Chap 6: Direct Methods for Solving Linear Systems⚓︎
约 4447 个字 90 行代码 预计阅读时间 23 分钟
核心知识
- 高斯消元法
- 一些选取主元的策略
- 部分主元法
- 缩放部分主元法
- 完全主元法
- 矩阵分解:LU 分解
- 一些特殊矩阵
- 严格对角占优矩阵
- 正定矩阵 -> Choleski 法
- 三对角矩阵 -> Crout 分解
目标:求解 \(A \bm{x} = \bm{b}\)
注
在继续第 6 章(以及第 7 章)的学习前,建议先回顾线性代数的知识,否则理解起来可能比较吃力(但有些内容就是线性代数中学过的,比如下面的高斯消元法
逆矩阵的求解
个人比较喜欢高斯 - 约旦消元法(Gauss-Jordan elimination)(计算机也常用这种方法
- 构造增广矩阵 \([A | I]\)
- 对增广矩阵进行行初等变换(目标是将左侧的 \(A\) 变为单位矩阵 \(I\)
) :- 交换两行。
- 将某一行乘以一个非零常数。
- 将某一行的一个倍数加到另一行。
- 检查结果:如果左侧成功变为 \(I\),则右侧的矩阵就是 \(A^{-1}\)。如果左侧在变换过程中出现全零行(或列
) ,则 \(A\) 不可逆。
Linear Systems for Equations⚓︎
Gaussian Elimination⚓︎
高斯消元法(Gaussian elimination) 的基本思路:
- 首先将矩阵 \(A\) 归约成一个上三角(upper-triangular) 矩阵
- 然后通过回代(backward-substitution) 来求解未知量
先来看消元(elimination) 的实现:先令 \(A^{(1)} = A = (a_{ij}^{(1)})_{n \times n}, \bm{b}^{(1)} = \bm{b} = \begin{bmatrix}b_1^{(1)} \\ \vdots \\ b_n^{(1)}\end{bmatrix}\)
-
第 1 步:
- 如果 \(a_{11}^{(1)} \ne 0\),计算 \(m_{i1} = \dfrac{a_{i1}^{(1)}}{a_{11}^{(1)}}, (i = 2, \dots, n)\)
-
那么增广矩阵 (augmented matrix) 的第 \(i\) 行 \(\text{row}_i\) 为:\(m_{i1} \times \text{row}_1\),得到
\[ \left[ \begin{array}{cccc|c} a_{11}^{(1)} & a_{12}^{(1)} & \cdots & a_{1n}^{(1)} & b_1^{(1)} \\ 0 & & A^{(2)} & & \bm{b}^{(2)} \\ \end{array} \right] \]其中 \(\begin{cases}a_{ij}^{(2)} = a_{ij}^{(1)} - m_{i1} a_{1j}^{1} \\ b_i^{(2)} = b_i^{(1)} - m_{i1} b_1^{(1)}\end{cases}, (i, j = 2, \dots, n)\)
-
第 k 步:
- 如果 \(a_{kk}^{(k)} \ne 0\),计算 \(m_{ik} = \dfrac{a_{ik}^{(k)}}{a_{kk}^{(k)}}, (i = k+1, \dots, n)\)
- \(\begin{cases}a_{ij}^{(k+1)} = a_{ij}^{(k)} - m_{ik} a_{kj}^{k} \\ b_i^{(k+1)} = b_i^{(k)} - m_{ik} b_k^{(k)}\end{cases}, (i, j = k+1, \dots, n)\)
-
n-1 步后:
\[ \begin{bmatrix} a_{11}^{(1)} & a_{12}^{(1)} & \dots & a_{1n}^{(1)} \\ & a_{22}^{(2)} & \dots & a_{2n}^{(2)} \\ & & \dots & \vdots \\ & & & a_{nn}^{(n)}\end{bmatrix} \begin{bmatrix}x_1 \\ x_2 \\ \vdots \\ x_n\end{bmatrix} = \begin{bmatrix}b_1^{(1)} \\ b_2^{(2)} \\ \vdots \\ b_n^{(n)}\end{bmatrix} \]
