Chap 5: Initial-Value Problems for Ordinary Differential Equations⚓︎
约 6030 个字 预计阅读时间 30 分钟
核心知识
- 与 1 阶常微分方程的初值问题相关的基本知识
- 欧拉法
- 高阶泰勒法
- 欧拉法的变体:隐式欧拉法、梯形法、两步法
- Runge-Kutta 法
- 多步法
- Adams-Bashforth 显式法
- Adams-Moulton 隐式法
- Adams 预测器 - 纠正器系统
- 结合泰勒展开式
- 考虑高阶常微分方程
- 稳定性分析
注
本章的数学基础为常微分方程,但是在 CS 培养方案中并没有“常微分方程”相关的课程。但从个人学习体验来看,零基础应该没什么问题,所以不必特意找资料先学常微分方程(再说,实在无法理解的话可以先问 AI
The Elementary Theory of Initial-Value Problems⚓︎
1 阶常微分方程(ordinary differential equations, ODE) 的初值问题(initial-value problems, IVP):
第一个方程表达的意思的是(未知)函数 \(y\) 随自变量 \(t\)(往往是时间)的变化率是一个关于 \(t, y\) 的(已知)函数;第二个方程就是初始条件。
目标:在一组网格点 (mesh points) \(a = t_0 < t_1 < \dots < t_n = b\) 上(通常是等间距的)计算 \(y(t)\) 的近似值。也就是说,计算 \(w_i \approx y(t_i) = y_i\ (i = 1, \dots, n)\)。
定义
对于函数 \(f(t, y)\),若存在常数 \(L > 0\),满足:
我们称该函数满足在变量 \(y \in D \subset R^2\) 上的 Lipschitz 条件。
定理
假设 \(D = \{(t, y)\ |\ a \le t \le b, -\infty < y < \infty\}\),且 \(f(t, y)\) 在 \(D\) 上连续。若 \(f\) 满足在变量 \(y \in D\) 上的 Lipschitz 条件,那么初值问题
有唯一解 \(y(t)\)(\(a \le t \le b\)
定义
若初值问题
满足以下条件,我们称之为适定性问题(well-posed problem):
- 问题存在唯一解 \(y(t)\)
-
\(\forall \varepsilon > 0\),存在正常数 \(k(\varepsilon)\),使得当 \(|\varepsilon_0| < \varepsilon\),并且 \(\delta(t)\) 在 \([a, b]\) 上连续且 \(|\delta(t)| < \varepsilon\) 时,对于
\[ z'(t) = f(t, z) + \delta(t), a \le t \le b, z(a) = \alpha + \varepsilon_0 \](上述式子称为扰动问题(perturbed problem)
) ,存在唯一解 \(z(t)\),满足 \(|z(t) - y(t)| < k(\varepsilon) \cdot \varepsilon\ (a \le t \le b)\)
定理
假设 \(D = \{(t, y)\ |\ a \le t \le b, -\infty < y < \infty\}\),且 \(f(t, y)\) 在 \(D\) 上连续。若 \(f\) 满足在变量 \(y \in D\) 上的 Lipschitz 条件,那么初值问题
具有适定性(well-posed)。
Euler's Method⚓︎
继续往下阅读前,不妨回顾一下前面提出的目标。
\(y'(t_0) \approx \dfrac{y(t_0 + h) - y(t_0)}{h}\ \Rightarrow\ y(t_1) \approx y(t_0) + hy'(t_0) = \alpha + hf(t_0, \alpha)\)
其中 \(h\) 为步长。
欧拉法(Euler's method) 的核心是用切线近似曲线,它通过差分方程(difference equations) 来计算近似值:\(\begin{cases}w_0 = \alpha \\ w_{i+1} = w_i + hf(t_i, w_i)\end{cases}\ (i = 0, \dots, n - 1)\)
定理
假设 \(f\) 在 \(D = \{(t, y)\ |\ a \le t \le b, -\infty < y < \infty \}\) 上是连续的,且满足 Lipschitz 条件(对应常数 \(L\)
令 \(y(t)\) 为初值问题 \(y'(t) = f(t, y), a \le t \le b, y(a) = \alpha\) 的唯一解,且 \(w_0, w_1, \dots, w_n\) 为通过欧拉法(对于某些正整数 \(n\))得到的近似值,那么:
注
\(y''(t)\) 可在不知道 \(y(t)\) 的情况下被计算出来:
代入舍入误差后,差分方程为:\(\begin{cases}w_0 = \alpha \textcolor{red}{+ \delta_0} \\ w_{i+1} = w_i + hf(t_i, w_i) \textcolor{red}{+ \delta_{i+1}}\end{cases}(i = 0, \dots, n - 1)\)
定理
令 \(y(t)\) 为初值问题 \(y'(t) = f(t, y), a \le t \le b, y(a) = \alpha\) 的唯一解,且 \(w_0, w_1, \dots, w_n\) 为使用上述差分方程得到的近似值。若 \(|\delta_i| < \delta\ (i = 0, \dots, n)\),那么 \(\forall\ i\)
其中 \(h \ge \sqrt{2 \delta / M}\)
High Order Taylor Methods⚓︎
定义
差分法 \(\begin{cases}w_0 = \alpha \\ w_{i+1} = w_i + h\varphi(t_i, w_i)\end{cases} (i = 0, \dots, n - 1)\) 的局部截断误差(local truncation error) 为:
注
