cdot \dots \cdot \mathbf{M}_j\) 的最优成本为 \(m_{ij}\),那么我们可以得到以下递推关系式:
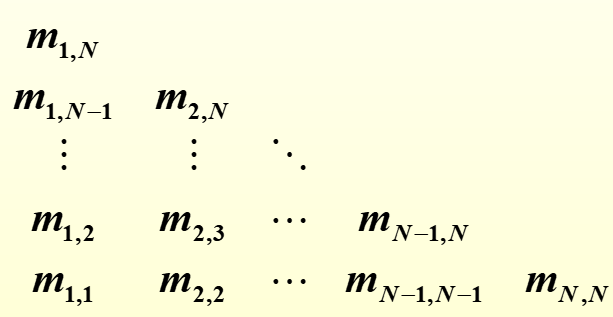
- 我们需要计算的 \(m_{ij}\) 有 \(O(N^2)\) 个(\(i, j\) 的范围在 \([1, n]\) 之间)
- 根据递推关系式,某个子问题的解一定来自比该子问题规模更小的子问题的解中。因此为了节省计算次数,我们还是自底向上计算:先算最小规模(即 \(i = j\) 时)的 \(m_{ij}\),再计算更大规模的 \(m_{ij}\),这样规模较大的子问题可以利用规模较小的子问题的解直接计算,而无需重复计算更小规模的子问题
- 在计算过程中,我们保存了一张形如下三角矩阵的表:
代码实现
// r contains numbers of columns for each of the N matrices
// r[0] is the number of rows in matrix 1
// Minimum number of multiplications is left in M[1][N]
void OptMatrix(const long r[], int N, TwoDimArray) {
int i, j, l, L;
long ThisM;
for (i = 1; i <= N; i++)
M[i][i] = 0;
for (k = 1; k < N; k++) // k = j - i
for (i = 1; i <= N - k; i++) { // For each position
j = i + k;
M[i][j] = Infinity;
for (L = i; L < j; L++) {
ThisM = M[i][L] + M[L + 1][j] + r[i - 1] * r[L] * r[j];
if (ThisM < M[i][j]) // Update min
M[i][j] = ThisM;
} // end for-L
} // end for-Left
}
- 循环顺序一定是先循环