接下来看回代:
- \(x_n = \dfrac{b_n^{(n)}}{a_{nn}^{(n)}}\)
- \(x_i = \dfrac{b_i^{(i)} - \sum\limits_{j=i+1}^n a_{ij}^{(i)} x_j}{a_{ii}^{(i)}}, (i = n - 1, \dots, 1)\)
- 我们必须找到最小的整数 \(k \ge i\) 且 \(a_{ki}^{(i)} \ne 0\),然后交换第 \(k\) 行和第 \(i\) 行
代码实现
求解 \(n \times n\) 线性方程组:
- 输入:未知量和方程的数量 \(n\);增广矩阵 \(A = (a_{ij})\),其中 \(1 \le i \le n, 1 \le j \le n+1\)
- 输出:解 \(x_1, x_2, \dots, x_n\),或者线性方程组没有唯一解的信息
Step 1 for i = 1, ..., n - 1 do Steps 2-4:
Step 2 Let p be the smallest integer with i <= p <= n and a[p][i] != 0;
if no integer p can be found
then Output('no unique solution exists');
STOP;
// row exchange
Step 3 if p != i then perform (E[p]) <-> (E[i]);
// elimination
Step 4 for j = i + 1, ..., n do Step 5 and 6:
Step 5 Set m[j][i] = a[j][i] / a[i][i]
Step 6 Perform (E[j] - m[j][i] * E[i]) -> (E[i])
Step 7 if a[n][n] = 0 then Output('no unique solution exists');
STOP;
// backward substitution
Step 8 Set x_n = a[n][n+1] / a[n][n]
Step 9 for i = n - 1, ..., 1 set x[i] = [a[i][n+1] - sum(j=i+1, n, a[i][j] * x[j])] / a[i][i];
Step 10 Output(x[1], ..., x[n]);
STOP; // success
Amount of Computation⚓︎
现在我们来统计一下计算量(仅考虑乘法 / 除法
- 消元:\(\sum\limits_{k=1}^{n-1} (n - k)(n - k + 2) = \dfrac{n^3}{3} + \dfrac{n^2}{2} - \dfrac{5}{6}n\)
- 回代:\(1 + \sum\limits_{i=1}^{n-1}(n - i + 1) = \dfrac{n^2}{2} + \dfrac{n}{2}\)
所以对于很大的 \(n\),乘法和除法的总数大约为 \(\textcolor{red}{\dfrac{n^3}{3}}\)。也就是说,高斯消元法的时间复杂度为 \(O(n^3)\)。
Pivoting Strategies⚓︎
除非有特殊说明,以下的 \(k\) 指的是第 \(k\) 次高斯消元。
一般高斯消元法的问题
在高斯消元的过程中,如果其中一个主元(pivot) \(a_{kk}^{(k)} = 0\),那么就需要进行行交换 \((E_k) \leftrightarrow (E_p)\),其中 \(p\) 是最小的满足 \(p > k\) 且 \(a_{pk}^{(k)} \ne 0\) 的整数。但为了减小舍入误差,即使主元并不等于 0 的时候也要做行交换。