局部截断误差就是 \(\dfrac{y_{i+1} - w_{i+1}}{h}\)(基于假设 \(w_i = y_i\)
欧拉法的局部截断误差:
注
我一开始没看出这一点(
还是太菜了)
所以欧拉法本质上是泰勒展开式的 1 阶形式,换句话说我们可通过 \(n = 1\) 时泰勒展开式得到的欧拉法近似表示 \(y(t)\)。
高阶泰勒法公式为:
对于阶数为 \(n\) 的泰勒法,其对应的差分方程为:
其中 \(T^{(n)}(t_i, w_i) = f(t_i, w_i) + \dfrac{h}{2}f'(t_i, w_i) + \dots + \dfrac{h^{n-1}}{n!} f^{(n-1)}(t_i, w_i)\)
若 \(y \in C^{n+1}[a, b]\),那么局部截断误差是 \(O(h^n)\)。
讨论
应用 \(n = 10\) 的 3 阶泰勒法,解决初值问题 \(y' = y - t^2 + 1, 0 \le t \le 2, y(0) = 0.5\)。
这里的 \(n\) 是区间分段数,不是题目前面讲的阶数。
找到 \(f\) 的前两个导数:
- \(f(t, y(t)) = y(t) - t^2 + 1\)
- \(f'(t, y(t)) = y'(t) - 2t = y(t) - t^2 + 1 - 2t\)
- \(f''(t, y(t)) = y'(t) - 2t - 2 = y(t) - t^2 - 2t - 1\)
得到:
通过 3 阶泰勒法,得到差分方程:\(\begin{cases}w_0 = 0.5 \\ w_{i+1} = w_i + h\Big[\Big(1 + \dfrac{h}{2} + \dfrac{h^2}{6}\Big)(w_i - t_i^2 + 1) - \Big(1 + \dfrac{h}{3}ht_i - \dfrac{h^2}{3}\Big)\Big]\end{cases}\)
因为 \(n = 10\),那么 \(h = 0.2, t_i = 0.2i, w_{i+1} = 1.22133w_i - 0.00855i^2 - 0.00853i + 0.21867\)。
Other Euler's Methods⚓︎
-
隐式欧拉法(implicit Euler's method)
-
\(y'(t_0) \approx \dfrac{y(t_0) - y(t_0 - h)}{h}\ \Rightarrow\ \textcolor{red}{y(t_1)} \approx y(t_0) + hy'(t_1) =\alpha + hf(t_1, \textcolor{red}{y(t_1)})\)
-
差分方程为 \(\begin{cases}w_0 = \alpha \\ \textcolor{red}{w_{i+1}} = w_i + hf(t_{i+1}, \textcolor{red}{w_{i+1}})\end{cases} (i = 0, \dots, n - 1)\)
- 之所以称为“隐式”,是因为差分方程左右两边都有 \(w_{i+1}\),这意味着我们需要通过解方程得到 \(w_{i+1}\),而无法像一般的欧拉法(相对地,我们将其称为显式欧拉法)那样直接计算得到 \(w_{i+1}\)
- 通常以迭代形式求解 \(w_{i+1}\),其初始值通过显式法给出
- 隐式欧拉法的局部截断误差为 \(\tau_{i+1} = \dfrac{y_{i+1} - w_{i+1}}{h} = -\dfrac{h}{2}y''(\xi_i) = O(h)\)
- 相比显式法,该方法更为稳定,因为计算 \(w_{i+1}\) 时用到了未来的信息 \(t_{i+1}, w_{i+1}\),从而能更准确地预测未来趋势,对解的约束也就越强;而显式法只用了当前的信息 \(t_{i}, w_{i}\),其预测结果自然会有更大的偏差
-
-
梯形法(trapezoidal method)
- 差分方程为 \(\begin{cases}w_0 = \alpha \\ \textcolor{red}{w_{i+1}} = w_i + \dfrac{h}{2}[f(t_i, w_i) + f(t_{i+1}, \textcolor{red}{w_{i+1}})]\end{cases} (i = 0, \dots, n - 1)\)
- 注:局部截断误差为 \(O(h^2)\);但必须以迭代方式求解隐式方程
-
两步法(double-step method)
- \(y'(t_0) = \dfrac{1}{2h}[y(t_0 + h) - y(t_0 - h)] - \dfrac{h^2}{6}y^{(3)}(\xi_1)\ \Rightarrow\ y(t_2) \approx y(t_0) + 2hf(t_1, y(t_1))\)
- 差分方程为 \(\begin{cases}w_0 = \alpha \\ w_{i+1} = w_{i-1} + 2hf(t_i, w_i)\end{cases} (i = 1, \dots, n - 1)\)
- 该方法要求知道两个初始点,故得其名;而先前讨论的方法都是单步法(single-step methods)
- 也就是说,两步法除了要知道 \(w_0\)(即原来的初值)外,还要知道 \(w_1\) 的值,因此需要先用单步法得到 \(w_1\) 后再用多步法
- 若假设 \(w_{i-1} = y_{i-1}, w_i = y_i\),那么局部截断误差为 \(O(h^2)\)
- 由于两步法用到了更多点的信息,因此能得到更精确的近似结果
比较上述各法的优劣
| 方法 | 👍 | 👎 |
|---|---|---|
| 显式欧拉法 | 简单 | 低阶精度 |
| 隐式欧拉法 | 稳定 | 低阶精度、耗时(计算量大) |
| 梯形法 | 更精确 | 耗时 |
| 两步法 | 更精确、显式 | 要求一个额外的初始点 |
Runge-Kutta Methods⚓︎
Runge-Kutta 法是一种具有高阶局部截断误差的单步方法,无需计算 \(f\) 的导数。
思路:在单步法中,某个线段从 \((t_i, w_i)\) 出发,以某个斜率延伸至下一个点 \((t_{i+1}, w_{i+1})\)。我们可以通过找到更好的斜率来改善结果。
观察以下修改过的欧拉法(即改进欧拉法,下面会介绍的
- 斜率是否必须是 \(K_1, K_2\) 的平均值?
- 步幅是否必须为 \(h\)?