k再循环i,因为如果先循环i,当i很小,k很大时,j的取值也可以很大,那么在计算M[i][j]时,M[L + 1][j]这项还没有算出来(L + 1 > i) ,因此无法得到正确结果。 - 可以看到这个函数只是计算了 n 个矩阵的乘法的最小计算次数,并没有保存乘法的顺序。感兴趣的读者可以尝试着在该代码的基础上增添这个功能,从而最终实现一个完整的矩阵乘法的程序。
改进版
// Compute optimal ordering of matrix multiplication
// c contains number of columns for each of the n matrices
// c[0] is the number of rows in matrix 1
// Minimum number of multiplications is left in M[1][n]
// Actual ordering can be computed via
// another procedure using last_change
// M and last_change are indexed starting at 1, instead of zero
void opt_matrix(int c[], unsigned int n, two_d_array M, two_d_array last_change) {
int i, k, Left, Right, this_M;
for (Left = 1; Left <= n; Left++)
M[Left][Left] = 0;
for (k = 1; k < n; k++) // k is Right-Left
for (Left = 1; Left <= n - k; Left++) { // for each position
Right = Left + k;
M[Left][Right] = INT_MAX;
for (i = Left; i < Right; i++) {
this_M = M[Left][i] + M[i+1][Right]
+ c[Left-1] * c[i] * c[Right];
if(this_M < M[Left][Right]) { // Update min
M[Left][Right] = this_M;