如果 \(a_{kk}^{(k)}\) 相比 \(a_{jk}^{(k)}\) 较小的话,那么乘数 \(m_{jk} = \dfrac{a_{jk}^{(k)}}{a_{kk}^{(k)}}\) 会大于 1,导致误差的积累。并且在回代的时候,\(x_k\) 的值因为分母 \(a_{kk}^{(k)}\) 的值过小,其计算误差也会被放大。
所以,我们需要选取合适的主元以减小误差。下面给出一些选取主元的策略。
置换矩阵
找到合适的主元后,一般我们会做一个行交换。在后面涉及到矩阵分解的时候
比如 \(P_{12} = \begin{bmatrix}0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1\end{bmatrix}\) 表示交换第 1 行和第 2 行。如果 \(\bm{x} = \begin{bmatrix}x_1 \\ x_2 \\ x_3\end{bmatrix}\),那么 \(P_{12} \bm{x} = \begin{bmatrix}x_2 \\ x_1 \\ x_3\end{bmatrix}\)。
Partial Pivoting⚓︎
部分主元法(partial pivoting)(或称为最大列主元法 (maximal column pivoting)
代码实现
求解 \(n \times n\) 线性方程组:
- 输入:未知量和方程的数量 \(n\);增广矩阵 \(A = (a_{ij})\),其中 \(1 \le i \le n, 1 \le j \le n+1\)
- 输出:解 \(x_1, x_2, \dots, x_n\),或者线性方程组没有唯一解的信息
Step 1 for i = 1, ..., n set NROW(i) = i; // initialize row pointer
Step 2 for i = 1, ..., n - 1 do Steps 3-6: // elimination process
Step 3 Let p be the smallest integer with i <= p <= n and
|a(NROW(p), i)| = max_{i <= j <= n}|a(NROW(j), i)|;
Step 4 if a(NROW(p), i) = 0 then Output('no unique solution exists');
STOP;
Step 5 if NROW(i) != NROW(p) then set NCOPY = NROW(i); // simulated row interchange
NROW(i) = NROW(p);
NROW(p) = NCOPY;
Step 6 for j = i + 1, ..., n do Steps 7-8:
Step 7 Set m(NROW(j), i) = a(NROW(j), i) / a(NROW(i), i);
Step 8 Perform (E_NROW(j) - m(NROW(j), i) * E_NROW(i)) -> (E_NROW(j));
Step 9 if a(NROW(n), n) = 0 then Output('no unique solution exists');
STOP;
// start backward substitution
Step 10 Set x[n] = a(NROW(n), n + 1) / a(NROW(n), n);
Step 11 for i = n - 1, ..., 1
set x[i] = (a(NROW(i), n + 1) - sum(j=i+1, n, a(NROW(i), j) * x[j])) / a(NROW(i), i);
Step 12 Output(x[1], ..., x[n]); // procedure completed successfully
STOP;
例子
求解线性方程组 \(\begin{cases}30.00 x_1 + 594100 x_2 = 591700 \\ 5.291 x_1 - 6.130 x_2 = 46.78\end{cases}\),舍入精度为 4 位。
可以看到,虽然根据部分主元法,解方程时无需交换行,然而注意到第一个方程中同一行的元素量级相差巨大,而第二行元素的量级比较接近,所以会产生较大的误差(这也反映了部分主元法的缺陷