我们将其进一步泛化(从一般的平均值 -> 加权平均值
我们要找到 \(\lambda_1, \lambda_2, p\),使得该方法的局部阶段误差的阶数为 2。
-
写出 \(K_2\) 在 \((t_i, y_i)\) 上的泰勒展开式:
\[ \begin{align} K_2 & = f(t_1 + ph, y_i + phK_1) \notag \\ & = f(t_i, y_i) + phf_t(t_i, y_i) + phK_1f_y(t_i, y_i) + O(h^2) \notag \\ & = y'(t_i) + phy''(t_i) + O(h^2) \notag \end{align} \]注
\[ \begin{align} y''(t) & = \dfrac{d}{dt}f(t, y) \notag \\ & = f_t(t, y) + f_y(t, y) \dfrac{dy}{dt} \notag \\ & = f_t(t, y) + f_y(t, y)f(t, y) \notag \end{align} \] -
将 \(K_2\) 代入到第一个式子中:
\[ \begin{align} w_{i+1} & = y_i + h\{\lambda_1 y'(t_i) + \lambda_2[y'(t_i) + phy''(t_i) + O(h^2)]\} \notag \\ & = y_i + (\lambda_1 + \lambda_2) hy'(t_i) + \lambda_2 ph^2 y''(t_i) + O(h^3) \notag \end{align} \] -
找到 \(\lambda_1, \lambda_2, p\),使得 \(\tau_{i+1} = (y_{i+1} - w_{i+1}) / h = O(h^2)\)
比对上面两个方程,可以得到:\(\lambda_1 + \lambda_2 = 1, \lambda_2 p = \dfrac{1}{2}\)(3 个未知数,2 个方程)
所以有无穷多个解。而由这两个方程得到的一系列方法被称为 2 阶龙格 - 库塔法(Runge-Kutta method of order 2)。
注
本节开始提到的改进欧拉法就是龙格 - 库塔法的一种特殊情况(\(p = 1, \lambda_1 = \lambda_2 = \dfrac{1}{2}\))
2 阶龙格 - 库塔法的多种形式
-
中点法(midpoint method):将从二阶泰勒法中的 \(T^{(2)}(t, y)\) 用 \(f(t + h / 2, y + (h / 2)f(t, y))\) 替换得到的差分方程法。
\[ \begin{cases} w_0 = \alpha \\ w_{i+1} = w_i + hf(t_i + \dfrac{h}{2}, w_i + \dfrac{h}{2}f(t_i, w_i)) \end{cases} \quad (i = 0, \dots, N - 1) \] -
改进欧拉法(modified Euler method):
\[ \begin{cases} w_0 = \alpha \\ w_{i+1} = w_i + \dfrac{h}{2}[f(t_i, w_i) + f(t_{i+1}, w_i + hf(t_i, w_i))] \end{cases} \quad (i = 0, \dots, N - 1) \] -
Heun 法:
\[ \begin{cases} w_0 = \alpha \\ w_{i+1} = w_i + \dfrac{h}{4}[f(t_i, w_i) + 3f(t_i + \dfrac{2}{3}h, w_i + \dfrac{2}{3}hf(t_i, w_i))] \end{cases} \quad (i = 0, \dots, N - 1) \]
计算更高精度:
最流行的是经典 4 阶龙格 - 库塔法:
注
-
在使用龙格 - 库塔法时,主要的计算量在于求解 \(f\)。Butcher 已经帮我们建立好了每步求值次数与局部截断误差阶数之间的关系:

-
因为龙格 - 库塔法是基于泰勒展开式的,所以 \(y\) 不得不足够平滑,以获取在高阶方法下的更高的精度。通常低阶方法相比高阶方法会采用更小的步幅。
Multistep Methods⚓︎
思路:使用 \(y, y'\) 在多个网格点 (mesh points) 上的线性组合,以得到更好的近似值 \(y(t_{i+1})\)。
多步法(multistep method) 的一般形式如下:
- 在隐式法中,\(b_m \ne 0\)
- 在显式法中,\(b_m = 0\)
具体方法:从积分中获取。在 \([t_i, t_{i+1}]\) 上对 \(y'(t) = f(t, y)\) 进行积分,得到:
关键是近似计算积分。不同的近似方法会得到不同的差分方程。
Adams-Bashforth Explicit \(m\)-step Technique⚓︎
使用牛顿后向差分公式,在 \((t_i, f_i), (t_{i-1}, f_{i-1}), \dots, (t_{i+1-m}, f_{i+1-m})\) 上对 \(f\) 进行插值,并得到 \(P_{m-1}(t)\)。或者令 \(t = t_i + sh, s \in [0, 1]\),我们有:
最后得到显式公式:\(w_{i+1} = w_i + h\int_0^1 P_{m-1}(t_i + sh)ds\)
定义
多步法的局部截断误差为:
其中 \(i = m-1, m, \dots, n - 1\)
例子
请求出 Adams-Bashforth 2 步显式法。
使用牛顿后向差分公式,在 \((t_i, f_i), (t_{i-1}, f_{i-1})\) 上对 \(f\) 插值:
得到 \(w_{i+1} = w_i + h \int_0^1 [f_i + s(f_i - f_{i-1})] ds = w_i + \dfrac{h}{2} (3f_i - f_{i-1})\)
局部截断误差为:
注
一般来说,对于 \(\tau = A_mh^my^{(m+1)}(\xi_i)\),\(A_m\) 和系数 \(f_i, f_{i-1}, f_{i+1-m}\) 能从表格中找到。
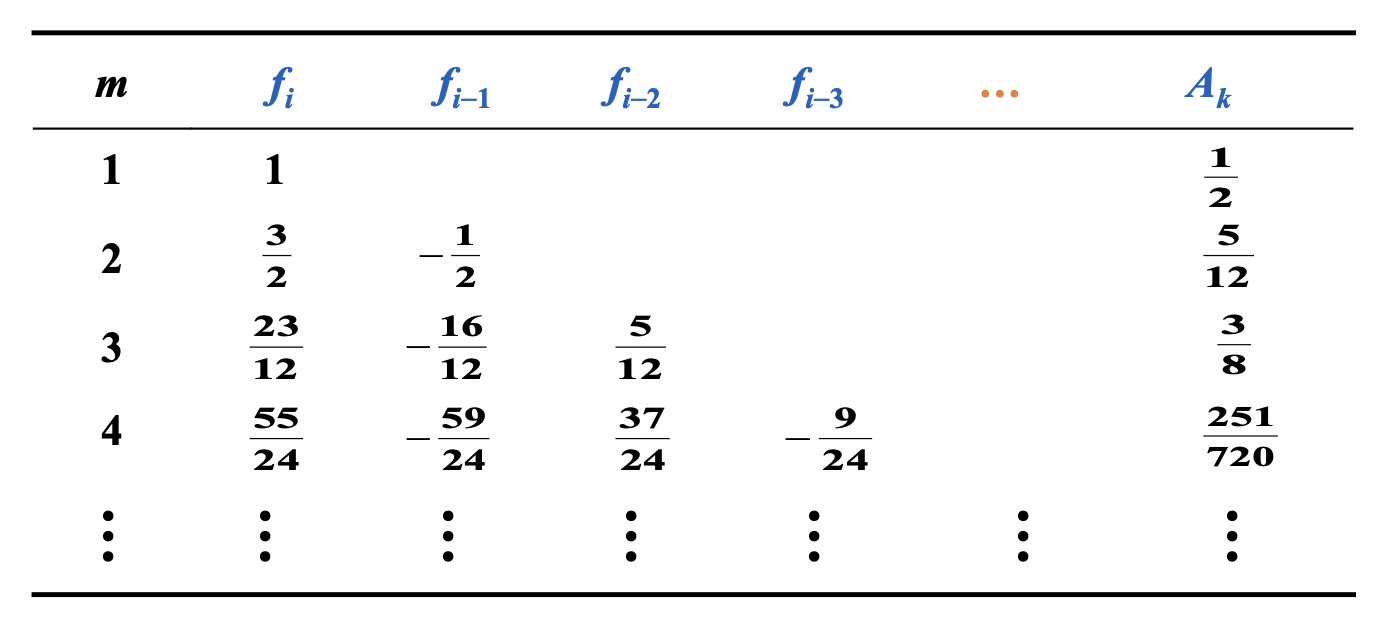
Adams-Bashforth 4 步显式法:\(w_{i+1} = w_i + \dfrac{1}{24} (55f_i - 59 f_{i-1} + 37 f_{i-2} - 9f_{i-3})\)
Adams-Moulton Implicit \(m\)-step Technique⚓︎
使用牛顿前向差分公式,在 \((t_{i+1}, \textcolor{red}{f_{i+1}}), (t_i, f_i), \dots, (t_{i+1-m}, f_{i+1-m})\) 上对 \(f\) 进行插值,并得到 \(P_m(t)\)。类似的,我们可以得到一组 \(\tau_{i+1} = B_m h^{m+1} y^{(m+2)} (\xi_i)\) 的隐式公式。
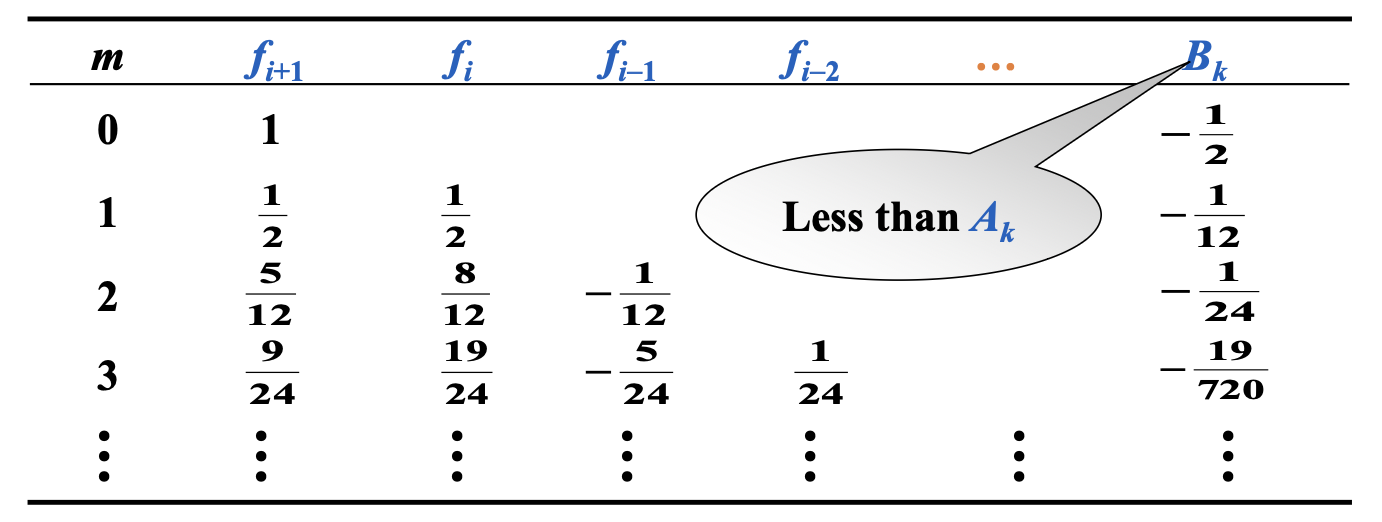
Adams-Moulton 3 步隐式法:\(w_{i+1} = w_i + \dfrac{h}{24} (9 f_{i+1} + 19 f_i - 5 f_{i-1} + f_{i-2})\)
Adams Predictor-Corrector System⚓︎
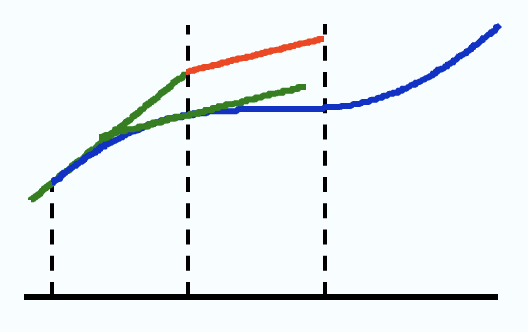
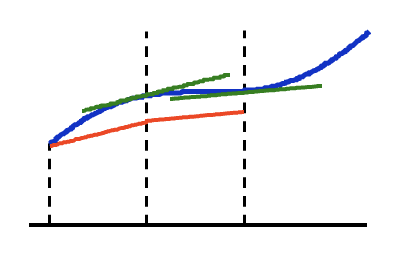
- 用 Runge-Kutta 法计算前 \(m\) 个初始值(为多步法(\(m\) 步)的启动做准备)