last_change[Left][Right] = i;
}
}
}
}
时间复杂度:\(T(N) = O(N^3)\)
Optimal Binary Search Trees⚓︎
最优二叉查找树(optimal binary search trees, OBST):一种在二叉查找树上完成静态查找 (static search)(即没有插入和删除操作)操作的最优方法。
问题描述
给定 \(N\) 个单词,满足词典序 \(w_1 < w_2 < \dots < w_N\),且每个词 \(w_i\) 出现的概率(以下称为“词频”)为 \(p_i\)。现在要求将这些词排列在一个二叉查找树上,使得所有单词的预期查找时间(\(T(N) = \sum\limits_{i=1}^N p_i \cdot (1 + d_i)\),其中 \(d_i\) 为 \(w_i\) 在树中的深度)尽可能小,即构造一棵 OBST。
例子
这里分别给出用贪心算法、红黑树和 OBST 的方法构建出来的二叉查找树,以及对应的 \(T(N)\):
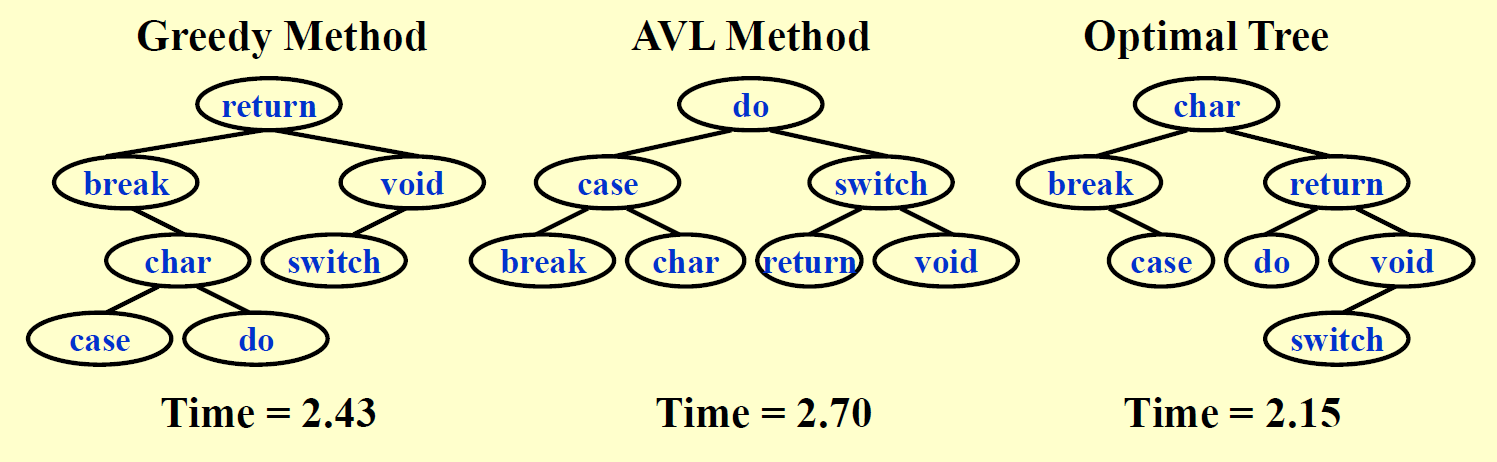
- 贪心算法之所以慢,是因为它优先考虑词频最大的单词,如果有多个高词频的单词,那么某些高词频的单词可能会被放在很深的地方,从而增大了总的查找时间。
- 红黑树之所以慢,是因为它在构建树的过程中仅考虑了黑高(即维护整棵树的平衡
) ,压根没有考虑词频的问题,所以可以看到虽然整棵树挺平衡的,但词频最大的那几个词全在深度最深的地方,使得总查找时间变的很大。
构造 OBST 的解法与计算矩阵乘法的最优顺序类似。先令:
- \(T_{ij}\):由单词 \(w_i \dots w_j(i < j)\) 构成的 OBST
- \(c_{ij}\):\(T_{ij}\) 的成本(\(c_{ii} = p_i\),PPT 上的是错的)
- \(r_{ij}\):\(T_{ij}\) 的根节点
- \(w_{ij}\):\(T_{ij}\) 的权重,等于 \(\sum\limits_{k = i}^j p_k\)(\(w_{ii} = p_i\))
如果令 \(w_k = r_{ij}\),那么 \(T_{ij}\) 的结构如下所示:
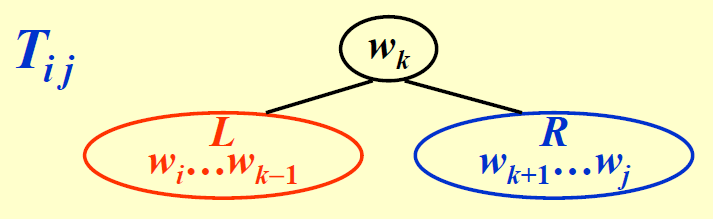
对于这棵树,它的成本为:
若 \(T_{ij}\) 是最优的,那么需要满足 \(c_{ij} = w_{ij} + \min\limits_{i < l \le j}\{c_{i, l - 1} + c_{l + 1, j}\}\)
例子
基于上面的那个例子,下面演示如何构建一棵 OBST(这里还是依据自底向上的思想来计算的

动画演示
这里只是简单地罗列结果,建议读者先自己动手画一下,然后再来与下面的结果比对。


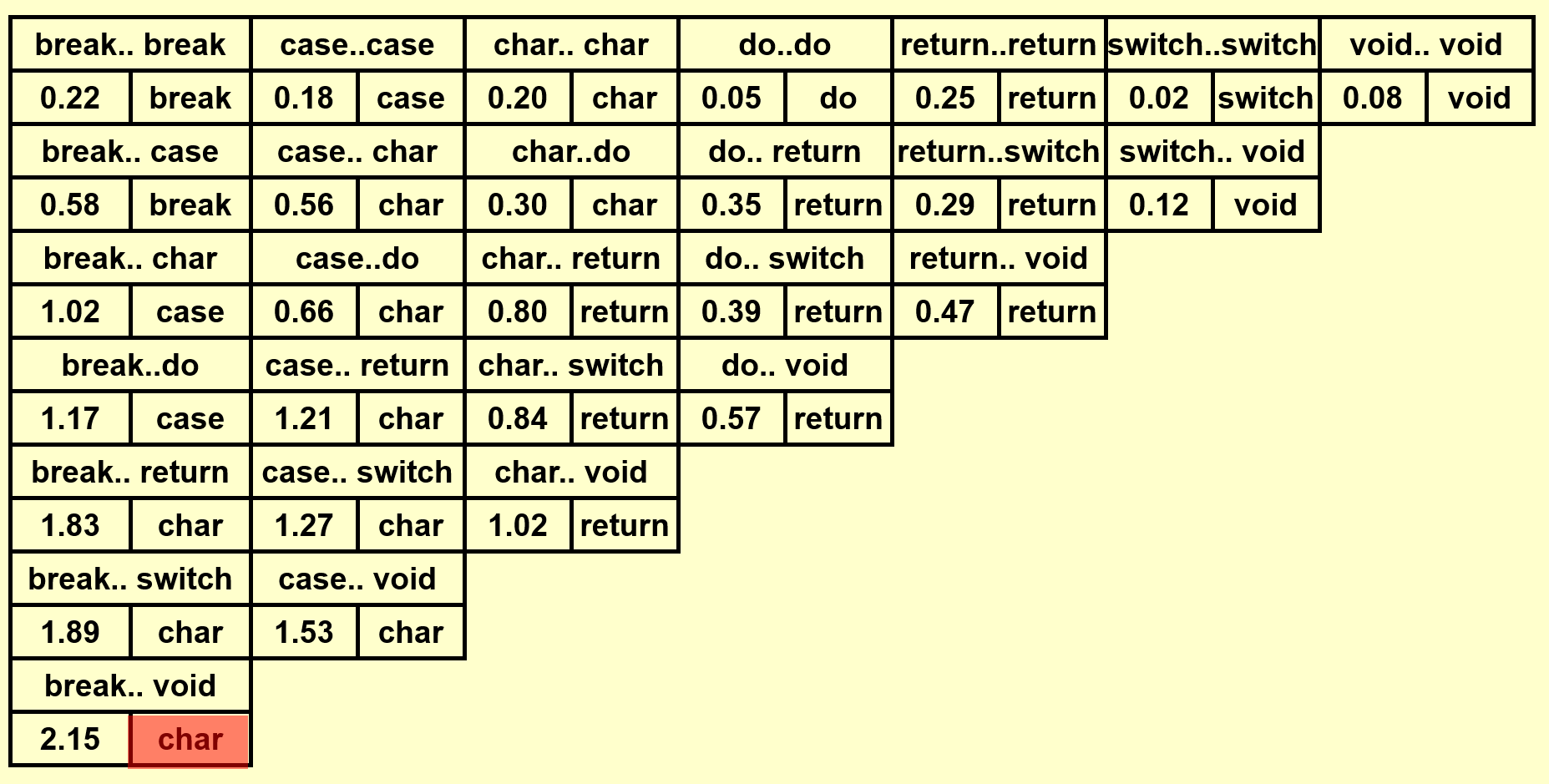
- 得到完整的表后,先将位于表格最后一行的单词插入树内,作为根节点
- 根据词典序将剩余的单词划分为左右两半,按照中序遍历的顺序逐一插入
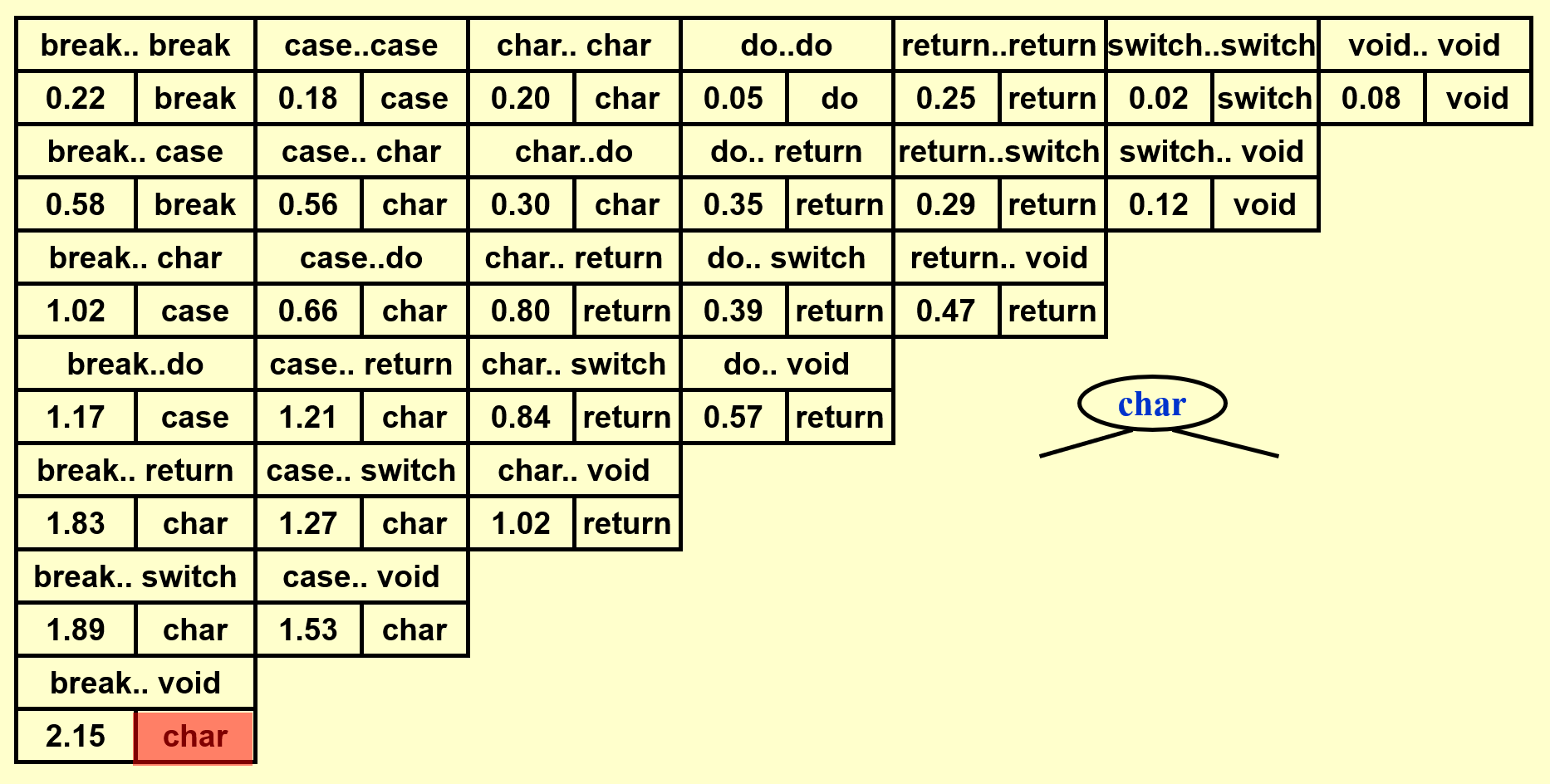
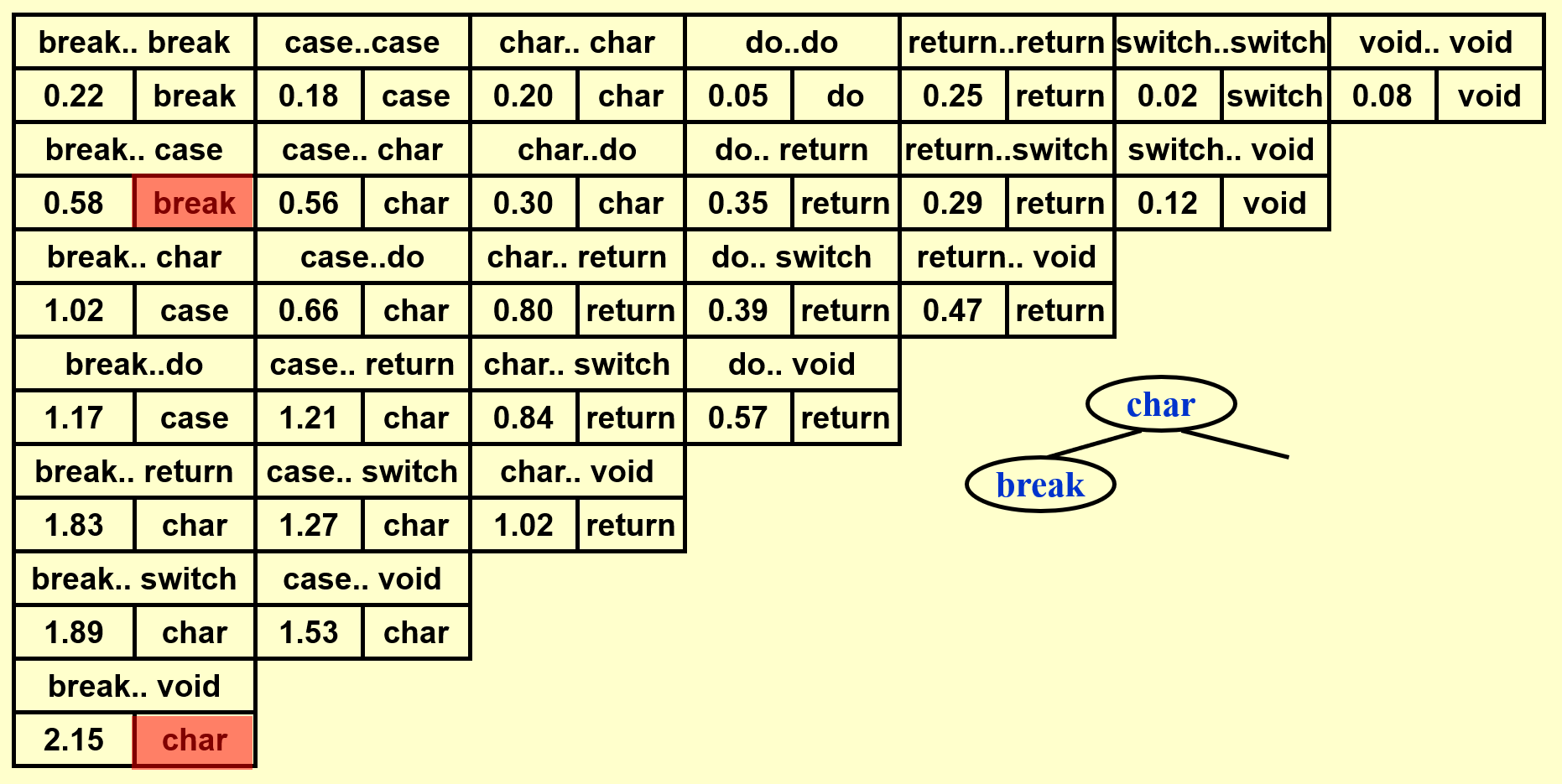
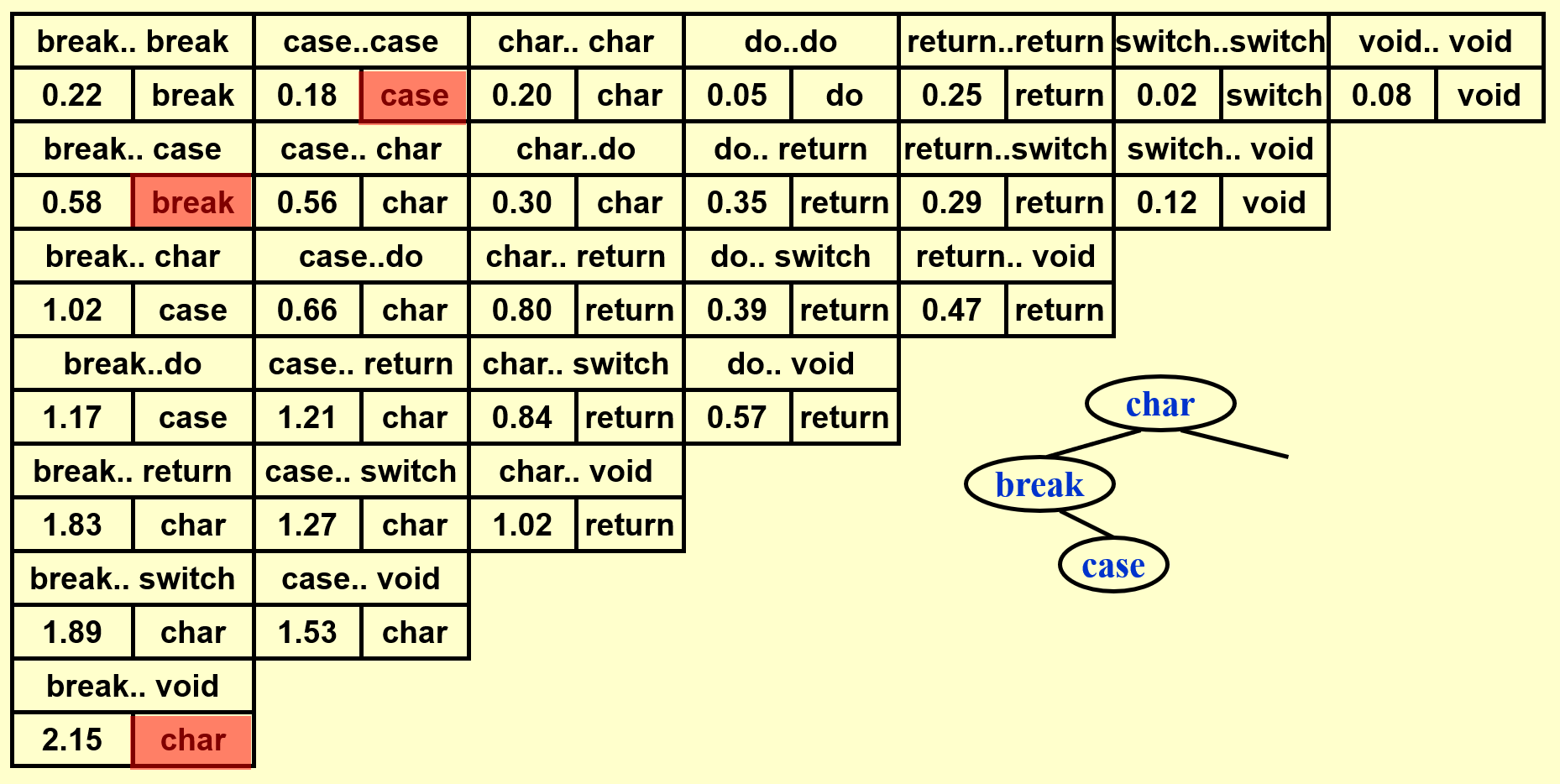
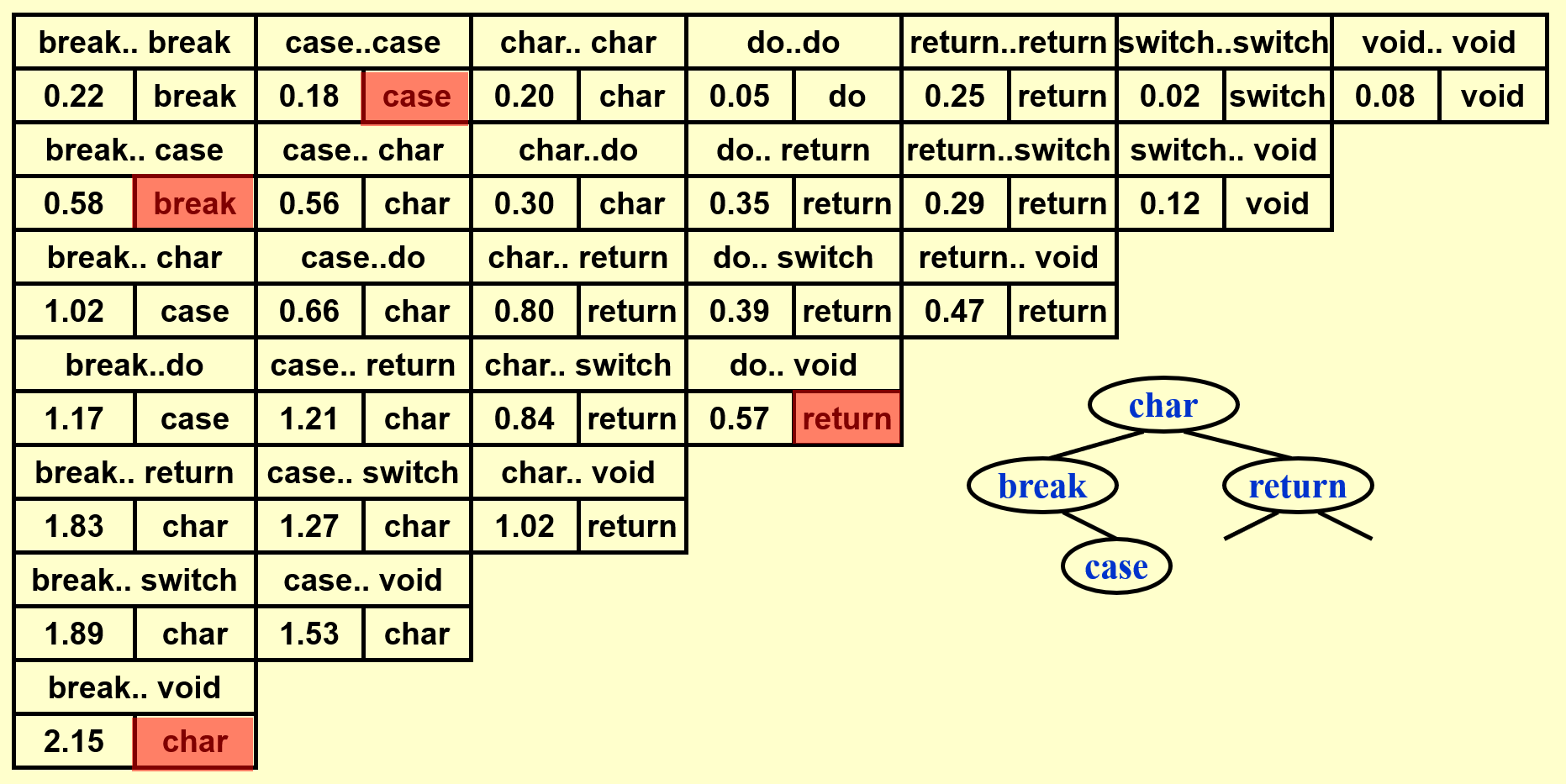
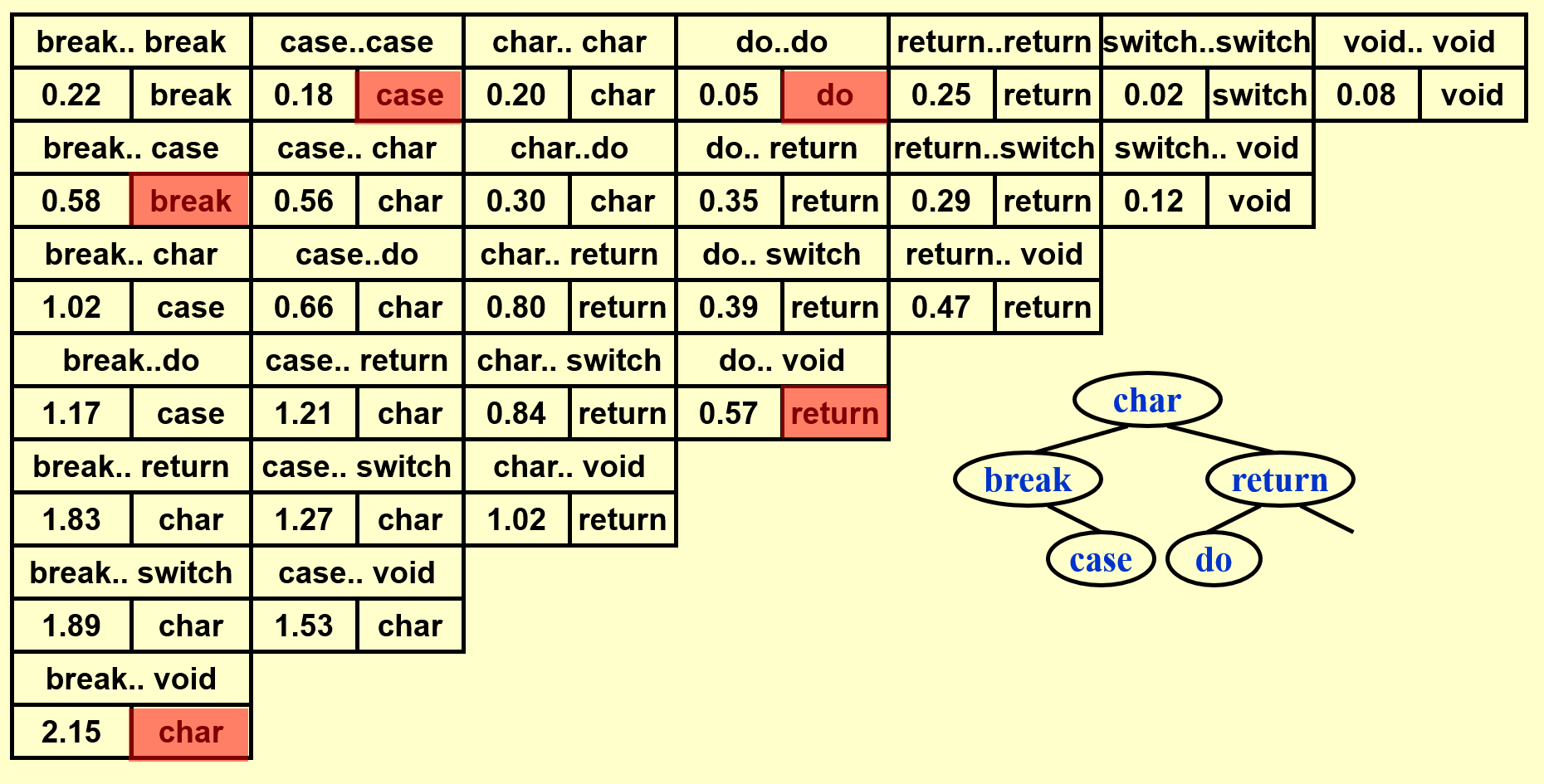
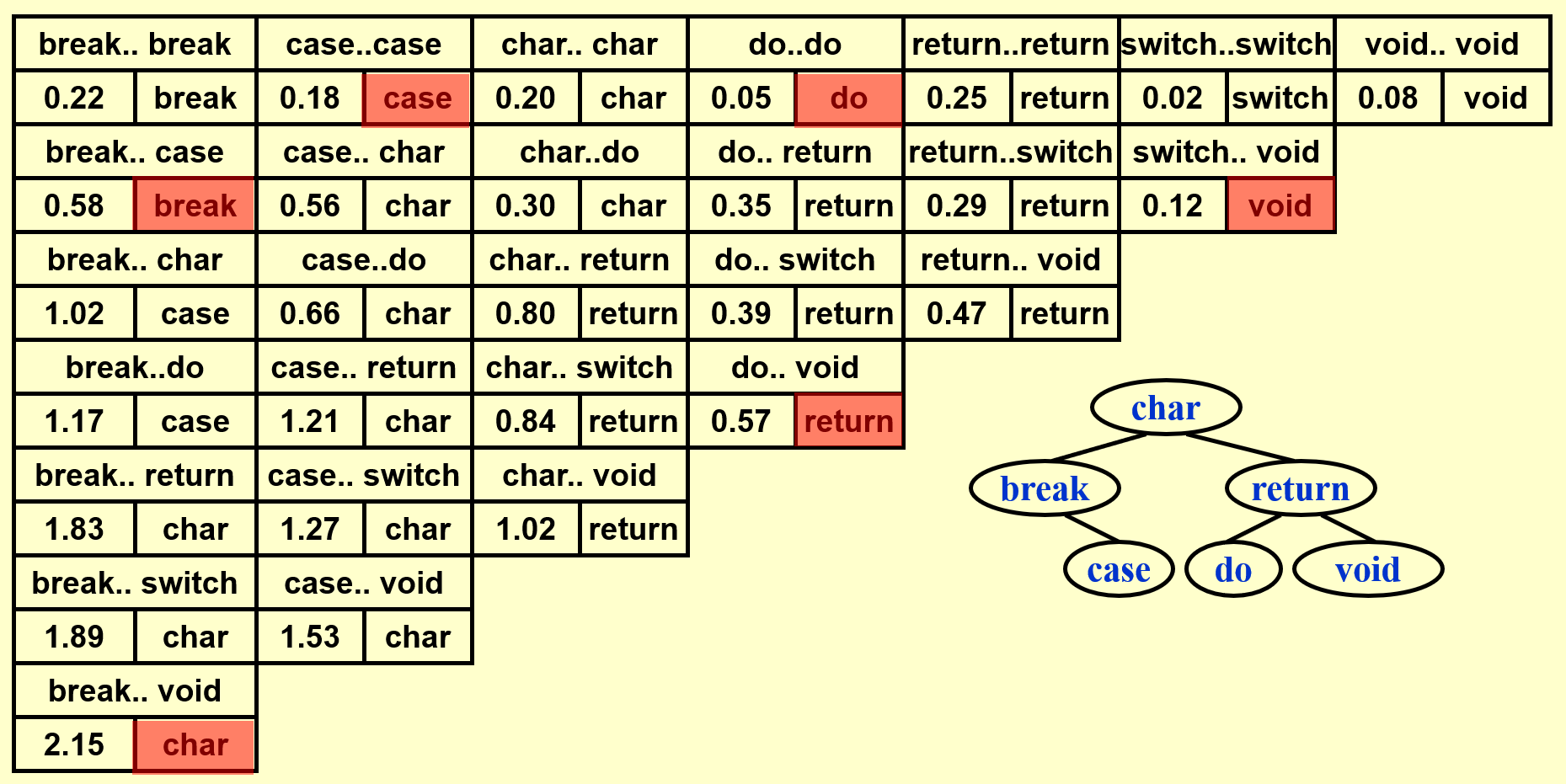
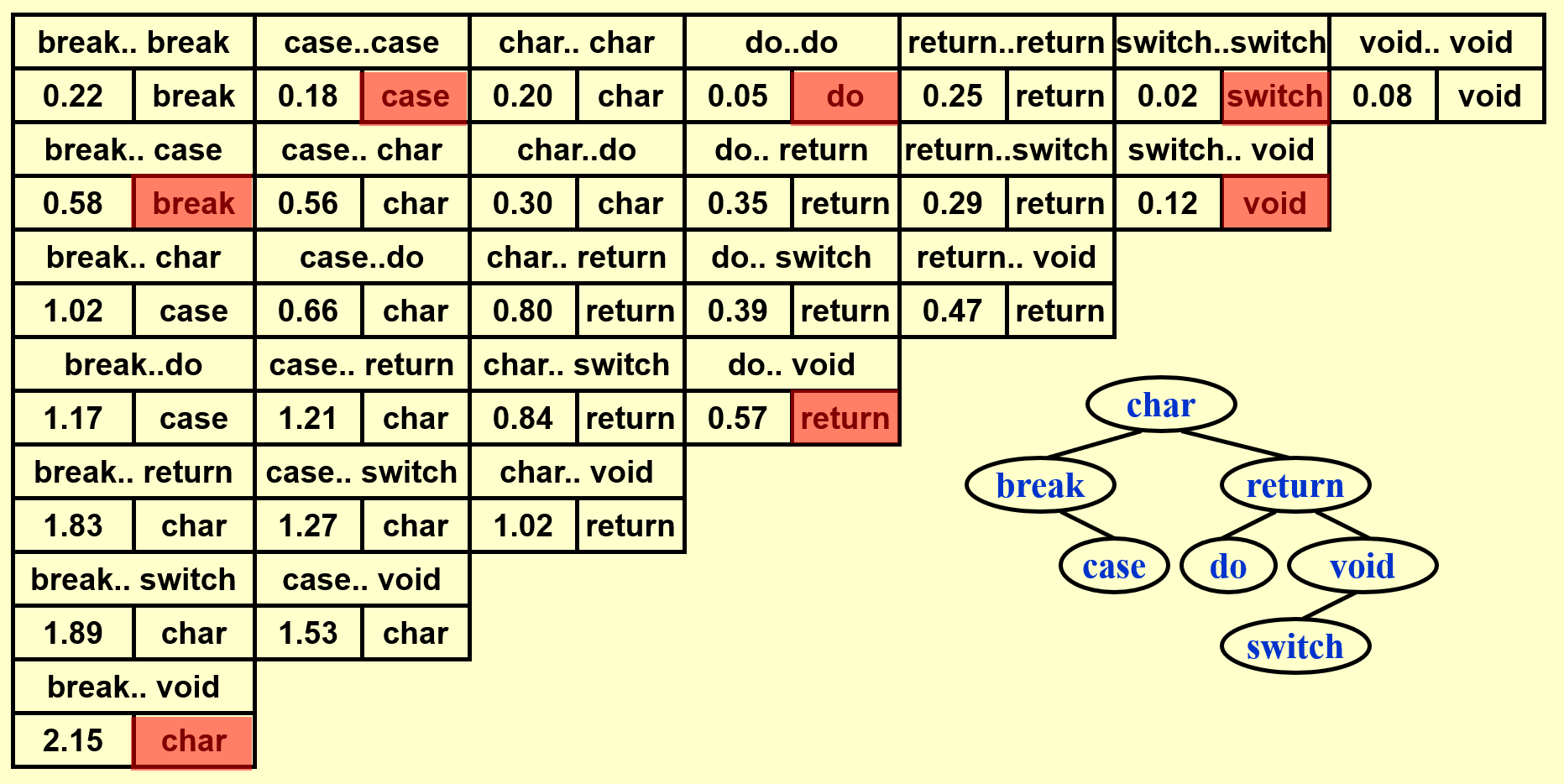
可以看到 OBST 可以确保词频较大的单词的深度尽可能小,从而有效降低了总的查找时间。
时间复杂度:\(T(N) = O(N^3)\)
注:教材Data Structures and Algorithm Analysis in C第十章课后习题还给出了一个 \(O(N^2)\) 的解法,感兴趣的同学可以自行研究一下。
Floyd Shortest Path Algorithm⚓︎
在 FDS 的课上,我们已经介绍过单源最短路算法——Dijkstra 算法,它的时间复杂度为 \(O(|V|^2)\)(\(|V|\) 为图的顶点数
先给出定义:
- \(D^k[i][j] = \min\{\text{length of path}\ i \rightarrow \{l \le k\} \rightarrow j\}\),其中 \(k\) 为当前判断的第 \(k\) 个节点(\(k \in [0, N - 1]\),共 \(N\) 个待判断的点)
- \(D^{-1}[i][j] = \text{Cost}[i][j]\)(\(k = -1\) 表示 \(i, j\) 之间没有任何节点,即初始状态)
则从顶点 \(i\) 到顶点 \(j\) 之间的最短路径长度为 \(D^{N-1}[i][j]\)。
Floyd 算法的大致思路:从 \(D^{-1}\) 开始,连续得到 \(D^0, D^1, \dots, D^{N-1}\)。如果已经解决了 \(D^{k-1}\),则此时有两种可能的情况:
- 第 \(k\) 个节点并不在最短路内,即 \(D^k = D^{k - 1}\)
- 第 \(k\) 个节点在最短路内,那么满足 \(D^k[i][j] = D^{k-1}[i][k] + D^{k-1}[k][j]\)
因此有递推关系:\(D^k[i][j] = \min\{D^{k-1}[i][j], D^{k-1}[i][k] + D^{k-1}[k][j]\}, k \ge 0\)
代码实现
// A[] contains the adjacency matric with A[i][i] = 0
// D[] contains the values of the shortest path
// N is the number of vertices
// A negative cycle exists iff D[i][i] < 0
void AllPairs(TwoDimArray A, TwoDimArray D, int N) {
int i, j, k;
for (i = 0; i < N; i++) // initialize D
for (j = 0; j < N; j++)
D[i][j] = A[i][j];
for (k = 0; k < N; k++) // add the kth vertex into the path
for (i = 0; i < N; i++)
for (j = 0; j < N; j++)
if (D[i][k] + D[k][j] < D[i][j]) // update shortest path