Scaled Partial Pivoting⚓︎
缩放部分主元法(scaled partial pivoting)(或称为缩放列主元法 (scaled-column pivoting)
- 第 1 步:定义每一行的缩放因子(scale factor) \(s_i = \max\limits_{1 \le j \le n} |a_{ij}|\)(即每行中绝对值最大的元素)
- 第 2 步
: (对于第 \(k\) 次高斯消元, )找到最小的 \(p \ge k\),使得 \(\dfrac{|a_{pk}^{(k)}|}{s_p} = \max\limits_{k \le i \le n} \dfrac{|a_{ik}^{(k)}|}{s_i}\),然后交换第 \(p\) 行和第 \(k\) 行
注
缩放因子只计算一次(在高斯消元前
代码实现
和部分主元法的实现相比,区别在于前 3 步,后续步骤都是一样的,因此下面只列出前 3 步:
Step 1 for i = 1, ..., n set s_i = max_{1 <= j <= n}(|a_ij|);
if s_i = 0 then Output('no unique solution exists');
STOP;
Step 2 for i = 1, ..., n - 1 do Steps 3-6: // elimination process
Step 3 Let p be the smallest integer with i <= p <= n and
|a(NROW(p), i)| / s(NROW(p)) = max_{i <= j <= n}(|a(NROW(j), i)| / s(NROW(j)));
缩放部分主元法的好处在哪里?
一般的部分主元法考虑的是绝对大小(当前列绝对值最大的元素
Complete Pivoting⚓︎
完全主元法(complete pivoting)(或称为最大主元法 (maximal pivoting)
Amount of Computation⚓︎
- 部分主元法:需要 \(O(n^2)\) 次比较
- 缩放部分主元法:需要 \(O(n^2)\) 次比较,以及 \(O(n^2)\) 次除法(初始计算)
- 完全主元法:需要 \(O(\dfrac{n^3}{3})\) 次比较
所以,要想追求更好的稳定性,就要以更大的计算量为代价。
注
如果新的缩放因子在行交换的时候才被确定,那么缩放部分主元法需要 \(O(\dfrac{n^3}{3})\) 次额外的比较,以及 \(O(n^2)\) 次除法
Matrix Factorization⚓︎
高斯消元法是一种简单粗暴的方法,但效率不是很高。因此下面介绍一种基于高斯消元法实现的改进方法——矩阵分解(matrix factorization)。它的计算过程如下:
-
第 1 步:
- \(m_{i1} = \dfrac{a_{i1}}{a_{11}} (a_{11} \ne 0)\)
- 令 \(L_1 = \begin{bmatrix}1 & & & \\ -m_{21} & 1 & & \\ \vdots & & \ddots \\ -m_{n1} & & &1\end{bmatrix}\)(这就是第一高斯变换矩阵(first Gaussian transformation matrix)
) ,那么 \(L_1 [A^{(1)} \quad \bm{b}^{(1)}] = \begin{bmatrix}a_{11}^{(1)} & \dots a_{1n}^{(1)} & b_1^{(1)} \\ 0 & A^{(2)} & \bm{b}^{(2)}\end{bmatrix}\)
-
第 k 步:
- 第 k 高斯变换矩阵(kth Gaussian transformation matrix):\(L_k = \begin{bmatrix}1 & & & & \\ & \ddots & & & \\ & & 1 & & \\ & & -m_{k+1, k} & & \\ & & \vdots &\ddots & \\ & & -m_{n, k} & & 1\end{bmatrix}\)(空的地方都是 0)
-
第 n-1 步:
\[ L_{n-1}L_{n-2} \dots L_1 [A \quad \bm{b}] = \begin{bmatrix}a_{11}^{(1)} & a_{12}^{(1)} & \dots & a_{1n}^{(1)} & b_1^{(1)}\\ & a_{22}^{(2)} & \dots & a_{2n}^{(2)} & b_2^{(2)} \\ & & \dots & \vdots & \vdots\\ & & & a_{nn}^{(n)} & b_n^{(n)}\end{bmatrix} \]
定理
若高斯消元法能够在不使用行互换的基础上求解线性方程组 \(A \bm{x} = \bm{b}\),那么矩阵 \(A\) 可以被因式分解为一个下三角矩阵 \(L\) 和上三角矩阵 \(U\) 的乘积,即 \(A = LU\)。
其中:
如果矩阵 \(L\) 是单位的(unitary)(也就是说主对角线元素都是 1
唯一性证明
如果分解不是唯一的,那么存在 \(L_1, L_2, U_1, U_2\),使得 \(A = L_1 U_1 = L_2 U_2\),因此:
注
如果 \(U\) 也是单位的,那么这种分解就称为Crout 分解。我们可通过对 \(A^T\) 的 \(LU\) 分解来实现 Crout 分解。也就是说,找到 \(A^T = LU\),那么 \(A = U^T L^T\) 就是 \(A\) 的 Crout 分解。
\(LU\) 分解的代码实现
将 \(n \times n\) 的矩阵 \(A = (a_{ij})\) 分解为下三角矩阵 \(L = (l_{ij})\) 和上三角矩阵 \(U = (u_{ij})\),也就是说 \(A = LU\),其中 \(L\) 或 \(U\) 的主对角线元素均为 1。
- 输入:维度 \(n\);\(A\) 的元素 \(a_{ij}, 1 \le i, j \le n\);\(L\) 的对角元素 \(l_{11} = \dots = l_{nn} = 1\) 或 \(U\) 的对角元素 \(u_{11} = \dots = u_{nn} = 1\)
- 输出:\(L\) 的项 \(l_{ij}, 1 \le j \le i, 1 \le i \le n\),以及 \(U\) 的项 \(u_{ij}, i \le j \le n, 1 \le i \le n\)
Step 1 Select l_11 and u_11 satisfying l_11 * u_11 = a_11;
if l_11 * u_11 = 0 then Output('Factorization impossible');
Stop;
Step 2 for j = 2, ..., n set u_1j = a_1j / l_11; // first row of U
l_j1 = a_j1 / u_11; // first column of L
Step 3 for i = 2, ..., n - 1 do Steps 4 and 5:
Step 4 Select l_ii and u_ii safisfying l_ii * u_ii = a_ii - sum(k=1, i-1, l_ik * u_ki);
if l_ii * u_ii = 0 then Output('Factorization impossible');
Stop;
Step 5 for j = i + 1, ..., n:
set u_ij = 1 / l_ii * (a_ij - sum(k=1, i-1, l_ik * u_kj)); // ith row of U
set l_ji = 1 / u_ii * (a_ji - sum(k=1, i-1, l_jk * u_ki)); // ith column of L
Step 6 Select l_nn and u_nn satisfying l_nn * u_nn = a_nn - sum(k=1, n-1, l_nk * u_kn);
// if l_nn * u_nn = 0, then A = LU but A is singular
Step 7 Output(l_ij for j = 1, ..., i and i = 1, ..., n);