- 用 Adams-Bashforth 显式法进行预测(效率高)
- 用 Adams-Moulton 隐式法进行校正(提高精度,更稳定)
注
- 对于上述步骤用到的三个公式,它们的局部截断误差必须有相同的阶数。
- 最受欢迎的系统是将 4 阶 Adams-Bashforth 法作为预测器,将 1 次迭代下的 Adams-Moulton 法作为校正器,而起始值通过 4 阶 Runge-Kutta 法获得。
Derive from Taylor Expansion⚓︎
回顾多步法的一般形式。
思路:扩展在关于 \(t_i\) 的泰勒级数里的 \(y_{i-1}, \dots, y_{i+1-m}\) 和 \(f_{i+1}, f_{i-1}, \dots, f_{i+1-m}\),并让 \(h^k\) 的系数相等,以获得 \(a_0, \dots, a_{m-1}\) 和 \(b_0, \dots, b_m\)。
例子
请求出形如以下形式的 4 阶公式:
在 \(t_i\) 处扩展 \(y_{i-1}, y_{i-2}, f_{i-1}, f_{i-2}, f_{i-3}\) 和 \(y(t_{i+1})\)
假设 \(w_i = y_i\) 的情况下,\(\tau_{i+1} = \dfrac{y_{i+1} - w_{i+1}}{h} = O(h^4)\)
有 5 个方程,7 个未知量。
- 令 \(a_0 = a_1 = 0\) -> Adams-Bashforth 显式法
- 用 \(f_{i+1}\) 替换 \(f_{i-1}\),并令 \(a_0 = a_1 = 0\) -> Adams-Moulton 隐式法
-
用 \(w_{i-3}\) 替换 \(f_{i-3}\),我们能得到另一组阶数为 4 的方法,包括了显式 Milne 法:
\[ w_{i+1} = w_{i-3} + \dfrac{4h}{3}(2f_i - f_{i-1} + 2f_{i-2}) \]其截断误差为 \(\dfrac{14}{45}h^4y^{(5)}(\xi_i), \xi_i \in (t_{i-3}, t_{i+1})\)
-
令 \(a_0 = 0, a_1 = 1\) -> Simpson 隐式法
\[ w_{i+1} = w_{i-1} + \dfrac{h}{3}(f_{i+1} + 4f_i + f_{i-1}) \]其截断误差为 \(-\dfrac{h^4}{90}y^{(5)}(\xi_i), \xi_i \in (t_{i-1}, t_{i+1})\)

解析过程来自 Gemini 2.5 pro,并且也通过了笔者的验证。
为了找到使局部截断误差最小的系数,我们的策略是,假设近似解 \(w_i\) 等于真实解 \(y(t_i)\),然后将公式中的每一项围绕点 \(t_i\) 进行泰勒展开。通过匹配展开后 \(h\) 的同次幂的系数,我们使这个公式对于尽可能高阶的多项式都是精确的,从而达到最小化截断误差的目的。
我们把公式中的 \(y_{i+1}\), \(y_{i-1}\) 和 \(y'_{i+1}\) ( 即 \(f_{i+1}\)) 围绕 \(t_i\) 展开。设步长为 \(h\)。
- \(y_{i+1} = y(t_i + h) = y_i + h y'_i + \frac{h^2}{2} y''_i + \frac{h^3}{6} y'''_i + O(h^4)\)
- \(y_{i-1} = y(t_i - h) = y_i - h y'_i + \frac{h^2}{2} y''_i - \frac{h^3}{6} y'''_i + O(h^4)\)
- \(y'_{i+1} = y'(t_i + h) = y'_i + h y''_i + \frac{h^2}{2} y'''_i + O(h^3)\)
将上述展开式代入原公式中:
\(y_i + h y'_i + \frac{h^2}{2} y''_i + ... = a_0 y_i + a_1(y_i - h y'_i + \frac{h^2}{2} y''_i - ...) + \beta h(y'_i + h y''_i + ...)\)
现在,我们按 \(y\) 在 \(t_i\) 点的各阶导数(\(y_i, y'_i, y''_i\))来合并与整理等式右边的项:
\(y_i + h y'_i + \frac{h^2}{2} y''_i + ... = (a_0+a_1)y_i + h(-a_1+\beta)y'_i + h^2(\frac{a_1}{2}+\beta)y''_i + ...\)
为了让等式两边尽可能相等,我们令等式两边 \(h\) 的低次幂项的系数相等。这会给我们一个关于 \(a_0, a_1, \beta\) 的线性方程组。
-
匹配 \(y_i\) 的系数 ( 即 \(h^0\) 项 ):\(1 = a_0 + a_1\)(方程 1)
-
匹配 \(y'_i\) 的系数 ( 即 \(h^1\) 项 ):\(h(1 \cdot y'_i) = h(-a_1 + \beta)y'_i \implies 1 = -a_1 + \beta\)(方程 2)
-
匹配 \(y''_i\) 的系数 ( 即 \(h^2\) 项 ):\(h^2(\frac{1}{2} \cdot y''_i) = h^2(\frac{a_1}{2} + \beta)y''_i \implies \frac{1}{2} = \frac{a_1}{2} + \beta\)(方程 3)
解上述三元一次方程,最终得到:
- \(a_0 = \frac{4}{3}\)
- \(a_1 = -\frac{1}{3}\)
- \(\beta = \frac{2}{3}\)
Higher-Order Equations and Systems of Differential Equations⚓︎
m-th Order System of 1st-Order IVP⚓︎
初始条件为:\(u_1(a) = \alpha_1, u_2(a) = \alpha_2, \dots, u_m(a) = \alpha_m\)
令 \(\bm{y} = \begin{bmatrix}u_1 \\ \vdots \\ u_m\end{bmatrix}, \bm{f} = \begin{bmatrix}f_1 \\ \vdots \\ f_m\end{bmatrix}, \bm{\alpha} = \begin{bmatrix}\alpha_1 \\ \vdots \\ \alpha_m\end{bmatrix}\),可以得到:\(\begin{cases}\bm{y}'(t) = \bm{f}(t, \bm{y}) \\ \bm{y}(a) = \bm{\alpha}\end{cases}\)
Higher-Order Differential Equation⚓︎
思路:将高阶的微分方程归约到一个 1 阶的微分方程组。
令 \(u_1(t) = y(t), u_2(t) = y'(t), \dots, u_m(t) = y^{(m-1)}(t)\),得到:
初始条件为 \(u_1(a) = \alpha_1, u_2(a) = \alpha_2, \dots, u_m(a) = \alpha_m\)。
例子
使用欧拉法求解以下 IVP(\(h = 0.1\))
令 \(u_1(t) = y(t), u_2(t) = y'(t)\),得到:
初始条件为 \(u_1(0) = 0, u_2(0) = -0.5\)
根据
,计算:
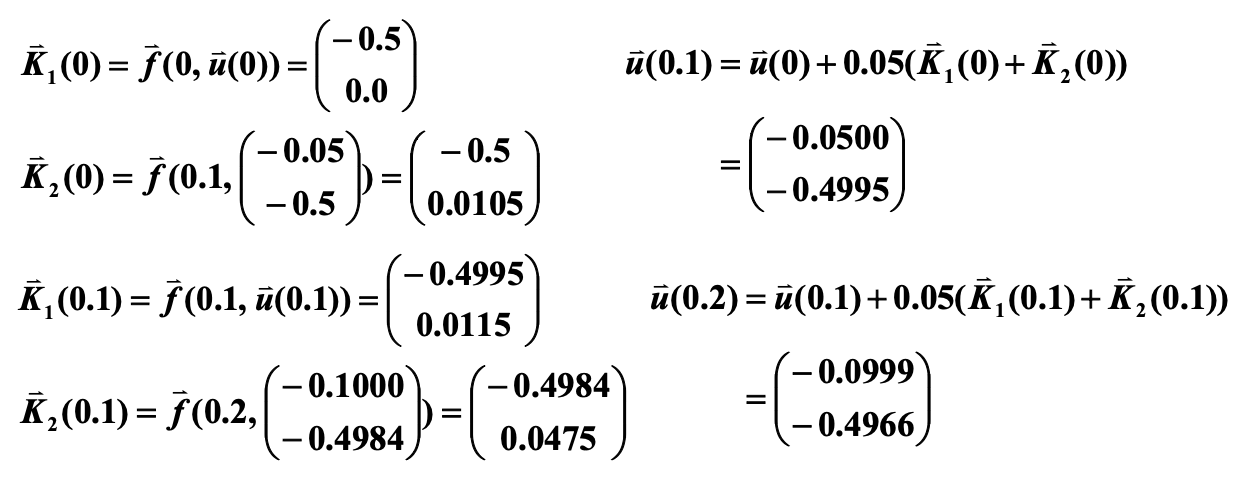
精确解为:\(y(t) = \dfrac{t^3 e^t}{6} - te^t + 2e^t - 1.5t - 2\)
Stability⚓︎
定义
-