D[i][j] = D[i][k] + D[k][j];
}
- 该算法适用于负权边,但不适用于负权环
- 可以看到,上述函数仅计算了任意两点间的最短路径长度,并没有记住最短路径是什么样子的,读者可以尝试着添加这个功能。
记录路径的版本
// Compute All-Shortest Paths
// A[] contains the adjacency matrix
// with A[i][i] presumed to be zero
// D[] contains the values of shortest path
// |V| is the number of vertices
// A negative cycle exists iff
// d[i][j] is set to a negative value
// Actual Path can be computed via another procedure using path
// All arrays are indexed starting at 0
void all_pairs( two_d_array A, two_d_array D, two_d_array path ) {
int i, j, k;
for (i = 0; i < |V|; i++) // Initialize D and path
for (j = 0; j < |V|; j++) {
D[i][j] = A[i][j];
path[i][j] = NOT_A_VERTEX;
}
for (k = 0; k < |V|; k++)
// Consider each vertex as an intermediate
for (i = 0; i < |V|; i++)
for (j = 0; j < |V|; j++)
if (d[i][k] + d[k][j] < d[i][j]) { // update min
d[i][j] = d[i][k] + d[k][j];
path[i][j] = k;
}
}
时间复杂度:\(T(N) = O(N^3)\),但是在稠密图中表现较好。
思考题
k 的枚举顺序是否可以改变,比如倒序枚举、乱序枚举?