Output(u_ij for j = i, ..., n and i = 1, ..., n);
STOP;
这样我们只得到了 \(L\) 和 \(U\),还没有解出这个线性方程组(矩阵
因为 \(A \bm{x} = LU \bm{x} = \bm{b}\),所以我们令 \(\bm{y} = U\bm{x}\),
- 先解 \(L \bm{y} = \bm{b}\)
- \(y_1 = \dfrac{b_1}{l_{11}}\)
- \(y_i = \dfrac{1}{l_{ii}} \Big[b_i - \sum\limits_{j=1}^{i-1} l_{ij} y_j\Big]\)
- 再解 \(U \bm{x} = \bm{y}\)
- \(x_n = \dfrac{y_n}{u_{nn}}\)
- \(x_i = \dfrac{1}{u_{ii}} \Big[y_i - \sum\limits_{j=i+1}^n u_{ij} x_j\Big]\)
高斯消元法 v.s. LU 分解(by Gemini 2.5 Flash)
| 特性 | 一般高斯消元法(直接对 \([A\|b]\)) | LU 分解 |
|---|---|---|
| 基本思想 | 将 \([A\|b]\) 转化为 \([U'\|b']\) | 将 \(A\) 分解为 \(L\) 和 \(U\) |
| 求解 \(Ax=b\) | 每次 \(O(N^3)\) | 分解 \(O(N^3)\),每次求解 \(O(N^2)\) |
| 多右端向量 | 每次 \(O(N^3)\) | 高效:分解一次 \(O(N^3)\),后续每次 \(O(N^2)\) |
| 计算 \(A^{-1}\) | \(O(N^4)\) | 高效:\(O(N^3)\) |
| 计算 \(\det(A)\) | 需记录消元过程 | 直接:对角线元素乘积 |
| 结构 | 紧密耦合 \(A\) 和 \(b\) | 模块化:分解与求解分离 |
| 存储 | 每次重新计算 | \(L, U\) 可存储重用 |
| 数值稳定性 | 依赖于主元选择 | 依赖于主元选择,通常与主元法结合 |
Special Types of Matrices⚓︎
Strictly Diagonally Dominant Matrix⚓︎
严格对角占优矩阵(strictly diagonally dominant matrix) 满足:
其中对角线元素的绝对值严格大于该行其余所有非对角元素绝对值之和。
定理
- 严格对角占优矩阵 \(A\) 是非奇异的(nonsigular)(即行列式不为 0,且存在逆矩阵)
- 在这种矩阵上使用高斯消元法无需行或列的互换
- 并且计算将相对于舍入误差的增长保持稳定
证明
- \(A\) 是非奇异的——反证法证明
- 高斯消元法无需行或列的互换——归纳法证明:通过高斯消元法得到的每一个矩阵 \(A^{(2)}, A^{(3)}, \dots, A^{(n)}\) 都是严格对角占优的
- 略过
Choleski's Method for Positive Definite Matrix⚓︎
定义
对于一个矩阵 \(A\),如果它是对称的,且 \(\forall \bm{x} \ne \bm{0}, \bm{x}^T A \bm{x} > 0\) 成立,那么称该矩阵是正定(positive definite) 矩阵。
定理
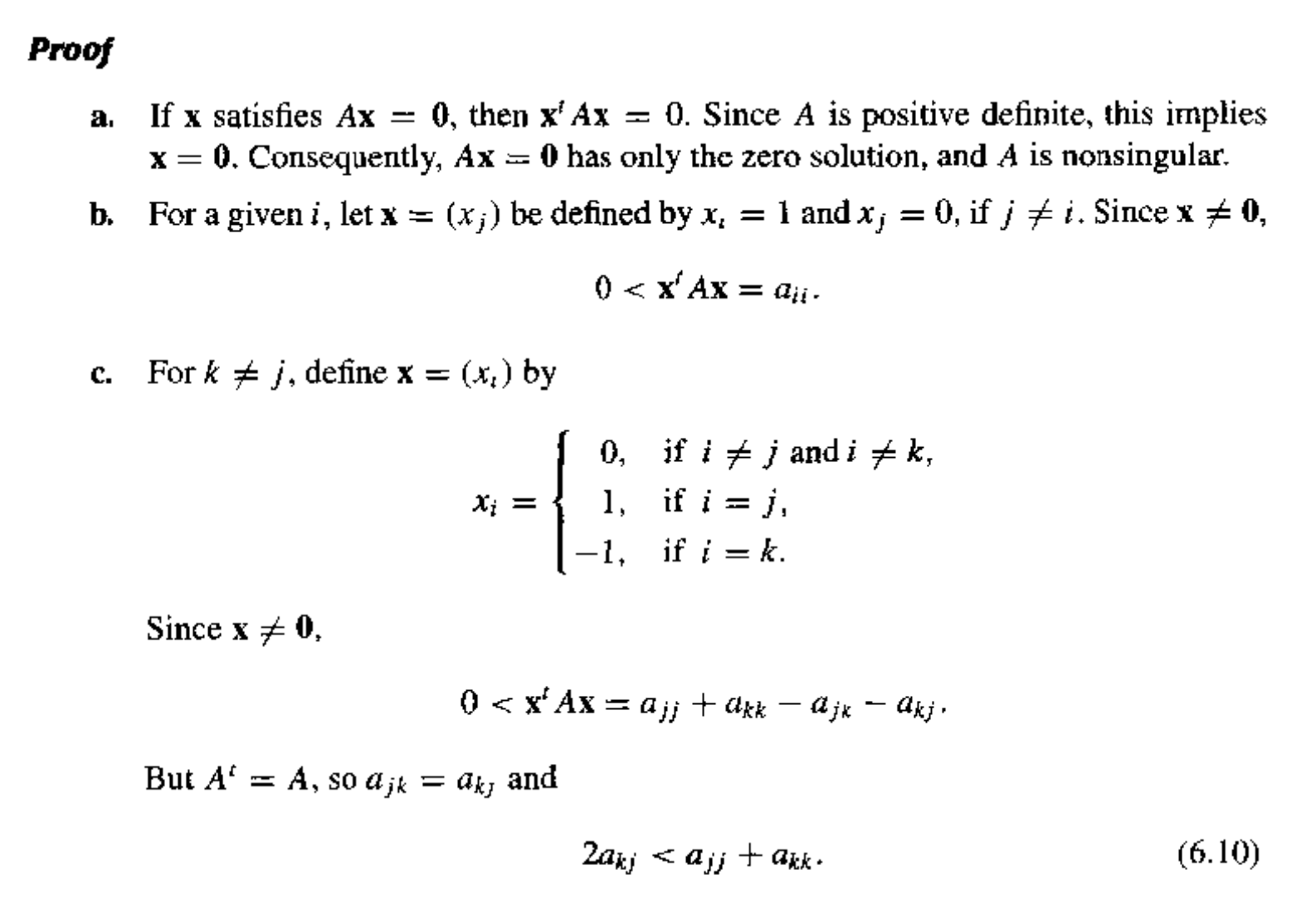
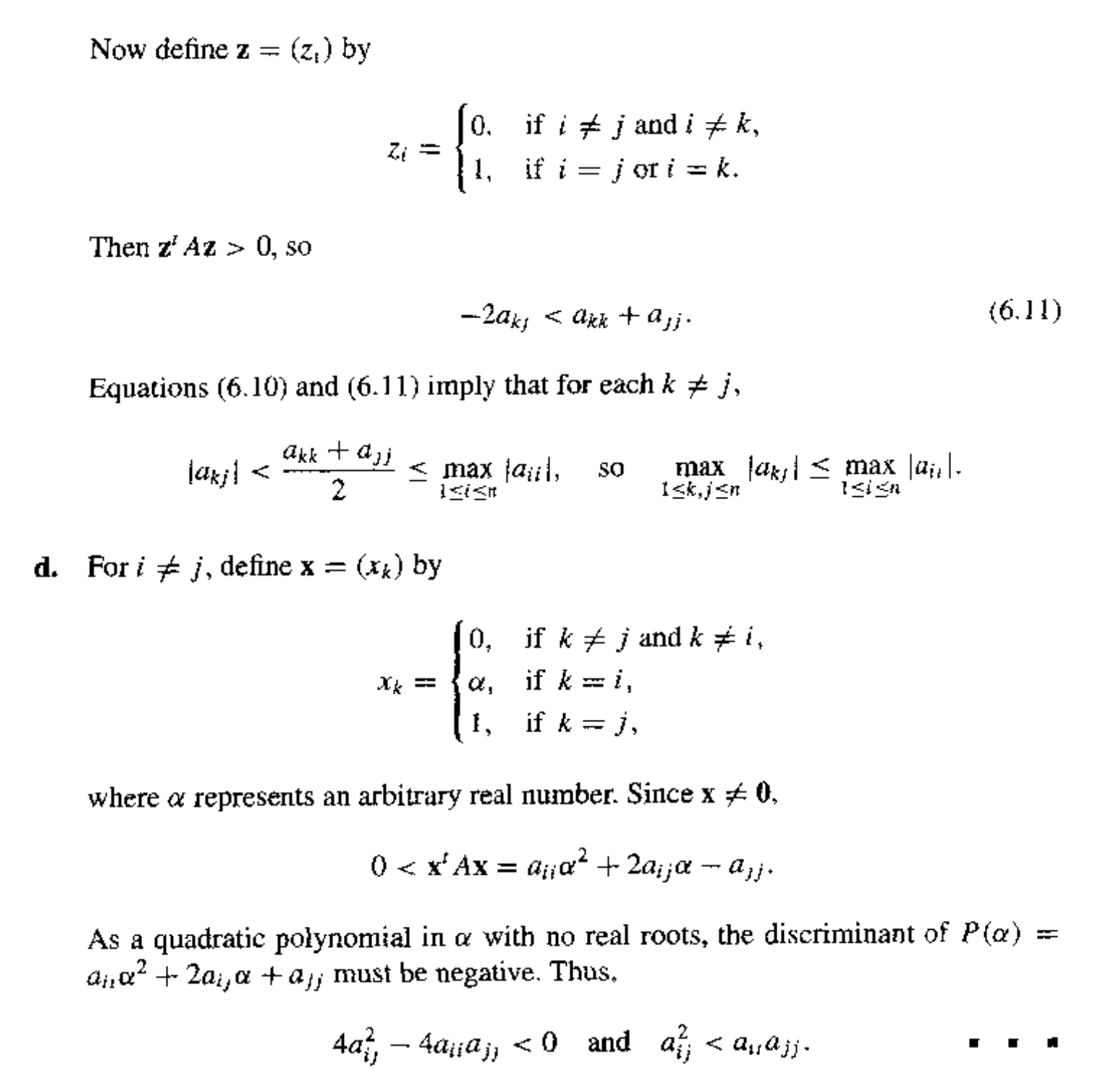
正定矩阵 \(A\) 的性质:
a. \(A\) 是非奇异的
b. \(a_{ii} > 0, i = 1, 2, \dots n\)
c. \(\max_{1 \le k, j \le n} |a_{kj}| \le \max_{1 \le i \le n} |a_{ii}|\)
d. \((a_{ij})^2 < a_{ii} a_{jj}, i \ne j\)
PPT 上还有这些性质:
- \(A^{-1}\) 也是正定的
- \(A\) 的每个前导主子矩阵(leading principal submatrices) \(A_k\) 的行列式 (determinant) 都是正的