当局部截断误差为 \(\tau_i(h)\) 的单微分方程法满足下面的条件时,我们认为它和近似得到的微分方程是一致的(consistent):
\[ \lim\limits_{h \rightarrow 0} \max\limits_{1 \le i \le n} |\tau_i(h)| = 0 \]对于多步法,还要求对于 \(i = 1, 2, \dots, m-1\),有 \(\lim\limits_{h \rightarrow 0}|w_i - y_i| = 0\)
-
当满足下面的条件时,我们认为一步微分方程法关于近似得到的微分方程收敛(convergent):
\[ \lim\limits_{h \rightarrow 0} \max\limits_{1 \le i \le n} |w_i - y_i| = 0 \]多步法和上面的一样。
-
若在初始条件中的小改变或小扰动产生对应较小的近似值变化,那么称该方法是稳定的(stable)。
讨论
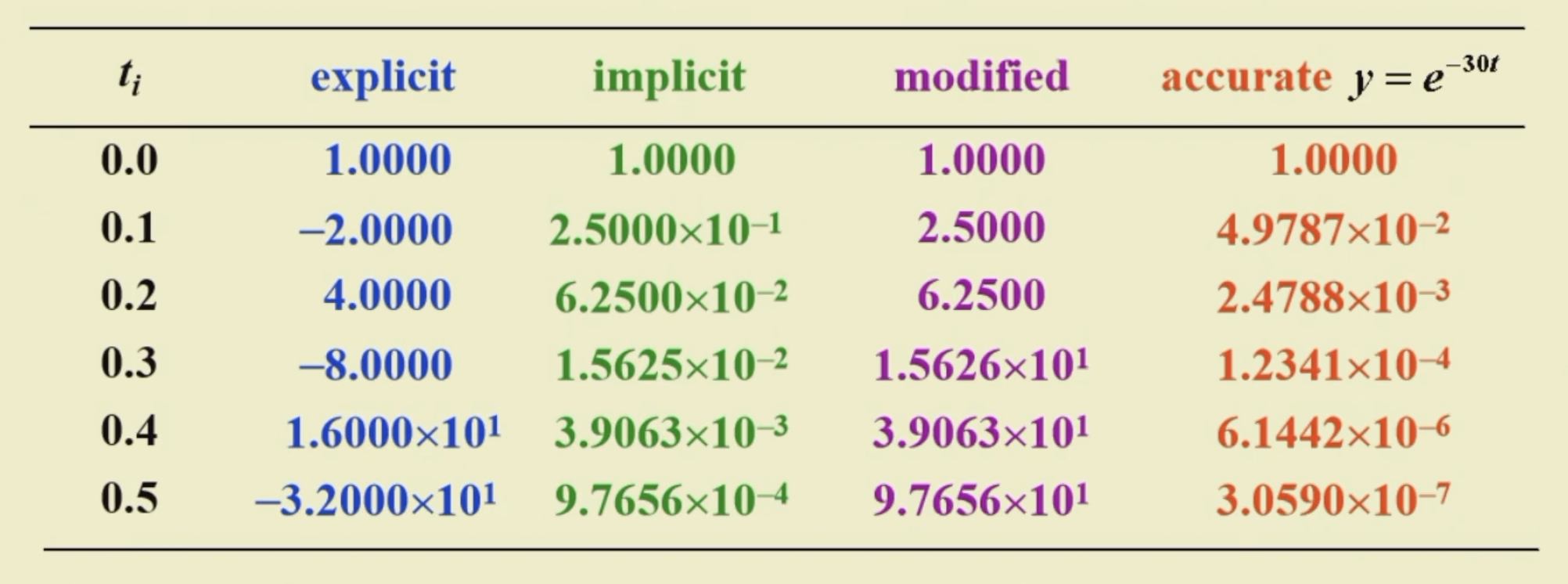
使用显式欧拉法、隐式欧拉法,以及改进欧拉法解决以下初值问题:\(y'(t) = -30y(t), y(0) = 1\),区间为 \([0, 0.5], h = 0.1\)。
定义
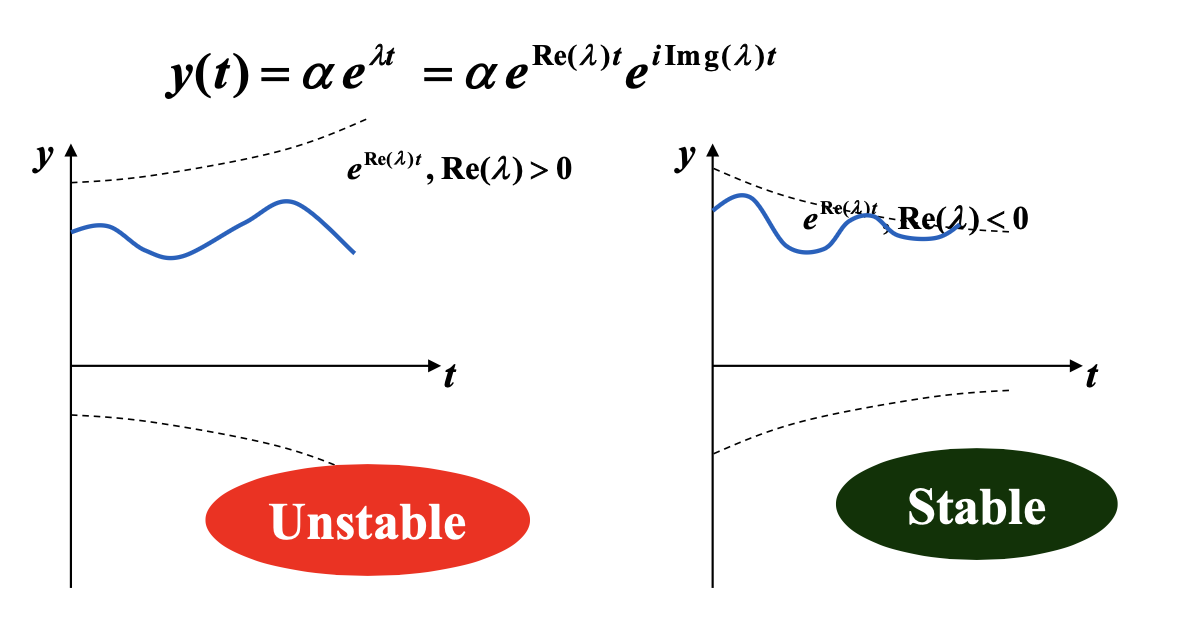
将某个方法用在一个简单的测试方程(test equation) 上:\(y' = \lambda y, y(0) = \alpha\),其中 \(\lambda\) 是复数且 \(\text{Re}(\lambda) < 0\)。假设舍入误差仅在初始点被引入。如果这个初始误差在特定步幅 \(h\) 上被缩小的话,那么该方法关于 \(H = \lambda h\) 是绝对稳定的(absolutely stable)。所有 \(H\) 构成的集合称为绝对稳定性区域(the region of absolute stability)。
当 \(A\) 的绝对稳定性区域大于 \(B\) 时,称法 \(A\) 比法 \(B\) 更稳定。
例子
例子
考虑显式欧拉法 \(w_{i+1} = w_i + hf_i\)
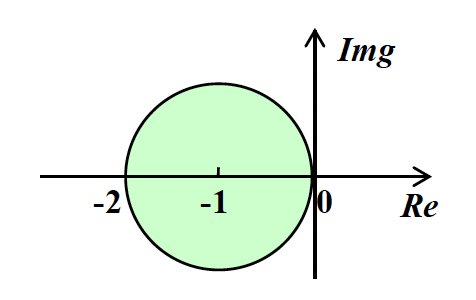
这里令 \(H = h \lambda\)
因此要想保证误差减小,必须满足 \(|1 + H| < 1\),对应的稳定性区域(绿色部分)如右图所示。
考虑隐式欧拉法 \(w_{i+1} = w_i + hf_{i+1}\)
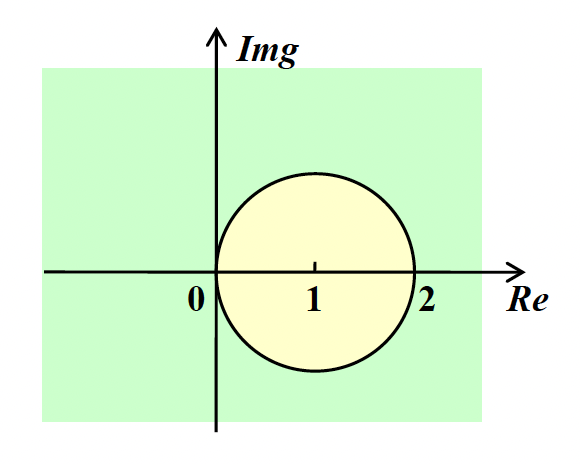
因此要想保证误差减小,必须满足 \(|1 - H| > 1\),对应的稳定性区域(绿色部分)如右图所示。
注
它是无条件稳定的(unconditionally stable),因为稳定性区域包含了整个左半平面,即 \(\text{Re}(\lambda) < 0\) 的情况。
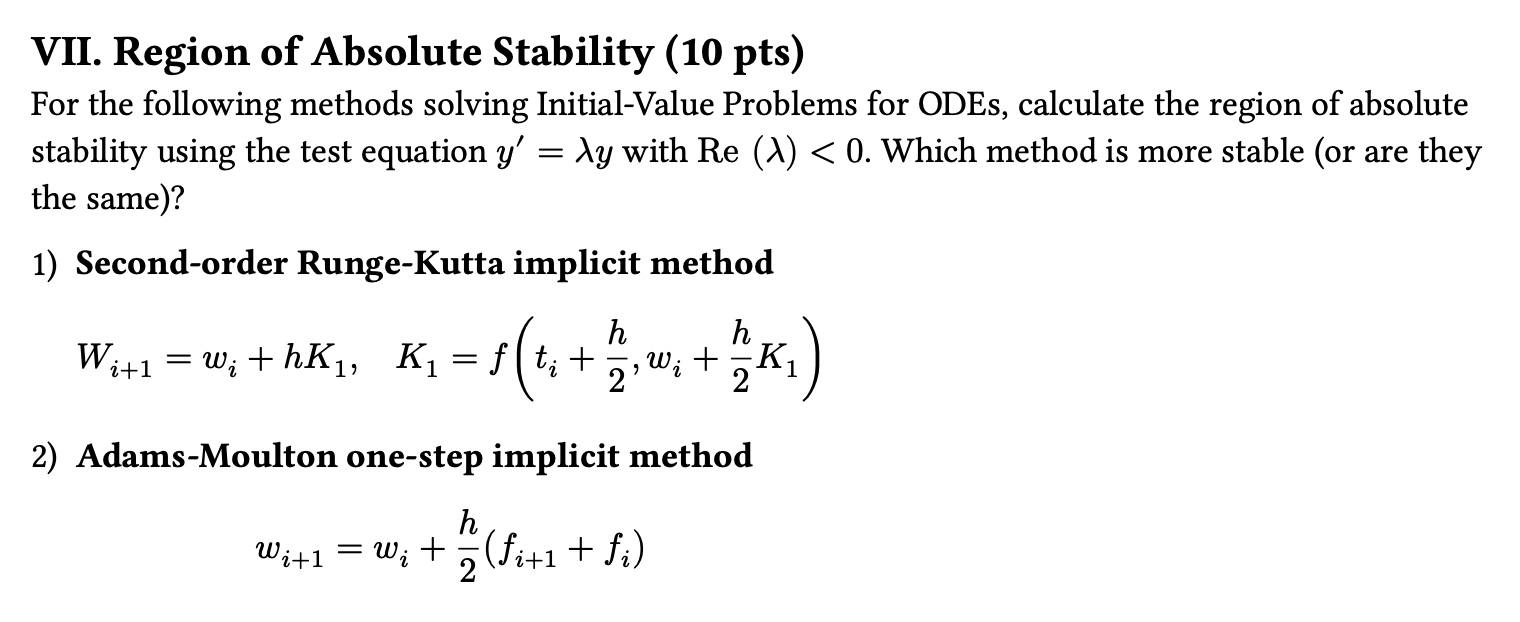
考虑 2 阶 Runge-Kutta 隐式法:
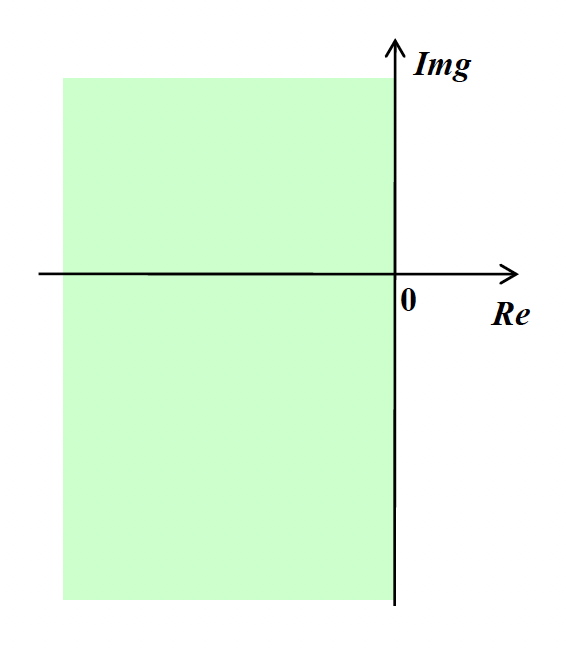
可以得到 \(K_1 = \dfrac{\lambda w_i}{1 - \frac{\lambda h}{2}} \Rightarrow w_{i+1} = \Big(\dfrac{2+H}{2-H}\Big)w_i \Rightarrow \Big|\dfrac{2+H}{2-H}\Big| < 1\)
注
它是无条件稳定的(unconditionally stable)。
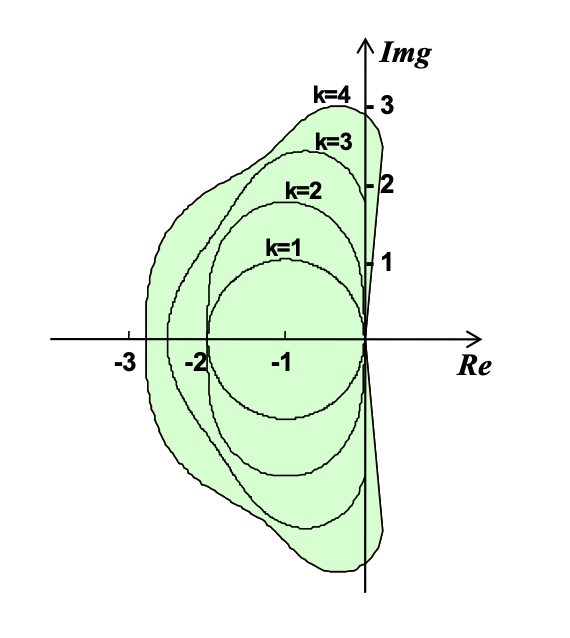
补充:1-4 阶的 Runge-Kutta 显式法
考虑以下 IVP 组(刚性组 (stiff system)
如何选择步幅 \(h\),以保证应用欧拉显式法之后的稳定性?