可以的,因为 Floyd 算法就是求任意两点间的最短路,而顶点的顺序也是我们人为定的。所以如果顶点的枚举顺序被打乱的话,那么可以将这个新的顺序作为“顺序”(即顶点顺序 \(0,1,2, \dots, n-1 \rightarrow t_0, t_1, \dots, t_{n-1}\)
能否改变 i, j, k 的循环顺序,比如按照 i, k, j 的顺序进行循环遍历,而非原来的 k, i, j?
不行,举个例子就很明白了:如果 i = 0,因为 d[i][j] = min(d[i][k] + d[k][j], d[i][j]),意味着需要计算 d[i][k] 和 d[k][j],但是此时 k 和 j 都比 i 大,所以 d[k][j] 还没有被算出来,因而不能正确更新 d[i][j] 的值。所以我们不能将 k 的循环放到中间。
注:离散数学提到过与 Floyd 算法等价的算法——Warshall 算法,用于计算传递闭包。
Product Assembly⚓︎
问题描述
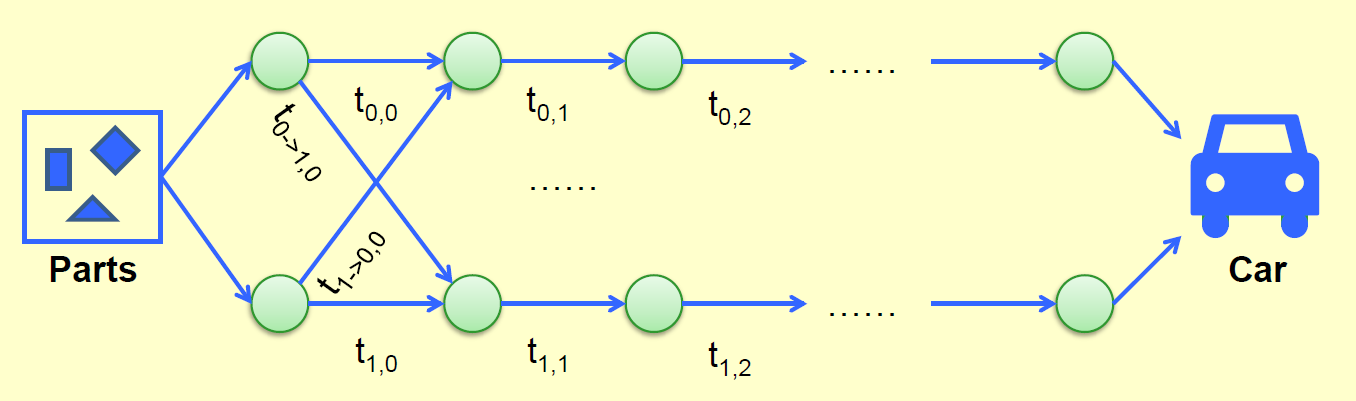
产品组装 (product assembly) 问题,有以下条件
- 一辆车的生产需要用到两条组装线
- 每个阶段会用到不同的工艺(时间,即不同的节点值)
- 在各阶段中,可以随时切换组装线
现在要求你求出最短的组装总时间。
穷举算法
把每个点当作一个二进制位,不同的二进制数对应不同的情况。
- 时间复杂度:\(O(2^N)\)(每个点都有选或不选这两种选择)
- 空间复杂度:\(O(N)\)
显然这种算法是不现实的。
下面我们严格按照 Background 提到的解题步骤来解决这一问题:
-
定义状态
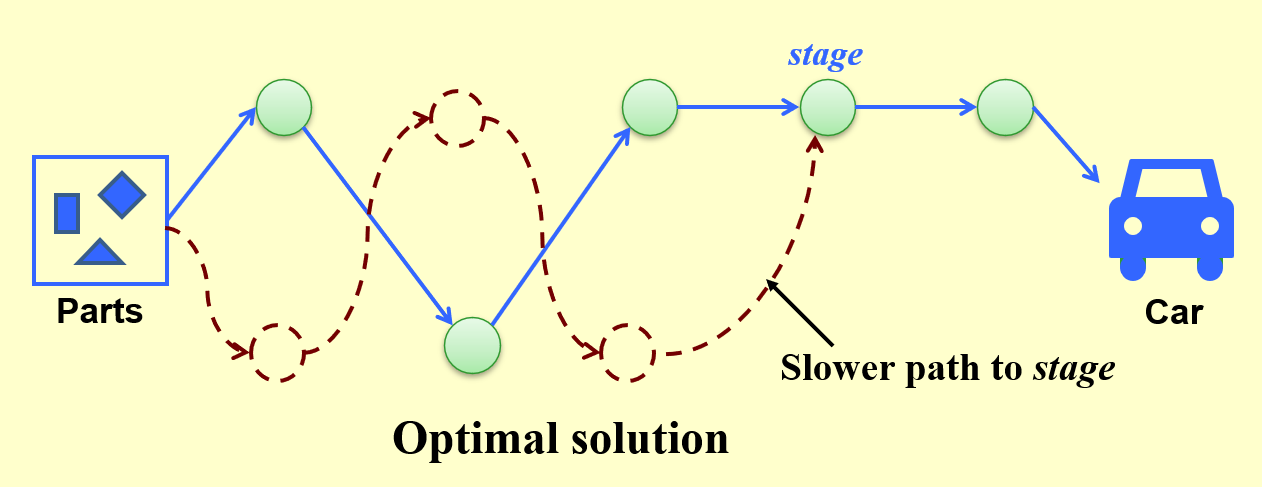
- 这张图给出了在stage阶段时的最优解(绿点 + 蓝线)
- 红色虚线表示虽然有一条同样能在stage阶段到达同一个点的路径,但这条路径所花的时间更长,因此被 pass 掉了
-
递归地定义最优解的值
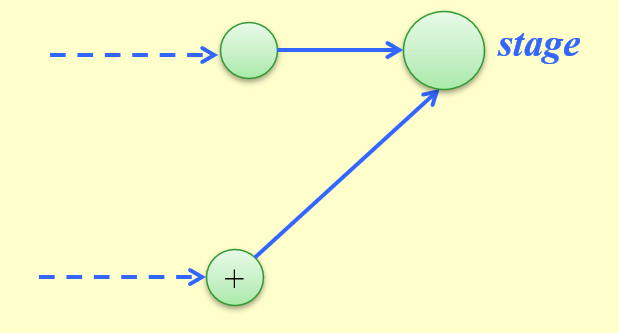
- 可以看到,在stage阶段时,我们有两种到达对应点的路径:要么来自第一条组装线,要么来自第二条组装线
- 因此,我们不难得出以下递推关系式:
\[ \begin{align} f[line][stage] & = \min\{f[line][stage - 1] + t_{process}[line][stage - 1] \notag \\ & , f[1 - line][stage - 1] + t_{transit}[1 - line][stage - 1]\} \notag \end{align} \]其中 \(f[line][stage]\) 表示在stage阶段时,在第line条组装线上的最优时间,\(t_{process}[line][stage]\) 表示在同一条组装线上进入stage阶段所需的时间,\(t_{transit}[line][stage]\) 表示从不同组装线上进入stage阶段所需的时间。
-
确定好计算的顺序。这里直接看代码:
代码实现
// Initialization f[0][0] = 0; f[1][0] = 0; // Outer loop: start from the first stage, end with the last stage for (stage = 1; stage <= n; stage++) { // Inner loop: test each line and find the minimum path for (line = 0; line <= 1; line++) { f[line][stage] = min(f[line][stage - 1] + t_process[line][stage - 1], f[1 - line][stage - 1] + t_transit[1 - line][stage - 1]); } } // The solution comes from the last stage of two lines Solution = min(f[0][n], f[1][n]); -
重构解决问题的策略。这里要求输出最短时间的组装顺序,代码如下所示:
代码实现
f[0][0] = 0; f[1][0] = 0; // L[line][stage]: record the source of the stage, either 0 or 1(the number of assembly lines) L[0][0] = 0; L[1][0] = 0; for (stage = 1; stage <= n; stage++) { for (line = 0; line <= 1; line++) { f_stay = f[line][stage - 1] + t_process[line][stage - 1]; f_move = f[1 - line][stage - 1] + t_transit[1 - line][stage - 1]; if (f_stay < f_move) { f[line][stage] = f_stay; L[line][stage] = line; } else { f[line][stage] = f_move; L[line][stage] = 1 - line; } } } // save the optimal path in plan[] line = f[0][n] < f[1][n] ? 0 : 1; for (stage = n; stage > 0; stage--) { plan[stage] = line; line = L[line][stage]; }
时间复杂度:\(T = O(N)\)
一道很像这道题的动态规划题目(历年卷编程题)
Knapsack Problem⚓︎
背包问题这块内容主要参照 Hello 算法和 OI Wiki 来写的,ADS 课程将其放在“近似算法”一讲中介绍,但介绍的不多。
背包问题(knapsack problem) 可能是最常见的动态规划入门题,大致的问题描述为:
问题描述
有 \(n\) 个物品和一个容量为 \(W\) 的背包,每个物品有重量 \(w_{i}\) 和价值 \(v_{i}\) 两种属性(\(1 \le i \le n\)
背包问题的有多种类型,包括:
- 0-1 背包问题(0-1 knapsack problem)
- 完全背包问题(unbounded knapsack problem)
- 多重背包问题(bounded knapsack problem)
0-1 Knapsack Problem⚓︎
0-1 背包问题在原问题上多了一个限制:每个物品只能选一次。
解题步骤:
-
定义状态
- 观察发现,放入物品会改变背包内物品的总价值和背包容量,因此需要记录的量为前 \(i\) 个物品在容量为 \(c\) 的背包中的最大价值,用符号化的语言表示为 \(dp[i, c]\),那么要求的就是 \(dp[n, cap]\)
- 用一张 \((n + 1) \times (cap + 1)\) 的表来记录状态
-
推导状态转移方程
- 当我们对物品 \(i\) 做出决策时,需要考虑两种情况
- 不放入物品:\(dp[i, c] = dp[i - 1, c]\),背包容量和价值均不变
- 放入物品:\(dp[i, c] = dp[i - 1, c - w_{i - 1}] + v_{i - 1}\),背包容量减少,价值增加
- 注意:我们规定,
dp[]数组是从 1 开始标号的(而 0 用于表示没有放入物品的情况) ,而w[]和v[]是从 0 开始标号的,因此第i个物品的权重和价值分别是w[i - 1]和v[i - 1],不要搞错了 ~
- 注意:我们规定,
-
因此完整的状态转移方程为:
\[ dp[i, c] = \max\{dp[i - 1, c], dp[i - 1, c - w_{i - 1}] + v_{i - 1}\} \]
- 当我们对物品 \(i\) 做出决策时,需要考虑两种情况
-
确定计算顺序
- 首先确定一下边界条件:当无物品或背包容量为 0 时最大价值为 0,即状态表首列 \(dp[i, 0]\) 和首行 \(dp[0, c]\) 均等于 0
- 根据状态方程知,当前状态是根据它上方和左上方的状态推出来的,因此只需正向循环遍历这张状态表即可
下面展示对应的代码实现:
代码实现
int knapsack_01(int weight[], int val[], int n, int cap) {
int i, j;
int dp[MAXN][MAXCAP];
for (i = 0; i <= n; i++)
for (j = 0; j <= cap; j++)
dp[i][j] = 0;
for (i = 1; i <= n; i++) {
for (j = 1; j <= cap; j++) {
if (weight[i - 1] > c) {
dp[i][j] = dp[i - 1][j];
} else {
dp[i][j] = max(dp[i - 1][j], dp[i - 1][j - weight[i - 1]] + val[i - 1]);
}
}
}
return dp[n][cap];
}
- 时间复杂度:\(O(n \cdot cap)\)
- 空间复杂度:\(O(n \cdot cap)\)
事实上,这种算法在空间上还可以再优化(\(O(n \cdot cap) \rightarrow O(n)\)
- 观察发现,第 i 行状态表的状态来自于第 i-1 行状态表的状态;且遍历第 i 行时第 i-1 行的状态已经算好了,因此我们尝试将状态表从二维降到一维
- 这时就不能正向遍历了,因为在原来的状态表中,当前状态依赖于它上面的和左上角的状态;如果压缩成一维,左上角的状态就被压到了左边,而左边的状态即上一个状态已经更新过了,所以正向遍历就失效了,因此采取倒序遍历的策略
代码实现
“近似算法”一讲还会继续深入介绍 0-1 背包问题。
Unbounded Knapsack Problem⚓︎
完全背包问题则解放了 0-1 背包的限制:每个物品可以重复选取(无数次)。
- 解题思路与 0-1 背包问题类似,唯一的区别在于状态转移方程中,选取物品的时候不需要改变 i 值,因为物体可以重复选取
- 对于空间压缩,由于当前状态依赖于上面和左边的状态,因此将数组压缩成一维后,正向遍历就能正确解决问题
代码实现
// 与上面代码的唯一区别在于内部循环的遍历顺序发生改变
int knapsack_ub(int weight[], int val[], int n, int cap) {
int j;
int dp[MAXN][MAXCAP];
for (j = 0; j <= cap; j++)
dp[j] = 0;
for (i = 1; i <= n; i++) {
for (j = 1; j <= cap; j++) {
if (weight[i - 1] <= j) {
dp[j] = max(dp[j], dp[j - weight[i - 1]] + val[i - 1]);
}
}
}
return dp[cap];
}
Bounded Knapsack Problem⚓︎
多重背包问题有了更复杂的限制:物品 \(i\) 最多只能选取 \(k_i\) 次。
-
此时状态转移方程为:
\[ dp[i, c] = \max\limits_{0 \le k \le k_i}\{dp[i - 1, c], dp[i - 1, c - w_{i - 1} \cdot k] + v_{i - 1} \cdot k\} \]也就是说,对于每种物品,我们需要加一层遍历来决定选取多少的这一类的物品,因此时间复杂度就提升至 \(O(n \cdot cap \cdot \max\{k_i\})\),但空间复杂度没有改变
-
事实上该算法还可以进一步优化,甚至可以将时间复杂度降到线性
这里就不列出相应的代码了(笔者偷懒了,逃 x)
推荐阅读
更多的背包问题推荐阅读《背包问题九讲
Other Examples⚓︎
动态规划的题目数不胜数,还有很多经典的例题没来得及讲解,对 dp 感兴趣的同学可以在网上搜索相应资料:
- 最长公共子序列问题
- 木棍切割问题
评论区