前导主子矩阵
矩阵 \(A\) 的前导主子矩阵为 \(A_k = \begin{bmatrix}a_{11} & a_{12} & \dots & a_{1k} \\ a_{21} & a_{22} & \dots & a_{2k} \\ \vdots & \vdots & \ddots & \vdots \\ a_{k1} & a_{k2} & \dots & a_{kk} \end{bmatrix}, 1 \le k \le n\)
证明
我们将 \(A = LU\) 中的 \(U\) 进一步拆分成对角矩阵 \(D\) 和单位上三角矩阵 \(\widetilde{U}\):
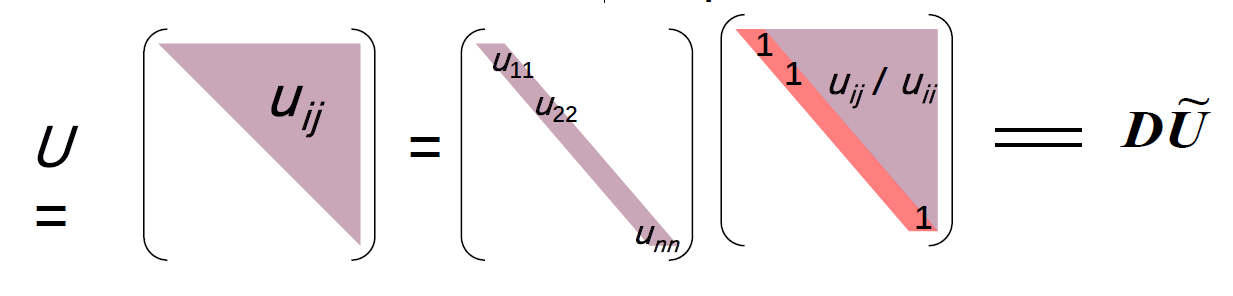
可以推导出:\(A\) 是对称矩阵(\(A = A^T \rightarrow LU = LD \widetilde{U} = \widetilde{U^T} DL^T\))\(\Rightarrow L = \widetilde{U}^T \Rightarrow A = LDL^T\)。这样我们得到了另一种矩阵分解—— \(LDL^T\) 分解:
\(LDL^T\) 分解的代码实现
将 \(n \times n\) 的矩阵 \(A = (a_{ij})\) 分解为 \(LDL^T\) 的形式,其中 \(L\) 是下三角矩阵,对角线元素均为 1;\(D\) 为对角矩阵,对角线上的元素均为正数。
- 输入:维度 \(n\);\(A\) 的元素 \(a_{ij}, 1 \le i, j \le n\)
- 输出:\(L\) 的项 \(l_{ij}, 1 \le j \le i, 1 \le i \le n\),以及 \(D\) 的项 \(u_{i}, 1 \le i \le n\)
令 \(D^{\frac{1}{2}} = \begin{bmatrix}\sqrt{u_{11}} & & & \\ & \sqrt{u_{22}} & & \\ & & & & \\ & & & \sqrt{u_{nn}}\end{bmatrix}\),\(\widetilde{L} = LD^{\frac{1}{2}}\) 仍然是一个上三角矩阵,因此 \(A = \widetilde{L} \widetilde{L}^T\)
因为前导主子矩阵都是正的,所以 \(u_{ii} > 0\)
综上,若 \(A\) 是正定矩阵,那么:
- 当 \(L\) 是一个对角线元素均为 1 的下三角矩阵,并且 \(D\) 是一个对角项均为正数的对角矩阵时,\(A\) 可被分解为 \(LDL^T\)
- 当 \(L\) 是一个对角线上均为非零元素的下三角矩阵时,\(A\) 可被分解为 \(LL^T\)
算法:Choleski 法
目标:将规模为 \(n \times n\) 的对称的正定矩阵 \(A\) 分解为 \(LL^T\),其中 \(L\) 是下三角矩阵。
输入:\(n\) 维矩阵 \(A\),其元素为 \(a_{ij}, 1 \le i, j \le n\)
输出:矩阵 \(L\),其元素为 \(l_{ij}, 1 \le j \le i, 1 \le i \le n\)
Step 1 set l_11 = sqrt(a_11);
Step 2 for j = 2, ..., n, set l_j1 = a_j1 / l_11;
Step 3 for i = 2, ..., n - 1 do steps 4 and 5
Step 4 set l_ii = sqrt(a_ii - sum(pow(l_ik, 2), 1, i - 1))
// LDL^T is faster, but must be modified to solve Ax = b
Step 5 for j = i + 1, ..., n, set l_ji = (a_ji - sum(l_jk * l_ik, 1, i - 1)) / l_ii;
Step 6 set l_nn = sqrt(a_nn - sum(pow(l_nk, 2), 1, n - 1))
Step 7 output (l_ij for j = 1, ..., i and i = 1, ..., n);
Stop.