唯一解为:\(\begin{cases}u_1(t) = 2e^{-3t} - e^{-39t} + \dfrac{1}{3} \cos t \\ u_2(t) = -e^{-3t} + 2e^{-39t} - \dfrac{1}{3} \cos t\end{cases}\)。
矩阵 \(\begin{bmatrix}9 & 24 \\ -24 & -51\end{bmatrix}\) 的特征值为 \(\lambda_1 = -3, \lambda_2 = -39\)
\(-2 < \lambda h < 0 \Rightarrow h < \dfrac{2}{39} \approx 0.051\)
以下解答来自 Gemini 2.5 pro,且经过笔者验证。
-
二阶龙格 - 库塔隐式法
公式为 \(w_{i+1}=w_{i}+hK_{1}\),其中 \(K_{1}=f(t_{i}+\frac{h}{2},w_{i}+\frac{h}{2}K_{1})\)。
将 \(f(t,y) = \lambda y\) 代入 \(K_1\) 的方程:
\(K_1 = \lambda(w_i + \frac{h}{2}K_1) \implies K_1(1-\frac{h\lambda}{2})=\lambda w_i \implies K_1 = \frac{\lambda w_i}{1-\frac{h\lambda}{2}}\)
将其代入主公式:
\(w_{i+1} = w_i + h(\frac{\lambda w_i}{1-\frac{h\lambda}{2}}) = w_i(1+\frac{h\lambda}{1-\frac{h\lambda}{2}}) = w_i(\frac{1-\frac{h\lambda}{2}+h\lambda}{1-\frac{h\lambda}{2}}) = w_i(\frac{1+\frac{h\lambda}{2}}{1-\frac{h\lambda}{2}})\)
令 \(z=h\lambda\),增长因子为 \(Q(z) = \frac{1+z/2}{1-z/2}\)。绝对稳定区域要求 \(|Q(z)| \le 1\)。
\(|\frac{1+z/2}{1-z/2}| \le 1 \implies |1+z/2| \le |1-z/2|\)
设 \(z = x+iy\),则 \(|1+\frac{x}{2}+i\frac{y}{2}| \le |1-\frac{x}{2}-i\frac{y}{2}|\)。
两边平方得到 \((1+\frac{x}{2})^2+(\frac{y}{2})^2 \le (1-\frac{x}{2})^2+(-\frac{y}{2})^2\),化简得 \(1+x \le 1-x \implies 2x \le 0 \implies x \le 0\)。
这意味着 \(Re(z) = Re(h\lambda) \le 0\)。该方法的绝对稳定区域是整个复平面的左半平面。
-
亚当斯 - 莫尔顿一阶隐式法(即梯形法)
公式为 \(w_{i+1}=w_{i}+\frac{h}{2}(f_{i+1}+f_{i})\)。
将 \(f_i = \lambda w_i\) 和 \(f_{i+1} = \lambda w_{i+1}\) 代入:
\(w_{i+1} = w_i + \frac{h}{2}(\lambda w_{i+1} + \lambda w_i)\)
\(w_{i+1}(1-\frac{h\lambda}{2}) = w_i(1+\frac{h\lambda}{2})\)
\(w_{i+1} = w_i(\frac{1+\frac{h\lambda}{2}}{1-\frac{h\lambda}{2}})\)
这得到了与第一种方法完全相同的增长因子。因此,它的绝对稳定区域同样是整个复平面的左半平面。
综上,两种方法的绝对稳定区域是相同的。
对应的作业练习📝
对应小测 13、14、15💯
评论区