Choleski 法的优点(by Gemini 2.5 Flash)
- 数值稳定性高:Choleski 法在数值上非常稳定,因为它不需要主元选择。由于矩阵是正定的,可以保证对角线元素 \(l_{ii}\) 的平方根总是正实数,并且不会出现除以零的情况。
- 计算效率高:相比于一般的 LU 分解(需要 \(2N^3/3\) 次浮点运算
) ,Choleski 法只需要大约 \(N^3/3\) 次浮点运算,因为它利用了矩阵的对称性,只需要计算 \(L\) 的下三角部分(或 \(U\) 的上三角部分) 。这使得它在处理大型对称正定系统时非常高效。 - 存储效率高:由于 \(L\) 和 \(L^T\) 之间存在关系,我们只需要存储 \(L\)(或 \(U\)
) ,这节省了存储空间。 - 保证正定性:如果 Choleski 法成功完成(即所有 \(l_{ii}\) 都是正实数
) ,则可以确认原始矩阵是正定的。反之,如果分解过程中遇到负数或零的平方根,则矩阵不是正定的。
Crout Reduction for Tridiagonal Linear System⚓︎
带状矩阵
对于一个 \(n \times n\) 的矩阵,如果有整数 \(p, q\),满足 \(1 < p, q < n\),当 \(i + p \le j\) 或 \(j + q \le i\) 时,有 \(a_{ij} = 0\),那么称该矩阵为带状矩阵(band matrix),其带宽(bandwidth) 为 \(w = p + q - 1\)。
当 \(p = q = 2\) 时,\(w = 3\),此时的矩阵称为三对角矩阵(tridiagonal matrix),其形式如下:
对于上述形式的线性方程组(\(A \bm{x} = \bm{f}\)
-
寻找矩阵 \(A\) 的 Crout 分解,\(L, U\) 分别为:
\[ L = \begin{bmatrix}l_{11} & 0 & \dots & \dots & 0 \\ l_{21} & l_{22} & \ddots & & \vdots \\ 0 & \ddots & \ddots & \ddots & 0 \\ 0 & \dots & 0 & l_{n, n-1} & l_{nn}\end{bmatrix} \quad U = \begin{bmatrix}1 & u_{12} & 0 & \dots & 0 \\ 0 & 1 & \ddots & \ddots & \vdots \\ \vdots & & \ddots & \ddots & u_{n-1, n} \\ 0 & \dots & \dots & 0 & 1\end{bmatrix} \] -
求解 \(L\bm{y} = \bm{f} \Rightarrow y_1 = \dfrac{f_1}{l_{11}}, y_i = \dfrac{(f_i - l_{i, i-1} y_{i-1})}{l_{ii}} (i = 2, \dots, n)\)
- 求解 \(U\bm{x} = \bm{y} \Rightarrow x_n = y_n, x_i = y_i - u_{i,i+1} x_{i+1}\)
定理
如果 \(A\) 是三对角线矩阵,且是对角线占优的,并满足 \(|b_1| > |c_1| > 0, |b_n| > |a_n| > 0, a_i \ne 0, c_i \ne 0\),那么 \(A\) 是非奇异的,对应的线性方程组有解。
注
- 如果 \(A\) 是严格对角占优的,那么没有必要让所有的 \(a_i, b_i, c_i\) 都是非零的
- 该方法是稳定的,因为所有从计算过程中获得的值会被约束在原有元素的范围内
- 计算量为 \(O(n)\)
代码实现
求解 \(n \times n\) 的线性方程组:
假设这个线性方程组有唯一解。
- 输入:维度 \(n\);\(A\) 的元素
- 输出:解 \(x_1, \dots, x_n\)
Step 1 Set l_11 = a_11;
u_12 = a_12 / l_11;
z_1 = a_{1,n+1} / l_11;
Step 2 for i = 2, ..., n-1 set l_{i, i-1} = a_{i, i-1}; // ith row of L
l_ii = a_ii - l_{i, i-1} * u_{i-1, i};
u_{i, i+1} = a_{i, i+1} / l_ii; // (i+1)th column of U
z_i = (a_{i, n+1} - l_{i, i-1} * z_{i-1}) / l_ii;
Step 3 Set l_{n, n-1} = a_{n, n-1}; // nth row of L
l_nn = a_nn - l_{n, n-1} * u_{n-1, n};
z_n = (a_{n, n+1} - l_{n, n-1} * z_{n-1}) / l_nn;
// Step 4 and 5 solve Ux = z
Step 4 x_n = z_n;
Step 5 for i = n-1, ..., 1 set x_i = z_i - u_{i, i+1} * x_{i+1};
Step 6 Output(x_1, ..., x_n);
STOP;
对应的作业练习📝
对应小测 3 和 4💯
评论区